Folie 1 Verkehrskonzepte der Zukunft Folie 1 Folie 1 Lehrstuhl Fahrzeugmechatronik Fakultät Verkehrswissenschaften Institut für Automobiltechnik Dresden - IAD Verkehrskonzepte der Zukunft Vortrag von Prof. Dr.-Ing. Bernard Bäker Technische Universität Dresden Institut für Automobiltechnik Dresden – IAD Institute of Automotive Mechatronics – IAM GmbH Neue elektrifizierte Antriebsarchitekturen 8. März 2010 - Nürnberg
Transcript
Folie 1Verkehrskonzepte der Zukunft Folie 1Folie 1
Lehrstuhl FahrzeugmechatronikFakultät Verkehrswissenschaften Institut für Automobiltechnik Dresden - IAD
Verkehrskonzepte der Zukunft
Vortrag vonProf. Dr.-Ing. Bernard Bäker
Technische Universität DresdenInstitut für Automobiltechnik Dresden – IAD
Institute of Automotive Mechatronics – IAM GmbH
Neue elektrifizierte Antriebsarchitekturen
8. März 2010 - Nürnberg
Verkehrskonzepte der Zukunft Folie 2Folie 2
Inhaltsverzeichnis
1.Einleitung und MotivationHerausforderung ElektromobilitätAnforderungslandschaft
