Lehrstuhl für Fördertechnik Materialfluss Logistik der Technischen Universität München Technische Konzepte zur RFID-gestützten Bauzustandsdokumentation in der Automobilindustrie Jürgen Wagner Vollständiger Abdruck der von der Fakultät für Maschinenwesen der Technischen Universität München zur Erlangung des akademischen Grades eines Doktor-Ingenieurs (Dr.-Ing.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr.-Ing. B.-R. Höhn Prüfer der Dissertation: 1. Univ.-Prof. Dr.-Ing. W. A. Günthner 2. Univ.-Prof. Dr.-Ing. B. Heißing Die Dissertation wurde am 26.05.2009 bei der Technischen Universität München eingereicht und durch die Fakultät für Maschinenwesen am 26.10.2009 angenommen.
Transcript
Lehrstuhl für
Fördertechnik Materialfluss Logistik
der Technischen Universität München
Technische Konzepte zur RFID-gestützten
Bauzustandsdokumentation in der Automobilindustrie
Jürgen Wagner
Vollständiger Abdruck der von der Fakultät für Maschinenwesen der Technischen Universität
München zur Erlangung des akademischen Grades eines
Doktor-Ingenieurs (Dr.-Ing.)
genehmigten Dissertation.
Vorsitzender:
Univ.-Prof. Dr.-Ing. B.-R. Höhn
Prüfer der Dissertation:
1. Univ.-Prof. Dr.-Ing. W. A. Günthner
2. Univ.-Prof. Dr.-Ing. B. Heißing
Die Dissertation wurde am 26.05.2009 bei der Technischen Universität München eingereicht
und durch die Fakultät für Maschinenwesen am 26.10.2009 angenommen.
Vorwort
I
Vorwort
Die vorliegende Arbeit entstand während meiner Tätigkeit als wissenschaftlicher Mit-
arbeiter am Lehrstuhl für Fördertechnik Materialfluss Logistik (fml) der Technischen
Universität München in Zusammenarbeit mit der AUDI AG über die Ingolstadt Institu-
te der TU München (INI.TUM).
Mein persönlicher Dank gilt in erster Linie Herrn Prof. Dr. W. A. Günthner, der mir die
Möglichkeit zur Durchführung meiner Forschungstätigkeit gab sowie mir das notwen-
dige Vertrauen und die notwendige Unterstützung entgegenbrachte. Zudem danke
ich Herrn Prof. Heißing für die Übernahme des Korreferats und Herrn Prof. Höhn für
den Vorsitz der Prüfungskommission. Mein besonderer Dank gilt auch Herrn Stefan
Härdl, Herrn Dr. Peter Tropschuh, Herrn Arne Leetz und Herrn Dr. Uwe Koser sowie
allen Arbeitskollegen in der Fachabteilung ET-2 der AUDI AG, die mich als Auftrag-
geber und Ansprechpartner des INI.TUM Wissenschaftsprojektes „Transparenter
Prototyp“ mit vollen Kräften unterstützt und gefördert haben.
Ebenso möchte ich mich bei allen Mitarbeiterinnen und Mitarbeitern des Lehrstuhls
fml für die sehr gute und freundschaftliche Zusammenarbeit bedanken. Namentlich
möchte ich meine Kollegen Julia Boppert, Janina Durchholz, Roland Fischer, Michael
Salfer, Stefan Sanladerer und Michael Schedlbauer erwähnen, die mir immer zur
Seite gestanden haben. Des Weiteren gilt mein Dank meinem früheren Kollegen Ste-
fan Seemüller, der mich an den Lehrstuhl herangeführt hat.
Mein größter Dank gilt meiner Familie, insbesondere meiner Mutter und meinem
Stiefvater, für die langjährige und unbegrenzte Unterstützung in allen Bereichen mei-
nes Lebens, wodurch es mir ermöglicht wurde, diesen wichtigen Schritt in meinem
beruflichen Werdegang abzuschließen.
Von ganzen Herzen bedanke ich mich bei meiner Freundin Melanie Veicht, die im-
mer verständnisvoll war und mir mit ihrer Liebe kontinuierlich neue Kraft, Inspiration
und Energie zur Durchführung meiner Dissertation gegeben hat.
Garching, im Mai 2009 Jürgen Wagner
II
Kurzzusammenfassung
III
Kurzzusammenfassung
Zur Sicherstellung der Qualität über alle Wertschöpfungsstufen und beteiligten Un-
ternehmen im vielschichtigen Entwicklung- und Produktionsprozess der Automobilin-
dustrie bedarf es eines konsequenten Qualitätsmanagements. Eine zentrale Rolle
zur Schaffung von Transparenz nimmt hierbei die lückenlose Verfolgung und Doku-
mentation des Bauzustandes von Fahrzeugen ein.
Die Radiofrequenzidentifikation, die eine Methode kennzeichnet bei der Daten mittels
magnetischer Felder bzw. elektromagnetischer Wellen über die Luftschnittstelle über-
tragen werden, schafft hier neue Chancen und Potenziale zur Steigerung der Effi-
zienz und Transparenz in der Wertschöpfungskette durch die durchgängige und
eindeutige Identifizierung von Fahrzeugkomponenten.
Die Kennzeichnung und Erfassung von Fahrzeugeinzelteilen - insbesondere im Fahr-
zeug - ist aber aufgrund der negativen Auswirkungen von Metall auf die Leistungsfä-
higkeit von RFID-Systemen mit vielschichtigen Herausforderungen behaftet und nicht
mit einem auf dem Markt erhältlichem Standardsystem lösbar.
Das Ziel der Arbeit war daher die Entwicklung von technischen Konzepten zur Kenn-
zeichnung und Erfassung von verbauten Bauteilen im Fahrzeug mit Hilfe der RFID-
Technologie sowie der Nachweis der technischen Machbarkeit einer RFID-gestützten
Bauzustandsdokumentation.
Dazu wurde ein Konzept zur Entkopplung der mobilen Datenträger von leitfähigen
Materialien mittels eines Spezialabsorbers erarbeitet, um die für den Anwendungsfall
essenzielle Kennzeichnung von metallischen Bauteilen unter den spezifischen An-
forderungen zu ermöglichen.
Zur Erfassung gekennzeichneter Bauteile im Fahrzeug wurden verschiedene techni-
sche Antennenkonzepte betrachtet beziehungsweise entwickelt und auf deren Eig-
nung für den Einsatz in der RFID-gestützten Bauzustandsdokumentation überprüft.
Durch die gezielte Kombination von zwei Antennenkonzepten konnte im Rahmen
einer praktischen Evaluierung an Hand eines repräsentativen Versuchsfahrzeug ge-
zeigt werden, dass die RFID-Technologie die Möglichkeit bietet Fahrzeugbauteile zu
kennzeichnen und im verbauten Zustand zu erfassen.
Summary
IV
Summary
To ensure the quality in the supply chain integrating all involved companies within the
automobile industry’s complex development and production process requires a con-
sistent quality management For creating transparency a complete tracing and docu-
mentation of the car’s state of construction is a main issue.
The radio frequency identification, characterising a method transferring data by
means of magnetic fields or electromagnetic waves through air interface, creates
new opportunities to enhance efficiency and transparency in the supply chain be-
cause of the consistent and explicit identification of automobile parts.
The labelling and identification of automobile single parts – especially inside the ve-
hicle – poses a challenge due to the negative effects of metal on the performance of
RFID-systems which cannot be solved with a currently available system.
The paper’s aim was the development of technical concepts for labelling employed
automobile parts by means of the RFID.technology and to proof the technical feasibil-
ity of a RFID based documentation of the state of construction.
Therefore a concept to decouple the transponder from conductive materials was de-
veloped by using a special absorber to enable the essential labelling of metal parts
out of metal to fulfill the application’s specific requirements.
To identify labelled parts inside the vehicle different technical concepts were consid-
ered and accordingly developed and tested for their adoption within RFID based
documentation of the state of construction. By using the specific combination of two
different antenna concepts it could be demonstrated within the scope of a field
evaluation with a representative test automobile that RFID technology offers the op-
portunity to label vehicle units and to identify them when installed.
Inhaltsverzeichnis
V
Vorwort ................................................................................................... I
Kurzzusammenfassung....................................................................... III
• Lesegerät (LG) beziehungsweise Schreib-/Lesegerät (SLG) mit Kopplungs-
einheit (Spule bzw. Antenne)9
• Applikation zur Steuerung des SLG und Weiterverarbeitung der Daten
7 CCD-Matrix ist die Abkürzung für Charged-Coupled-Device-Matrix und steht für einen Bildwandler,
der einfallendes Licht in elektrische Ladungen umwandelt 8 Ein Transponder (Kunstwort aus den englischen Wörtern: Transmitter: Sender; Responder: Antwort-
geber) ist ein aus Empfänger und Sender bestehendes Bauelement kommunikationstechnischer An-
lagen, welches Funksignale einer Sendestation empfängt, aufbereitet und anschließend weiterleitet
[MIC-04]. 9 Ein Schreib-/Lesegerät wird im Folgenden auch als Reader bezeichnet.
2 Einführung in die Radiofrequenzidentifikation
19
Transponder
Transponder
Transponder
Schreib-/Lesegerät
Kommandos Daten
Daten
Energie*
* Energie wird nicht bei allen Systemen übertragen (siehe Kapitel 2.4)
Abbildung 2-7: Komponenten eines RFID-Systems
(in Anlehnung an [LAM-05])
Die Definition der Komponenten eines RFID-Systems ist dabei nicht in allen Quellen
einheitlich. Beispielweise zählt [FIN-06] die Softwareapplikation nicht zu den System-
komponenten. Aufgrund der Menge an anfallenden Daten bei einem durchgängigen
Einsatz der RFID-Technologie zur unternehmensübergreifenden Produktverfolgung
und Prozesssteuerung kommt gerade deren Verarbeitung wie auch der Steuerung
der RFID-Lesegeräte große Bedeutung zu. Bei einer Kennzeichnung des gesamten
Sortiments im Supermarkt würde beispielsweise bei der Wal-Mart Handelskette in
drei Tagen ein Datenvolumen im Terrabytebereich anfallen, das der gesamten Biblio-
thek des US-Kongresses entspricht [PAL-04]. Dies hat zu Konsequenz, dass nur
durch effiziente Filterung, Speicherung, Umwandlung, Prüfung und Weiterverarbei-
tung der mit Hilfe eines RFID-Systems gewonnen Daten eine effiziente Nutzung und
durchgängige Transparenz in den Prozessen gewährleistet ist. Aus diesem Grund
wird im Rahmen der Arbeit die Steuerung und insbesondere die Filterung der Daten
als wesentliche Komponente eines RFID-Systems angesehen, wodurch die Definiti-
on mit Einbeziehung der Softwareapplikation zur Anwendung kommt.
2 Einführung in die Radiofrequenzidentifikation
20
Im Folgenden wird auf die beiden Hardwarekomponenten Transponder und SLG nä-
her eingegangen. Eine detaillierte Beschreibung der Funktionsweise eines RFID-
Systems erfolgt in Kapitel 2.4.
2.1.2.1 Transponder
Der mobile Datenträger zur Kennzeichnung des Objektes wird als Transponder (eng-
lisch: tag) bezeichnet. Er besteht aus einem Koppelelement und einem elektroni-
schen Mikrochip, der neben der Steuerung aller Datenverarbeitungs- und
-übertragungsprozesse auch zur Informationsspeicherung dient und den eigentlichen
Datenträger darstellt. Die Kopplungseinheit dient zur Energiegewinnung und als An-
tenne zur Datenübertragung und bestimmt im Wesentlichen die Größe des
Transponders [ENV-07]. Je nach Frequenz ist sie im Regelfall als Dipol oder Spule
ausgeführt (siehe Kapitel 2.4).
In Abbildung 2-8 sind die gängigsten Bauformen von Transpondern exemplarisch
abgebildet.
Abbildung 2-8: Verschiede Bauformen von Transpondern (in Anlehnung an [LAM-05])
Hinsichtlich der Flexibilität lassen sich diese nach [AIM-00] in folgende zwei Gruppen
einteilen:
Aufbringung auf ein Etikett
Bei dieser Bauform wird die Transponderantenne mit Hilfe von Siebdruck oder einer
Ätztechnik auf eine sehr dünne Plastikfolie (ca. 0,1 mm) aufgebracht [FIN-06], auf
der anschließend der Mikrochip appliziert wird. Diese funktionsfähige Rohform des
Transponders wird als Inlay bezeichnet [BIT-06]. Durch die Aufbringung einer Pa-
Mikrochip Spule/Antenne Dipolantenne Mikrochip
2 Einführung in die Radiofrequenzidentifikation
21
pierschicht auf der Oberseite und die Beschichtung der Rückseite mit einem Kleb-
stoff kann das Inlay zu einem Selbstklebeetikett10 weiterverarbeitet werden (vgl.
Abbildung 2-9).
Durch die selbstklebende, flexible Etikettenform bietet diese Bauform die Möglichkeit
der zusätzlichen Bedruckung und damit der Verbindung zwischen Barcode und Klar-
schriftinformation. Des Weiteren können gängige Applikationsverfahren zum Aufbrin-
gen des Etiketts auf das Objekt genutzt werden, wodurch dieser Vorgang
automatisiert und kostengünstig durchgeführt werden kann. Gerade durch die hohe
Flexibilität und die einfache Applizierung sind die Smart Label die gängigste und kos-
tengünstigste Transponderart zur Kennzeichnung von Produkten. Allerdings ist sie
empfindlich gegenüber mechanischen und thermischen Belastungen.
Trägerpapier (Liner]
Verpackung (Etikettenschicht und Klebstoff)
Folieninlay mit Antenne
Transponderchip
Abbildung 2-9: Bestandteile eines Smart Label [JAN-04]
Einbringung in ein Gehäuse
Für den Einsatz in widrigen Umgebungsbedingungen können Inlays zum Schutz vor
Verschmutzung, Säuren oder hohen Temperaturen in Kunststoffe oder anderen Ma-
terialien eingebracht werden. Dies hat eine im Vergleich zu den Etiketten größere
Bauform zur Folge und bedingt durch die starre Struktur bei der Produktkennzeich-
nung die Notwendigkeit großer planarer Flächen auf dem Objekt. Außerdem ist die
Herstellung wie auch die Applikation mit höheren Kosten verbunden.
2.1.2.2 Schreib-/Lesegerät
Neben dem mobilen Datenträger stellt das Schreib-/Lesegerät (SLG) die zweite we-
sentliche Hardwarekomponente eines RFID-Systems dar. Unter SLG versteht man
10 Diese Bauform wird auch als Label oder Smart Label bezeichnet.
2 Einführung in die Radiofrequenzidentifikation
22
dabei Steuergeräte, die die Steuerung der Antennen und die Logik zur Übertragung
der empfangenen Daten an die Applikation übernehmen [HAN-06].
Sie bestehen aus einem Hochfrequenzmodul (Sender und Empfänger), einer Kon-
trolleinheit sowie einer integrierten oder abgesetzten Antenne als Koppelelement
zum Transponder. Die Bauformen von Lesegeräten werden hauptsächlich durch die
Größe und Form der verwendeten Antennen bestimmt. Während bei mobilen Gerä-
ten der Rechner und die Antenne in ein Gehäuse integriert sind11, findet bei Einzel-
antennen oder einer Gateanordnung (Zusammenschluss von mindestens zwei
Antennen zu einem Tor) in der Regel eine räumliche Trennung von Recheneinheit
Abbildung 2-13: Überblick über nutzbare RFID-Frequenzen in Deutschland und dazugehörige
beispielhafte Anwendungen
Zur Gruppierung der RFID-Systeme lassen sich die Frequenzen in folgende vier
Klassen gliedern [OVE-05]:
• Low Frequency (LF) – Systeme von 100-135 kHz
• High Frequency (HF) – Systeme bei 13,56 MHz
• Ultra High Frequency (UHF) – Systeme bei 868 MHz
• Short High Frequency (SHF)15 – Systeme bei 2,45 GHz und 5,8 GHz
Der Frequenzbereich des Systems legt gleichzeitig die Art der Kopplung zwischen
Transponder und Reader fest. Bei LF- und HF-Systemen ist der Reader mit dem
mobilen Datenspeicher induktiv oder kapazitativ gekoppelt, während bei UHF- und
SHF-Systemen die elektromagnetische Kopplung16 genutzt wird. Bedingt durch die
Kopplungsart sind die niederfrequenten Systeme durch geringere Reichweiten ge-
kennzeichnet. Aufgrund der elementaren Bedeutung wird die Lesereichweite der
Systeme in Abhängigkeit der jeweiligen Arbeitsfrequenz im Kapitel 2.5 ausführlich
betrachtet.
Auf Basis der Arbeitsfrequenz ergibt sich die Wellenlänge des von der Readeranten-
ne abgestrahlten Feldes mit Hilfe der Formel [KUC-01]:
15 Dieser Frequenzbereich wird auch als Mikrowelle bezeichnet. 16 Diese Kopplung wird auch als Backscatter bezeichnet.
2 Einführung in die Radiofrequenzidentifikation
28
f
c=λ (2-1)
mit: λ: Wellenlänge [m]
f: Frequenz [Hz]
c: Lichtgeschwindigkeit (c = 3,0·108
s
m) [m/s]
Die Wellenlängen für die verschiedenen Frequenzbereiche sind in Tabelle 2-1 dar-
gestellt.
Tabelle 2-1: Wellenlängen der jeweiligen Frequenzgruppen
LF HF UHF SHF
Wellenlänge [m] 2.222-3.000 22 0,35 0,05-0,12
Durch eine kürzere Wellenlänge beziehungsweise mehr Schwingungen pro Zeitein-
heit können mehr Informationen pro Zeiteinheit übertragen werden. Dadurch steigt
die Datenübertragungsgeschwindigkeit mit der Frequenz an (siehe Abbildung 2-14).
Dies hat zur Konsequenz, dass sich mit höherer Frequenzen neben größeren
Reichweiten komplexere Anwendungen durch den höheren Daten- und Energietrans-
fer realisieren lassen (vgl. Abbildung 2-13).
Abbildung 2-14: Abhängigkeit der übertragbarer Datenmenge von der Wellenlänge [GS1-06]
2 Einführung in die Radiofrequenzidentifikation
29
2.3.2 Energieversorgung des Transponders
RFID-Transponder benötigen Energie zum Betrieb des Mikrochips und zum Transfer
der Daten. Dabei lassen sich drei verschiedene Arten der Energieversorgung unter-
scheiden [LAM-05]:
• Passive Transponder: Die Energie wird aus dem Feld des Lesegerätes ge-
wonnen und für den Mikrochip und die Datenübertragung verwendet.
• Semi-aktive Transponder17: Die Versorgung des Mikrochips wird von einer in-
ternen Batterie übernommen. Zum Senden der Daten wird die gewonnene
Energie aus dem Feld der Readerantenne verwendet.
• Aktive Transponder: Sie verwenden die zugehörige Batterie zur Energiever-
sorgung des Mikrochips und zum Senden der Daten. Die Energie des Lesefel-
des wird nur zur Aktivierung des Transponders verwendet.
Die aktiven RFID-Systeme werden in der Literatur nicht durchgängig zu den RFID-
Systemen gezählt. [FIN-06] beschränkt RFID-Systeme auf passive und semi-aktive
Transponder, wobei [FIN-06] das nach obiger Definition semi-aktive System als aktiv
bezeichnet. In der Mehrzahl der Literaturquellen (u.a. [BSI-04, FRA-06, GS1-07,
HAN-06, JAN-04, und LAM-05]) findet die im Rahmen dieser Arbeit verwendete Defi-
nition Anwendung.
Durch die integrierte Batterie besitzen aktive und semi-aktive RFID-Transponder eine
deutlich höhere Reichweite im Vergleich zu passiven Systemen, weil die Energie
zum Betrieb des Datenspeichers nicht aus dem Feld gewonnen werden muss. Der
Transponder wird lediglich durch das Erregersignal der Readerantenne aktiviert. Be-
findet sich der Transponder außerhalb des Ansprechfeldes, wird er in einen Stand-
by-Modus versetzt. Die eigene Energieversorgung des Mikrochips bietet zudem die
Möglichkeit, größere Speicher zu betreiben und aufwendigere Mikroprozessoren mit
Verschlüsselungsalgorithmen sowie Sensoren zu integrieren [FRA-06].
Allerdings sind diese Transponder deutlich teurer als passive Systeme und bedingen
größere Bauformen. Außerdem ist die Lebenszeit des Transponders durch die Batte-
riekapazität in Abhängigkeit der Nutzungshäufigkeit des Transponders begrenzt
[FRA-06]. Aus diesem Grund werden sie aus wirtschaftlichen Gesichtpunkten im Re-
gelfall entweder in geschlossen Kreisläufen oder an Objekten mit hohem Wert einge-
setzt. 17 Die Bezeichnung semi-passiv wird teilweise in der Literatur synonym verwendet [KLE-04].
2 Einführung in die Radiofrequenzidentifikation
30
Passive mobile Datenspeicher müssen die Energie zum Betrieb des Mikroprozessors
und zum Senden der Daten aus dem Feld der Leseantenne gewinnen, wodurch nur
persistente Speichermedien, die ihre Daten ohne Energieversorgung behalten und
sich durch einen geringen Energieverbrauch auszeichnen, eingesetzt werden können
[FRA-06]. Aus diesem Grund wurden die ersten passiven Transponder erst durch die
Entwicklung der Integrated Circuit(IC)-Technologie, insbesondere der Complementa-
ry Metal Oxid Semiconductor(CMOS)-Technik, deren Schaltungen durch einen ex-
trem geringen Energieverbrauch charakterisiert sind, ermöglicht [HAE-04].
Technisch ist somit die Reichweite von passiven Systemen im Vergleich zu aktiven
geringer, sie können aber im Gegenzug in einfacherer Bauweise und fast beliebiger
Bauform kostengünstig hergestellt werden.
Im LF- und HF-Bereich existieren lediglich passive Systeme. Bei auf UHF- und SHF-
basierenden RFID-Systemen sind sowohl passive als auch aktive Systeme auf dem
Markt erhältlich, wobei im UHF-Bereich die passiven Systeme überwiegen und im
SHF-Bereich größtenteils aktive Systeme zum Einsatz kommen.
2.3.3 Art des Speicherzugriffs
Neben der Arbeitsfrequenz und der Energieversorgung stellt die Beschreibbarkeit
des Transponders ein wichtiges Charakterisierungs- und Leistungsmerkmal dar. Da-
bei lassen sich die folgenden zwei Klassen unterscheiden:
• Read-Only Transponder:
Diese Art der mobilen Datenspeicher ist vom Hersteller mit einer unikaten
Identifikationsnummer beschrieben, die nicht geändert, ergänzt oder
überschrieben werden kann. Aufgrund des einfachen Aufbaus können diese
Transponder preisgünstig hergestellt werden und kommen insbesondere in
einfachen Anwendungen, in denen keine Datenspeicherung erforderlich ist,
wie beispielsweise bei der Tieridentifikation oder Zutrittskontrolle, zum Ein-
satz.
Als Sonderform existieren im Rahmen dieser Klasse die so genannten
WORM-Transponder18, die eine einmalige unveränderliche Codierung der In-
formation auf dem Transponder erlauben, die dann beliebig oft ausgelesen
werden kann [BIT-06]. In anderen Literaturquellen, beispielsweise [SHJ-06],
18 Die Abkürzung WORM steht für den englischen Ausdruck Write Once Read Many.
2 Einführung in die Radiofrequenzidentifikation
31
wird ein WORM-Transponder als ein mobiler Datenspeicher mit einer herstel-
lerseitig unveränderlich codierten Seriennummer und einem einmalig be-
schreibbaren Speicherbereich definiert. Durch die Weiterentwicklung der
Chiptechnologie und der damit verbundenen Möglichkeit bestimmte Speicher-
bereiche zu fixieren19 ist die Bedeutung dieser Art von Transpondern stark zu-
rückgegangen ist. Aus diesem Grund wird im Rahmen dieser Arbeit die auf
den gesamten Speicherbereich bezogene Definition verwendet.
• Read/Write Transponder:
Diese Transponder verfügen über individuell beschreibbare Speicherbereiche,
die beliebig oft mit Hilfe eines Schreib-/Lesegerätes überschrieben werden
können. Wie oben beschrieben, besitzen Transponder der neusten Generati-
on die Möglichkeit die Speicherbereiche teilweise oder gesamt zu fixieren, um
eine nachträgliche Manipulation der gespeicherten Daten zu verhindern.
2.3.4 Speicherkapazität
Die Speicherkapazität des mobilen Datenträgers wird durch den applizierten Mikro-
chip und die maximal übertragbare Leistung festgelegt. Bei passiven Systemen muss
die Energie zum Betrieb des Transponders aus dem Feld gewonnen werden, so
dass sich hier – insbesondere bei kurzen Verweilzeiten im Lesefeld – nur geringe
Speicherkapazitäten realisieren lassen. Im Regelfall beträgt die Speichermenge für
passive Systeme derzeit zwischen 128 und 2048 Bit. Zudem sinkt die Leistungsfä-
higkeit des RFID-Systems mit einer zunehmenden dezentralen Datenhaltung stark
ab, so dass insbesondere in Logistikanwendungen mit Pulkerfassung eine starke
Reduzierung der Datenmenge bis hin zu einer eindeutigen Identifizierungsnummer
auf dem Transponder anzustreben ist. Des Weiteren lässt sich die Übertragung von
großen Datenvolumina nur realisieren, wenn sich der Transponder lange im An-
sprechfeld des Lesegerätes befindet. Durch die im Verhältnis großen Reichweiten
und die eigene Energieversorgung von aktiven Systemen sind diese prädestiniert für
eine hohe Speicherkapazität. Auf dem Markt sind derzeit Systeme mit bis zu 64 kBy-
te erhältlich, wodurch sich in Kombination mit Sensoren beispielsweise die dezentra-
le Aufzeichnung von Messreihen realisieren lässt.
19 Dies wird auch als Locken des Speicherbereichs bezeichnet.
2 Einführung in die Radiofrequenzidentifikation
32
2.4 Funktionsweise der Energie- und Datenübertragung
Die Leistungsfähigkeit von RFID-Systemen wird grundlegend von den Umgebungs-
bedingungen und dem Applikationsuntergrund für den mobilen Datenträger beein-
flusst. Der untersuchte Einsatzfall der Technologie zur automatischen
Bauzustandsdokumentation im Fahrzeug ist somit aufgrund der Vielzahl zu kenn-
zeichnender metallischer Bauteile und der metallischen Umgebung, in der die Bautei-
le identifiziert werden müssen, von großen Herausforderungen geprägt. Um im
Verlauf der Arbeit die theoretischen Auswirkungen im Anwendungsfall weiter vertie-
fen zu können und darauf aufbauend Lösungskonzepte zu entwickeln, werden im
Folgenden die Eigenschaften von RFID-Systemen in Abhängigkeit der physikali-
schen Grundlagen hergeleitet.
Für das physikalische Funktionsprinzip der Daten- und Energieübertragung zwischen
Reader und Transponder ist entscheidend, ob diese im Nah- oder Fernfeld des Rea-
derantennenfeldes stattfindet [VDE-06].
Auf Basis des Induktionsgesetzes bildet sich durch ein magnetischen Feld in zuneh-
menden Abstand zur Antenne auch ein elektrisches Feld aus und umgekehrt [HER-
04]. Das daraus entstehende elektromagnetische Feld beginnt sich bei einem Ab-
stand von λ/2 · π von der Antenne zu lösen und als elektromagnetische Welle mit
Lichtgeschwindigkeit in den Raum zu wandern20 [FIN-06, KOL-00]. Ab dieser Entfer-
nung kann keine direkte und detektierbare Rückmeldung auf die Antenne des Rea-
ders mehr erfolgen [VDE-06]. In Tabelle 2-2 ist dieser Übergang vom Nah- zum
Fernfeld für die jeweiligen Frequenzen dargestellt.
Tabelle 2-2: Übergang vom Nahfeld zum Fernfeld für die jeweiligen Frequenzbereiche
LF HF UHF SHF
Nahfeld / Fern-
feldübergang [m] 354-477 3,5 0,05-0,06 0,01-0,02
Aufgrund der großen Wellenlänge findet bei den nieder- und hochfrequenten RFID-
Systemen die Daten- und Energieübertragung zwischen Reader und Transponder im
Nahfeldbereich statt. Physikalisch bedingt erfolgt die Übertragung dadurch mittels
induktiver oder kapazitiver Kopplung. Diese werden durch die direkte Rückwirkung
20 Dieser Grenzwert wird als Übergang vom Nah- zum Fernfeld bezeichnet.
2 Einführung in die Radiofrequenzidentifikation
33
der mobilen Datenspeicher auf das Readerantennenfeld auch als direkte Kopplungs-
arten bezeichnet. Der Beginn des Fernfeldes stellt damit eine feste Grenze für direkt
gekoppelte RFID-Systeme dar. Die ultrahochfrequenten und mikrowellenbasierten
RFID-Systeme, die aufgrund ihrer Wellenlänge im Fernfeld des Readerantennenfel-
des gekoppelt sind, arbeiten auf Basis des Radarprinzips mit der Rückstrahlung der
abgelösten sich im Raum ausbreitenden elektromagnetischen Wellen des Feldes.
Die Kopplung erfolgt dadurch physikalisch bedingt in diesen Frequenzbereichen indi-
rekt.
Zusammenfassend lassen sich bei RFID-Systemen die in Abbildung 2-15 dargestell-
ten frequenzabhängigen Kopplungsarten unterscheiden.
Kapazitiv(elektrisches Feld)
Induktiv(magnetisches Feld)
Backscatter(elektromagnetisches Feld)
Übertragungs-verfahren
Gen
utz
tes
Fel
dT
ypis
che
Ver
tret
er
Kontaktlose Karten
< 135 kHz, 13,56 MHz
Transponder nach „Bi-Statix“
Transponder mit
< 135 kHz
13,56 MHz
Transponder mit
870 MHz, 915 MHz,
2,4 GHz,
5,8 GHz
Abbildung 2-15: Daten- und Energieübertragungsverfahren von RFID-Systemen
(in Anlehnung an [KER-06])
Neben dem physikalischen Kopplungsprinzip können RFID-Systeme auch nach dem
zeitlichen Ablauf der Energie- und Datenübertragung eingeteilt werden. Entspre-
chend Abbildung 2-16 unterscheidet man sequentielle Verfahren und Duplex-
Verfahren. Bei den sequentiellen Verfahren erfolgt die Energie- und Datenübertra-
gung vom Reader zum Transponder (uplink) zeitlich getrennt von der reversen Da-
tenübertragung vom Transponder zum Reader (downlink), wodurch diese nicht von
der Energieübertragung und dem uplink überlagert wird. Bei den Duplex-Verfahren
kann zusätzlich in Halb- und Vollduplex-Verfahren (HDX und FDX), je nachdem, ob
uplink und downlink sich zeitlich überschneiden (FDX) oder getrennt (HDX) stattfin-
2 Einführung in die Radiofrequenzidentifikation
34
den, unterschieden werden. Das Vollduplex-Verfahren kann dabei aufgrund der
Überschneidung von up- und downlink nur bei Systemen eingesetzt werden, bei der
die Antwort des Transponders auf einer anharmonischen Frequenz erfolgt [FIN-06].
Abbildung 2-16: Einteilung der RFID-Systeme nach dem zeitlichen Ablauf der Energie- und
Datenübertragung (in Anlehnung an [FIN-06])
Im Folgenden werden die physikalischen Funktionsprinzipien der Kopplungsarten
detailliert beschrieben.
2.4.1 Kapazitive Kopplung
Die kapazitive Daten- und Energieübertragung nutzt das elektrische Feld, das elekt-
risch geladene Körper umgibt, und beispielsweise zwischen den Platten eines Kon-
densators entsteht [PHY-98].
Bei Systemen, die für sehr geringe Reichweiten von unter 1 cm ausgelegt sind21 -
beispielsweise RFID-gestützte Ausweise zur Personenidentifikation – kommt dieses
Funktionsprinzip des Plattenkondensators zum Einsatz. Durch die Ausführung der
Antennen des Readers und des Transponders als isolierte Koppelfläche bilden sie
bei hinreichend kleinem Abstand einen Plattenkondensator, wodurch sich ein elektri-
sches Feld zwischen den beiden Komponenten ausbildet. Dieses versorgt den
21 Diese Systeme werden auch als close-coupling Systeme bezeichnet.
2 Einführung in die Radiofrequenzidentifikation
35
Transponder mit Energie (siehe Abbildung 2-17) [FIN-06]. Die Übertragung der Da-
ten erfolgt mit Hilfe der Modulation des elektrischen Feldes durch einen zuschaltba-
ren Widerstand22.
Abbildung 2-17: Kapazitive Kopplung bei close-coupling Systemen [KER-06]
Bei Systemen mit Reichweiten von bis zu 1,5 m − man spricht hier von remote-
coupling Systemen − wird das elektrische Feld genutzt, das zwischen einer Elektrode
und dem Erdpotenzial bei einer hochfrequenten Spannung an einer Elektrode ent-
steht. Das auf diesem Funktionsprinzip vom Reader erzeugte elektrische Feld gene-
riert bei einem im Ansprechfeld befindlichen Transponder an dessen Elektroden eine
geringe Spannung, die zur Versorgung des Transponders mit Energie verwendet
wird (siehe Abbildung 2-18). Hierzu werden am Lesegerät Spannungen in der Grö-
ßenordnung von einigen hundert bis einigen tausend Volt benötigt [FIN-06]. Die
Übertragung der Daten erfolgt analog zu den close-coupling Systemen mit Hilfe ei-
nes Lastwiderstandes durch die direkte Kopplung zwischen Transponder und Rea-
der, wodurch ein veränderter Widerstand eines Systempartners eine Veränderung
der Spannung im gekoppelten System bewirkt.
22 Das Verfahren wird auch als Lastmodulation bezeichnet.
2 Einführung in die Radiofrequenzidentifikation
36
Abbildung 2-18: Kapazitive Kopplung bei remote-coupling Systemen [KER-06]
Aufgrund der relativ komplexen Bauart und der für größere Reichweiten benötigten
sehr hohen Spannungen sowie durch in der Praxis schwankender Lesereichweiten
hat sich diese Kopplungsart bei remote-coupling Systemen nicht durchsetzen kön-
nen. Im Bereich der close-coupling Systeme existieren hingegen insbesondere im
Bereich der Personen- und Betriebsmittelidentifikation zahlreiche Anwendungen.
Diese Systeme sind durch die geringe Reichweite und die geringe Leistungsfähigkeit,
bedingt durch die niedrige Frequenz, für die RFID-basierte Bauzustandsdokumenta-
tion nicht geeignet und werden deswegen im Rahmen der Arbeit hier nur ergänzend
erwähnt und nicht detaillierter betrachtet.
2.4.2 Induktive Kopplung
Induktiv gekoppelte Systeme nutzen magnetische Felder und das Prinzip der Induk-
tion und Gegeninduktion zur Energie- und Datenübertragung.
2.4.2.1 Entstehung des magnetischen Feldes
Auf Basis des Durchflutungsgesetzes ist mit jeder bewegten Ladung, beispielsweise
Elektronen in einem Leiter, die Bildung eines magnetischen Feldes mit geschlosse-
nen Feldlinien verbunden (vgl. Abbildung 2-19). Die der Ursache des magnetischen
Feldes zugeordnete Größe ist dabei die magnetische Feldstärke H [A/m] [IBF-04].
Das Durchflutungsgesetzes in der allgemeinen Form beschreibt, dass das Umlaufin-
2 Einführung in die Radiofrequenzidentifikation
37
tegral der magnetischen Feldstärke längs einer geschlossenen Kurve gleich der von
der Kurve eingeschlossenen Ströme ist [KUC-01]. Darstellen lässt sich dies mit Hilfe
der Formel:
∑ ∫= dsHI (2-2)
mit: I: Eingeschlossener Stromfluss [A]
H: Magnetische Feldstärke [A/m]
s: Umlaufweg [m]
Abbildung 2-19: Magnetische Feldlinien um einen stromdurchflossenen Leiter
Zur Erzeugung des magnetischen Wechselfeldes bei induktiv gekoppelten RFID-
Systemen werden kurze Zylinderspulen oder rechteckige Leiterschleifen als Antenne
verwendet. Jede Spulenwindung kann dabei als stromdurchflossener Leiter betrach-
tet werden und es ergibt sich durch die Überlagerung der magnetischen Wechselfel-
der eine höhere magnetische Feldstärke H (vgl. Abbildung 2-20).
s
2 Einführung in die Radiofrequenzidentifikation
38
Abbildung 2-20: Verlauf der Feldstärke in einer Spule
a) schematisch und b) sichtbar mit Hilfe von Eisenspänen [TIP-94]
Für den Verlauf der Feldstärke entlang ihrer Achse kann nach [PAU-93] unter der
Bedingung, dass die Länge der Spule viel kleiner als der Spulenradius R ist23, fol-
gende Beziehung für das magnetische Nahfeld hergestellt werden:
²)³²(2
²
xR
RNIH
+⋅⋅= (2-3)
mit: N: Anzahl der Spulenwindungen [-]
R: Kreisradius der Spule [m]
x: Abstand zur Spulenmitte [m]
Dadurch ergibt sich, dass wechselstromdurchflossene Spulen mit kleinem Radius R
in unmittelbarer Nähe zur Spulenachse (xà 0) höhere magnetische Feldstärken er-
zeugen, diese aber schon in kurzer Distanz zur Achse direkt proportional zu x3 stark
23 Diese Spulenform wird auch als kurze Zylinderspule oder Leiterschleife bezeichnet.
H
2 Einführung in die Radiofrequenzidentifikation
39
abfallen. Um eine hohe Lesereichweite bei induktiv gekoppelten Systemen zu errei-
chen, müssen deshalb große Readerantennen eingesetzt werden. Falls hohe Strom-
stärken zum Betrieb des Transponders benötigt werden, beispielsweise bei der
Integration von Sicherheitsalgorithmen, werden hingegen Readerantennen mit klei-
nen Abmaßen benötigt (siehe Abbildung 2-21).
0,01 0,1 1 101·10-3
1·10-8
1·10-7
1·10-6
1·10-5
1·10-4
1·10-3
0,01
0,1
1
10
100
Mag
netis
che
Fel
dstä
rke
H [A
/m]
Entfernung x [m]
Radius R = 55 cm Radius R = 7,5 cm Radius R = 1 cm
Abbildung 2-21: Verlauf der magnetischen Feldstärke bei kurzen Zylinderspulen im Nahfeld in
Abhängigkeit des Spulenradius R (in Anlehnung an [FIN-06])
Für die häufig als Sendeantennen eingesetzten rechteckigen Leiterschleifen ergeben
sich analoge Zusammenhänge auf Basis der Kantenlängen.
In Abbildung 2-22 sind Beispiele für die Ausführung von Readerantennen für induktiv
gekoppelte Systeme dargestellt.
2 Einführung in die Radiofrequenzidentifikation
40
Kartenleser mit integrierter kompakter
Antenne für kontaktbehaftete Identifizie-
rung mit Sicherheitsalgorithmen
(Reichweite < 10 cm)
Leiterschleifenantennen für Mid-Range
und Long-Range-Systeme (Reichweite
ist abhängig von Leiterschleifengröße)
Abbildung 2-22: Readerantennen für unterschiedliche Lesereichweiten [FEI-07]
2.4.2.2 Energieübertragung zwischen Reader und mobilen Datenträger
Nachfolgend wird aufbauend auf der Entstehung des magnetischen Feldes die Ener-
gieübertragung von der Reader- zur Transponderantenne beschrieben.
Auf Basis des Induktionsgesetzes wird in einer von einem magnetischen Wechselfeld
durchzogenen Spule oder geschlossenen Leiterschleife eine Spannung induziert
[KUC-01]. Die Höhe der induzierten Spannung in der Spule hängt dabei von der Än-
derung der magnetischen Feldstärke und der Gesamtzahl der die Spule durchset-
zenden Feldlinien ab und kann mit Hilfe der folgenden Formel beschrieben werden:
dAdt
dHNu n
ind ⋅⋅⋅−= ∫µ (2-4)
mit: uind: Induzierte Spannung [V]
µ: Permeabilität24 der durchfluteten Spulenfläche [Vs/Am]
Hn: Normalkomponente der magnetischen Feldstärke
in Richtung der Spulenfläche [A/m]
A: von Hn durchflutete Fläche [m2]
(im Regelfall mit der Fläche der Spule identisch)
24 Die Permeabilität bezeichnet die magnetische Leitfähigkeit und wird berechnet durch das Produkt
der magnetischen Feldkonstante µ0 (Permeabilität des Vakuums) und der Permeabilitätszahl µr, die
die Vergrößerung oder Abschwächung der Induktivität durch Einbringen eines Stoffes in das Feld
quantifiziert.
2 Einführung in die Radiofrequenzidentifikation
41
Das Produkt aus der Permeabilität µ und der magnetischen Feldstärke H wird auch
als magnetische Induktion B25 bezeichnet und ist ein Maß für den je Flächeneinheit
und Windung induzierten Spannungsstoß. Der eine Fläche senkrecht durchdringen-
de Anteil der magnetischen Induktion B integriert über die Fläche A ist definiert als
magnetischer Fluss Φ. Dadurch lässt sich die Formel (2-4) vereinfacht wie folgt be-
schreiben26:
dt
dNuind
Φ−= (2-5)
mit: Φ: Magnetischer Fluss [Vs]
Bei der Induktion lassen sich generell zwei Fälle unterscheiden:
• Selbstinduktion:
Das durch eine Stromänderung di/dt in einer Leiterschleife erzeugte
Wechselfeld in den eigenen Windungen.
• Gegeninduktion:
Das durch eine zeitliche Stromänderung di/dt in einer Leiterschleife
erzeugte Wechselfeld induziert eine Spannung in einer benachbar-
ten Leiterschleife.
Betrachtet wird zunächst die Selbstinduktion. Bei einem RFID-System kennzeichnet
sie die induzierte Spannung in der Readerantenne durch das von ihr generierte und
ausgehende magnetische Wechselfeld. Die den Reader betreffende physikalische
Größen werden im folgendem mit dem Index R gekennzeichnet. Die in die eigenen
Windungen induzierte Spannung wirkt der anliegenden Spannung nach der
Lenz’schen Regel entgegen und ist dabei direkt proportional zum Stromfluss in der
Spule. Der Proportionalitätsfaktor wird als Induktivität L27 bezeichnet [KUC-01].
Mit Hilfe der Formeln (2-4) und (2-5) lässt sich damit die Induktivität L der Readeran-
tenne ausdrücken durch:
25 Die magnetische Induktion wird auch als magnetische Flussdichte bezeichnet. 26 Die Formelschreibweise gilt als allgemeine Form des Induktionsgesetzes. 27 Für die Induktivität L werden in der Literatur die Begriffe Selbstinduktionskoeffizient und Eigeninduk-
tivität synonym verwendet.
2 Einführung in die Radiofrequenzidentifikation
42
R
R
RnR
RR
R
R
R
R
R
R
R
indR
R
dAdI
IdHN
dI
dN
dt
dIdt
dN
dt
dI
uL
∫⋅⋅−
=Φ
⋅−=
Φ⋅−
==
)(µ
(2-6)
mit: LR: Induktivität der Readerantenne [H]
uRind: Induzierte Spannung in die Readerantenne [V]
IR: Stromfluss in der Readerantenne [A]
NR: Anzahl der Spulenwindungen der Readerantenne [-]
ΦR: Magnetische Fluss durch die Readerantenne [Vs]
µR: Permeabilität der durchfluteten Readerantenne [Vs/Am]
HRn: Normalkomponente der magnetischen Feldstärke
in Richtung der Readerantennenfläche [A/m]
AR: Von HRn durchflutete Readerantennenfläche [m2]
(im Regelfall mit der Fläche der Spule identisch)
Der Effekt der Gegeninduktion beschreibt, dass das magnetische Wechselfeld eine
Spannung in einer benachbarten Leiterschleife erzeugt. Dies ist die physikalische
Grundlage für die Energieversorgung der mobilen Datenspeicher bei RFID-
Systemen. Vorraussetzung ist, dass die Antenne der Transponder bei induktiv ge-
koppelten Systemen ebenfalls als Spule oder rechteckige Leiterschleife ausgeführt
ist. In Abbildung 2-23 sind beispielhaft verschiedene Antennenbauformen von induk-
tiv gekoppelten Transpondern dargestellt.
LF-Systeme HF-Systeme
Abbildung 2-23: Mobile Datenträger auf Basis induktiver Kopplung mit unterschiedlichen
Antennen [RRY-07, SOK-07, UPM-07]
2 Einführung in die Radiofrequenzidentifikation
43
Die transponderbezogenen physikalischen Größen werden im Folgenden mit dem
Index T bezeichnet.
Die im mobilen Datenspeicher induzierte Spannung lässt sich mit Hilfe der Formel (2-
4) und (2-5) wie folgt ausdrücken:
T
RT
TT
T
RT
TRT
TindT
dAdt
IdHN
dAdt
IdBN
dt
IdNu
n
n
∫
∫
⋅⋅
=⋅−=Φ−=
)(
)()(
µ
(2-7)
mit: uTind: Induzierte Spannung im Transponder [V]
NT: Anzahl der Spulenwindungen des Transponders [-]
ΦT: Magnetischer Fluss durch die Transponderantenne [Vs]
IR: Stromfluss in der Readerantenne [A]
BTn: Normalkomponente der magnetischen Flussdichte
durch die Transponderspule [T]
µT: Permeabilität der durchfluteten Transponderspulen-
fläche [Vs/Am]
HTn: Normalkomponente der magnetischen Feldstärke durch
die Transponderspule [A/m]
AT: Von HTn durchflutete Antennenfläche des Transponders
(im Regelfall mit der Fläche der Spule identisch) [m2]
Die induzierte Spannung ist neben der die Antenne senkrecht durchdringenden
magnetischen Feldstärke von der Größe der Transponderantenne und deren Win-
dungszahl abhängig. Durch die Steigerung der Permeabilität in der Spule, beispiels-
weise durch einen ferromagnetischen28 Kern kann die erzeugte Spannung im
mobilen Datenträger erhöht werden29. Da die Spannungsversorgung des Transpon-
ders mit einer niedrigeren magnetischen Feldstärke sichergestellt werden kann, be-
deutet eine höhere induzierte Spannung gleichzeitig auch eine höhere
Lesereichweite. Auf Basis der Formel (2-7) haben die genannten Faktoren einen di-
28 Materialien mit einer Permeabilitätszahl µr >> 1 werden als ferromagnetisch bezeichnet. Beispiele
für Materialien dieser Art sind Eisen, Kobalt, Nickel. 29 Dies wird unter anderem bei Glastranspondern ausgenutzt, um eine kompakte Bauform zu realisie-
ren (vgl. Glastransponder in Abbildung 2-21).
2 Einführung in die Radiofrequenzidentifikation
44
rekt proportionalen Einfluss. In einen Transponder mit beispielsweise einer doppelten
Antennenfläche wird somit auch die doppelte Spannung induziert.
Aus der Formel (2-7) kann auch die starke Abhängigkeit der Leistungsfähigkeit von
der Lage des Transponders zur Readerantenne hergeleitet werden, da sich nur der
die Transponderfläche senkrecht durchdringende Anteil des magnetischen Flusses
für die induzierte Spannung verantwortlich zeichnet. Dadurch kann ein Transponder
parallel zu den Feldlinien nicht gelesen werden (vgl. Abbildung 2-24).
Abbildung 2-24: Erkennungsbereich von induktiv gekoppelten Systemen und deren Lageab-
hängigkeit am Beispiel eines 134kHz-Transponders [KER-06]
Der auf Basis der Gegeninduktion entstehende Wechselstromfluss im Transponder
hat bedingt durch das Induktionsgesetz die Ausbildung eines eigenen magnetischen
Feldes um die Transponderspule zur Folge.
Dieses mindert die Spannung in der Transponderantenne durch den Effekt der
Selbstinduktion (vgl. Selbstinduktion in der Readerantenne S. 43) und wirkt dem
Magnetfeld der Readerantenne entgegen. Dadurch wird auf Basis des Gegenindukti-
onseffekts in der Readerantenne die Spannung reduziert.
Das Verhältnis zwischen der induzierten Spannung und dem Stromfluss in der An-
tenne ist analog zur Induktivität L als Gegeninduktivität M definiert und lässt sich im
Betrachtungsfall wie folgt ausdrücken:
2 Einführung in die Radiofrequenzidentifikation
45
R
RT
R
R
RT
R
R
TR
TRdI
IdN
dt
dIdt
IdN
dt
dI
uM
)(
)(
Φ⋅−=
Φ⋅−
== (2-8)
mit: MTR: Gegeninduktivität des Transponders auf die
Readerleiterschleife [H]
uTR: Induzierte Spannung in der Readerantenne ausgelöst
durch das Wechselfeld des Transponderstroms [V]
Analog der obigen Definition existiert auch eine Gegeninduktivität zwischen Reader-
antenne und Transponder, ausgelöst durch den Stromfluss in der Transponderan-
tenne. Zwischen den beiden Gegeninduktivitäten gilt der Umkehrsatz aufgrund
dessen beide Größen identisch sein müssen [FIN-06]:
RTTR MMM == (2-9)
Die Gegeninduktivität beschreibt die Verkopplung zweier Stromkreise über das Mag-
netfeld als Medium und ist zwischen zwei Stromkreisen stets vorhanden [FIN-06].
Eine Änderung des Stromflusses in einer Komponente des Systems führt zu einer
Spannungsänderung im anderen Systembestandteil. Aus diesem Grund wird die in-
duktive Kopplung auch als direkte Kopplung bezeichnet.
Die im Rahmen der Induktion erzeugte Spannung im Transponder dient der Versor-
gung des Mikrochips. Der Wirkungsgrad und damit die Leistungsfähigkeit des
Transponders kann dabei durch die Bildung eines Parallelschwingkreises mit Hilfe
eines parallel zum Datenspeicher geschalteten Kondensators stark erhöht werden.
In Abbildung 2-25 ist das Ersatzschaltbild für einen mobilen Datenspeicher mit Paral-
lelschwingkreis dargestellt.
iR
LR LT
~
iT RT
RLACLA
Cp
uM
M
uLA
CT = CP + CLA
Parisitäre KapazitätDatenträger
Abbildung 2-25: Ersatzschaltbild für ein induktiv gekoppeltes RFID-System mit einem Parallel-
schwingkreis gebildet durch ein RC-Glied (in Anlehnung an [FIN-06])
2 Einführung in die Radiofrequenzidentifikation
46
Die Schwingung im Schaltkreis entsteht durch den periodischen Austausch der
Energie zwischen dem magnetischen Feld der Spule und dem elektrischen Feld des
Kondensators. Dabei lassen sich die Gleichungen und Ergebnisse aus der mechani-
schen Schwingung übertragen [GER-03]. Folglich existiert bei einem elektronischen
Schwingkreis eine Frequenz f, bei der der Strom minimal wird, da der größte Teil als
Blindstrom im Kreis selbst rotiert [GER-03]. Daraus resultiert bei dieser Frequenz
eine Spannungsüberhöhung im Schwingkreis. Die Frequenz wird dabei als Reso-
nanzfrequenz bezeichnet und lässt sich für einen Transponder nach der Thomson-
Gleichung in Abhängigkeit der Induktivität und Kapazität wie folgt berechnen [BER-
99]:
TT
TCL
f⋅⋅⋅
=π2
1 (2-10)
mit: fT: Resonanzfrequenz des Transponders [Hz]
LT: Induktivität des Transponderschwingkreises [H]
CT: Kapazität des Transponderschwingkreises [F]
Die Spannung uL, die durch die induzierte Spannung und die Überhöhung im Paral-
lelschwingkreis für den Betrieb des Mikrochips zur Verfügung steht, lässt sich auf
Basis des Ersatzschaltbildes (vgl. Abbildung 2-25) in komplexer Darstellung mathe-
matisch wie folgt darstellen:
)ˆ1()ˆ(1
ˆ
T
tj
T
LA
TT
tj
T
tj
R
TT
T
T
R
RLMLA
CeIR
RLeI
eIM
Ridt
diL
dt
diMuuuu
⋅⋅⋅+⋅+⋅⋅⋅+
⋅⋅⋅
=⋅−−=−−=
ωω
ωωω
ω
(2-11)
mit: ω: Kreisfrequenz [1/s]
TI : Amplitude des Stroms iT [A]
RI : Amplitude des Stroms iR [A]
In Abbildung 2-26 ist beispielhaft der Spannungsverlauf einer Transponderspule in
Abhängigkeit der Frequenz des magnetischen Wechselfeldes mit und ohne Parallel-
schwingkreis dargestellt.
2 Einführung in die Radiofrequenzidentifikation
47
uL
ff0
u0
Parallelschwingkreis mit hohem Gütefaktor
Parallelschwingkreis mit niedrigem Gütefaktor
Ohne Parallelschwingkreis
Verschiebung Transponder-
Resonanzfrequenz
Abbildung 2-26: Gegenüberstellung des Verlaufes der Lastspannung in Abhängigkeit der
Frequenz mit und ohne Parallelschwingkreis (f0 = Arbeitsfrequenz und
u0 = minimale Spannung zum Betrieb des Datenträgers)
Es zeigt sich, dass im Bereich der Resonanzfrequenz bei einem Parallelschwingkreis
eine deutliche Spannungsüberhöhung entsteht. Entfernt von der Resonanzfrequenz
erfährt der Schwingkreis eine erhebliche Dämpfung, so dass die Spannung stark ab-
sinkt.
Die Erhöhung der Spannung im Bereich der Resonanzfrequenz kann mit Hilfe des
Gütefaktors bewertet werden [FIN-06]:
T
T
LT
T
TC
L
RL
CR
Q
⋅+⋅=
1
1 (2-12)
mit: Q: Gütefaktor [-]
RT: Widerstand des Transponder-Schwingkreises [Ω]
RL: Lastwiderstand im Transponder [Ω]
Eine Erhöhung des Gütefaktors ist gleichzeitig mit einer Reduzierung der Bandbreite
verbunden. Die Bandbreite wird als der Betrag der Differenz der beiden Frequenzen
definiert, bei der die Spannung den 2
1-fachen Wert des Maximums erreicht [FIN-
06]. Eine Reduzierung der Bandbreite hat eine höhere Empfindlichkeit des
2 Einführung in die Radiofrequenzidentifikation
48
Transponders gegenüber dem Applikationsuntergrund und der Umgebung zur Folge.
Materialien in unmittelbarer Nähe zum mobilen Datenträger können je nach ihren
elektrischen Eigenschaften die Induktivität und Kapazität des Transponders und da-
mit seine Resonanzfrequenz verändern. Dies führt bei einem hohen Gütefaktor und
einer geringen Bandbreite dazu, dass schon bei einer geringen Verstimmung die in-
duzierte Spannung im Transponder stark gedämpft wird und nicht mehr zur Versor-
gung des Datenträgers ausreicht (vgl. Abbildung 2-26).
In der Auslegung eines Transponders muss aus diesem Grund immer ein Kompro-
miss zwischen Lesereichweite und Umgebungsempfindlichkeit in Kauf genommen
werden. Aufgrund der gegenseitigen Beeinflussung mehrerer Transponder wird in
der Praxis beispielsweise bei 13,56 MHz-Systemen die Resonanzfrequenz um bis zu
5 MHz höher gewählt, um die entstehende Schwingkreisverstimmung auszugleichen
[FIN-06]. Dies wiederum resultiert in geringeren Reichweiten bei der Einzellesung
von Transpondern.
Erfolgt die Energieübertragung nicht im Duplexverfahren − wie oben beschrieben −
sondern sequentiell, so muss zusätzlich zur Schaltung in Abbildung 2-25 ein Kon-
densator zur Speicherung der Energie im Transponder vorgesehen werden (vgl. Ka-
pitel 2.5). Als Vorteil können die sequentiellen Systeme, die nur durch die Ladezeit
und Kapazität des Ladekondensators beschränkt sind, mit leistungsfähigeren Mikro-
chips ausgestattet werden, wodurch sie überwiegend für Systeme mit Sicherheits-
funktionen für die Einzelerfassung eines Transponders eingesetzt werden. Durch den
komplexeren und kostenintensiveren Aufbau spielen sie hingegen für die Kennzeich-
nung von Gütern nur eine untergeordnete Rolle, weswegen sie hier nur ergänzend
erwähnt und im Folgenden vernachlässigt werden.
2.4.2.3 Funktionsprinzip der Datenübertragung
Jedes beliebige Zeichen lässt sich mit einer Kombination aus 0 und 1 darstellen be-
ziehungsweise codieren. Diese Art der Codierung wird im Rahmen der Elektro- und
Informationstechnik aufgrund der einfachen Abbildungsmöglichkeit durch zwei ver-
schiedene Zustände verwendet, um Daten zu speichern und zu übertragen. Die be-
2 Einführung in die Radiofrequenzidentifikation
49
kanntesten Codierungsarten von Zeichen sind dabei der ASCII30- und der UNI-
Code31.
Bei hoch- und niederfrequenten RFID-Systemen sind die Reader- und Transponder-
antenne über die Gegeninduktivität direkt gekoppelt. Dadurch führt eine Strom- bzw.
Spannungsänderung in einem System zu einer Rückwirkung auf das gekoppelte
System (vgl. Formel (2-11)). Dieses physikalische Prinzip ist neben der Energie-
auch die Grundlage für die Datenübertragung, bei der entweder Lastmodulation oder
subharmonische Verfahren zum Einsatz kommen. Bei der Lastmodulation lassen
sich zusätzlich die ohmsche und kapazitive Lastmodulation sowie die Lastmodulation
mit Hilfsträger unterscheiden.
Bei der ohmschen Lastmodulation wird ein Parallelwiderstand RMOD dem Schaltkreis
im Takt des Datenstromes zu- oder abgeschaltet, der nach Formel (2-12) zu einer
Veränderung des Gütefaktors führt, bedingt durch eine Verschiebung der Resonanz-
frequenz im eigenen System. Dies bewirkt eine Änderung der Spannung an der
Transponderspule, wodurch auf Basis der Gegeninduktivität die Spannungsamplitu-
de im gekoppelten System moduliert wird.
Auf dem identischen Prinzip beruht die kapazitive Modulation. Dabei wird ein parallel
geschalteter Kondensator zur Verschiebung der Resonanzfrequenz und Modellie-
rung der Spannungsamplitude im gekoppelten System verwendet. Im Gegensatz zur
ohmschen Modulation erfolgt dabei neben der Amplitudenmodulation auch eine Ver-
änderung der Phase im gekoppelten System.
Bei diesen beiden Lastmodulationsverfahren wird das Datensignal jeweils direkt auf
die Arbeitsfrequenz moduliert. Dadurch kommt es nur zu einer schwachen Verände-
rung der Spannung im Koppelsystem. Dies bedingt zur Detektion aufwendige Schal-
tungen im Reader. Das Verfahren ist hauptsächlich bei niederfrequenten Systemen
im Einsatz.
Die Datenübertragung mit Hilfe von Hilfsträgern beruht auf der ohmschen Lastmodu-
lation. Der Lastwiderstand wird mit einer sehr hoher Taktfrequenz fh zu- und abge-
30 American Standard Code for Information Interchange (ASCII) ist eine 7 Bit Codierung, die 128 Zei-
chen umfasst; u.a. das gesamte lateinische Alphabet und die arabischen Zahlen. 31 Der Uni-Code ist ein internationaler Standard, der geschaffen worden ist, um die Zeichen aller be-
kannten Schriftkulturen abzubilden.
2 Einführung in die Radiofrequenzidentifikation
50
schaltet, wodurch zwei Seitenbänder im Abstand ±fh zur Resonanzfrequenz entste-
hen (siehe Abbildung 2-27).
Durch Modulation mit Hilfe eines Widerstands können diese zur Signalübertragung
analog zur einfachen ohmschen Lastmodulation genutzt werden. Durch die Trennung
von der Arbeitsfrequenz des Systems kann das amplitudenmodulierte Signal durch
Filterung und Verstärkung am Lesegerät leicht getrennt werden (siehe Abbildung
2-28) und ermöglicht dadurch eine einfache Demodulierung des Signals [FIN-06].
Aufgrund der höheren benötigten Kanalbreite wird dieses Verfahren im Wesentlichen
von Systemen der Frequenz 13,56 MHz verwendet.
Abbildung 2-27: Entstehende Seitenbänder bei einer Lastmodulation mit Hilfsträger [FIN-06]
2 Einführung in die Radiofrequenzidentifikation
51
Abbildung 2-28: Signalübertragung mittels ASK-Modulation32 und Hilfsträger [FIN-06]
Eine weitere Möglichkeit der Datenübertragung stellen die subharmonischen Verfah-
ren dar, bei welchen eine subharmonische Frequenz erzeugt wird, indem das
Transponderanwortsignal nur in einen Teil der Transponderantenne eingespeist wird.
Die subharmonische Frequenz leitet sich dabei in Abhängigkeit des Einspeisungs-
punktes in die Antenne aus einer ganzzahligen Teilung der Arbeitsfrequenz ab. Die
Modulation erfolgt dann wiederum auf Basis der Lastmodulation.
Aufgrund der benötigten Bandbreite kann das Verfahren nur bei niederfrequenten
Systemen eingesetzt werden (vgl. Abbildung 2-13). Zudem ergibt sich durch die sehr
niedrige Frequenz der Subharmonischen lediglich eine geringe Leistungsfähigkeit,
wodurch sich das Verfahren im Regelfall nicht zur Kennzeichnung von Waren eignet.
Es wird deshalb an dieser Stelle hier nur ergänzend erwähnt und technisch nicht wei-
ter spezifiziert.
32 Die digitale Amplitudenmodulation wird auch als ASK (Amplitude-Shift Keying) bezeichnet.
2 Einführung in die Radiofrequenzidentifikation
52
2.4.3 Elektromagnetische Kopplung
Bei der elektromagnetischen Kopplung findet die Energie- und Datenübertragung im
Fernfeld des elektromagnetischen Wechselfeldes statt. Das Funktionsprinzip beruht
auf der Reflexion elektromagnetischer Wellen.
2.4.3.1 Entstehung einer elektromagnetischen Welle
Wie bereits in der Einführung in Kap 2.4 beschrieben, bildet sich durch ein magneti-
sches Wechselfeld auch ein elektrisches Feld aus, dass sich ab der Nah- / Fernfeld-
grenze als elektromagnetische Welle durch den Raum bewegt.
Im Folgenden wird die Entstehung einer elektromagnetischen Welle am Beispiel ei-
ner Dipolantenne33 erläutert.
Durch die Speisung einer Dipolantenne mit Wechselstrom werden die Enden des
Dipols oszillierend geladen, wodurch auf Basis des Induktionsgesetzes ein aufeinan-
der senkrecht stehendes magnetisches und elektrisches Feld entsteht (vgl.
Abbildung 2-29).
Abbildung 2-29: Aufladung einer elektrischen Dipolantenne bei Speisung mit Wechselstrom
(mit Umlaufdauer T) [TIP-94]
Durch die oszillierende Verschiebung der Ladungen im Dipol können die elektrischen
Feldlinien nach einer festen Zeiteinheit entsprechend Abbildung 2-30 nicht mehr auf
33 Ein elektrischer Dipol bezeichnet eine Anordnung zweier betragsmäßig gleicher Punktladungen
entgegengesetzter Polarität (Q,+Q) im Abstand d [DYC-07]. Eine Dipolantenne ist darauf aufbau-
end eine Antennenanordnung mit zwei gleichen, elektrisch leitenden Teilen.
2 Einführung in die Radiofrequenzidentifikation
53
dem Dipol enden, sondern schließen sich selbst und werden durch die entstehenden
Wirbel mit umgekehrtem Richtungssinn von der Antenne weg durch den Raum ge-
drängt, wodurch die elektromagnetische Welle entsteht.
Abbildung 2-30: Entstehung einer elektromagnetischen Welle am Beispiel einer Dipolantenne
[TIP-94]
2.4.3.2 Energieübertragung zwischen Reader und mobilen Datenträger
Physikalisch werden elektromagnetische Wellen im Raum vollständig durch die
Maxwellschen Gleichungen beschrieben:
2 Einführung in die Radiofrequenzidentifikation
54
t
EJB
t
BE
B
E
∂∂⋅+⋅=×∇
∂∂−=×∇
=⋅∇
=⋅∇
εµµ
ερ
)4(
)3(
0)2(
)1(
(2-13)
mit: E: Elektrisches Feld [V/m]
ρ: Raumladungsdichte [As/m³]
J: Stromdichte in leitenden Materialien [A/m²]
Aufgrund der Komplexität der Maxwellschen Gleichungen werden die Eigenschaften
eines elektromagnetischen Feldes im Folgenden auf Basis einer für das Verständnis
ausreichenden reinen Energiebetrachtung einer stationären Welle im verlustfreien
Medium erläutert. Für detailliertere Betrachtungen sei auf [KRK-06, LEH-06 und
MEI-92] verwiesen.
Mit einer elektromagnetischen Welle ist ein in Ausbreitungsrichtung wandernder Leis-
tungsfluss verbunden. Dieser wird ausgedrückt durch den Poynting-Vektor S, der
senkrecht auf den elektrischen und magnetischen Komponenten steht, und dessen
Betrag die Strahlungsdichte darstellt:
HES ×= (2-14)
mit S: Strahlungsdichte [W/m²]
Die Ausbreitungsgeschwindigkeit c, mit der sich die Welle im Raum bewegt ist defi-
niert durch
εµ ⋅
= 1c . (2-15)
mit: c: Ausbreitungsgeschwindigkeit der Welle [m/s]
Im Vakuum und annähernd in Luft ist die Ausbreitungsgeschwindigkeit somit gleich
der Lichtgeschwindigkeit.
Das elektrische und magnetische Feld ist im Vakuum gleichphasig (vgl. Abbildung
2-31). Das Verhältnis der beiden Feldstärken wird durch den Feldwellenwiderstand
ZF bestimmt und ergibt sich auf Basis der Formel (2-16) im freien Raum zu 377 Ohm.
0
0
εµ
==H
EZ F (2-16)
mit: ZF: Feldwellenwiderstand [Ω]
2 Einführung in die Radiofrequenzidentifikation
55
Abbildung 2-31: Elektromagnetische Welle [TIP-94]
Die abgestrahlte elektromagnetische Leistung einer beliebigen, geschlossenen Flä-
che wird durch die Strahlungsdichte integriert über die Fläche ausgedrückt:
∫∫=A
A AdSPrr
(2-17)
mit: PA: Abgestrahlte Leistung [W]
Betrachtet man in einem ersten Schritt die Sendeantenne als verlustfreien isotropen
Strahler, der die zugeführte Leistung gleichmäßig kugelförmig in den Raum abstrahlt,
so muss die abgestrahlte Leistung P durch die Oberfläche A = 4πx² abgestrahlt wer-
den. Dadurch ergibt sich die Strahlungsdichte S in einer Entfernung x zur Quelle zu
²4 x
PS A
⋅⋅=
π (2-18)
mit: x: Entfernung zur Strahlungsquelle [m]
Für die elektrische Feldstärke in einer Entfernung x gilt unter zu Hilfenahme der For-
meln (2-14) bis (2-18):
²4 x
ZPZSE FA
F ⋅⋅⋅=⋅=
π (2-19)
Die magnetische Feldstärke in der Entfernung x lässt sich auf Basis der obigen For-
meln analog berechnen.
Die elektrische Feldstärke nimmt also im Fernfeld proportional zu 1/x ab, während
der Verlauf im Nahfeld der Beziehung 1/x³ folgt (vgl. Formel (2-3)). Im Fernfeld tritt
somit eine Abflachung des Dämpfungsverlaufs ein.
Wird nun statt eines isotropen Strahlers eine Dipolantenne verwendet, erfolgt die Ab-
strahlung nicht mehr gleichmäßig in alle Raumrichtungen, sondern gerichtet. Um
Formel (2-17) zu erfüllen, muss daher die Strahlungsdichte in Vorzugsrichtung grö-
ßer sein als bei einem isotropen Strahler. Zur Beschreibung der Strahlungsdichte S
2 Einführung in die Radiofrequenzidentifikation
56
in Abhängigkeit der Richtung wird der Richtvektor G(Θ) eingeführt, der die relative
Strahlungsdichte in Richtung des Vektors anzeigt und bei verlustfreien Antennen den
Antennengewinn der Sendeleistung im Vergleich zu einem Isotropenstrahler darstellt
(siehe Abbildung 2-32)34.
A
Abbildung 2-32: Strahlungsdiagramm einer Dipolantenne im Vergleich zu einem isotropen
Strahler [FIN-06]
Der Antennengewinn in Hauptstrahlrichtung GA für verschiedene Antennen-
bauformen ist in Tabelle 2-3 dargestellt.
Tabelle 2-3: Gewinn in Hauptstrahlrichtung bei verschiedenen Antennenformen (in Anlehnung
an [FIN-06])
Gewinn GA
Isotropenstrahler 1
Dipolantenne 1,64
Patchantenne ~ 3
34 Die Annäherung einer verlustfreien Antenne ist in den meisten Fällen der Praxis zulässig
2 Einführung in die Radiofrequenzidentifikation
57
Die abgestrahlte Leistung ergibt in der Hauptstrahlrichtung aus dem Produkt zwi-
schen eingespeister Leistung und Antennengewinn und wird auch als PEIRP (Equiva-
lent Isotropic Radiated Power) bezeichnet35.
AEEIRPA GPPP ⋅== (2-20)
mit: PE: Eingespeiste Leistung [W]
GA: Antennengewinn in Hauptstrahlrichtung [-]
Wird eine Empfangsantenne in das elektromagnetische Feld eingebracht, so wirkt
auf Basis des Gesetzes von Coulomb eine Kraft auf die Elektronen in der Antenne
(vgl. Abbildung 2-31). Die dadurch verursachte Bewegung der Elektronen resultiert
aufgrund der Ladungstrennung in einer Spannung in der Antenne. Durch das oszillie-
rende elektromagnetische Feld wird also eine Wechselspannung in der Empfangsan-
tenne induziert.
Die maximal entnehmbare Leistung einer Empfangsantenne bei optimaler Orientie-
rung ist dabei proportional zur Leistungsdichte der einfallenden Wellen. Der Proporti-
onalitätsfaktor hat die Dimension einer Fläche und wird als wirksame Fläche oder
effektive Antennenfläche bezeichnet.
²4 x
APASP eA
eT ⋅⋅⋅
=⋅=π
(2-21)
mit: PT: Empfangsleistung [W]
Ae: Wirksame Fläche [m²]
Die effektive Antennenfläche Ae muss nicht der geometrischen Fläche A entspre-
chen. Insbesondere im Falle von Drahtantennen sind die beiden Größen unter-
schiedlich (vgl. Abbildung 2-33). Das Verhältnis aus den beiden Größen bezeichnet
man als Apertureffizienz ηa, so dass gilt [KAE-05]:
gae AA ⋅=η (2-22)
mit: Ag: Geometrische Fläche der Antenne [m²]
35 Neben EIRP ist im Rahmen von Funkvorschriften die effektive Strahlungsleistung ERP (effective
radiated power, auch equivalent radiated power) von Bedeutung. Sie gibt die effektive Strahlungs-
leistung in Watt (W) an, die im Vergleich zu einer Dipolantenne abgestrahlt wird.
2 Einführung in die Radiofrequenzidentifikation
58
Abbildung 2-33: Prinzipielle (a) und tatsächliche Gestalt (b) der wirksamen Fläche für elektrisch
kurze Dipole mit Höhe h [MEI-92]
Aus den obigen Formeln ergibt sich, dass die Lage der Empfangsantenne zur elekt-
romagnetischen Welle einen hohen Einfluss auf die aufzunehmende Leistung hat.
Die Richtung des elektrischen Feldes der ausgestrahlten elektromagnetischen Welle
wird dabei über die Polarisation der Antenne bestimmt. Unterschieden werden die
lineare und zirkulare Polarisation. Bei der linearen Polarisation ist die Richtung der
elektromagnetischen Feldstärken konstant, bei der zirkularen Polarisation hingegen
rotiert der Feldstärkenvektor senkrecht zur Ausbreitungsrichtung. Am Beispiel von
Dipolantennen sind die Polarisationsformen in Abbildung 2-34 dargestellt.
Abbildung 2-34: Lineare −−−− a) und b) −−−− und zirkulare Polarisation am Beispiel eines
Dipols [FIN-06]
2 Einführung in die Radiofrequenzidentifikation
59
Ist die Sendeantenne linear polarisiert, so kann die optimale Leistung nur aufge-
nommen und eine hohe Spannung induziert werden, wenn die Polarisation der bei-
den Antennen identisch ist. Falls die Polarisationen um 90° oder 270° gedreht sind,
ergibt sich ein Minimum in der Leistungsaufnahme, was zu einem Polarisationsver-
lust von ca. 20 dB führt. Das heißt, dass nur noch etwa 1/100 der Leistung aufge-
nommen werden kann. Liegt die Antenne waagrecht rechtwinklig zur Sendeantenne,
so kann keine Lesung erfolgen (vgl. Abbildung 2-35).
Polarisation der Antenne
UHF-Radiowelle
UHF-Etikett waagerecht, parallel zur Antenne: optimale Lesung
UHF-Etikett senkrecht, recht-winklig zur Antenne: suboptimale Lesung
UHF-Etikett waagrecht, recht-winklig zur Antenne: keine Lesung
UHF-Etikett senkrecht, parallel zur Antenne: suboptimale Lesung
Abbildung 2-35: Auswirkung der Antennenpolarisation auf die Lesbarkeit [KLE-04]
Da bei RFID-Anwedungen die Lage der Sende- und Empfangsantenne zueinander in
der Regel unbestimmt ist, kommen hauptsächlich zirkular polarisierte Sendeanten-
nen zum Einsatz, wodurch eine zuverlässige Lesbarkeit erreicht werden kann. Im
Vergleich zu linear polarisierten Sendeantennen ist unabhängig von der Polarisation
der Empfangsantenne mit einem Verlust von etwa 3 dB zu rechnen [FIN-06].
Neben der Polarisation beeinflusst die Fläche der Empfangsantenne, gekoppelt mit
der geometrische Ausgestaltung und dem damit verbundenen Antennengewinn, in
hohem Maße die vom Transponder aufnehmbare Leistung.
Durch Einsetzen der Formel (2-21) in Formel (2-20) ergibt sich für die maximale ver-
fügbare Wirkleistung am Transponder, falls Transponder- und Sendeantenne bezüg-
lich ihrer Richtcharakteristik und Polarisation optimal ausgerichtet sind, folgende
Beziehung:
2 Einführung in die Radiofrequenzidentifikation
60
22
2
16 x
GGPP TAE
W ⋅⋅⋅⋅⋅=
πλ
(2-23)
mit: PW: Wirkleistung am Transponder [W]
GT: Gewinn der Transponderantenne [-]
Diese Gleichung wird auch als Friissche Transmissionsgleichung bezeichnet. Der
Faktor 2)4
(x⋅⋅π
λ, der die Dämpfung im Vakuum – und annähernd auch in Luft – wi-
derspiegelt, stellt die Freiraumdämpfung dar. Zur Übertragung auf andere Medien
zwischen Transponder- und Sendeantenne muss die Gleichung zusätzlich mit einem
Dämpfungsterm xe
α2− ergänzt werden. Der Absorptionskoeffizient α hängt dabei von
der Permeabilität und der Permittivität der zu durchdringenden Materie ab und ist
frequenzabhängig.
Setzt man für die Leistungsaufnahme eines modernen Transpondermikrochips einen
Wert von 5 µW [FRI-01] und einen Wirkungsgrad der Schaltungen von 10 % voraus,
so ergibt sich auf Basis der Formel (2-24) bei einer Sendeleistung von 2 W und einer
maximalen Leistungsaufnahme unter Verwendung eines Dipols als Empfangsanten-
ne folgende maximale theoretische Lesereichweite bei passiven Systemen:
mP
GPx
W
TA 716 2
2
max ≈⋅⋅⋅⋅=π
λ (2-24)
Aufgrund der leichten Dämpfung in der Atmosphäre und der Reflexion eines Teils der
elektromagnetischen Strahlung fällt die maximal erreichbare Lesereichweite bei
RFID-Systemen in der Praxis etwas geringer aus. Die atmosphärische Dämpfung
steigt mit der Frequenz, so dass die Reichweite von SHF-Systemen im Vergleich zu
UHF-Systemen niedriger ist (vgl. Abbildung 2-36).
2 Einführung in die Radiofrequenzidentifikation
61
Abbildung 2-36: Dämpfung in der Atmosphäre als Funktion über die Frequenz [CUR-87]
2.4.3.3 Funktionsprinzip der Datenübertragung
Aus der Radar-Technik36 ist bekannt, dass elektromagnetische Wellen von Objekten
im Raum reflektiert werden [FIN-06]. Die an einem Objekt ankommende Feldenergie
wird somit abhängig von den Materialeigenschaften des Objektes anteilsmäßig zu-
rück gespiegelt, im Objekt absorbiert oder transmittiert das Objekt.
Der Anteil der reflektierten Energie hängt von den Reflexionseigenschaften des Ob-
jekts ab und wird insbesondere von
• der Geometrie,
• den Materialeigenschaften und
• der Oberflächenstruktur
sowie von
• der Sendefrequenz und
• der Polarisation der elektromagnetischen Welle
36 Die Abkürzung RADAR bedeutete ursprünglich Radio Aircraft Detection and Ranging. Aufgrund der
vielfältigen Einsatzgebiete steht heute RADAR allgemein für Radio Detection and Ranging
[HUD-99].
2 Einführung in die Radiofrequenzidentifikation
62
bestimmt [HUD-99].
Die Reflexion an Objekten steigt dabei mit der Höhe der Frequenz und ist stark ab-
hängig von den Abmessungen des Objektes im Verhältnis zur Wellenlänge und dem
Material. Insbesondere metallische Objekte weisen eine sehr hohe Reflexion auf.
Bei RFID-Systemen wird das Prinzip der Reflexion elektromagnetischer Wellen zur
Datenübertragung genutzt, indem die Reflexionseigenschaft der Transponder-
antenne datenabhängig verändert wird. Das Verfahren wird als Backscatter-
Verfahren oder modulierter Rückstrahlquerschnitt bezeichnet.
Die von der Transponderantenne reflektierte Leistung ist proportional zur Strah-
lungsdichte. Die Proportionalitätskonstante wird als Rückstrahlquerschnitt σ37 be-
zeichnet und hat die Dimension m². Die reflektierte beziehungsweise rückgestrahlte
Leistung ergibt sich auf Basis der Formel (2-17) zu
σ⋅= SPB . (2-25)
mit: PB: Rückgestrahlte Leistung [W]
σ: Rückstrahlquerschnitt [m²]
Zur Bestimmung der reflektierten Leistung und Erläuterung der Datenübertragung
müssen zunächst die Transponderantenne und die Schaltungen des Transponders
näher betrachtet werden.
Eine Antenne wird maßgeblich durch ihre Eingangsimpedanz38 ZA bestimmt, die sich
aus drei Widerständen zusammensetzt. Der Strahlungswiderstand Rr spiegelt den
ungenutzt reflektierten Anteil der Leistung wider und beträgt beispielsweise bei ei-
nem typischen λ/2-Dipol 73 Ω [FIN-06]. Der Verlustwiderstand Rv berücksichtigt die
an der Antenne und ihren Leitungen in Wärme umgewandelte Leistung. Der komple-
xe Widerstand XA kalkuliert die Frequenzabhängigkeit mit ein. Er wird auf der Reso-
nanzfrequenz der Antenne zu Null.
37 Der Rückstreuquerschnitt wird synonym auch als Radarquerschnitt, Rückstreufläche oder Rück-
strahlfläche bezeichnet. 38 Impedanz (Scheinwiderstand) ist ein elektrischer Widerstand, der das Verhältnis der Amplituden
beziehungsweise Effektivwerte von Strom und Spannung eines Zweipols bei Wechselstrom kenn-
zeichnet. Zwischen Strom und Spannung besteht eine Phasenverschiebung, die durch induktive und
kapazitive Komponenten des Zweipols entsteht. Diese bewirken, dass der Wechselstromwiderstand
in der Regel frequenzabhängig ist [MEY-07]
2 Einführung in die Radiofrequenzidentifikation
63
Dies hat zur Konsequenz, dass sowohl der Anteil der reflektierten Leistung als auch
die aufgenommene Leistung stark von der Abstimmung der Antenne auf die Sende-
frequenz abhängt (vgl. Kapitel 2.4.3.2). Der Mikrochip und die Schaltungen des
Transponders können durch einen Wirkwiderstand RT und einen komplexen Wider-
stand XT beschrieben werden.
Dadurch ergibt sich das Ersatzschaltbild eines Transponders entsprechend der
Abbildung 2-37.
Abbildung 2-37: Ersatzschaltbild eines Transponders und dessen Antenne [FIN-06]
Die reflektierte Leistung, die der Strahlungswiderstand Rr repräsentiert, lässt sich auf
Basis des Ersatzschaltbildes wie folgt berechnen:
r
TATvr
o
rTB RXXRRR
URIP ⋅
++++=⋅=
22
2
2
)()( (2-26)
mit: IT: Stromfluss im Transponder [A]
Rr: Strahlungswiderstand [Ω]
U0: Induzierte Spannung [V]
Rv: Antennenverlustwiderstand [Ω]
RT: Transponderwirkwiderstand [Ω]
XA: Komplexer Antennenwiderstand [Ω]
XT: Komplexer Transponderwiderstand [Ω]
Die induzierte Spannung kann nach [FIN-06] für eine Antenne, die in Leistungsan-
passung (RT = Rr) betrieben wird, über die Wellenlänge durch die Gleichung
π
λ SRGU rT ⋅⋅
⋅=0 (2-27)
ausgedrückt werden.
2 Einführung in die Radiofrequenzidentifikation
64
Durch Verknüpfung der Formeln (2-26) bis (2-28) ergibt sich für den Rückstrahlquer-
schnitt σ der folgende Zusammenhang:
22
2
)()2( TATr
Tr
XXRR
GR
+++⋅⋅⋅⋅
=π
λσ (2-28)
Die Formel (2-27) und (2-28) zeigen die Abhängigkeit der zurückgestrahlten Leistung
beziehungsweise des Rückstrahlquerschnitts von der Impedanz ZT (= RT + XT) des
Transponders.
Durch die datenabhängige Zuschaltung einer Modulierungs-Impedanz Zmod kann s
auf Basis der Änderung der Transponderimpedanz das Rückstrahlverhalten der
Transponderantenne beeinflusst werden. Die Veränderung des Rückstrahlquer-
schnitts verursacht eine Modifikation der reflektierten Leistung, die am Lesegerät de-
tektiert werden kann. Die Impedanzveränderung kann durch einen zusätzlichen
Widerstand oder einer Kapazität erfolgen, analog den induktiven Systemen. Durch
die Umtastung des imaginären Anteils der Transponderimpedanz wird zusätzlich
auch die Phase verändert, so dass die Modulation der Daten über den Betrag der
reflektierten Leistung und dessen Phase erfolgt (siehe Abbildung 2-38) [FIN-06].
Abbildung 2-38: Datenübertragung durch Modulierung des Rückstrahlquerschnitt bei elektro-
magnetisch gekoppelten Systemen [FIN-06]
Der Rückstrahlquerschnitt kann theoretisch Werte zwischen zwei Grenzfällen an-
nehmen. Eine sehr hohe Modulierungsimpedanz bewirkt, dass die Transponderim-
pedanz gegen ∞ strebt und somit der Rückstrahlquerschnitt gegen Null läuft. Der
zweite Extremfall ist der Kurzschluss des Transponders, so dass ZT gegen Null strebt
und der Rückstrahlquerschnitt mit XA = XT = 0 den Maximalwert annimmt.
2 Einführung in die Radiofrequenzidentifikation
65
Die zurückgestrahlte Leistung erzeugt in der Readerantenne auf Basis der dargeleg-
ten Grundlagen in Kapitel 2.4.3.2 eine Spannung, durch deren Auswertung die Daten
im Lesegerät zurückcodiert werden können.
Bei elektromagnetisch gekoppelten Systemen kommen generell Duplexverfahren
zum Einsatz, eine Ausnahme bilden die Oberflächenwellensysteme, die später im
Abschnitt erläutert werden. Durch die zur Datenübertragung notwendige stetige
Energieübertragung muss daher die Datenübertragung auf einem Seitenband erfol-
gen, analog den Duplexverfahren bei induktiv gekoppelten Systemen.
Neben der oben geschilderten Datenübertragung, die im Regelfall bei passiven UHF-
Systemen und bei aktiven UHF- und SHF-Systemen zum Einsatz kommt, existieren
darüber hinaus RFID-Systeme, die mit Hilfe von Oberflächenwellen arbeiten. Diese
werden überwiegend im passiven SHF-Frequenzbereich eingesetzt.
Das grundlegende Funktionsprinzip dieser Systeme ist die Entstehung von akusti-
schen Oberflächenwellen39 durch eine Spannung an den Elektroden eines Piezo-
Kristalls. Die gespeicherte Information wird bei dieser Art von RFID-Systemen auf
dem mobilen Datenträger mit einem piezoelektrischen Substrat mittels planarer
Elektrodenstrukturen realisierten Reflektoren [KOL-00] codiert. Der Aufbau eines
Oberflächentransponders ist schematisch in Abbildung 2-39 dargestellt.
Radio-
wellen
Interdigital-
wandler
Reflektierte
Oberflächen-wellen
Reflektierte
Oberflächen-wellenInterdigital-
wandler
Reflektierte
Oberflächen-wellenInterdigital-
wandler
Reflektierte
Oberflächen-wellen
Radio-
wellen
Interdigital-
wandler
Radio-
wellen
Reflektierte
Oberflächen-wellenInterdigital-
wandler
Radio-
wellen
Radio-
wellen
Interdigital-
wandler
Radio-
wellen
Reflektierte
Oberflächen-wellenInterdigital-
wandler
Radio-
wellen
Reflektierte
Oberflächen-
wellen
Interdigital-
wandler
Radio-
wellen
Radio-
wellen
Interdigital-
wandler
Radio-
wellen
Reflektierte
Oberflächen-
wellen
Interdigital-
wandler
Radio-
wellen
Reflektierte
Oberflächen-
wellenInterdigital-
wandler
Radio-
wellen
Transponder-
antenne
Reflektierte
Oberflächen-
wellenInterdigital-
wandler
Reflektierte
Oberflächen-
wellenInterdigital-
wandler
Reflektierte
Oberflächen-
wellen
Radio-
wellen
Interdigital-
wandler
Reflektierte
Oberflächen-
wellen
Abbildung 2-39: Aufbau eines Oberflächenwellentransponders [RFS-08]
Die an der Transponderantenne analog zu den Duplex-Systemen induzierte Span-
nung erzeugt am Interdigitalwandler40 auf Basis des piezoelektrischen Effekts eine
Oberflächenwelle, die sich entlang des Substrats ausbreitet. Die Oberflächenwelle
39 Wird im Englischen auch als surface accoustic wave (SAW) bezeichnet. 40 Der Interdigitalwandler wandelt die Radiowellen in Oberflächenwellen um und umgekehrt.
2 Einführung in die Radiofrequenzidentifikation
66
wird an den einzelnen Reflektoren zu einem geringen Anteil reflektiert und läuft zum
Interdigitalwandler zurück. Dort verursacht die reflektierte Oberflächenwelle einen
elektrischen Impuls, der mittels einer Antenne abgestrahlt wird. Der zeitliche Abstand
zwischen den einzelnen Impulsen ist proportional zu den räumlichen Abständen der
Reflektoren auf dem Substrat, so dass durch deren räumliche Anordnung eine binäre
Ziffernfolge codiert werden kann [KOL-00]. Am Ende des Substrats wird der ankom-
mende Anteil der Oberflächenwelle absorbiert.
Die Ausbreitungsgeschwindigkeit liegt bei gebräuchlichen Substraten zwischen 3000
und 4000 m/s [FIN-06] und damit deutlich unter der Lichtgeschwindigkeit der elekt-
romagnetischen Welle. Dies hat zur Konsequenz, dass der erste Impuls erst nach
einer Totzeit größer einer Millisekunde bei der Readerantenne ankommt. Dadurch
sind Störungen und Reflexionen aus der Umgebung bereits abgeklungen [DZI-97].
Die Datenübertragung erfolgt somit sequentiell zur Energieübertragung.
Bei diesen Systemen besteht darüber hinaus die Möglichkeit neben der Speicherung
von Daten den Transponder gleichzeitig als Sensor zu nutzen. Da sich Oberflächen-
wellen in Abhängigkeit von Druck und Temperatur mit unterschiedlicher Geschwin-
digkeit ausbreiten, kann durch Abgleich des tatsächlichen Zeitbedarfs bis zur
Widerankunft der reflektieren Oberflächenwellen am Interdigitalwandler mit Refe-
renzwerten eine Veränderung dieser Parameter gemessen werden.
Die Datenspeicherung hingegen ist bei Oberflächenwellen stark begrenzt und kann
durch die direkte Kodierung auf dem Substrat nicht verändert werden. Es handelt
sich hierbei also stets um Read-Only Systeme.
2.5 Eigenschaften von RFID-Systemen
Aufbauend auf die physikalischen Funktionsprinzipien werden im Folgenden die Ei-
genschaften von RFID-Systemen in Abhängigkeit der Arbeitsfrequenz zusammenge-
fasst.
2.5.1 Feldcharakteristik
Die physikalischen Funktionsprinzipien bedingen grundsätzlich unterschiedliche
Feldcharakteristiken. Während bei Nahfeld-gekoppelten aufgrund der direkten Kopp-
lung ein definiertes Lesefeld um die Sendeantenne entsteht, wird bei Fernfeldsyste-
men das elektromagnetische Feld durch Leselöcher zerklüftet. Diese entstehen
durch Reflexion von elektromagnetischen Wellen an Gegenständen im Raum, die
2 Einführung in die Radiofrequenzidentifikation
67
größer als die Wellenlänge sind (vgl. Rückstrahlquerschnitt im Kap 2.4.3.3). Die re-
flektierten Wellen überlagern sich und interferieren untereinander sowie mit den ab-
gestrahlten Wellen. Je nach Phasenlage der überlagerten Wellen kommt es zu
lokaler Dämpfung, bis zur Auslöschung bei gegenphasiger Überlagerung oder zur
Verstärkung bei gleichphasiger Überlagerung. Das Lesefeld von Fernfeld-
gekoppelten Systemen ist dadurch durch Leselöcher im theoretischen Lesebereich
und Lesefelder außerhalb dieser Lesezone gekennzeichnet.
In Abbildung 2-40 wird die theoretische Feldcharakteristik eines HF- mit einem UHF-
System verglichen, während in Abbildung 2-41 beispielhaft die Auswirkung von Re-
flexionen am Beispiel der Bodenreflexion auf ein UHF-RFID-System dargestellt ist.
Abbildung 2-40: Vergleich der Feldcharakteristik von HF- und UHF-Systemen [WAL-05]
2 Einführung in die Radiofrequenzidentifikation
68
A
B
Abbildung 2-41: Elektromagnetisches Feld ohne (A) und mit Einfluss (B) der Bodenreflexion
bei UHF-Systemen [WAL-05]
Die Umgebungsabhängigkeit des Lesefeldes bei elektromagnetisch gekoppelten
Systemen bedingt, dass der tatsächliche Lesebereich nur für eine definierte konstan-
te Situation berechen- und vorhersagbar ist. Dies führt in der Praxis oft zu einer auf-
wendigeren Pilot- und Implementierungsphase bei UHF-Systemen, um das Lesefeld
auf die Umgebung und die gekennzeichneten Materialien anzupassen.
2.5.2 Reichweite
Die Reichweite von RFID-Systemen ist geprägt durch das physikalische Kopplungs-
prinzip. Induktiv gekoppelte Systeme arbeiten im Nahfeld der Antenne, so dass sich
bei passiven Systemen Reichweiten bis zu 1,7 m im HF-Bereich realisieren lassen.
Bedingt durch ihre niedrige Frequenz und die damit verbundene geringe Leistungs-
fähigkeit werden LF-Systeme überwiegend im close-coupling Bereich eingesetzt, de-
ren Reichweite im Normalfall unter 0,2 m beträgt. Durch eine entsprechend große
Gestaltung der Transponder (vgl. Formel (2-7)) können aber auch Reichweiten ver-
2 Einführung in die Radiofrequenzidentifikation
69
gleichbar mit HF-Systemen realisiert werden. Aufgrund der niedrigen Datenrate und
der mangelnden Pulkfähigkeit gibt es hierfür kaum Anwendungsfälle in der Praxis.
Auf Basis der Formel (2-25) lassen sich bei den Fernfeld-gekoppelten passiven UHF-
Systemen theoretisch bis circa 7 Meter Reichweite realisieren. Bedingt durch die at-
mosphärische Dämpfung und die Reflexion eines Teils der ankommenden Leistung
sind in der Praxis Reichweiten von bis zu 5 m zu verwirklichen. Bei passiven SHF-
Systemen sinkt die zu erwartende Reichweite aufgrund der höheren Dämpfung in
Luft entsprechend Abbildung 2-36 auf 3 bis 4 m.
Bei aktiven Systemen müssen die Transponder nur aktiviert und nicht mit Energie
versorgt werden, weswegen sich dort deutlich höhere Reichweiten erzielen lassen.
Bei UHF-Systemen können im Idealfall bis zu 100 m erreicht werden. SHF-Systeme
bieten im freien Feld teilweise Reichweiten bis zu 300 m.
Die tatsächliche Lesereichweite, insbesondere von passiven RFID-Systemen, hängt
sehr stark von der Antennengröße, der Umgebung, dem Applikationsuntergrund und
der Lage des Transponders zum Lesegerät - speziell bei induktiven Systemen – ab.
Aus diesem Grund können Reichweiten nur abschätzend angegeben werden und
stellen nur grobe Richtwerte für tatsächlich in einer Anwendung erzielbare Reichwei-
ten dar.
Eine direkte Übertragung von theoretischen und im Labor gemessenen Werten auf in
der Praxis zu erwartende Reichweiten ist dadurch nur bedingt beziehungsweise nur
durch aufwändige Testszenarien möglich.
Zusammenfassend hängt die Reichweite eines RFID-Systems in Anlehnung an
[LAM-05] von folgenden Faktoren ab:
• Sendefrequenz des Lesegerätes
• Energieverbrauch des Transponders
• Qualität und Wirkungsgrad der Verbindung zwischen Mikrochip und
Antenne des mobilen Datenspeichers
• Größe, Form und Qualität der Transponderantenne
• Orientierung der Antenne des Tags zur Sendeantenne
• Design der Transponderantenne
• Empfindlichkeit des Lesegerätes
• Sendeleistung des Lesegerätes
• Umgebungsbedingungen
2 Einführung in die Radiofrequenzidentifikation
70
• Applikationsuntergrund des Transponders bzw. die Abstimmung des
Transponders auf den Applikationsuntergrund
• Anfälligkeit gegenüber anderen Funk-Signalquellen
2.5.3 Baugröße
Die Baugröße von Transpondern wird neben der Energieversorgung hauptsächlich
von der Antenne bestimmt, die auf die jeweilige Frequenz abgestimmt sein muss. Die
Länge einer Dipolantenne muss beispielsweise mindestens ¼ der Wellenlänge auf-
weisen, um einen Schwingungsbauch aufnehmen zu können.
Aus diesem Grund besteht bei elektromagnetisch gekoppelte Systeme bezogen auf
die Reichweite ein direkter Zusammenhang zwischen der Transpondergröße und der
Frequenz.
Bei induktiv gekoppelten Systemen ist frequenzunabhängig die Fläche der
Transponderantenne für die erzielbare Lesereichweite verantwortlich. Darüber hin-
aus kann durch die Anzahl der Windungen oder durch die Permeabilität die
Transpondergröße dieser Systeme beeinflusst werden. Speziell im LF-Bereich exis-
tieren im Bereich bei Glasröhrchentranspondern sehr kompakte Bauformen, die sich
durch sehr kleine Windungen und einem zusätzlichen Eisenkern realisieren lassen.
Dies sind Systeme, die durch geringe Reichweiten von wenigen Zentimetern ge-
kennzeichnet sind.
Generell lassen sich elektromagnetisch gekoppelte Systeme durch die einfachere
Antennenform in verschiedensten Bauformen realisieren, während bei induktiv ge-
koppelten Systemen immer eine Spule- oder Leiterschleife notwendig ist.
2.5.4 Datenübertragungsrate
Die Datenübertragung erfolgt bei RFID-Systemen im Regelfall über eine Modulation
des Trägersignals oder einem frequenznahen Hilfsträger. Aus diesem Grund ergibt
sich ein direkter Zusammenhang zwischen der Frequenz und der Datenübertra-
gungsrate. Je höher die Frequenz, desto höher auch der mögliche Informationstrans-
fer pro Sekunde. Bei HF-Systemen können nach [JAN-04] und [LAM-05] bis zu
100 kBit/s übertragen werden, während sich nach [EPC-05] bei UHF-Systemen theo-
retisch bis zu 640 kBit/s realisieren lassen. Aufgrund des Bandbreitenbedarfs und der
Anzahl der Datencodierungsmöglichkeiten sind bei UHF-Systemen in der Praxis aber
2 Einführung in die Radiofrequenzidentifikation
71
effektive Datenraten zu erreichen, die um einen Faktor 2, 4 oder 8 niedriger liegen
[EPC-05]. Dies ist bei HF-Systemen in der Praxis in ähnlicher Form zu erwarten.
2.5.5 Pulkfähigkeit
Eine wesentliche Eigenschaft von RFID-Systemen ist das nahezu gleichzeitige Aus-
lesen von mehreren Transpondern im Ansprechfeld. Dabei werden die Transponder
nicht parallel, sondern sequentiell hintereinander unter Zuhilfenahme von Vielfach-
zugriffsverfahren einzeln angesprochen.
In der Funktechnik sind dabei Raummultiplex (SDMA), Zeitmultiplex (TDMA), Fre-
quenzmultiplex (FDMA) und Codemultiplex (CDMA) als Vielfachzugriffsverfahren be-
kannt. Aufgrund der beschränkten Leistungsfähigkeit von RFID-Transpondern und
der Forderung nach günstiger Herstellung kommen bei RFID-Systemen hauptsäch-
lich TDMA und seltener FDMA (bzw. eine Kombination aus beiden Varianten) zum
Einsatz. Die technische Realisierung eines solchen Vielfachzugriffsverfahrens wird
als Antikollisionsverfahren bezeichnet, wobei sich zwei Klassen unterscheiden las-
sen: deterministische und probabilistische Verfahren [SWE-02].
2.5.5.1 Deterministische Verfahren
Bei den deterministischen Verfahren sucht das Lesegerät alle Transponder im Lese-
bereich an Hand ihrer eindeutigen Seriennummer. Der Baumtraversierungs-
algorithmus (Binary-Tree-Verfahren) ist hierbei das meist eingesetzte Verfahren.
Dabei wird der Binärbaum aller möglichen dual codierten Seriennummern systema-
tisch durchlaufen. Bei jedem Anfrageschritt werden alle Transponder aufgefordert zu
antworten, deren Seriennummer mit einer bestimmten Kombination von Nullen und
Einsen beginnt. Antworten mehrere Transponder, wird eine weitere Stelle festgelegt.
Dieser Schritt wird solange wiederholt, bis nur noch ein Transponder antwortet (vgl.
Abbildung 2-42) und dieser gezielt angesprochen werden kann. Der deterministische
Antikollisionsalgorithmus stellt somit sicher, dass nach einer gewissen Zeit alle
Transponder im Bereich des Lesegerätes erkannt werden. Jedoch benötigt der
Baumtraversierungsalgorithmus eine hohe Datenübertragungsrate, um in kurzer Zeit
eine möglichst hohe Erkennungsrate zu gewährleisten [FIN-06, LAM-05].
2 Einführung in die Radiofrequenzidentifikation
72
Abbildung 2-42: Funktionsweise des Binary-Tree-Verfahrens
2.5.5.2 Probabilistische Verfahren
Bei den probabilistischen Verfahren antworten die Transponder zu einem beliebigen
Zeitpunkt. Hier wird meist eine Variante des ALOHA-Algorithmus angewandt, bei
dem das Lesegerät den Transpondern ein Zeitfenster zum Senden bereitstellt. Beim
Framed-Slotted-ALOHA-Algorithmus ist dieses Zeitfenster in eine bestimmte Anzahl
von Zeitslots eingeteilt, aus denen jeder Transponder zufällig einen für seine Antwort
auswählt. Falls mehrere Transponder im gleichen Zeitslot senden, kommt es zur Kol-
lision. Dies kann nicht verhindert werden, da die Transponder nicht wissen, ob weite-
rere Transponder gleichzeitig Signale übermitteln. Kommt es in allen Zeitslots zu
Kollisionen und kann somit kein Datenträger direkt erkannt werden, wird die Anzahl
der Slots kontinuierlich erhöht. Erfolgreich erkannte Transponder werden für die fol-
genden Runden stumm geschaltet, damit sich die Anzahl der Kollisionen verringert.
Bei der Wahl der Slotanzahl und der Länge der Zeitfenster muss die erwartete An-
zahl der Transponder mit einbezogen werden, da bei zu kleinem Zeitfenster die not-
wendigen Anfragerunden zur Erkennung aller Transponder stark ansteigt und bei zu
großem Zeitfenster die Systemleistungsfähigkeit durch lange Antwortwartezeiten
stark reduziert wird. Bei probabilistischen Antikollisionsalgorithmen ist nicht gewähr-
leistet, dass alle Transponder nach einer festen Zeit erkannt werden. [FIN-06], [LAM-
05]
Um generell eine gute Pulklesefähigkeit zu gewährleisten, ist unabhängig vom Ver-
fahren eine hohe Datenübertragungsrate notwendig. Bei HF-Systemen können nach
[JAN-04] theoretisch bis zu 100 Transpondern pro Sekunde gelesen werden, wäh-
rend der theoretische Wert bei UHF-Systemen bei 500 Transponder pro Sekunde
liegt. In Abhängigkeit der Readereinstellungen, beispielsweise der Zeitslots beim
ALOHA-Verfahren, und der Anzahl der stochastischen Kollisionen sowie der Leselö-
Algorithmusbeginn: 10xxxxxxxxx à mehrere Transponder antworten
Weitere Ziffer wird festgelegt: 101xxxxxxxx à mehrere Transponder antworten
……..
Weitere Ziffer wird festgelegt: 10100011101 à nur ein Transponder antwortet
2 Einführung in die Radiofrequenzidentifikation
73
cher bei elektromagnetisch gekoppelten Systemen sind in der Praxis Werte zu erwar-
ten, die ungefähr bei 1/10 der theoretischen Erwartungen liegen.
Bei LF-Systemen existieren aufgrund der geringen Datenübertragungsraten keine
pulkfähigen Lösungen. Diese Systeme sind auf die Einzelidentifikation von
Transpondern, beispielsweise bei der Tieridentifikation oder der Wegfahrsperre im
Fahrzeug, beschränkt.
Ebenso sind Oberflächenwellensysteme, die im Wesentlichen bei einer Frequenz
von 2,45 GHz arbeiten, aufgrund ihrer Bauform nicht pulkfähig. Sie werden in der
Regel ohne Mikrochip hergestellt, wodurch sich keine Antikollisionsalgorithmen reali-
sieren lassen.
Generell stellt der Antikollisionsalgorithmus mit seinen andwendungsspezifischen
Einstellungen einen wesentlichen Einflussfaktor auf die Leistungsfähigkeit eines
RFID-Systems dar.
2.5.6 Materialdurchdringung
Aufgrund der großen Wellenlänge zeichnen sich die niedrigen Frequenzen durch
eine niedrige Absorptionsrate in nichtmetallischen Stoffen und Wasser aus und sind
durch hohe Eindringtiefe bei diesen Materialien charakterisiert. Hingegen wird bei
hohen Frequenzen im Gigahertz-Bereich die Absorptionsrate entsprechend
Abbildung 2-36 bei Wasser und organischen Stoffen sehr hoch.
Deshalb steht der hohen Leistungsfähigkeit der höheren Frequenzen hinsichtlich
Reichweiten und Übertragungsraten eine höhere Umgebungsempfindlichkeit sowie
eine geringere Materialdurchdringung speziell bei organischen Stoffen gegenüber.
Neben wasserhaltigen Stoffen haben speziell Metalle einen sehr großen Einfluss auf
RFID-Systeme. Sowohl das magnetische wie auch das elektromagnetische Feld
können metallische Stoffe zum einen nicht durchdringen, zum anderen wirken sie
sich in direkter Umgebung des Transponders stark negativ auf dessen Leistungsfä-
higkeit aus. Metallische Objekte können dadurch nicht direkt gekennzeichnet werden.
Der Einfluss des Metalls steigt dabei mit der Frequenz und spielt besonders bei der
Kennzeichnung von Bauteilen in der Automobilindustrie eine große Rolle, da die
meisten Bauteile entweder aus Metall bestehen oder beispielsweise im Falle von fa-
serverstärkten Kunststoffen metallhaltig sind.
2 Einführung in die Radiofrequenzidentifikation
74
2.5.7 Zusammenfassung der Eigenschaften von RFID-Systemen
Die oben beschriebenen Eigenschaften von RFID-Systemen in Abhängigkeit der
Frequenz lassen sich entsprechend Abbildung 2-43 zusammenfassen.
Klein / Sehr GroßMittel / Sehr GroßGroßKlein
Baugröße
Sehr HochHochNiedrigSehr niedrig
Einfluss von Metall
Sehr HochSehr HochHochNiedrig
Datenüber-tragungsraten
Sehr HochHochNiedrigNiedrig
Einfluss von Flüssigkeiten
3 m / 300 m5 m / 100 m1,7 m0,2 m
Praktische max. Reichweite
Ja / Ja
868 Mhz(passiv / aktiv)
Derzeit Nein / JaJaNein
Pulkfähigkeit
2,45 GHz(passiv / aktiv)
13,56 Mhz125 kHz
Klein / Sehr GroßMittel / Sehr GroßGroßKlein
Baugröße
Sehr HochHochNiedrigSehr niedrig
Einfluss von Metall
Sehr HochSehr HochHochNiedrig
Datenüber-tragungsraten
Sehr HochHochNiedrigNiedrig
Einfluss von Flüssigkeiten
3 m / 300 m5 m / 100 m1,7 m0,2 m
Praktische max. Reichweite
Ja / Ja
868 Mhz(passiv / aktiv)
Derzeit Nein / JaJaNein
Pulkfähigkeit
2,45 GHz(passiv / aktiv)
13,56 Mhz125 kHz
Abbildung 2-43: Eigenschaften von RFID-Systemen
2.6 Standardisierung der RFID-Technologie
Neben den technologischen Randbedingungen spielen insbesondere für den unter-
nehmensübergreifenden RFID-Einsatz in offenen Kreisläufen internationale Stan-
dards eine elementare Rolle. Mit Hilfe von Standardisierung können
Schnittstellenprobleme im Netzwerk entlang der Supply Chain gelöst und die Verbrei-
tung der Technologie beschleunigt werden. Zudem bilden Standards die Vorausset-
zung für einen Wettbewerb und ermöglichen eine Senkung der Systemkosten bei
gleichzeitiger Steigerung des Nutzens durch Netzeffekte [SCM-05].
Zur Einteilung der verschiedenen Standards lassen sich in Anlehnung an [VDE-06]
entsprechend Abbildung 2-44 sieben Gruppen bilden.
2 Einführung in die Radiofrequenzidentifikation
75
RFID-Standards
2.6.2 Luftschnittstelle
Datenmanagement
Kontaktlose Chipkarten
Testmethoden
2.6.4 EPC-Netzwerk2.6.1 Funkvorschriften
Einsatzempfehlungen
2.6.3 Anwendungsstandards
Abbildung 2-44: Standardisierung im Bereich RFID
Die Standards für kontaktlose Chipkarten und für das Datenmanagement, die den
Austausch der Daten in einem RFID-System beschreiben, sowie Empfehlungen zum
Einsatz von RFID-Systemen, in denen Anleitungen zur Installation und Inbetrieb-
nahme wie auch RFID-Begriffe standardisiert sind, werden hier nur der Vollständig-
keit erwähnt. Ebenfalls wird auf eine Beschreibung der Testmethoden verzichtet, die
sich schwerpunktmäßig mit Methoden zur Konfirmitätsprüfung der Luftschnittstelle
beschäftigen. Die genannten Standardgruppen besitzen für die vorliegende Arbeit
und für das dafür benötigte Verständnis von RFID-Systemen nur eine geringe Rele-
vanz und sind in [VDE-06] beschrieben.
2.6.1 Funkvorschriften
RFID-Systeme werden rechtlich als Short Range Devices (SRD) betrachtet und un-
terliegen daher den regionalen gesetzlichen Vorgaben hinsichtlich der nutzbaren
Frequenzen und Sendeleistungen.
Zur Gruppe der SRD gehören neben RFID-Systemen unter anderem Garagentoröff-
ner, Bewegungsmelder und Systeme auf Bluetooth- sowie WLAN-Basis. Die Fre-
quenzen werden regional freigegeben – in Deutschland durch die Regulierungs-
behörde für Telekommunikation und Post – und sind für die Nutzung durch die
Allgemeinheit zugeteilt und dürfen daher ohne Anmeldung kostenfrei genutzt werden
[REG-07].
2 Einführung in die Radiofrequenzidentifikation
76
Während die Frequenzen 125 kHz, 13,56 MHz und 2,45 GHz nahezu weltweit zur
Verfügung stehen (vgl. Abbildung 2-45), existieren für den UHF-Bereich international
keine einheitlichen Frequenzstandards. Durch die gegenseitige Blockierung dieser
Frequenzbereiche, unter anderem durch den Mobilfunk, ist mit einer weltweiten Ver-
einheitlichung, wie sie im LF- und HF-Bereich realisiert ist, nicht zu rechnen [GRU-
05]
Europa125 kHz, 13,56 MHz
868 MHz2,45 GHZ
Südafrika125 kHz, 13,56 MHz
868 MHz2.45 GHz
USA & Kanada125 kHz, 13,56 MHz
902-928 MHz2,45 GHz
China-
917-922 MHz*2,45 GHz
Japan125 kHz, 13,56 MHz
952-954 MHz2,45 GHz
Korea125 kHz, 13,56 MHz
910-914 MHz
Australien125 kHz, 13,56 MHz
920-926 MHz2,45 GHz
* Lizenz muss zeitlich befristet beantragt werden
Abbildung 2-45: Freigegebene Sendefrequenzen für RFID-Systeme
Neben uneinheitlichen Sendefrequenzen existieren darüber hinaus im Ultrahochfre-
quenzbereich auch weltweit uneinheitliche Sendeleistungsstandards und unter-
schiedliche Operationsmodi. Unterscheiden lassen sich dabei das „listen-before-
talk“- und das „frequency-hopping“-Verfahren.
2.6.1.1 „Frequency-hopping“-Verfahren
Dem „frequency-hopping“-Verfahren liegt die Annahme zu Grunde, dass eine Viel-
zahl von Sendekanälen vorhanden ist. Jeder physische Kanal wird dem System nur
für ein gewisses Zeitfenster zugeteilt und anschließend sprunghaft gewechselt (vgl.
Abbildung 2-46).
2 Einführung in die Radiofrequenzidentifikation
77
Kanal
1
Kanal
1
Kanal
1
Kanal
1
Kanal
1
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
1
Zeit
Frequenz
Zeitschlitz
Kanal
1
Kanal
1
Kanal
1
Kanal
1
Kanal
1
Kanal
1
Kanal
1
Kanal
1
Kanal
1
Kanal
1
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
2
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
3
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
4
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
5
Kanal
1
Kanal
1
Zeit
Frequenz
Zeitschlitz
Abbildung 2-46: Prinzipielle Funktionsweise des „frequency-hopping“-Verfahrens [KLU-01]
Nachteilig bei diesem Verfahren sind der erhöhte Verwaltungsaufwand für die
Sprungreihenfolgen und eine Verringerung der Nutzdatenrate, da sowohl zusätzliche
Verwaltungsdaten über den Funkkanal transportiert werden müssen als auch das
System vor und nach dem Sprung immer etwas Zeit zum Einschwingen benötigt
[KLU-01]. Diese Technik gilt als sehr sicher, Sender und Empfänger müssen jedoch
genau aufeinander synchronisiert sein, wodurch eine relativ komplexe elektronische
Schaltung notwendig ist und folglich hohe Herstellungskosten entstehen [ITW-07].
2.6.1.2 „Listen-before-talk“-Verfahren
Beim „listen-before-talk“-Verfahren handelt es sich um ein Zugriffsverfahren auf ei-
nen Funkkanal [KLU-01]. Das Lesegerät prüft dabei vor dem Senden die Belegung
des Nutzkanals. Wird nach einem fest vorgegebenen Zeitfenster keine Störung oder
Belegung erkannt, startet die Datenübertragung [ITW-07]. Das Verfahren sorgt damit
für eine bessere Auslastung der Frequenzressource, benötigt aber durch die Nut-
zungsüberprüfung mehr Zeit und bietet nicht die Sicherheit des frequency-hopping-
Verfahrens. Sie wird deshalb bevorzugt angewendet, wenn lediglich eine geringe
Anzahl an Kanälen zur Verfügung steht.
2.6.1.3 Sendeleistung für UHF-Systeme
Zusätzlich zu den Operationsmodi ist im UHF-Bereich auch die maximal erlaubte
Sendeleistung der RFID-Systeme international unterschiedlich geregelt. (vgl. Tabelle
2-4).
2 Einführung in die Radiofrequenzidentifikation
78
Tabelle 2-4: Internationaler Vergleich der Funkvorschriften im UHF Bereich
Land Frequenz Kanäle Leistung Modus
Deutschland 869,4 – 869,65 MHz 1 0,5 W ERP „listen-before-talk“
Deutschland 865,6 – 867,6 MHz 10 2,0 W ERP „listen-before-talk“
USA 902 – 924 MHz 50 4,0 W EIRP „frequency-hopping“
Japan 952 – 954 MHz 10 4,0 W EIRP „frequency-hopping“
Korea 908,5 – 910 MHz 4,0 W EIRP „listen-before-talk“
Korea 910 – 914 MHz 4,0 W EIRP „frequency-hopping“
Den international unterschiedlichen Regelungen begegnet man bei UHF-Systemen
durch eine breite Auslegung der Transponderresonanzfrequenz, um eine weltweite
Lesbarkeit zu gewährleisten. Trotzdem sind Parametereinstellungen und Leistungs-
fähigkeit von RFID-Systemen nicht grundsätzlich auf andere Länder übertragbar,
wodurch bei internationalen RFID-Kreisläufen in der Regel länderspezifische Sys-
temspezifikationen gefunden werden müssen und meist separate Pilotphasen not-
wendig werden. Der internationale Einsatz von UHF-RFID-Systemen ist dadurch mit
einem deutlichen Mehraufwand in der Planung und Inbetriebnahme verbunden.
Bei anderen Frequenzbereichen existieren ebenfalls nationale Unterschiede, die im
Verhältnis zur UHF-Technologie geringer sind und sich im Wesentlichen auf die er-
laubte Sendeleistung beschränken. Detailliert können die nationalen und internatio-
nalen Funkvorschriften in [FIN-06] und [AIM-07] nachgelesen werden.
2.6.2 Luftschnittstellenstandards
Die Luftschnittstelle zwischen Transponder und Reader ist das zentrale Element ei-
nes jeden RFID-Systems. Für die gegenseitige Kommunikation müssen Codierung,
Modulation und Protokoll eindeutig geregelt werden.
Für passive RFID-Systeme haben sich hierfür weltweit gültige ISO-Standards etab-
liert, die gewährleisten, dass der Einsatz von RFID-Systemen in weltweit offenen
Kreisläufen möglich ist und zudem Transponder von beliebigen Lesegeräten, die den
jeweiligen Standard unterstützen, ausgelesen werden können (vgl. Tabelle 2-5).
2 Einführung in die Radiofrequenzidentifikation
79
Tabelle 2-5: ISO-Luftschnittstellenstandards für passive RFID-Systeme
Frequenz Luftschnittstellenstandards
LF ISO 11785, 18000-2
HF ISO 14443, 15693,18000-3
UHF ISO 18000-6
SHW ISO 18000-5
Während im UHF-Bereich durch die Übernahme des Standards EPC-Gen 2 in die
neue ISO-Norm 18000-6C und die dadurch bedingte Abnahme der Bedeutung der
Vorschriften ISO 18000-6A und B ein einheitlicher Standard existiert, sind aus der
Historie im HF-Bereich differente Standards in der ISO-Norm 18000-3 entstanden.
Diese werden zwar in der Regel von den meisten Lesegeräten unterstützt, schränken
aber bei gleichzeitiger Aktivierung die Leistungsfähigkeit stark ein. Aufgrund dessen
ist bei einem unternehmensübergreifenden Einsatz speziell von HF-Systemen die
Einigung auf einen einheitlichen Luftschnittstellenstandard essentiell, um eine hohe
Leistungs- und Pulkfähigkeit zu erreichen41.
Bei aktiven Systemen kommen in der Regel proprietäre Protokolle zum Einsatz, wo-
durch batteriegestützte Transponder meist nur mit spezifischen Lesegeräten ausge-
lesen werden können. Verursacht wird dies durch die Tatsache, dass bei aktiven
Systemen Transponder und Lesegeräte - im Gegensatz zu passiven Systemen - von
einem Unternehmen hergestellt werden und darüber hinaus häufig mit Zusatzfunkti-
onen wie beispielsweise Temperaturkontrolle ausgestattet sind, für deren Steuerung
eigene Protokolle notwendig sind.
Für den netzwerkweiten Einsatz von aktiven Systemen ist daher eine einheitliche
Auswahl der Hardware notwendig.
2.6.3 Anwendungsstandards
Anwendungsstandards empfehlen eine bestimmte technische Lösung für einzelne
Anwendungen und greifen dabei auf andere existierende technologieorientierte
Standards, z. B. zur Luftschnittstelle oder zum Datenmanagement, zurück [VDE-06].
41 LF-Systeme werden aufgrund ihrer Nicht-Pulkfähigkeit und der dadurch bedingten geringen Rele-
vanz nicht behandelt.
2 Einführung in die Radiofrequenzidentifikation
80
Für eine aufwandsarme und effiziente Einführung von RFID-Systemen in unterneh-
mensübergreifenden Netzwerken sind sie durch die Festlegung standardisierter Pro-
zesse mit den dazugehörigen Daten sowie der Technologie von elementarer
Bedeutung.
Aufgrund der jungen Historie der RFID-Technologie in industriellen Anwendungen
befinden sich derzeit internationale Normen meist erst in der Planungs- oder Bear-
beitungsphase. Darunter sind logistikspezifische Richtlinien zur Kennzeichnung von
Frachtcontainern, Transporteinheiten und Artikeln, die unter anderem auf die ISO
18000er Normenreihe zurückgreifen [VDE-06]. Veröffentlicht sind bis jetzt lediglich
branchenspezifische ISO-Standards im Bereich der Tieridentifikation. Internationale
Standards zur Anwendung von RFID-Systemen in der Automobilindustrie sind derzeit
weder existent noch in Planung.
Das Fehlen von Anwendungsstandards wird als eines der Haupthemmnisse bei der
Einführung von RFID betrachtet (vgl. [STR-05]). Aufgrund der Vielzahl und Vielfalt
der beteiligten Partner gestaltet sich der Normungsprozess langwierig, so dass kurz-
fristig keine wesentliche Veränderung der Standardisierungslücke zu erwarten ist.
Des Weiteren existieren auch einige nationale anwendungsorientierte RFID-
Richtlinien, die aber aufgrund der regionalen Einschränkung nur in Einsatzfällen he-
rangezogen werden können, und dadurch das Problemfeld der fehlenden Anwen-
dungsstandards nur bedingt lösen.
Vom Verein Deutscher Ingenieure werden in der VDI 4472 Richtlinien für den Einsatz
in der Supply Chain erarbeitet. Bis auf eine branchenspezifische Norm für die Textil-
industrie und die Mehrweglogistik sowie Abnahmeverfahren zur Überprüfung der
Leistungsfähigkeit von RFID-Systemen befinden sich auch hier weitere Normungs-
vorhaben erst in der Planung oder in der Entwicklung (vgl. Tabelle 2-6).
2 Einführung in die Radiofrequenzidentifikation
81
Tabelle 2-6: VDI-Richtlinienprojekt 4472
Titel Status
Blatt 1: Einsatz der Transpondertechnologie (Allgemeiner Teil) veröffentlicht
Blatt 2: Einsatz der Transpondertechnologie in der textilen Kette
(HF-Systeme)
veröffentlicht
Blatt 3: Einsatz der Transpondertechnologie in der textilen Kette
(UHF-Systeme)
in Bearbeitung
Blatt 4: Kostenbewertung von RFID-Systemen Entwurf
Blatt 5: Einsatz der Transpondertechnologie in der Mehrweglogis-
tik
veröffentlicht
Blatt 6: Einsatz der Transpondertechnologie in der Kühlkette in Planung
Blatt 7: Einsatz der Transpondertechnologie in der Entsorgungs-
logistik
in Bearbeitung
Blatt 8: Leitfaden für das Management von RFID-Projekten Entwurf
Blatt 9: Einsatz der Transpondertechnologie in der Getränkelogis-
tik
in Planung
Blatt 10: Abnahmeverfahren zur Überprüfung der Leistungsfähigkeit
von RFID-Systemen
veröffentlicht
Blatt 11: Leitfaden zur Transpondertechnologie unter Sicherheits-
aspekten
in Planung
Auch der Verband der deutschen Automobilindustrie (VDA) hat sich dem Thema
RFID zur Kennzeichnung von Gütern, Fahrzeugen und zur Rückverfolgung in der
Wertschöpfungskette gewidmet. Im Juli 2005 ist in diesem Zusammenhang die VDA-
Empfehlung 5005 erschienen. Die unverbindliche Empfehlung beschreibt Prozesse
und Verfahrensweisen zur Ver- und Rückverfolgbarkeit von Fahrzeugteilen sowie zur
Identifizierbarkeit ihrer technischen Ausführung. Dabei wird neben dem Barcode
auch die Transpondertechnik zur Kennzeichnung von Bauteilen empfohlen. Eine
Spezifikation hinsichtlich der Technologie, beispielsweise eine Festlegung der Sen-
defrequenz, erfolgt nicht.
Des Weiteren wurde im November 2006 die VDA-Empfehlung 5501 mit dem Titel
„RFID im Behältermanagement der Supply Chain“ erarbeitet. In der Empfehlung
wurde eine Standardisierung des Einsatzes von RFID-Komponenten im Behälterma-
2 Einführung in die Radiofrequenzidentifikation
82
nagement in der Supply Chain ausgesprochen. Dabei befasste sich das Projekt mit
der Standardisierung der auf dem Transponder zu speichernden Daten und der ein-
zusetzenden Technologie. Aufgrund der Leistungsfähigkeit und der geringen Kosten
wurde hierbei der passive UHF-Frequenzbereich ausgewählt.
In den USA gibt es ähnliche Bestrebungen Standards für verschiedene Aktivitäten
der amerikanischen Automobilindustrie zu entwickeln. Die AIAG (Automotive Industry
Action Group) hat bereits 2002 den Standard B-11 verabschiedet, der die Verwen-
dung von RFID zur Kennzeichnung von Autoreifen als Alternative zu 2D-Codes vor-
sieht. Bei Anwendung von RFID ist die UHF-Technologie einzusetzen und die
Transponder sind an der Außenseite des Reifens anzubringen. Als Erfassungsreich-
weite gibt die Norm mindestens 61 cm (24 inch) an. Die Datenstruktur der RFID-
Lösung umfasst Angaben über Hersteller, Werk, Produktionsdatum, eine eindeutige
Seriennummer, die Fahrzeugnummer sowie einen frei verfügbaren Bereich [STR-05].
Zusammenfassend lässt sich feststellen, dass nur wenige internationale Anwen-
dungsstandards für RFID-Systeme existieren. Im Bereich der Automobilindustrie gibt
es lediglich einige nationale Empfehlungen hinsichtlich des RFID-Einsatzes.
Dies hat zur Konsequenz, dass bei einem unternehmensübergreifenden Einsatz der
Technologie zum einen ein hoher Abstimmungsaufwand zwischen den Partnern not-
wendig ist, und zum anderen bei einer Umsetzung mittelfristig die Gefahr des Auf-
kommens eines differenten Standards vorhanden ist. Dadurch kann das eigene
System schnell veraltet sein, wodurch eine Investitionssicherheit nicht gegeben ist.
2.6.4 EPC – Netzwerk
Die weltweite Nachverfolgbarkeit von Produkten ist die Grundidee des EPCglobal-
Netzwerks, das 1999 im Massachusetts Institute of Technology (MIT) entstanden ist.
Dazu soll jeder produzierte Gegenstand mit einem RFID-Transponder versehen wer-
den, damit „sich sein Aufenthaltsort mit Hilfe einer globalen Infrastruktur über Unter-
nehmens- und Ländergrenzen hinweg bestimmen lässt“ [AUT-02]. Dadurch werden
insbesondere Verbesserungen der betrieblichen Prozesse in der Fertigung [CGS-02],
der Lieferkette [AGG-02] und der Warenwirtschaft [CDG-02] erwartet.
Dafür wurde neben der Festlegung der auf dem Transponder zu speichernden Daten
auch ein IT-Konzept für die durchgängige Verfügbarkeit der Produktdaten geschaf-
fen, um eine weltweite Rückverfolgbarkeit von Gütern zu gewährleisten (vgl.
Abbildung 2-47).
2 Einführung in die Radiofrequenzidentifikation
83
Abbildung 2-47: EPC-Netzwerk [EPC-07a]
Hinsichtlich der Frequenz und der Betriebsart beruht der EPC-Standard auf der pas-
siven UHF-Technologie.
2.6.4.1 Der Electronic Product Code (EPC)
Der EPC-Standard sieht vor, dass zur eindeutigen Kennzeichnung eines Produktes
jedem Artikel eine weltweit einmalige Ziffernfolge, der so genannte Elektronik Pro-
dukt Code (EPC), zugeordnet und auf einem am Objekt befestigen Transponder ge-
speichert wird.
Es wurden verschiedene EPC-Strukturen definiert, wobei insbesondere die 96 Bit
Strukturen
• General Identifier (GID) und
• Serialized Global Trade Item Number (SGTIN-96), welche die Barcodestruktur
EAN/UCC um eine Seriennummer erweitert,
von Bedeutung sind.
Vereinfacht hat der EPC die folgende Struktur [TZI-07]:
• Der Header gibt die EPC-Version und die Kodierung an, z.B. SGTIN-96.
• Der EPC-Manager stellt die Kennung des Herstellers dar.
• Die Objektklasse bezeichnet die Produktfamilie.
• Die Seriennummer dient der eindeutigen Identifikation des Objektes.
In Abbildung 2-48 ist beispielhaft ein GID-Electronic Product Code dargestellt.
2 Einführung in die Radiofrequenzidentifikation
84
GID
Abbildung 2-48: Beispielhafte Darstellung eines GID EPC (in Anlehnung an [FLÖ-05])
Zunächst sah das Konzept vor, neben dem EPC keine weiteren Daten auf dem
Transponder zu zulassen. Aufgrund der Forderung, vor allem aus der produzieren-
den Industrie, einen freien Speicher für Daten zur Prozesssteuerung vorzusehen,
wurde in jüngster Vergangenheit im Rahmen des EPC der zweiten Generation ein
frei nutzbarer Speicherbereich mit aufgenommen, aber noch nicht weiter spezifiziert
(vgl. Abbildung 2-49). Derzeit verfügt ein UHF-Transponder in der Regel über einen
128 Bit Speicher und bietet dadurch neben einem 96 Bit EPC Platz für 32 Bit Nutzer-
daten. Derzeit sind im UHF-Bereich 512 Bit Transponder in der Entwicklung bezie-
hungsweise in der Markteinführung, so dass davon auszugehen ist, dass sich der
freie Speicherbereich zukünftig weiter vergrößern wird (vgl. Kapitel 2.7), wobei nach
wie vor alle zur Produktverfolgung und Produktkennzeichnung notwendigen Daten
auf Basis der Konzeptidee des EPC zentral gehalten werden sollen.
Abbildung 2-49: Spezifikation des EPC der zweiten Generation [CLA-06]
2 Einführung in die Radiofrequenzidentifikation
85
Nach [CLA-06a] bietet die Beschränkung der dezentralen Datenhaltung dabei fol-
gende Vorteile:
• Hohe Auslesegeschwindigkeit auch vieler Tags gleichzeitig
• Keine sensiblen Daten öffentlich auf dem Tag
• Niedrige Tag-Preise aufgrund des geringen Speicherbedarfs
• Normierte Datenhaltung an einem Ort
2.6.4.2 IT-Netzwerk
Damit eine weltweite Rückverfolgbarkeit von Produkten ermöglicht wird, ist neben
der eindeutigen Produktkennzeichnung und -identifizierung ein IT-Netzwerk zum Fin-
den, Speichern und Verwalten der produktbezogenen Informationen notwendig.
Hierzu wurde im Rahmen der Forschungstätigkeiten des MIT ein auf dem Internet
basierendes Kommunikationsnetzwerk als Infrastruktur entwickelt und von EPCglo-
bal42 umgesetzt, dass die Bereitstellung in Echtzeit diese Informationen gewährleis-
tet.
Im Wesentlichen verbindet das EPCglobal-Netzwerk dezentrale Server, die Produkt-
informationen (d. h. zu einer bestimmten EPC-Nummer gehörende Stamm- oder Be-
wegungsdaten) enthalten. Diese werden als EPC-Informationenservice (EPCIS)-
Server bezeichnet.
Zum Finden der Informationen dient der Objektnamendienst (ONS), ein zentraler
Verzeichnis-Server analog zu DNS-Servern im WorldWideWeb, der die zentralen
Datensätze indiziert. Die Verwaltung und Meldung von Ereignissen im Netzwerk er-
folgt mit Hilfe von Event Registry Diensten.
Zum besseren Verständnis wird nachfolgend das EPC-Netzwerk an Hand eines kon-
kreten Beispiels beschrieben, dass zusammenfassend in Abbildung 2-50 dargestellt
ist.
Bei der Herstellung wird das Produkt mit einem eindeutigen EPC gekennzeichnet (1)
und gleichzeitig dessen relevante Daten im unternehmensinternen EPCIS-Server
hinterlegt (2). Dieser meldet das Ereignis der EPC-Erzeugung an den Event Re-
gistry-Dienst, wodurch es im EPC-Netzwerk bekannt wird (3). Nach Versendung des 42 EPCglobal wurde 2003 von GS1 und GS1 US (ehemals EAN International und das Uniform Code
Council, Inc.) gegründet und entwickelt Standards für die einheitliche Nutzung der Radiofrequenz-
technologie für Identifikationszwecke (RFID) entlang der gesamten Versorgungskette über Länder-
und Branchengrenzen hinweg.
2 Einführung in die Radiofrequenzidentifikation
86
Produktes (4) zum nächsten Unternehmen in der Wertschöpfungskette registriert
dieses das Produkt in seinem Wareneingang mit Hilfe der RFID-Technologie und
speichert gleichzeitig dazugehörige relevante Informationen in seinem lokalen
EPCIS-Server (5), der wiederum das Ereignis mit einer Meldung an den Event Re-
gistry Dienst im Netzwerk registriert (6). Benötigt das Unternehmen Informationen
über das Produkt, so gelangt es mit Hilfe des ONS-Dienstes (7), in dem die zentralen
Stammdatensätze identifiziert sind, zum lokalen EPCIS-Server (8), der die geforder-
ten Datensätze verwaltet. Werden Informationen über Ereignisse des Produktes, wie
beispielsweise Warenein- und -ausgänge benötigt, erfolgt die Abfrage und Zuwei-
sung des lokalen EPCIS-Servers durch den Event-Registry Dienst.
Zentrales EPC-Netzwerk
EPC Event Registry
ONS
Dezentrales Netzwerk
Dezentrales Netzwerk
EPCISERP ERPEPCIS
(1)
(2)
(3)
(4)(5)
(6)(7)
(8)
Abbildung 2-50: Die Funktionsweise des EPC-Netzwerks
Durch die internetbasierte Bereitstellung von Echtzeit-Informationen mit Hilfe der
EPCglobal steht ein IT-Netzwerk zur Steigerung der Informationstransparenz und der
weltweit durchgängigen Rück- und Nachverfolgbarkeit von Produkten zur Verfügung.
Durch den Einsatz der RFID-Technologie ist des Weiteren davon auszugehen, dass
sich im Vergleich zu derzeit eingesetzten Ident-Systemen aufgrund der automatisier-
ten und kostengünstigen Erfassung von Produkten, die Anzahl der Ereignisse und
damit die Transparenz in der Wertschöpfungskette stark erhöhen wird.
Derzeit sind über 200 Unternehmen Mitglieder bei EPCglobal Deutschland, wodurch
Deutschland eine führende und markttreibende Rolle im EPC-Netzwerk einnimmt
[EPC-07b]. Die Unternehmen stammen überwiegend aus den Branchen Handel, Be-
2 Einführung in die Radiofrequenzidentifikation
87
kleidung, Pharma und Logistik. Von den deutschen Automobilfirmen ist bis jetzt ledig-
lich die Daimler AG im November 2007 dem EPCglobal-Gremium beigetreten. Es
wird aber erwartet, dass durch diesen ersten Schritt der Daimler AG mittelfristig an-
dere Fahrzeughersteller folgen werden [LOG-07].
2.7 Technologische Entwicklungstrends
Zum Abschluss des Kapitels RFID-Grundlagen sollen hier die wesentlichen Entwick-
lungstrends der Technologie aufgezeigt werden. Dieser Abschnitt hat keinen An-
spruch auf Vollständigkeit, sondern soll die grundsätzliche Richtung der technischen
Entwicklungen aufzeigen.
Als wesentliche Entwicklungstrends sind aus Sicht des Autors hierbei zu nennen:
• Fortschreitende Miniaturisierung und Reduktion des Stromverbrauch von Mik-
rochips bei passiven Systemen
• Kompakte aktive Transponder durch den Einsatz von druckbaren Batterien
• Kostengünstige einfache passive Transponder für die Kennzeichnung von
Massenprodukten auf Basis der Polymertechnologie
2.7.1 Fortschreitende Reduzierung des Stromverbrauchs bei Mikrochips
Passive Systeme gewinnen die benötigte Energie ausschließlich aus dem elektro-
magnetischen Feld. Aus diesem Grund wird die Leistungsfähigkeit im Wesentlichen
durch den Stromverbrauch des Mikrochips auf dem Transponder beschränkt.
Auf der Grundlage des Gesetzes von Moore, das besagt, dass sich die Zahl der auf
einem Chip integrierbaren elektronischen Komponenten alle 18 bis 24 Monaten ver-
doppelt [MOO-65], ist davon auszugehen, dass die Leistungsfähigkeit von Mikrochips
in den nächsten Jahren weiter steigen wird und dabei gleichzeitig der Strombedarf
signifikant sinkt. Dadurch ist zukünftig mit deutlich höheren Nutzspeichern für passive
RFID-Transponder zu rechnen. Im UHF-Bereich hat NXP Semiconductors beispiels-
weise im Jahr 2007 einen IC auf dem Markt gebracht, der mit einem 240 Bit EPC-
Speicher und einem Nutzspeicher von 512 Bit versehen ist [ELE-07, NXP-07] und
der derzeit auf ersten Transpondern am Markt appliziert wird. Dies geht deutlich über
die bis dahin auf den Markt üblichen Mikrochips mit einer Gesamtkapazität von 128
Bit hinaus.
Eine Reduzierung des Energieverbrauches der elektronischen Komponenten wird
darüber hinaus in den nächsten Jahren die Integration von Sensoren und von leis-
2 Einführung in die Radiofrequenzidentifikation
88
tungsfähigen kryptischen Algorithmen sowie Prozessoren auf den mobilen Datenträ-
gern ermöglichen.
Dadurch wird es zukünftig möglich sein, Objekte mit Hilfe von RFID mit einer dezen-
tralen Intelligenz auszustatten, die es Ihnen ermöglicht selbstständig miteinander zu
kommunizieren. Aufbauend darauf lassen sich autonome, logistische Netzwerke, die
sich selbst organisieren und steuern können – analog zum Internet – realisieren. In
dieser als „Internet der Dinge“ bezeichneten Vision finden Produkte allein ihren Weg
von der Produktion bis zum Kunden – und wieder zurück zum Recycling (vgl. [GÜN-
07a, GÜN-07c]).
Ausserdem werden sich zukünftig durch komplexere und leistungsfähigere Sicher-
heitsalgorithmen auf den mobilen Datenspeichern vermehrt auch Anwendungen zum
Schutz vor Produktpiraterie realisieren lassen.
2.7.2 Integration von druckbaren Batterien
Neben der Reduzierung des Stromverbrauches der elektronischen Komponenten
kann die Leistungsfähigkeit von Transpondern auch durch kostengünstige druckbare
Batterien gesteigert werden.
Nach [RFU-07] wird der Markt für Transponder mit integrierter gedruckter Batterie im
Jahr 2015 4,6 Milliarden Dollar erreichen. Aktuell geht man von einem Marktvolumen
von unter 15 Millionen Dollar aus [RFU -07].
Durch die Möglichkeit einen aktiven Transponder mit der Größe eines passiven
Smart Labels herzustellen, ist langfristig eine Verschmelzung der aktiven und passi-
ven Technologie zur „battery-assisted passive technology“ denkbar. Dies würde eine
Leistungsexplosion der Transponder zur Kennzeichnung von Produkten hinsichtlich
Reichweite nach sich ziehen.
Derzeit sind bereits von der Firma Power ID [POW-08] solche Datenträger auf dem
Markt, die sich aber insbesondere aufgrund der aktuell noch hohen Kosten und der
unzureichenden Batteriehaltbarkeit sowie deren Empfindlichkeit gegenüber mechani-
schen und vor allem thermischen Belastungen nur in wenigen Anwendungsfällen
technisch und wirtschaftlich einsetzen lassen.
2 Einführung in die Radiofrequenzidentifikation
89
Abbildung 2-51: „Battery-assisted Labels“ der Firma Power ID [POW-08]
2.7.3 Polymertransponder
Für die Kennzeichnung von einfachen Produkten in offenen Kreisläufen sind die der-
zeit auf dem Markt verfügbaren Transponder deutlich zu teuer. Selbst durch Preise
im niedrigen einstelligen Cent-Bereich lässt sich eine Kennzeichnung von
Verbrauchsgütern wie einem Joghurtbecher wirtschaftlich nicht realisieren.
Zukunftspotenzial bieten hier Transponder auf der Basis von halbleitenden organi-
schen Polymeren als Substitut für die auf Silizium basierenden Schaltungen. Poly-
merelektronik kann dabei in einfachen Druckverfahren hergestellt werden, wodurch
sich eine signifikante Reduzierung der Kosten erreichen lässt. Bereits heute existie-
ren von der Firma PolyIC Produkte im HF-Bereich auf dem Markt mit einer Speicher-
kapazität von einigen Bit [POL-08].
Diese Technologie wird in Zukunft den wirtschaftlichen Einsatz von RFID auf Mas-
senverbrauchsgütern ermöglichen. Jedoch ist zu erwarten, dass die Anwendungen
aufgrund der reduzierten Leistungsfähigkeit, im Vergleich zu Siliziumschaltungen,
und der gleichzeitig hohen mechanischen und thermischen Empfindlichkeit auf die
Kennzeichnung von einfachen kostengünstigen Massenwaren im Bereich des Han-
Der Halbwellendipol wird in der Mitte gespeist, wodurch sich im vorliegenden
Einsatzszenario Nachteile in der Kabelführung und Positionierung im Motorraum er-
geben.
Um eine längliche Bauform und damit das Einbringen in den Motorraum zu ermögli-
chen sowie darüber hinaus ein Verkanten des Dipols zwischen Komponenten zu
verhindern, muss das Kabel zwangsweise entlang des Dipols geführt werden. Da-
durch werden die Eigenschaften der Antenne verändert und es ergibt sich ein erhöh-
ter Aufbau. Folglich erweist sich der Halbwellendipol hinsichtlich seiner Handhabung
für den Einsatz im Motorraum als ungeeignet.
6 Antennenkonzepte für enge Bauräume
185
6.5.2.2 Koaxialantenne
Die Koaxialantenne ist im Vergleich zum Halbwellendipol durch ähnliche elektrische
Eigenschaften charakterisiert, ist aber aufgrund der Endspeisung für den Anwen-
dungsfall durch eine erhebliche günstigere Kabelführung gekennzeichnet. Die An-
tenneneigenschaften werden durch das Kabel nicht beeinträchtigt und eine einfache
Positionierung im Motorraum ist möglich.
Des Weiteren kann durch die längliche Bauform mit rundem Durchmesser die Wahr-
scheinlichkeit des Verkantens im Motorraum reduziert werden.
Die Koaxialantenne erfüllt damit die aufgestellten Anforderungen zur Handhabbar-
keit.
6.5.2.3 Schlitzantenne
Die Speisung der Schlitzantenne erfolgt direkt am Schlitz in Abhängigkeit der ge-
wünschten Eingangsimpedanz. Durch die Notwendigkeit, dass der Schlitz ganz von
einem geschlossenen, leitfähigen Material umgeben ist, lässt sich somit keine End-
speisung realisieren.
Die notwendige breite Bauform der Schlitzantenne kombiniert mit der ungünstigen
Kabelführung ergibt eine ungünstige Handhabung zur Positionierung der Antenne im
Motorraum. Darüber hinaus tendiert die Antenne durch die Bauform zum Verkanten
im Motorraum. Ebenfalls führt eine Berührung der Antenne mit Metall zur Funktions-
unfähigkeit der Antenne.
Die Schlitzantenne kann somit die gestellten Anforderungen an die Handhabung für
den vorliegenden Einsatzfall nicht erfüllen.
6.5.2.4 Zusammenfassung
Bei den evaluierten Antennenkonzepten erweist sich lediglich die Koaxialantenne
aufgrund ihrer Endspeisung und ihrer dadurch bedingten einfachen Positionierung im
Motorraum als geeignet. Die Koaxialantenne stellt somit durch ihre Bauform das ide-
ale Antennenkonzept für den Einsatz in engen Bauräumen dar, wodurch sich ein di-
rekter Vergleich der Sende- und Empfangsleistung der Konzepte erübrigt.
Zusammenfassend ist die Evaluierung der Handhabbarkeit der drei Antennenkon-
zepte für den Einsatz zur Bauzustandsdokumentation im Bereich des Motorraums in
Tabelle 6-3 dargestellt
6 Antennenkonzepte für enge Bauräume
186
Tabelle 6-3: Zusammenfassung der Evaluierung der Antennenkonzepte hinsichtlich der Erfül-
lung des Ausschluss-Kriteriums Handhabbarkeit
Kabelführung EndspeisungEinfache Handhabung und
Postionierung
Halbwellendipol - - -
Koaxialantenne + + +
Schlitzantenne - - -
6.6 Auslegung und Gestaltung der Koaxialantenne
Im Rahmen dieses Abschnittes gilt es, das für den Einsatzfall ausgewählte Anten-
nenkonzept einer Koaxialantenne beispielhaft auszugestalten, um die Erfüllung der
restlichen ermittelten Anforderungen zu überprüfen und im praktischen Test die Eig-
nung zur Identifikation von Transpondern im Motorraum nachzuweisen.
Bei der Auslegung und Gestaltung von Antennen handelt es sich generell um einen
iterativen Prozess, da Länge, Dicke und Material der Komponenten deren Eigen-
schaften direkt beeinflussen. Um die Antenne auf eine bestimmte Resonanzfrequenz
einzustellen, gleichzeitig die Reflexionsdämpfung zu minimieren und eine große
Breitbandigkeit zu gewährleisten, müssen die oben genannten Faktoren in einem
experimentellen Verfahren iterativ optimiert werden. Zusätzlich muss im Anwen-
dungsfall die Antenne durch geeignete Schutzmaßnahmen vor mechanischen und
chemischen Belastungen geschützt werden.
Die Koaxialantenne ist eine Sperrtopfantenne und besteht dadurch im Wesentlichen
aus einem Sperrtopf und einem Koaxialkabel als Speisekabel und Strahlelement.
Im Laufe der experimentellen Auslegung und Evaluierung der Koaxialantenne für den
Einsatz im Motorraum wurden mehrere Varianten einer Koaxialantenne aufgebaut,
die sich vor allem im Durchmesser und Material des Sperrtopfes und in der Ausfüh-
rung des freien Leiterstückes unterscheiden. Im Folgenden wird lediglich das im Rah-
men der Evaluierung ermittelte Best-Practise Konzept mit seinen Abmaßen
vorgestellt.
6.6.1 Aufbau der Best-Practise Koaxialantenne
Bei der iterativen praktischen Evaluierung verschiedener Koaxialantennen hat es
sich bewährt den Sperrtopf aus Kupfer mit einem Durchmesser von 12 mm und einer
Länge von exakt λ/4 auszuführen.
6 Antennenkonzepte für enge Bauräume
187
Durch den sehr schmalen Sperrtopf kann die Antenne sehr einfach und praktikabel in
den Motorraum eingebracht und gegenüber den Transpondern positioniert werden.
Gleichzeitig ergab sich in der praktischen Evaluierung eine hohe Leistungsfähigkeit
(vgl. Kap. 6.7).
Als Speisekabel kommt ein herkömmliches Koaxialkabel mit einem Durchmesser von
10 mm zum Einsatz, das auch das Strahlelement mit einer Länge von ebenfalls λ/4
bildet (siehe Abbildung 6-12).
Abbildung 6-12: Best-Practise Koaxialantenne mit 12 mm-Sperrtopf aus Kupfer
Im Folgenden werden die gemessenen Eigenschaften der entwickelten Antenne dar-
gestellt.
6.6.2 Messung der Empfangsleistung
Zur Messung der Empfangsleistung einer Antenne ist ein Spektrum-Analyzer mit ein-
gebautem oder separatem Tracking-Generator notwendig.
Sowohl die Sende- und die Empfangsantenne werden dabei direkt an den Analyzer
angeschlossen und in einem festen Abstand zueinander aufgebaut. Mit Hilfe des
Tracking-Generators kann das Gerät verschiedene definierte Frequenzbereiche
durchfahren und in die angeschlossene Sendeantenne einspeisen. Durch die Erfas-
sung der von der Empfangsantenne zurück in den Spektrum-Analyzer gelieferten
Leistung kann anschließend die Empfangsleistung der Antenne und deren Breitban-
digkeit bewertet werden.
Zu beachten ist, dass die Messung der Empfangsleistung durch die Abhängigkeit von
der Entfernung der Antennen zueinander und den Eigenschaften der Sendeantenne
sowie der eingespeisten Leistung nur im direkten Vergleich eine Aussage liefert.
Durch den direkten Zusammenhang der Empfangs- und Sendeleistung ist darauf
aufbauend ein Rückschluss und eine Übertragung der Empfangs- auf die Sendeleis-
tung der Antenne möglich. Des Weiteren ist bei der Verwendung einer auf die er-
6 Antennenkonzepte für enge Bauräume
188
wünschte Resonanzfrequenz abgestimmten Sendeantenne eine direkte Bewertung
der Resonanzfrequenz der Empfangsantenne gegeben.
6.6.2.1 Versuchsaufbau
Im Rahmen der durchgeführten Messreihe kam als Spektrum-Analyzer ein Gerät der
Firma Rohde und Schwarz mit der Bezeichnung „R&S FSL 3“ (siehe Abbildung 6-13)
zum Einsatz, das Frequenzen in einem Bereich von 9 kHz bis 3 Ghz darstellen kann.
Der Anschluss der Antennen erfolgte entsprechend Abbildung 6-14.
Abbildung 6-13: Spektrum-Analyzer R&S FSL3
[ROH-06]
Abbildung 6-14: Anschluss für die Sende-
und Empfangsantenne
(in Anlehnung an [ROH-06])
Als Sendeantenne und Referenz-Empfangsantenne wurde die bereits in Kapitel
6.3.1.1 beschriebene Feig-Antenne verwendet. Der Abstand zwischen Sende- und
Empfangsantenne betrug im Rahmen der Versuchsdurchführung konstant 0,5 m. Mit
Hilfe des Trackinggenerators wurde eine Leistung von -0,20 dBm in die Sendeanten-
ne eingespeist.
Zusammenfassend sind die Rahmenbedingungen des Versuchsaufbaus in Tabelle
6-4 dargestellt.
6 Antennenkonzepte für enge Bauräume
189
Tabelle 6-4: Rahmenbedingungen und Einstellungen zur Messung der Empfangsleistung
Verwendete Antennen
Sendeantenne Feig ID ISC.ANT.U250
Referenzantenne Feig ID ISC.ANT.U250
Geometrische Rahmenbedingungen
Abstand zwischen Sende- und Em-
pfangsantenne 0,5 m
Einstellungen Spektrum-Analyzer
Output Power -20 dBm
Center Frequency45 868 MHz
Span46 400 MHz
Sweeptime47 2,5 ms
6.6.2.2 Empfangsleistung der Koaxialantenne
Als Referenz wurde in einem ersten Schritt die Empfangsleistung der Feig-Antenne
im gemessenen Frequenzbereich ermittelt. Entsprechend Abbildung 6-15 ist dabei zu
erkennen, dass die Feig-Antenne zum einen sehr breitbandig und zum anderen auf
die Arbeitsfrequenz der RFID-UHF-Systeme von 868 MHz ausgelegt ist.
45 Die Center Frequency ist die Frequenz, auf die die Anzeige des Frequenzanalysegerätes zentriert
ist. 46 Als Span, oder Spannweite, wird jener Wertebereich verstanden, der von der Messung erfasst wird. 47 Als Sweeptime wird die Zeit bezeichnet, die das Frequenzanalysegerät für einen Durchlauf durch
den angegebenen Frequenzbereich benötigt. Eine geringe Sweeptime ist Voraussetzung für die
Messung kurzer Ereignisse, wie sie bei der messtechnischen Erfassung von Hochfrequenzwellen
vorkommen.
6 Antennenkonzepte für enge Bauräume
190
Abbildung 6-15: Empfangsleistung der Feig-UHF-Patchantenne
Speziell die breitbandige Auslegung der Feig-Antenne ist für die Bewertung der
Breitbandigkeit der entwickelten Koaxialantenne von entscheidender Bedeutung.
In Abbildung 6-16 ist im direkten Vergleich bei identischen Versuchsrandbedingun-
gen die Empfangsleistung der entwickelten Koaxialdämpfung dargestellt.
Abbildung 6-16: Empfangsleistung der entwickelten Koaxial-Antenne
Dabei ist zu erkennen, dass der Verlauf sehr ähnlich zur der auf RFID-Anwendungen
im UHF-Bereich ausgelegten Feig-Antenne ist, wodurch die geometrische Auslegung
und Gestaltung der Antenne bestätigt wird. Das Maximum der Empfangsleistung ist
dabei zwar leicht unterhalb des Zielwertes von 868 MHz, aber durch den nahezu
6 Antennenkonzepte für enge Bauräume
191
konstanten Plateauverlauf der Empfangsleistung von 700 bis 950 MHz ist die Emp-
fangsleistung in diesem Bereich nahezu konstant.
Dadurch kann die Anforderung, die zu konstruierende Antenne auf 868 MHz abzu-
stimmen, verstärkt durch den vergleichbaren Kurvenverlauf mit der Referenzantenne
als erfüllt angesehen werden. Die im Rahmen der Anforderungsaufstellung geforder-
te maximale Zunahme der Dämpfung um 3 dBm im Bereich +/- 50 MHz zur Arbeits-
frequenz wird ebenfalls eingehalten und sogar unterschritten, wodurch die
konstruierte Koaxialantenne zum einen weltweit einsetzbar und zum anderen für die
metallhaltige Umgebung und die dadurch bedingte Beeinflussung der Antenne ge-
eignet ist.
Der Wert der Empfangsleistung der Koaxialantenne bei 868 MHz unter den vorlie-
genden Messbedingungen liegt bei 45,01 dBm und damit etwa 8,5 dB über der
Dämpfung der auf maximale Reichweite ausgelegten Feig-Antenne. Dadurch kann
auch die Bedingung nach einer Dämpfung im Vergleich zur Referenzantenne von
<10 dB erfüllt werden.
6.6.3 Messung der Reflexionsdämpfung
Im Folgenden werden der Versuchsaufbau und die Ergebnisse zur Messung der Re-
flexionsdämpfung der Koaxialantenne beschrieben.
6.6.3.1 Versuchsaufbau
Um die Reflexionsdämpfung einer angeschlossenen Antenne zu messen, wird eben-
falls der im Rahmen der Empfangsleistungsmessung beschriebene Spektrum-
Analyzer in Verbindung mit einem Trackinggenerator verwendet.
Allerdings müssen die beiden Messanschlüsse "RF output" und "RF input" durch eine
Messbrücke (Abbildung 6-17 zeigt die verwendete R&S Z2) verbunden werden.
Abbildung 6-17: Messbrücke R&S Z2 der Firma Rohde und Schwarz
6 Antennenkonzepte für enge Bauräume
192
Durch die Messbrücke wird die angeschlossene Antenne mit der durch den Tra-
ckinggenerator festgelegten Frequenz zum Schwingen gebracht, wodurch stehende
Wellen und damit die Reflexionsdämpfung direkt gemessen werden können. Die An-
tenne kann zur Messung beliebig im freien Raum positioniert werden.
Zusammenfassend sind die Einstellungen des Spektrum-Analyzers in Tabelle 6-5
dargestellt.
Tabelle 6-5: Einstellungen am Spektrum-Analyzer zur Messung der Reflexionsdämpfung
Einstellungen Spektrum-Analyzer
Widerstand an der Messbrücke 50 Ω
Center Frequency 868 MHz
Span 400 MHz
6.6.3.2 Reflexionsdämpfung der Koaxialantenne
Die Reflexionsdämpfung ist ein Indikator für Störeinflüsse. Bei Frequenzen, an denen
die Antenne eine hohe Reflexionsdämpfung aufweist, können sich störende stehen-
de Wellen schlechter ausbilden und gewährleisten eine hohe Leistungsfähigkeit der
Antenne.
Entsprechend Abbildung 6-18 weist die konstruierte Koaxialantenne eine gute Refle-
xionsdämpfung auf, deren Maximum knapp unter der Arbeitsfrequenz von 868 MHz
liegt. Mit einem Dämpfungswert von 50,27 dBm kann die Anforderung nach einer
Reflexionsdämpfung > 50 dBm knapp erfüllt werden. Mit Hilfe einer veränderten ge-
ometrischen Auslegung könnte diese noch verbessert werden, allerdings hat sich die
gewählte Auslegung im Praxistest (vgl. Kap. 6.7) bewährt.
6 Antennenkonzepte für enge Bauräume
193
Abbildung 6-18: Reflexionsdämpfung entwickelte Koaxialantenne
Des Weiteren bestätigt die Messung der Reflexionsdämpfung durch die hohe Dämp-
fung der stehenden Wellen im Bereich der Arbeitsfrequenz die korrekte Auslegung
der Antenne auf die Arbeitsfrequenz von 868 MHz.
6.6.4 Sicherstellung der Antennenrobustheit und der einfachen Handhabung
Zur Gewährleistung der Langlebigkeit der Antenne für den Einsatz in Motorraum zur
RFID-gestützen Bauzustandsdokumentation muss die konstruierte Antenne entspre-
chend der entwickelten Anforderungen eine hohe mechanische und chemische Sta-
bilität aufweisen.
Das mechanische schwächste Glied der Koaxialantenne bildet das freie Leiterstück.
Aus diesem Grund ist es notwendig, zur Erhöhung der mechanischen Stabilität das
freie Leiterstück zu verstärken, um ein Abknicken und Abbrechen zu verhindern. Als
zweckmäßig erweist sich hier die Verwendung von Kunststoff, beispielsweise Po-
lypropylen, da hierdurch die elektrischen Eigenschaften des Leiters und damit der
Antenne nur minimal verändert werden. Zur Verstärkung der aufgebauten Antennen
wurde im Rahmen der Arbeit für eine einfache prototypische Umsetzung die Leiter-
isolierung als zusätzliche Verstärkung entsprechend Abbildung 6-12 verwendet.
Eine weitere Maßnahme, um die Koaxialantenne widerstandsfähig gegen chemische
Einflüsse auszuführen und sie gegenüber ihrer Umgebung zu isolieren, stellt die
Ummantelung der Antenne mit einem Schrumpfschlauch dar. Besonders geeignet
erweisen sich hier Schrumpfschläuche aus Polylefinen ([AIC-03], einer Polymer-Art,
6 Antennenkonzepte für enge Bauräume
194
die sich neben ihrer Isolationsfähigkeit durch eine gute chemische Beständigkeit aus-
zeichnet (vgl. Abbildung 6-19).
Abbildung 6-19: Koaxialantenne mit Kunststoffummantelung
Um zusätzlich die Positionierung der Antenne im Motorraum zu verbessern, ist es
zielführend, die Antenne mit einem Kunststoffstab als Verlängerung zu versehen.
Dadurch wird die exakte Positionierung der Antennen im Motorraum ermöglicht und
damit die Handhabbarkeit verbessert. Abbildung 6-20 zeigt beispielhaft die prototypi-
sche Umsetzung der Koaxialantenne mit einem verlängerten Kunststoffstab von 50
cm Länge.
Abbildung 6-20: Koaxialantenne mit einer 50cm-Kunststoffverlängerung
6.7 Praktische Evaluierung der Koaxialantenne
Nach der Auslegung und Ausgestaltung der Koaxialantenne wird im Folgenden die
Leistungsfähigkeit der Antenne auf Basis einer praktischen Evaluierung bewertet.
6.7.1 Versuchdurchführung
Der Versuchsaufbau zur praktischen Evaluierung der entwickelten Koaxialantenne ist
identisch mit dem Aufbau zur Evaluierung der Leistungsfähigkeit des Identifikations-
szenarios „offenes Fahrzeug scannen“ in Kapitel 5.3. Dadurch sind die Ergebnisse
der Koaxialantenne direkt mit den Ergebnissen der Referenzantenne der Firma Feig
vergleichbar, wodurch die Leistungsfähigkeit der Koaxialantenne umfassend bewer-
tet werden kann
Die entwickelte Koaxialantenne wurde für den Einsatz in engen Bauräumen entwi-
ckelt, so dass im Rahmen der Evaluierung der Fokus auf den 22 im Motorraum ge-
kennzeichneten Komponenten lag.
6 Antennenkonzepte für enge Bauräume
195
Zur Bewertung der Erfassungswahrscheinlichkeit der gekennzeichneten Bauteile
wurden die bereits in Kapitel 5.3 aufgestellten Bewertungskriterien herangezogen.
Da sich aufgrund der geringeren Reichweite die Komponenten generell nur mit La-
gekenntnis des Transponders erfassen lassen, wurde im Rahmen der Evaluierung
das Kriterium „generell erfassbar“ nicht vergeben.
Analog zur Evaluierung des Erfassungsszenarios mit der Einzelantenne wurden je-
weils 50 Durchläufe durchgeführt, hinsichtlich des Bewegungsablaufes der Antenne
wurden folgende, in Abbildung 6-21 dargestellte Einstichpunkte in Motorraum defi-
niert, um die Koaxialantenne möglichst nahe an den jeweiligen Bauteilen zu platzie-
ren.
Abbildung 6-21: Einstichpunkte der Koaxialantenne zur Erfassung von im Motorraum verbau-
ten Komponenten
Da die Koaxialantenne im Vergleich zur Feig-Antenne einen geringeren Antennen-
gewinn aufweist, musste im Rahmen der Versuchsreihe die Leistung des Readers
angepasst werden. Die Berechnung der einzuspeisenden Leistung für die entwickelte
Koaxialantenne von Seiten des Readers ist im nächsten Abschnitt beschrieben.
6.7.2 Festlegung der Sendeleistung
Jede Antenne setzt die zugeführte Leistung in eine Abstrahlleistung um, die vom An-
tennengewinn und der -polarisation sowie den Kabelverlusten abhängt. Dies hat zur
6 Antennenkonzepte für enge Bauräume
196
Konsequenz, dass nicht jede Antenne, die mit einer bestimmten Leistung gespeist
wird, die gleiche Leistung abstrahlt.
Gesetzliche Vorschriften beziehen sich daher auf die tatsächlich von der Antenne
abgestrahlte Leistung bezogen auf eine Dipolantenne, die so genannte Radiated
Equivalent Power (ERP). Die für Europa geltenden Werte sind in Tabelle 2-4 aufge-
führt. Danach gilt für den hier relevanten Bereich von 865,6 MHz bis 867,6 MHz eine
Beschränkung auf 2,00 W ERP.
Darauf aufbauend ist die Berechnung der Leistungseinstellung für die Koaxialanten-
ne in Tabelle 6-6 dargestellt, wobei ein Anschlusskabel von 5 m berücksichtigt wird.
Tabelle 6-6: Berechnung der Ausgangsleistung am Reader für die entwickelte Koaxialantenne
radiated power 2.00 W ERP <> 33.00 dBm
correction factor ERP -> EIRP * 1.64 + 2.10 dB
Radiated Power isotrop = 3.28 W EIRP = 35.10 dBm
Antenna Gain 1.60 dBi - 1.60 dBi
Type of antenna 0.00 + 0.00 dB
cable losses 100m 55.00 dB5 2.75 dB + 2.75 dBm
radiated power = 36.25 dBm= 33.00 + 3.25 dBi
Sendeleistung in W am Reader ca. 2 x 2,00 W = 4.00 W
Einstellung am Reader 3.00 W maximum
Type of antenna:
linear antenna 0 "-0" dBm
circular antenna 1 "-3" dBm
Calculation RF Output Power
Entsprechend der durchgeführten Berechnung dürfte die Leistung am Reader 4 Watt
betragen. Da der im Rahmen der Tests verwendete Reader der Firma Feig lediglich
auf 3 Watt eingestellt werden kann, erreicht die Koaxialantenne die maximal zulässi-
ge Abstrahlleistung von 2 Watt ERP nicht.
Somit kann durch eine ideale Gestaltung des Readermoduls mit einer höheren Leis-
tung die Leistungsfähigkeit gegenüber der hier aufgezeigten praktischen Evaluierung
noch weiter verbessert werden.
6 Antennenkonzepte für enge Bauräume
197
6.7.3 Ergebnisse der Evaluierung
Im Rahmen der praktischen Evaluierung der entwickelten Koaxialantenne wurden
insgesamt 22 Bauteile im Motorraum mit Transpondern gekennzeichnet. Diese wur-
den in Kapitel 3.4 festgelegt.
Die bei 50 Messreihen ermittelte Leserate mit Hilfe der Koaxialantenne ist im direkten
Vergleich mit den Ergebnissen der Feig-Antenne in Abbildung 6-22 dargestellt.
12
13
6
22
0
5
10
15
20
25
Anz
ahl
Bau
teile
e
"Offenes Fahrzeugscannen"
"Scanpunkte"
Generell erfassbar
Erfassbar mit Lagekenntnis und Wiederholungszyklen
Schlecht erfassbar
Nicht erfassbar
Abbildung 6-22: Vergleich der Leserate der entwickelten Koaxial- und der Feig-Antenne von 12
im Motorraum befestigten Transpondern bei 10 Versuchsmessungen
Die entwickelte Koaxialantenne ermöglicht es, im Gegensatz zu der auf große Reich-
weite ausgelegten Feig-Antenne, durch die direkte Eindringung in den Motorraum
alle verbauten Transponder im vorliegenden Testszenario im Motorraum zu erfassen.
Durch die axiale Bauform und der Versteifung mit Hilfe des Kunststoffstabes ist dabei
im praktischen Einsatz eine exakte Positionierung im Motorraum gegeben, wodurch
auch stark eingebaute Komponenten, wie beispielsweise die Motorlagerkonsole, zu-
verlässig erfasst werden können. Sogar der gekennzeichnete Pralldämpfer, der sich
zwischen Kühler und Front-End befindet und damit fast vollständig verbaut ist, konn-
te durch den Einstichpunkt 10 sicher identifiziert werden (vgl. Abbildung 6-21).
Durch die lineare Polarisation der Koaxialantenne ist dabei aber eine stetige leichte
Antennenbewegung notwendig.
6 Antennenkonzepte für enge Bauräume
198
Ebenfalls zuverlässig und sicher konnte mit Hilfe der Koxialantenne der im Bereich
des Innenraums durch die Feig-Antenne nicht erfassbare Motor zur Sitzlängsverstel-
lung auf Basis der Antennenpositionierung unterhalb des Sitzes entsprechend
Abbildung 6-23 gelesen werden.
Abbildung 6-23: Erfassung des Motors zur Sitzlängsverstellung durch Positionierung der An-
tenne unterhalb des Sitzes
Durch die Leistung der Antenne im Rahmen der Messreihen wird die Auswahl und
Auslegung der Antenne bestätigt. Das Konzept der Koaxialantenne erfüllt somit die
Anforderungen zur Identifikation von Komponenten in engen Bauräumen und stellt
dadurch eine elementare Säule zur Realisierung der RFID-gestützten Bauzustands-
dokumentation dar. Die technische Machbarkeit der Identifikation von im Motorraum
verbauten Bauteilen ist auf Basis der Versuchsreihe nachgewiesen worden.
6.8 Zusammenfassung und Fazit
Im Rahmen des Kapitels ist mit der Koaxialantenne ein Antennenkonzept auf Basis
ausgewählter Kriterien ermittelt worden, das für den generellen Einsatz zur Identifika-
tion von Transpondern im Motorraum von Fahrzeugen oder engen Bauräumen ge-
eignet ist. Durch die Endspeisung und der damit verbundenen idealen Kabelführung
kann die Antenne einfach positioniert werden und ist zudem durch die Verwendung
von Schrumpfschläuchen und einer Verstärkung des Leiters vor mechanischen und
chemischen Belastungen geschützt. Im praktischen Test erweist sich das ausge-
wählte Antennenkonzept als äußerst leistungsfähig und bietet im Gegensatz zu han-
6 Antennenkonzepte für enge Bauräume
199
delsüblichen Patchantennen die Option, Transponder an verwinkelten engen Positio-
nen im Motorraum zu erfassen.
In Kombination mit der Erfassung von verbauten Komponenten mit Hilfe einer han-
delsüblichen UHF-Einzelantenne liegen damit Lesekonzepte vor, die eine durchgän-
gige Erfassung von verbauten Komponenten im Fahrzeug ermöglichen und das bei
einer Leserate von annähernd 100 %. Durch die praktische Evaluierung wurden die
beiden Konzepte validiert, so dass die technische Machbarkeit einer RFID-gestützen
Bauzustandsdokumentation nachgewiesen und verifiziert ist.
7 Zusammenfassung und Ausblick
200
Innovation, Derivatisierung, Individualisierung und Effizienzsteigerung stellen die
Schlüsselherausforderungen für die Automobilindustrie in den nächsten Jahren dar,
um im globalen Verdrängungswettbewerb verstärkt durch die Finanzkrise und der
daraus resultierenden negativen Wirtschaftsentwicklung bestehen zu können.
Die Bewältigung dieser Aufgaben bedingt eine ganzheitliche Optimierung auf allen
Ebenen des Produktentwicklungs- und Herstellungsprozesses. Ein zentraler Lö-
sungsbaustein zur Beherrschung der Variantenvielfalt und Komplexität stellt dabei
die durchgängige Transparenz in der Entwicklungs- und Lieferantenkette dar.
Der Einsatz der RFID-Technologie zur Kennzeichnung von Fahrzeugbauteilen
schafft hier durch die Verbindung von Material- und Informationsfluss neue Chancen
und Potenziale zur Steigerung der Effizienz und Informationsgüte. Durch die Mög-
lichkeit der Verfolgung der Komponenten ist über die Herstellung hinaus im After-
Sales-Bereich eine durchgängige Nachvollziehbarkeit der Fahrzeugkonfiguration und
-historie gegeben.
Die Kennzeichnung und Erfassung von Fahrzeugeinzelteilen - insbesondere im
Fahrzeug - ist aber aufgrund der negativen Auswirkungen von Metall auf die Leis-
7 Zusammenfassung und Ausblick
7 Zusammenfassung und Ausblick
201
tungsfähigkeit von RFID-Systemen mit vielschichtigen Herausforderungen behaftet
und nicht mit einem auf dem Markt erhältlichen Standardsystem lösbar.
Das Ziel der Arbeit war daher die Entwicklung von technischen Konzepten zur Kenn-
zeichnung und Identifikation von verbauten Bauteilen im Fahrzeug mit Hilfe der
RFID-Technologie und der Nachweis der technischen Machbarkeit einer RFID-
gestützten Bauzustandsdokumentation.
Daraus resultieren die folgenden zwei zentralen Anforderungen:
• Sämtliche kennzeichnungsrelevante Bauteile müssen unabhängig von ihrem
Werkstoff und eine Beeinflussung ihrer Eigenschaften gekennzeichnet werden
können.
• Die Erfassung der gekennzeichneten Bauteile muss im verbauten Zustand
möglich sein.
Während für die Kennzeichnung von Objekten aus Kunststoff und für Elastomere
bereits technische Konzepte und Umsetzungen auf dem Markt existieren, sind die
derzeit verfügbaren mobilen Datenträger zur Aufbringung auf Metall aufgrund ihrer
Abmessungen und Bauform im Wesentlichen für den Einsatz auf Behälterebene ge-
eignet. Die Anforderungen für eine direkte Kennzeichnung auf Bauteilebene ohne
Veränderung der Bauteileigenschaften erfüllen sie daher nicht.
Im Rahmen der Arbeit wurde aufbauend auf einer detaillierten Evaluierung beste-
hender Lösungen, ein Konzept im UHF-Frequenzbereich zur Entkopplung des mobi-
len Datenträgers von leitfähigen Materialien mittels eines Spezialabsorbers
weiterqualifiziert, um die für den Anwendungsfall essenzielle Kennzeichnung von
metallischen Bauteilen zu ermöglichen. Im Rahmen einer praktischen Evaluierung
wurde der Nachweis erbracht, dass dieser Ansatz das Potenzial bietet, alle gestellten
Anforderungen für die Kennzeichnung metallischer Bauteile im vorliegenden Einsatz-
szenario zu erfüllen.
Zur Lösung der zweiten Herausforderung, der Identifikation von mit Transpondern
versehener im Fahrzeug eingebauter Einzelteile wurden verschiedene technische
Antennenkonzepte betrachtet beziehungsweise entwickelt und auf deren Eignung für
den Einsatz in der RFID-gestützten Bauzustandsdokumentation überprüft.
Die Vision der Erfassung der Komponenten während der Vorbeifahrt von außerhalb
des Fahrzeugs aufgestellter fester Antennen, ist aufgrund der annähernd geschlos-
senen Oberfläche der Fahrzeugkarosserie die einen Faradayschen Käfig darstellt,
bereits theoretisch nicht realisierbar. Dadurch sind im vorliegenden Einsatzfall Lese-
7 Zusammenfassung und Ausblick
202
konzepte zur Identifikation von verbauten Komponenten notwendig, bei denen die
Antenne nahe am Bauteil positioniert wird.
Mit Hilfe einer praktischen Evaluierung an einem repräsentativen Versuchsfahrzeug
mit gekennzeichneten Komponenten konnte im Rahmen der Arbeit gezeigt werden,
dass durch den Einsatz einer Einzelantenne und deren nahes vorbeiführen an den
jeweiligen Bauteilen eine zuverlässige Erkennung von Bauteilen im Innenraum und
Unterboden des Fahrzeug realisierbar ist. Lediglich fast vollständig vom Metall um-
gebene Bauteile, wie beispielsweise die Türverstärkung zwischen Türaußen- und
-innenblech, sind nicht erfassbar. Im Bereich des Motorraums hingegen stößt das
Konzept aufgrund der Antennenbaugröße und des dadurch bedingten Abstands zu
den jeweiligen mobilen Datenträgern an seine Grenzen. Dementsprechend können in
diesem Bereich nur nahe an der Oberfläche liegende Bauteile erkannt werden. Für
die Identifikation von im Motorraum verbauten Komponenten ist ein anderes Konzept
notwendig, bei dem die Antenne direkt in den Bauraum eingebracht werden kann.
Hierfür ist die kompakte Bauform der Antenne eine grundlegende Voraussetzung. Da
es derzeit auf dem Markt kein dafür geeignetes Antennenkonzept für RFID-Systeme
im UHF-Bereich gibt, ist im Rahmen der Arbeit auf Basis eines Vergleichs eine An-
tenne in Koaxialbauform entwickelt worden, die für den generellen Einsatz zur Identi-
fikation von Transpondern im Motorraum von Fahrzeugen oder engen Bauräumen
geeignet ist. Durch die praktische Evaluierung am Versuchsfahrzeug konnte der
Nachweis der Eignung für den Einsatz zur Erfassung von im Motorraum verbauter
Komponenten erbracht werden.
Durch die gezielte Kombination der beiden Identifikationskonzepte für den Innen- und
den Motorraum wird eine durchgängige Erfassung von verbauten Komponenten im
Fahrzeug ermöglicht. Durch die Validierung an einem realen Versuchsfahrzeug
konnte die technische Machbarkeit einer RFID-gestützen Bauzustandsdokumentati-
on nachgewiesen werden.
Die Arbeit legt damit den ersten Grundstein für den Einsatz der Technologie in der
Automobilindustrie. Bei den aufgezeigten und entwickelten technischen Lösungsan-
sätzen handelt es sich aber um Konzepte, die für einen Einsatz konsequent in Rich-
tung Serienproduktion weiter entwickelt werden müssten
Um darüber hinaus die Integration der Technologie im unternehmensweiten Netz-
werk zu ermöglichen, ist die Entwicklung und Anpassung von Prozessen unabding-
bar. Durch eine Technologie kann ein Prozess lediglich unterstützt und nicht
7 Zusammenfassung und Ausblick
203
bestimmt werden. Darüber hinaus ist zur Gestaltung effizienter und wirtschaftlicher
RFID-Strukturen und Informationsflüsse die Erarbeitung wirtschaftlicher Grundmodel-
le auf Basis von Standardprozessen notwendig.
Der Einsatz in der Automobilindustrie wird sich zudem erst durch eine weitere Re-
duktion der Produktionskosten von mobilen Datenspeichern bei gleichzeitiger Gene-
rierung von Optimierungspotenzialen über alle Wertschöpfungsstufen ökonomisch
realisieren lassen. Dieser wird sich in einem ersten Schritt bei dokumentations-, ei-
genschaftsverantwortlichen und sicherheitskritischen Bauteilen ergeben.
Die Einführung der RFID-Technologie in einem Unternehmen ist aus wirtschaftlichen
und auch als technologischen Gründen durch Politprojekte in abgeschlossenen Be-
reichen anzustreben. In der Automobilindustrie bietet sich hierfür eine Anwendung in
der Fahrzeugenwicklung an. Durch den wesentlich höheren Teilepreis und den dy-
namischeren und ungeführteren Prozess im Rahmen der Bauteileigenschaftsent-
wicklung ergeben sich größere Nutzenpotenziale durch eine Steigerung der
Transparenz.
Die Technologie kann dann auf Basis von Technologie- und Preisentwicklung Schritt
für Schritt in die aus Prozesssicht anforderungskritischere Serienproduktion integriert
werden, um langfristig die Vision der selbststeuernden Bauteile im unternehmens-
übergreifenden Netzwerk Realität werden zu lassen.
8 Literatur
204
[AGG-02] Alexander, K.; Gilliam, T.; Gramling, K.; Kindy, M.; Moogimane, D.; Schlutz, M.; Woods, M.: Focus on the Supply Chain: Applying Auto-ID within the Distribution Center Internet: http://www.autoid.org/SC31/clr/ 200305_3824_PWC%20DC.pdf, zuletzt abgerufen: 25.02.2008
[AIC-03] Aichele, E.; Hamjediers, O.; Moskob, F.: Wire Harness Assembly with Routing Sleeve European Patent EO 1339148 Bretten-Gölshausen, 2003
[AIM-00] Association for Automatic Identification und Mobility (AIM): Draft Paper on the Characteristics of RFID-Systems. In: Frequency Forums 2000:001 Ver 1.0 (Hrsg.: AIM, Inc.) Pittsburgh (USA), 2000
[AIM-07] AIM Deutschland e.V: Der Einsatz von RFID Technik – Aspekte der RFID Nutzung im indus-triellen Umfeld Internet: www.aim-d.de, zuletzt abgerufen: 11.01.2008
[ATK-07] Soellner, F.; Rattey, F.; Lange, G: Vollgas oder Stop-and-go? Deutsche Automobilhersteller im interna-tionalen Wachstumsvergleich. A.T. Kearney GmbH, Düsseldorf, 2007. Internet: http://www.atkearney.de, zuletzt abgerufen: 13.11.2007
[AUD-07] AUDI AG: Homepage Internet: http://www.audi.de, zuletzt abgerufen: 18.10.2007
[AUT-02] Auto-ID-Center: Das neue Netzwerk. Identifizieren Sie jedes Objekt – automatisch und überall Internet: http://www.epcglobal.ch/downloads/ GERMAN_AUTO_ID_CENTER.pdf, zuletzt abgerufen: 25.02.2008
[BAC-06] Bachmann, H.; Gizanis, D.: RFID: Potenziale im Behälter-Management. In: Computerwoche 33 (2006), Nr. 42, S. 50-51
[BER-05] Barginda, K.; Cichorowski, G.; Assmann; R.; Führ, M: Potentiale “smarter” Produktkennzeichnung – Technische Entwick-lung und Anforderungen des Elektro-Gesetzes. In: Sofia Diskussionsbeiträge zur Institutionsanalyse Nr. 05-1 Darmstadt, 2005
[BER-99] Bergmann, L.; Schäfer, C.; Raith, W.: Lehrbuch der Experimentalphysik – Band 2 Elektromagnetismus Walter de Gruyter, Berlin, 1999
[BIT-06] Bundesverband Informationswirtschaft Telekommunikation und neue Medien e.V.: White Paper RFID 2006 – Technologien, Systeme und Anwendun-gen. Internet: http://www.Bitkom.de, zuletzt abgerufen: 02.02.2008
[BOP-08] Boppert, J.: Entwicklung eines wissensorientierten Konzepts zur adaptiven Logistikplanung. Dissertation, Lehrstuhl für Fördertechnik Materialfluss Logistik, TU München, ISBN: 978-3-9811819-4-4
[BSI-04] Bundesamt für Sicherheit in der Informationstechnik: Risiken und Chancen des Einsatzes von RFID-Systemen Ingelheim, 2004 Internet: http://www.bsi.bund.de/fachthem/RFID/RIKCHA.pdf, zuletzt abgerufen: 08.01.2008
[CDG-02] Chappell, G.; Durdan, D.; Gilbert, G.; Ginsburg, L.; Smith, J.; Tobol-ski, J.: Auto-ID on Delivery: The Value of Auto-ID Technology in Retail Sup-ply Chains Internet: http://www.autoid.org/SC31/clr/ 200305_3828_Accenture%20BCA%202.pdf, zuletzt abgerufen: 25.02.2008
[CGS-02] Chappell, G.; Ginsburg, L.; Schmidt, P.; Smith, J.; Tobolski, J.: Auto-ID on the line: The Value of Auto-ID Technology in Manufactur-ing Internet: http://www.autoidlabs.org/uploads/media/ACN-AUTOID-BC005.pdf, zuletzt abgerufen: 25.02.2008
[CJH-05] Clasen, M.; Jansen, R.; Hustadt, J.: Aktueller Status der Standardisierung bei RFID-Anwendungen für die Logistik. In: Decker, J.; Seifert, W. (Hrsg.): RFID in der Logistik – Erfolgsfakto-ren für die Praxis. Deutscher Verkehrs-Verlag, Hamburg u.a. , 2005, S. 61-85
[CLA-06] Clasen, M.: Durch RFID/EPC zum Internet der Dinge Internet: http://www.info-rfid.de/downloads/070316_clasen.pdf, zuletzt abgerufen, 20.12.2008
[CLA-06a] Clasen, M.: Das EPCglobal-Netzwerk – Ein Werkzeug zur Rückverfolgung in Echtzeit Internet: http://www.preagro.de/ezai/index.php/eZAI/article/view/9/6, zuletzt abgerufen: 20.12.2008
[DIC-07] Dick, M.: Simulation im Automobilbau Vortrag im Rahmen der Vorlesung: „Straßenfahrzeuge – Entwurf und Simulation“ Technische Universität München, 09.01.2007
[DUD-07] Dudenhöffer, F.: Die Welt fährt dem Autoland Deutschland davon In: Neue Ruhrzeitung, 18.07.2007
[DYC-07] Dyczij-Edlinger, R.: Theoretische Elektrotechnik I. Vorlesungsskriptum Universität Saarland, 2007
[DZI-97] Dziggel, K.: The SOFIS Auto-ID Identification System Vortragsmanuskript zu SMAID 97 Universität Dortmund, 1997
[EBE-03] Ebel, P.; Hofer, M.; Al-Sibai, J.: Herausforderungen der Automobilindustrie In: Ebel, P; Hofer, M.; Al-Sibai, J. (Hrsg.): Automotive Management – Strategie und Marketing in der Automobilwirtschaft. Springer Verlag, Heidelberg u.a., 2003, S. 3-12.
[EPC-07b] EPCglobal Inc: Pressemitteilung: EPCglobal und GS1 Germany – ein Blick hinter die Kulissen Internet: http://www.gs1-germany.de/internet/content/e39/e52/e2151/ e2477/e3759, zuletzt abgerufen: 25.02.2008
[EUR-07] Kommission der Europäischen Gemeinschaften: Bericht der Kommission an den Rat und das europäische Parlament über die Ziele nach Artikel 7 Absatz 2 Buchstabe b der Richtlinie 2000/53/EG des europäischen Parlaments und des Rates über Alt-fahrzeuge Internet: http://www.parlament.gv.at/cgi-bin/eukp.pdf?P_EU=XXIII.pdf/EU/00/57/005710.pdf, zuletzt abgeru-fen: 20.12.2008
[FIN-06] Finkenzeller, K.: RFID Handbuch – Grundlagen und praktische Anwendungen indukti-ver Funkanlagen, Transponder und kontaktloser Chipkarten, 4. Auflage Carl Hanser Verlag, München, 2006
[FLE-03] Fleisch, E.; Dierkes, M.: Betriebswirtschaftliche Anwendungen des Ubiquitous Computing – Beispiele, Auswirkungen und Visionen. In: Mattern, F. (Hrsg.): Total vernetzt – Szenarien einer informatisier-ten Welt Springer Verlag, Heidelberg, 2003, S. 143-157
[FLE-04] Fleisch, E.; Tellkamp, C.; Thiesse, F.: Intelligente Waren beschleunigen Prozesse In: IO New Management, Nr. 12/2004
[FLÖ-05] Flörkemeier, Chr.: EPC-Technologie – vom Auto-ID Center zu EPCglobal In: Fleisch, E.; Mattern, F.: Das Internet der Dinge Springer Verlag, Berlin, 2005
[FLO-09] Fachgebiet Logistik, TU Dortmund: Bestimmung der optimalen Positionierung radiofrequenter Identifikati-onsmittel in Lager-, Kommissionier- und Transportbehältern (BE-OPRIL). Forschungsvorhaben, Dortmund, 2009.
[FRA-06] Franke, W.; Dangelmaier, W.: RFID – Ein Leitfaden für die Logistik Gabler Verlag, Wiesbaden, 2006
[FRI-01] Friedrich, U.; Annala, A.: Palomar – a European answer for passive UHF RFID applications RFID Innovation 2001 conference, London
[GAU-05] Gaukler, G.; Hausmann, W.: RFID in assembly operations: process and quality savings Department of Management Science and Engineering Stanford University, 2005
[GOE-06] Götz, T.; Safai, S.; Beer, P.: Effiziente Logistikprozesse mit SAP RFID In: SAP-Heft, Nr. 23 Bonn, 2006
8 Literatur
210
[GRE-06] Gregori, G.: Grenzen der RFID-Technologie in der Logistik In: Engelhardt-Nowitzki, C.; Lackner, E. (Hrsg.):Chargenverfolgung. Deutscher Universitäts-Verlag, Wiesbaden, 2006, S. 95-103
[GRU-05] Gruber, K.: Langstreckenspezialisten gehören die Zukunft In: RFID im Blick, Nr. 10/2005, Amelinghausen
[GS1-07] GS1 Germany: Basiskomponenten eines RFID-Systems Internet http://www.gs1-germany.de/internet/content/produkte/ epcglobal/epc_RFID/technik/index_ger.html, zuletzt abgerufen: 14.02.2008
[GÜN-07] Günthner, W. A.: Materialflusstechnik Vorlesungsskriptum: Lehrstuhl für Fördertechnik Materialfluss Logistik Technische Universität München, 2007
[GÜN-07a] Günthner, W. A.; Heptner, K.: Technische Innovationen für die Logistik Huss-Verlag, München, 2007
[GÜN-07b] Günthner, W. A.; Fischer, R.; Wagner, J.: Werkzeuge zur Nutzung von RFID In: Technik in Bayern, Nr. 02/07
[GÜN-07c] Günthner, W. A.; Wagner, J.: RFID – Die Zukunftstechnologie der Logistik In: Logistik und Verkehr in Bayern, 2007
[HAE-04] Haberger, K.: Funktionsweise der RFID-Technologie allgemein. In: Fraunhofer Institut Materialfluss und Logistik (Hrsg.): RFID 2004 – Logistiktrends für Industrie und Handel Verlag Praxiswissen, 2004
[HAN-06] Hansen, W.-R.; Gillert, F.: RFID für die Optimierung von Geschäftsprozessen Carl Hanser Verlag, München u.a., 2006
[HAR-03] Harms, P.: Kundenorientierte Fahrzeugentwicklung mit Methoden des QFD In: Ebel, P.; Hofer, M.; Al-Sibai, J. (Hrsg.): Automotive Management –
8 Literatur
211
Strategie und Marketing in der Automobilwirtschaft. Springer Verlag, Heidelberg u.a., 2003, S. 273-290
[HAW-03] McKinsey: HAWK 2015 - Knowledge-based changes in the automotive value chain Germany, 2003
[HER-04] Herter, E.; Lörcher, W.: Nachrichtentechnik Carl Hanser Verlag, München u.a., 2004
[HER-08] Herten, G.: Experimentalphysik I und II Vorlesungsskriptum: Physikalisches Institut Universität Freiburg, 2008
[HUD-99] Huder, B.: Einführung in die Radartechnik B.G. Teubner, Stuttgart, 1999
[HUS-06] Hustadt, J.: Standards für RFID-Systeme – eine Bestandsaufnahme. In: Packreport 39, 2006
[IBF-04] Institut für Betriebswissenschaften und Fabriksysteme (IBF) – Techni-sche Universität Chemnitz: Integration der Transpondertechnologie zur Erhöhung der Leistungs-fähigkeit der operativen Produktionssteuerung. In: Wissenschaftliche Schriftenreihe (IBF), Heft 38 Chemnitz, 2004
[IHM-06] Ihme, J.: Logistik im Automobilbau Carl Hanser Verlag, München u.a., 2006
[IML-04] Fraunhofer Institut Materialfluss und Logistik: RFID 2004 – Logistiktrends für Industrie und Handel Praxiswissen, Dortmund, 2004
[IML-09] Fraunhofer Institut Materialfluss und Logistik: Prüfung der neuen RFID-Boxen des Info-Box Systems. Forschungsvorhaben, Dortmund, 2009
[INO-07] Forum Innovationsreport: Autokäufer haben eine immer geringere Marken und Händlerbindung. Internet: http://www.innovations-report.de/html/berichte/
[KER-06] Kern, Chr.: Anwendung von RFID-Systemen Springer-Verlag, Berlin u.a., 2006
[KLE-04] Kleist, R.; Chapman, T.; Sakai, D.; Jarvis, B.: RFID Labeling: Smart Labeling Concepts & Applications for the Con-sumer Packaged Goods Supply Chain (Paperback) Banta Book Group, Irvine, 2004
[KLU-01] Klußmann, K.: Lexikon der Kommunikations- und Informationstechnik, 3. Auflage Hüthig Telekommunikation, Heidelberg, 2001
[KOL-00] Kolnsberg, S.: Drahtlose Signal- und Energieübertragung mit Hilfe von Hochfre-quenztechnik in CMOS-Sensorsystemen Dissertation, Fraunhofer Institut für Mikroelektronische Schaltungen und Systeme, Duisburg IRB Verlag, Krefeld, 2000
8 Literatur
213
[KRK-06] Kark, K.: Antennen und Strahlungsfelder: Elektromagnetische Wellen auf Lei-tungen, im Freiraum und ihre Abstrahlung Vieweg + Teubner Verlag, Wiesbaden, 2006
[LAM-05] Lampe, M.; Flörkemeier C.; Haller, S.: Einführung in die RFID-Technologie. In: Fleisch, E.; Mattern, F. (Hrsg.): Das Internet der Dinge Springer Verlag, Berlin u.a., 2005, S. 69-88
[LAN-07] Landr, J.: Shrouds of time – The history of RFID AIM Inc., Pittsburgh, 2007 Internet: http://www.aimglobal.org, zuletzt abgerufen: 19.12.2007
[LOV-07] Loving, S.; Anast, T.: Effective RFID goes unnoticed. In: Industrial embedded Systems Internet: htttp://www.industrial-embedded.com, zuletzt abgerufen: 24.01.2008
[MAN-06] Mannel, A.; Finger, M.: RFID auf Item-, Case- und Pallet-Ebene In: Förderzeuge und Hebemittel, Nr. 46 (2006), Berlin
[MAT-03] Mattes, B.; Meffert, H.; Landwehr, R.; Koers, M.: Trends in der Automobilindustrie – Paradigmenwechsel in der Zu-sammenarbeit zwischen Zulieferer, Hersteller und Händler.
8 Literatur
214
In: Ebel, P.; Hofer, M.; Al-Sibai, J. (Hrsg.): Automotive Management – Strategie und Marketing in der Automobilwirtschaft. Springer Verlag, Heidelberg u.a., 2003, S.13-39
[MEI-92] Lange, K.; Löcherer, K.-H.: Taschenbuch der Hochfrequenztechnik, 5. Auflage Springer Verlag, Berlin u.a., 1992
[MOE-07] Mößmer, H. E.; Schedlbauer, M.; Günthner W. A. : Die automobile Welt im Umbruch. In: Günthner, W. A. (Hrsg.): Neue Wege in der Automobillogistik - Die Vision der Supra-Adaptivität Springer Verlag, Berlin u.a., 2007, S. 3-15
[MOO-65] Moore, G.: Cramming more components onto integrated circuits In: Electronics 38, 04/1965, S. 114-117
[NXP-07] NXP Semiconductors: Ultra high frequency smart label ICs Internet: http://www.nxp.com/acrobat_download/literature/ 9397/75016225.pdf, zuletzt abgerufen: 25.02.2008
[OV-02] Ohne Verfasser: Log-Umfrage „Barcode versus Transponder“ In: Logistik für Unternehmen, Nr. 12/2002
[OVE-05] Overmeyer, L.; Vogeler, S.: RFID – Grundlagen und Potenziale Internet: http://www.logistics-journal.de, zuletzt abgerufen: 07.01.2008
[PAL-04] Palmer, M.: 7 Grundregeln eines effektiven Managements von RFID-Daten In: RFID-Forum Ausgabe 10/2004
[PAU-93] Paul, R.: Elektrotechnik 1 – Felder und einfache Stromkreise, 3. Auflage Springer Verlag, Berlin u.a., 1993
[PRE-08] Brooks Automation GmbH: Praktisches RFID Lesegerät mit USB-Anbindung von Brooks Automa-tion Internet: http://www.pressebox.de, zuletzt abgerufen: 02.04.2008
[RAD-04] Radtke, P.; Abele, E.; Zielke, A.E.: Die smarte Revolution in der Automobilindustrie: Das Auto der Zu-kunft – Optionen der Hersteller – Chancen für die Zulieferer Redline Wirtschaftsverlag, Frankfurt am Main, 2004
[RAF-06] Rafalski, L.; Horn K.: Barcode und RFID – friedliche Koexistenz der Systeme? In: ISIS RFID Special Report – Das aktuelle Anbieterverzeichnis zu RFID (Radio Frequency Identification) München, 2006
[REG-07] Regulierungsbehörde für Telekommunikation und Post: Short-range-devices Internet: www.regtp.de, zuletzt abgerufen: 05.02.2007
[REI-07] Reinhart, G.; Ostgathe, M.; Wiesbeck, M.: Einführungsstrategien für RFID in produzierende Unternehmen In: RFID in der Produktion – Wertschöpfung effizient gestalten Semi-narbericht iwb, Nr. 89 Garching, 2007
8 Literatur
216
[REN-76] Reinhard, G.: Der Einfluss metallischer Strukturen auf die Ausbreitung elektromag-netischer Wellen Technische Universität München, Fachbereich Elektrotechnik München, 1976
[RFJ-07] RFID-Journal: RFID Kosten Internet: http://www.RFID-journal.de, zuletzt abgerufen: 24.01.2008
[RFU-07] RFID Update: RFID is the Future for Thin-film & Printable Batteries Internet: http://www.RFIDupdate.com/articles/index.php?id=1479, zuletzt abgerufen: 25.02.2008
[RHE-08] Rhensius, T.: Den RFID-Einsatz planen und bewerten – Behältermanagement bei Zentis. Vortrag im Rahmen der Veranstaltung: Qualität, Transparenz, Kos-teneffizienz: RFID in der Logistik und bei Lebensmitteln. Aachen, Juni 2008.
[RIB-09] RFID im Blick: Behältermanagement. Internet: http://rfid-im-blick.de/RFID-Anwendungen/Behaltermanagement/, zuletzt abgerufen: 26.02.2009
[RIN-07] Rinza, T.; Boppert, J.: Logistik im Zeichen zunehmender Entropie In: Günthner, W. A. (Hrsg.): Neue Wege in der Automobillogistik - Die Vision der Supra-Adaptivität Springer Verlag, Berlin u.a., 2007, S. 17-28
[ROD-02] Rode, J. M.: Der Nachfolger des Barcodes steht schon in den Startlöchern In: Lebensmittelzeitung, Nr. 52, 2002
[RRY-08] RFID Ready: Homepage Internet: http://RFID-ready.de, zuletzt abgerufen: 25.12.2007
[SCH-07] Schmitt, R.: Einführung in den Maschinenbau Vorlesungsskriptum: Fraunhofer Institut Produktionstechnologie RWTH Aachen
[SCM-05] Schmitt, P.; Michahelles, F.: Strategische Wettbewerbsvorteile – RFID in der Logistik In: Management und Qualität, Nr. 11/2005, S. 8-10
[SHA-93] Schaumburg, H.: Einführung in die Werkstoffe der Elektrotechnik B. G. Teubner, Stuttgart, 1993
[SHJ-06] Schmidt, J.: Das TransiT-Modell zur Entscheidungsunterstützung für den RFID-Technologie-Einsatz in der textilen Kette Dissertation, Universität Dortmund Deutscher Fachverlag GmbH, Frankfurt am Main, 2006
[STA-05] Strasser, M.: RFID im Supply Chain Management Dissertation, Universität St. Gallen Deutscher Universitäts-Verlag, Wiesbaden, 2005
8 Literatur
218
[STO-03] Stockmar, J.: Erfolgsfaktoren für die Automobilzulieferer. In: Ebel, P; Hofer, M; Al-Sibai, J. (Hrsg.): Automotive Management – Strategie und Marketing in der Automobilwirtschaft. Springer Verlag, Heidelberg u.a., 2003, S. 61-77
[STR-05] Straube, F.; Dangelmaier, W.; Günthner, W. A.; Pfohl, Chr.: Trends und Strategien in der Logistik – Ein Blick auf die Agenda des Logistik-Managements 2010 Bundesvereinigung Logistik, Hamburg, 2005
[SWE-02] Sarma, S.; Weis, S.; Engels, D.: RFID Systems and Security and Privacy Implications In: Lecture Notes in Computer and Science, Vol. 2523 Springer Verlag, London, 2002
[TAG-08] Tagesspiegel Online: Toyota senkt Absatzziel für das Jahr 2009. Internet: http://www.tagesspiegel.de/wirtschaft/Unternehmen-Toyota-Autokrise;art129,2682310, zuletzt abgerufen: 20.05.2009
[TZI-07] Technologie Zentrum Informatik (TZI), Fraunhofer-Institut für Sichere Informationstechnologie, Fachgebiet Mikroelektronische Systeme (MES) der technischen Universität Darmstadt: RFID-Studie 2007 – Technologieintegrierte Datensicherheit bei RFID-Systemen Internet: http://www.tzi.de/fileadmin/resources/publikationen/ news/RFID-Studie_Final.pdf, zuletzt abgerufen: 25.02.2008
[VDA-05] Verband der deutschen Automobilindustrie e.V.: VDA-Empfehlung 5005: Vor- und Rückverfolgbarkeit von Fahrzeugtei-len und Identifizierbarkeit ihrer technischen Ausführung
8 Literatur
219
Frankfurt am Main, VDA, 2005
[VDA-05a] Verband der deutschen Automobilindustrie e.V.: VDA-Empfehlung 5501: RFID im Behältermanagement der Supply Chain Frankfurt am Main, VDA, 2005
[VDA-07] Verband der deutschen Automobilindustrie e.V.: Jahresbericht 2007 Internet: www.vda.de, zuletzt abgerufen: 13.11.2007
[VDA-07a] Verband der deutschen Automobilindustrie e.V.: Homepage Internet: www.vda.de, zuletzt abgerufen: 13.11.2007
[VDA-08] Verband der deutschen Automobilindustrie e.V.: VDA Band 1: Dokumentation und Archivierung, 3. Auflage Frankfurt am Main, 2008
[VDE-06] Verband der EDV-Software und –Beratungsunternehmen e.V.: Ma-nagment-Leitfaden für den Einsatz von RFID-Systemen Internet: http://www.vdeb.de/download/2006/Management-Leitfaden-RFID-2006-VDEB-AIM.pdf, zuletzt abgerufen: 25.02.2008
[VDI-06] Verein deutscher Ingenieure: VDI-Richtlinie 4472 – Anforderungen an Transpondersysteme zum Einsatz in der Supply Chain, Blatt 1: Allgemeiner Teil In: VDI-Handbuch Materialfluss und Fördertechnik, Band 5
[WAL-05] Walk, E.: RFID-Reader-Systems in production, logistics and retail Vortrag im Rahmen der Messe Interpack Düsseldorf, 2005











