Page 1
D I P L O M A R B E I T
Master’s Thesis
KONSTITUTIVES MODELLIEREN VON FICHTENHOLZ
UNTER BIAXIALER BEANSPRUCHUNG MITTELS EINES
ORTHOTROPEN EINFLACHENMODELLS UNTER
BERUCKSICHTIGUNG VON VER- UND ENTFESTIGUNG
ausgefuhrt zum Zwecke der Erlangung des akademischen Grades eines Diplom-Ingenieurs
am
Institut fur Festigkeitslehre
der
Technischen Universitat Wien
unter Anleitung von
Dipl.-Ing. Dr.techn. Peter Mackenzie-Helnwein
und
ao.Univ.-Prof. Dipl.-Ing. Dr.techn. Josef Eberhardsteiner
durch
Herbert Wolfgang MULLNER
E 611 / 98 25 132
Karchergasse 3-13/5/3
A-1030 Wien
Wien, im Juni 2003
Page 2
Danksagung
Mit dieser Diplomarbeit beende ich nach fast funfjahriger Studienzeit meine akademische
Ausbildung an der Technischen Universitat Wien. Um dieses Ziel zu erreichen bedarf es der
Unterstutzung von Verwandten, Freunden und Universitatsangehorigen. Mit diesen Zeilen
mochte ich mich bei all jenen bedanken, die daran beteiligt waren.
Mein besonderer Dank gilt meiner Mutter, die mir dieses Studium ermoglicht hat und mich
all die Jahre unterstutzt hat. Sie munterte mich immer wieder auf, wenn das Gelingen dieser
Arbeit in weite Ferne geruckt schien.
Fur die ausgezeichnete universitare Betreuung mochte ich mich bei den Herrn Dipl.-Ing.
Dr.techn. Peter Mackenzie-Helnwein und ao.Univ.-Prof. Dipl.-Ing. Dr.techn. Josef Eber-
hardsteiner bedanken. Beide zeigten großes Interesse an meiner Arbeit. Trotz des Aus-
landsaufenthalts von Herrn Mackenzie-Helnwein gewahrte er mir eine das ubliche Ausmaß