2.Die Wahrheit über das ElektroautoHistorie - Fakten und Hintergründe – ChancenElektrochemieInfrastrukturen
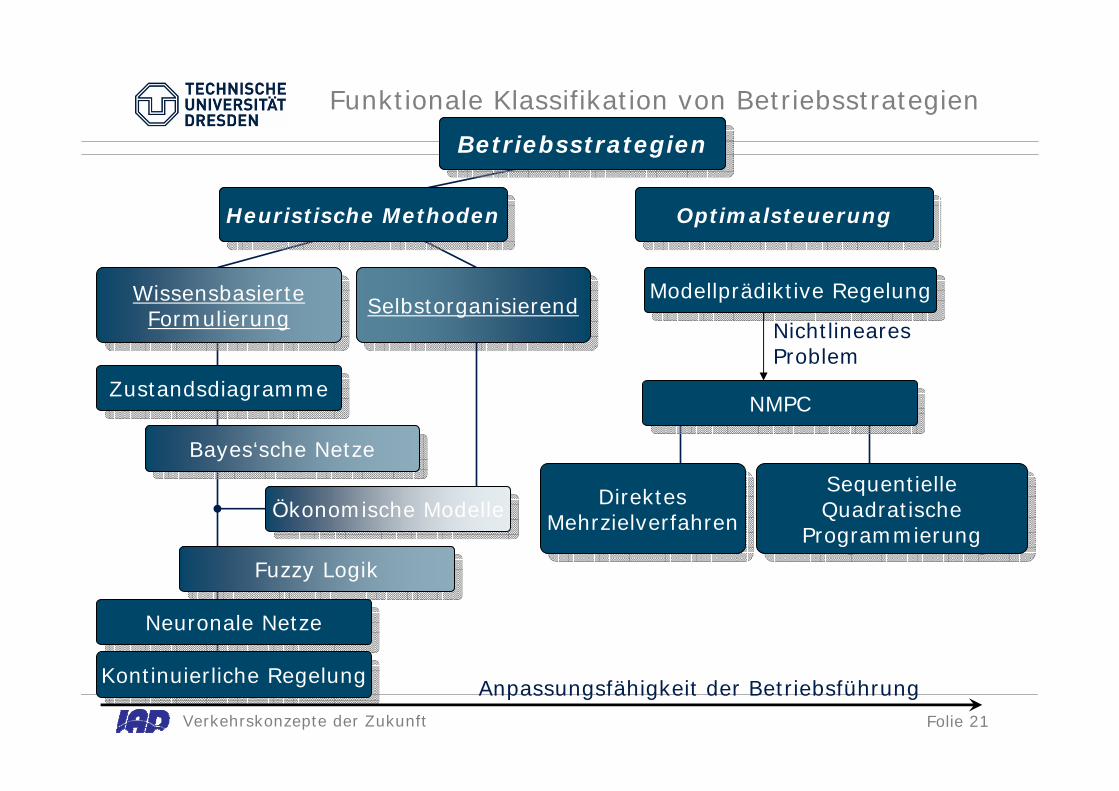
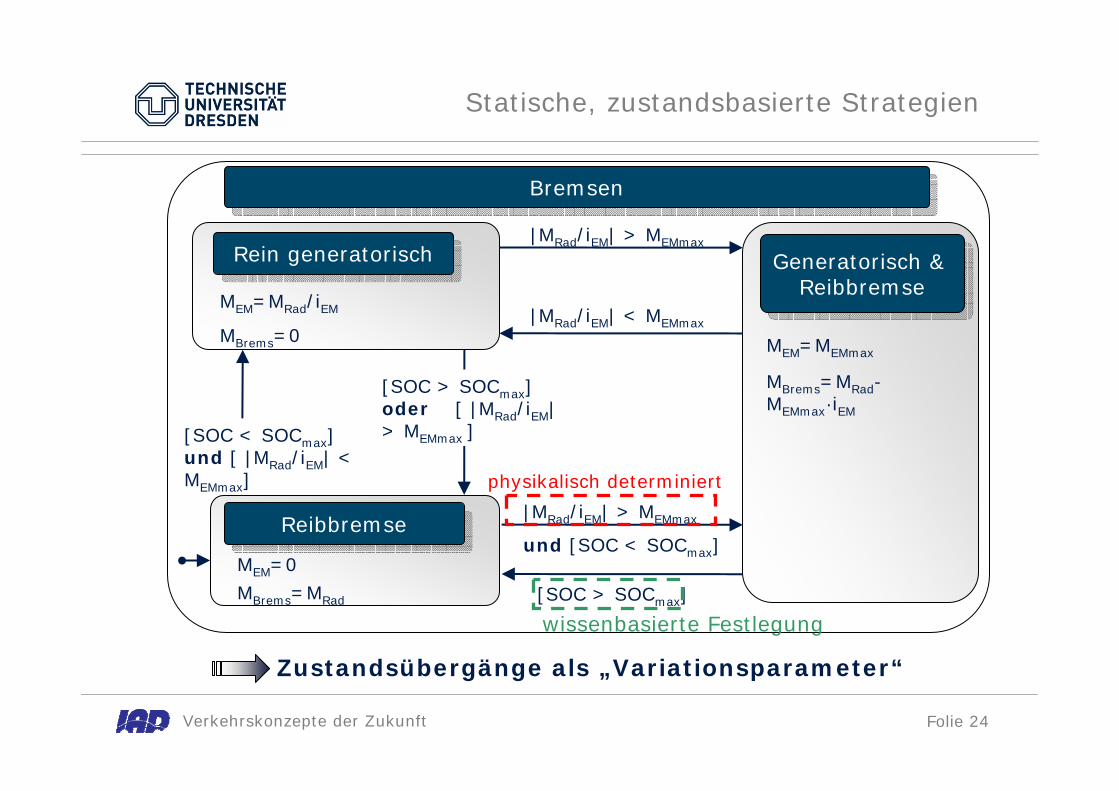
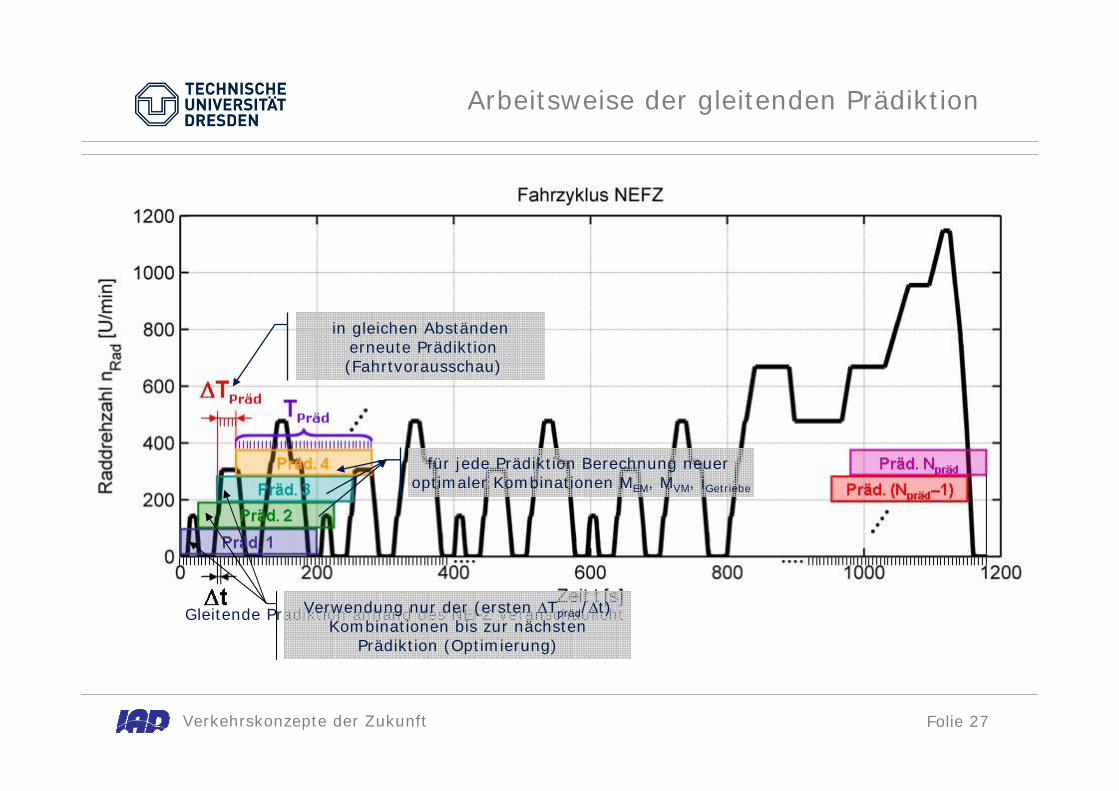
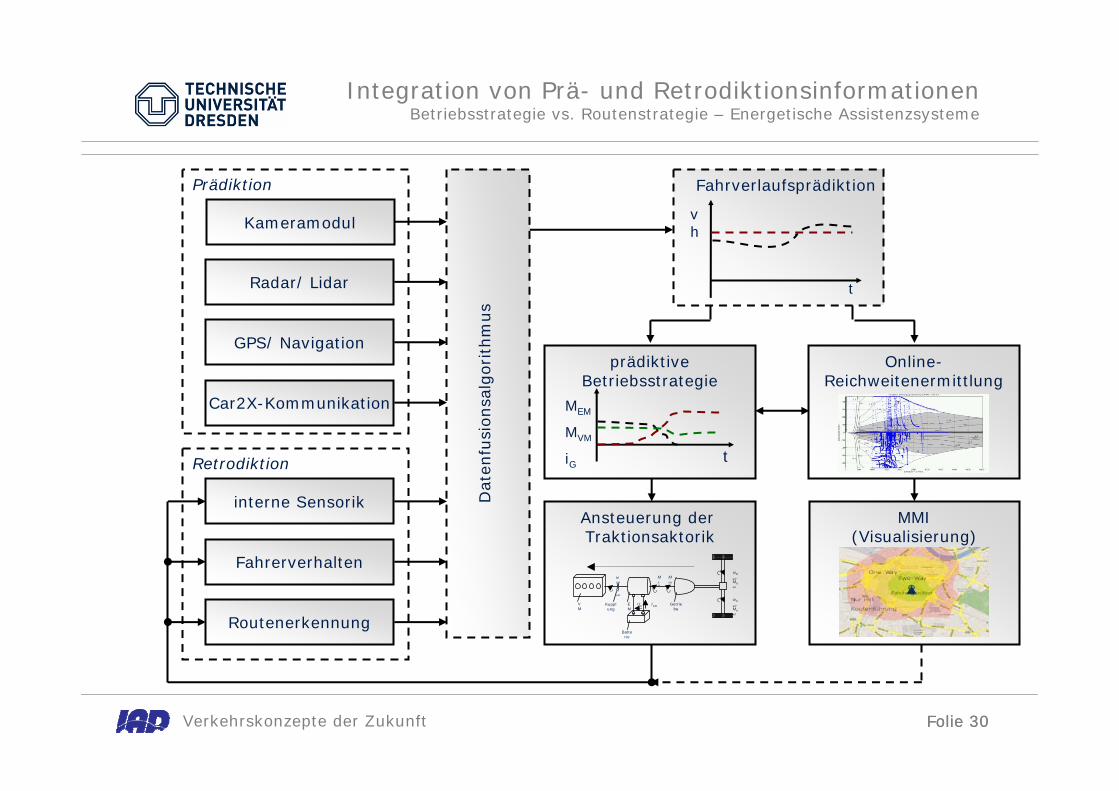
3.Elektrofahrzeuge der nächsten GenerationAbleitung der wirklich anstehenden AufgabenElektrische Speichersysteme und Neue FahrzeugarchitekturPrädiktive und retrodiktive BetriebsstrategienOptimierung eines Gesamtenergiemanagements
4.Zusammenfassung und Ausblick
Verkehrskonzepte der Zukunft Folie 3
Lohner-Porsche aus dem Jahre 1900•Erstes Elektrofahrzeug auf der Weltausstellung in Paris •Elektrischer Antrieb mit bis zu 7 PS an der Vorderachse•Energieversorgung durch 44-zelligen Bleiakku mit 80 Voltund Energie für ca. 3 Stunden•Die Höchstgeschwindigkeit: 58 km/h
• Erstmaliger Durchbruch der 100 km/h Geschwindigkeitsmarke:
