53
Eingebettete Systeme (VAK 18.142) Übung 1 Prof. Dr.-Ing. D.P.F. Möller SS 2005 Technische Systeme Systeme Informatik Leitung: Prof. Dr.-Ing. D.P.F. Möller
Eingebettete Systeme (VAK 18.142)
Übung 1Prof. Dr.-Ing. D.P.F. Möller
SS 2005
Tech
nisc
he
Syste
me
Syste
me
Info
rmat
ik
Leitung: Prof. Dr.-Ing. D.P.F. Möller
Embedded Systems (EBS) Übung 1Aufgabe 1.1
Was versteht man unter einem eingebetteten System?
Eingebettete Systeme sind wohl definierte Architekturen bezüglich der Entscheidung, welche Systemteile besser in Hardware bzw. Software realisierbar sind; sowohl in heterogenen Umgebungen, als auch inmittleren bis kleinen Elektronik-Systemen für spezielle Anwendungen entworfen.
Eingebettete Systeme führen dedizierte Funktionen innerhalb des Gesamtsystems aus.
Embedded Systems (EBS) Übung 1Aufgabe 1.1
Was versteht man unter einem eingebetteten System?
Eingebettete Systeme
sind
informationsverarbeitende Systeme
bestehend aus Hardware- und Softwarekomponenten, als integraler Bestandteil komplexer mikroelektronischer bzw. mechatronischerSysteme, die diese, meist interaktiv, steuern bzw. regeln. Eingebettete Systeme sind häufig in größere, teilweise heterogeneUmgebungen eingefügt.
Embedded Systems (EBS) Übung 1Aufgabe 1.2
Geben Sie Beispiele für eingebettete Systeme in den Bereichen Automobiltechnik, Flugzeugtechnik, Automatisierungstechnik, Medizintechnik, Konsumgüterbereich an.
Automobiltechnik:ABS (Antiblockiersystem)Adaptives KurvenlichtESP (Elektronisches Stabilitätsprogramm)Elektronisches EinspritzsystemNavigationssystemInfotainmentTempomatFly by wire
Embedded Systems (EBS) Übung 1Aufgabe 1.2
Geben Sie Beispiele für eingebettete Systeme in den Bereichen Automobiltechnik, Flugzeugtechnik, Automatisierungstechnik, Medizintechnik, Konsumgüterbereich an.
Flugzeugtechnik:Autopilot Künstlicher HorizontHeckruderstabilisatorenFlügeldynamikInfotainmentTriebwerkkontrolleMechatronisches Monitoring
Embedded Systems (EBS) Übung 1Aufgabe 1.2
Geben Sie Beispiele für eingebettete Systeme in den Bereichen Automobiltechnik, Flugzeugtechnik, Automatisierungstechnik, Medizintechnik, Konsumgüterbereich an.
Automatisierungstechnik:ProzessregelungRobotikSensor/Aktor InterfaceBluetoothBusse: Profibus, DeviceNet, CANopen,Interbuse-wire systems
Embedded Systems (EBS) Übung 1Aufgabe 1.2
Geben Sie Beispiele für eingebettete Systeme in den Bereichen Automobiltechnik, Flugzeugtechnik, Automatisierungstechnik, Medizintechnik, Konsumgüterbereich an.
Medizin: Überwachungssysteme (Monitoring)Elektronische GasdosierungGlukosetester InfusionspumpenRespiratorenInkubatorenEEG SystemeEKG System
Embedded Systems (EBS) Übung 1Aufgabe 1.2
Geben Sie Beispiele für eingebettete Systeme in den Bereichen Automobiltechnik, Flugzeugtechnik, Automatisierungstechnik, Medizintechnik, Konsumgüterbereich an.
Konsumgüter: CCD Kamera MobiltelephonWalkmanDisk drives, TV set-top boxes, VCR´s, CD/DVD Systeme
Embedded Systems (EBS) Übung 1Aufgabe 1.3
Geben Sie die Vorteile eingebetteter Systeme an.Vorteile eingebetteter Systeme• vielfältigere Anwendungen, • höhere Systemkomplexität/Leistungsanforderungen,• kürzere Time-to-Market in Entwicklung & Produktion,• Senkung der Entwurfs- und Testkosten durch HW/SW-
Partitionierung, d.h. Aufteilung der Funktionalität in HW-und SW-Komponenten
• Entwurf auf verschiedenen Entwurfsebenen:# Algorithmische Ebene# Register-Transfer-Ebene# Logikebene
Embedded Systems (EBS) Übung 1Aufgabe 1.4
Listen Sie die Hauptmerkmale eingebetteter Systeme auf und vergleichen Sie diese mit anderen Rechnerarchitekturen.
Hauptmerkmale eingebetteter Systeme• Einzelfunktionalität → spezifische Funktion z.B. Pager• Responsivität → Realtime, Hard Realtime, d.h. Reaktionszeit auf
Anforderungen/Änderungen• Feste constraints → bezüglich Entwurfsmetrik; d.h. Beschreibung
der Implementierungseigenschaften (Features)KostenGrößePerformancePoweretc.
Embedded Systems (EBS) Übung 1Aufgabe 1.5
Was versteht man unter einer Entwurfsmetrik?
EntwurfsmetrikEinheitliche Beschreibung des Entwurfs eingebetteter Systeme durch eine Metrik, die den Erfüllungsgrad einer Zugehörigkeitsfunktion abbildet in der allgemeinen Form der n-Tupel Notation z.B. als Tripelnotation
Embedded Systems (EBS) Übung 1Aufgabe 1.6
Listen Sie mindestens drei Merkmale für die Entwurfsmetrik einge-betteter Systeme auf und erklären Sie ihre Bedeutung für den drei-dimensionalen Entwurfsraum
Drei Merkmale für die Entwurfsmetrik
Embedded Systems (EBS) Übung 1Aufgabe 1.7
Geben Sie eine Tripelnotation für Performance, Kosten und Echtzeit-fähigkeit für den Entwurf eines eingebetteten Systems an, basierend auf einem Mikroprozessor/Mikrocontroller, FLPD und einer HW-SW-Partitionierung.
Tripelnotation C, P, R:• Mikroprozessor/Mikrocontroller
min E(ψ) = E(1,0,0)d.h. Kostenfunktional optimal erfüllt, Performance und Realtime Anforderung nicht
• FPLD-Architekturmin E(ψ) = E(0,1,1)d.h. Kostenfunktional wird nicht Rechnung getragen, wohl aber Performance und Realtime Verhalten
• Hardware-Software-Partitionierungmin E(ψ) = E(1,1,1)d.h. bei Hardware-Software-Partitionierung wird Architektur erzeugt welche dereingeführten Metrik optimal genügt

Embedded Systems (EBS) Übung 1Aufgabe 1.8
Was versteht man unter einem Marktfenster?
MarktfensterZeitspanne während der mit einem Produkt die größten Umsätze und Erträge im Markt realisiert werden können
Embedded Systems (EBS) Übung 1Aufgabe 1.9
Was versteht man unter NRE?