ubersteigende Unterstutzung. Mit allen mechanischen Problemen konnte ich mich jederzeit
an ihn wenden.
Ein herzlicher Dank gilt dem Vorstand des Instituts fur Festigkeitslehre, o. Univ.-Prof. Dipl.-
Ing. Dr.techn. Dr.h.c. Herbert A. Mang, Ph.D. Das Wissen, das ich in seinen Vorlesungen
vermittelt bekommen habe, war Grundvoraussetzung zur Bearbeitung der Diplomarbeit.
Bei Herrn ao.Univ.-Prof. Dipl.-Ing. Dr.techn. Josef Eberhardsteiner mochte ich mich bei
der individuellen Festlegung des Diplomarbeitsthemas bzw. des Umfangs der Diplomarbeit
bedanken. Er stellte mir einen Computerarbeitsplatz und die erforderliche Software, die zur
Bearbeitung der Diplomarbeit notwendig war, zur Verfugung.
Weiterer Dank gebuhrt den Assistenten des Instituts, die immer fur ein Gesprach Zeit und
Geduld hatten, allen voran Herrn Univ.-Ass. Dipl.-Ing. Martin Fleischmann. Er stand mir
nicht nur mit Rat, sondern auch mit der notigen Tat zum richtigen Zeitpunkt bei.
Wien, im Juni 2003 Herbert W. MULLNER
Page 3
Abstract of the Master’s Thesis
Constitutive Modelling of Clear Spruce Wood underBiaxial Loading by means of an Orthotropic Single-Surface Model
under Consideration of Hardening and Softening Mechanisms
The goal of this thesis is the development of a plane stress orthotropic material model for
clear spruce wood. Such a model has to consider an initially linear elastic domain as well as
hardening and softening behaviour at higher states of stress or strain, respectively.