• 29.4.1899 erreichte der Rennfahrer Camille Jenatzy mit dem Elektroauto «La Jamais contente» bereits 105,8 km/h
• Sie wurde von Elektromotoren angetrieben und wog 1450 kg.
• Es bedeutet übrigens "die niemals Zufriedene“, da sie angeblich keine Bremse eingebaut hatte. (elektromobil.com)
Einleitung und MotivationHerausforderung Elektromobilität
Folie 3
Verkehrskonzepte der Zukunft Folie 4Folie 4
Einleitung und EinleitungHistorie
Der EV-1 von GMBereits 1996 brachte General Motors den EV-1 heraus. Das Fahrzeug wurde lokal begrenzt als Leasingmodell in den USA eingeführt, inkl. einer vollständigen Infrastruktur mit zentralen Ladestationen.
Quelle: Medienberichte und Video, Autor: Chris Paine, Sony Pictures Classics,Erscheinungsjahr 2006.
Gewinnung von Lithium in Bolivien im größten Salzsee der Erde
Gewinnung von Lithium aus Salzen,in Bolivien, Salar de Uyuni.
Im Salzsee von Uyuni werden laut U.S. Geological Survey mit 5,4 Millionen Tonnen sehr große Vorkommen an Lithium vermutet. Da Lithium-Batterien aufgrund ihrer Energiedichte, hohen Zellspannung und einer geringen Selbstentladung in vielen elektronischen und elektrischen Geräten zum Einsatz kommen, ist das Element Lithium inzwischen ein wertvoller Rohstoff für die Automobilindustrie mit hohem Wachstumspotential.
Boliviens Präsident Evo Morales gab bereits 2007 das Projekt einer Pilotfabrik zur Lithium-Gewinnung aus dem Salar de Uyuniin Auftrag. Mit Dekret vom 1. April 2008 wurde der Industrialisierung der Ressourcen des Salars nationale Priorität eingeräumt und die staatlichen Bergbaugesellschaft COMIBOL bekam eine zusätzliche Abteilung für die Ausbeutung des Salzsees, mit einem Budget von 5,7 Mio. US-Dollar.
Der Bau der Pilotfabrik in Llipi Loma im Kanton Rio Grande begann im Mai 2008. Das Pilotprojekt umfasst auch die Entwicklung von Technologien zur Gewinnung von Lithiumkarbonat, da die Witterungsumstände und die Beschaffenheit der Salzlake des Salars bisherige Methoden nicht begünstigen.