NRE: (Non-Recuring Engineering Cost): Einmalige Entwicklungskosten des einbetteten Systems → nach Abschluss der Entwicklung können beliebige Stückzahlen produziert werden ohne das es zu zusätzlichen Entwicklungskosten kommt
Embedded Systems (EBS) Übung 1Aufgabe 1.10
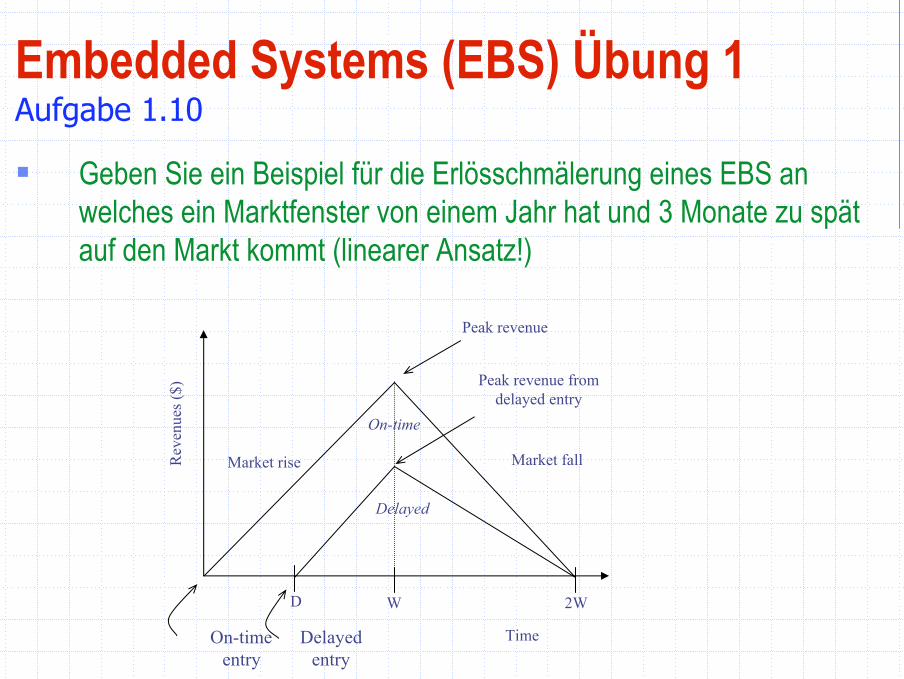
Geben Sie ein Beispiel für die Erlösschmälerung eines EBS an welches ein Marktfenster von einem Jahr hat und 3 Monate zu spät auf den Markt kommt (linearer Ansatz!)
On-time Delayedentry entry
Peak revenue
Peak revenue from delayed entry
Market rise Market fall
W 2W
Time
D
On-time
Delayed
Rev
enue
s ($)
Embedded Systems (EBS) Übung 1Aufgabe 1.10
Geben Sie ein Beispiel für die Erlösschmälerung eines EBS an welches ein Marktfenster von einem Jahr hat und 3 Monate zu spät auf den Markt kommt (linearer Ansatz!)
Beispiel ErlösschmälerungProduktlebenszeit 1 Jahr (52 Wochen), d.h. 2W; maximaler Gewinn nach H = 26Verzögerung = 3 Monate = 12 Wochen → Prozentual Entgangener Gewinn PEG (Percentage revenue loss = (D(3W-D)/2W2)*100%)
PEG → (12*(3*26 –12)/2*262) = 58%
Embedded Systems (EBS) Übung 1Aufgabe 1.11
Welche Beziehung gilt für die Produktkosten in Abhängigkeit des Volumens?
Produktkosten in Abhängigkeit des Volumens
Produktanteilige Kosten = Gesamtkosten / Stückzahl= NRE Kosten / Stückzahl+Stückkosten
total cost = NRE cost + unit cost * # of unitsper-product cost = total cost / # of units
= (NRE cost / # of units) + unit cost
Embedded Systems (EBS) Übung 1Aufgabe 1.12
Listen Sie die drei Schlüsseltechnologien für EBS auf. Beschreiben Sie die Vor- und Nachteile der drei Schlüsseltechnologien.
Schlüsseltechnologien
Technologie A: Prozessor TechnologieTechnologie B: IC TechnologieTechnologie C: Entwurf Technologie
Embedded Systems (EBS) Übung 1Aufgabe 1.13
Technologie A hat NRE Kosten von Є 2.000 und Stückkosten von Є 100 Technologie B hat NRE Kosten von Є 30.000 und Stückkosten von Є 30Technologie C hat NRE Kosten von Є 100.000 und Stückkosten von Є 2
Daraus lassen sich die Gesamtkosten (Total Cost) über der Stückzahl (Number of units) angeben wie folgt:
Gesamtkosten = NRE Kosten + Stückkosten * Stückzahl
Technologie A hat die geringsten Gesamtkosten bei kleinen Stückzahlen (1-400),Technologie B hat die geringsten Gesamtkosten bei mittleren Stückzahlen (400-2500),Technologie C hat die geringsten Gesamtkosten bei großen Stückzahlen (>2500)
Embedded Systems (EBS) Übung 1Aufgabe 1.14
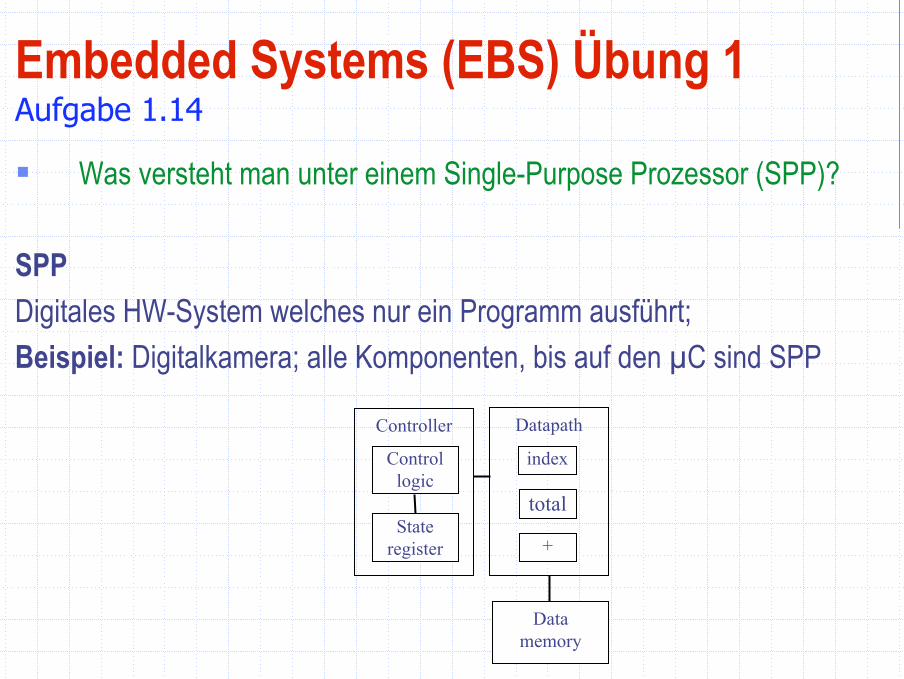
Was versteht man unter einem Single-Purpose Prozessor (SPP)?
SPPDigitales HW-System welches nur ein Programm ausführt; Beispiel: Digitalkamera; alle Komponenten, bis auf den µC sind SPP
DatapathController
Control logic
State register
Datamemory
index
total
+
Embedded Systems (EBS) Übung 1Aufgabe 1.15
Was versteht man unter einem General-Purpose Prozessor (GPP)?
