Page 1
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
1
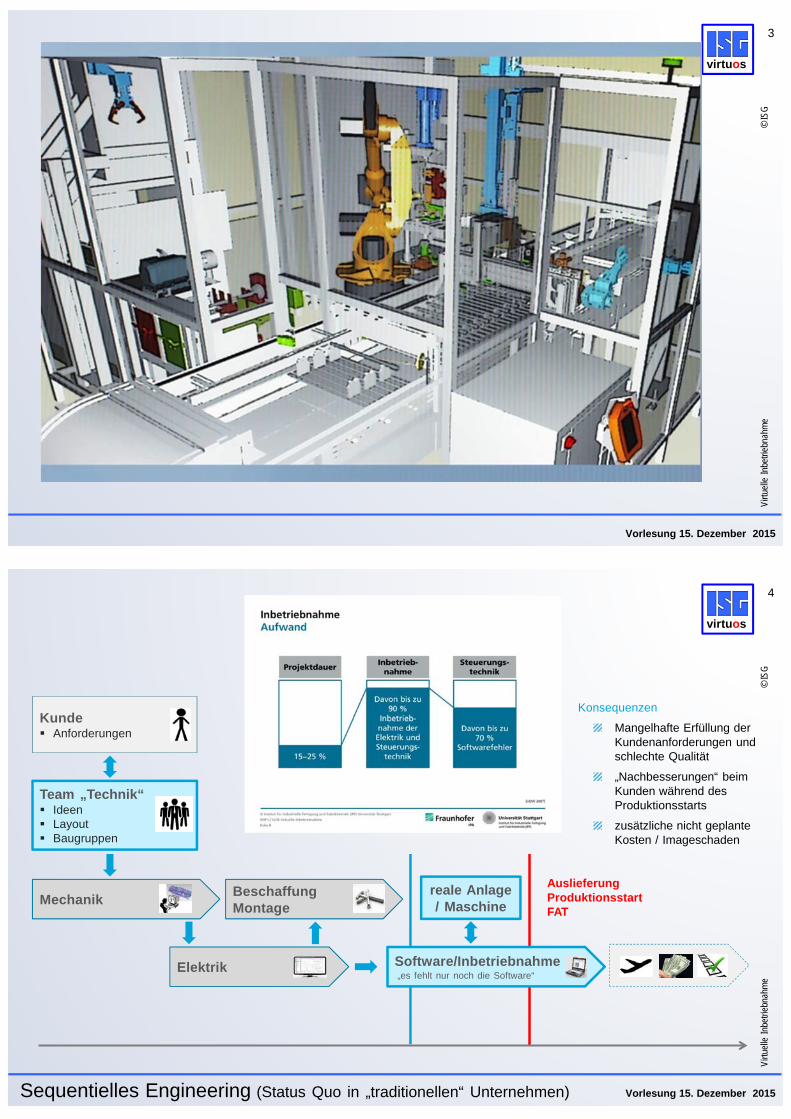
Virtuelle Inbetriebnahme von
Maschinen und Anlagen
Dr.-Ing. Dieter ScheifeleGeschäftsführender Gesellschafter ISG
http://www.isg-stuttgart.de/de/isg-virtuos/virtuos-downloads.html, Vorträge und Vorlesungen
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
2
Unternehmen - ISG
Geschäftsfeld ISG-virtuos (seit 2005)
Simulationssoftware virtuelle Inbetriebnahme (VIBN),
Hardware-in-the-Loop in Echtzeit (1ms),
Simulation-Based-Engineering
Kunden Maschinen- und Anlagenbauer,
Engineering-Büros (Integratoren),
Anlagenbetreiber
ISG Industrielle Steuerungstechnik GmbH
Dr.-Ing. Dieter Scheifele
Geschäftsfeld ISG-kernel (seit 1987)
Steuerungssoftware CNC, RC, Motion Control
Kunden Steuerungshersteller sowie
Maschinen- und Anlagenbauer
Page 2
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
3
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
4
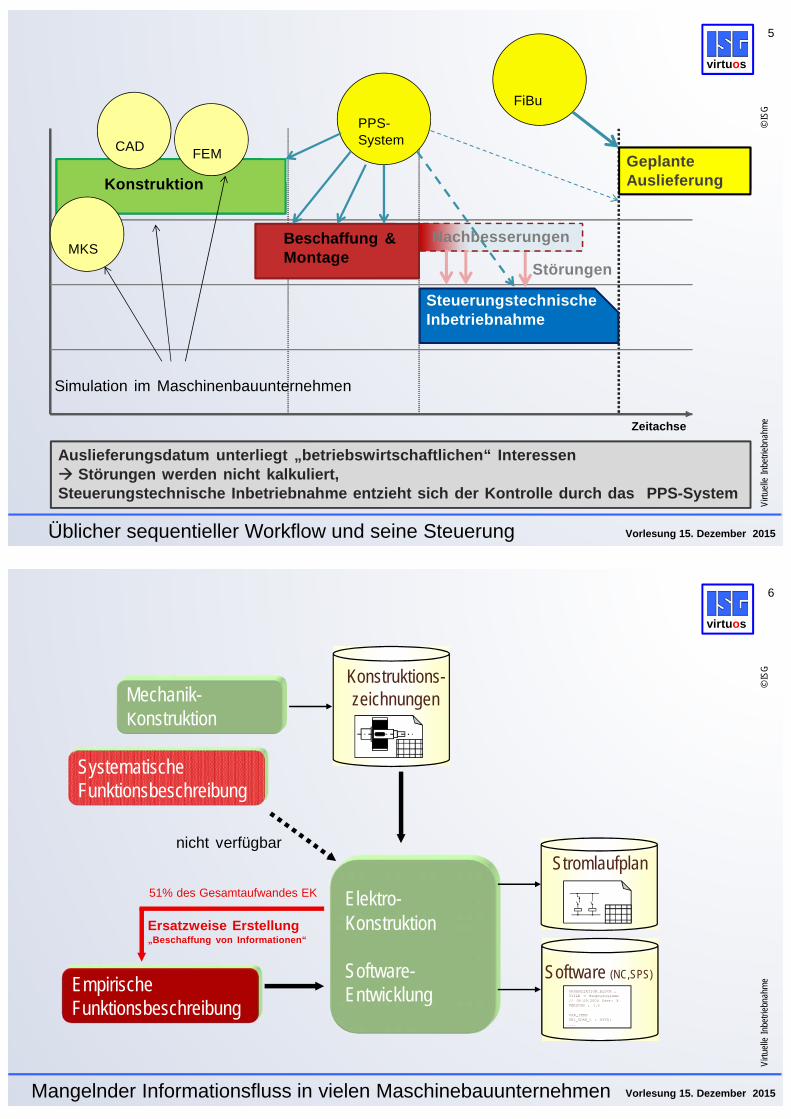
Sequentielles Engineering (Status Quo in „traditionellen“ Unternehmen)
BeschaffungMontage
Mechanik
Kunde Anforderungen
Team „Technik“ Ideen Layout Baugruppen
• Konsequenzen
Mangelhafte Erfüllung der Kundenanforderungen und schlechte Qualität
„Nachbesserungen“ beim Kunden während des Produktionsstarts
zusätzliche nicht geplante Kosten / Imageschaden
Auslieferung ProduktionsstartFAT
Software/Inbetriebnahme„es fehlt nur noch die Software“
Elektrik
reale Anlage / Maschine
Page 3
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
5
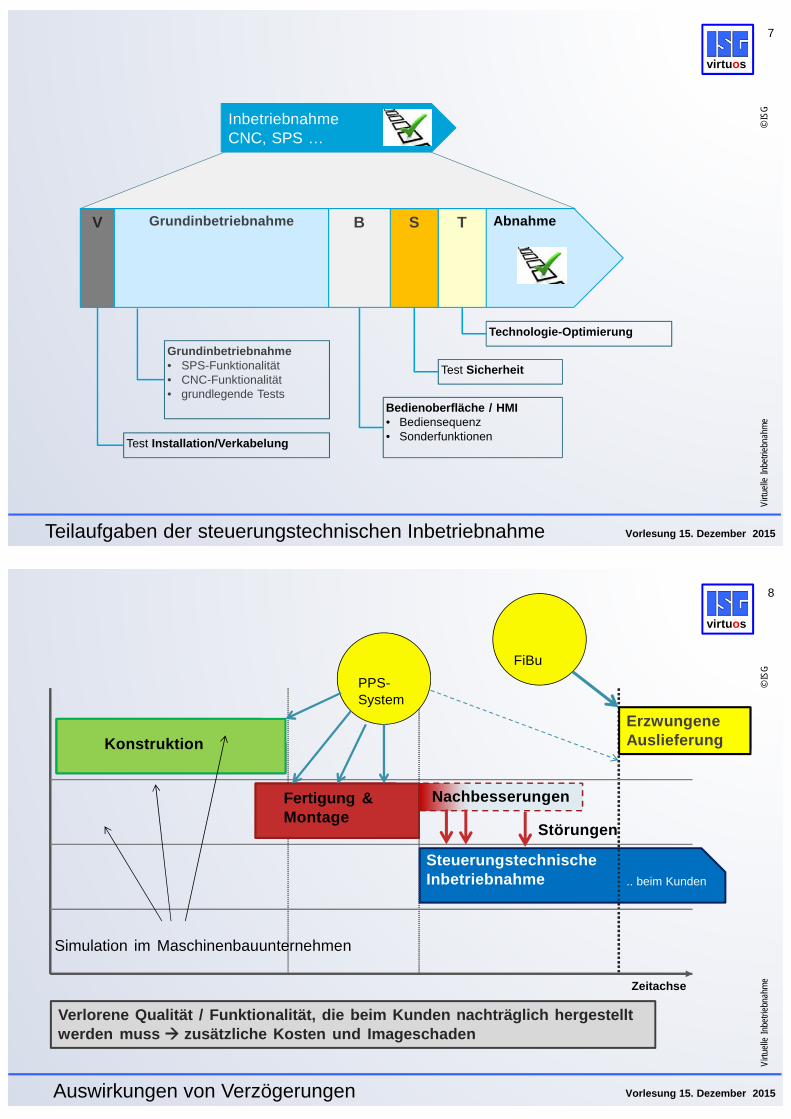
Üblicher sequentieller Workflow und seine Steuerung
Machine Design
Assembly
Steuerungstechnische Inbetriebnahme
Scheduleddelivery dateKonstruktion
Beschaffung & Montage
GeplanteAuslieferung
CAD FEM
MKS
Simulation im Maschinenbauunternehmen
Zeitachse
PPS-System
FiBu
Nachbesserungen
Störungen
Auslieferungsdatum unterliegt „betriebswirtschaftlichen“ Interessen Störungen werden nicht kalkuliert,Steuerungstechnische Inbetriebnahme entzieht sich der Kontrolle durch das PPS-System
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
6
Mechanik-Konstruktion
Konstruktions-zeichnungen
Elektro-Konstruktion
Software-Entwicklung
Stromlaufplan
ORGANIZATION_BLOCK ... TITLE = Hauptprogramm// 06.09.2004 User: XVERSION : 1.0
VAR_TEMPOB1_SCAN_1 : BYTE;...