The underlying basis of this work is an experimental investigation of the failure envelope
for biaxial stressed wood by Eberhardsteiner et al. They described the failure envelope by
means of the orthotropic elliptic failure criterion by Tsai and Wu. This criterion identifies
failure states as a boundary of a linear elastic domain. No post-failure modes were identified.
However, the idea of a single-surface model has been adopted within this work. This offers a
reasonably simple mathematical description of an orthotropic yield surface by means of just
six independent material parameters.
Typically, single-surface models are solely phenomenological and do not permit the iden-
tification of distinct micromechanical failure modes. This problem has been overcome by
Mackenzie-Helnwein et al. by means of a micromechanically based multi-surface model. This
model identifies four micromechanical failure modes and introduces one strain hardening or
strain softening model for each of them. The disadvantage of such a model is the extremely
large number of required material parameters.
Combining the advantage of a smooth single-surface model with the identification of distinct
hardening and softening laws of the multi-surface model is the key to the novel mathematical
formulation presented in this work. By associating characteristic strength values of the single-
surface model with the respective characteristic failure modes of the multi-surface model,
one can define a set of nonlinear evolution laws for the six parameters of the criterion of
Tsai and Wu. Such a modification redefines the meaning of the original failure envelope as a
yield surface. Depending on the stress state, plastic loading causes hardening and softening,
respectively. This is represented by changing size and location of the elliptic yield surface in
the orthotropic stress space.
The resulting model is represented by a coupled system of nonlinear first-order time diffe-
rential equations. Their solution requires a numerical time integration algorithm. For this
purpose the return map algorithm has been adopted. It leads to a system of nonlinear alge-
braic equations, which has to be solved by means of the Newton-Raphson iterative scheme.
Its computational costs can be minimized by means of a partitioned solution strategy. The
consistent tangent for the presented algorithm is given as a closed form expression.
The verification of the developed model is given for the entire plane stress orthotropic stress
space by means of back-calculation of the biaxial experiments by Eberhardsteiner. The
performed simulations of these experiments show good agreement between the model and
the tests for most modes of biaxial loading. Minor deviations are a consequence of restricting
the yield condition to an elliptical surface. However, the obtained results are superior to any
method suggested by design codes.
Page 4
Inhaltsverzeichnis