Preisentwicklung von Lithium
Verkehrskonzepte der Zukunft Folie 11
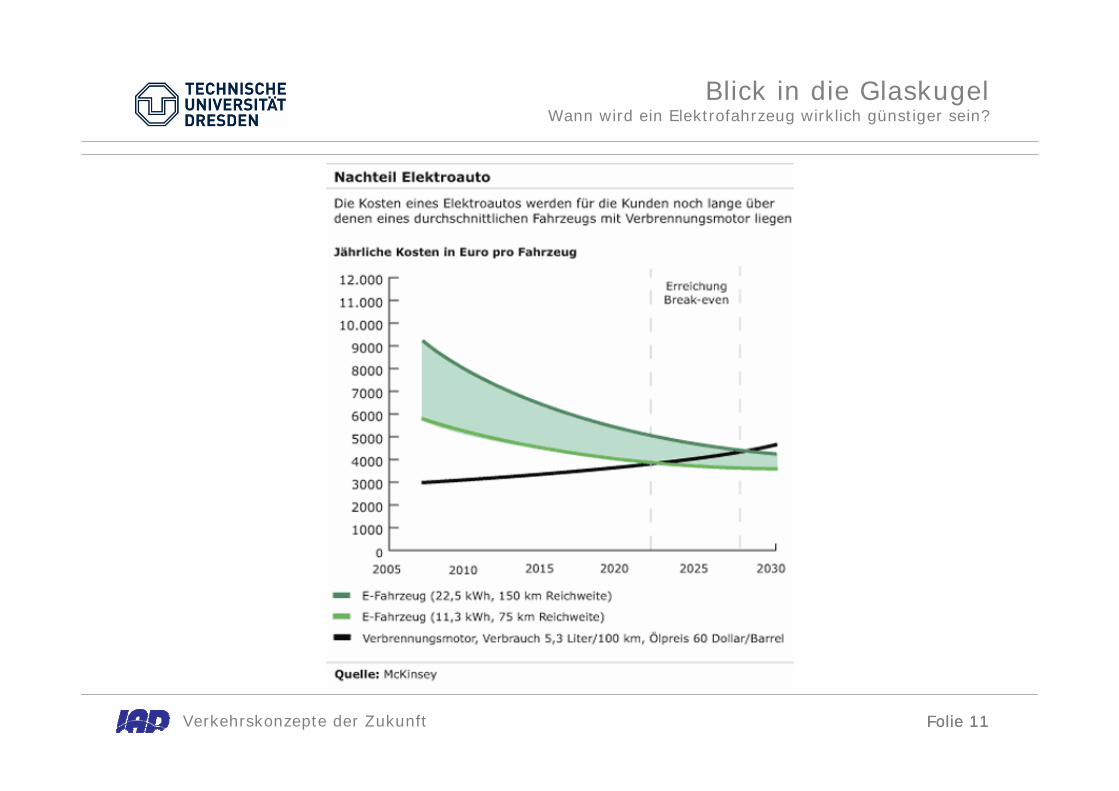
Blick in die GlaskugelWann wird ein Elektrofahrzeug wirklich günstiger sein?
Folie 11
Verkehrskonzepte der Zukunft Folie 12
Fazit und Lösungsszenarien
Fazit• Die Elektromobilität ist zunächst für urbane Regionen interessant• Ein lokales Energiemanagement reicht nicht aus• Es gibt Alternativen zu Hochvoltspannungslagen in Kfz-Bordnetzen• Der Hybridantrieb wird sich als Antriebsart im Kraftfahrzeug etablieren• Die Elektromobilität ist ein Infrastrukturthema• Statt einer Elektromobilitätsrevolution erfolgt eine Evolution in kleinen
Stufen
Lösungsszenarien für eine nachhaltige,massentaugliche Elektromobilität:• Energieeffizientes Gesamtfahrzeugmanagement• Prädiktive Betriebsstrategie und Fahrtroutenplanung• Alternative Batterie- und Antriebskonzepte• Entwurf einer übergreifenden Bewertungsmetrik zur frühzeitigen
Potenzialabschätzung
Folie 12
Verkehrskonzepte der Zukunft Folie 13Folie 13Folie 13
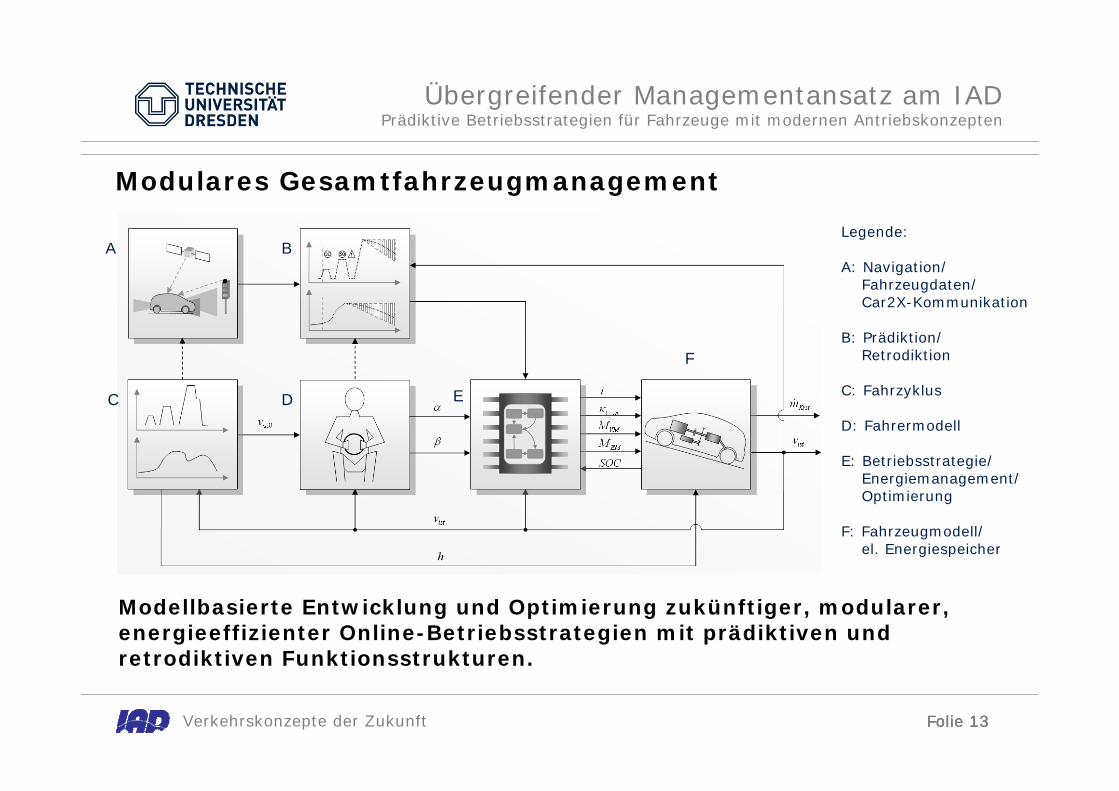
Modulares Gesamtfahrzeugmanagement