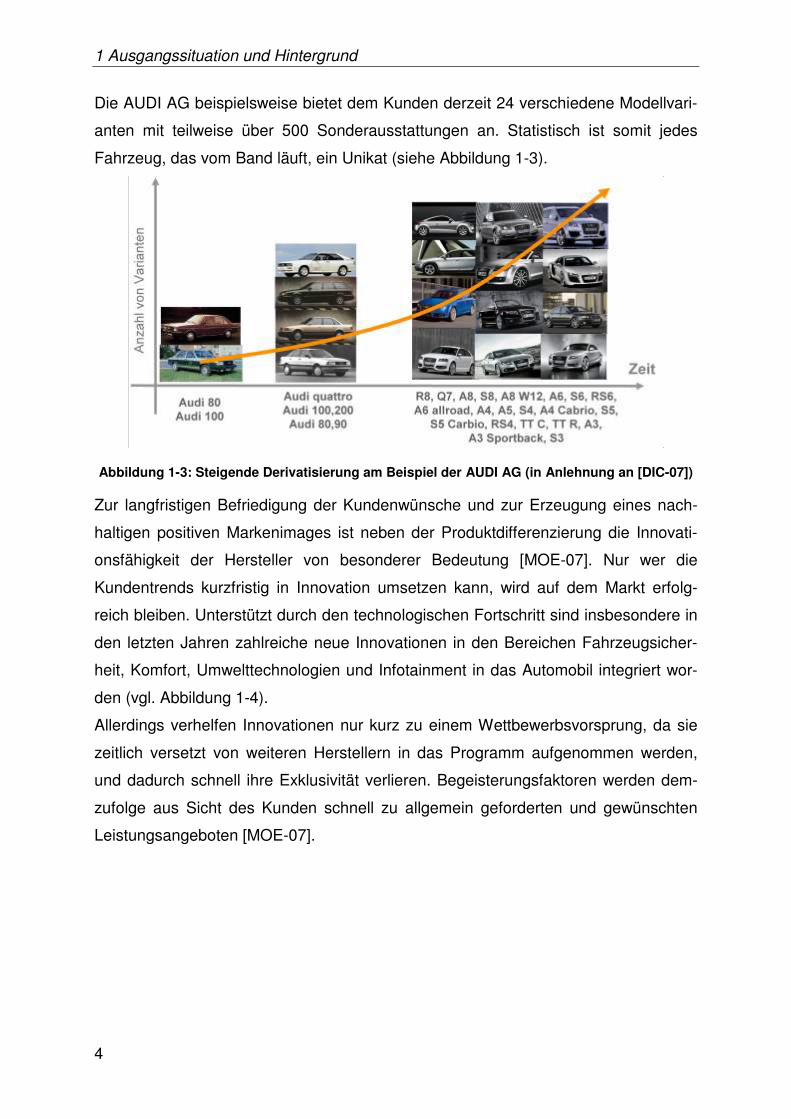
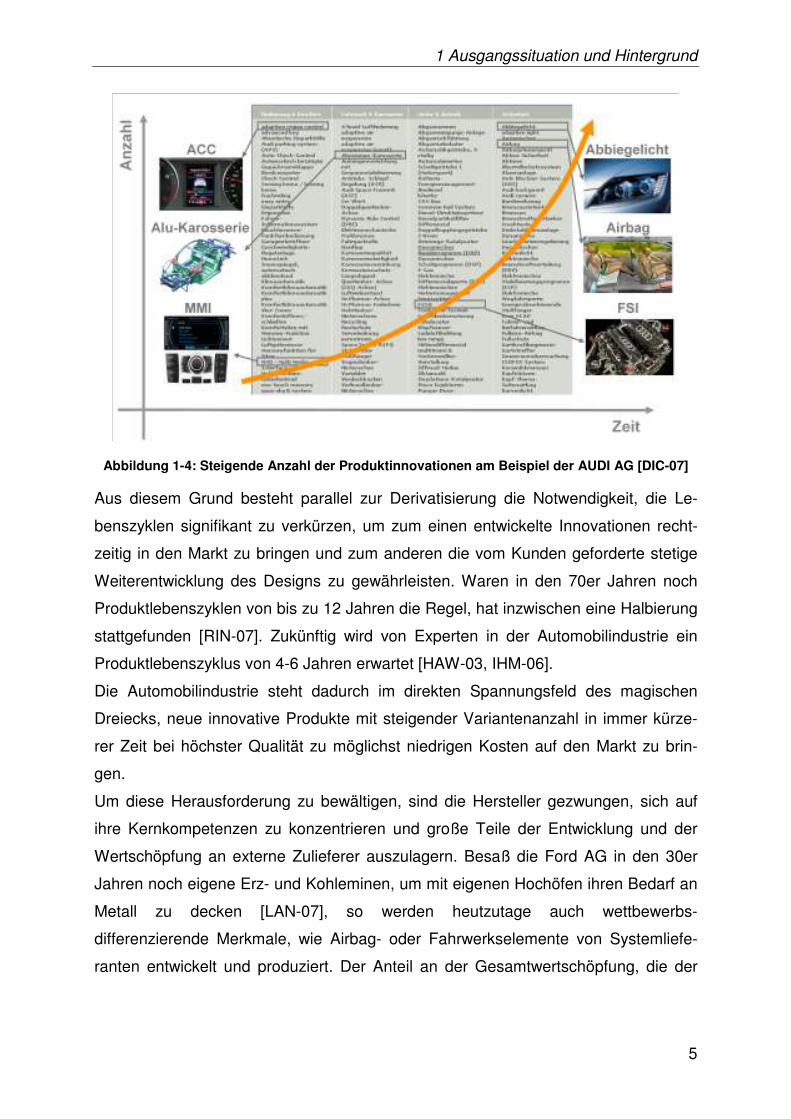
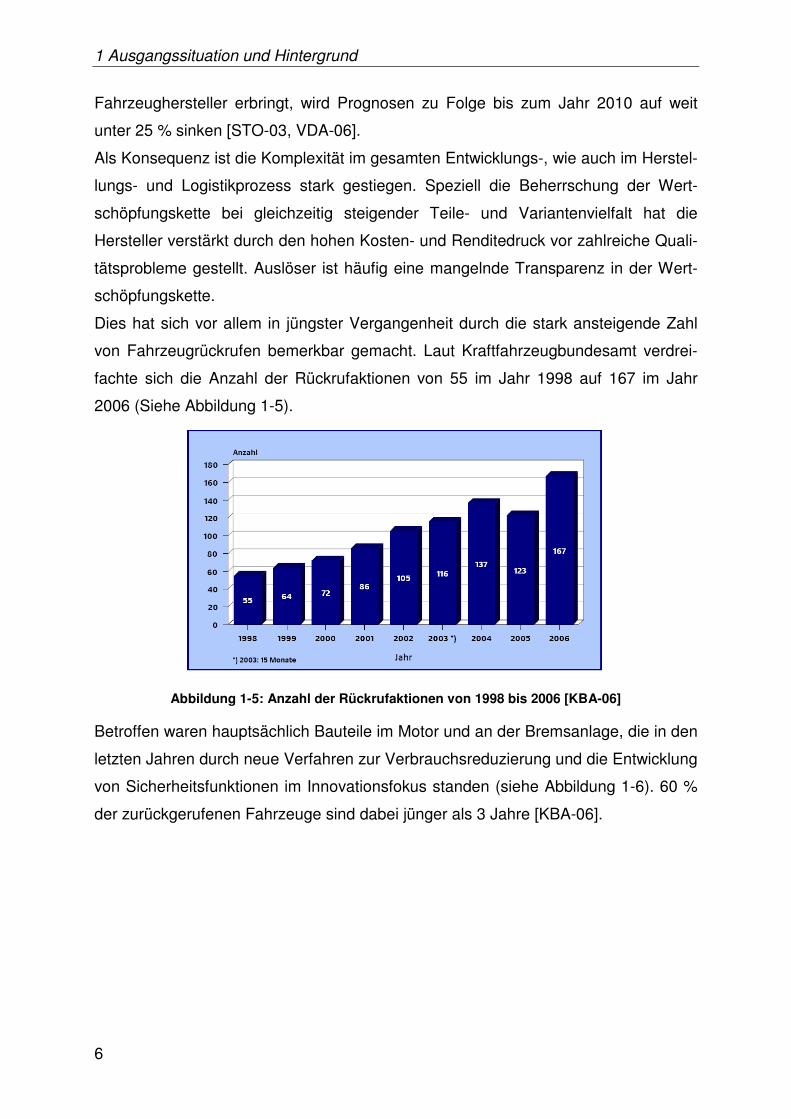
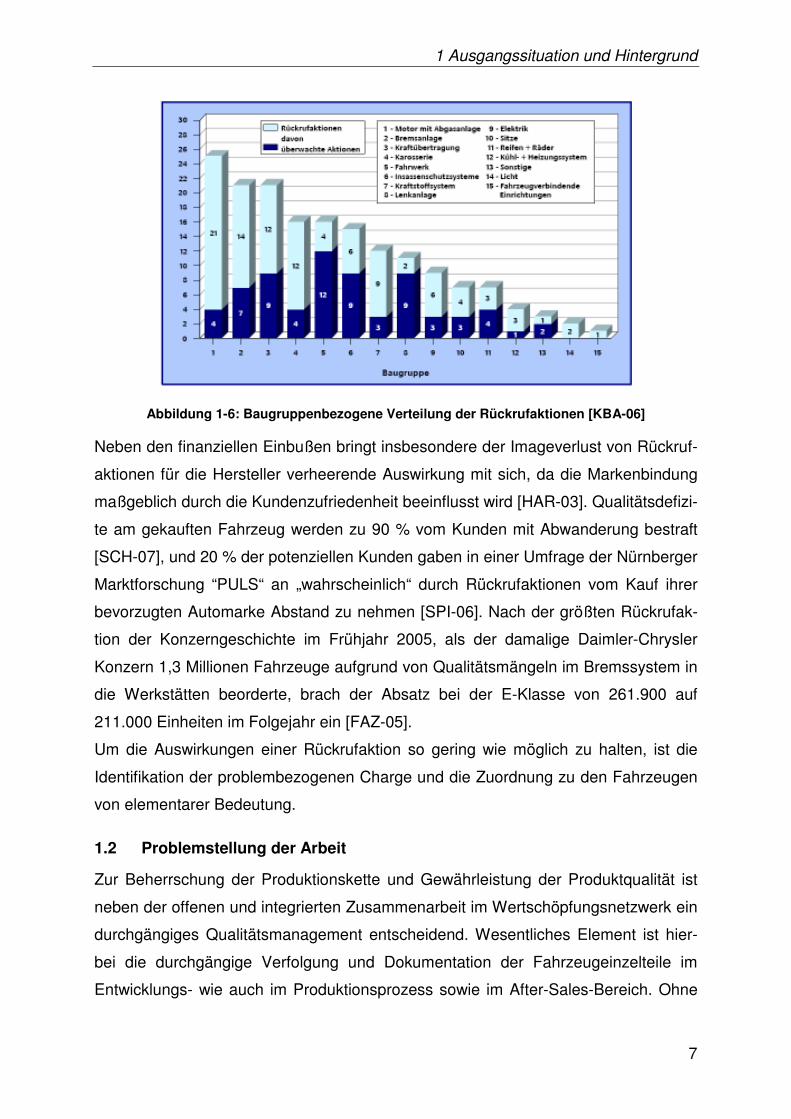
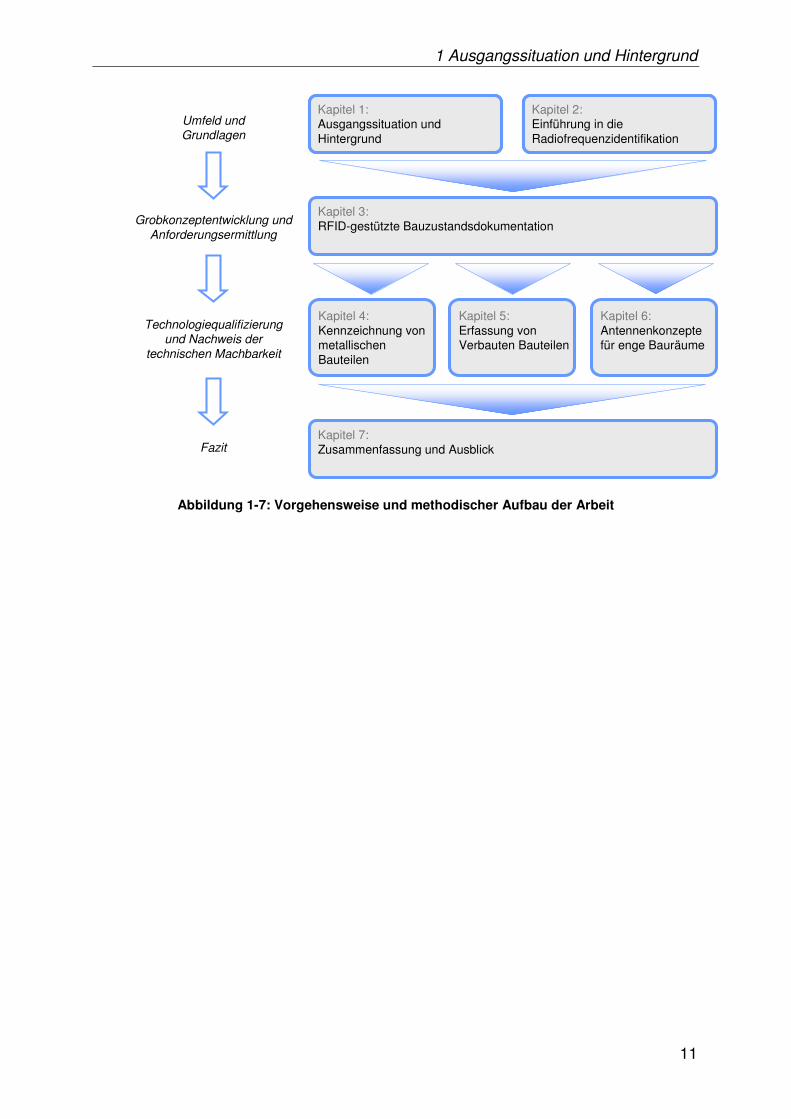
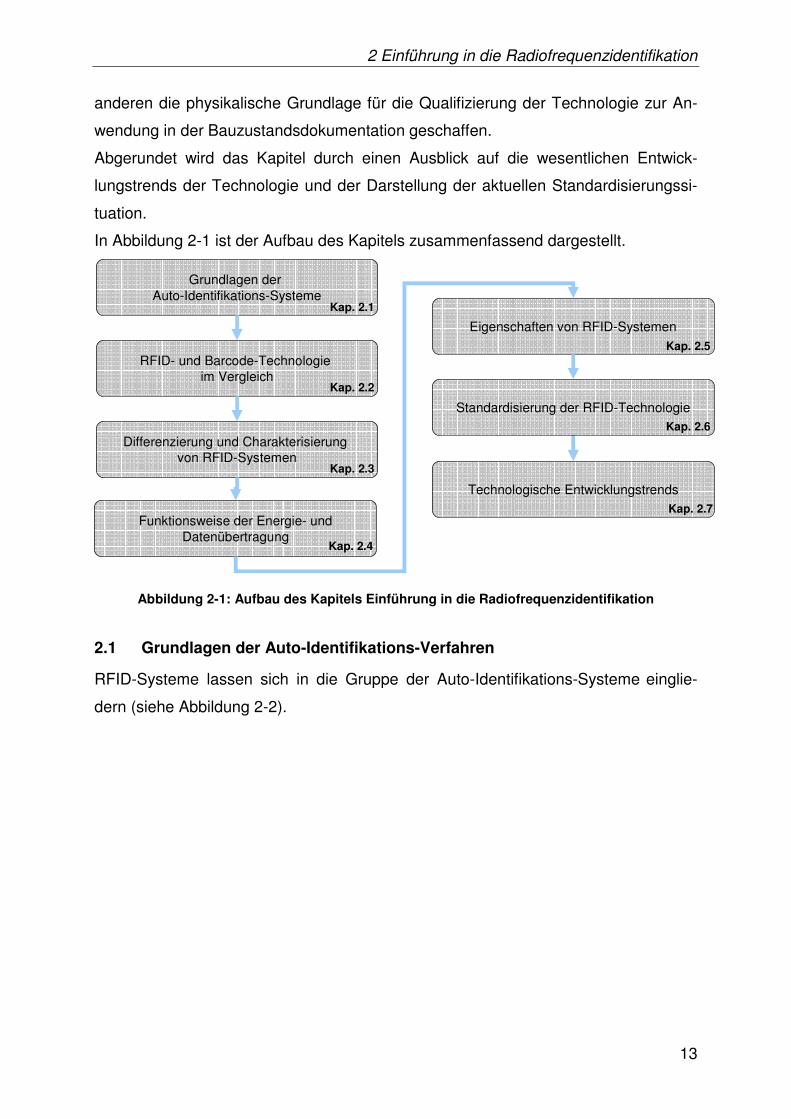