1 Einfuhrung 11.1 Aufgabenstellung und Losungsstrategie . . . . . . . . . . . . . . . . . . . . . 11.2 Gliederung der Arbeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Experimentelle Untersuchungen von Fichtenholz 32.1 Beschreibung der Versuchseinrichtung . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Verwendetes Versuchskonzept . . . . . . . . . . . . . . . . . . . . . . 32.1.2 Beschreibung des Probekorpers . . . . . . . . . . . . . . . . . . . . . 52.1.3 Mechanische Versuchsparameter . . . . . . . . . . . . . . . . . . . . . 72.1.4 Biaxiales Belastungssystem . . . . . . . . . . . . . . . . . . . . . . . 82.1.5 Dreidimensionale Deformationsanalyse . . . . . . . . . . . . . . . . . 10
2.2 Grundlagen der Versuchsauswertung . . . . . . . . . . . . . . . . . . . . . . 112.3 Uniaxiale Zugversuche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.4 Analyse der biaxialen Bruchversuche . . . . . . . . . . . . . . . . . . . . . . 142.5 Grundlagen zur Simulation der biaxialen Bruchversuche . . . . . . . . . . . . 15
2.5.1 Bestimmung des initialen Verzerrungszustandes . . . . . . . . . . . . 152.5.2 Veranschaulichung der vier Versagensmechanismen . . . . . . . . . . 16
3 Beschreibung des elastischen Bereiches 183.1 Ausgangszustand und Problemstellung . . . . . . . . . . . . . . . . . . . . . 183.2 Beispiel zur Ermittlung der Materialparameter . . . . . . . . . . . . . . . . . 203.3 Varianten zur Berechnung der Materialparameter . . . . . . . . . . . . . . . 22