GPP• Digitaler Schaltkreis der eine Berechnung durchführt• Steuerwerk und Rechenwerk• Programmierbar• Time –to-Market kurz• Kosten auch bei kleinen Stückzahlen gering da Halbleiterhersteller
die NRE Kosten auf die gesamte Stückzahl verteilt• Flexibilität groß da nur Code geändert werden muss
Embedded Systems (EBS) Übung 1Aufgabe 1.15
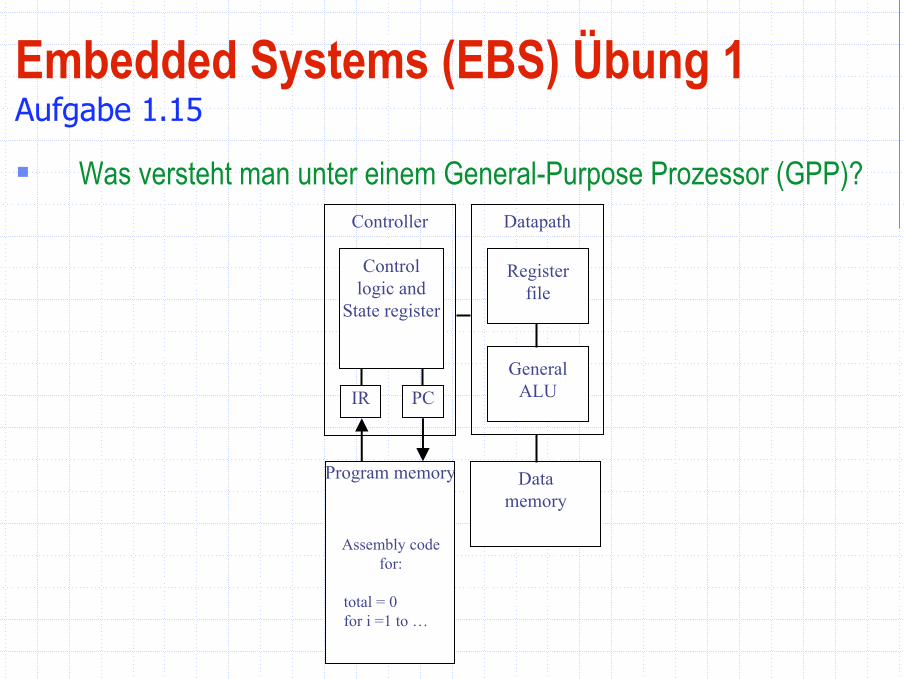
Was versteht man unter einem General-Purpose Prozessor (GPP)?
IR PC
Registerfile
GeneralALU
DatapathController
Program memory
Assembly code for:
total = 0for i =1 to …
Control logic and
State register
Datamemory
Embedded Systems (EBS) Übung 1Aufgabe 1.16
Was versteht man unter einem Application-Specific-Instruction-SetProzessor?
ASIP: programmierbarer Prozessorkern für bestimmte Klasse von Anwen-dungen, die sich durch gleiche Charakteristiken darstellen lassen, z.B.:
~Embedded Control (EC)~DSP~Telekommunikation
µC und DSP sind zwei typische Vertreter für ASIPs• µC: µP der für EC Anwendungen optimiert wurde• DSP: µP der für digitale Signalverarbeitung optimiert wurde,
repräsentiert durch spezielle Tasks wie ~Signalfilterung~Transfomationend.h. rechenintensive mathematische Operationen
Embedded Systems (EBS) Übung 1Aufgabe 1.17
Warum kostet ein General-Purpose Prozessor weniger als ein Single-Purpose-Prozessor?
Geringere NRE wegen größerer Stückzahl
Embedded Systems (EBS) Übung 1Aufgabe 1.18
Was versteht man unter einem DSP?Für Signal Processing Anwendungen
Große Mengen digitalisierter Daten, häufig streamingDaten Transformationen müssen schnell durchgeführt werdenZ.B. Cell-phone voice filter, Digital TV, Music synthesizer
DSP EigenschaftenMehrere Ausführungseinheiten für InstruktioneMultiple-accumulate single-cycle instruction, weitere Instruktionen Effiziente Vektor Operationen – z.B. Addition von zwei Arrays
Vektor ALUs, Loop Puffer, etc.
Embedded Systems (EBS) Übung 1Aufgabe 1.19
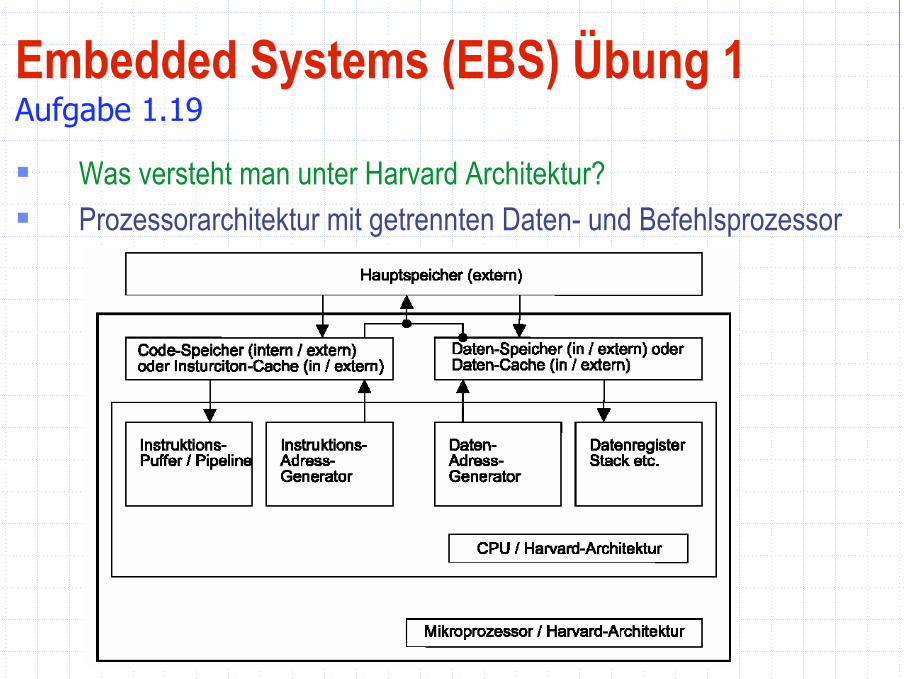
Was versteht man unter Harvard Architektur?Prozessorarchitektur mit getrennten Daten- und Befehlsprozessor
Embedded Systems (EBS) Übung 1Aufgabe 1.20
Was versteht man unter einem Mikrocontroller?MikrocontrollerEin-Chip µP: für ereignisgesteuerte Echtzeit-Regelung technischer Pro-zesse eingesetzt. Häufig für EC eingesetzt die rauen Umwelteinflüssen ausgesetzt sindRepräsentiert Integration einer CPU mit Speicher und Peripherie auf einem ChipVielzahl vom µC enthalten µP, der zuerst für General PurposeAnwendungen entwickelt und später mit Veränderungen im EmbeddedBereich eingesetzt wurde.