Modellbasierte Entwicklung und Optimierung zukünftiger, modularer, energieeffizienter Online-Betriebsstrategien mit prädiktiven und retrodiktiven Funktionsstrukturen.
Übergreifender Managementansatz am IADPrädiktive Betriebsstrategien für Fahrzeuge mit modernen Antriebskonzepten
- Battery-Packaging als skalierbarer Ansatz (n-16 Volt-Module)
- Entwurf auf Basis von Li-Tec High-Energy Li-Ionen-Zellen (4x40Ah)
- Langzeittest und Verifikation mithilfe zugehörigem Hybrid-Powernet-Prüfstand (Zertifizierung und Qualitätsabsicherung)
Forschungsvorhaben Elektro-Speicher der ZukunftEntwicklung eines Prototyps mit Li-Ionen-Technologie
Verkehrskonzepte der Zukunft Folie 33
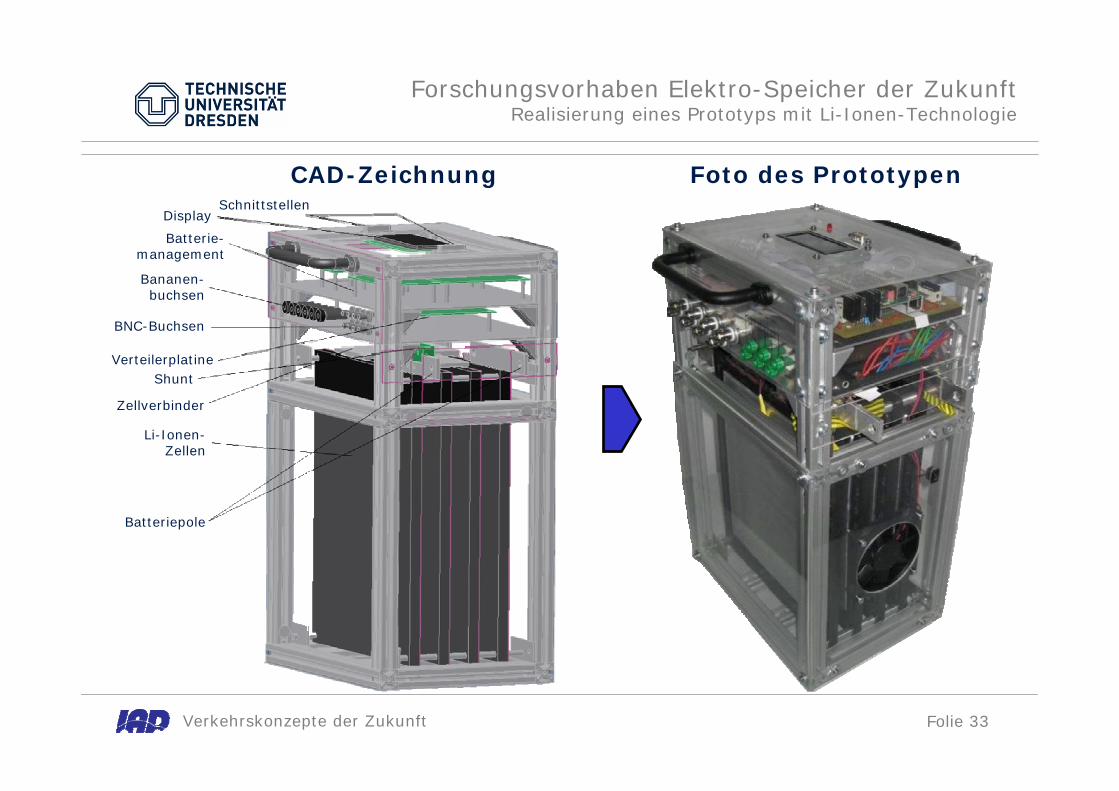
Forschungsvorhaben Elektro-Speicher der ZukunftRealisierung eines Prototyps mit Li-Ionen-Technologie
SchnittstellenDisplay
Batterie-management
Bananen-buchsen
BNC-Buchsen
VerteilerplatineShunt
Zellverbinder
Li-Ionen-Zellen
Batteriepole
CAD-Zeichnung Foto des Prototypen
Verkehrskonzepte der Zukunft Folie 34
Building Vehicle
PhotovoltaicSystem
Wind Energy