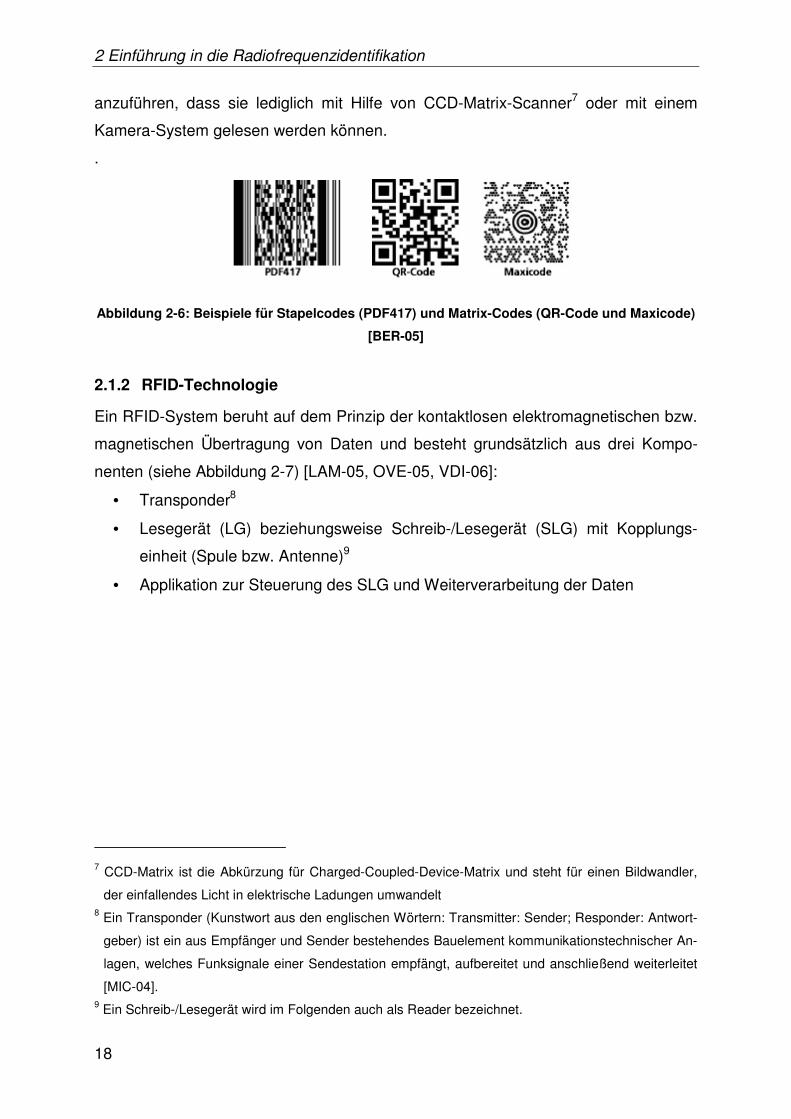
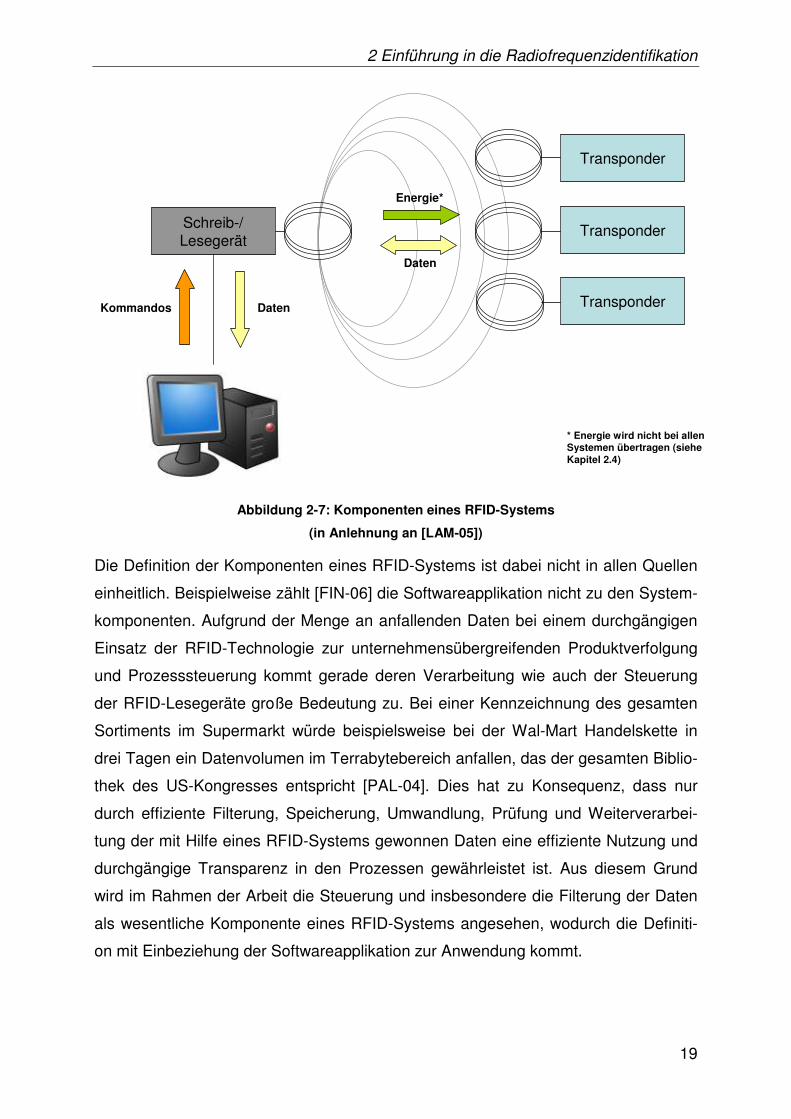