Embedded Systems (EBS) Übung 1Aufgabe 1.21
Was versteht man unter einem Mikroprozessor
MikroprozessorMikro miniaturisierter universell programmierbarer Digitalrechner
Embedded Systems (EBS) Übung 1Aufgabe 1.22
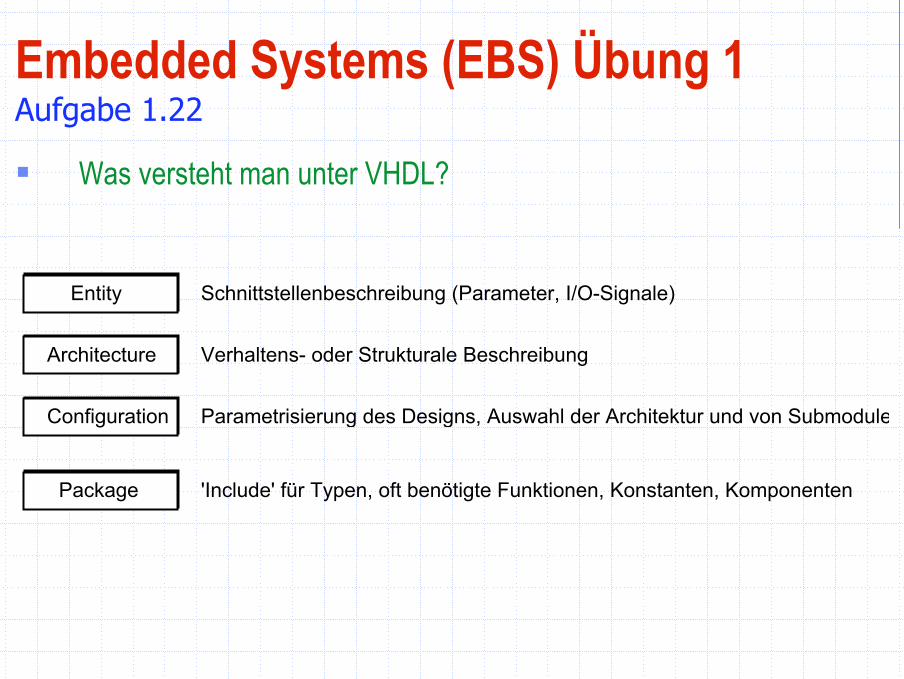
Was versteht man unter VHDL?
Entity
Architecture
Configuration
Package
Schnittstellenbeschreibung (Parameter, I/O-Signale)
Verhaltens- oder Strukturale Beschreibung
Parametrisierung des Designs, Auswahl der Architektur und von Submodule
'Include' für Typen, oft benötigte Funktionen, Konstanten, Komponenten
Embedded Systems (EBS) Übung 1Aufgabe 1.23
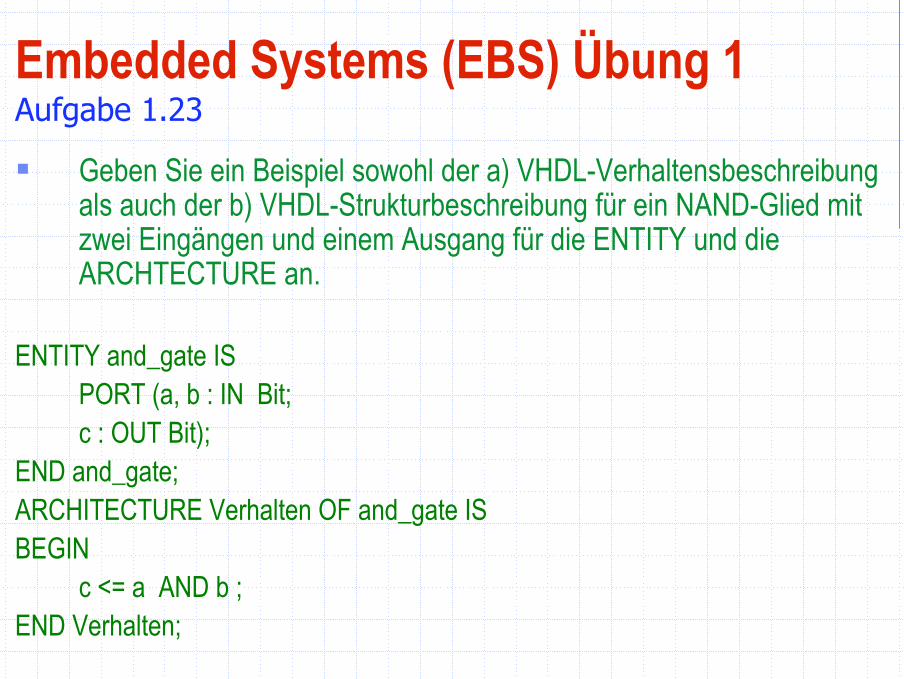
Geben Sie ein Beispiel sowohl der a) VHDL-Verhaltensbeschreibungals auch der b) VHDL-Strukturbeschreibung für ein NAND-Glied mit zwei Eingängen und einem Ausgang für die ENTITY und die ARCHTECTURE an.
ENTITY and_gate ISPORT (a, b : IN Bit;c : OUT Bit);
END and_gate;ARCHITECTURE Verhalten OF and_gate ISBEGIN
c <= a AND b ;END Verhalten;
Embedded Systems (EBS) Übung 1Aufgabe 1.23
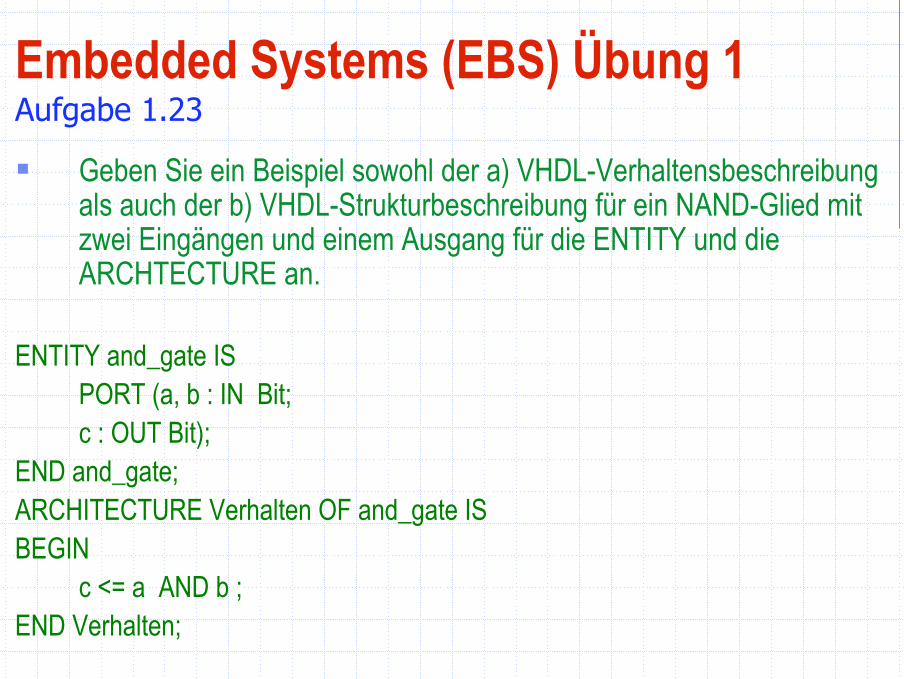
Geben Sie ein Beispiel sowohl der a) VHDL-Verhaltensbeschreibungals auch der b) VHDL-Strukturbeschreibung für ein NAND-Glied mit zwei Eingängen und einem Ausgang für die ENTITY und die ARCHTECTURE an.