SystematischeFunktionsbeschreibung
Empirische Funktionsbeschreibung
nicht verfügbar
Software (NC,SPS)
Ersatzweise Erstellung„Beschaffung von Informationen“
51% des Gesamtaufwandes EK
Mangelnder Informationsfluss in vielen Maschinebauunternehmen
Page 4
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
7
InbetriebnahmeCNC, SPS …
AbnahmeV Grundinbetriebnahme B S T
Test Installation/Verkabelung
Bedienoberfläche / HMI• Bediensequenz• Sonderfunktionen
Test Sicherheit
Technologie-Optimierung
Grundinbetriebnahme• SPS-Funktionalität• CNC-Funktionalität• grundlegende Tests
Teilaufgaben der steuerungstechnischen Inbetriebnahme
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
8
Auswirkungen von Verzögerungen
Machine Design
Assembly
Steuerungstechnische Inbetriebnahme
Scheduleddelivery dateKonstruktion
Fertigung & Montage
Erzwungene Auslieferung
Simulation im Maschinenbauunternehmen
Zeitachse
PPS-System
FiBu
Nachbesserungen
Störungen
.. beim Kunden
Verlorene Qualität / Funktionalität, die beim Kunden nachträglich hergestellt werden muss zusätzliche Kosten und Imageschaden
Page 5
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
9
Braucht man zur steuerungstechnischen Inbetriebnahme
die fertige Maschine?
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
10
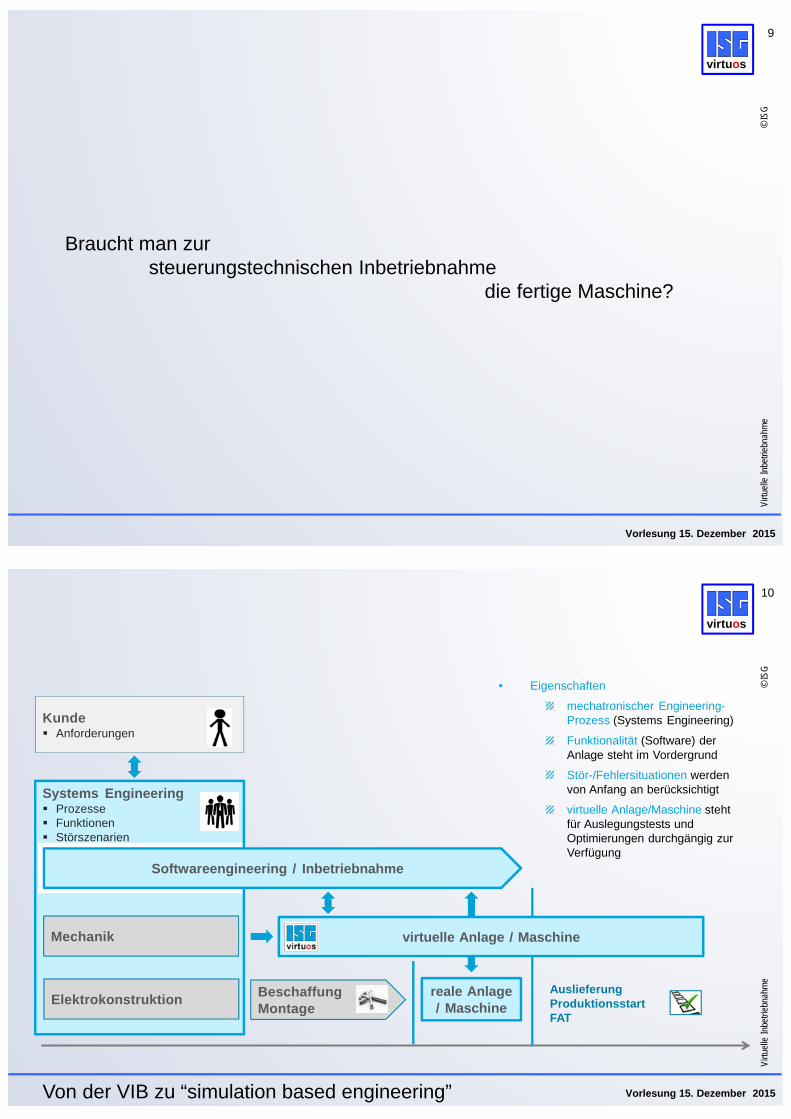
Systems Engineering Prozesse Funktionen Störszenarien
Kunde Anforderungen
Mechanik
ElektrokonstruktionBeschaffungMontage
• Eigenschaften
mechatronischer Engineering-Prozess (Systems Engineering)
Funktionalität (Software) der Anlage steht im Vordergrund
Stör-/Fehlersituationen werden von Anfang an berücksichtigt
virtuelle Anlage/Maschine steht für Auslegungstests und Optimierungen durchgängig zur Verfügung
Auslieferung ProduktionsstartFAT
reale Anlage / Maschine
virtuelle Anlage / Maschine
Softwareengineering / Inbetriebnahme
Von der VIB zu “simulation based engineering”
Page 6
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
11
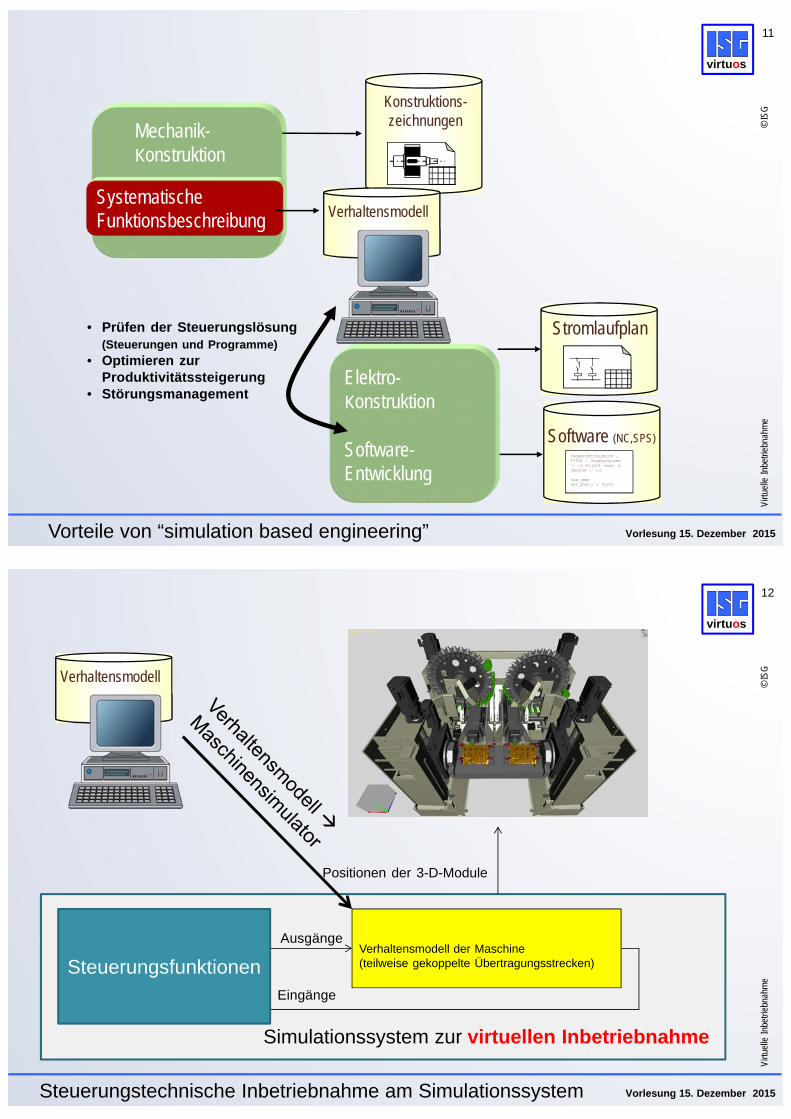
Konstruktions-zeichnungen
Elektro-Konstruktion
Software-Entwicklung
Stromlaufplan
Software (NC,SPS) ORGANIZATION_BLOCK ... TITLE = Hauptprogramm// 06.09.2004 User: XVERSION : 1.0
VAR_TEMPOB1_SCAN_1 : BYTE;...