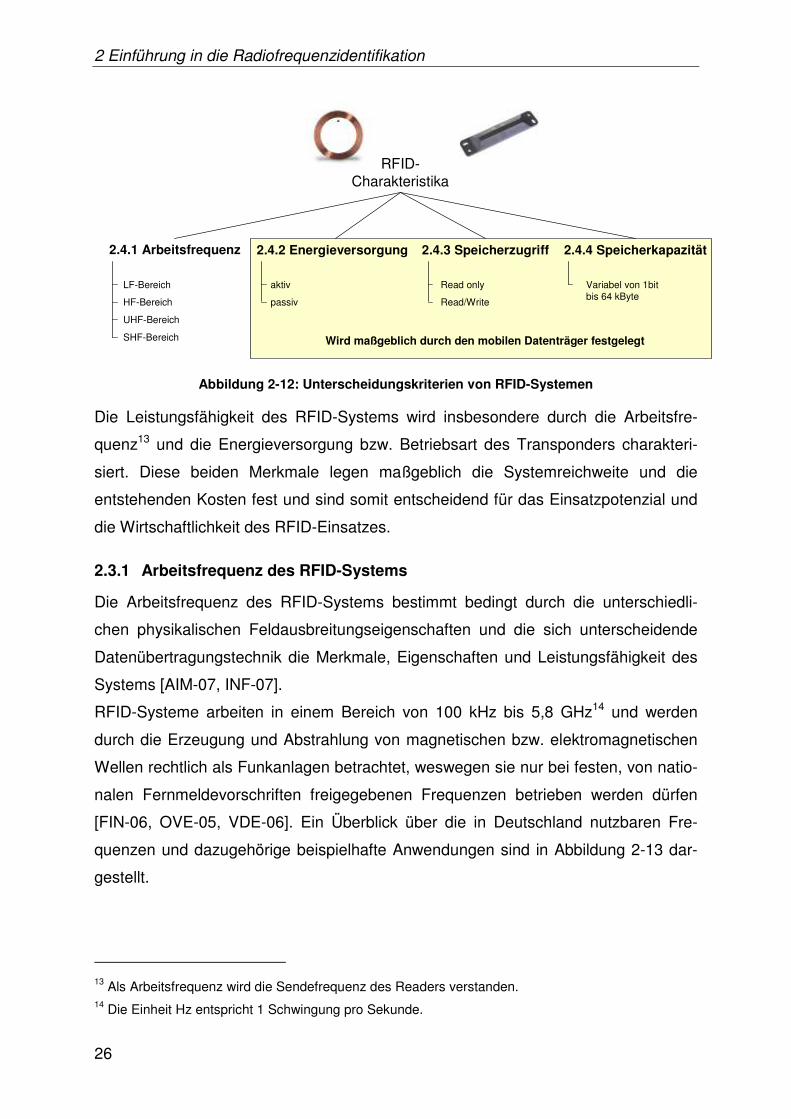
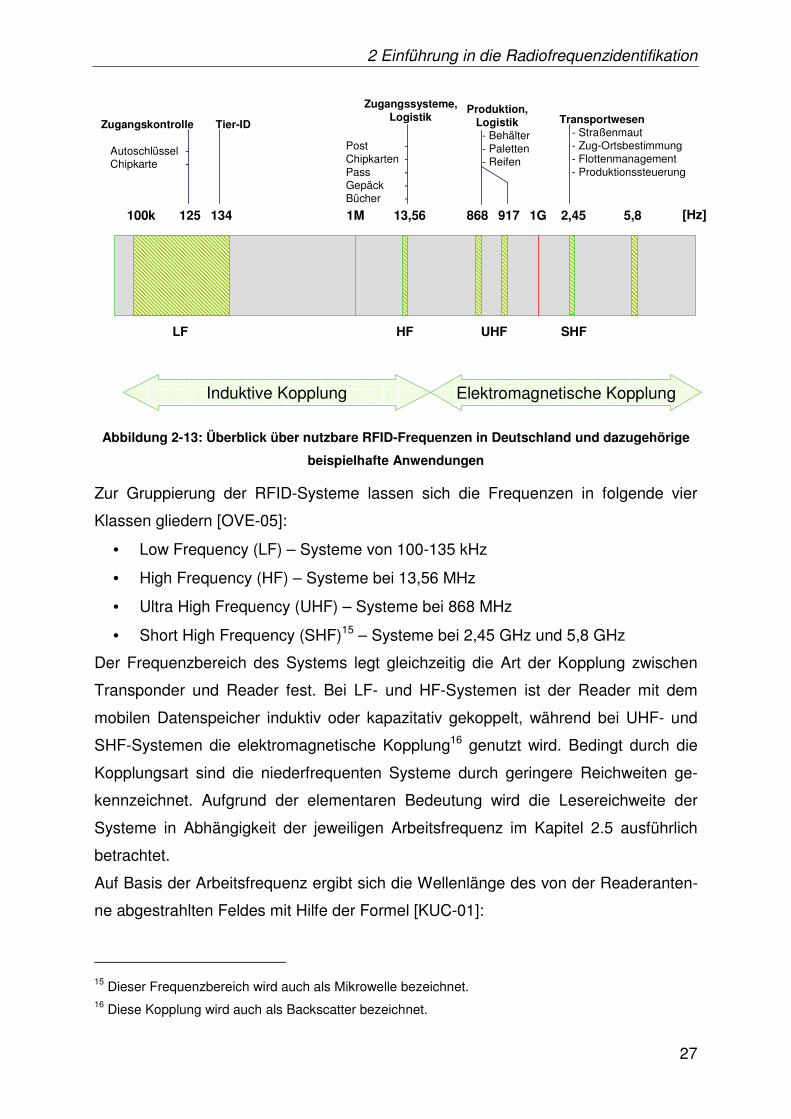
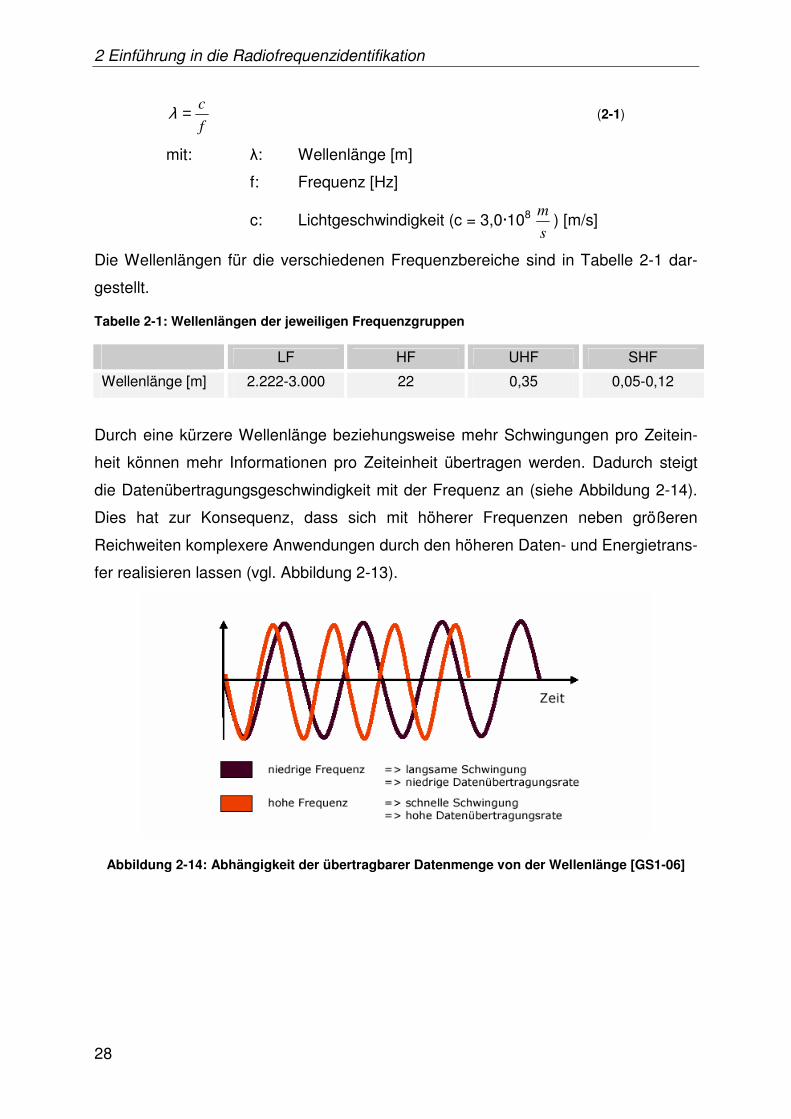