ENTITY and_gate ISPORT (a, b : IN Bit;c : OUT Bit);
END and_gate;ARCHITECTURE Verhalten OF and_gate ISBEGIN
c <= a AND b ;END Verhalten;
Embedded Systems (EBS) Übung 1Aufgabe 1.24
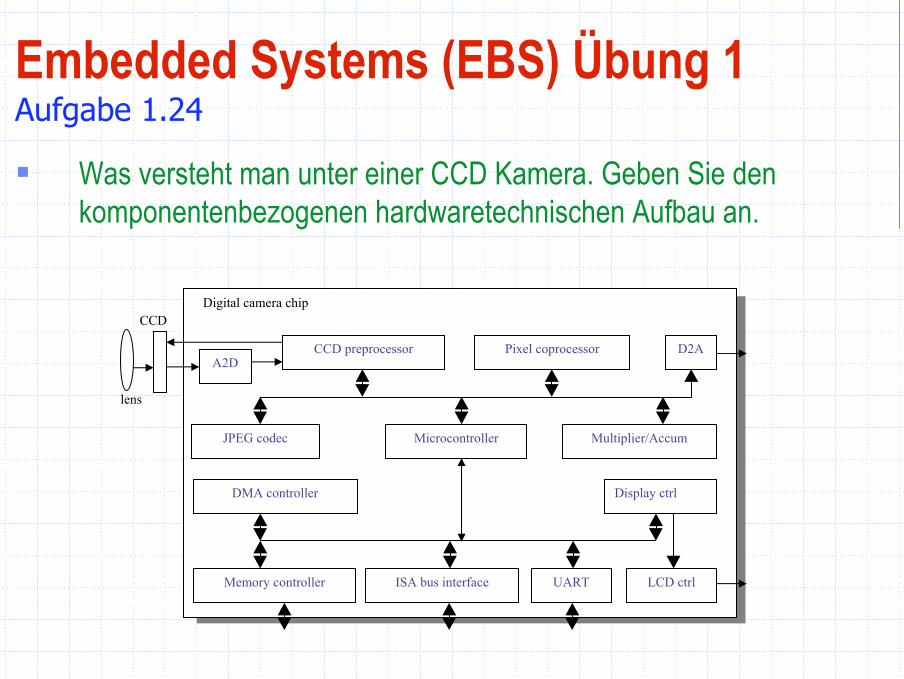
Was versteht man unter einer CCD Kamera. Geben Sie den komponentenbezogenen hardwaretechnischen Aufbau an.
Microcontroller
CCD preprocessor Pixel coprocessorA2D
D2A
JPEG codec
DMA controller
Memory controller ISA bus interface UART LCD ctrl
Display ctrl
Multiplier/Accum
Digital camera chip
lens
CCD
Embedded Systems (EBS) Übung 1Aufgabe 1.25
Was versteht man unter einem SPLD?
Simple PLD:beinhalten programmierbaren Block Logikblock 1. Ordnung ⇒ Ein- und Ausgänge als Anschlüsse nach außen geführt Ausgänge rückkoppelbarAnzahl der Standard-Gatterfunktionen beträgt 100 bis 500 über 20 bis 44 Anschlusspins belegbar Intern finden sich UND (AND), ODER (OR), NICHT-UND (NAND),
NICHT-ODER (NOR) Verknüpfungsglieder, als einheitliche Struktur Ausgänge häufig konfigurierbar ausgelegt, als Ausgangs Makrozellen
(Output Macro Cell). Beispiele für SPLD sind:PAL (PAL = Programmable Arrary Logic), GAL (GAL = Generic Array Logic),FPLA (Field Programmable Logic Array) Bausteine.
Embedded Systems (EBS) Übung 1Aufgabe 1.26
Was versteht man unter einem CPLD?
CPLD (CPLD = Complex Segmented Block Device):als interne Kopplung mehrerer SPLD (SPLD = Simple Programmable LogicDevice) betrachtet ⇒ enthalten Logikblöcke 2. Ordnung,besitzen eine Blockstruktur wie beispielsweise GALs, sind programmierbar, mit programmierbaren Verbindungen zwischen den Blöcken. Ausgänge der Blöcke nicht mehr als physikalische Anschlüsse verfügbarAnzahl der Gatterfunktionen liegt bei 500 bis 5000.
Beispiele für CPLD sind: MACH-Bausteine von Advanced Micro Devices (AMD), pLSI10xx- und ispLSI10xx-Familie von Lattice, MAX-Serie von Altera.
Embedded Systems (EBS) Übung 1Aufgabe 1.27
Was versteht man unter einem FPGA?
FPGA (FPGA = Field Programmable Gate Array): beinhalten Blockstruktur, aber viel feinere Granularität, in der Regelals einfache Gatter bzw. Register Struktur,zwischen Gattern sind dezentrale Verbindungen programmierbar, teilweise unterschiedliche Geschwindigkeit und Zuordnung, sog. shortlines bzw. longlines, Anschlusspins der Logikbausteine über spezielle I/O-Puffer heraus-geführt,flexibles FPGA Konzept ermöglicht Herstellung von weit über 100.000 Gatterfunktionen pro Baustein.
Beispiele für FPGA findet man in der Spartan FPFA-Familie von Xilinx. So kann beispielsweise mit dem FPGA-Baustein XCS30XL von Xilinx, einem Gatter-Baustein mit nur 30000 Gattern, ein PCI-Interface zum Preis von etwa 4 Euro realisiert werden.
Embedded Systems (EBS) Übung 1Aufgabe 1.28
Was versteht man unter einem Logikblock 1. Ordnung?
Programmierbarer logischer Block 1. Ordnungrepräsentiert innerhalb programmierbarer Logikbau-steine eine atomare Einheit,so programmierbar, dass Signale zu- bzw. abschaltbar sind,Zuteilung bzw. Wegnahme von Verknüpfungs- bzw. Verbindungsressourcen nicht möglich.
Embedded Systems (EBS) Übung 1Aufgabe 1.29
Was versteht man unter einem Logikblock 2. Ordnung?
Logikblöcke 2. und höherer Ordnung aus veränderlichen Verbindungs-ressourcen zwischen Logikblöcken niedrigerer Ordnung ableitbar.