3.3.1 Verwendung von einer linearen Regressionsgleichung . . . . . . . . . . 233.3.2 Verwendung von zwei linearen Regressionsgleichungen . . . . . . . . . 263.3.3 Verwendung von allen linearen Regressionsgleichungen . . . . . . . . 28
3.4 Schlussfolgerungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
4 Theoretische Grundlagen zur Modellbildung 304.1 Einaxiale Uberlegungen zur Beschreibung des plastischen Verhaltens . . . . . 30
4.1.1 Grundgleichungen der Plastizitatstheorie . . . . . . . . . . . . . . . . 304.1.2 Ermittlung des Konsistenzparameters . . . . . . . . . . . . . . . . . . 334.1.3 Diskretisierte Form der Grundgleichungen . . . . . . . . . . . . . . . 364.1.4 Losungsalgorithmus fur das Projektionsverfahren . . . . . . . . . . . 374.1.5 Einfache Beispiele zur Illustration der Vorgangsweise . . . . . . . . . 39
4.2 Bruchumhullende nach Tsai und Wu . . . . . . . . . . . . . . . . . . . . . . 484.2.1 Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 484.2.2 Kurvendiskussion des Hauptschnitts des Ellipsoids . . . . . . . . . . . 52
Page 5
INHALTSVERZEICHNIS II
4.2.3 Evolutionsgesetze fur charakteristische Festigkeiten fur die vier Versa-gensmechanismen nach Mackenzie-Helnwein et al. . . . . . . . . . . . 61
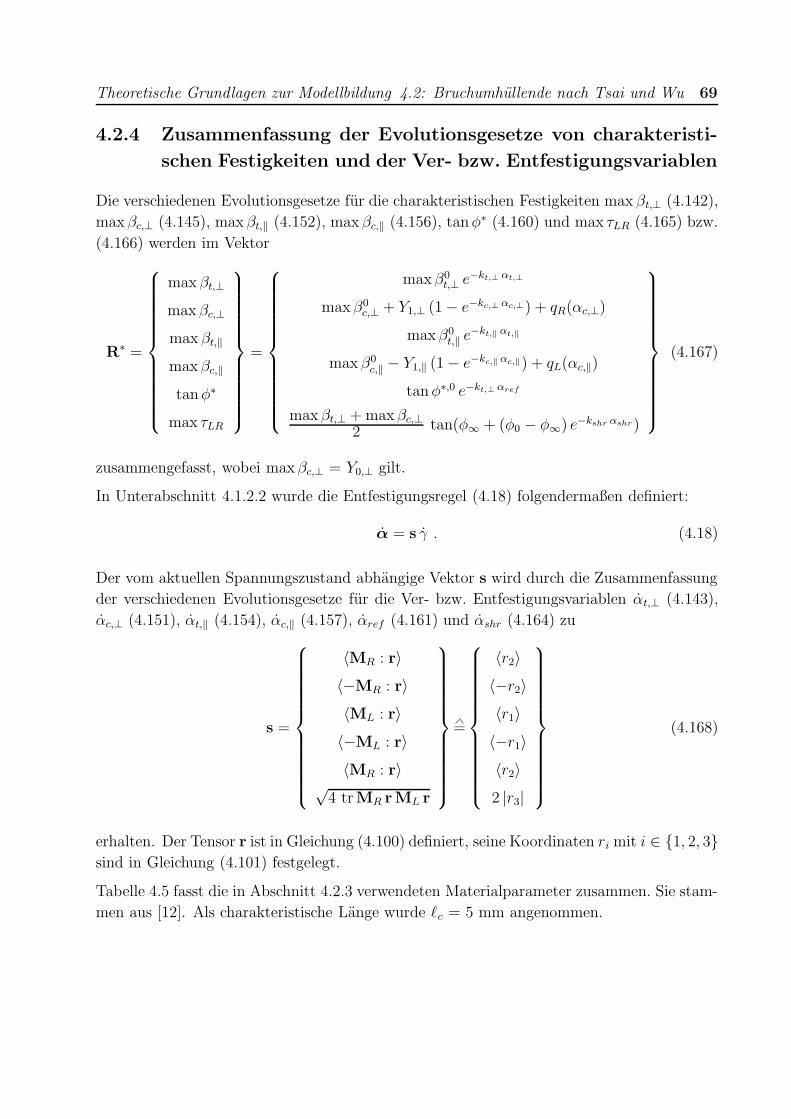
4.2.4 Zusammenfassung der Evolutionsgesetze von charakteristischen Fes-tigkeiten und der Ver- bzw. Entfestigungsvariablen . . . . . . . . . . 69