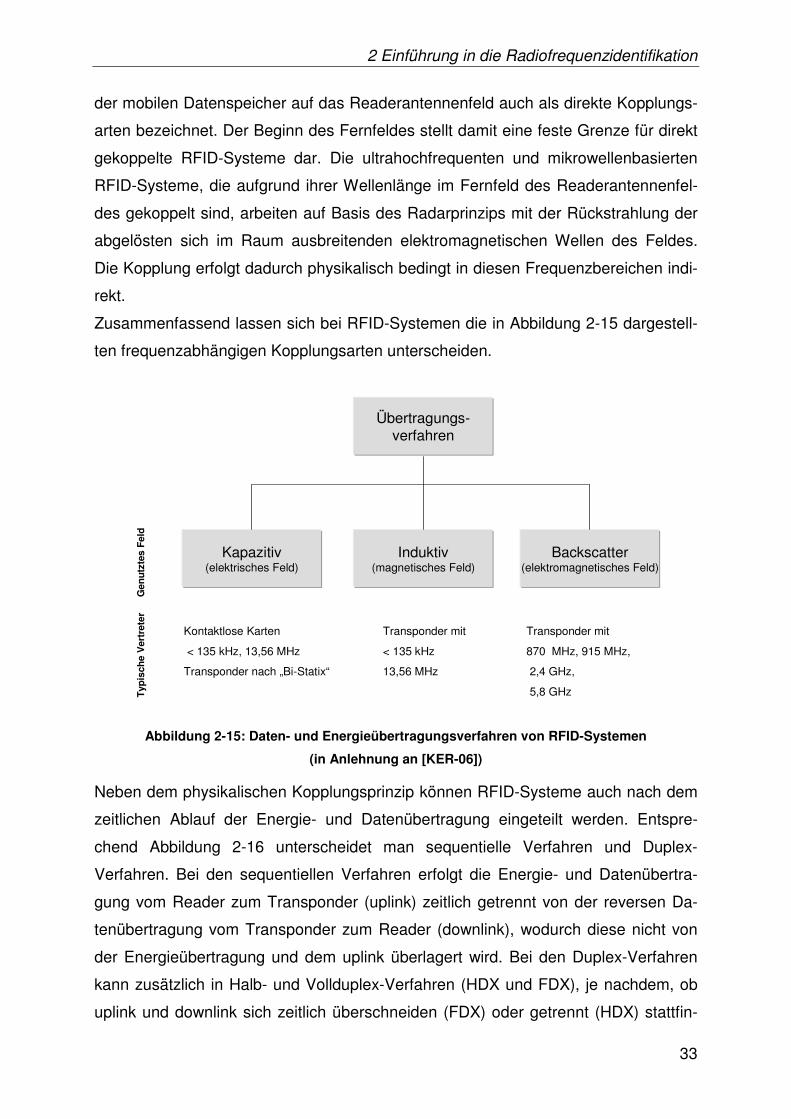
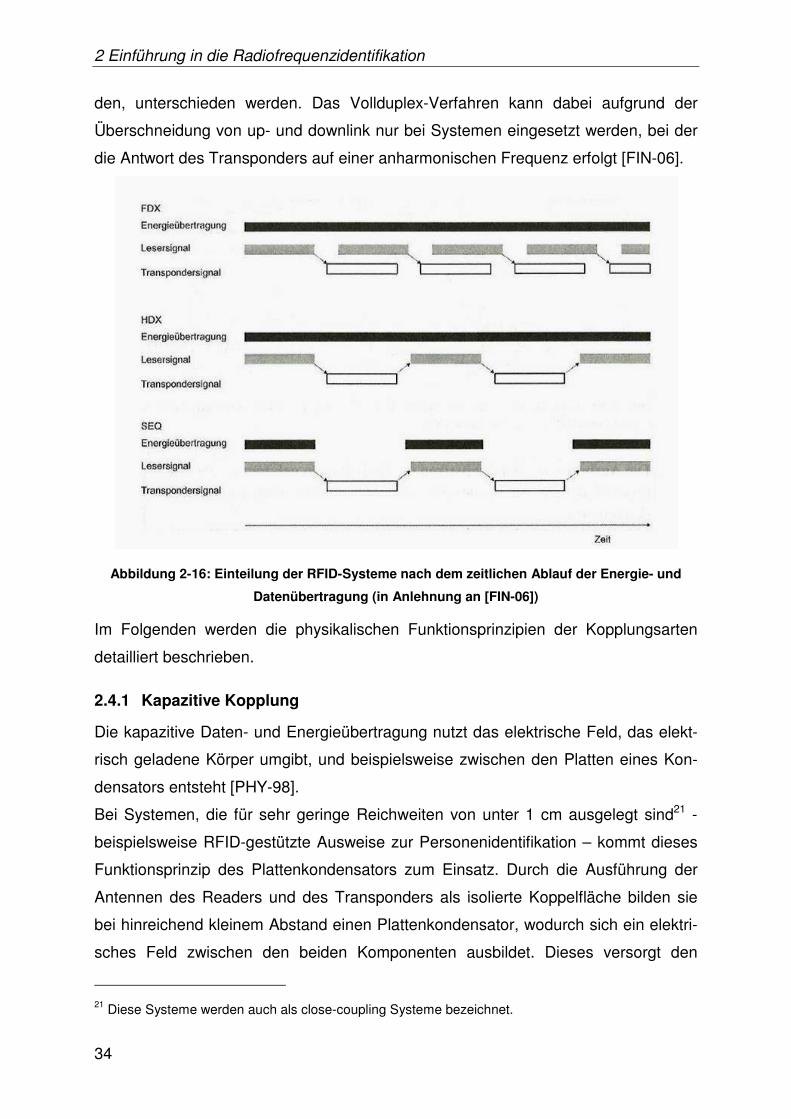
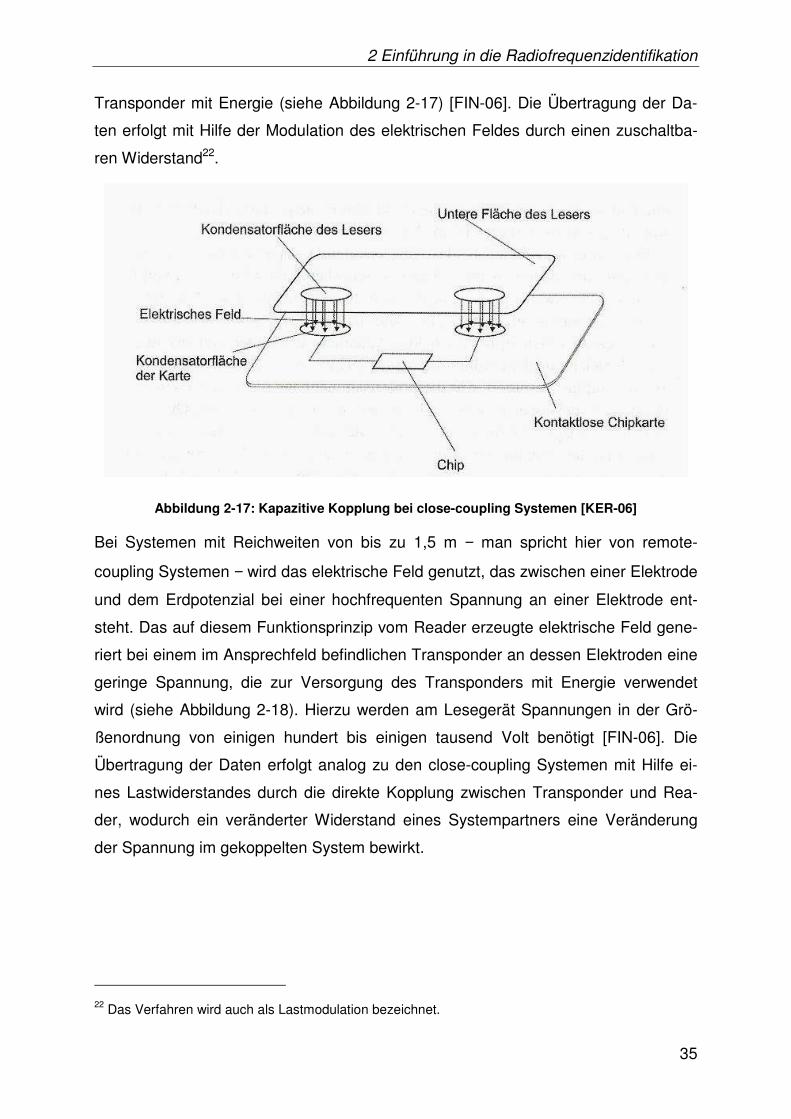
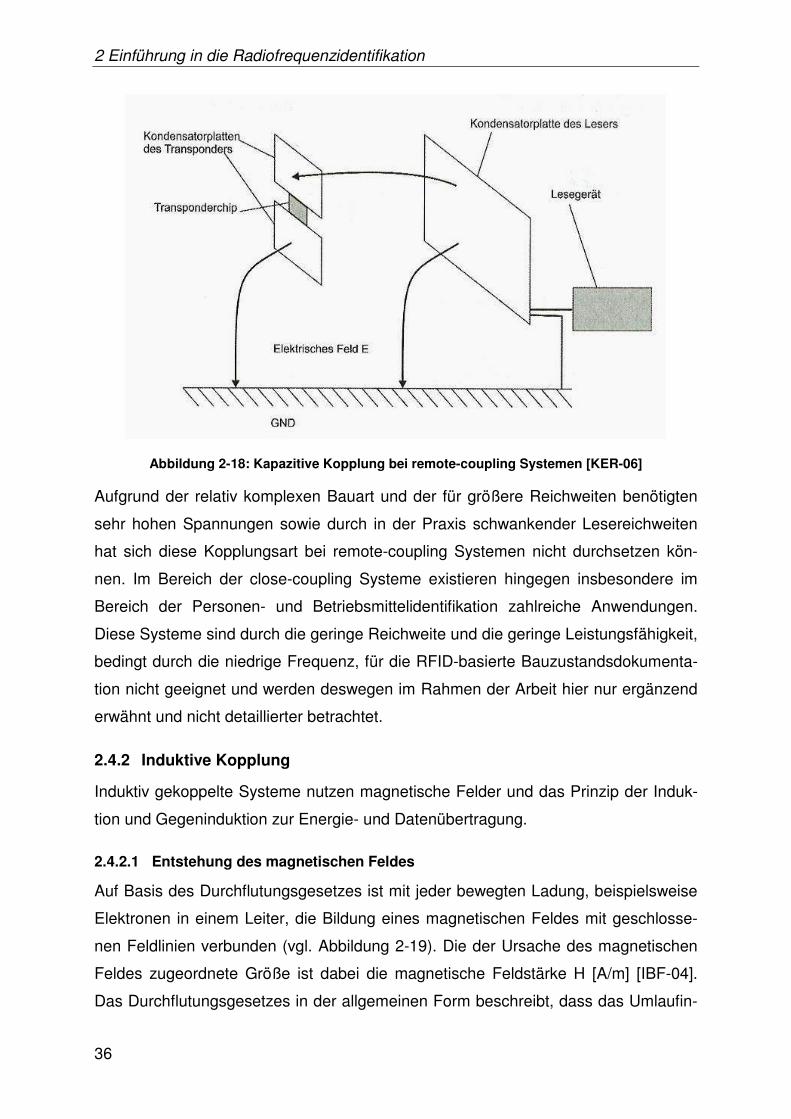
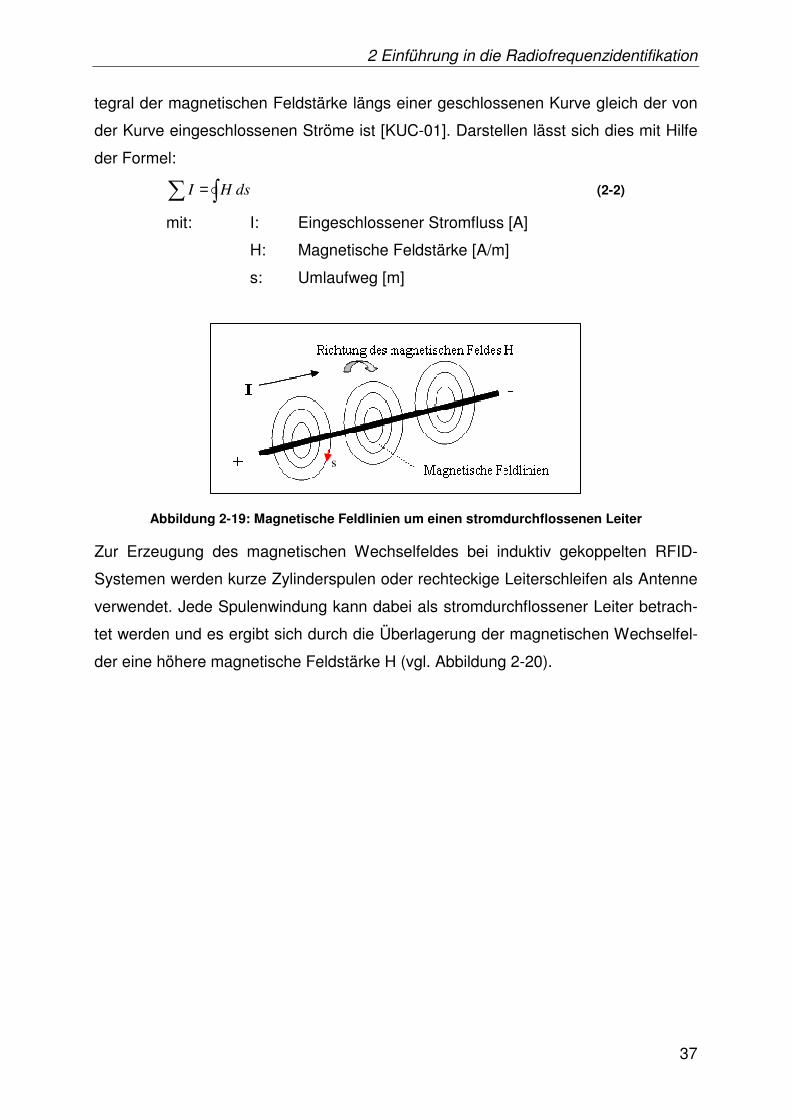

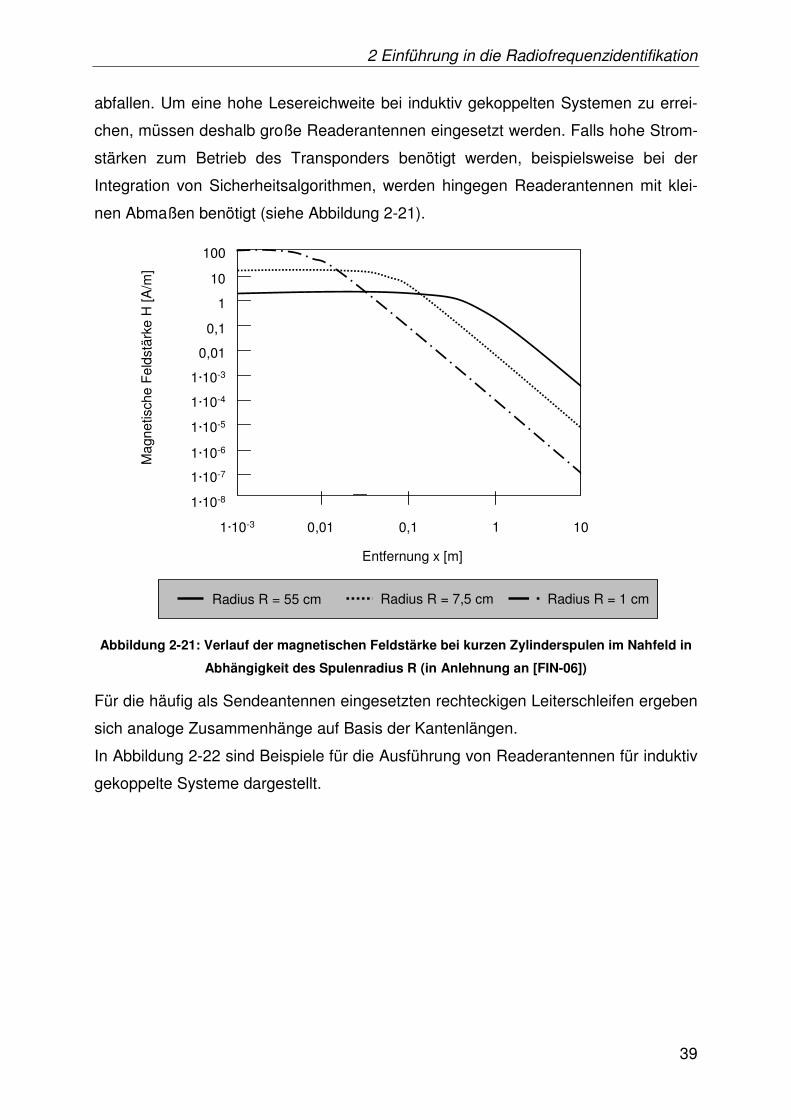
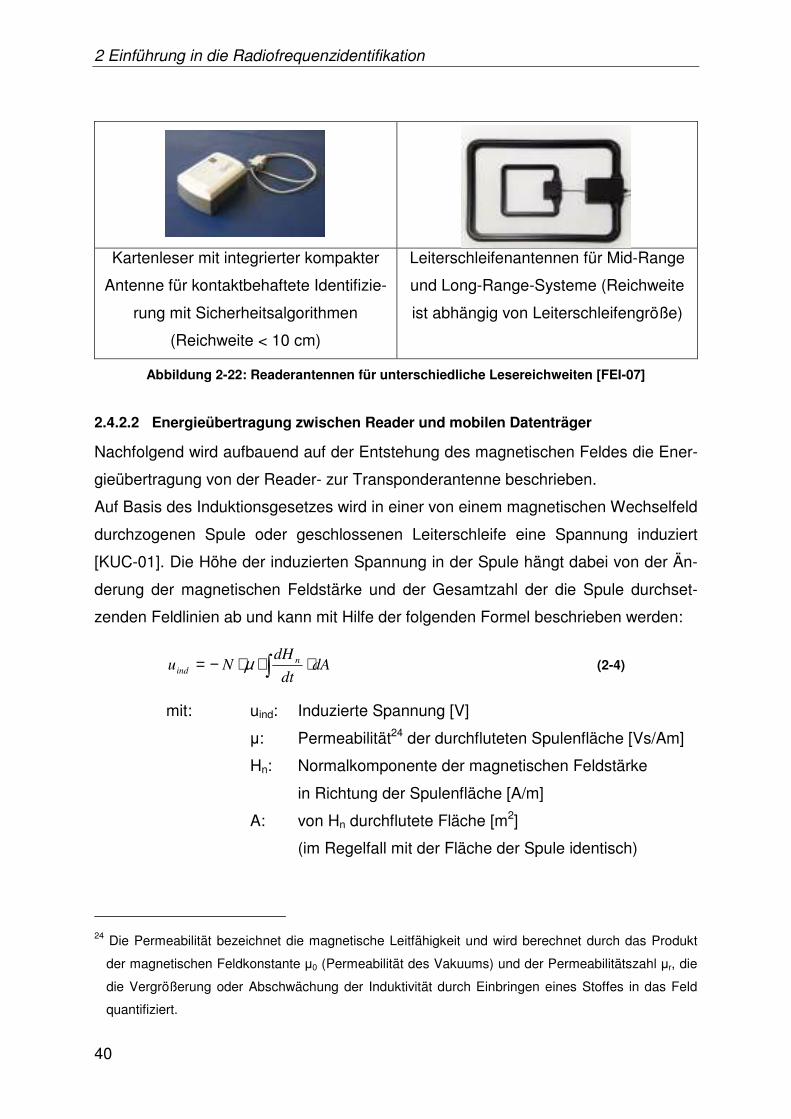
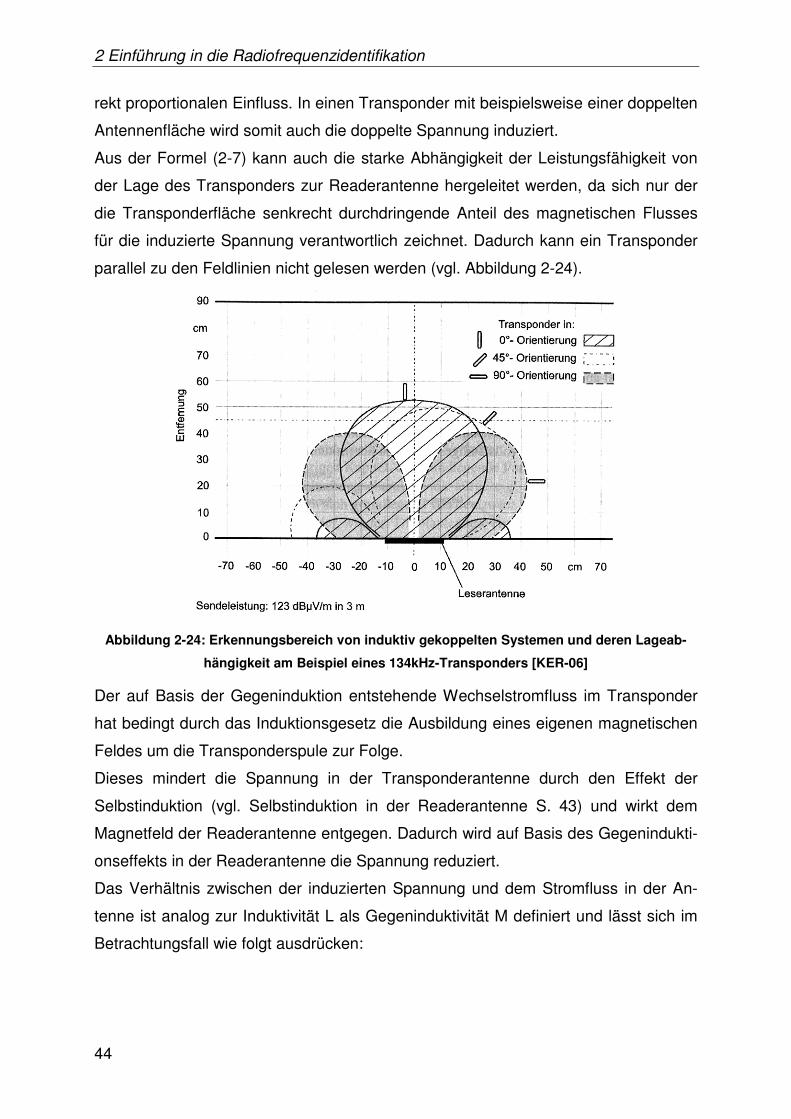
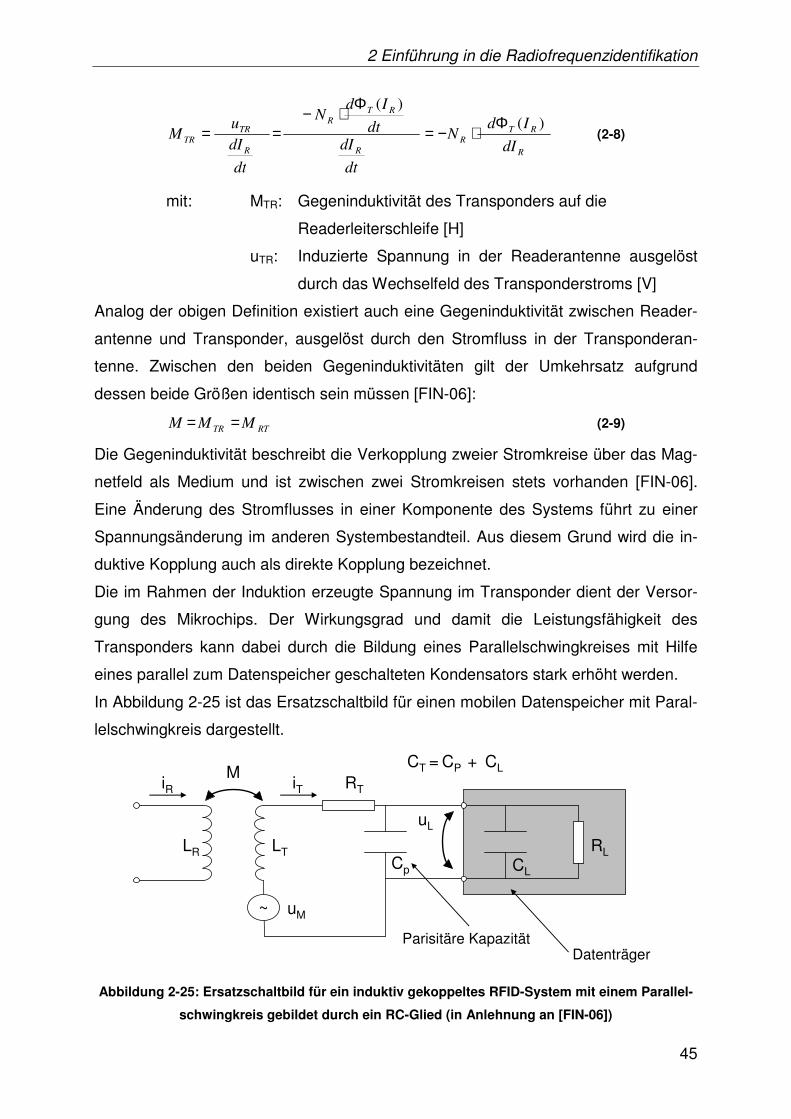
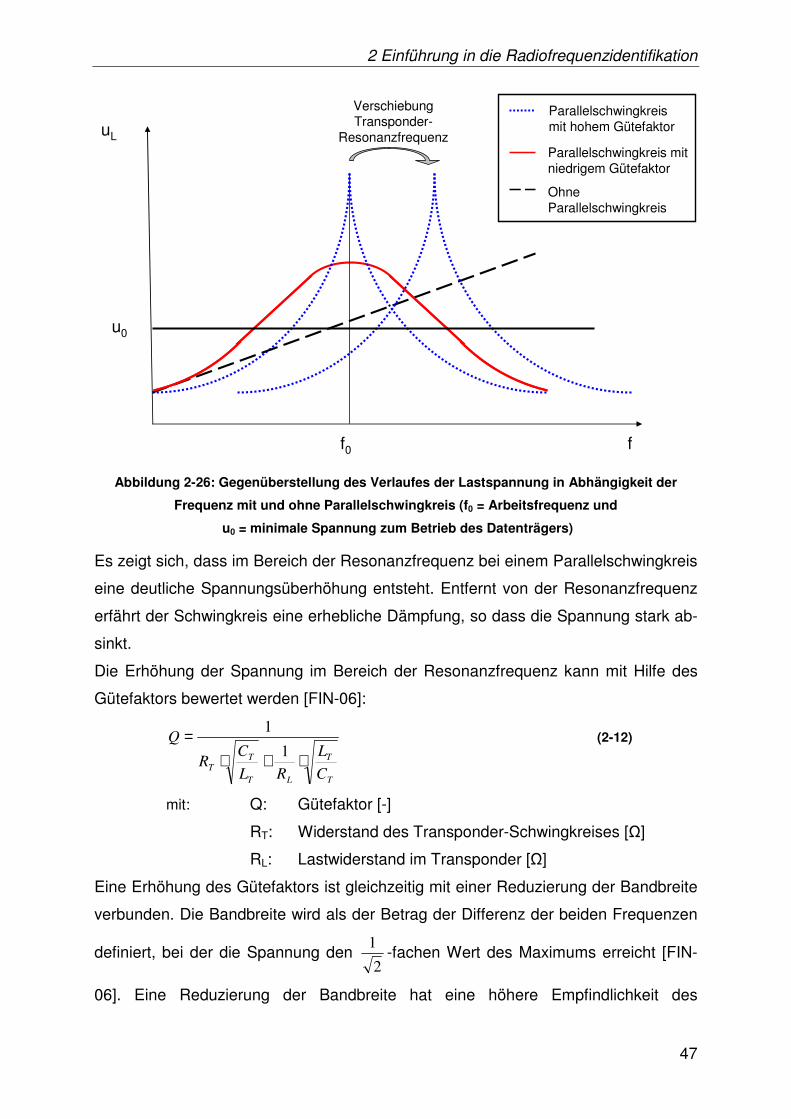
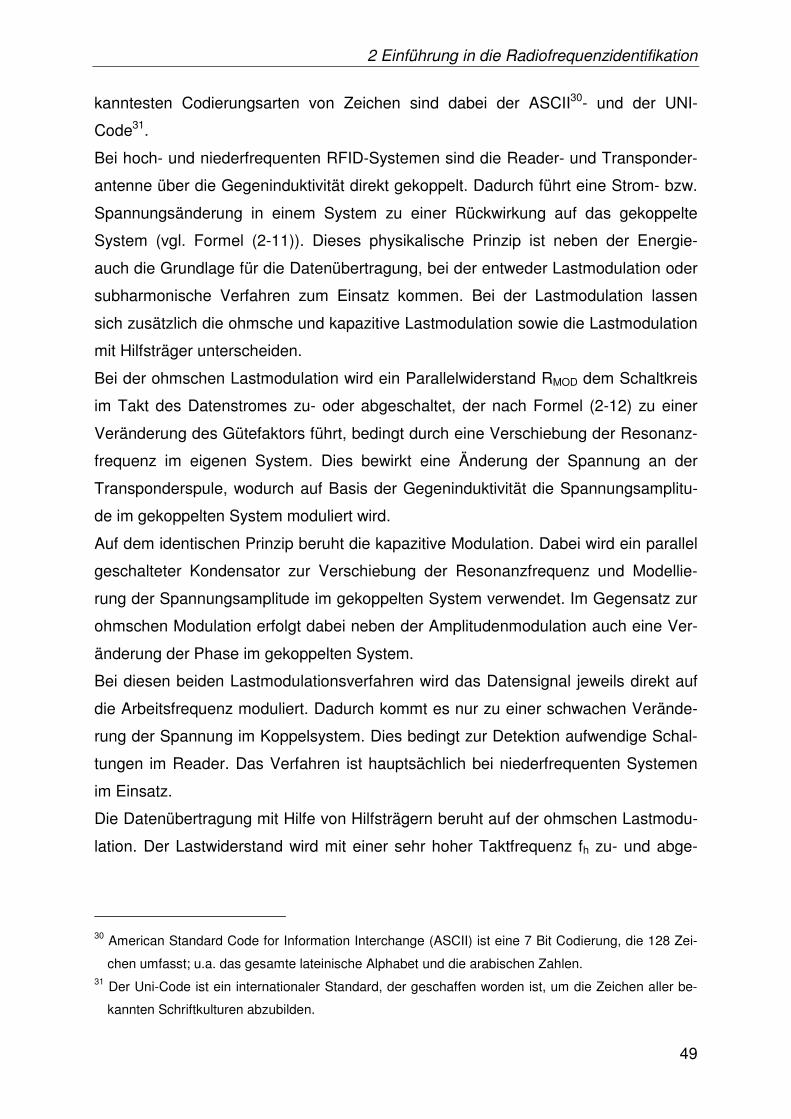
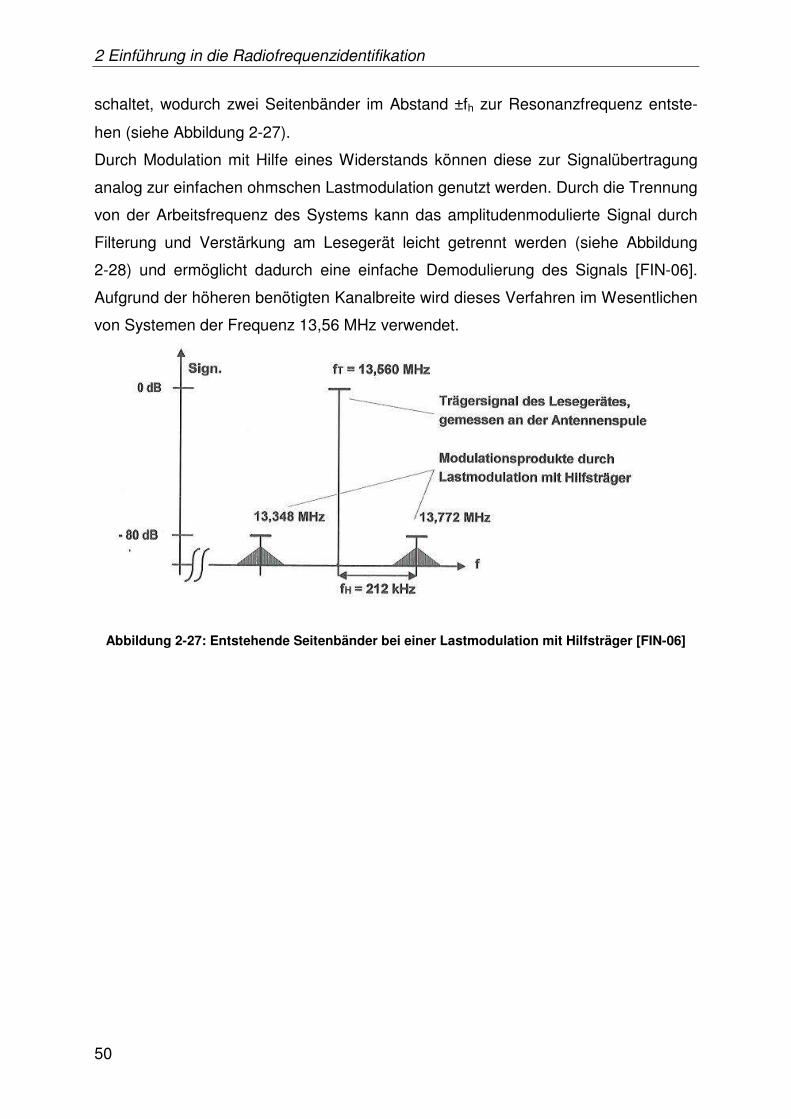
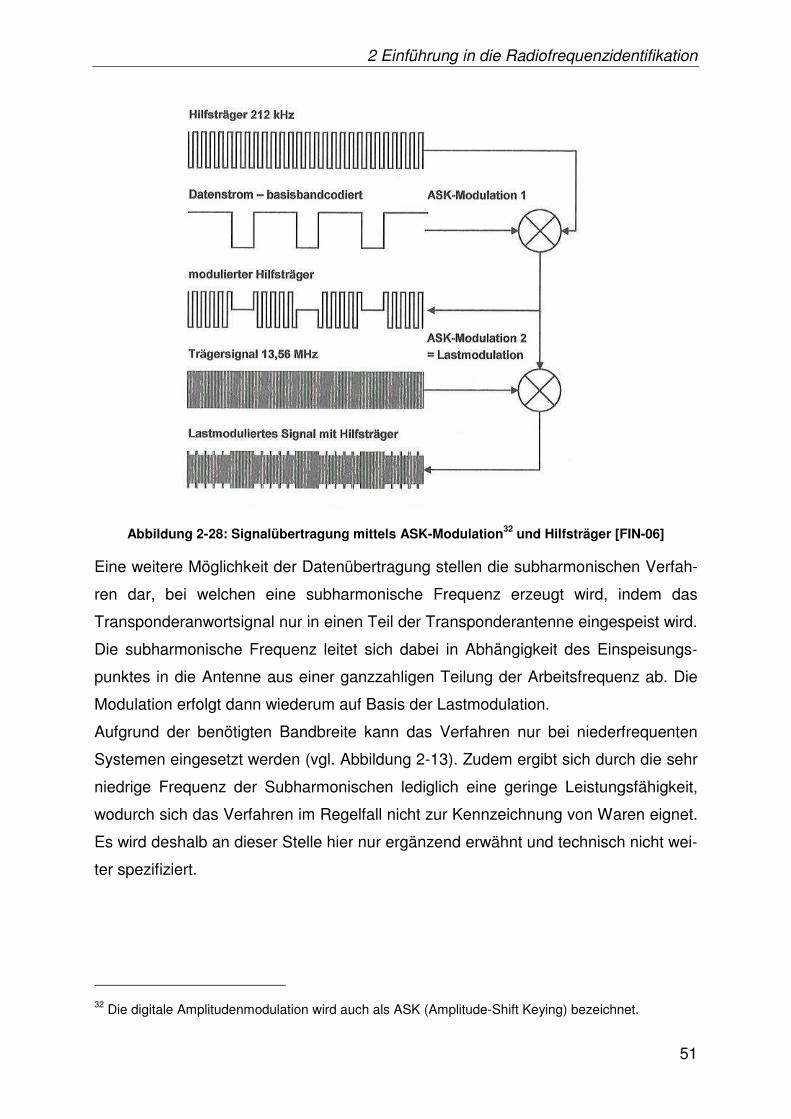