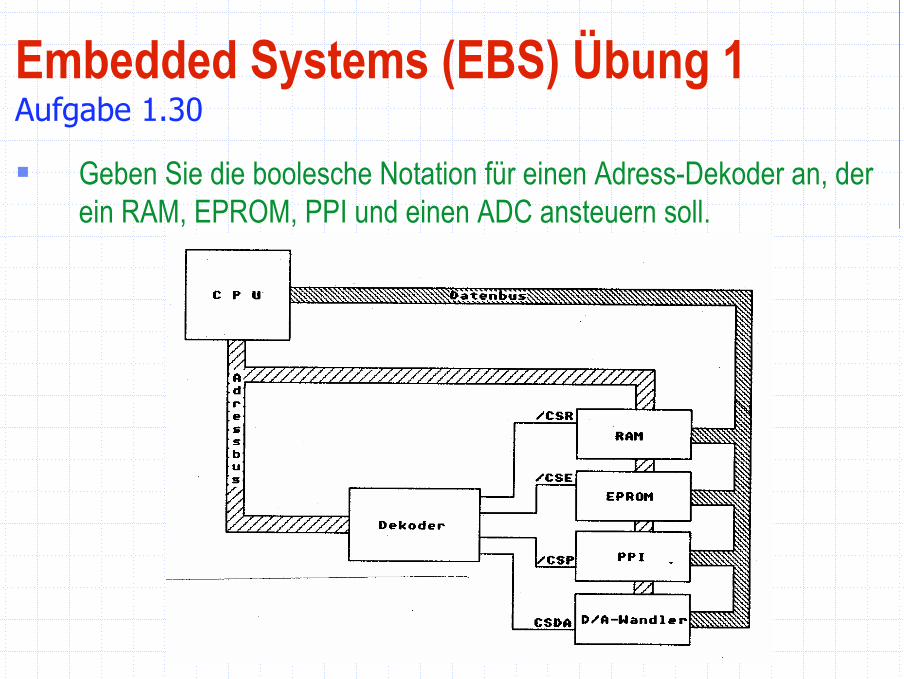
Embedded Systems (EBS) Übung 1Aufgabe 1.30
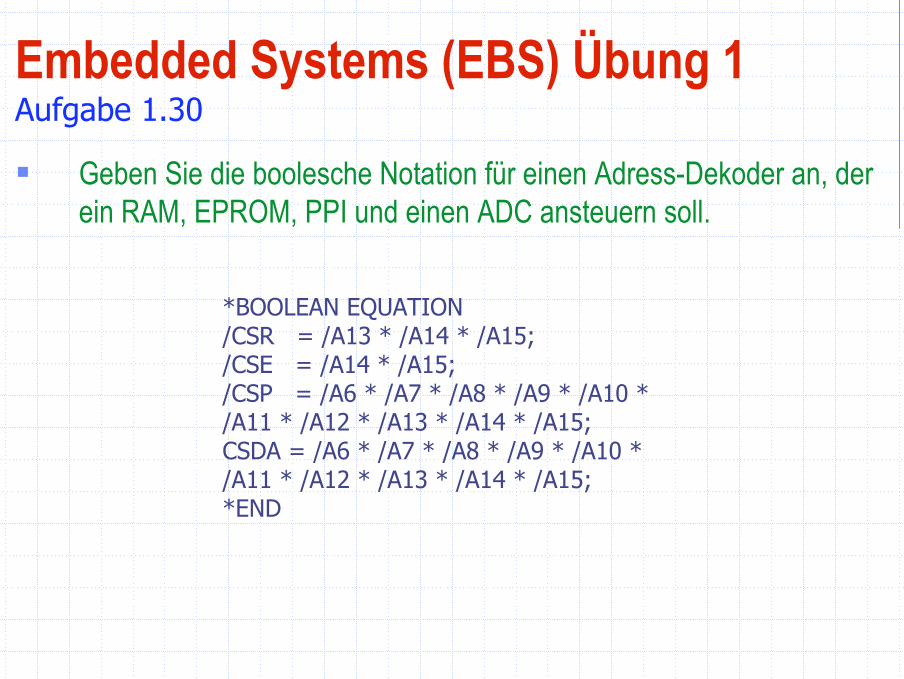
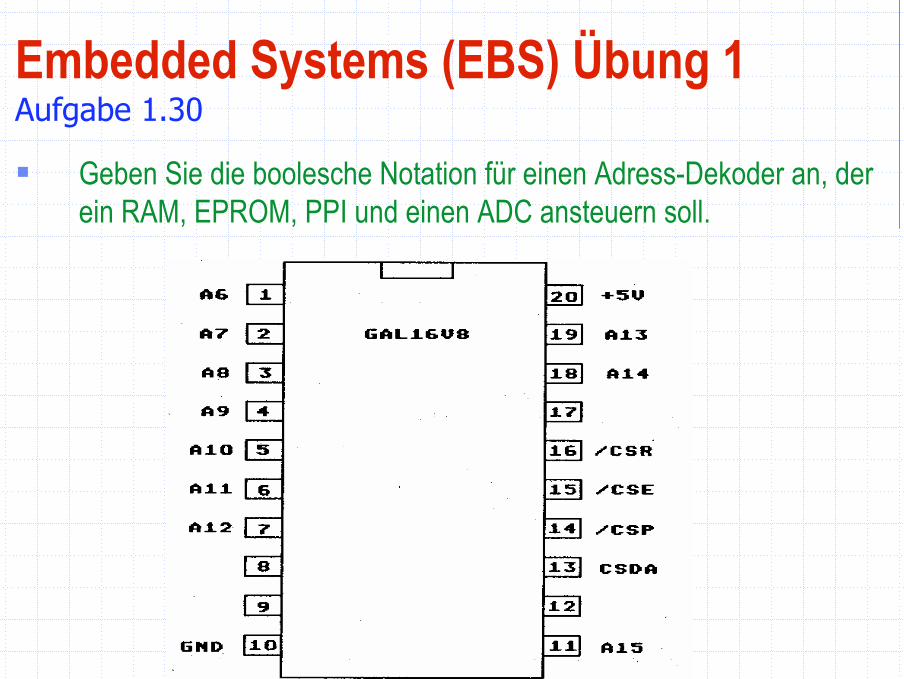
Geben Sie die boolesche Notation für einen Adress-Dekoder an, der ein RAM, EPROM, PPI und einen ADC ansteuern soll.
Embedded Systems (EBS) Übung 1Aufgabe 1.30
Geben Sie die boolesche Notation für einen Adress-Dekoder an, der ein RAM, EPROM, PPI und einen ADC ansteuern soll.
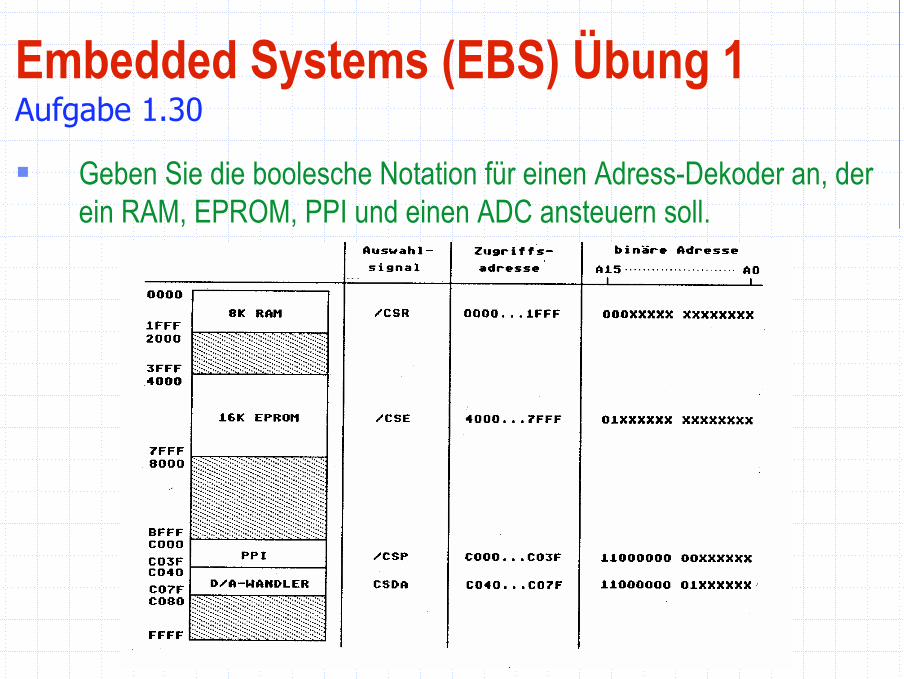
Embedded Systems (EBS) Übung 1Aufgabe 1.30
Geben Sie die boolesche Notation für einen Adress-Dekoder an, der ein RAM, EPROM, PPI und einen ADC ansteuern soll.