SystematischeFunktionsbeschreibung
• Prüfen der Steuerungslösung(Steuerungen und Programme)
• Optimieren zur Produktivitätssteigerung
• Störungsmanagement
Mechanik-Konstruktion
Vorteile von “simulation based engineering”
Verhaltensmodell
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
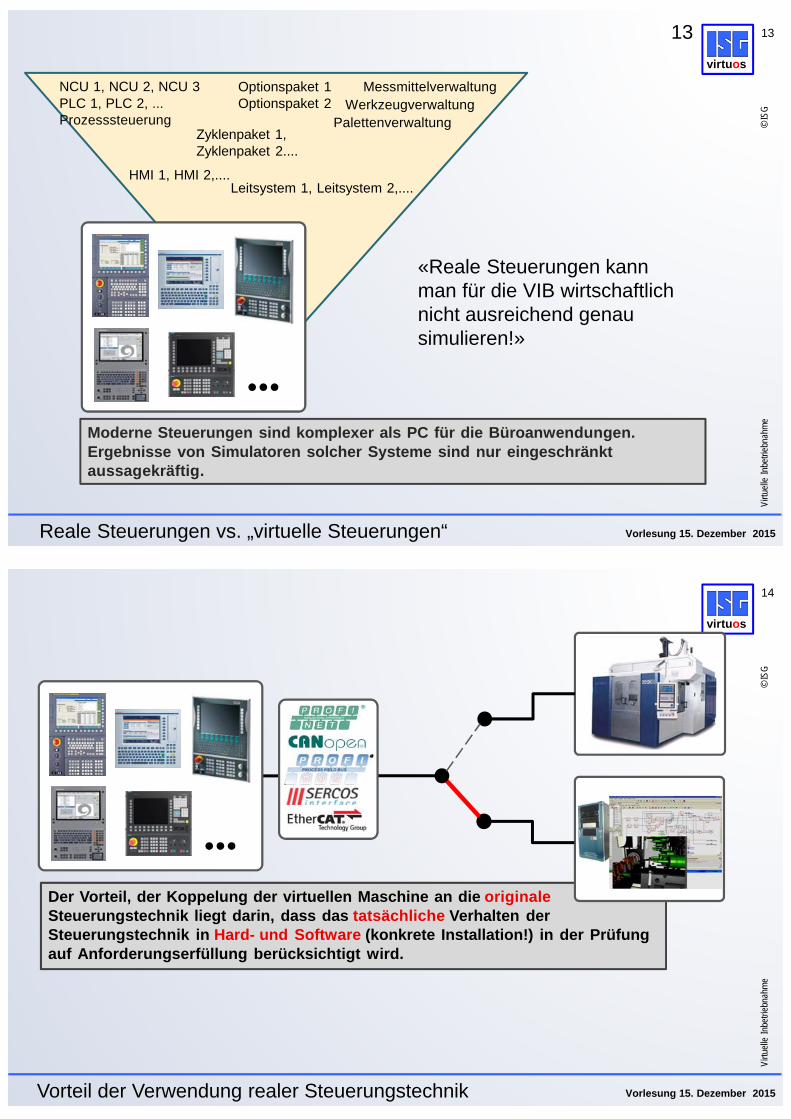
12
Verhaltensmodell der Maschine(teilweise gekoppelte Übertragungsstrecken)
Ausgänge
Eingänge
Positionen der 3-D-Module
Verhaltensmodell
Steuerungstechnische Inbetriebnahme am Simulationssystem
Steuerungsfunktionen
Simulationssystem zur virtuellen Inbetriebnahme
Page 7
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
1313
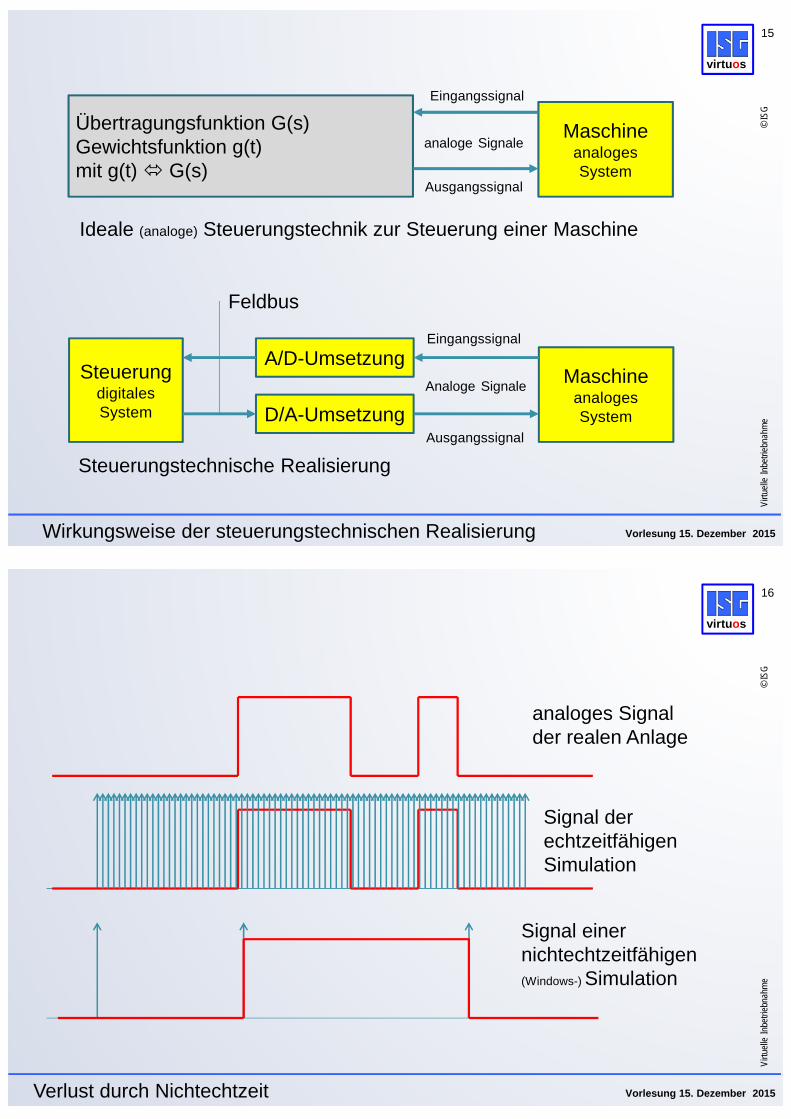
NCU 1, NCU 2, NCU 3PLC 1, PLC 2, ...Prozesssteuerung
Zyklenpaket 1,Zyklenpaket 2....
Optionspaket 1Optionspaket 2
HMI 1, HMI 2,....Leitsystem 1, Leitsystem 2,....
WerkzeugverwaltungPalettenverwaltung
Messmittelverwaltung
Reale Steuerungen vs. „virtuelle Steuerungen“
Moderne Steuerungen sind komplexer als PC für die Büroanwendungen. Ergebnisse von Simulatoren solcher Systeme sind nur eingeschränkt aussagekräftig.
«Reale Steuerungen kannman für die VIB wirtschaftlichnicht ausreichend genausimulieren!»
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
14
Der Vorteil, der Koppelung der virtuellen Maschine an die originaleSteuerungstechnik liegt darin, dass das tatsächliche Verhalten der Steuerungstechnik in Hard- und Software (konkrete Installation!) in der Prüfung auf Anforderungserfüllung berücksichtigt wird.
Vorteil der Verwendung realer Steuerungstechnik
Page 8
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
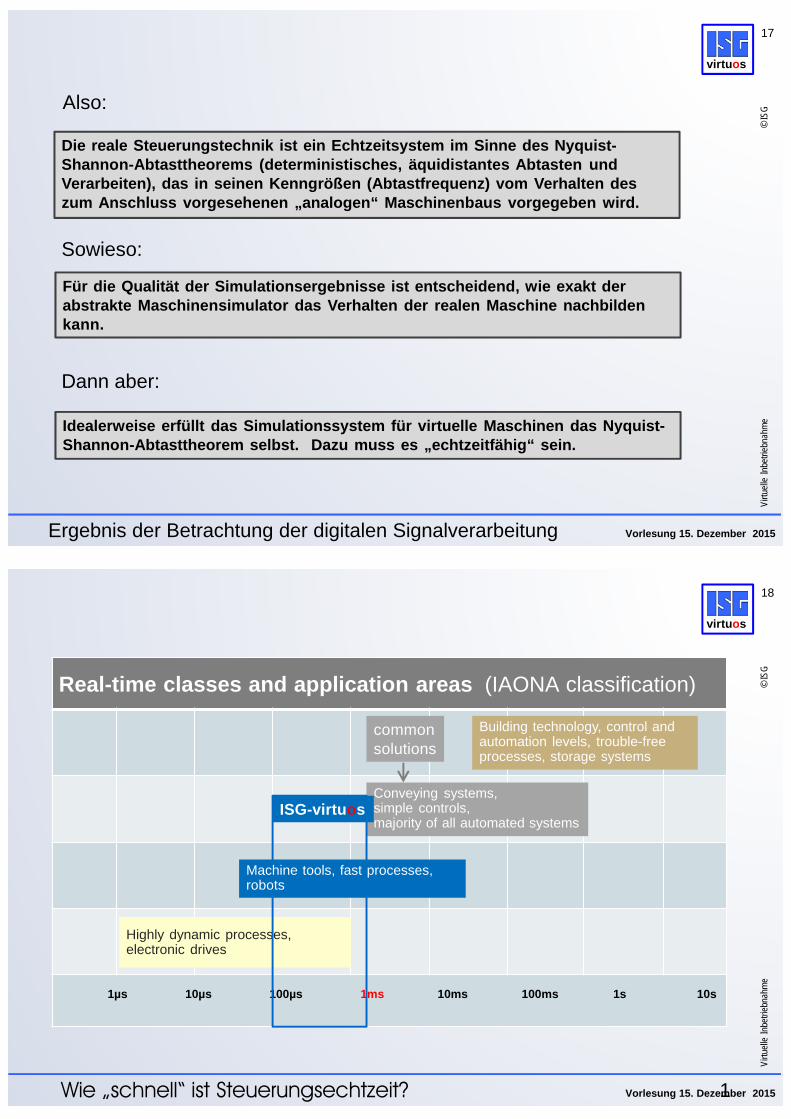
15
Steuerungdigitales System
Maschineanaloges System
A/D-Umsetzung
D/A-Umsetzung
Analoge Signale
Feldbus
Steuerungstechnische Realisierung
Übertragungsfunktion G(s)Gewichtsfunktion g(t)mit g(t) G(s)
Maschineanaloges System
Eingangssignal
Ausgangssignal
Ideale (analoge) Steuerungstechnik zur Steuerung einer Maschine
Ausgangssignal
Wirkungsweise der steuerungstechnischen Realisierung
analoge Signale
Eingangssignal
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
16
Verlust durch Nichtechtzeit
analoges Signalder realen Anlage
Signal derechtzeitfähigenSimulation
Signal einernichtechtzeitfähigen(Windows-) Simulation
Page 9
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
17
Die reale Steuerungstechnik ist ein Echtzeitsystem im Sinne des Nyquist-Shannon-Abtasttheorems (deterministisches, äquidistantes Abtasten und Verarbeiten), das in seinen Kenngrößen (Abtastfrequenz) vom Verhalten des zum Anschluss vorgesehenen „analogen“ Maschinenbaus vorgegeben wird.