PressureAccumulator
Electr. StorageSystem
Advanced Battery
Multi‐valentEnergy Management
Internal combustion engine
GeneratorElectr. Storage
SystemAdvanced Battery
Battery Management
In‐house consumer devices Vehicle traction energy
Docking StationPowerPlug
Quel
le:
Bew
illig
tes
Förd
erpro
jekt
Land S
achse
n,
Sta
rt:
01.0
4.2
010,
Tei
lneh
mer
:EA E
ner
gie
Arc
hitek
tur
Gm
bH
, D
resd
enIn
st.
für
Auto
mobilt
ecnik
–IA
D,
Dre
sden
Folie 34
Forschungsprojekt des Landes SachsenWohnen und Mobilität
Elektrofahrzeug / Fahrzeug mit Elektrotraktion
Smart PowerGrid
Verkehrskonzepte der Zukunft Folie 35Folie 35
Preisverleihungen I/II
Auszeichnung eines gemeinsamen Konzepts der EA, des IAD und der Eisenbahnerwohnungs-genossenschaft Dresden (EWG) zur energetischen Sanierung der „Urbanen Mitte“ des Stadtteiles Dresden Gorbitz durch den Bundesminister für Verkehr, Bau und Stadtentwicklung, Herrn Tiefensee. Teilgenommen hat die EWG am vom Bundesminister für Verkehr, Bau und Stadtentwicklung ausgeschriebenen Wettbewerb „Energetische Sanierung von Großwohnsiedlungen“.