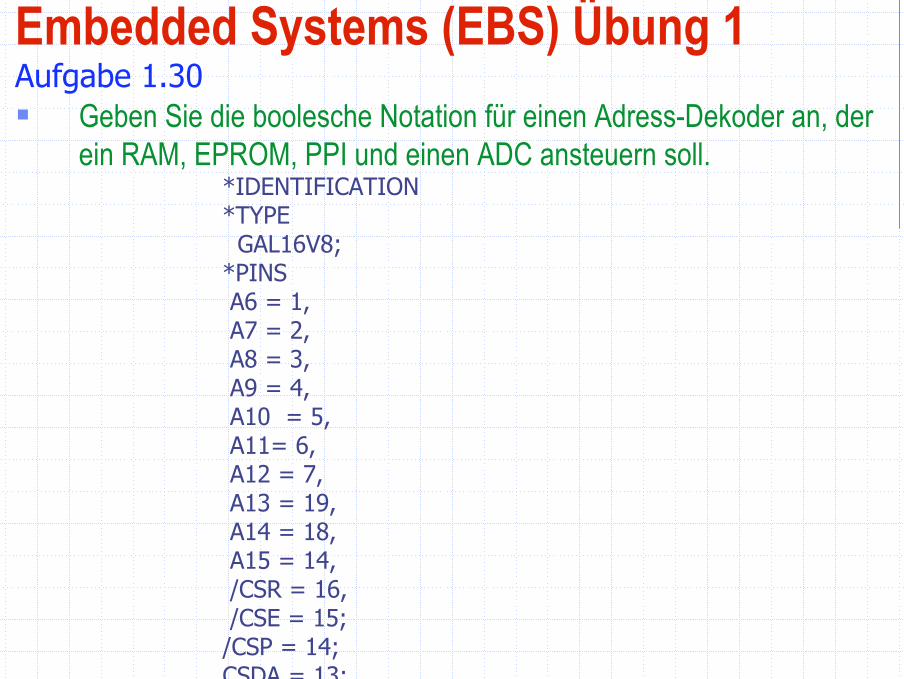
*IDENTIFICATION*TYPE
GAL16V8;*PINSA6 = 1,A7 = 2,A8 = 3,A9 = 4,A10 = 5, A11= 6,A12 = 7,A13 = 19,A14 = 18,A15 = 14,/CSR = 16,/CSE = 15;
/CSP = 14;CSDA = 13;
Embedded Systems (EBS) Übung 1Aufgabe 1.30
Geben Sie die boolesche Notation für einen Adress-Dekoder an, der ein RAM, EPROM, PPI und einen ADC ansteuern soll.
*BOOLEAN EQUATION/CSR = /A13 * /A14 * /A15;/CSE = /A14 * /A15;/CSP = /A6 * /A7 * /A8 * /A9 * /A10 * /A11 * /A12 * /A13 * /A14 * /A15; CSDA = /A6 * /A7 * /A8 * /A9 * /A10 * /A11 * /A12 * /A13 * /A14 * /A15;*END
Embedded Systems (EBS) Übung 1Aufgabe 1.30
Geben Sie die boolesche Notation für einen Adress-Dekoder an, der ein RAM, EPROM, PPI und einen ADC ansteuern soll.
Embedded Systems (EBS) Übung 1Aufgabe 1.31
Was versteht man unter Jedec Format?JEDEC-Format:
In diesem Format werden die Verbindungen der Logikmatrix des GAL durch Einsen und Nullen dargestellt. Anhand dieser Bits müssen die entsprechenden Bitmuster zur Programmierung erzeugt werden. Aus der Jedec-Datei geht damit hervor, welche Sicherungen in der Logikmatrix programmiert werden. Eine 1 bedeutete, dass die Sicherung an der betreffenden Stelle gelöscht wird, während bei einer 0 die Sicherung an der betreffenden Stelle intakt bleibt.Jedes einzelne Bit wird zusätzlich einer Fuse-Adresse zugeordnet.
Embedded Systems (EBS) Übung 1Aufgabe 1.31JEDEC-Format:Standard für Datenausgabe eines Assembler- oder Compilersystems, d.h. Aus-gabeformate Assembler-/Compilersystems einschließlich Fitter im JEDEC-Stan-dard genormt, um reibungslose Kommunikation zwischen Entwicklungssoftware und Programmiergerät zu gewährleisten.JEDEC-Standard beinhaltet drei wesentliche Teile:• binäres Ausgabeformat, vergleichbar mit Software-Compiler, beschreibt zu löschende bzw. setzende Sicherung anhand Nummernschemata
• logische und physikalische Angaben zum Test des programmierten Logikbausteins, wobei der Test in der Regel im Programmiergerätdurchgeführt wird,
• Formatangaben zur Kommunikation zwischen Entwicklungssystem undProgrammiergerät
Binärer Teil zur Programmierung in den Baustein, nur dann interpretierbar wenn der Bausteintyp bekannt bzw. ausgewählt ist. Device-Kennung für automatische Auswahl nicht verfügbar.
Embedded Systems (EBS) Übung 1Aufgabe 1.31
JEDEC-Format:⇒ JEDEC-Codeteile zum Test für Funktionssicherheit eines program-
mierten IC von Bedeutung, wobei Verifikation während des Program-miervorgangs lediglich den Vergleich zwischen programmierter und gelesener Fuse beinhaltet;
⇒ Zusammenhang zur physikalischen Funktion eines Ausgangspinsunter bestimmten Bedingungen muss gesondert getestet werden.
⇒Test: Eingangssignalkombinationen mit Soll Ausgängen verglichen. Hierzu werden vom Entwicklungssystem Testvektoren generiert, die im Programmiergerät für Soll/Ist-Vergleich beim Test genutzt werden.
⇒ JEDEC-Format Standard 3A umfasst die Angaben der Testvektorenund Zusätze wie Zugriffszeiten um Geschwindigkeiten einzubeziehen.
Embedded Systems (EBS) Übung 1Aufgabe 1.32
Was versteht man unter ispLSI?
Im System programmierbarer hochintegrierter Logikschaltkreis
Embedded Systems (EBS) Übung 1Aufgabe 1.33
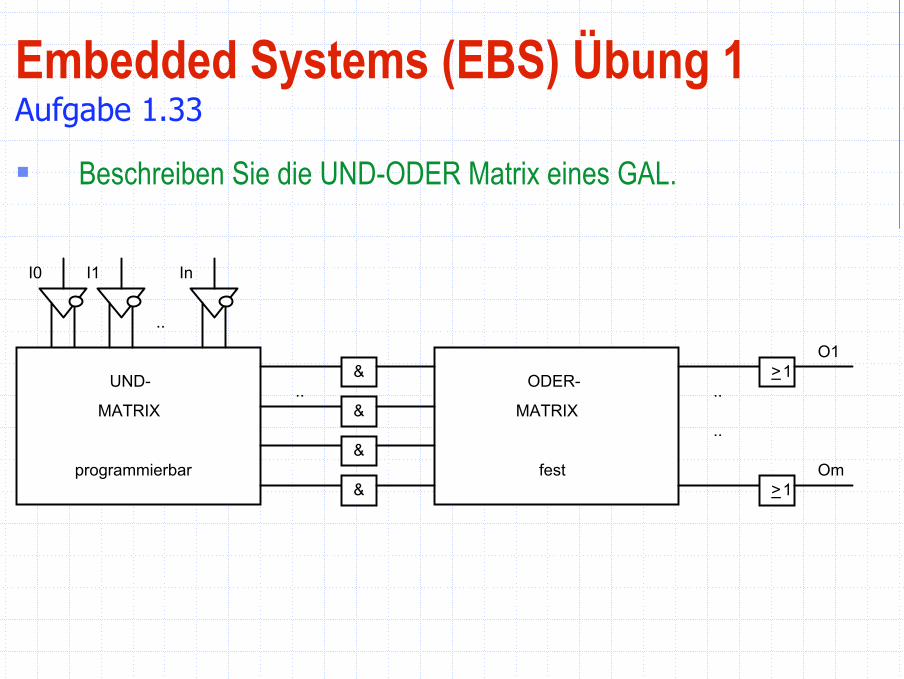
Beschreiben Sie die UND-ODER Matrix eines GAL.