Für die Qualität der Simulationsergebnisse ist entscheidend, wie exakt der abstrakte Maschinensimulator das Verhalten der realen Maschine nachbilden kann.
Idealerweise erfüllt das Simulationssystem für virtuelle Maschinen das Nyquist-Shannon-Abtasttheorem selbst. Dazu muss es „echtzeitfähig“ sein.
Also:
Dann aber:
Sowieso:
Ergebnis der Betrachtung der digitalen Signalverarbeitung
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
18
1Wie „schnell“ ist Steuerungsechtzeit?
Real-time classes and application areas (IAONA classification)
1µs 10µs 100µs 1ms 10ms 100ms 1s 10s
Highly dynamic processes, electronic drives
Conveying systems,simple controls,majority of all automated systems
Building technology, control and automation levels, trouble-free processes, storage systems
commonsolutions
ISG-virtuos
Machine tools, fast processes, robots
Page 10
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
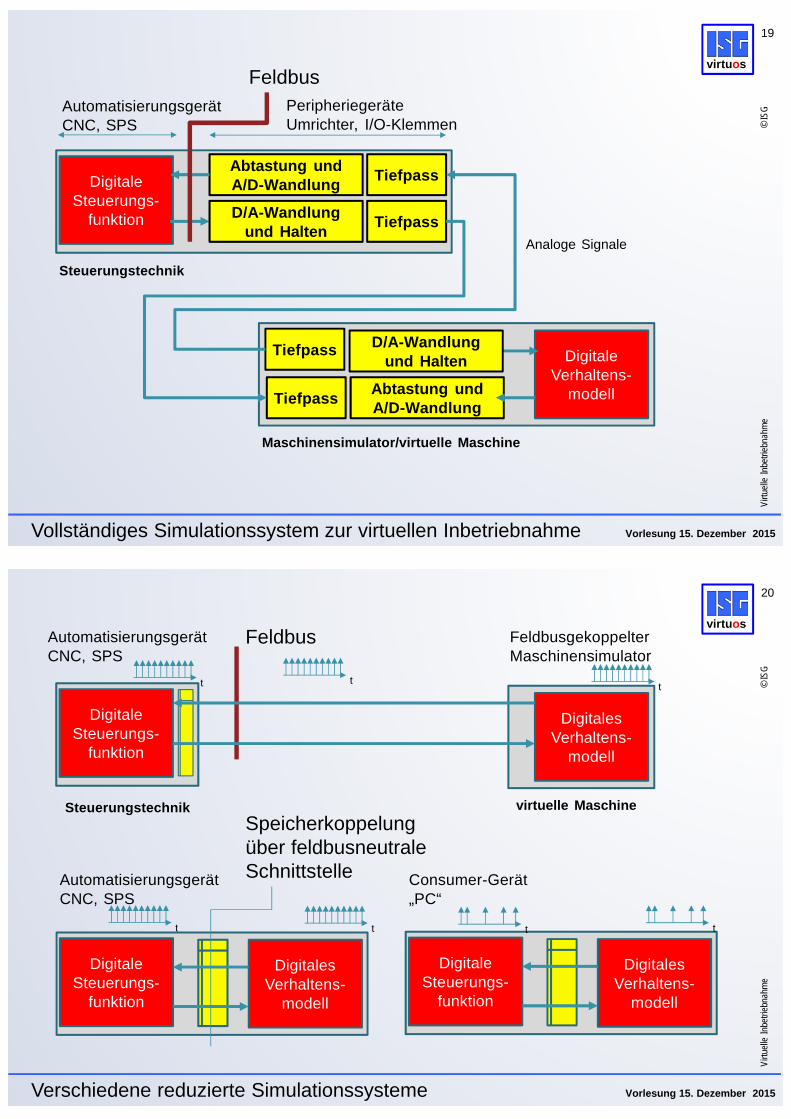
19
Analoge Signale
Steuerungstechnik
Vollständiges Simulationssystem zur virtuellen Inbetriebnahme
Tiefpass
Tiefpass
Abtastung und A/D-WandlungDigitale
Steuerungs-funktion D/A-Wandlung
und Halten
Tiefpass
TiefpassAbtastung und A/D-Wandlung
Digitale Verhaltens-
modell
D/A-Wandlung und Halten
Maschinensimulator/virtuelle Maschine
FeldbusAutomatisierungsgerätCNC, SPS
PeripheriegeräteUmrichter, I/O-Klemmen
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
20
Steuerungstechnik
Verschiedene reduzierte Simulationssysteme
Digitale Steuerungs-
funktion
Digitales Verhaltens-
modell
virtuelle Maschine
FeldbusAutomatisierungsgerätCNC, SPS
Feldbusgekoppelter Maschinensimulator
Digitale Steuerungs-
funktion
Digitales Verhaltens-
modell
Speicherkoppelung über feldbusneutrale SchnittstelleAutomatisierungsgerät
CNC, SPS
Digitale Steuerungs-
funktion
Digitales Verhaltens-
modell
Consumer-Gerät„PC“
t
t t
t t
t t
Page 11
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
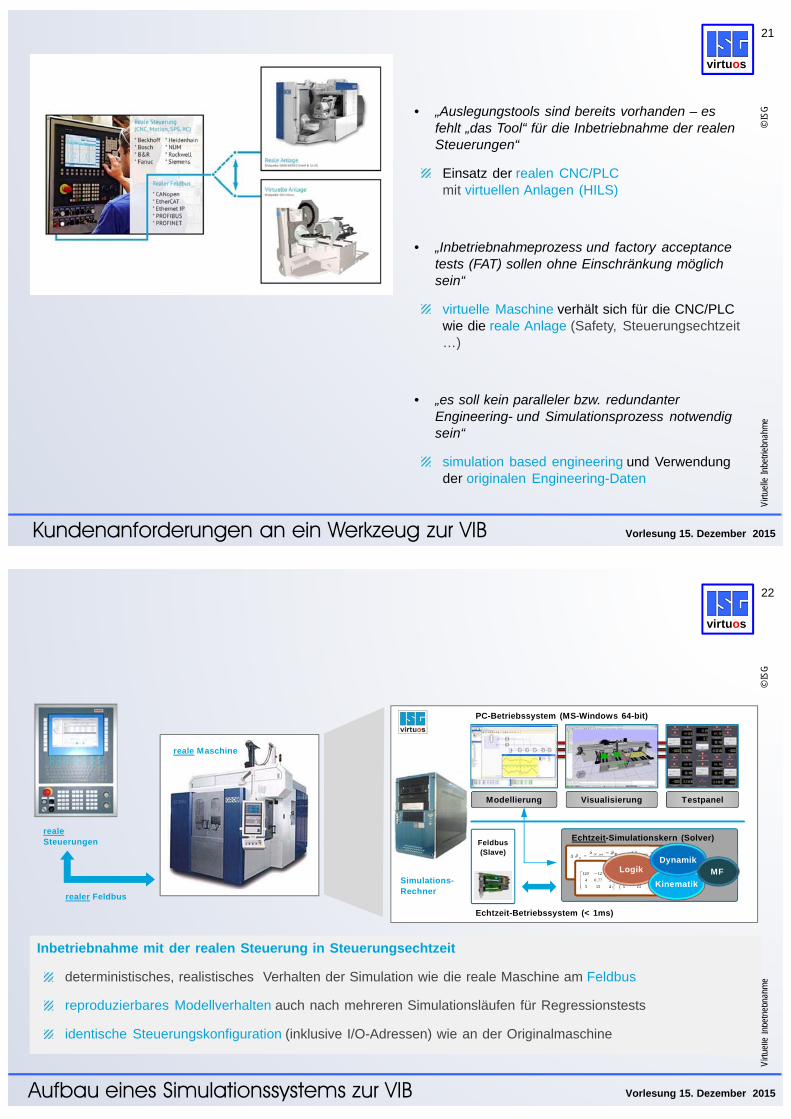
21
• „Auslegungstools sind bereits vorhanden – es fehlt „das Tool“ für die Inbetriebnahme der realen Steuerungen“
Einsatz der realen CNC/PLCmit virtuellen Anlagen (HILS)
• „Inbetriebnahmeprozess und factory acceptance tests (FAT) sollen ohne Einschränkung möglich sein“
virtuelle Maschine verhält sich für die CNC/PLC wie die reale Anlage (Safety, Steuerungsechtzeit …)
• „es soll kein paralleler bzw. redundanter Engineering- und Simulationsprozess notwendig sein“
simulation based engineering und Verwendung der originalen Engineering-Daten
Kundenanforderungen an ein Werkzeug zur VIB