4.2.5 Uberlegungen zur Festlegung der charakteristischen Lange . . . . . . 704.2.6 Aktualisierung der Parameterwerte p bei kombinierter Ver- bzw. Ent-
festigung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
5 Algorithmische Behandlung des elasto-plastischen Materialmodells 755.1 Zusammenstellung der numerischen Integrationsgleichungen . . . . . . . . . 755.2 Formulierung des Newton-Raphson-Verfahrens . . . . . . . . . . . . . . . . . 775.3 Zerlegung des Tangentenoperators DR
(k)n+1 in DRj . . . . . . . . . . . . . . . 79
5.4 Berechnung des Zuwachses ∆qn+1 . . . . . . . . . . . . . . . . . . . . . . . . 825.5 Berechnung der konsistenten algorithmischen Tangente C
epn+1 . . . . . . . . . 85
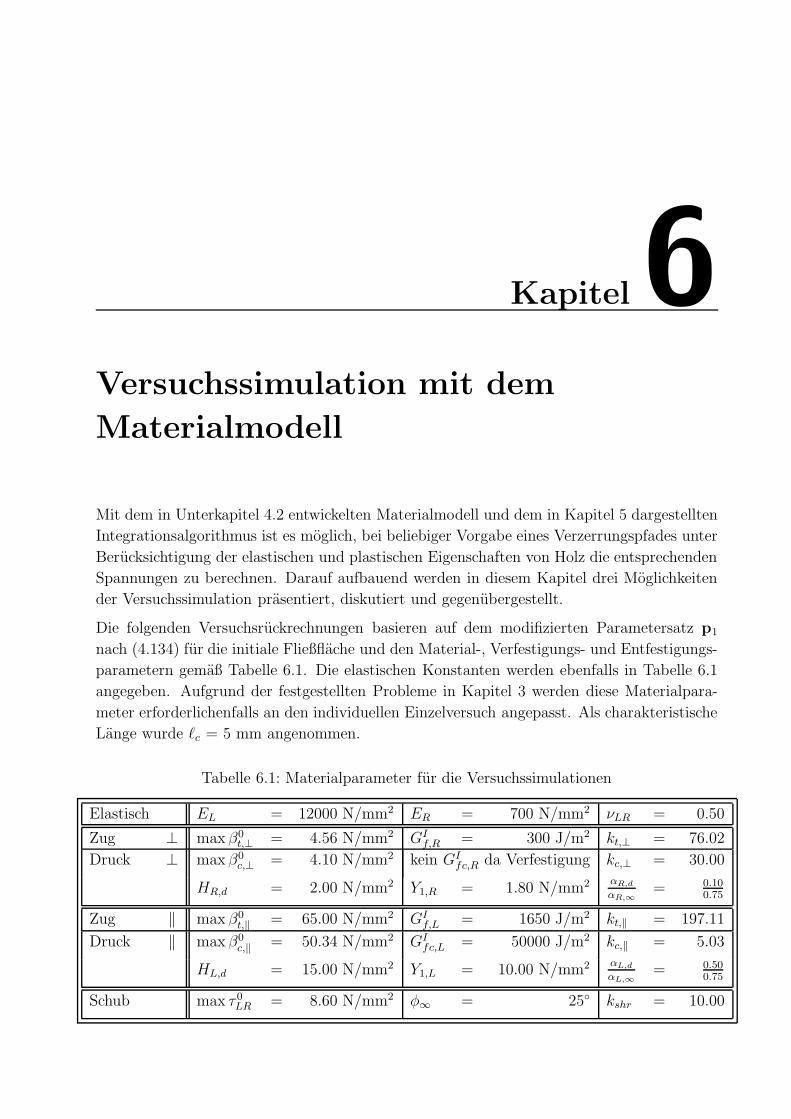
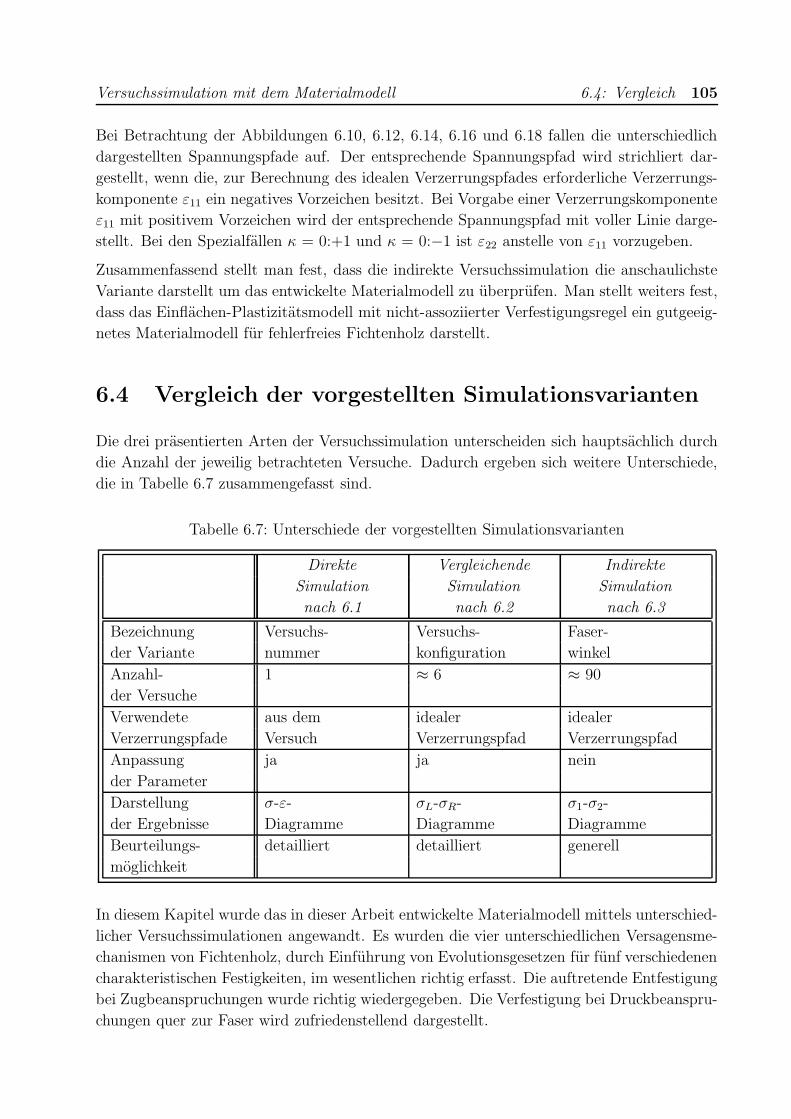
6 Versuchssimulation mit dem Materialmodell 886.1 Direkte Versuchssimulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
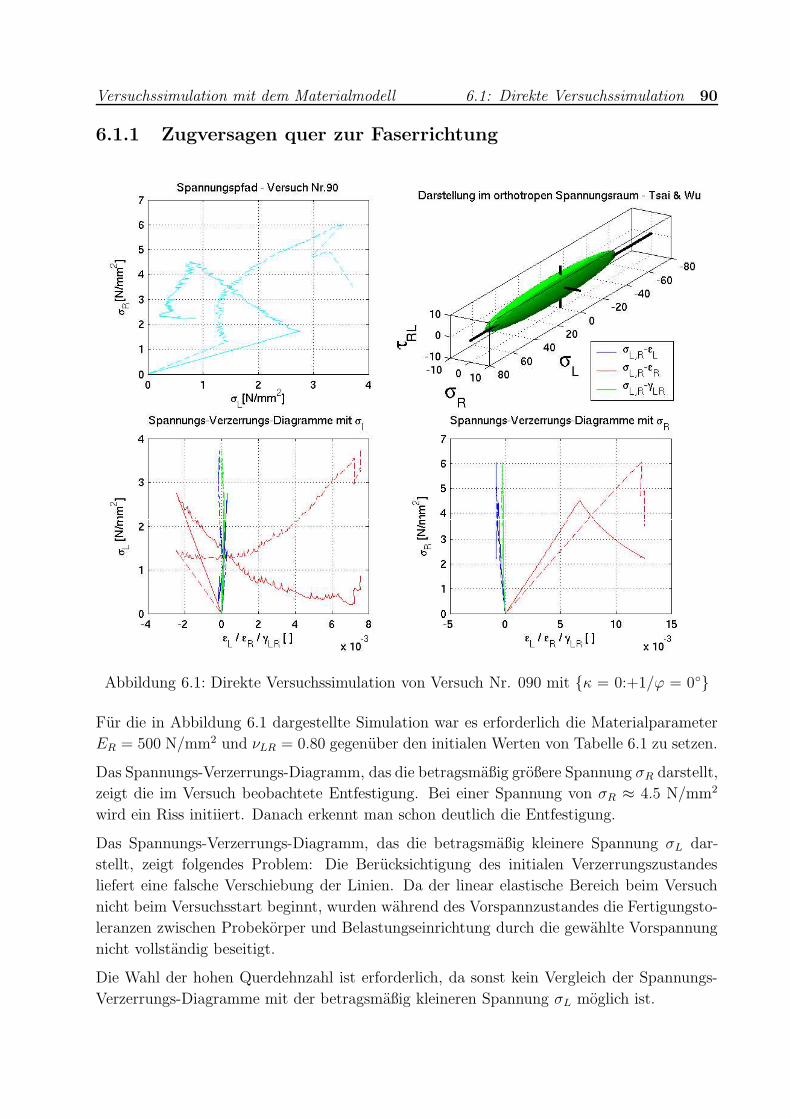
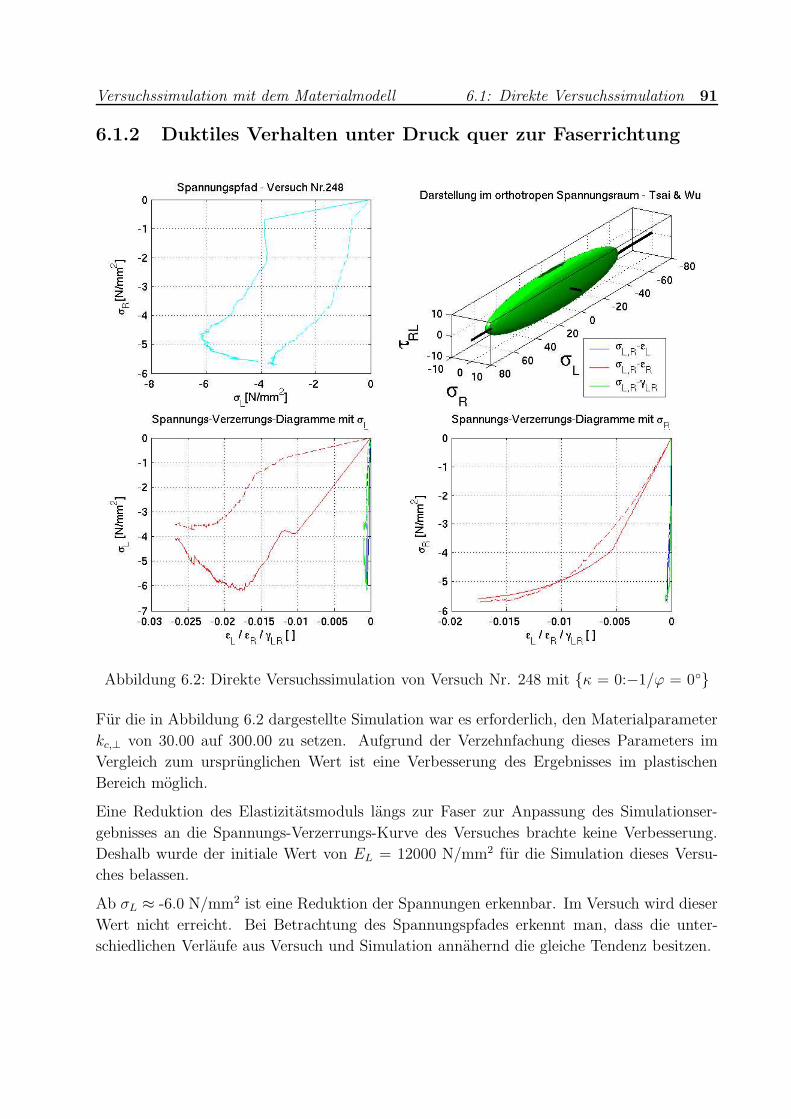
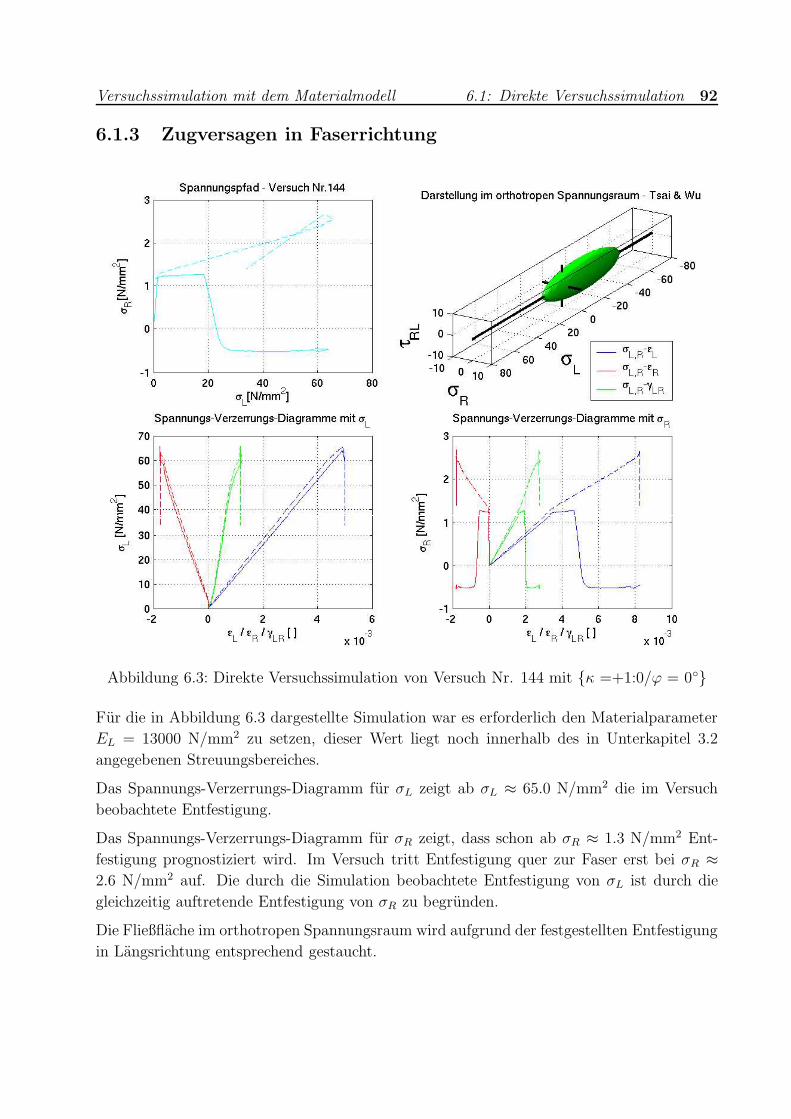
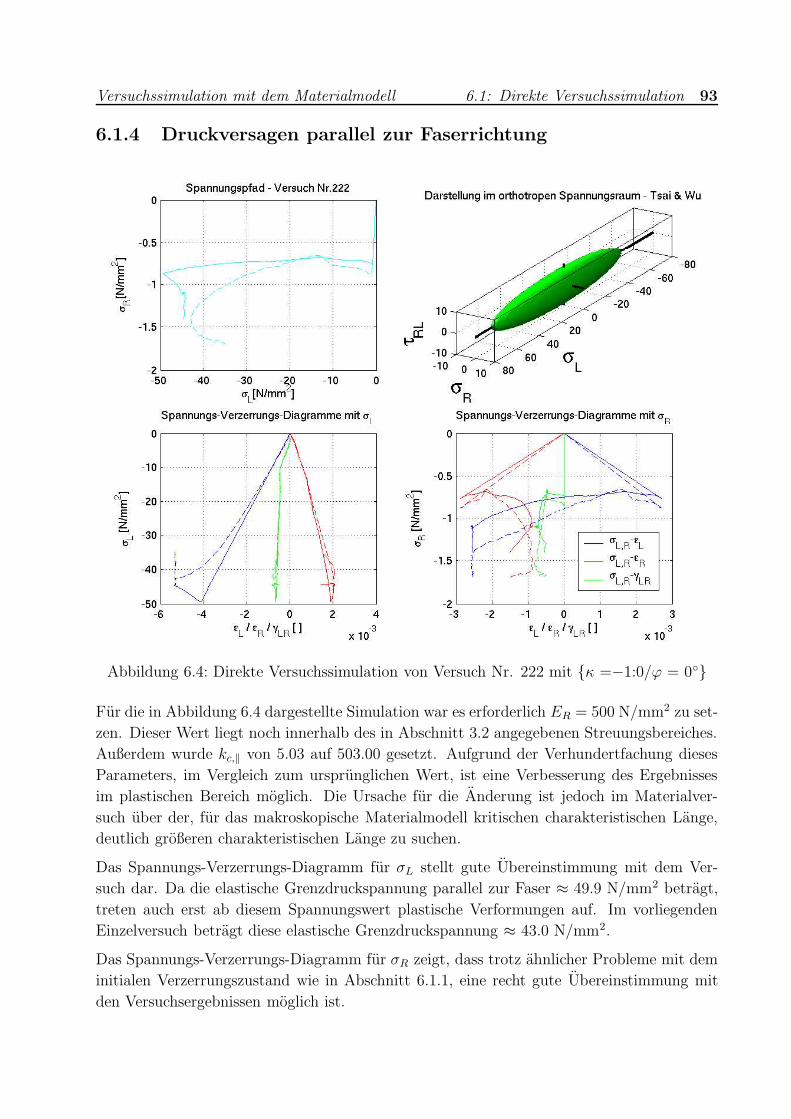
6.1.1 Zugversagen quer zur Faserrichtung . . . . . . . . . . . . . . . . . . . 906.1.2 Duktiles Verhalten unter Druck quer zur Faserrichtung . . . . . . . . 916.1.3 Zugversagen in Faserrichtung . . . . . . . . . . . . . . . . . . . . . . 926.1.4 Druckversagen parallel zur Faserrichtung . . . . . . . . . . . . . . . . 93
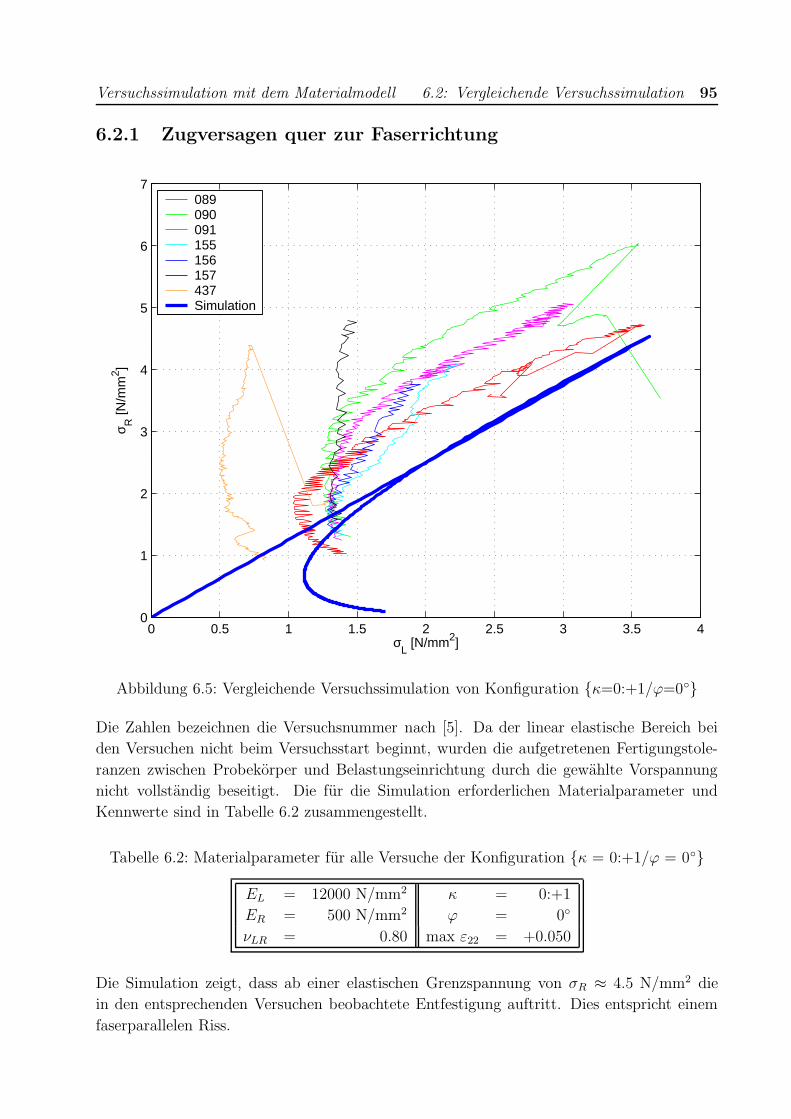
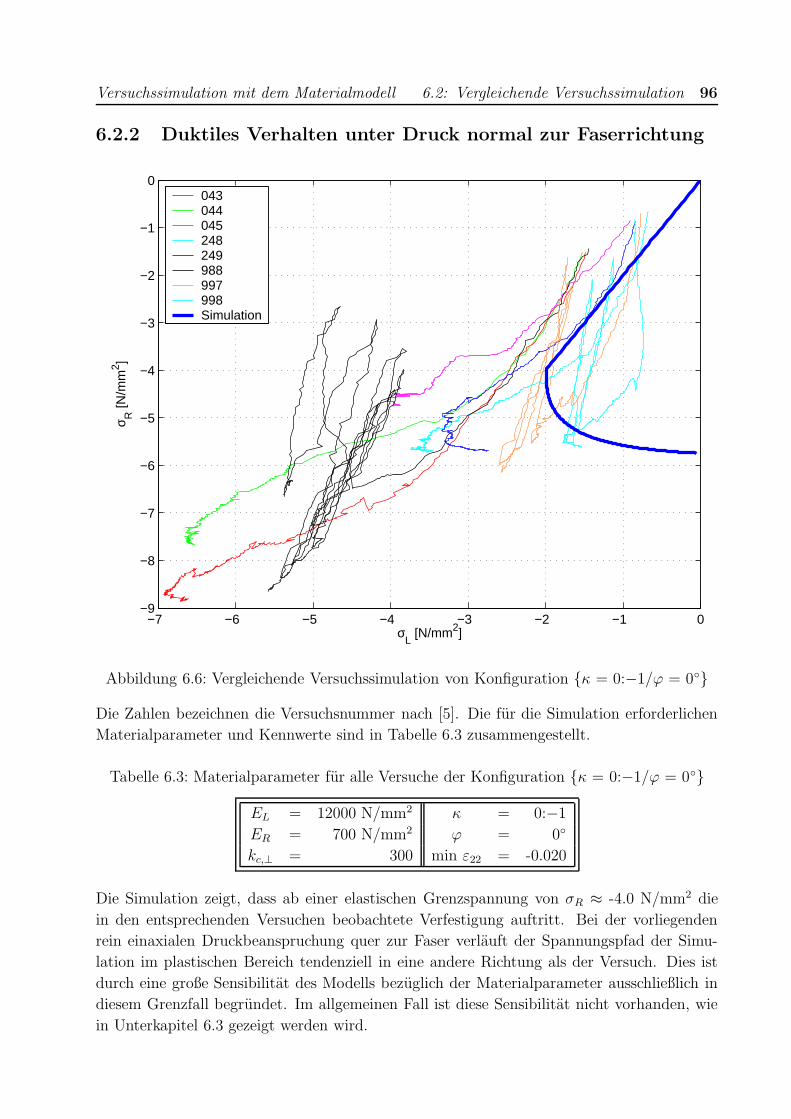
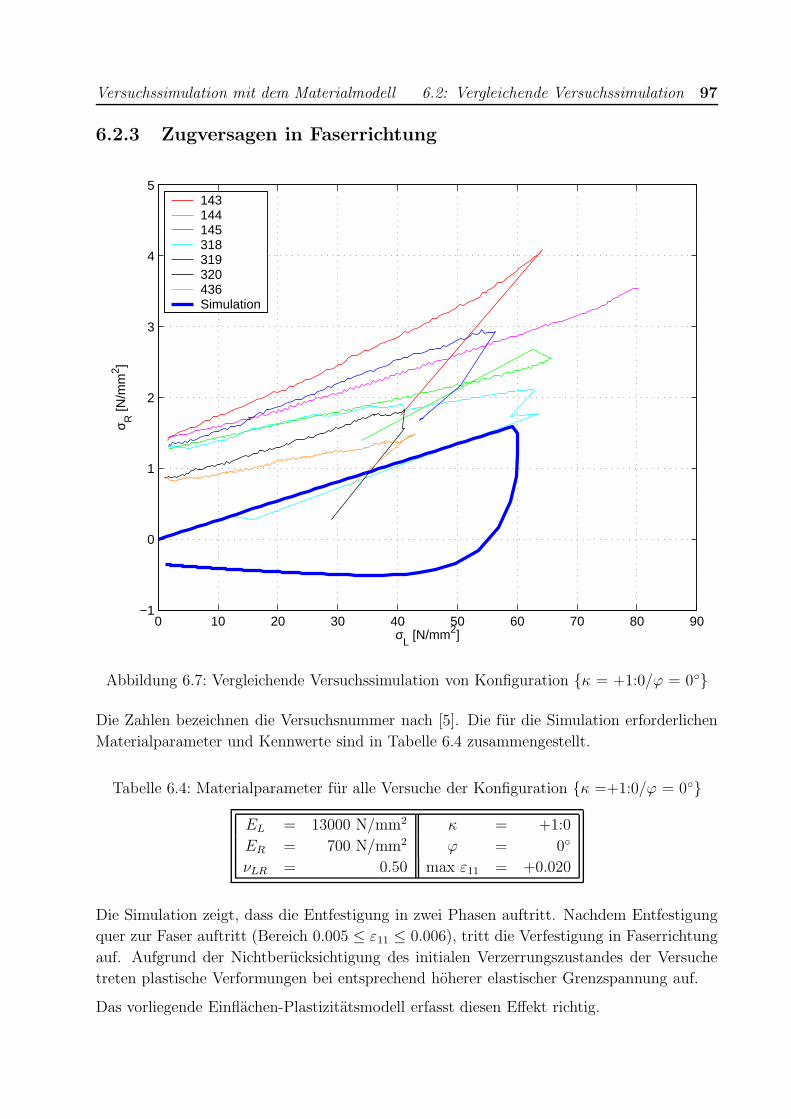