&
&
&
&
UND-
MATRIX
programmierbar
..
..
I0 I1 In
ODER-
MATRIX
fest
>..
1
>1
O1
Om
..
Embedded Systems (EBS) Übung 1Aufgabe 1.34
Was versteht man unter Embedded Intelligence?
Intelligente ES• nehmen Umgebung über verschiedene sensorische Kanäle wahr,• agieren z.B. durch navigierende Bewegung, • wirken auf die Umgebung in die sie eingebettet sind ein,• kommunizieren mit anderen intelligenten Systemen innerhalb der komplexen
heterogenen System-Umgebung. Von Bedeutung für die sensorischen, aktorischen und kommunikations-bezogenen Prozesse intelligenter eingebetteter Systeme sind multi-modale Repräsentationen, d.h. das Zusammenwirken verschiedener Modalitäten wie z.B. Tasten, Greifen, Sehen, Hören, Sprechen, etc. Dies fußt auf intelligenten Systemen mit Sensorik-Aktorik- und Kommunikationsfähigkeiten.
Embedded Systems (EBS) Übung 1Aufgabe 1.35
Was versteht man unter Sensorfusion?
Ausreichend genaues und umfassendes geometrisches Abbild des gesamten Fahrzeugumfelds oder von Teilen davon Nutzbarkeit für die Anwendungen ACC, ANB, Pre-Crash, Lane-Change, Lane-Keeping, Blind-Spot-Warning, autonomes Fahren.Symbolische Interpretierbarkeit der erzeugten Umfeldrepräsen-tation bezüglich der vorliegenden Verkehrssituation.Nutzung unterschiedlicher Sensorik (Sichtfeld, Auflösung, Abtast-frequenz, extrahierbare Merkmale, Abstraktionsebene, Filter, Zuverlässigkeit)Komplementäre Fusion zur Erstellung eines umfassenden Abbilds.Kompetitive (redundante) Fusion zur Erhöhung der Genauigkeit.Robustheit gegenüber widersprüchlichen Sensordaten.Funktionalität - soweit möglich - bereits mit wenigen „schlechten“ Sensoren (modulare Struktur).
Embedded Systems (EBS) Übung 1Aufgabe 1.36
Was versteht man unter Softcomputing?
SoftcomputingNeuronale Netze
MLP (Multi-Layer-Perceptron) mit BackpropagationEtc.
Fuzzy Set Theorie
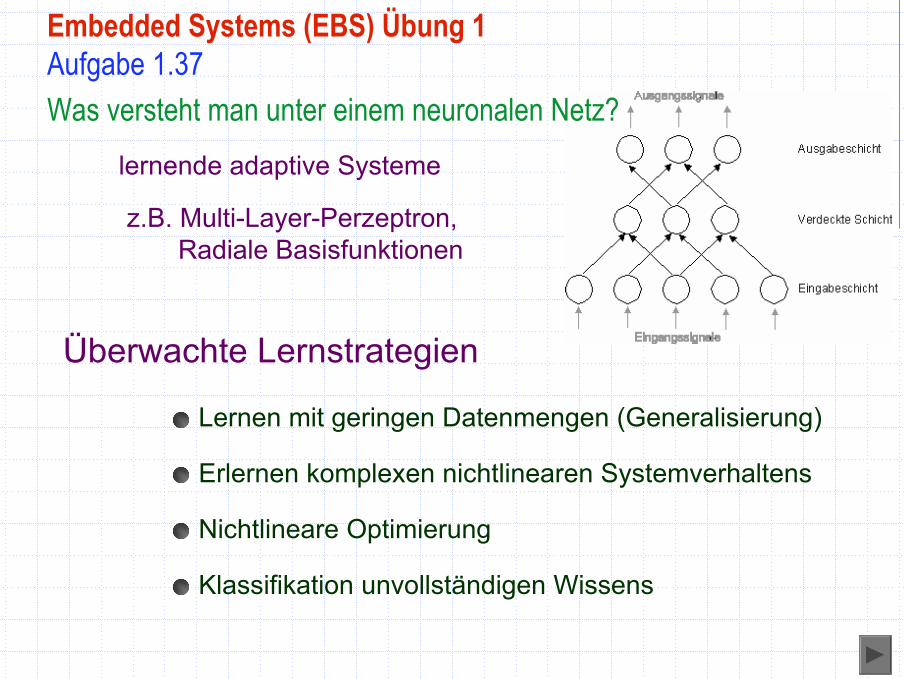
lernende adaptive Systeme
Überwachte Lernstrategien
Erlernen komplexen nichtlinearen Systemverhaltens
Nichtlineare Optimierung
Lernen mit geringen Datenmengen (Generalisierung)
Klassifikation unvollständigen Wissens
z.B. Multi-Layer-Perzeptron,Radiale Basisfunktionen
Embedded Systems (EBS) Übung 1Aufgabe 1.37Was versteht man unter einem neuronalen Netz?
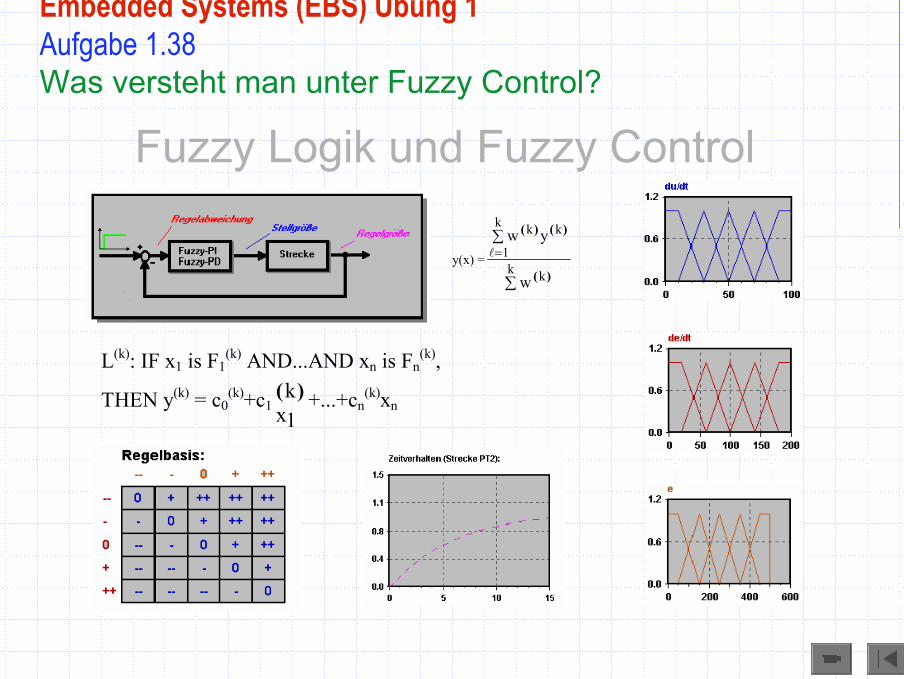
Fuzzy Logik und Fuzzy Control
L(k): IF x1 is F1(k) AND...AND xn is Fn
(k),
THEN y(k) = c0(k)+c1 x
k1( ) +...+cn
(k)xn
y(x) =
w y
w
k kk
kk
( ) ( )
( )
l=∑
∑
1
Embedded Systems (EBS) Übung 1Aufgabe 1.38Was versteht man unter Fuzzy Control?

