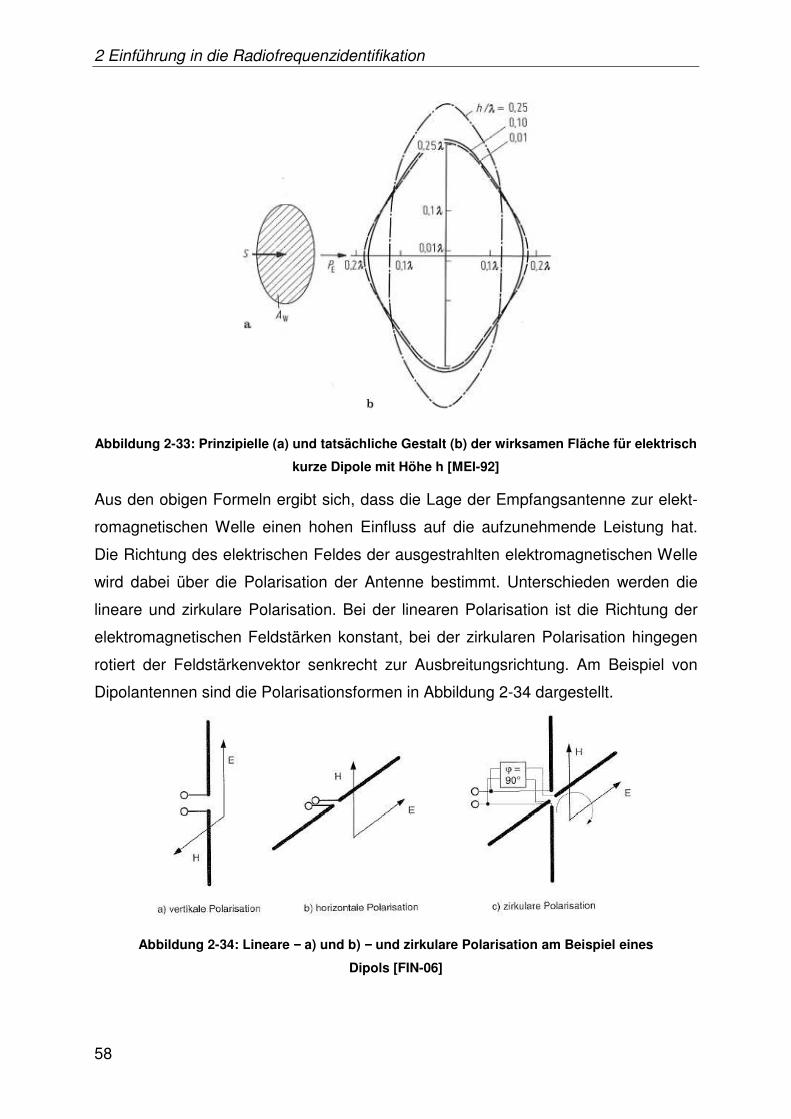
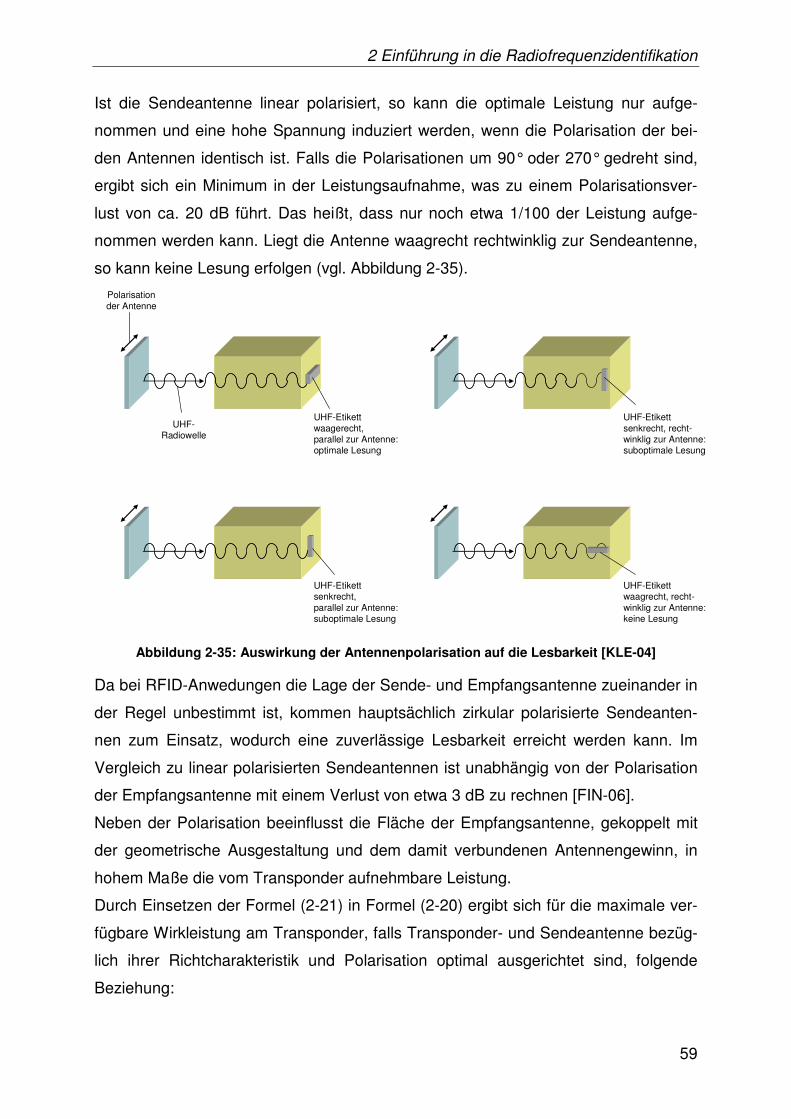
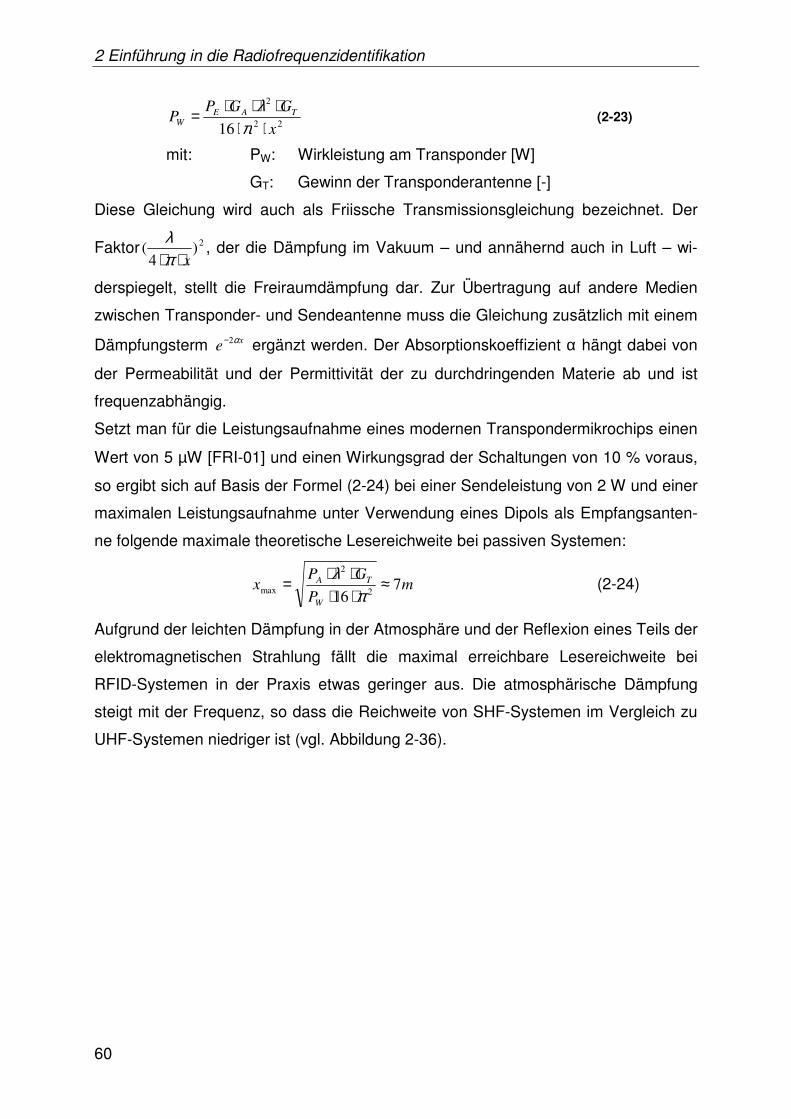



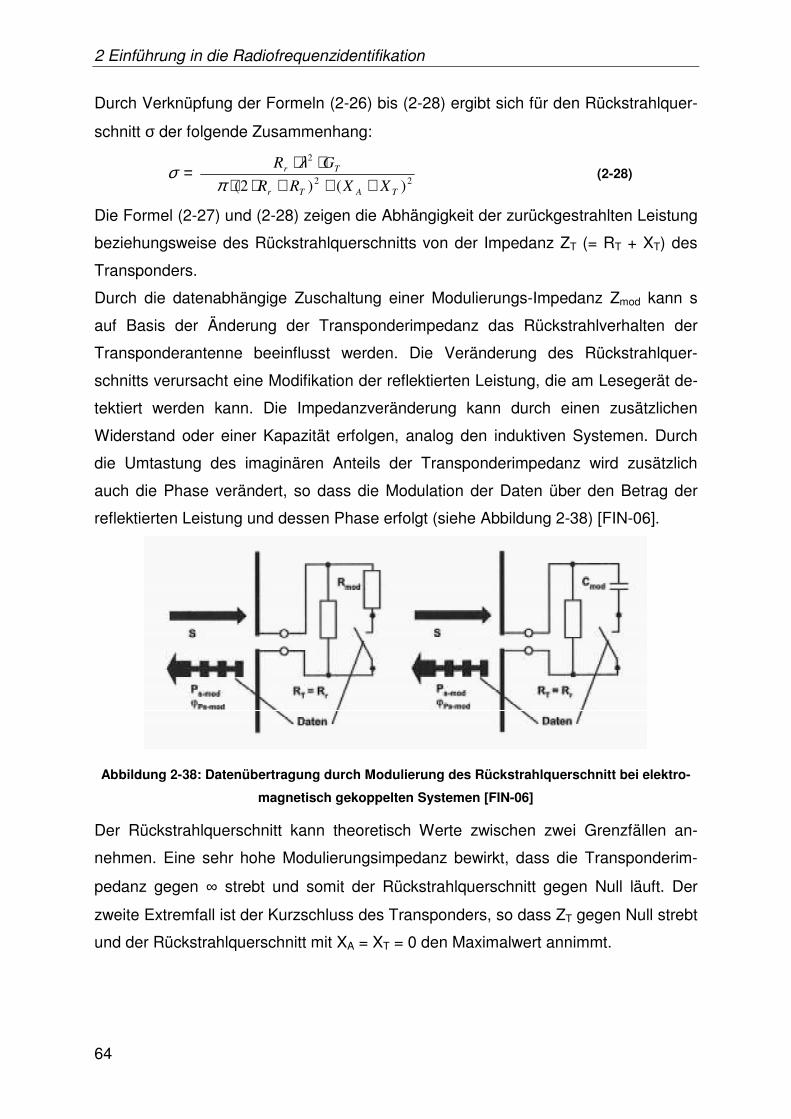






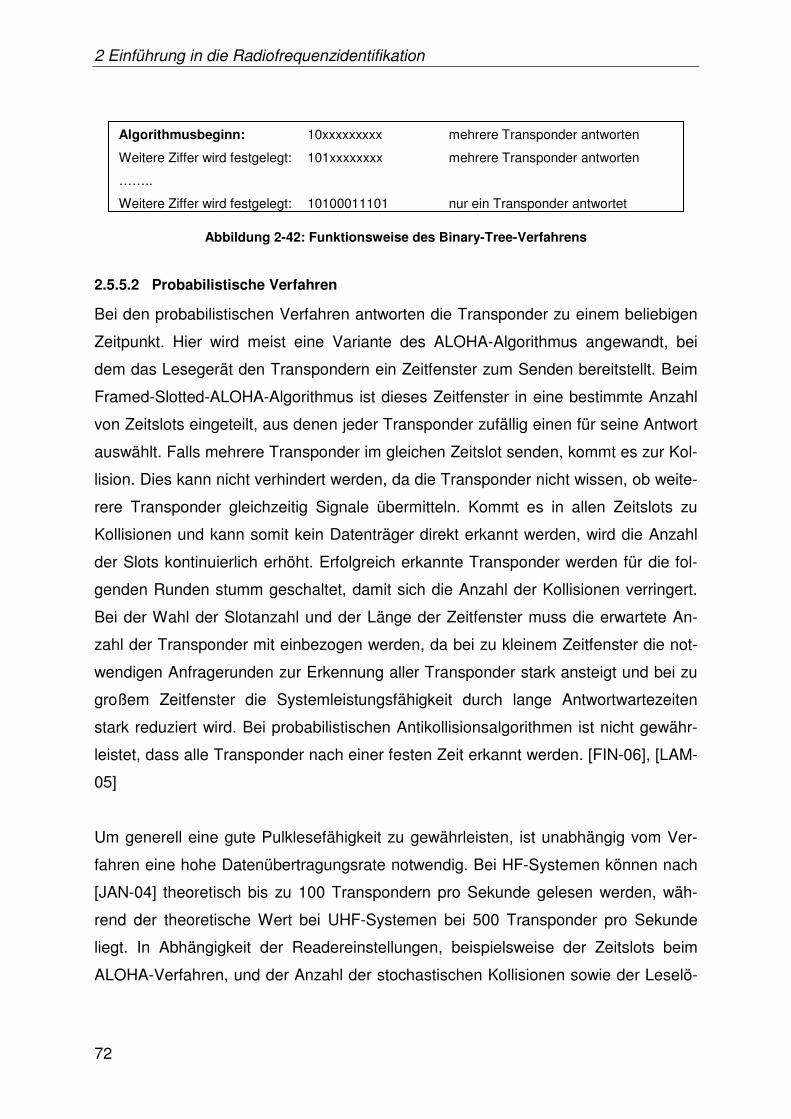

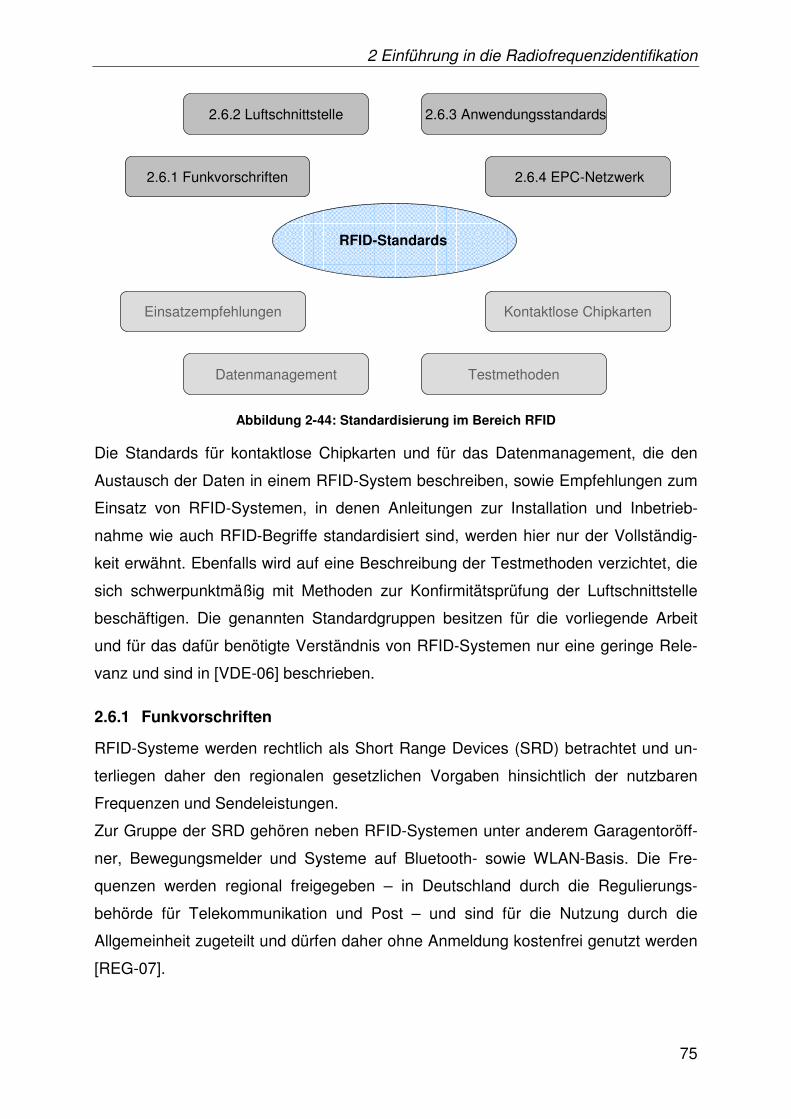
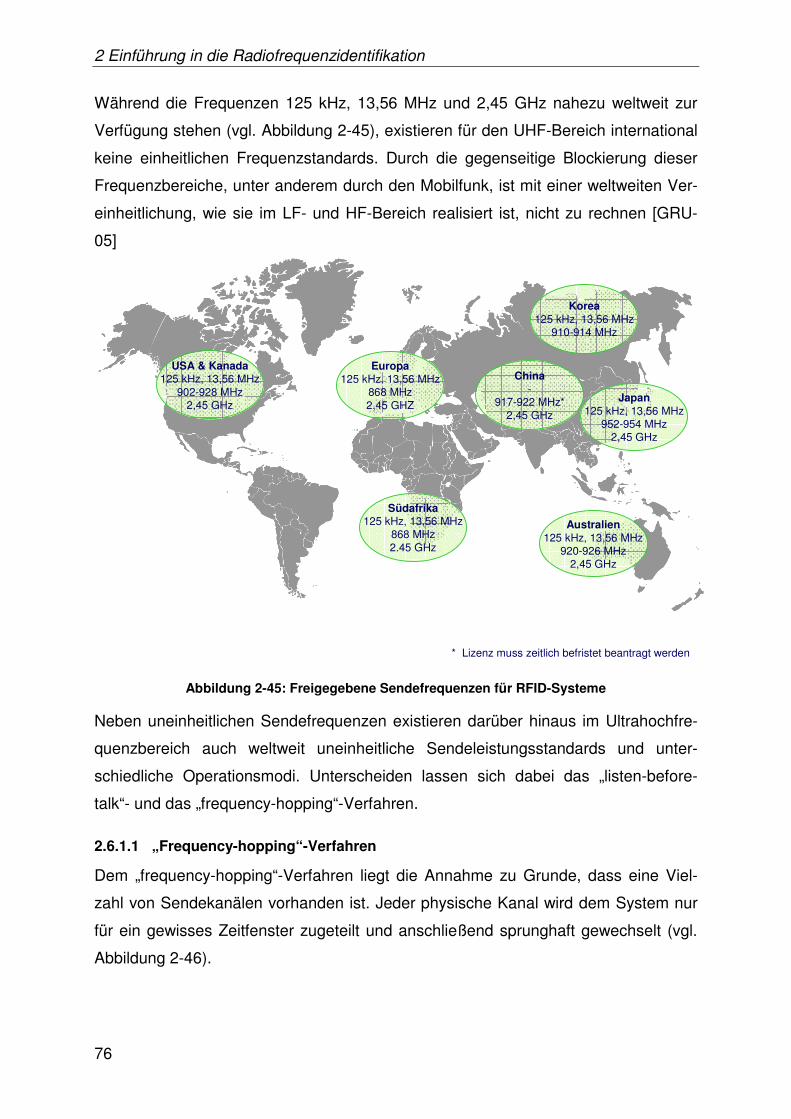
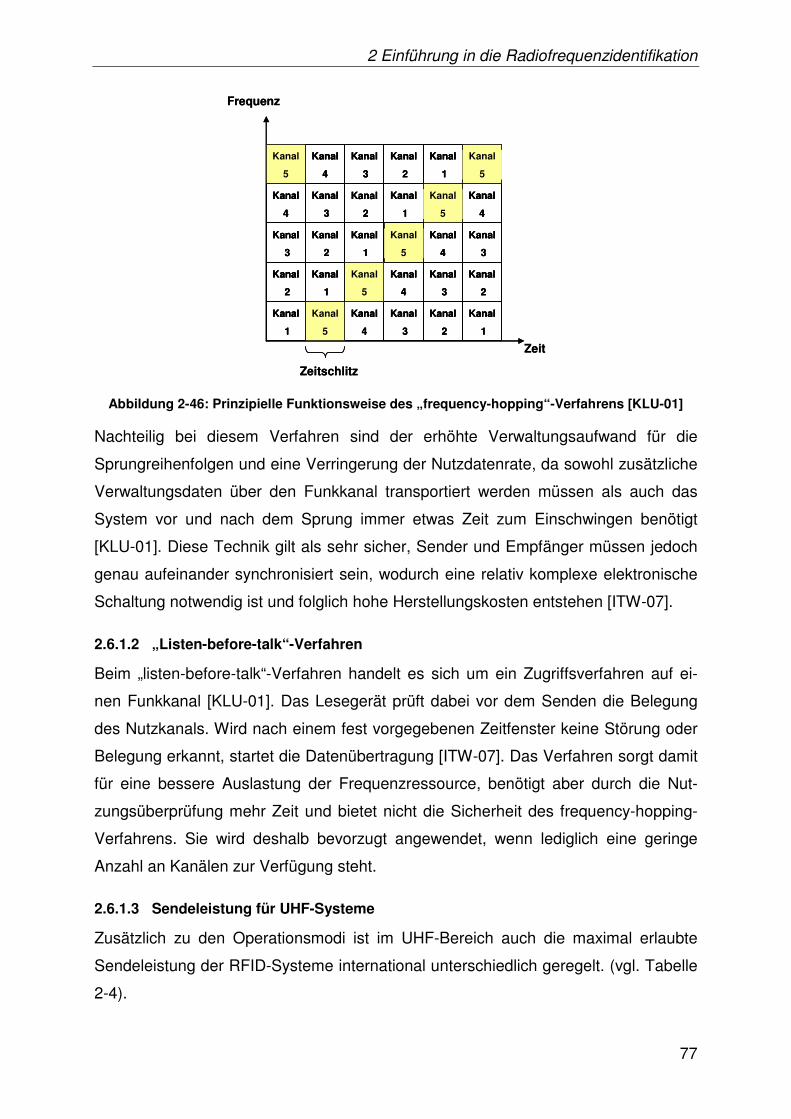
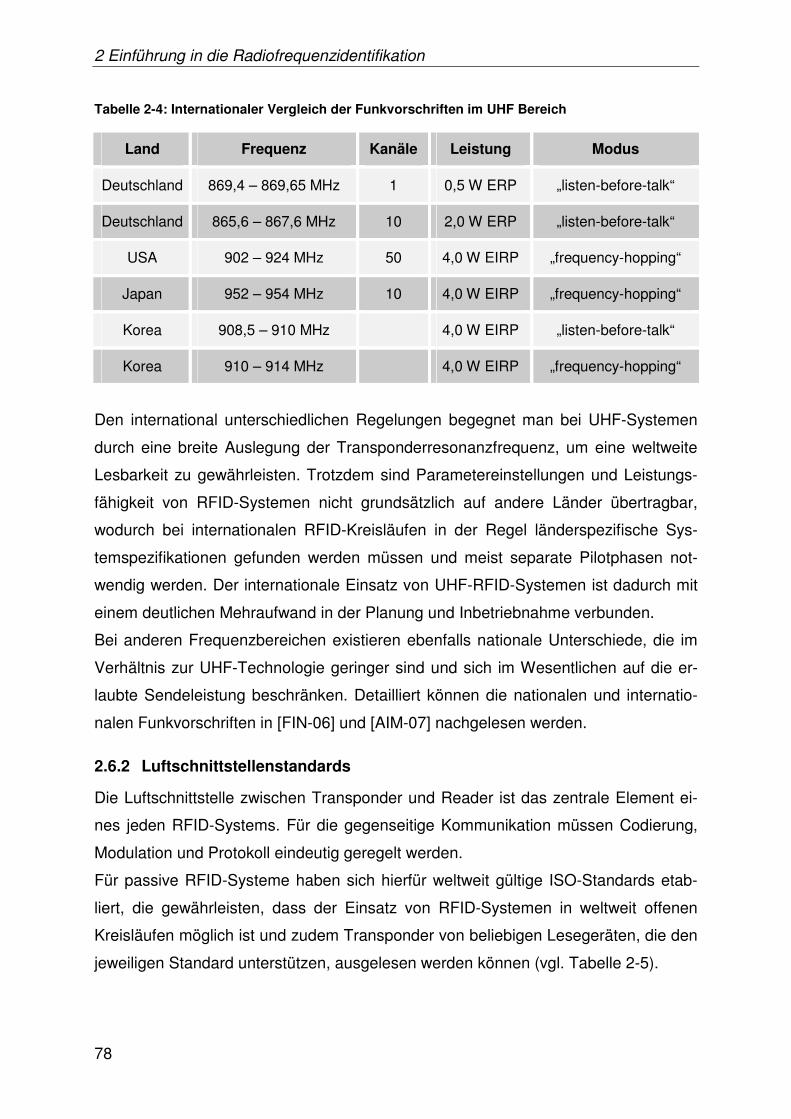
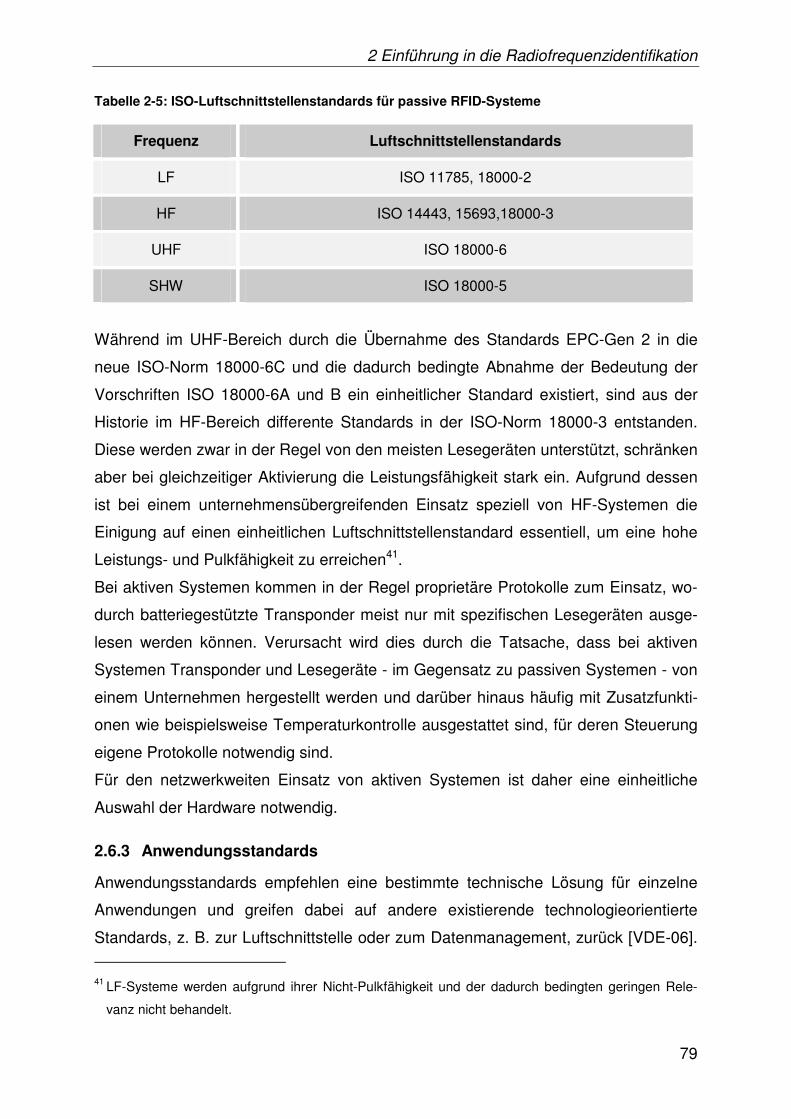

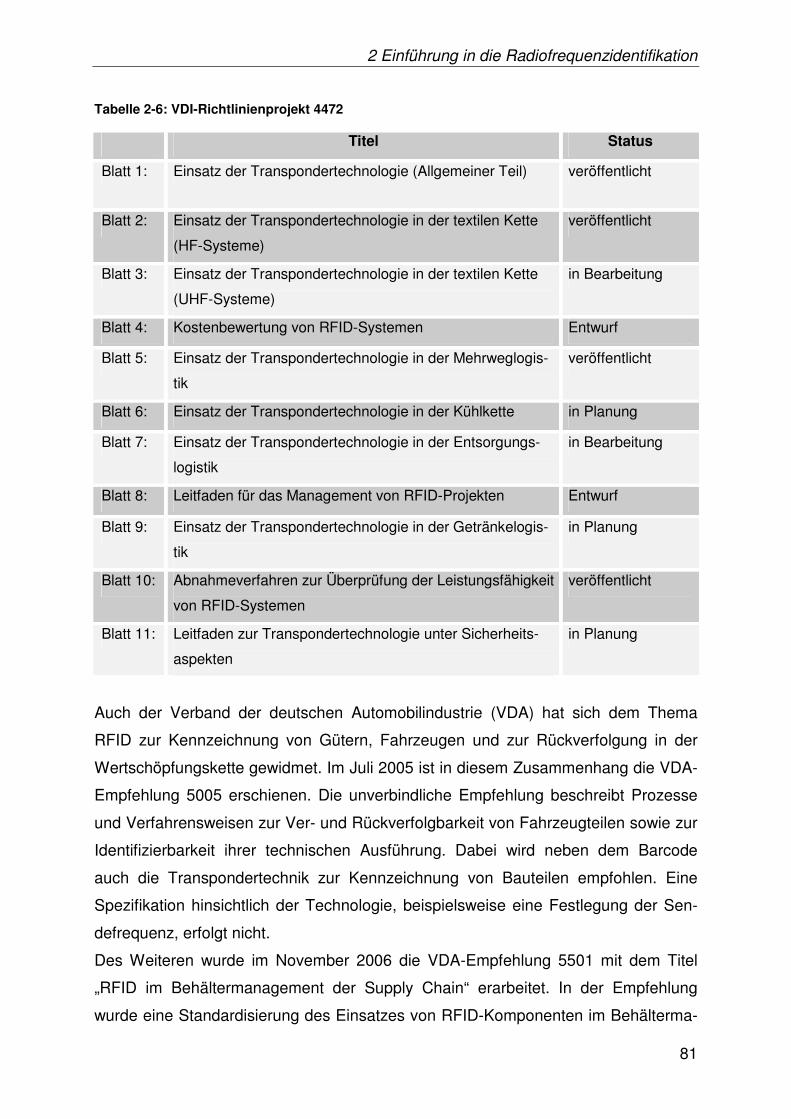


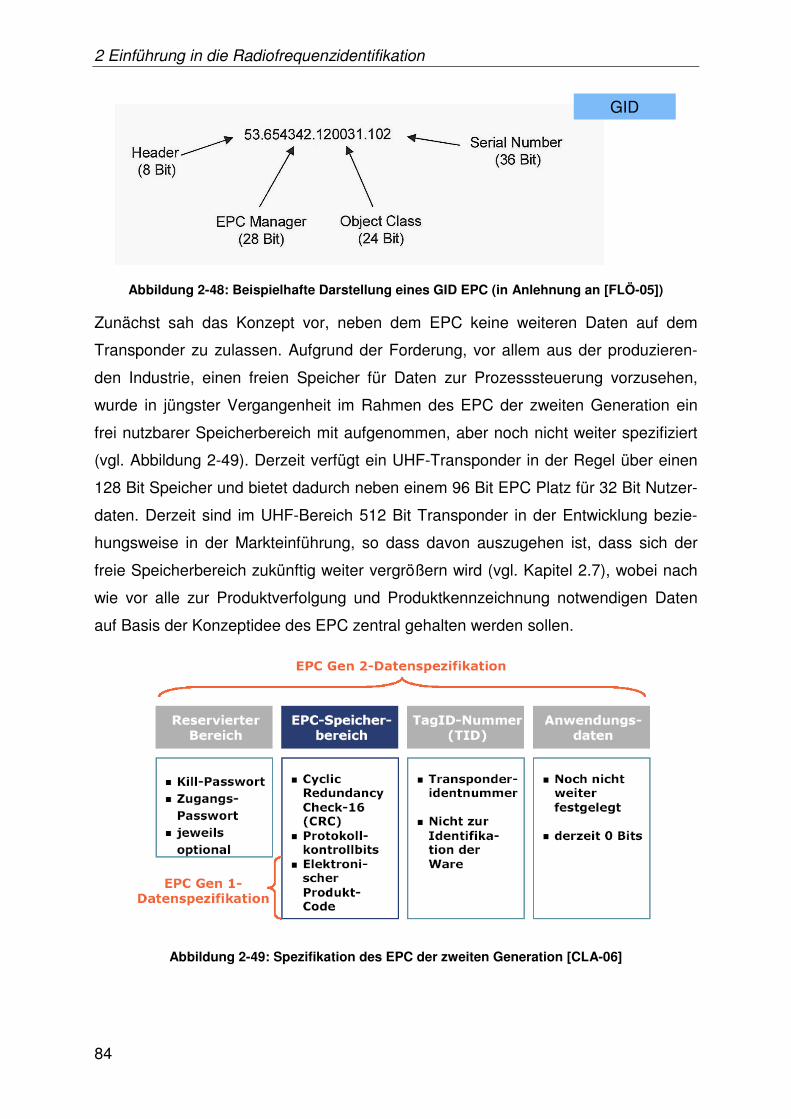
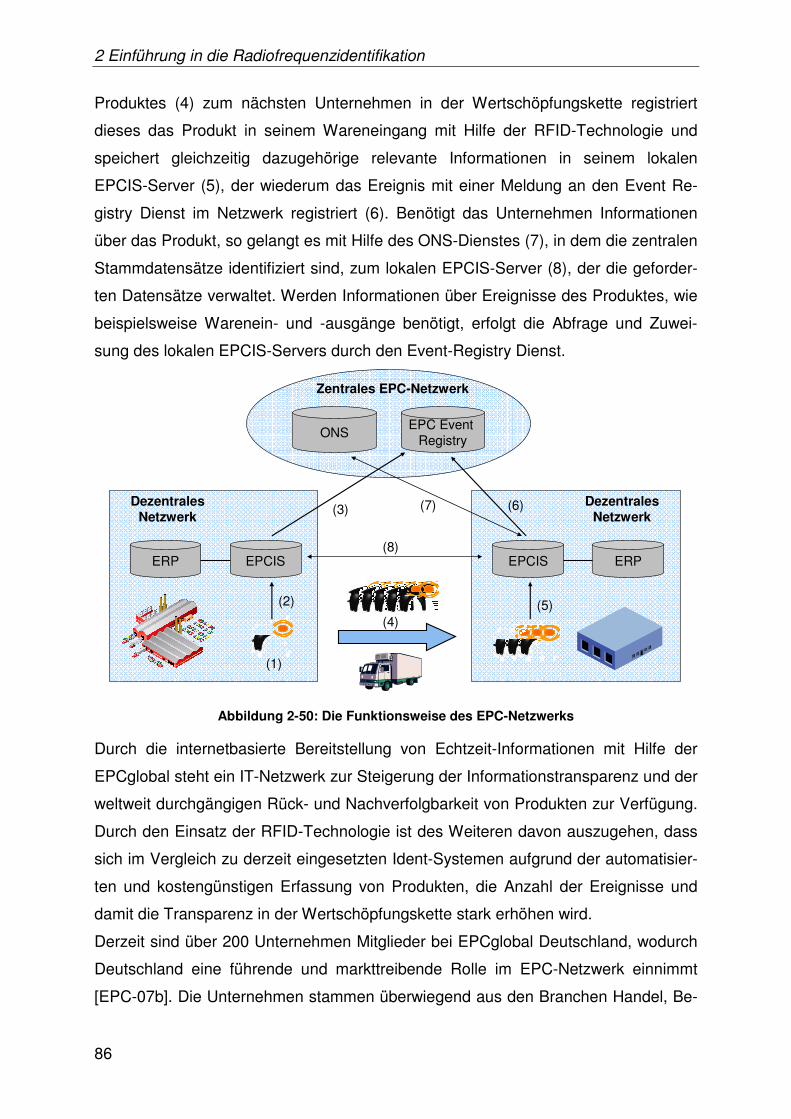


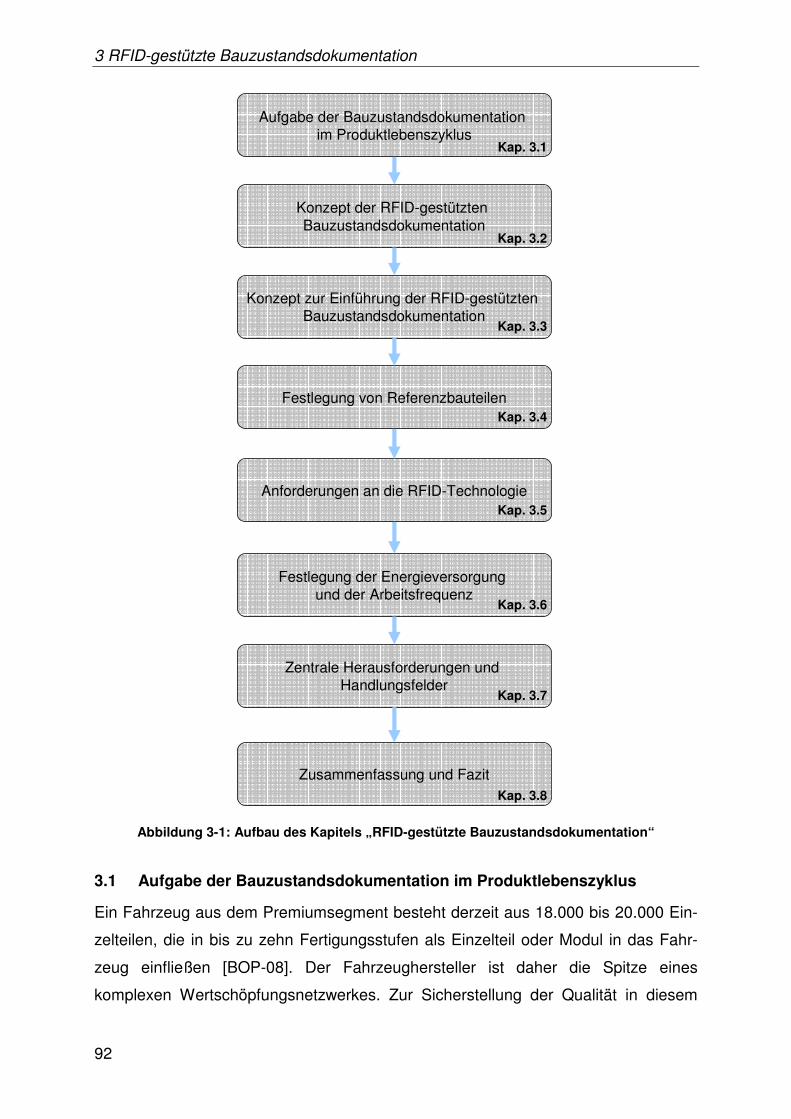





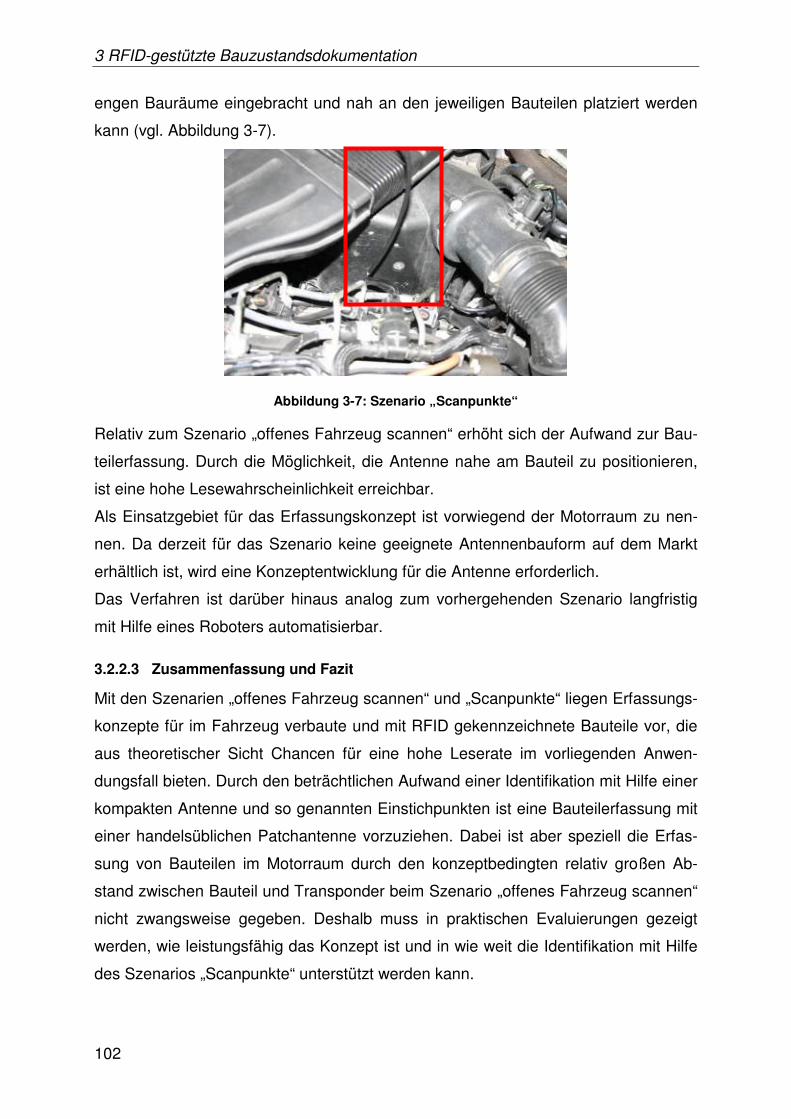
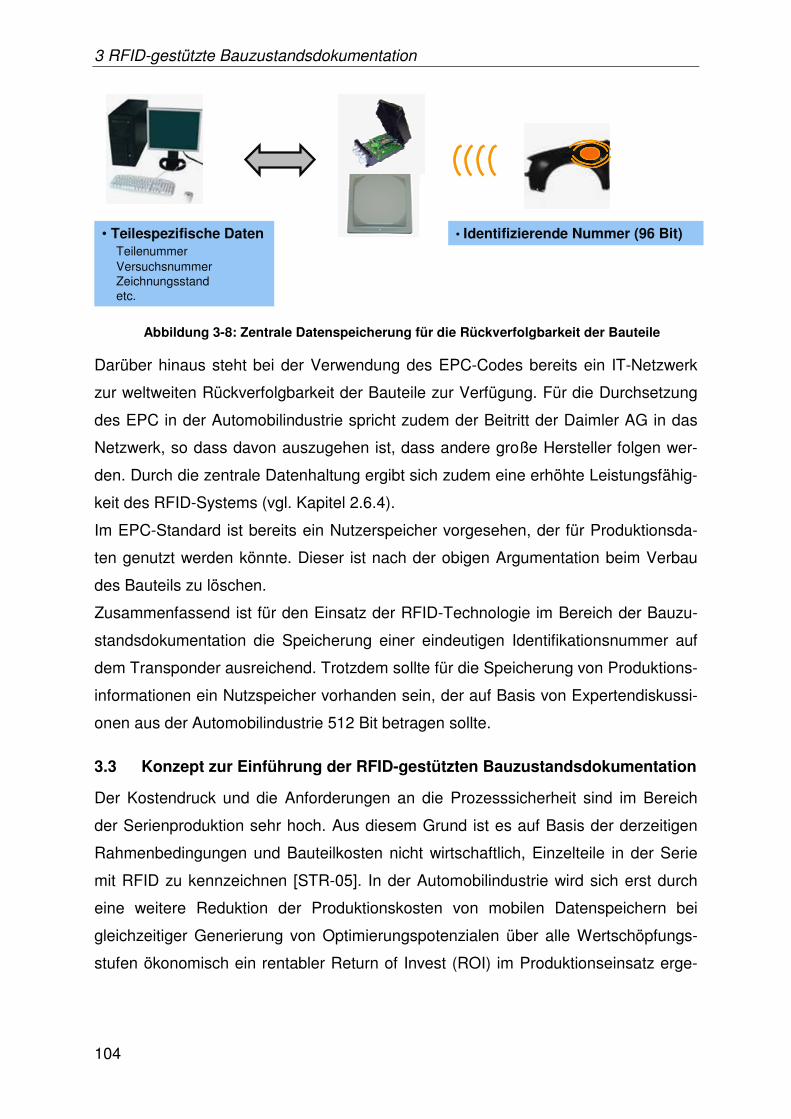