Entgegengenommen hat den Preis Dr. Hesse, hier mit Frau Dr. Mikoleit und Herr Dr. Zweinert (s. Foto).
1. Platz im Wettbewerb„Wohnen und Mobilität mit regenerativer Energie“am 15. Juli 2009
Projektantrag in Zusammenarbeit mit der EA EnergieArchitektur GmbH – Dresden erstellt.
Verkehrskonzepte der Zukunft Folie 36
Preisverleihungen II/II
Mit dem Preis, auch „Kongress-Oscar" genannt, werden Professoren geehrt, die herausragende Kongresse bzw. Tagungen in die Stadt geholt haben. Diese Ehrung wird in vier Kategorien vergeben, die sich nach der Teilnehmerzahl der organisierten Kongresse richten. Die Auswahl der Preisträger erfolgt anhand von festgelegten Bewertungskriterien durch eine hochkarätige Jury. So spielen die Anzahl der gebuchten Übernachtungen und die Organisation des Rahmenprogramms eine wichtige Rolle. Zusätzlich ist entscheidend, inwieweit der Kongress eine nationale, europäische oder außereuropäische Veranstaltung ist und ob diese gezielt nach Dresden geholt worden ist.
Preisträger in Kategorie 1: bis 200 Teilnehmer Herr Prof. Dr.-Ing. Bernard Bäker vom Institut für Automobiltechnik der TU Dresden wurde in der Kategorie für Veranstaltungen bis 200 Kongressteilnehmer, für die 40 Bewerbungen eingingen, ausgewählt.
1. Platz Congress Award Dresdenfür Prof. Bäker zur Ausrichtung der29. Tagung „Elektronik im Kraftfahrzeug – u.a. Elektromobilität“am 16. und 17. Juni 2009 in Dresden
Überreicht durch das Oberbürgermeisteramt unddem Stadtmarketing der Stadt Dresden am 12. November 2009,v.l.: Frau Dr. Böning, Prof. Bäker
Verkehrskonzepte der Zukunft Folie 37
Zusammenfassung
Folie 37
• Darstellung von Ausbaustufen einer Elektromobilität der Zukunft.
• Vorstellung eines elektrifizierten Fahrzeugantriebs mitvorausschauender Steuerung sowie neuartiger el. Energiespeicherzzgl. einer veränderten Energieinfrastruktur mit dezentralen,regenerativer Energieerzeugung.
• Keine eindeutige Lösung einer Elektromobilität der Zukunft, mobileZukunft wird geprägt sein von verschiedensten Mobilitätskonzepten,es werden sich gesellschaftliche Veränderungen einstellen.
• Notwendig wird ein übergreifendes nationales und ggf. globalesEnergiemanagement.
• Bewertungssystem zur Elektromobilität notwendig, mehr Transparenzwann und für welche Anwendung welche Art von Elektromobilität ameffizientesten ist, welche Rahmenbedingungen erfüllt sein müssen,Massentauglichkeit und Nachhaltigkeit essentiell.
Verkehrskonzepte der Zukunft Folie 38
Tagungshinweise
Folie 38
Aktuelle Tagungen in 2010
4. Tagung
„Diagnose in mechatronischen Fahrzeugsystemen“ in DresdenNeue Verfahren für Test, Prüfung und Diagnose von E/E-Systemen im Kfz3. und 4. Mai 2010, IAD-Tagung, Lehrstuhl Fahrzeugmechatronik
30. Tagung – Jubiläumstagung
„Elektronik im Kraftfahrzeug“ in DresdenElektromobilität – Energiebordnetz – E/E-Architektur der Zukunft16. und 17. Juni 2010, Haus der Technik Tagung, Steigenberger Hotel Dresden
Verkehrskonzepte der Zukunft Folie 39
BAB 17Dresden-Südvorstadt
Kontaktdaten des Lehrstuhls
Prof. Dr.-Ing. Bernard BäkerTechnische Universität DresdenFakultät für VerkehrswissenschaftenInstitut für Automobiltechnik (IAD)Lehrstuhl für Fahrzeugmechatronik