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
22
Aufbau eines Simulationssystems zur VIB
Inbetriebnahme mit der realen Steuerung in Steuerungsechtzeit
deterministisches, realistisches Verhalten der Simulation wie die reale Maschine am Feldbus
reproduzierbares Modellverhalten auch nach mehreren Simulationsläufen für Regressionstests
identische Steuerungskonfiguration (inklusive I/O-Adressen) wie an der Originalmaschine
realer Feldbus
realeSteuerungen
Simulations-Rechner
)ln(
)(
,,
,,
,,,,
einWausÖl
ausWeinÖl
einWausÖlausWeinÖlm
4155
577.04
4512120
4155
44498.045
55185.121
4155
577.04
4512120Logik
Kinematik
Dynamik
MF
Echtzeit-Simulationskern (Solver)
Echtzeit-Betriebssystem (< 1ms)
Feldbus(Slave)
Testpanel
PC-Betriebssystem (MS-Windows 64-bit)
VisualisierungModellierung
reale Maschine
Page 12
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
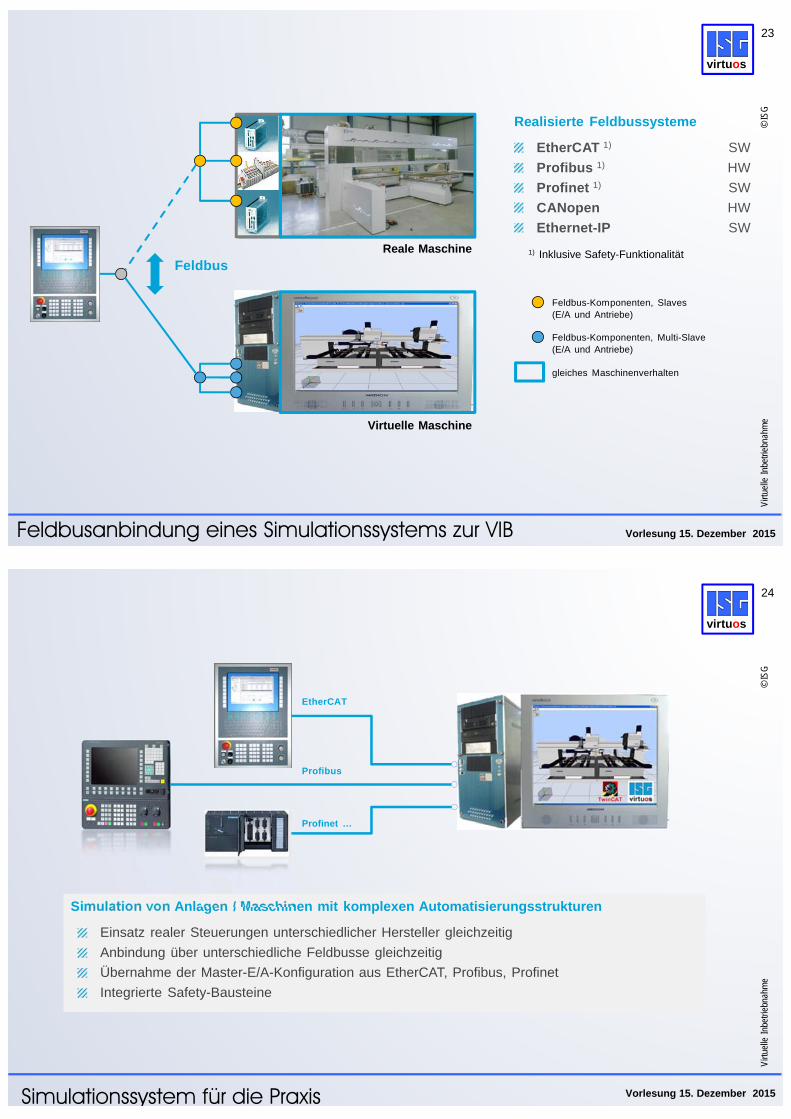
23
Feldbusanbindung eines Simulationssystems zur VIB
Realisierte Feldbussysteme
EtherCAT 1) SW
Profibus 1) HW
Profinet 1) SW
CANopen HW
Ethernet-IP SW
1) Inklusive Safety-FunktionalitätReale Maschine
Virtuelle Maschine
Feldbus-Komponenten, Slaves(E/A und Antriebe)
Feldbus-Komponenten, Multi-Slave (E/A und Antriebe)
gleiches Maschinenverhalten
Feldbus
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
24
Simulationssystem für die Praxis
Simulation von Anlagen / Maschinen mit komplexen Automatisierungsstrukturen
Einsatz realer Steuerungen unterschiedlicher Hersteller gleichzeitig
Anbindung über unterschiedliche Feldbusse gleichzeitig
Übernahme der Master-E/A-Konfiguration aus EtherCAT, Profibus, Profinet
Integrierte Safety-Bausteine
EtherCAT
Profibus
Profinet …
Page 13
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
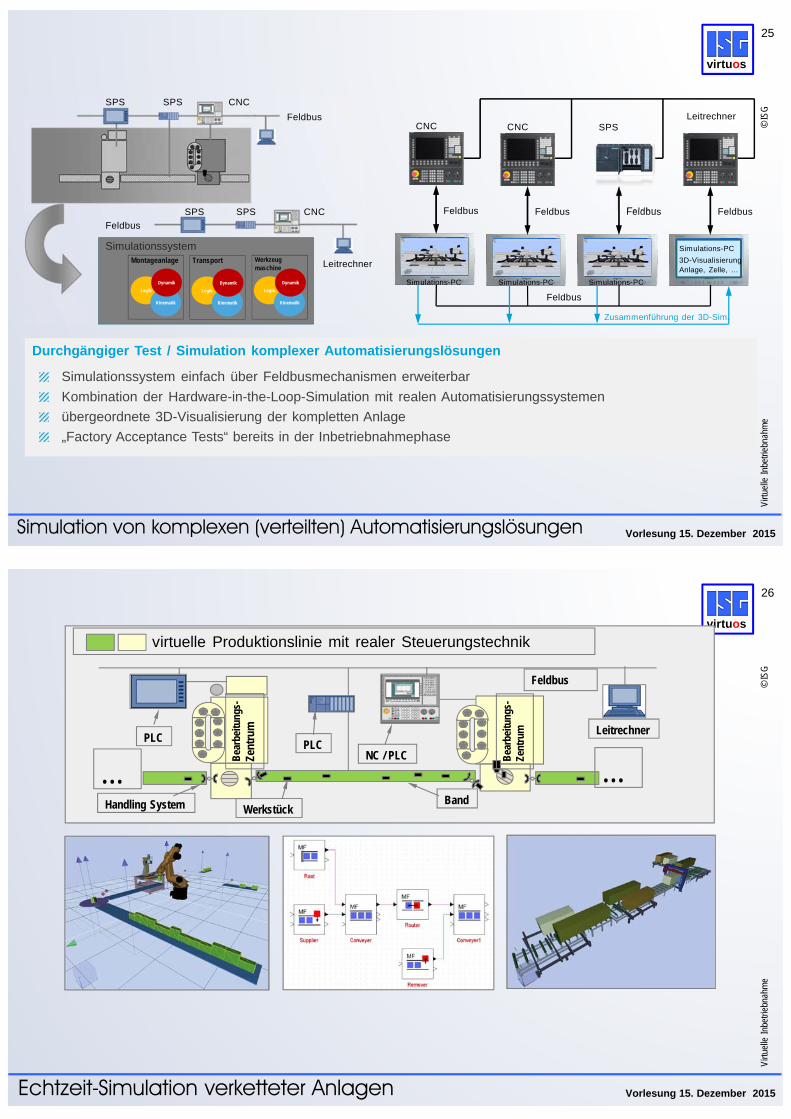
25
Simulation von komplexen (verteilten) Automatisierungslösungen
Durchgängiger Test / Simulation komplexer Automatisierungslösungen
Simulationssystem einfach über Feldbusmechanismen erweiterbar
Kombination der Hardware-in-the-Loop-Simulation mit realen Automatisierungssystemen
übergeordnete 3D-Visualisierung der kompletten Anlage
„Factory Acceptance Tests“ bereits in der Inbetriebnahmephase
Simulations-PC
Feldbus
CNC
Simulations-PC
Feldbus
CNC
Simulations-PC
Feldbus
SPS
Feldbus
Leitrechner
Feldbus
Simulations-PC
3D-VisualisierungAnlage, Zelle, …
SPS SPS CNC
Feldbus
Feldbus
SPS SPS CNC
Leitrechner
SimulationssystemMontageanlage
Logik
Kinematik
Dynamik
Transport
Logik
Kinematik
Dynamik
Werkzeugmaschine
Logik
Kinematik
Dynamik
Zusammenführung der 3D-Sim.