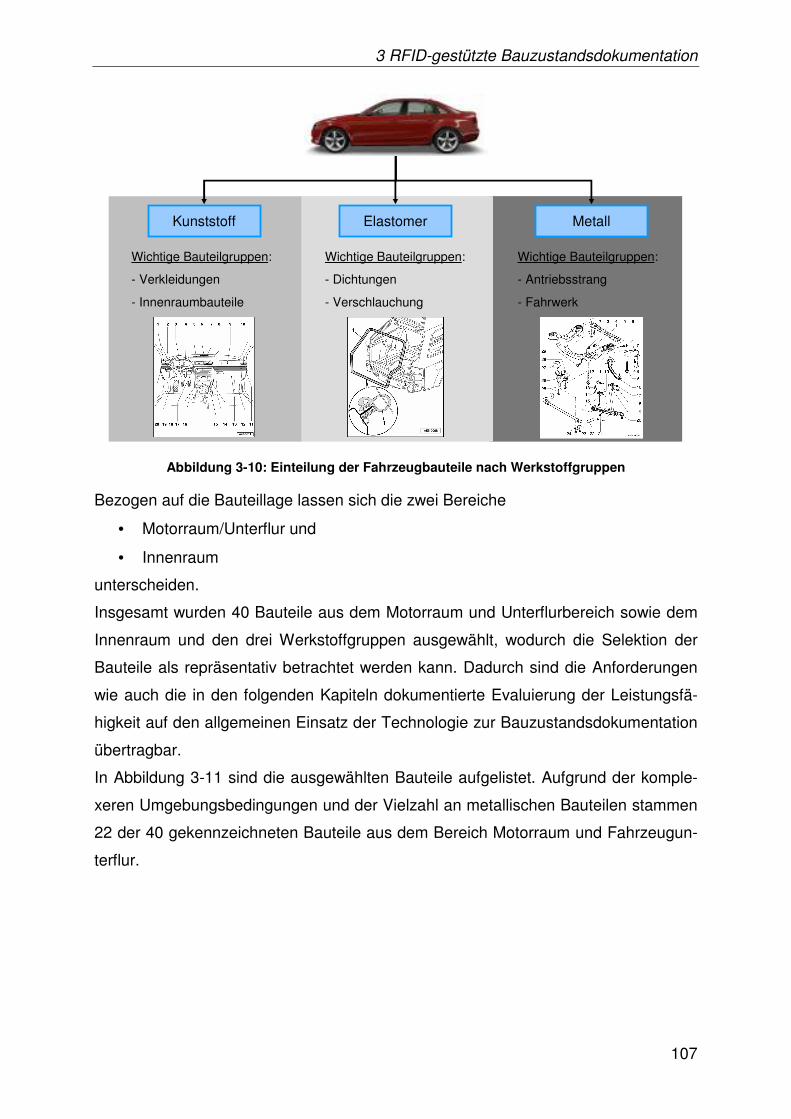


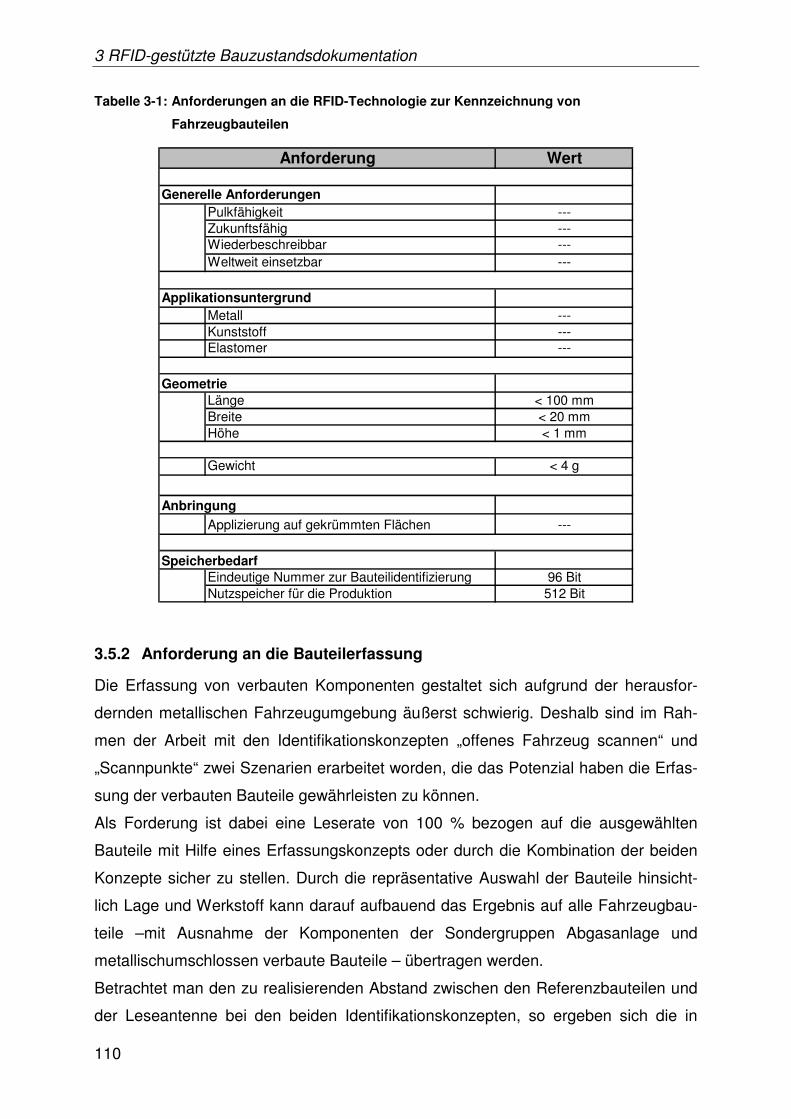

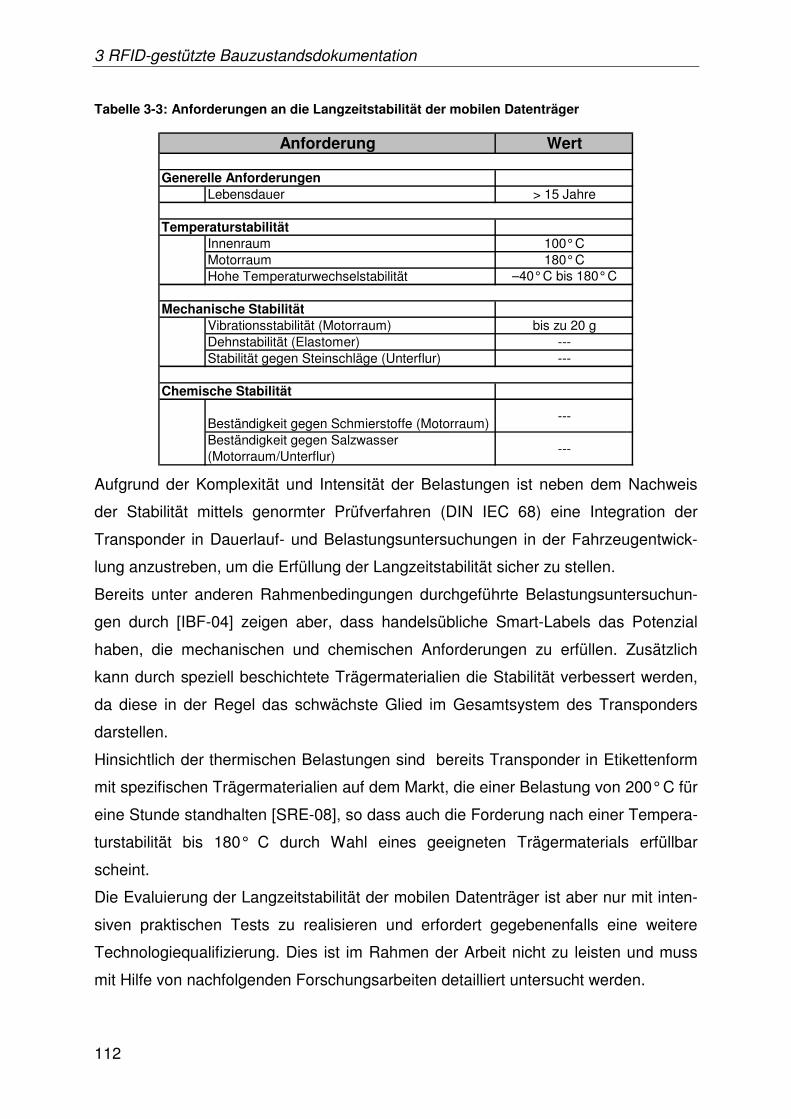

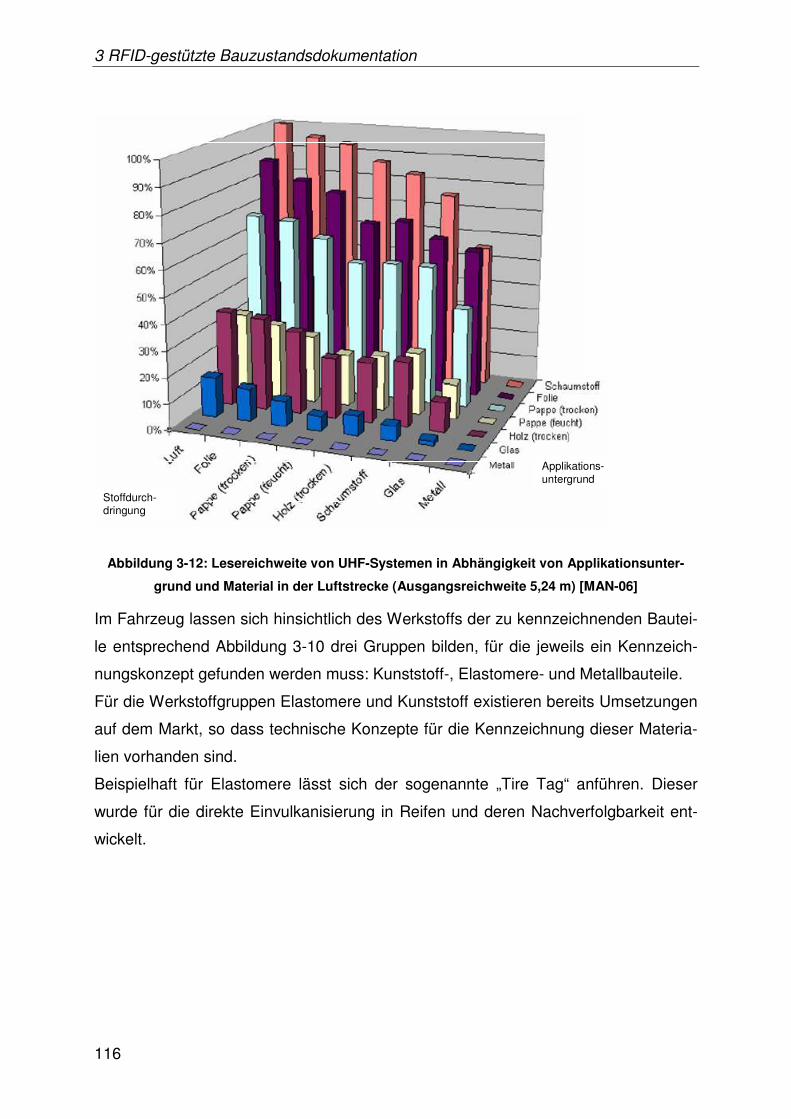
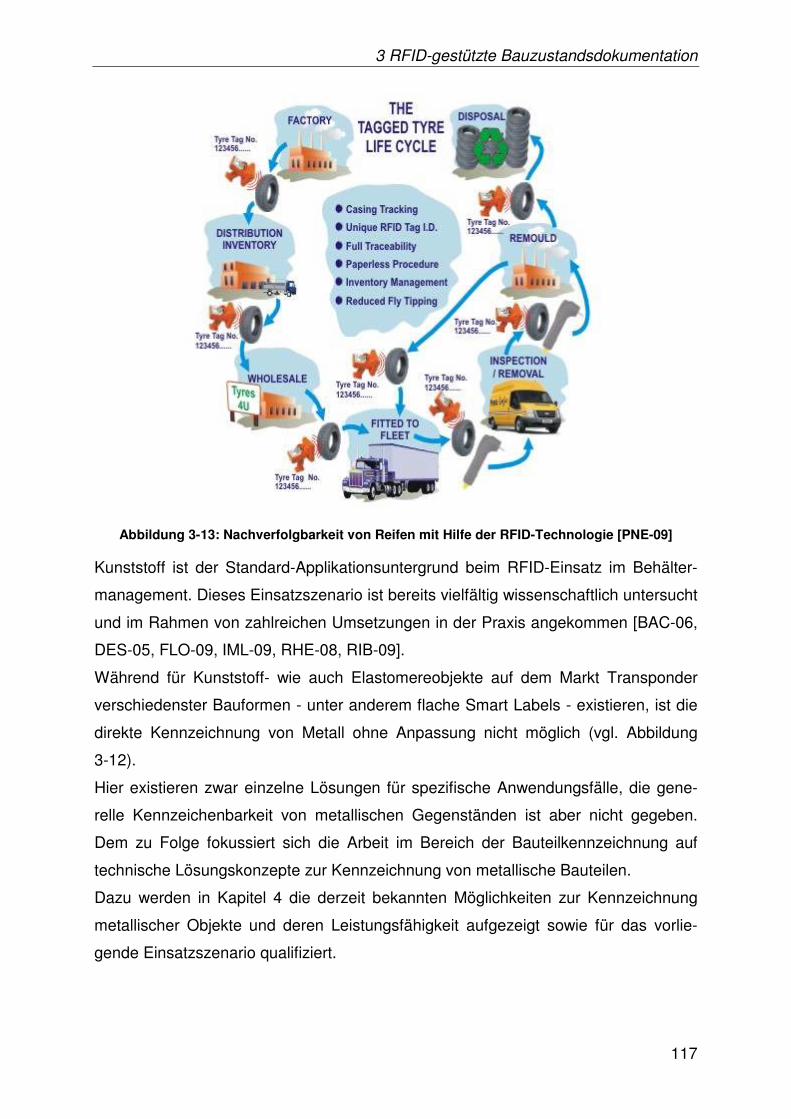







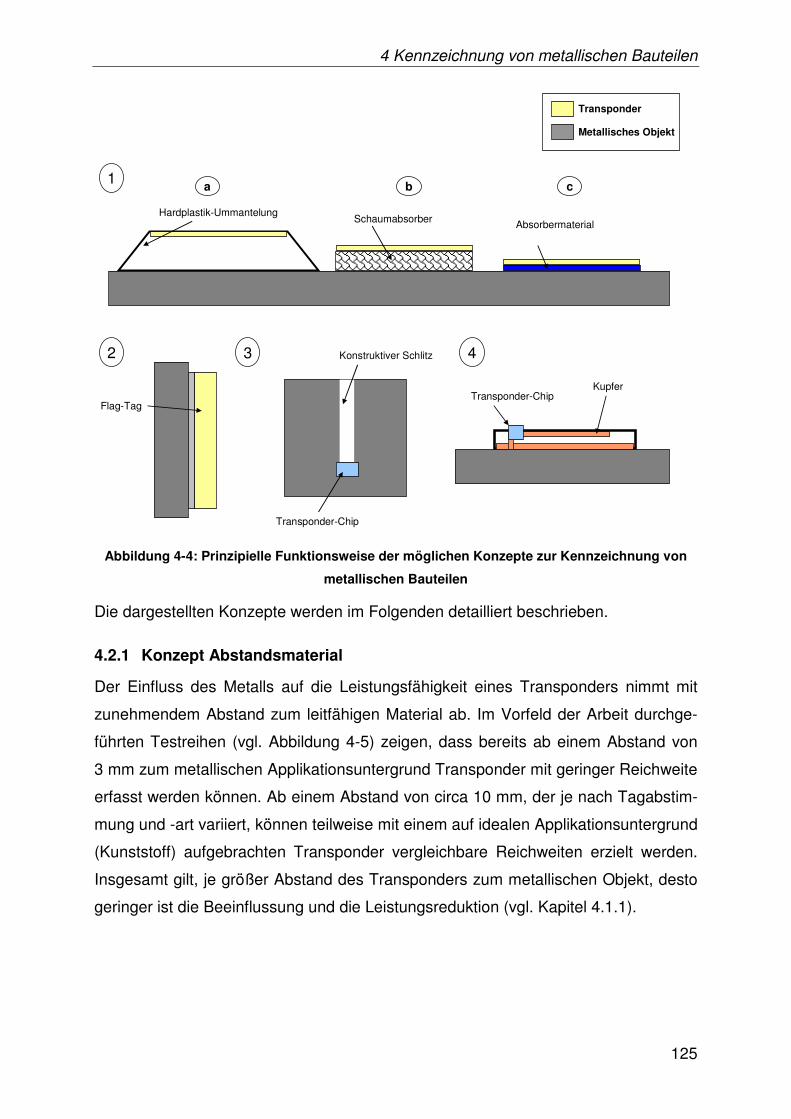
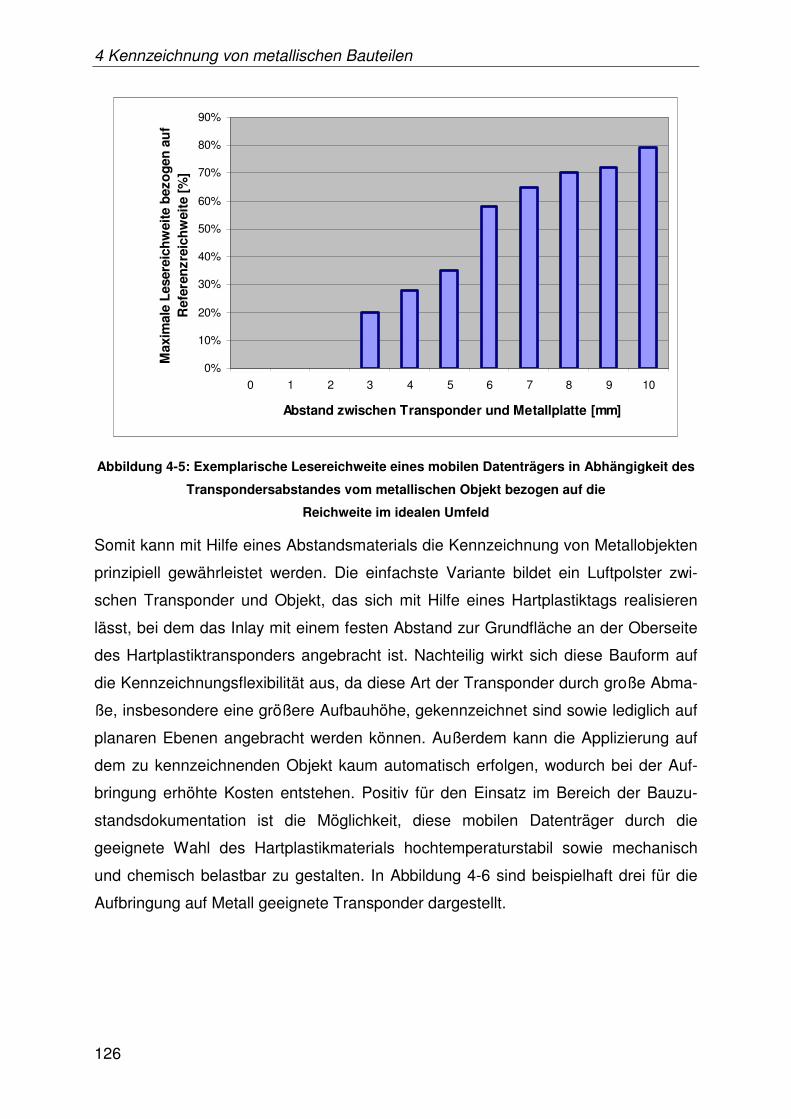



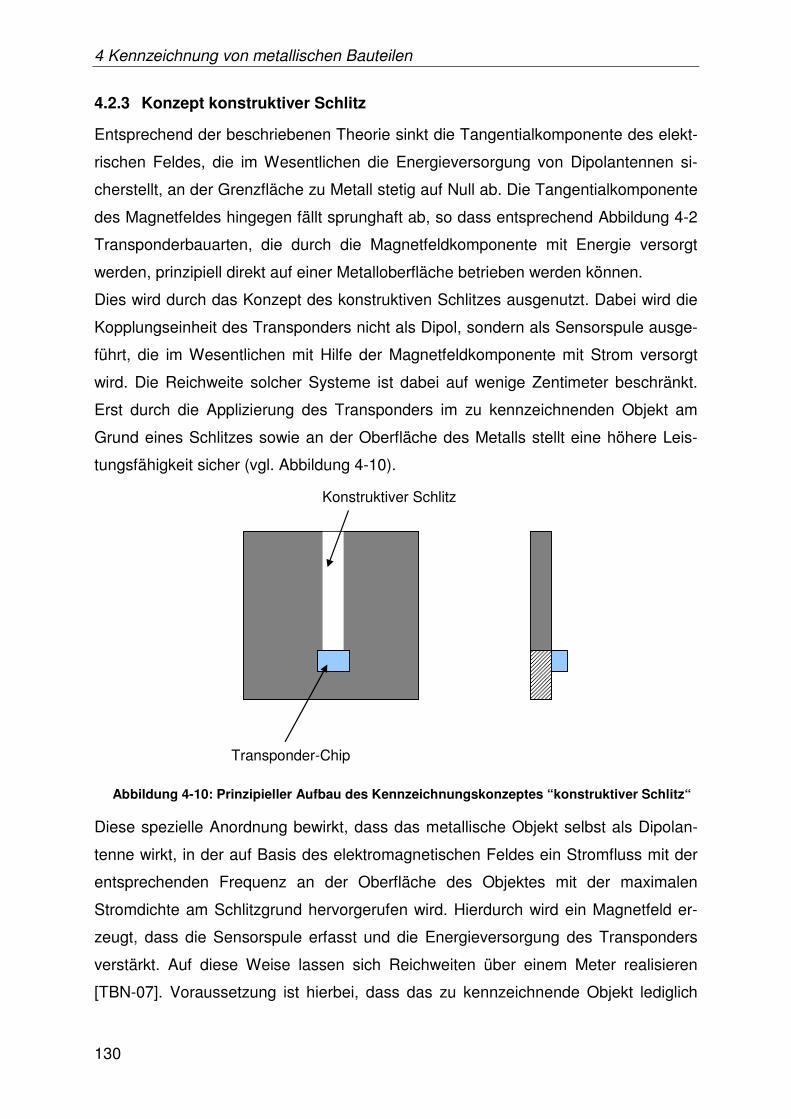
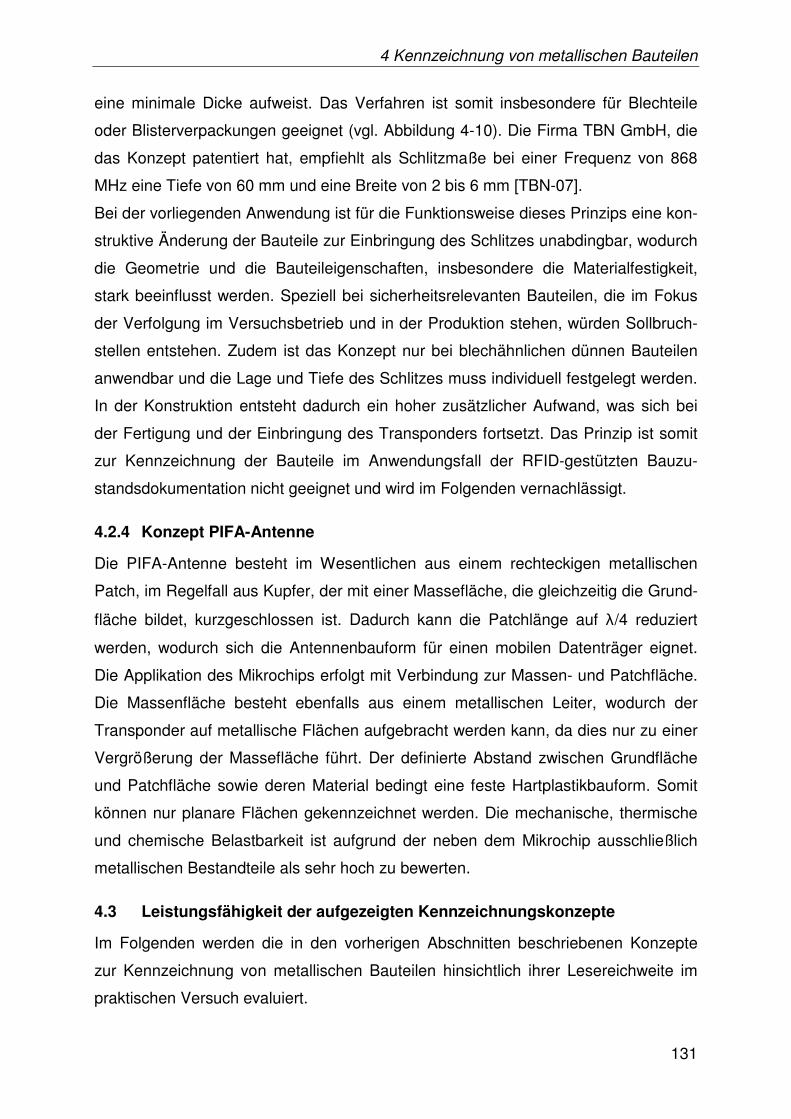
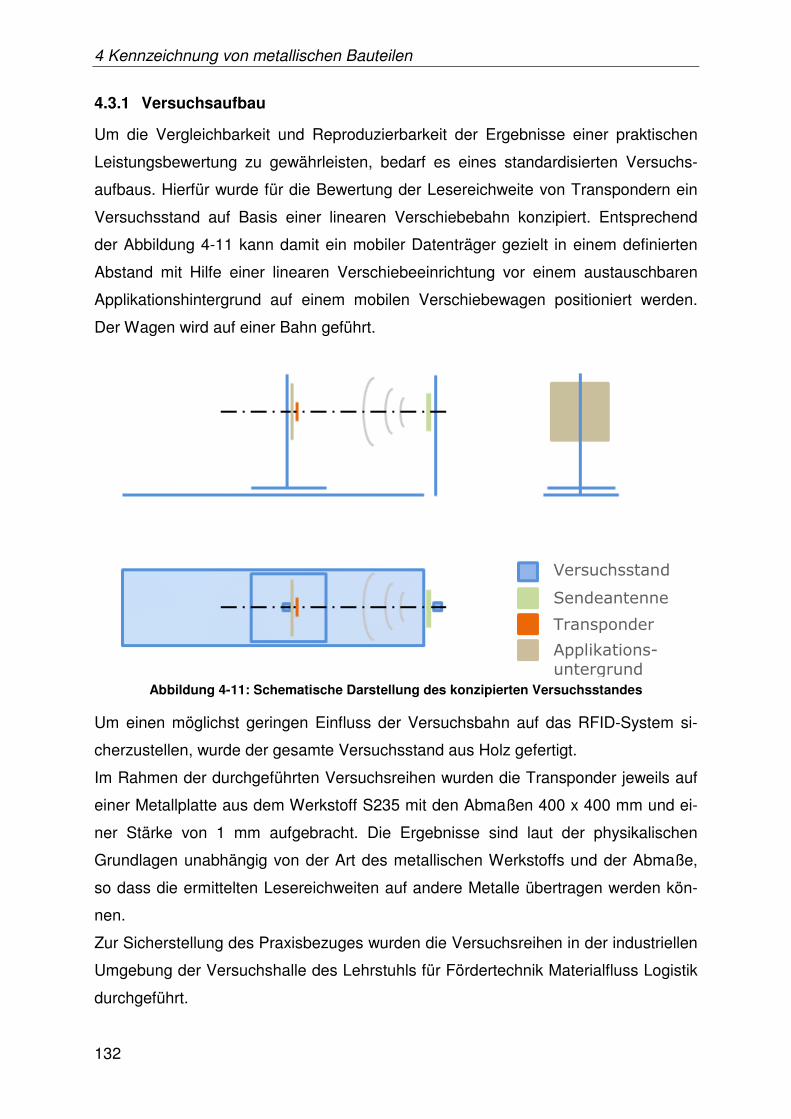

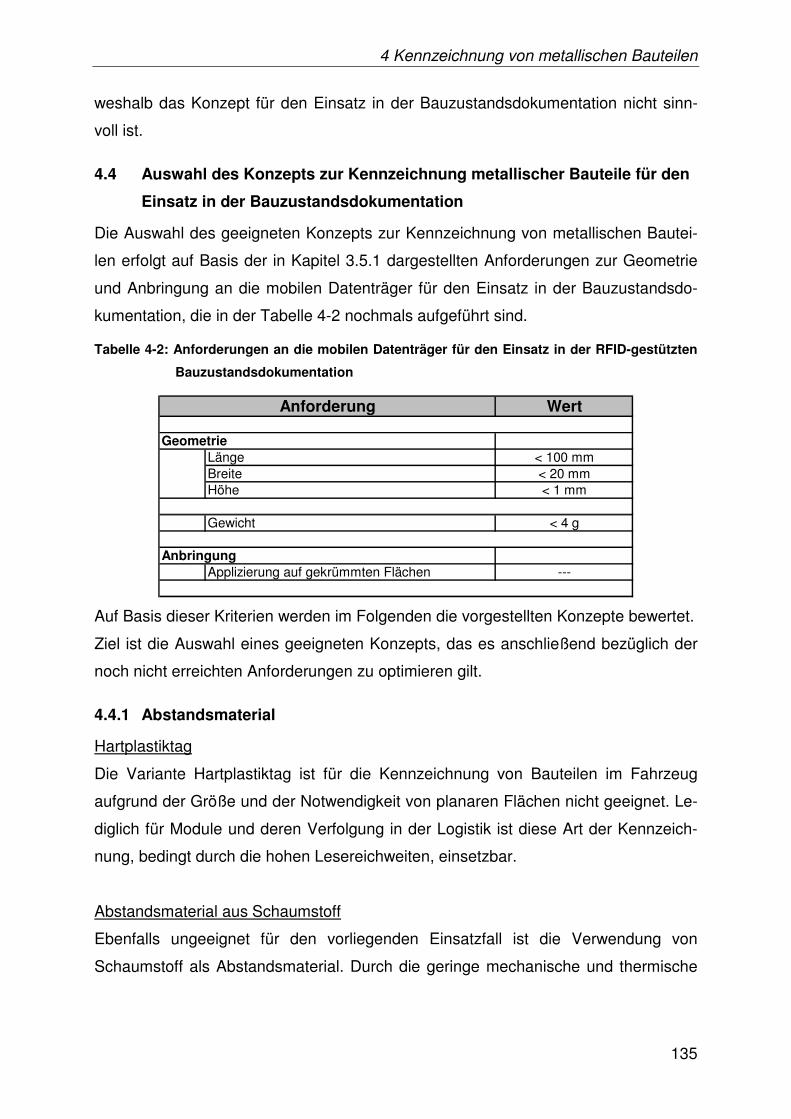

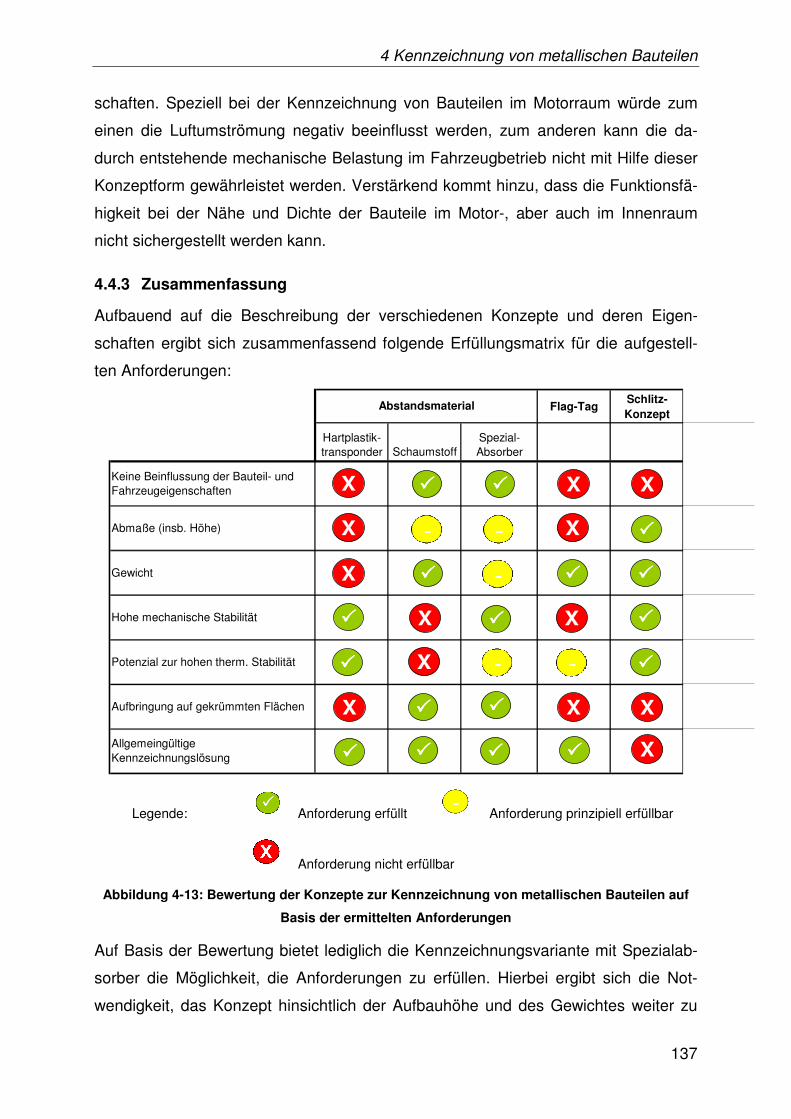
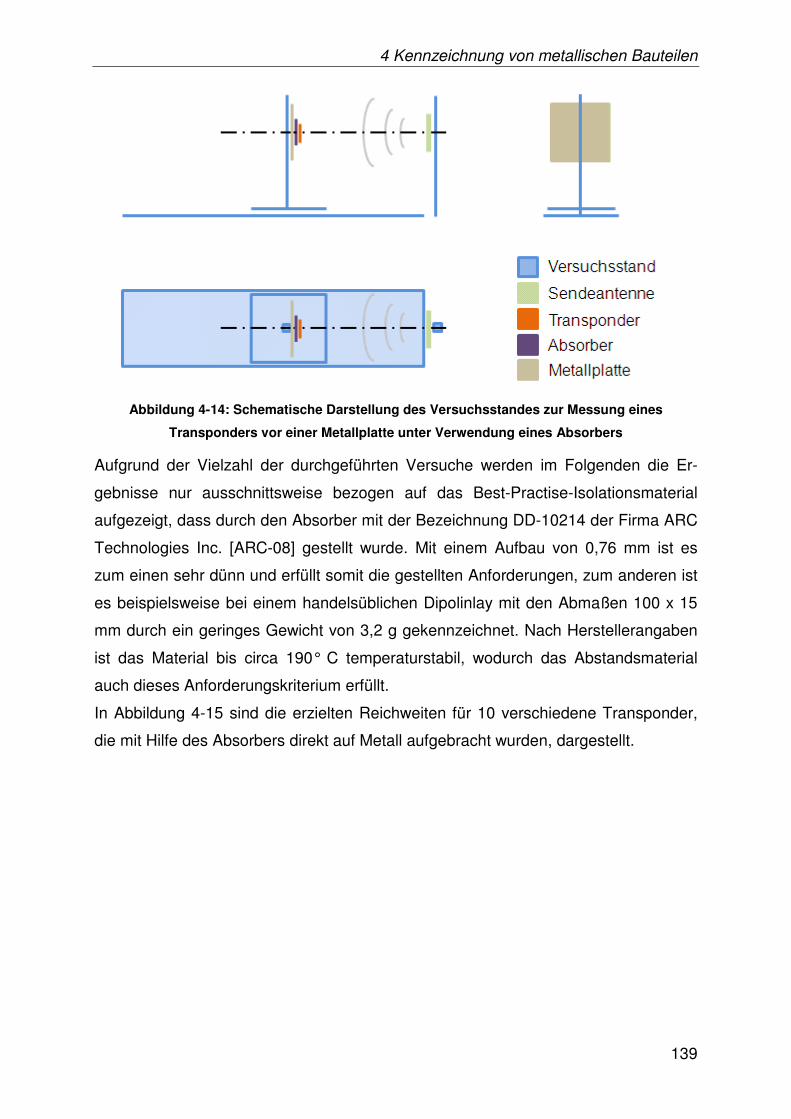


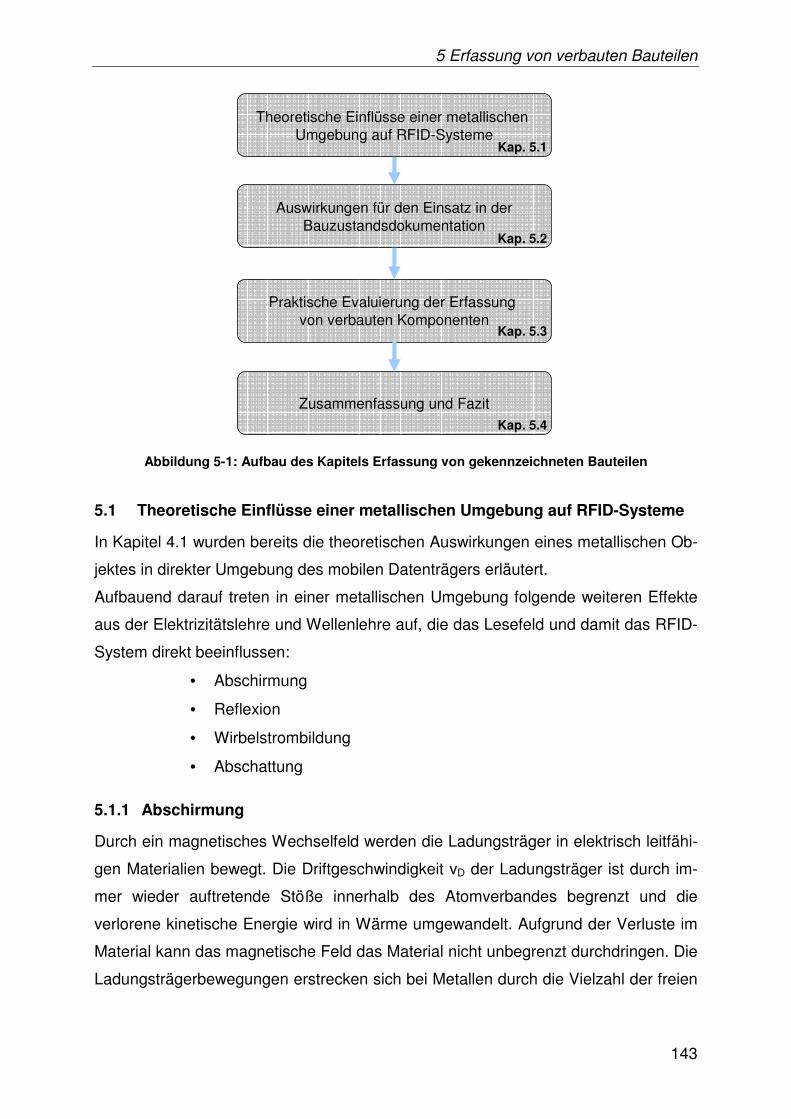
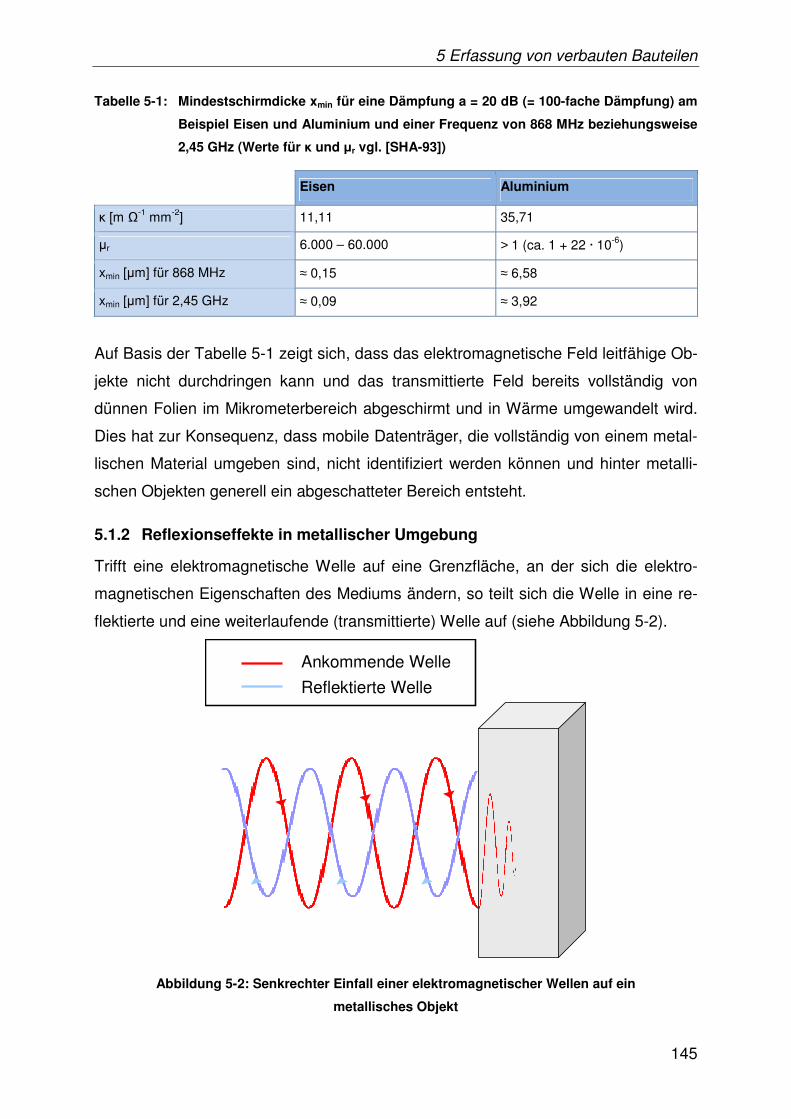

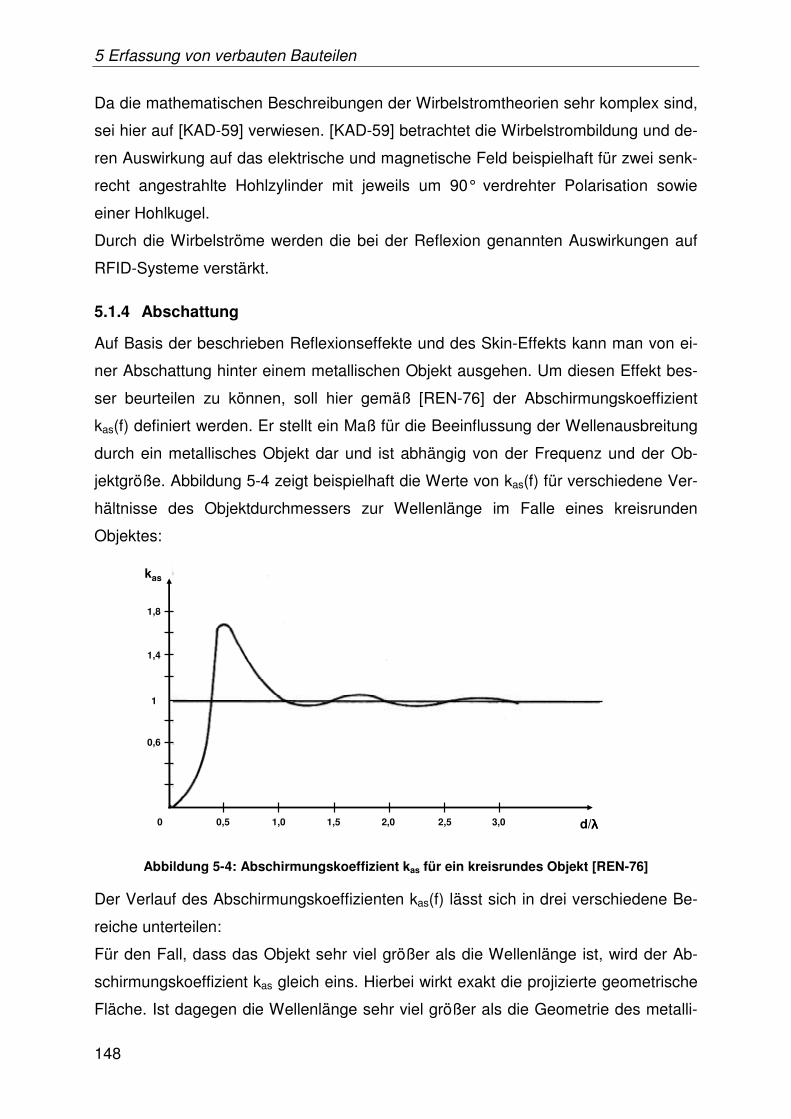
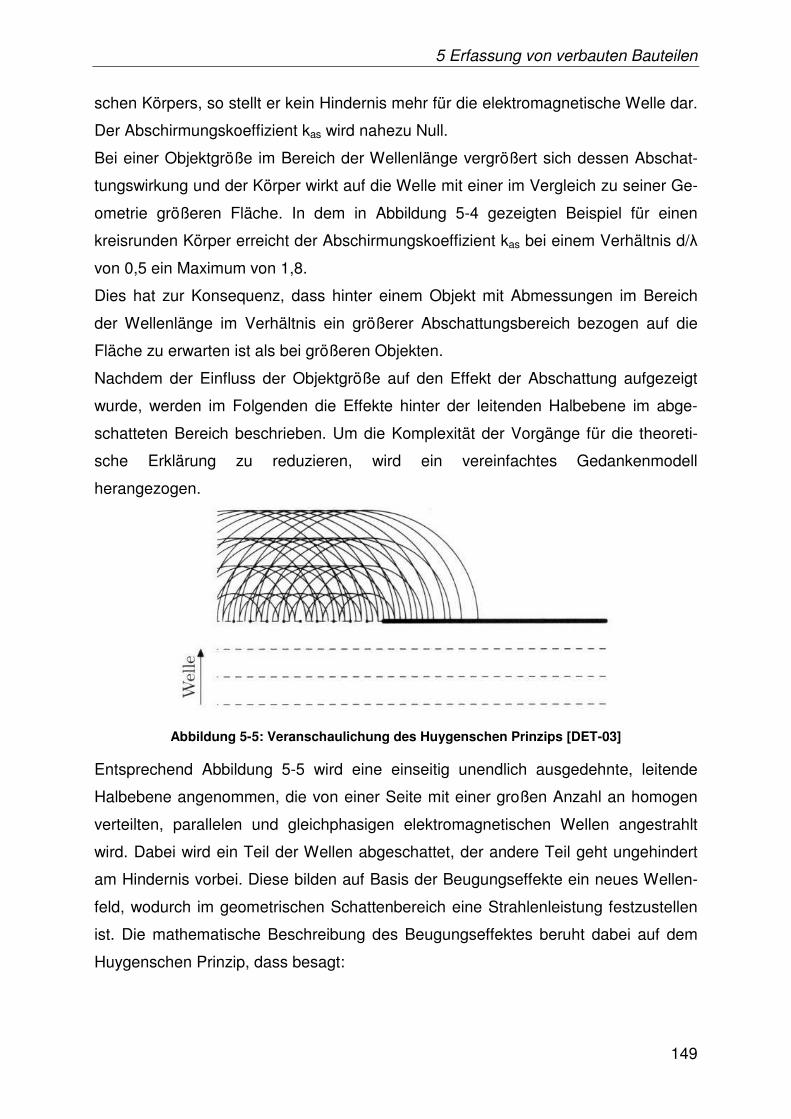
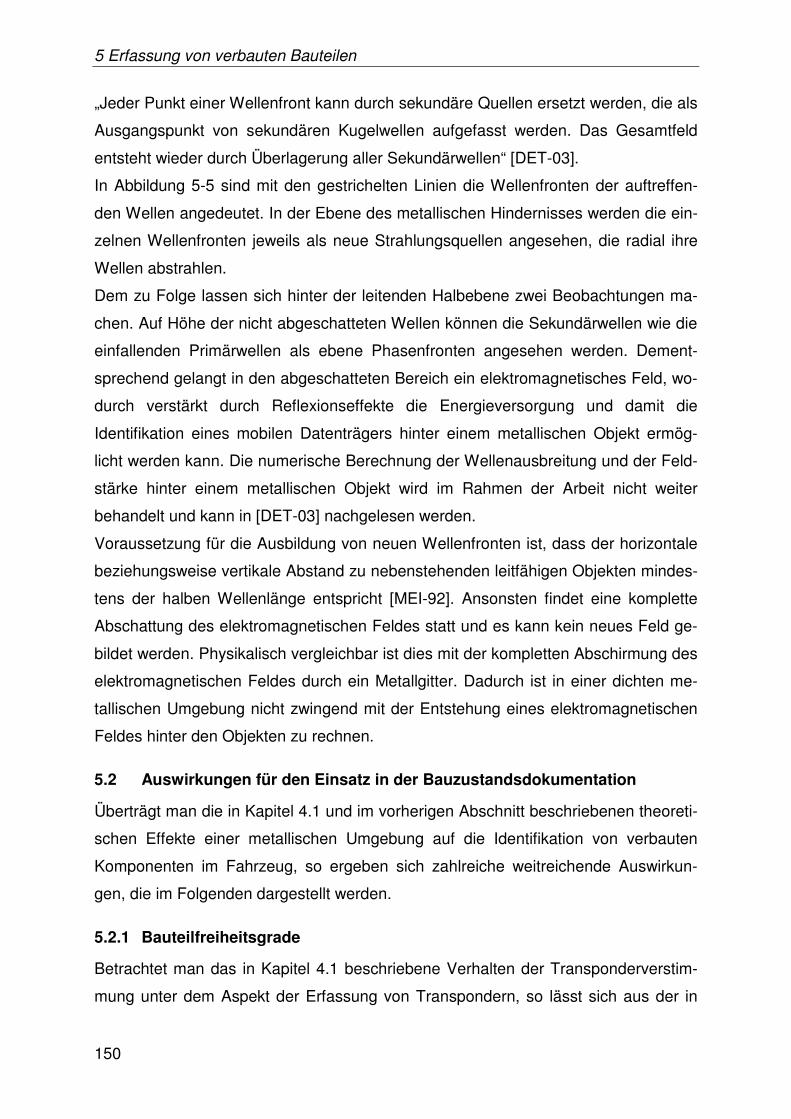