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
26
Echtzeit-Simulation verketteter Anlagen
Bea
rbei
tung
s-Ze
ntru
m
Bea
rbei
tung
s-Ze
ntru
m
WerkstückBandHandling System
Feldbus
LeitrechnerPLC
NC / PLC
……PLC
virtuelle Produktionslinie mit realer Steuerungstechnik
Page 14
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
27
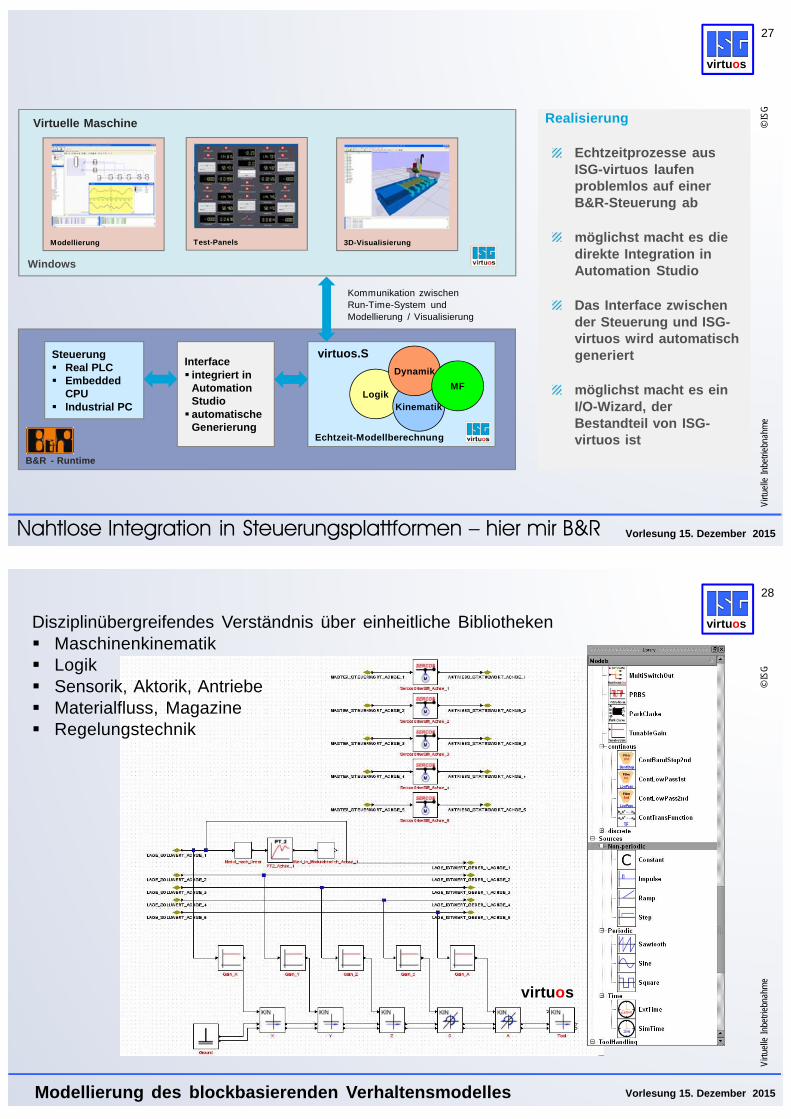
Nahtlose Integration in Steuerungsplattformen – hier mir B&R
B&R - Runtime
virtuos.SInterface integriert in
Automation Studio automatische
Generierung
Virtuelle Maschine
Echtzeit-Modellberechnung
LogikKinematik
Dynamik
virtuos.SSteuerung Real PLC Embedded
CPU Industrial PC
MF
Modellierung Test-Panels 3D-Visualisierung
Windows
Realisierung
Echtzeitprozesse aus ISG-virtuos laufen problemlos auf einer B&R-Steuerung ab
möglichst macht es die direkte Integration in Automation Studio
Das Interface zwischen der Steuerung und ISG-virtuos wird automatisch generiert
möglichst macht es einI/O-Wizard, der Bestandteil von ISG-virtuos ist
Kommunikation zwischen Run-Time-System undModellierung / Visualisierung
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
28
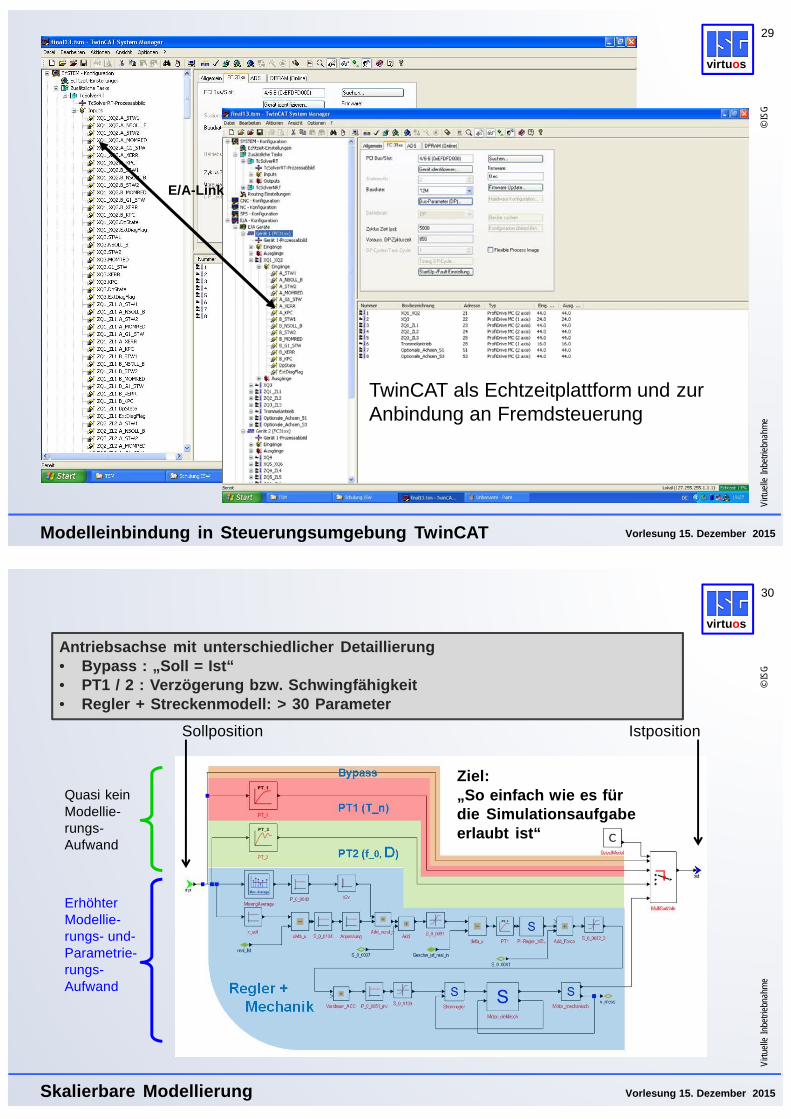
Disziplinübergreifendes Verständnis über einheitliche Bibliotheken Maschinenkinematik Logik Sensorik, Aktorik, Antriebe Materialfluss, Magazine Regelungstechnik
virtuos
Modellierung des blockbasierenden Verhaltensmodelles
Page 15
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
29
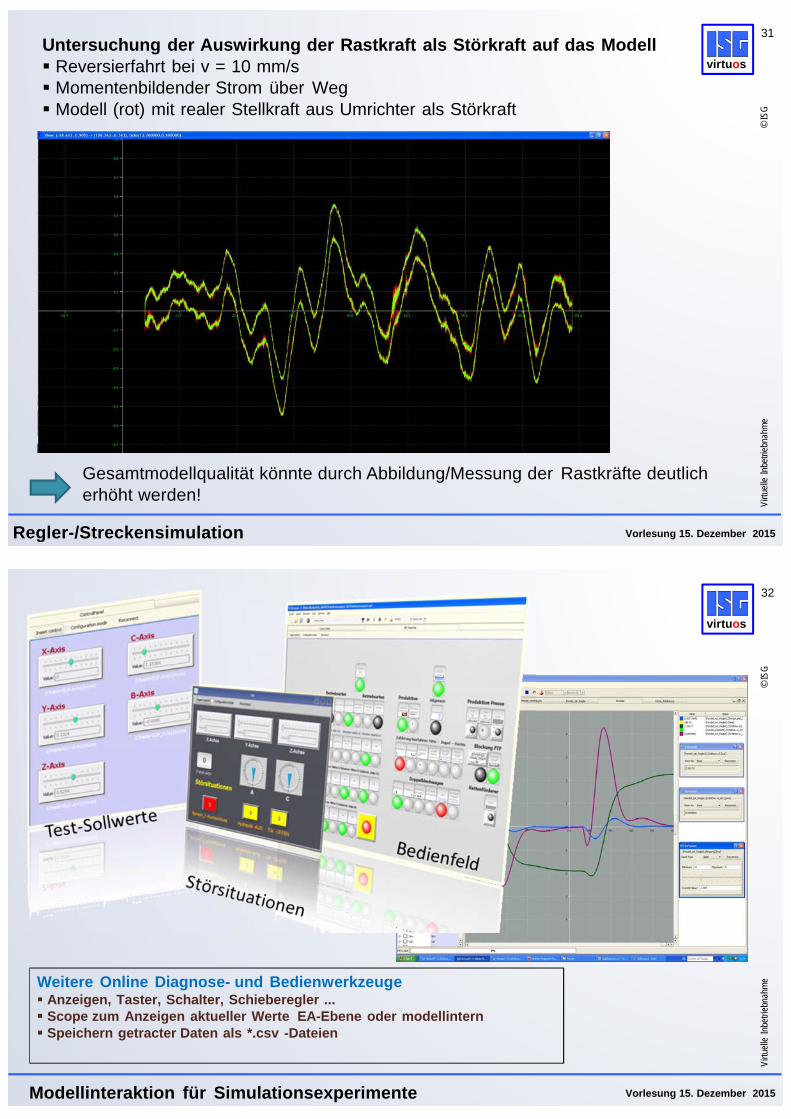
E/A-Link
Modelleinbindung in Steuerungsumgebung TwinCAT
TwinCAT als Echtzeitplattform und zurAnbindung an Fremdsteuerung
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
30
Skalierbare Modellierung
IstpositionSollposition
Quasi kein Modellie-rungs-Aufwand
Erhöhter Modellie-rungs- und-Parametrie-rungs-Aufwand
Ziel: „So einfach wie es für die Simulationsaufgabe erlaubt ist“
Antriebsachse mit unterschiedlicher Detaillierung• Bypass : „Soll = Ist“• PT1 / 2 : Verzögerung bzw. Schwingfähigkeit• Regler + Streckenmodell: > 30 Parameter
Page 16
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
31
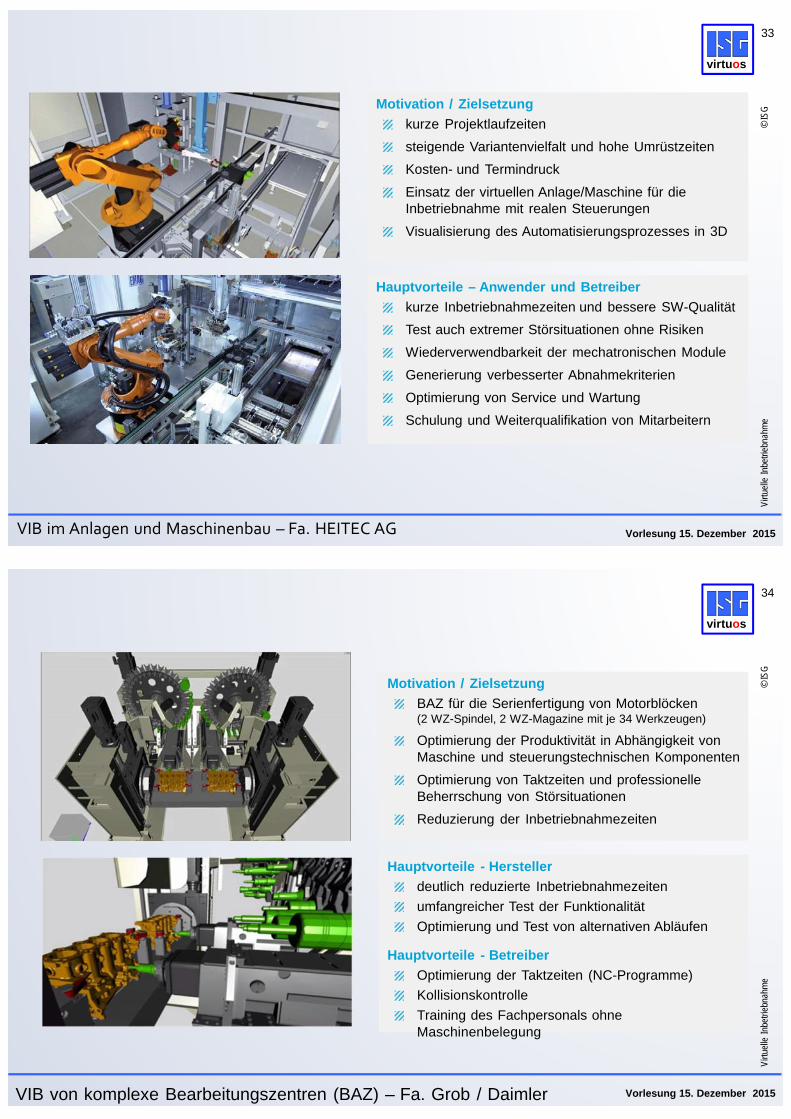
Regler-/Streckensimulation
Untersuchung der Auswirkung der Rastkraft als Störkraft auf das Modell Reversierfahrt bei v = 10 mm/s Momentenbildender Strom über Weg Modell (rot) mit realer Stellkraft aus Umrichter als Störkraft
Gesamtmodellqualität könnte durch Abbildung/Messung der Rastkräfte deutlicherhöht werden!