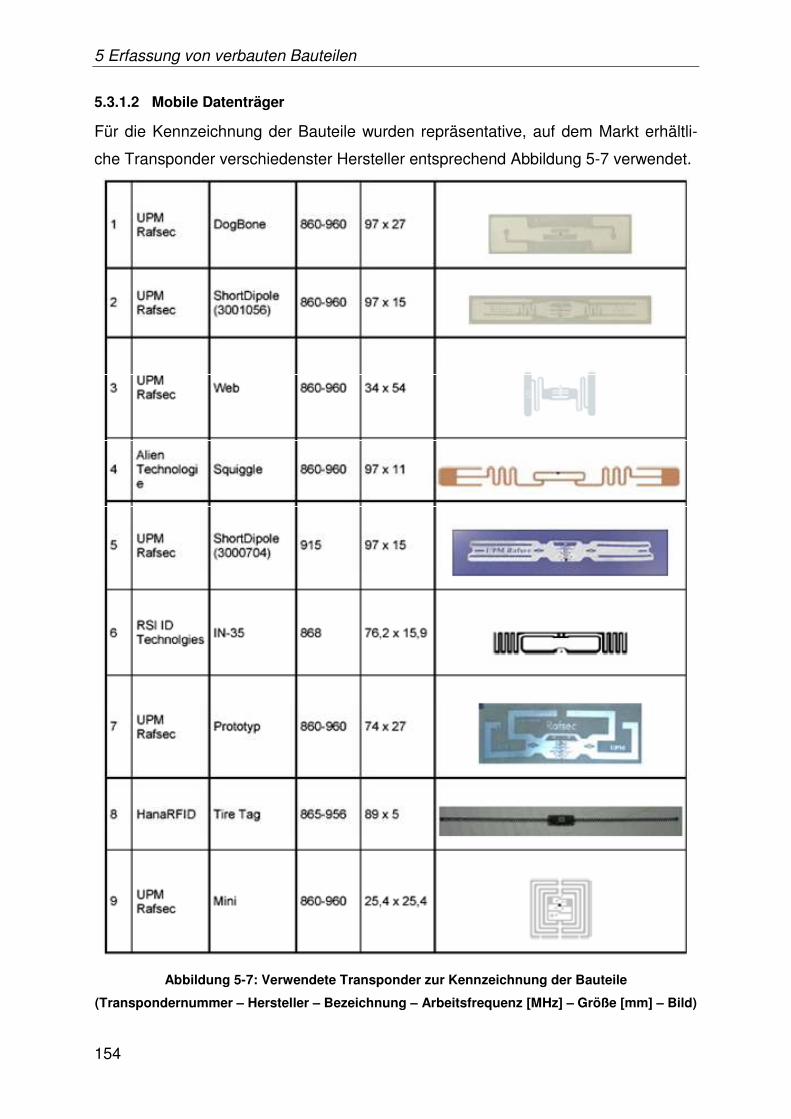
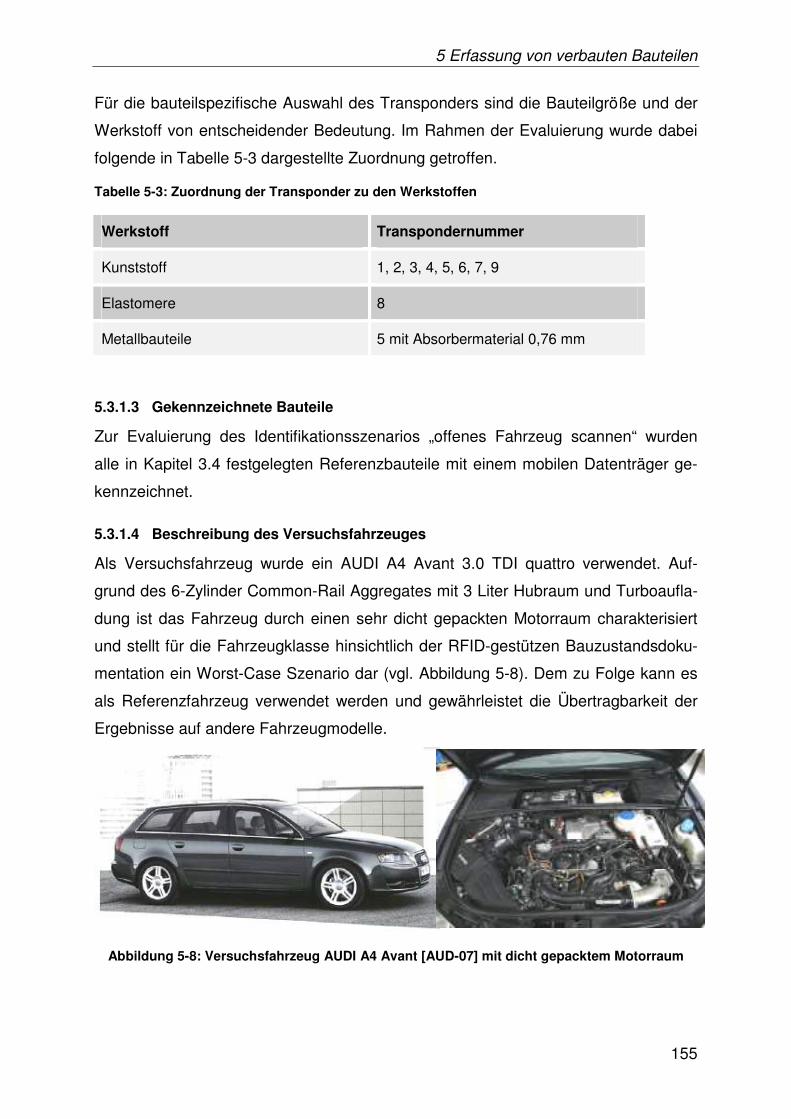






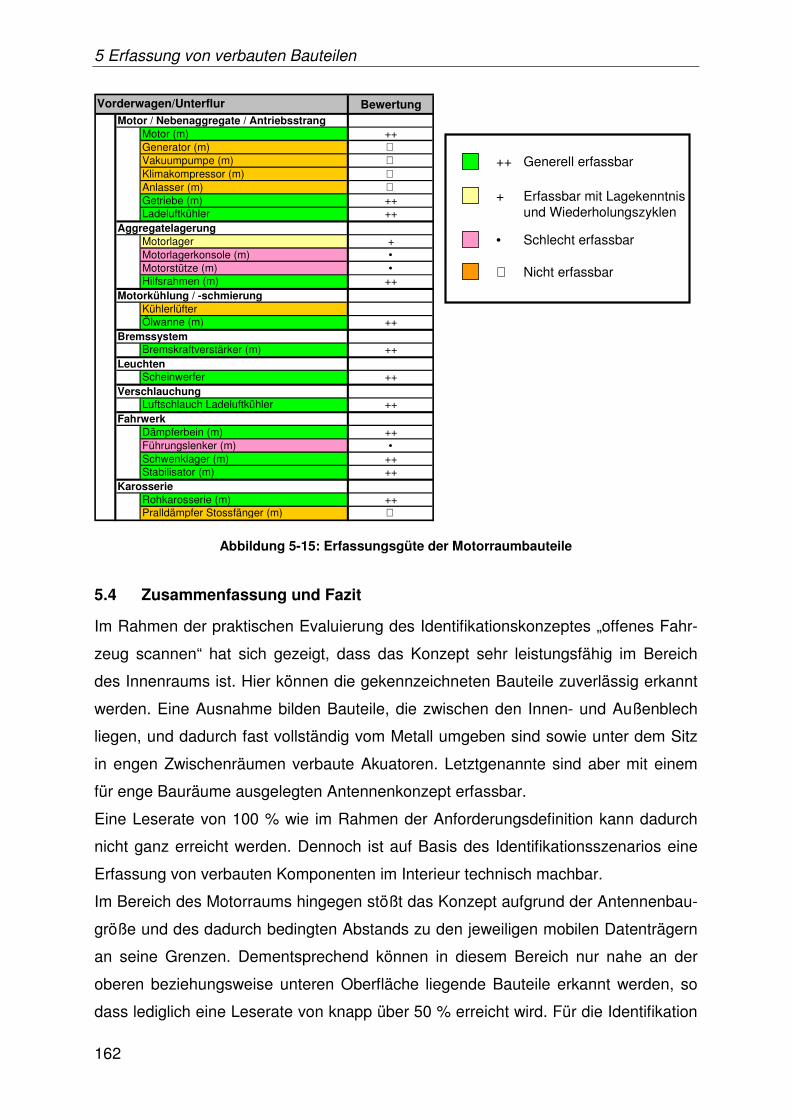

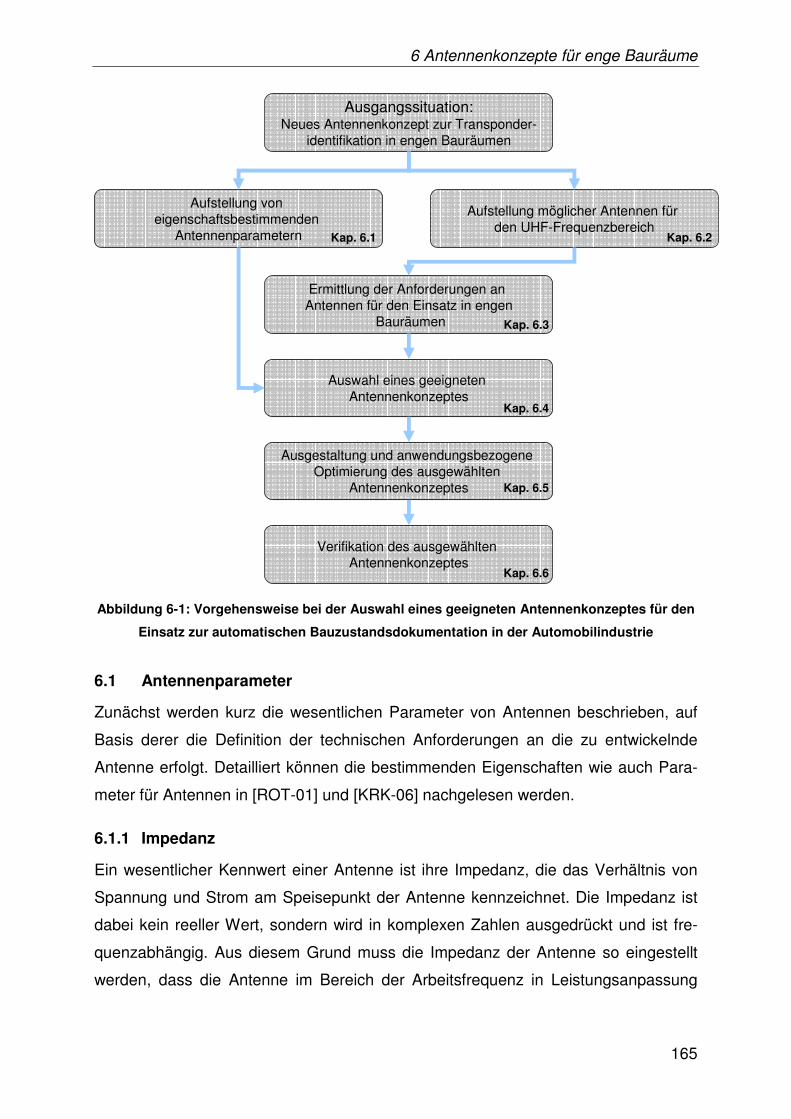


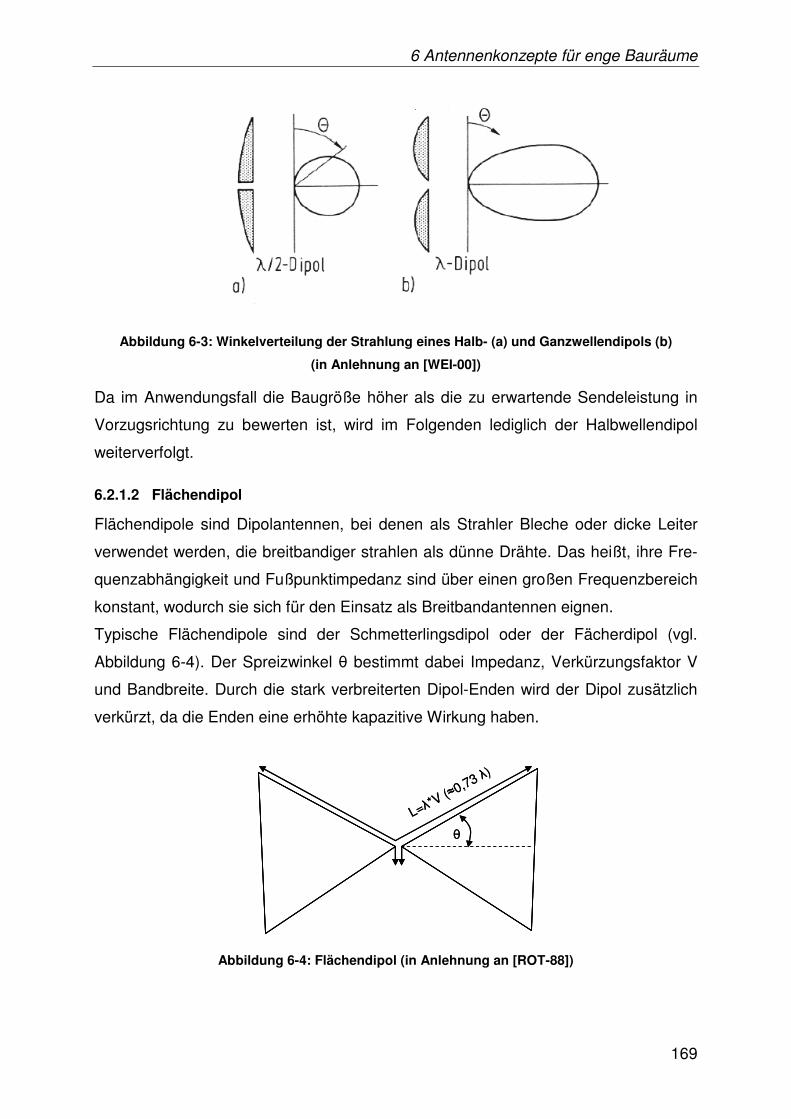

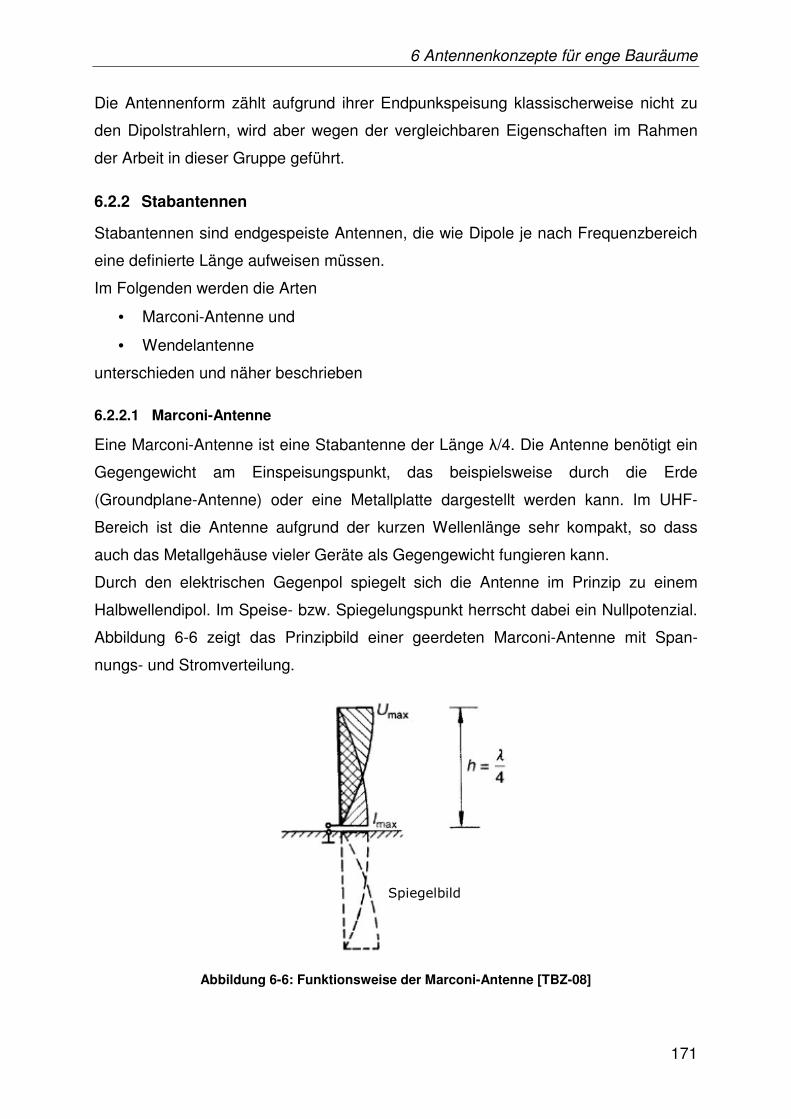
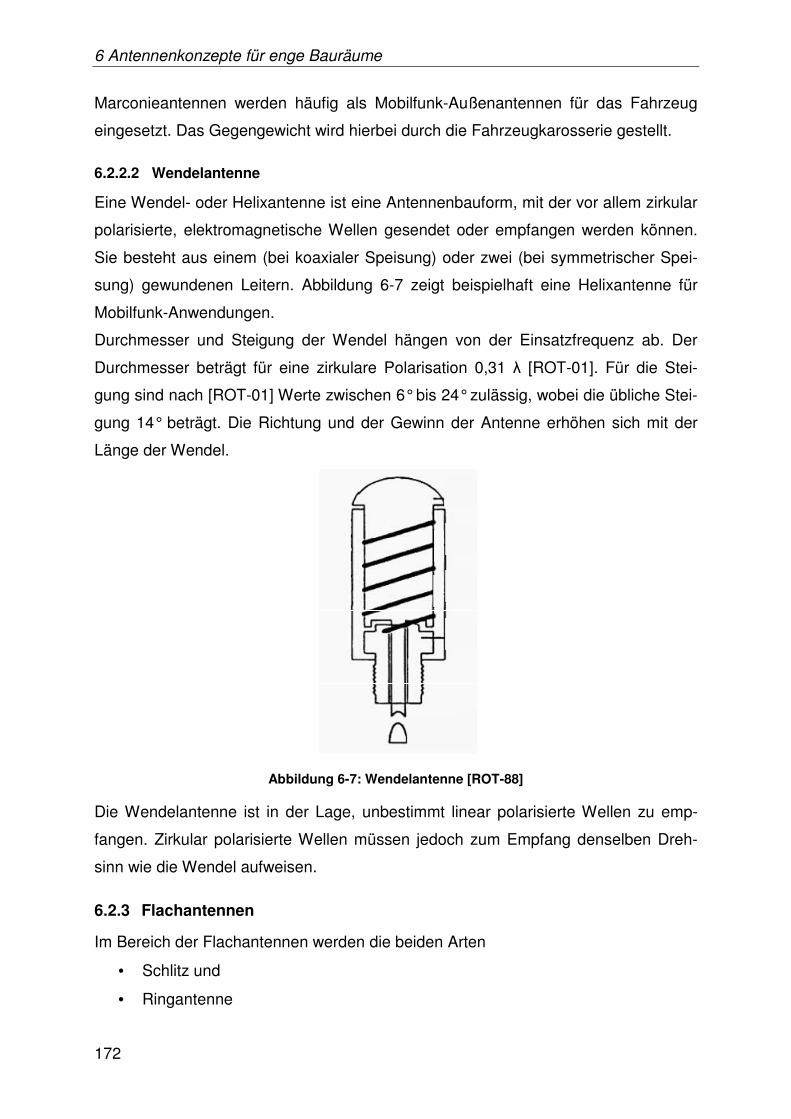
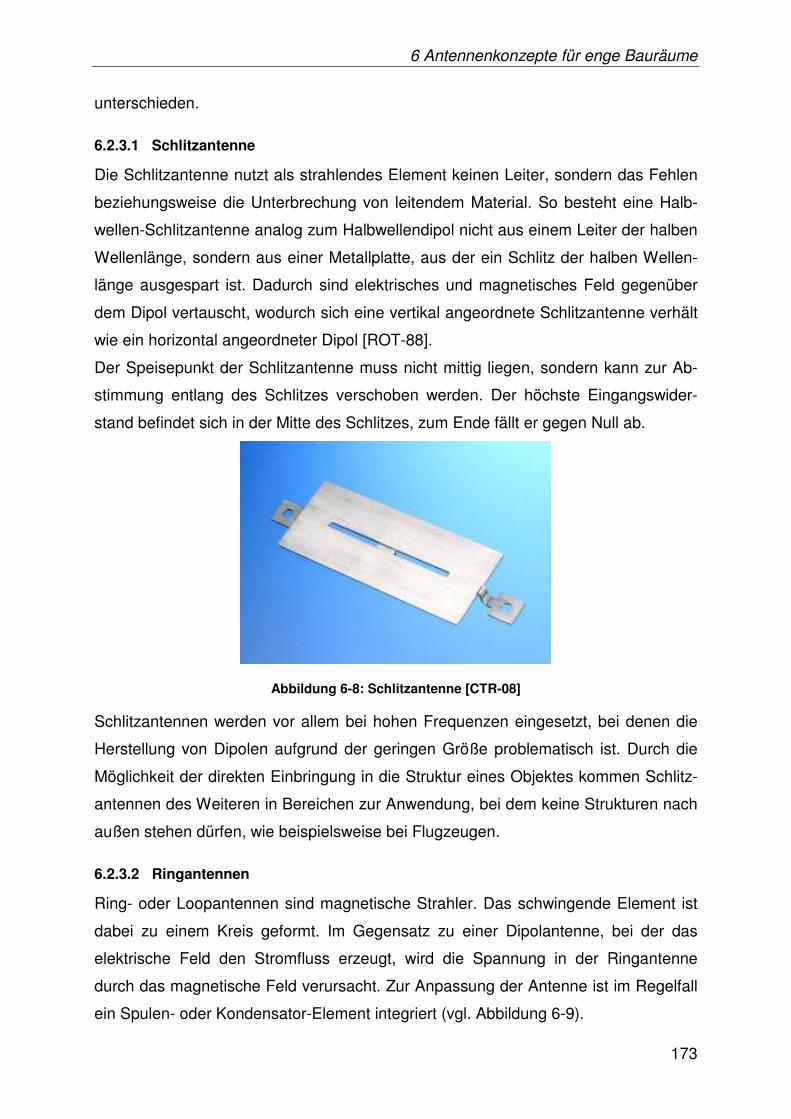




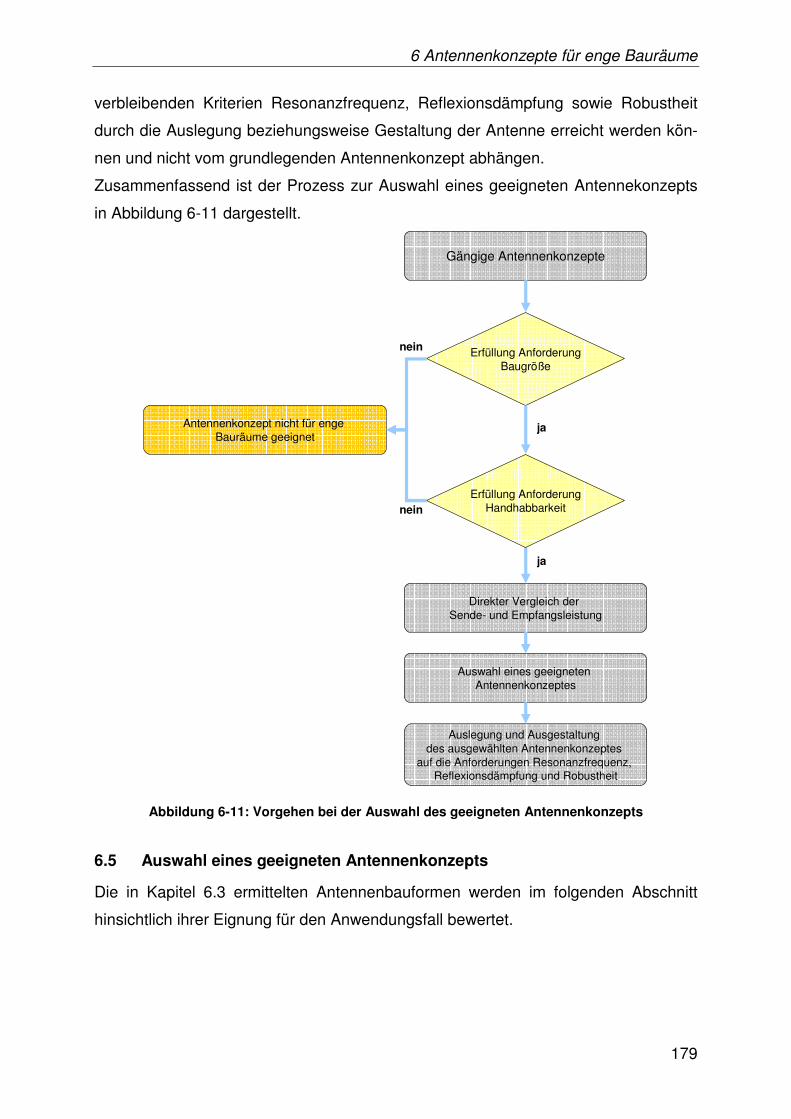

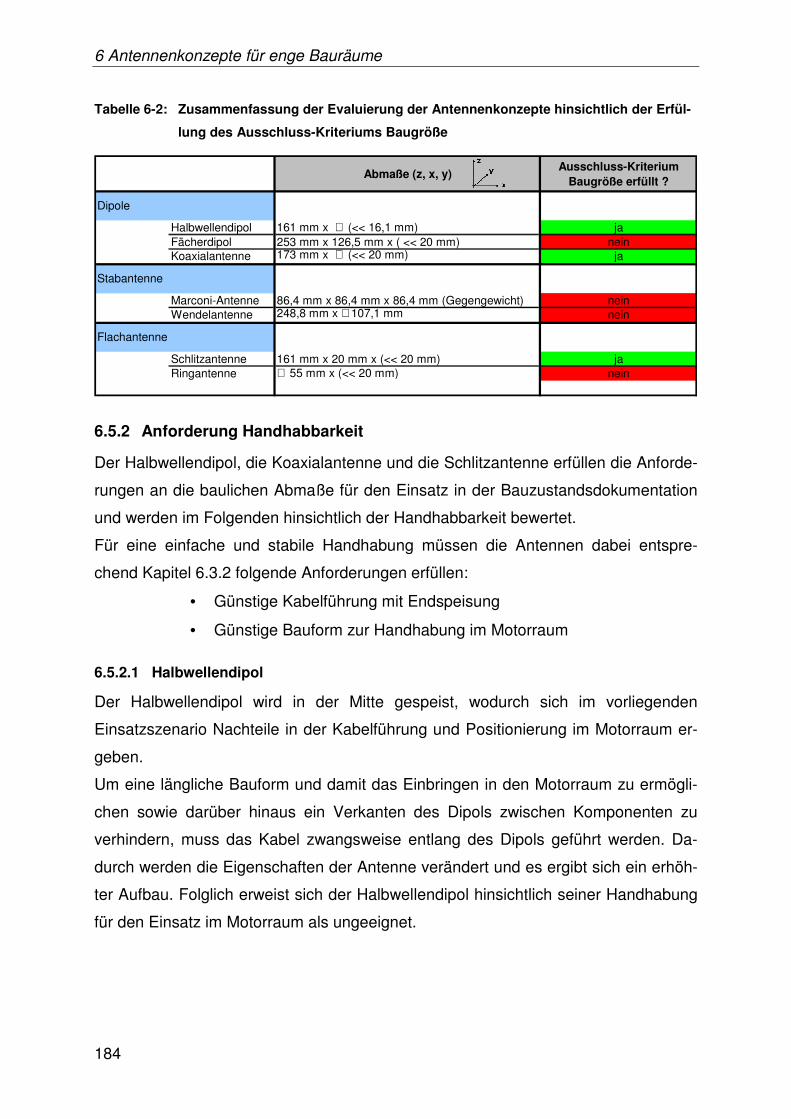
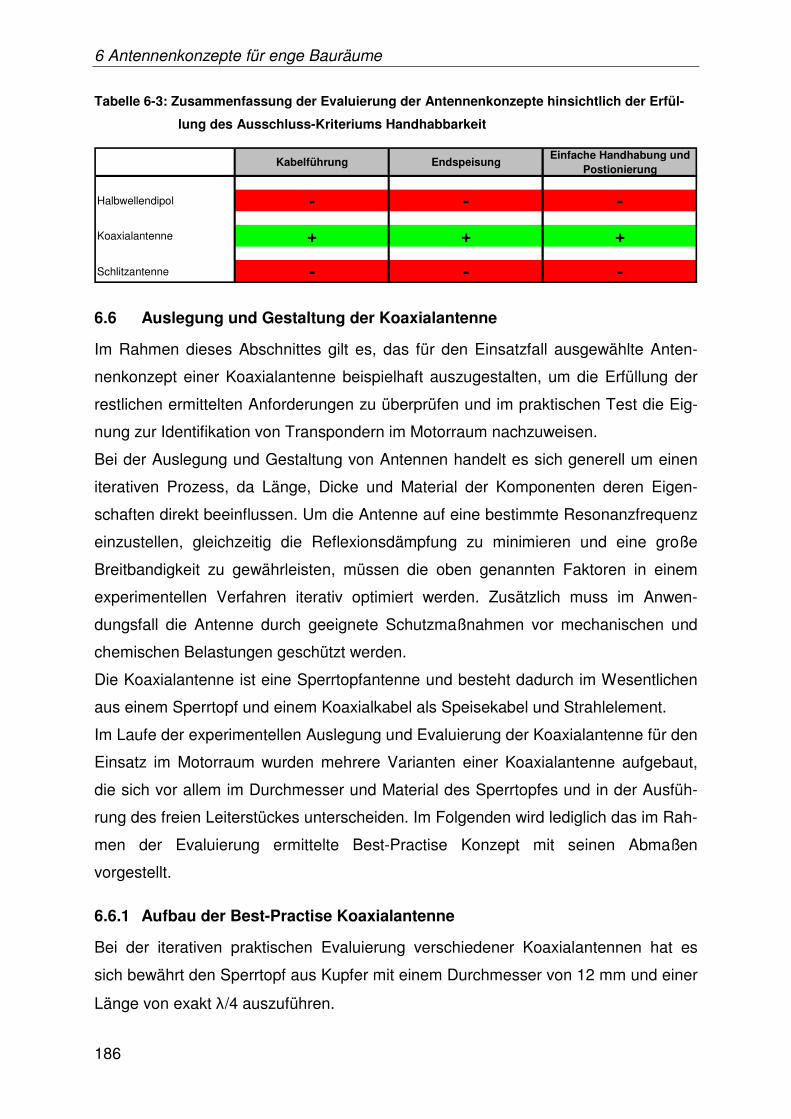
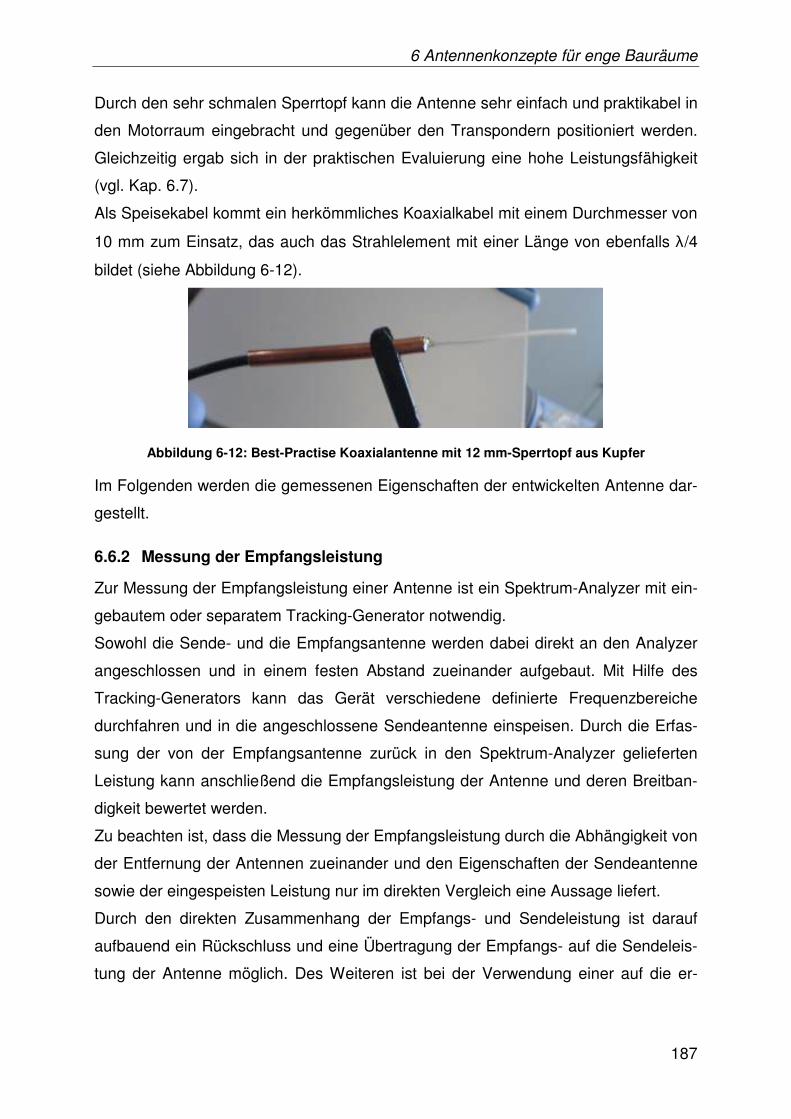

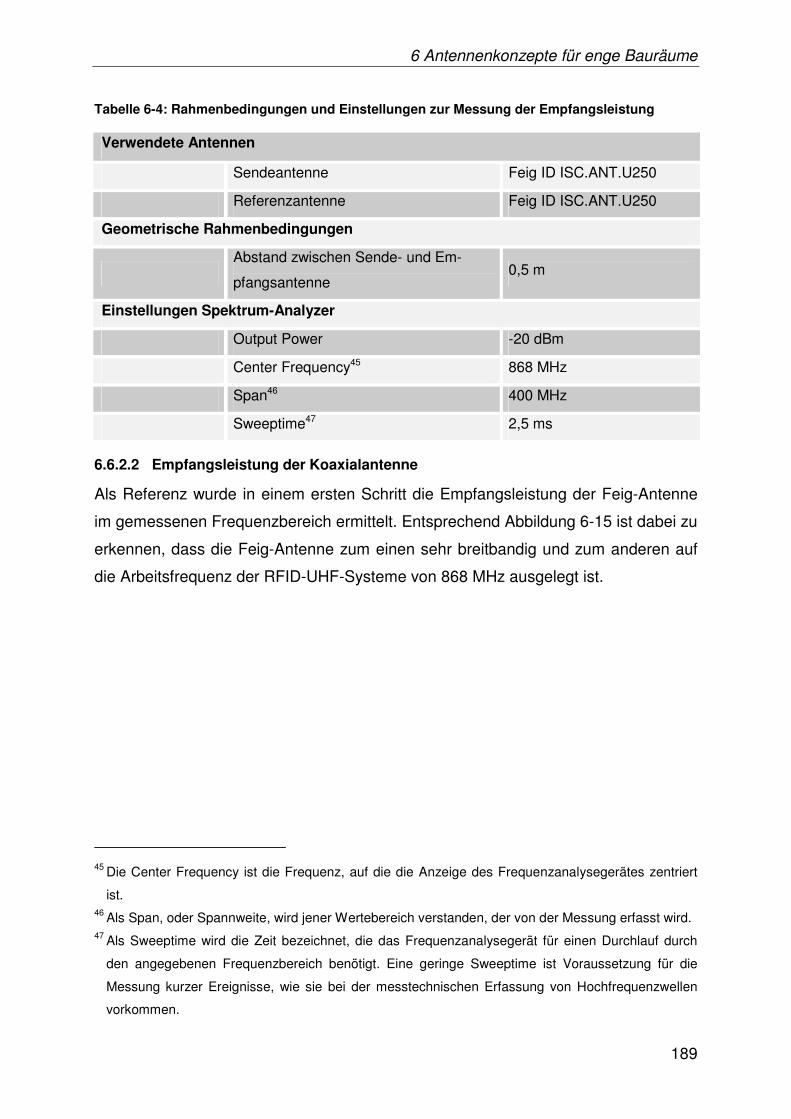
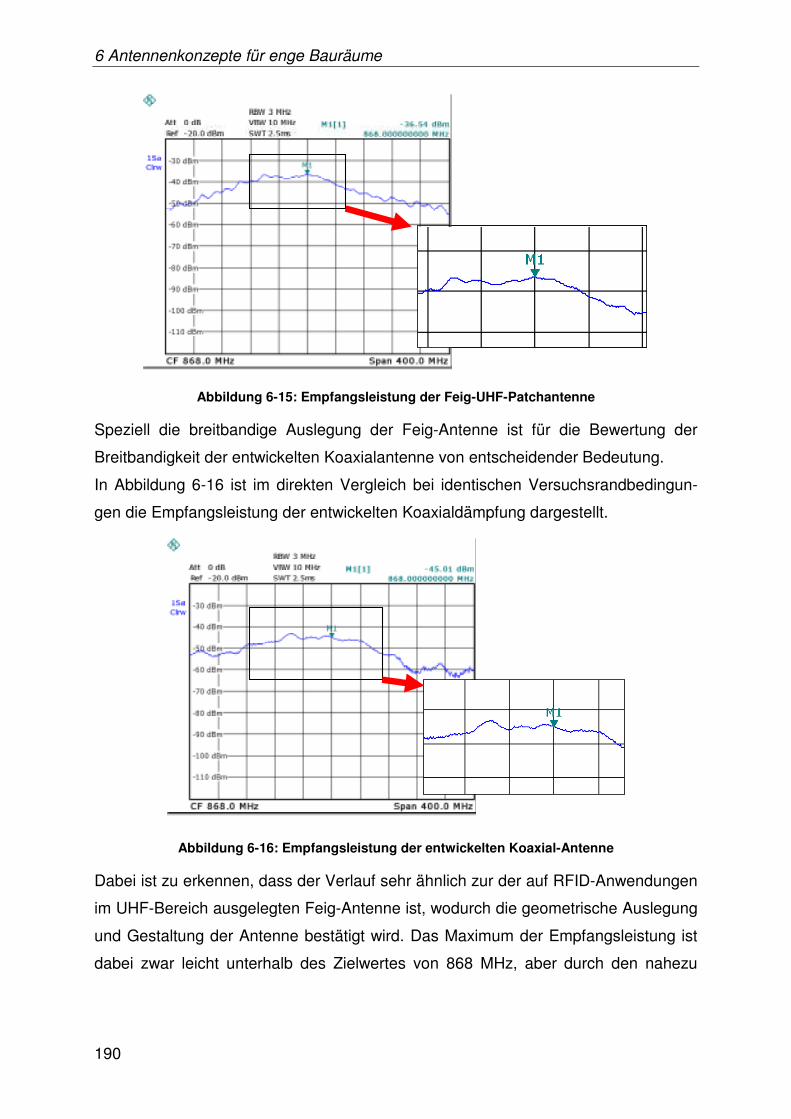



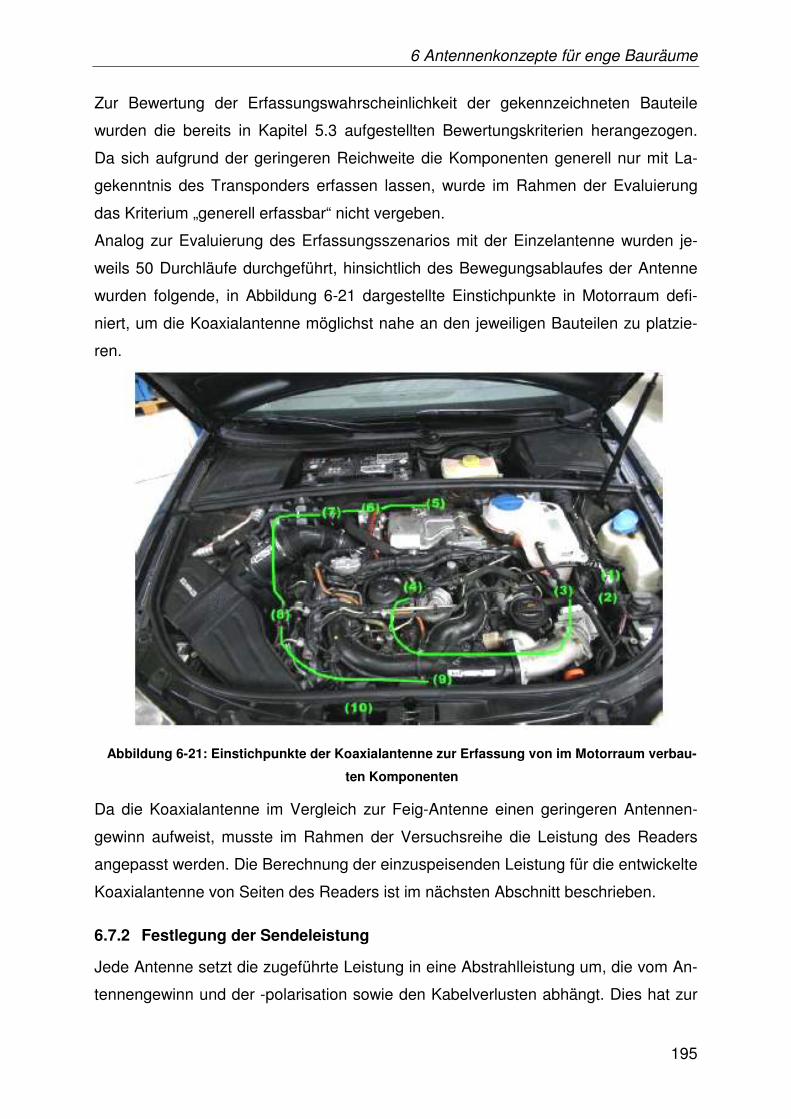
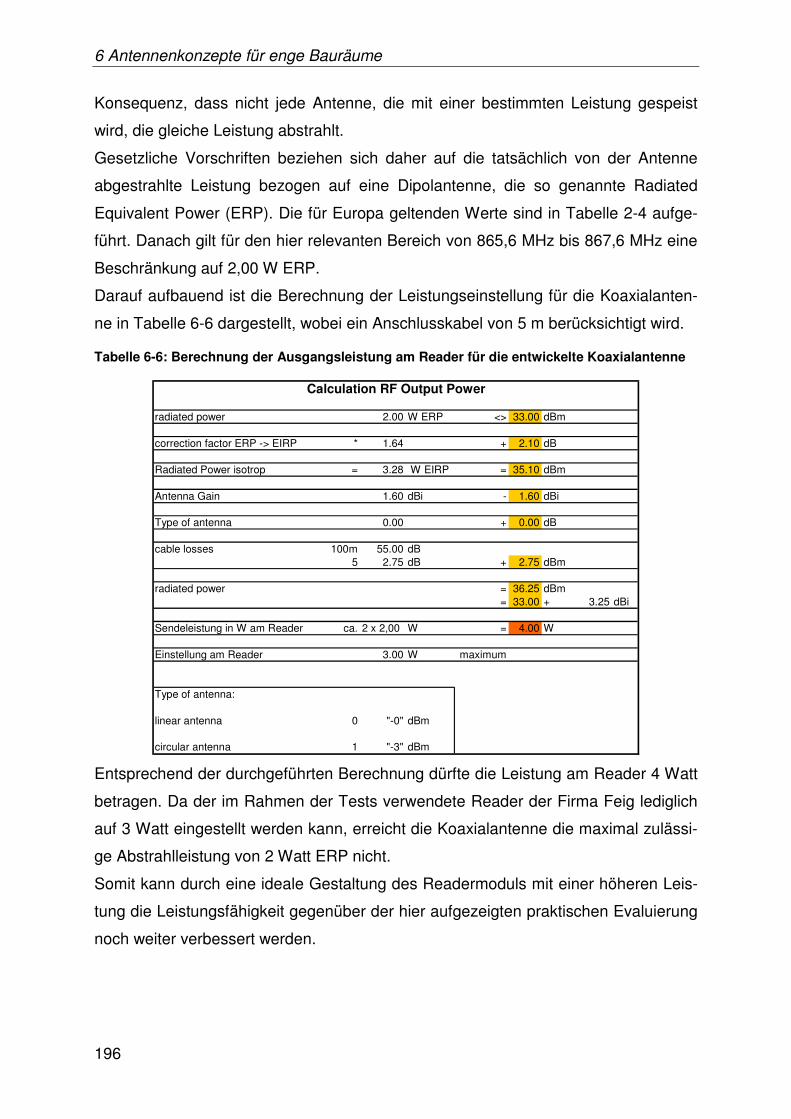

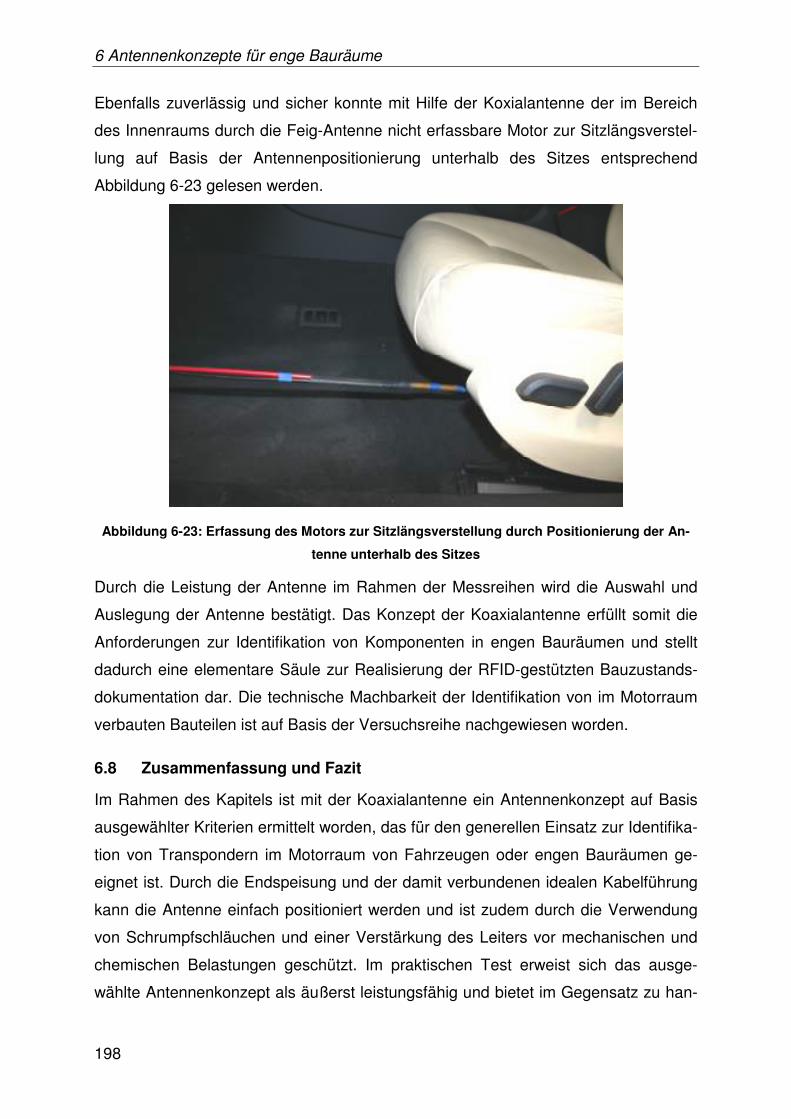













![Dimensionierung und Auslegung stark geneigter ...fml.mw.tum.de/fml/images/Publikationen/Rakitsch.pdf · DIN [-] Verschiebewiderstandsbeiwert nach DIN 15262](https://static.unterlagen.site/doc/80x56/5a9d2cd57f8b9a032a8c3972/dimensionierung-und-auslegung-stark-geneigter-fmlmwtumdefmlimagespublikationen.jpg)