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
32
Weitere Online Diagnose- und Bedienwerkzeuge Anzeigen, Taster, Schalter, Schieberegler ... Scope zum Anzeigen aktueller Werte EA-Ebene oder modellintern Speichern getracter Daten als *.csv -Dateien
Modellinteraktion für Simulationsexperimente
Page 17
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
33
VIB im Anlagen und Maschinenbau – Fa. HEITEC AG
Motivation / Zielsetzung
kurze Projektlaufzeiten
steigende Variantenvielfalt und hohe Umrüstzeiten
Kosten- und Termindruck
Einsatz der virtuellen Anlage/Maschine für die Inbetriebnahme mit realen Steuerungen
Visualisierung des Automatisierungsprozesses in 3D
Hauptvorteile – Anwender und Betreiber
kurze Inbetriebnahmezeiten und bessere SW-Qualität
Test auch extremer Störsituationen ohne Risiken
Wiederverwendbarkeit der mechatronischen Module
Generierung verbesserter Abnahmekriterien
Optimierung von Service und Wartung
Schulung und Weiterqualifikation von Mitarbeitern
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
34
VIB von komplexe Bearbeitungszentren (BAZ) – Fa. Grob / Daimler
Motivation / Zielsetzung
BAZ für die Serienfertigung von Motorblöcken (2 WZ-Spindel, 2 WZ-Magazine mit je 34 Werkzeugen)
Optimierung der Produktivität in Abhängigkeit von Maschine und steuerungstechnischen Komponenten
Optimierung von Taktzeiten und professionelle Beherrschung von Störsituationen
Reduzierung der Inbetriebnahmezeiten
Hauptvorteile - Hersteller
deutlich reduzierte Inbetriebnahmezeiten
umfangreicher Test der Funktionalität
Optimierung und Test von alternativen Abläufen
Hauptvorteile - Betreiber
Optimierung der Taktzeiten (NC-Programme)
Kollisionskontrolle
Training des Fachpersonals ohne Maschinenbelegung
Page 18
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
35
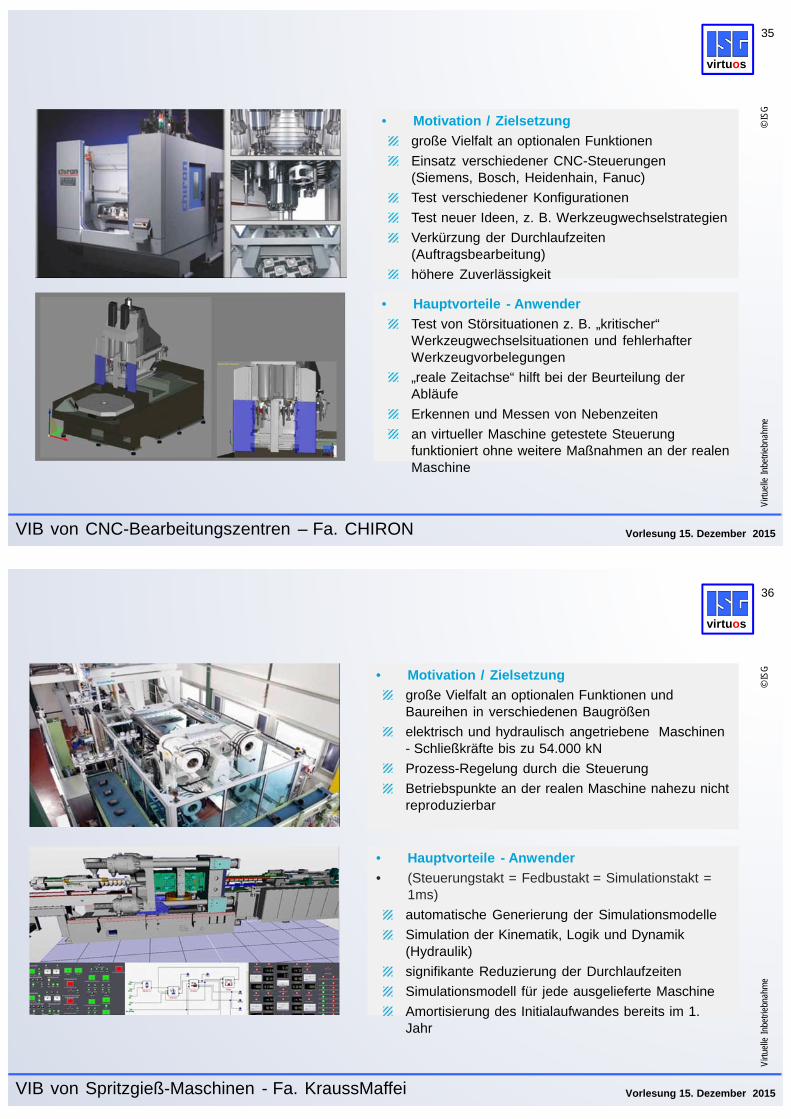
VIB von CNC-Bearbeitungszentren – Fa. CHIRON
• Motivation / Zielsetzung
große Vielfalt an optionalen Funktionen
Einsatz verschiedener CNC-Steuerungen(Siemens, Bosch, Heidenhain, Fanuc)
Test verschiedener Konfigurationen
Test neuer Ideen, z. B. Werkzeugwechselstrategien
Verkürzung der Durchlaufzeiten (Auftragsbearbeitung)
höhere Zuverlässigkeit
- Taktzeitoptimierung• Hauptvorteile - Anwender
Test von Störsituationen z. B. „kritischer“ Werkzeugwechselsituationen und fehlerhafter Werkzeugvorbelegungen
„reale Zeitachse“ hilft bei der Beurteilung der Abläufe
Erkennen und Messen von Nebenzeiten
an virtueller Maschine getestete Steuerung funktioniert ohne weitere Maßnahmen an der realen Maschine
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
36
VIB von Spritzgieß-Maschinen - Fa. KraussMaffei
• Motivation / Zielsetzung
große Vielfalt an optionalen Funktionen und Baureihen in verschiedenen Baugrößen
elektrisch und hydraulisch angetriebene Maschinen - Schließkräfte bis zu 54.000 kN
Prozess-Regelung durch die Steuerung
Betriebspunkte an der realen Maschine nahezu nicht reproduzierbar
• Hauptvorteile - Anwender
• (Steuerungstakt = Fedbustakt = Simulationstakt = 1ms)
automatische Generierung der Simulationsmodelle
Simulation der Kinematik, Logik und Dynamik (Hydraulik)
signifikante Reduzierung der Durchlaufzeiten
Simulationsmodell für jede ausgelieferte Maschine
Amortisierung des Initialaufwandes bereits im 1. Jahr
Page 19
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
37
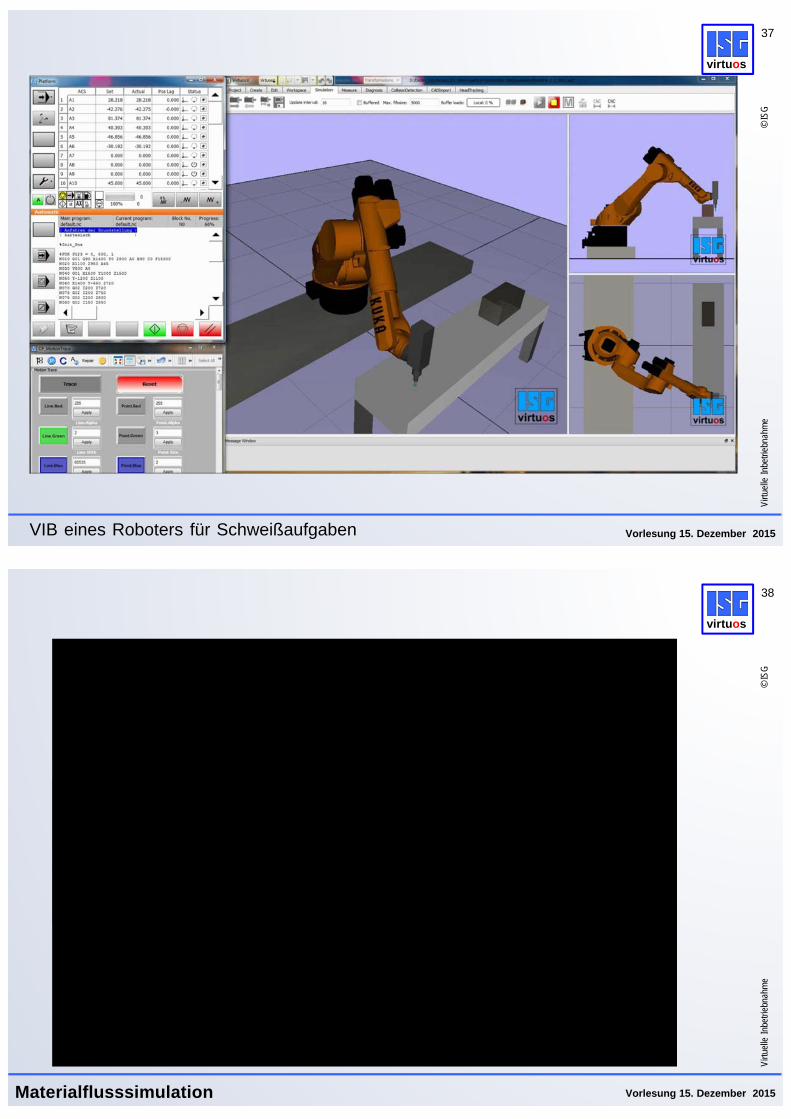
VIB eines Roboters für Schweißaufgaben
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
38
Materialflusssimulation
Page 20
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
39
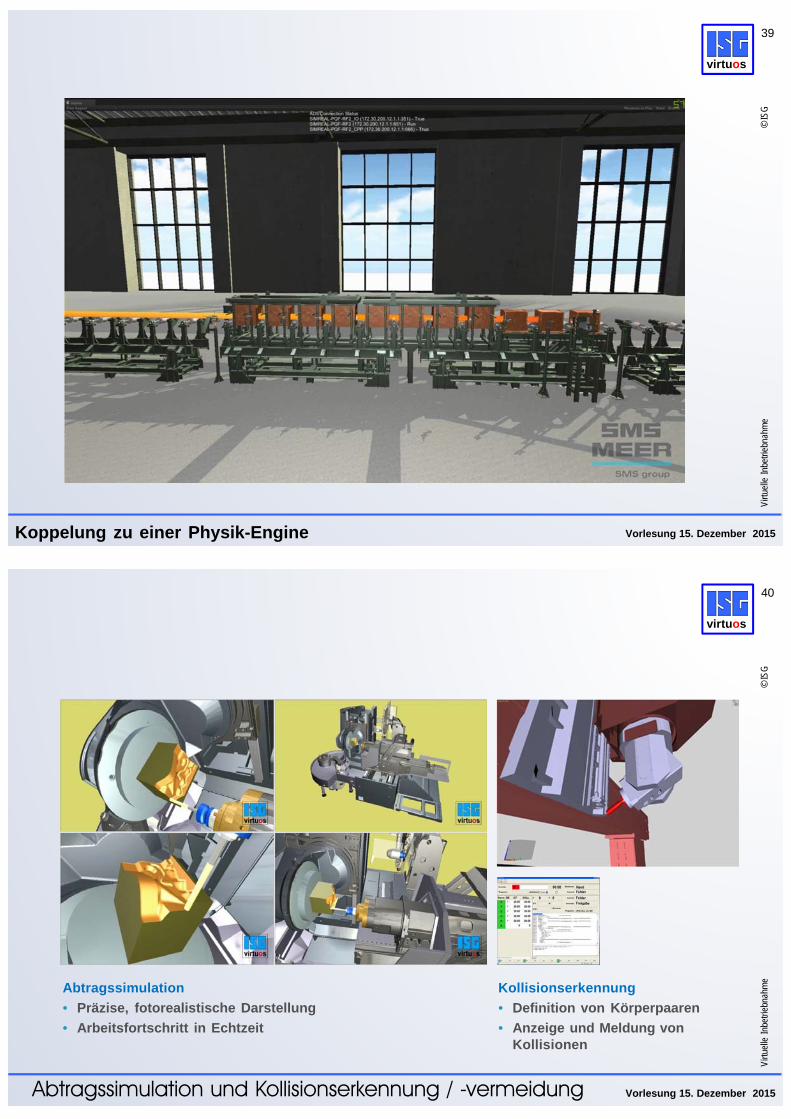
Koppelung zu einer Physik-Engine
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
40
Abtragssimulation und Kollisionserkennung / -vermeidung
Abtragssimulation
• Präzise, fotorealistische Darstellung
• Arbeitsfortschritt in Echtzeit
Kollisionserkennung
• Definition von Körperpaaren
• Anzeige und Meldung von Kollisionen
Page 21
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
41
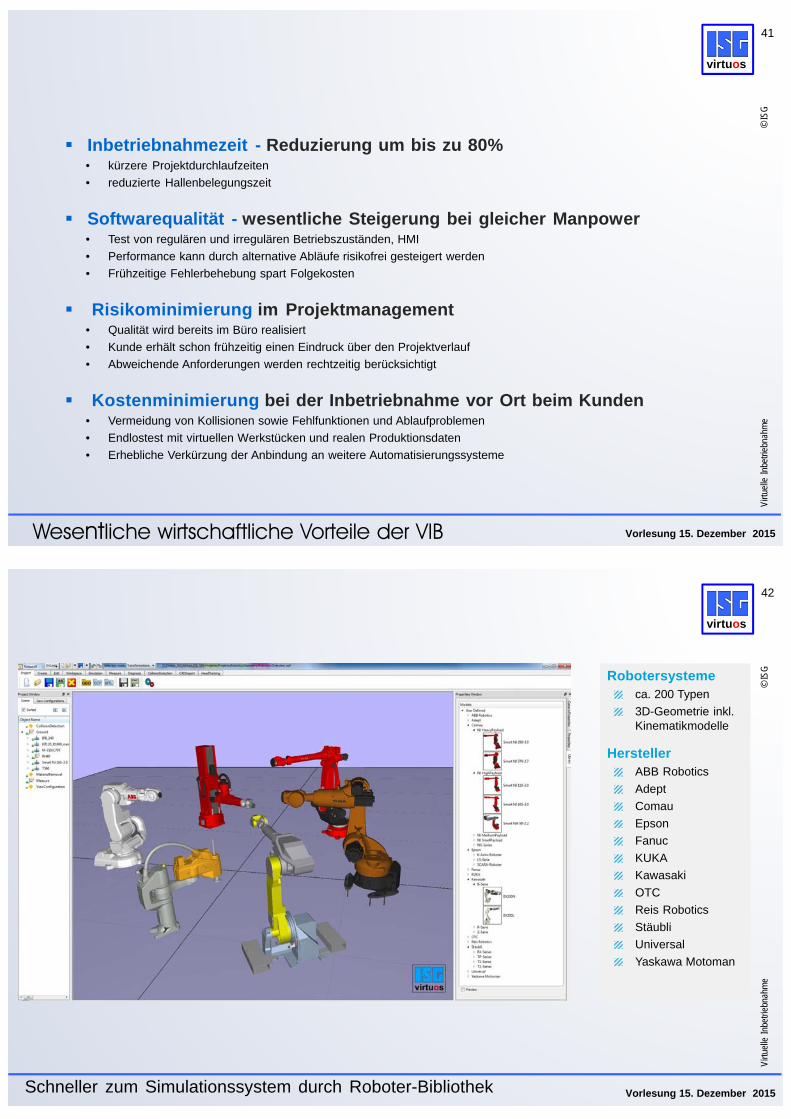
Wesentliche wirtschaftliche Vorteile der VIB
Inbetriebnahmezeit - Reduzierung um bis zu 80%• kürzere Projektdurchlaufzeiten
• reduzierte Hallenbelegungszeit
Softwarequalität - wesentliche Steigerung bei gleicher Manpower• Test von regulären und irregulären Betriebszuständen, HMI
• Performance kann durch alternative Abläufe risikofrei gesteigert werden
• Frühzeitige Fehlerbehebung spart Folgekosten
Risikominimierung im Projektmanagement• Qualität wird bereits im Büro realisiert
• Kunde erhält schon frühzeitig einen Eindruck über den Projektverlauf
• Abweichende Anforderungen werden rechtzeitig berücksichtigt
Kostenminimierung bei der Inbetriebnahme vor Ort beim Kunden• Vermeidung von Kollisionen sowie Fehlfunktionen und Ablaufproblemen
• Endlostest mit virtuellen Werkstücken und realen Produktionsdaten
• Erhebliche Verkürzung der Anbindung an weitere Automatisierungssysteme
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
42
Schneller zum Simulationssystem durch Roboter-Bibliothek
Robotersystemeca. 200 Typen
3D-Geometrie inkl. Kinematikmodelle
HerstellerABB Robotics
Adept
Comau
Epson
Fanuc
KUKA
Kawasaki
OTC
Reis Robotics
Stäubli
Universal
Yaskawa Motoman
Page 22
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
43
VIB in Steuerungsechtzeit
Vorlesung 15. Dezember 2015
Virt
uelle
Inb
etrie
bnah
me
© IS
G
virtuos
44
Vielen Dank für Ihre Aufmerksamkeit!
www.isg-stuttgart.de
Studienarbeiten in Zusammenarbeit mit Instituten
HiWi-Arbeitspätze
Industriepraktika