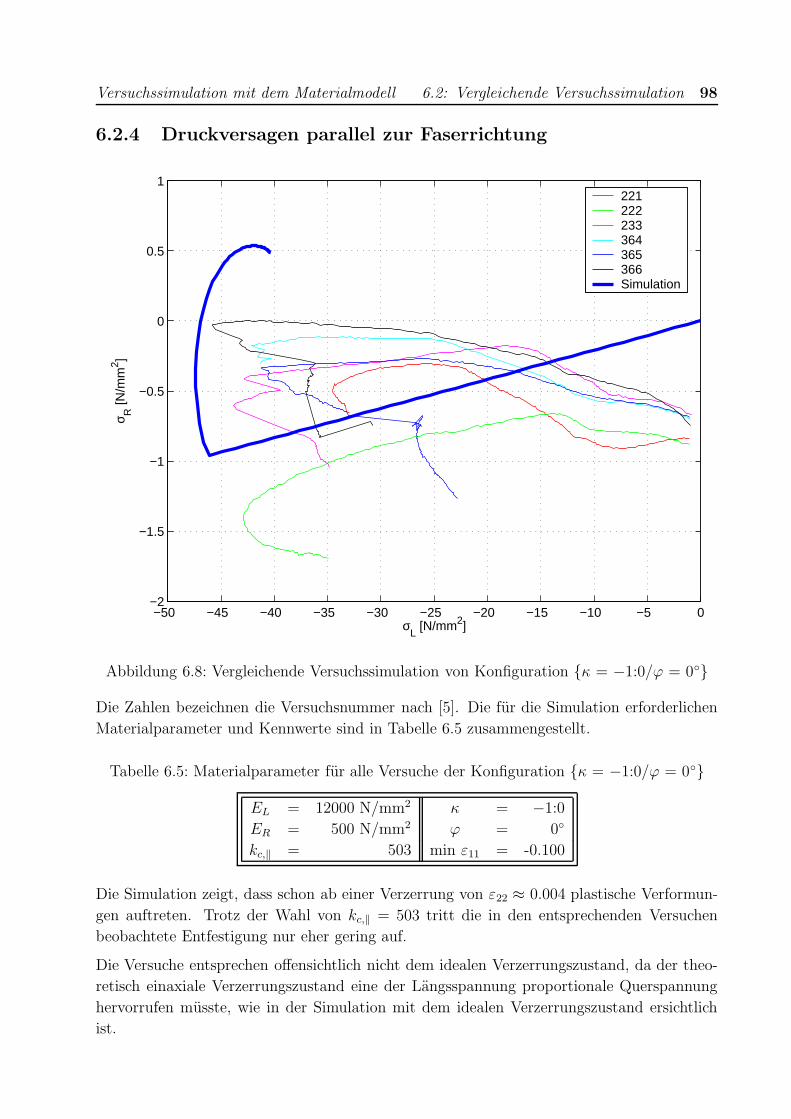
6.2 Vergleichende Versuchssimulation . . . . . . . . . . . . . . . . . . . . . . . . 946.2.1 Zugversagen quer zur Faserrichtung . . . . . . . . . . . . . . . . . . . 956.2.2 Duktiles Verhalten unter Druck normal zur Faserrichtung . . . . . . . 966.2.3 Zugversagen in Faserrichtung . . . . . . . . . . . . . . . . . . . . . . 976.2.4 Druckversagen parallel zur Faserrichtung . . . . . . . . . . . . . . . . 98
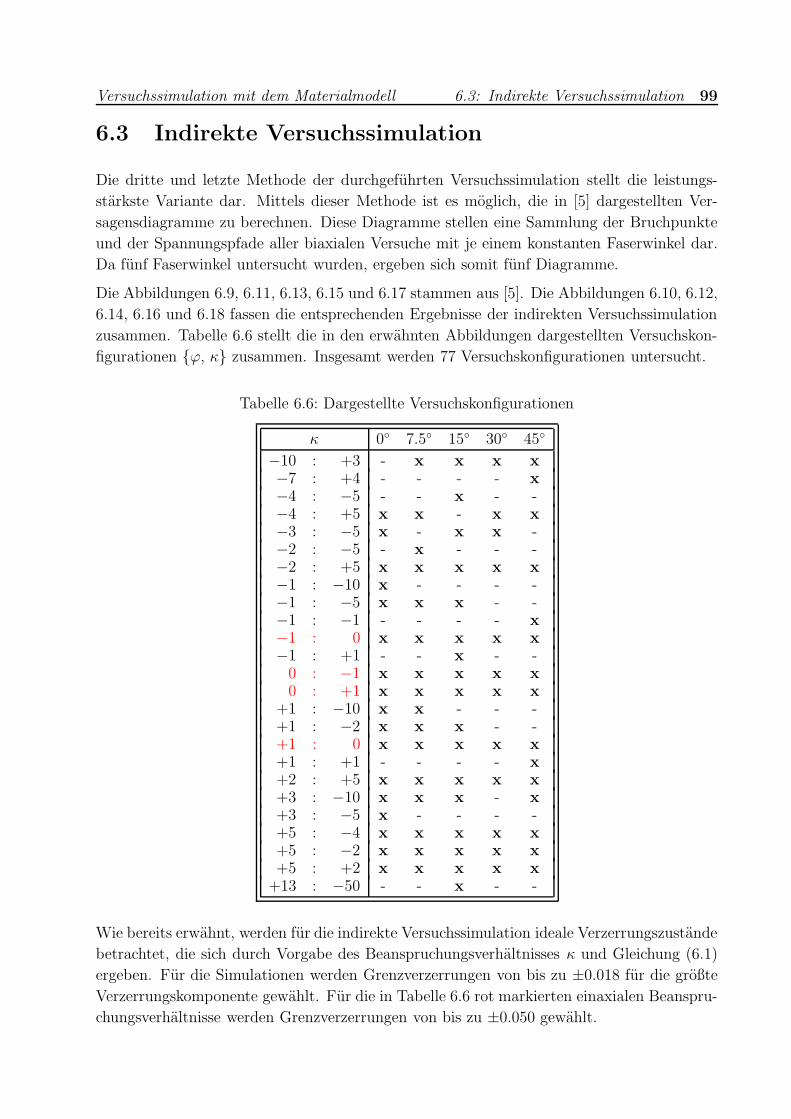
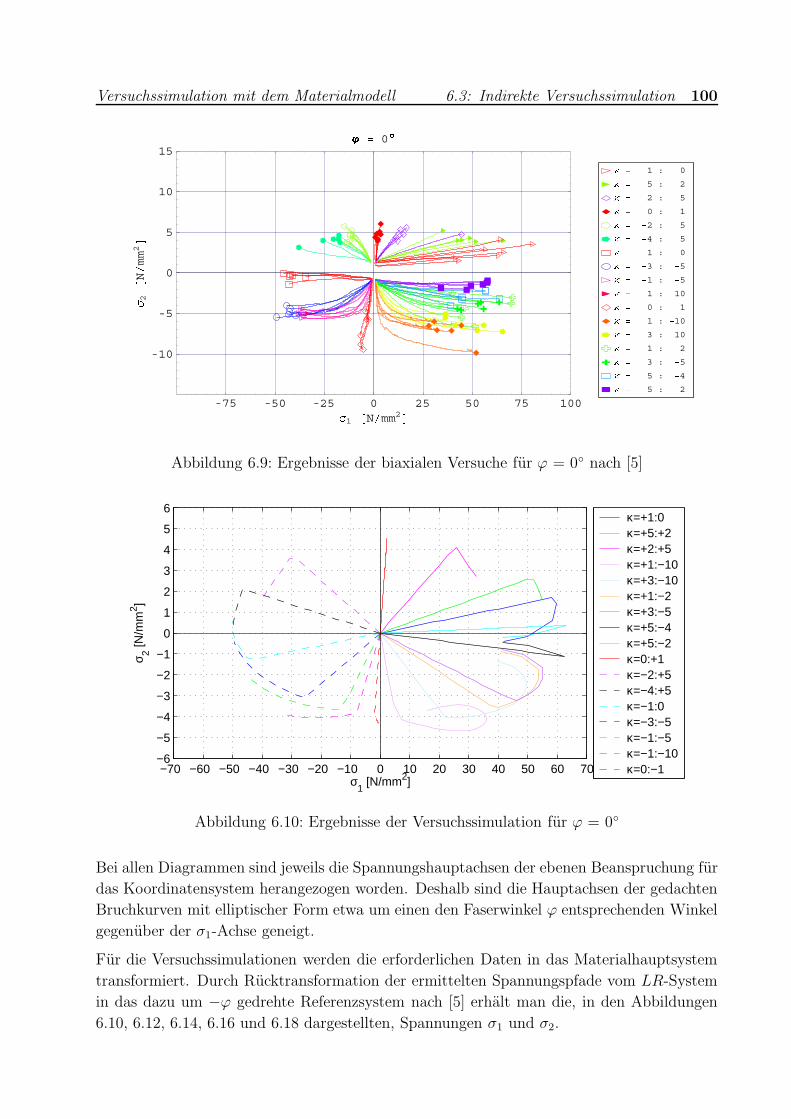
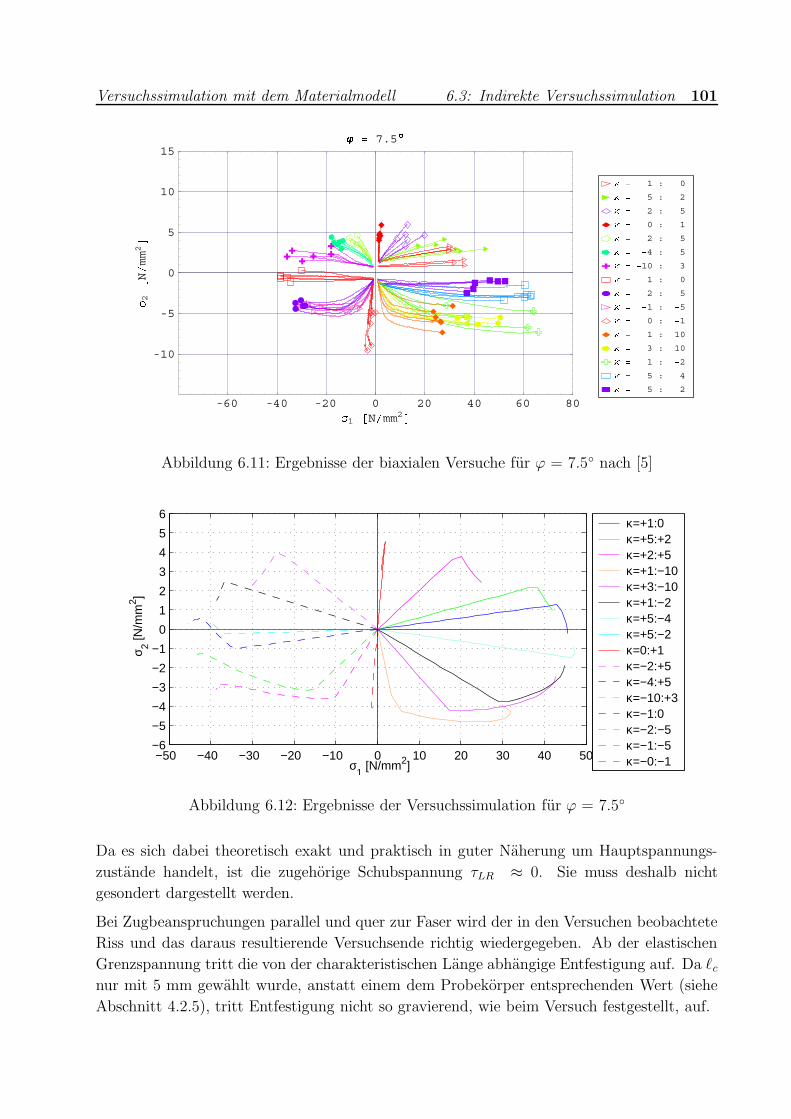
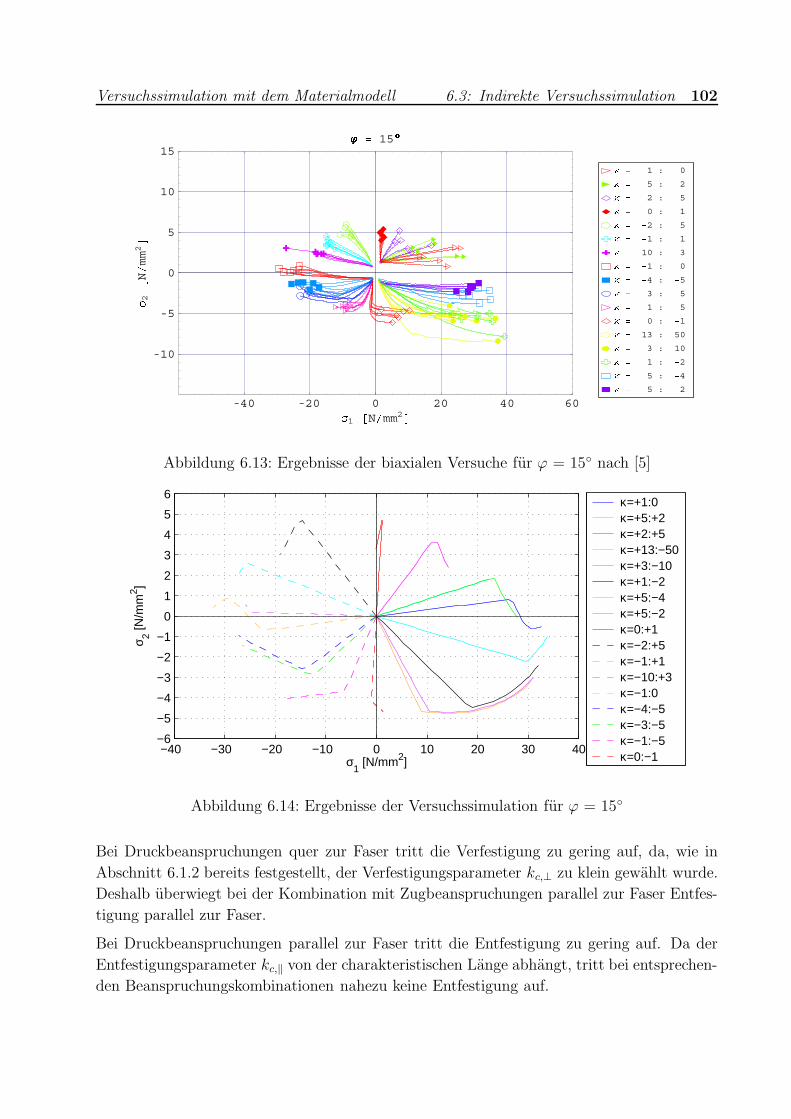
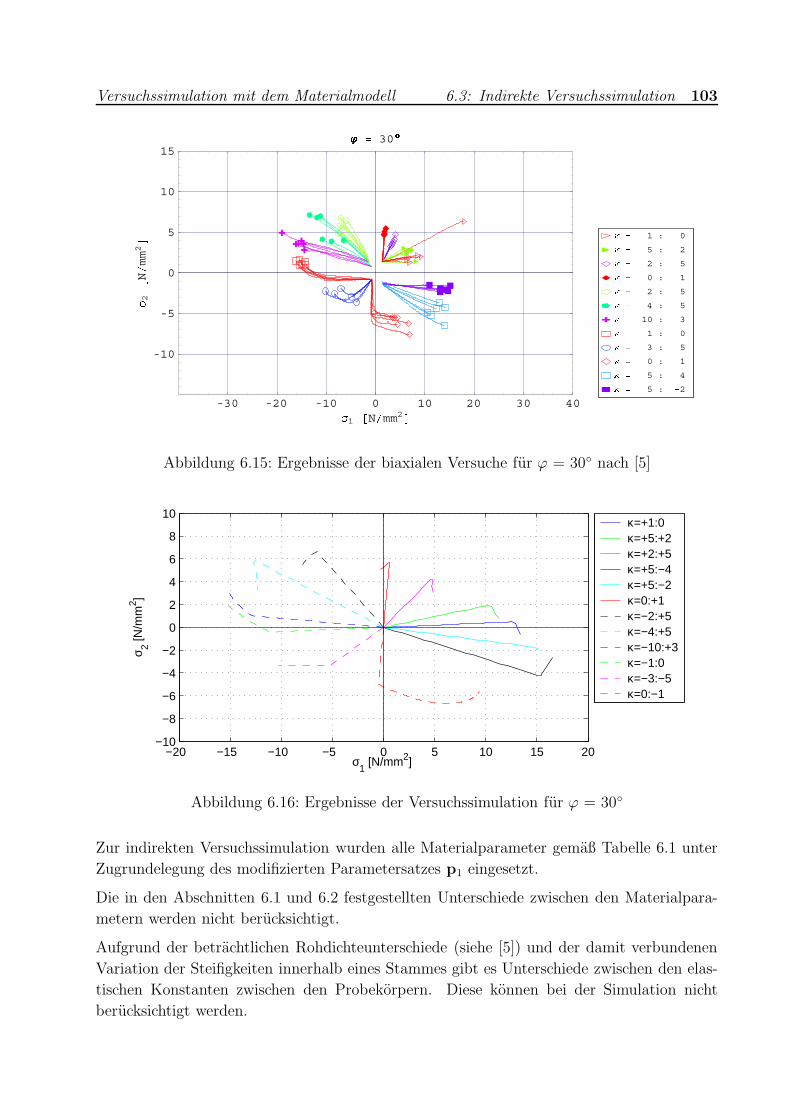
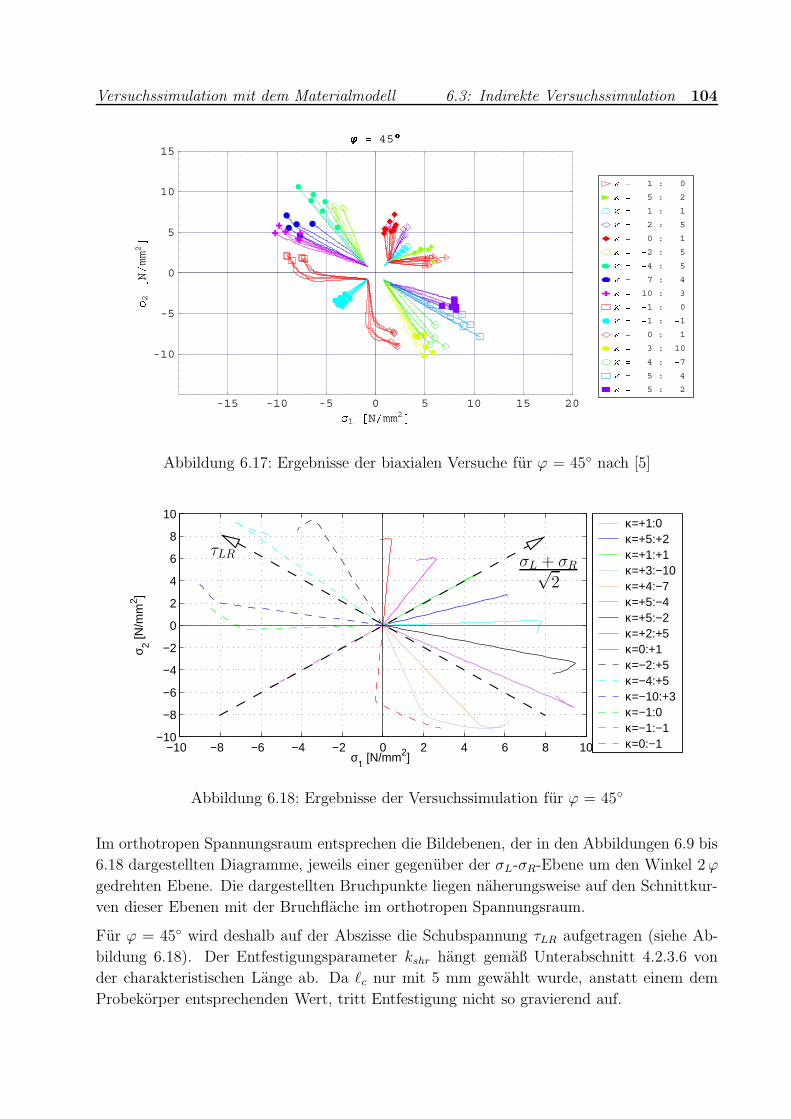
6.3 Indirekte Versuchssimulation . . . . . . . . . . . . . . . . . . . . . . . . . . . 996.4 Vergleich der vorgestellten Simulationsvarianten . . . . . . . . . . . . . . . . 105
7 Zusammenfassung und Ausblick 1067.1 Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1067.2 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 107
Literaturverzeichnis 108
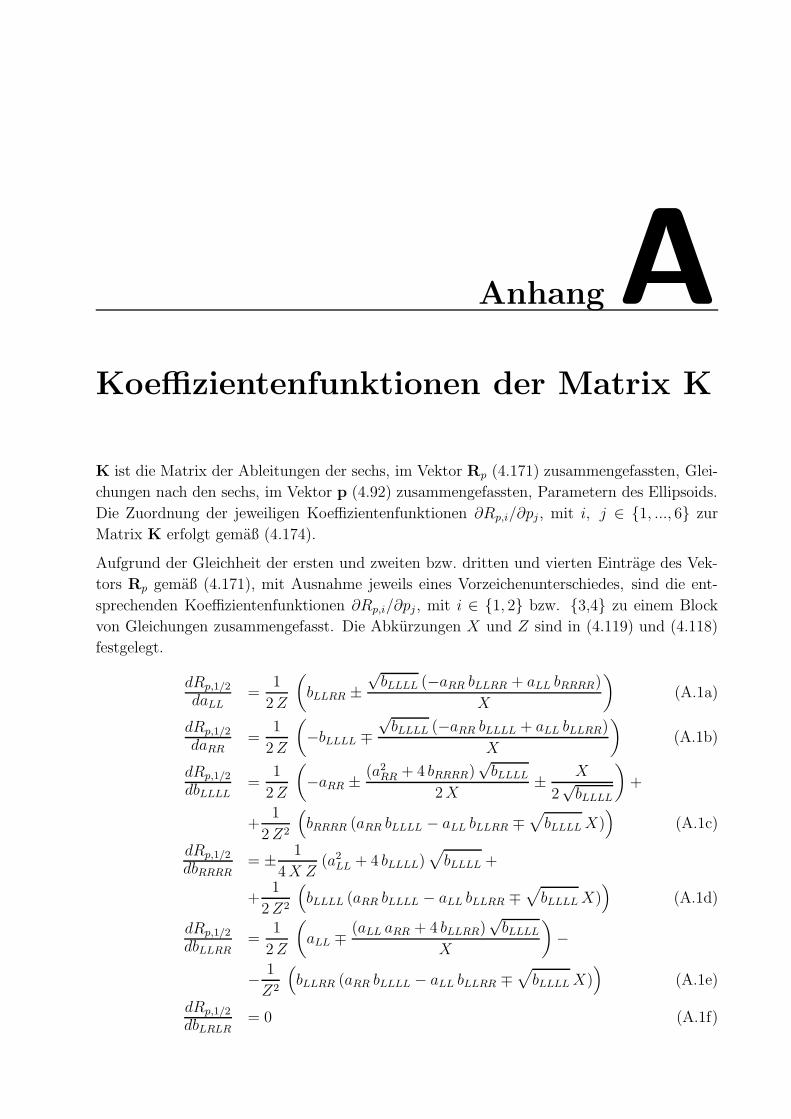
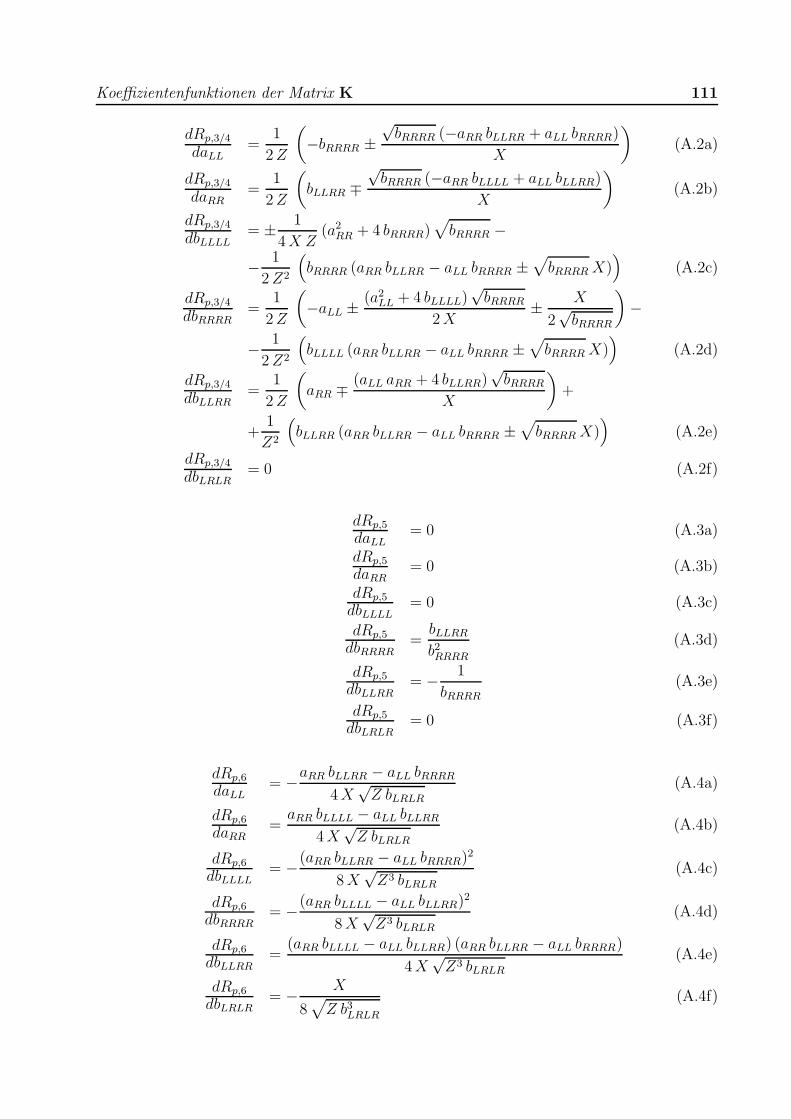
A Koeffizientenfunktionen der Matrix K 110
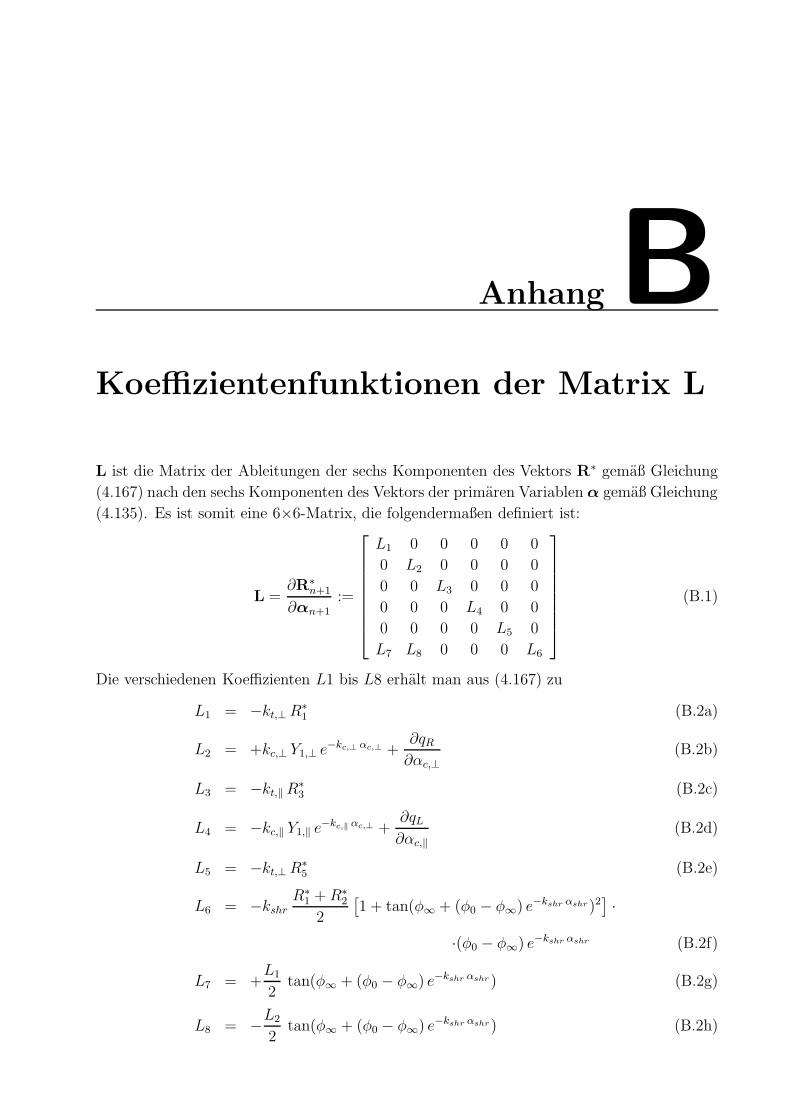
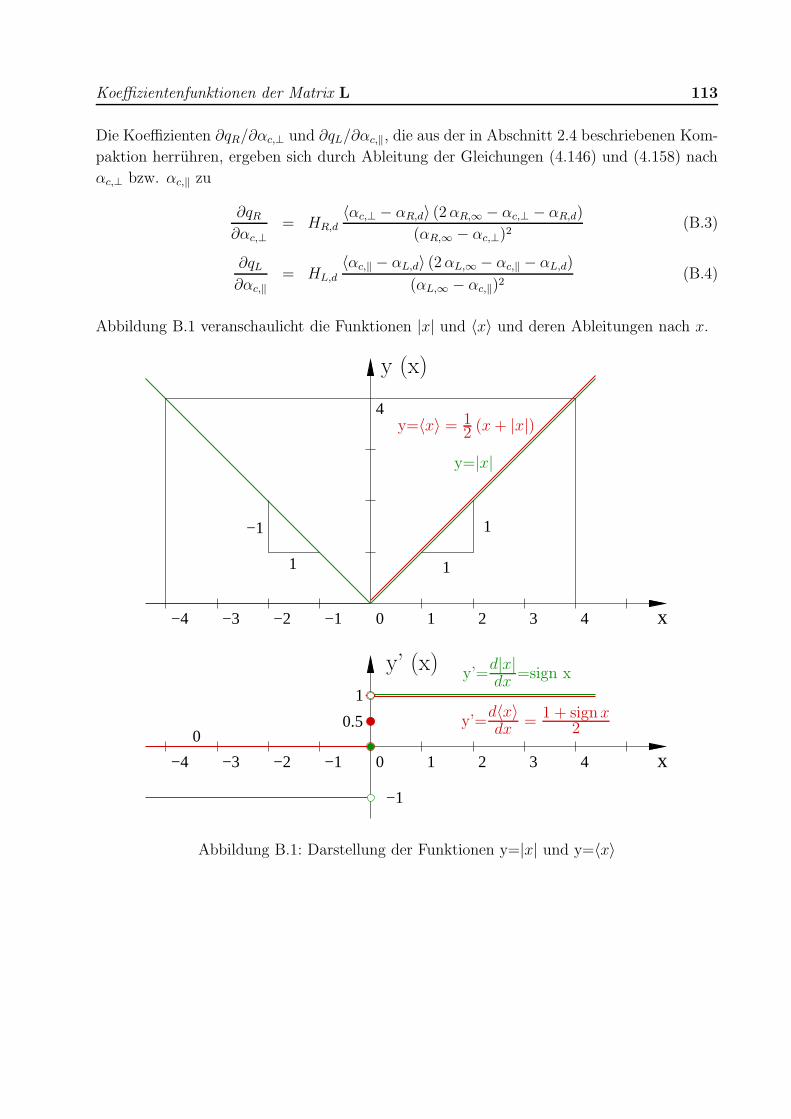
B Koeffizientenfunktionen der Matrix L 112
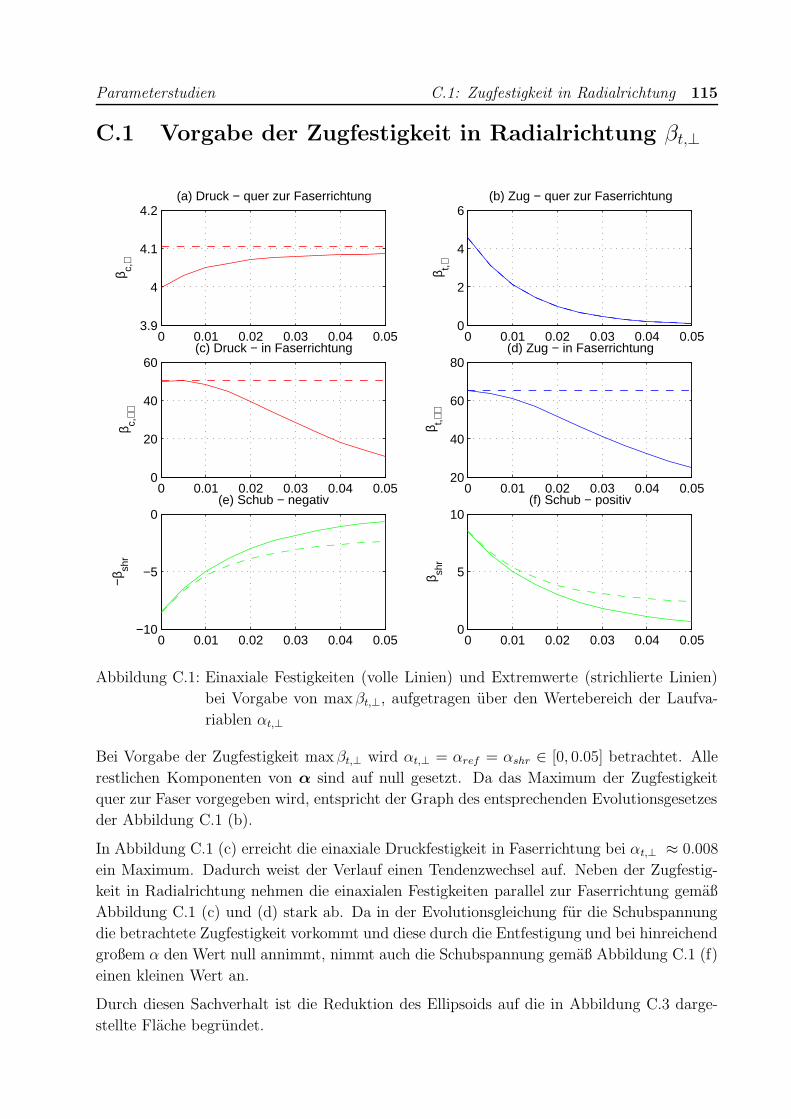
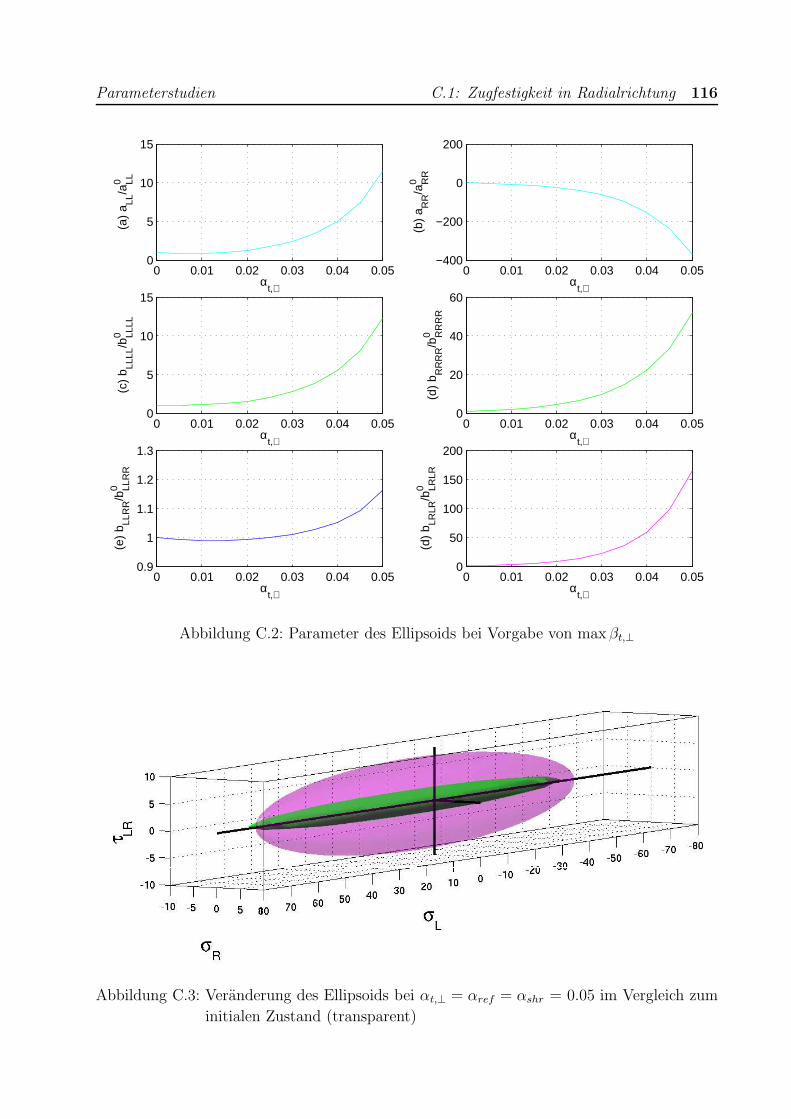
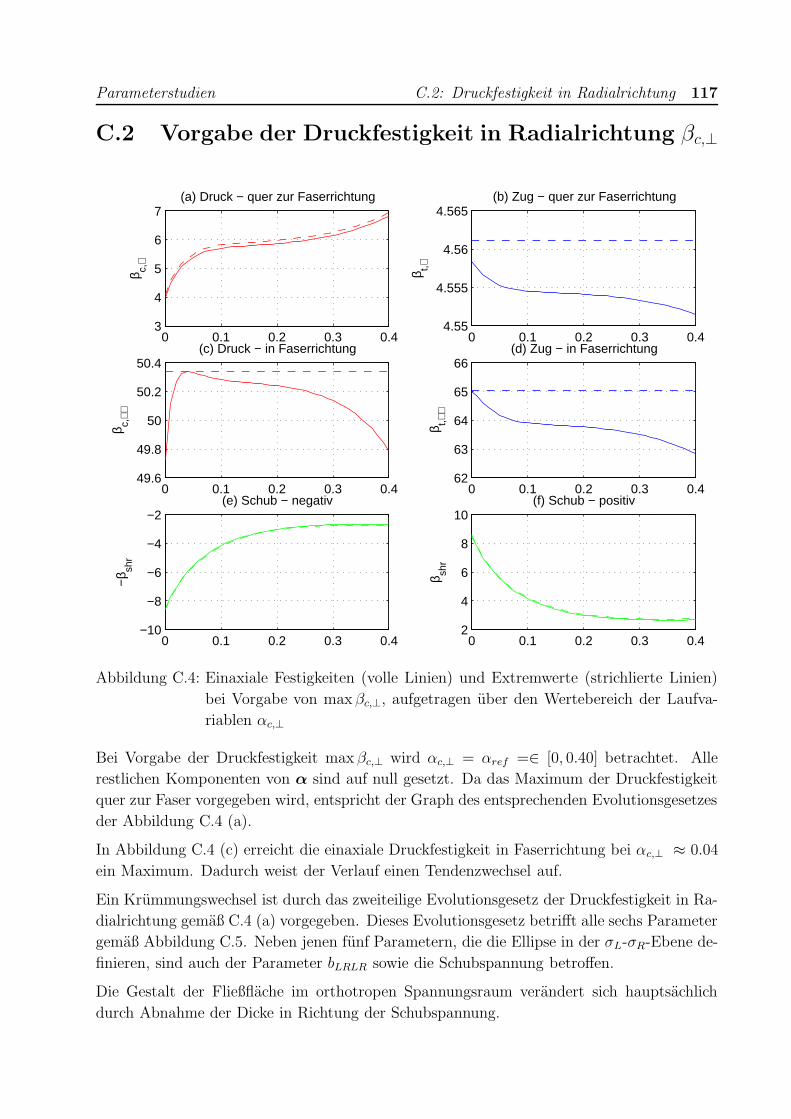
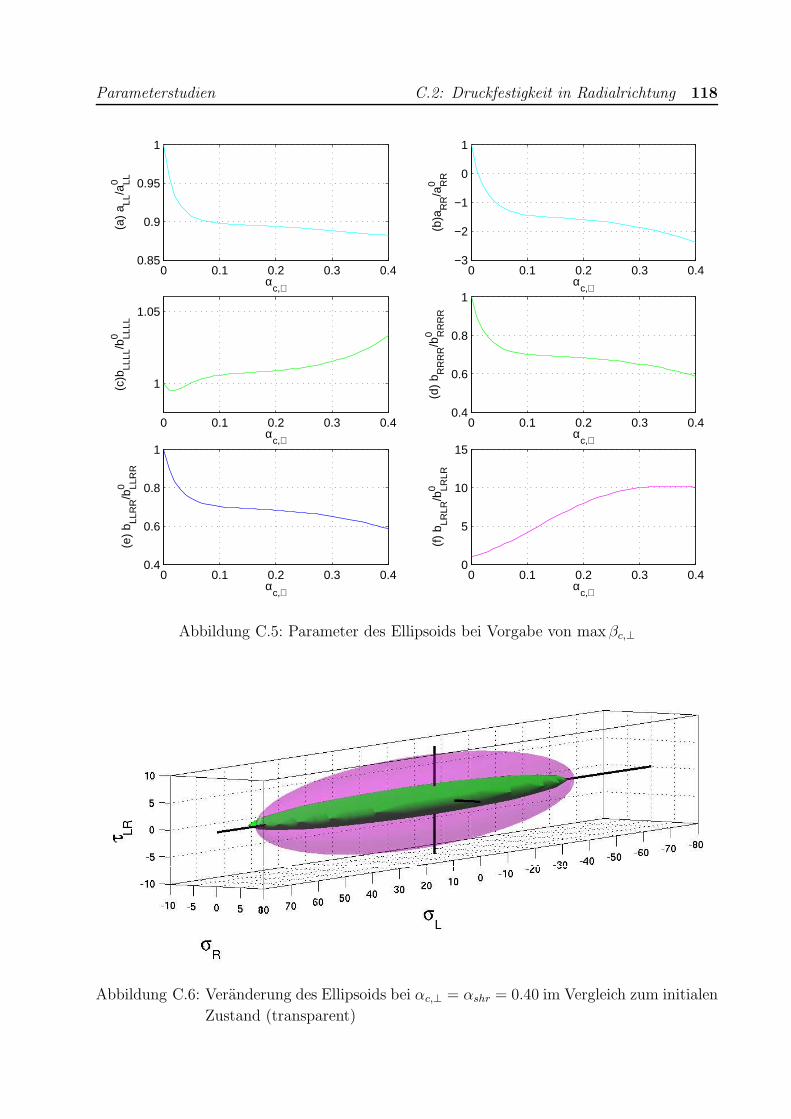
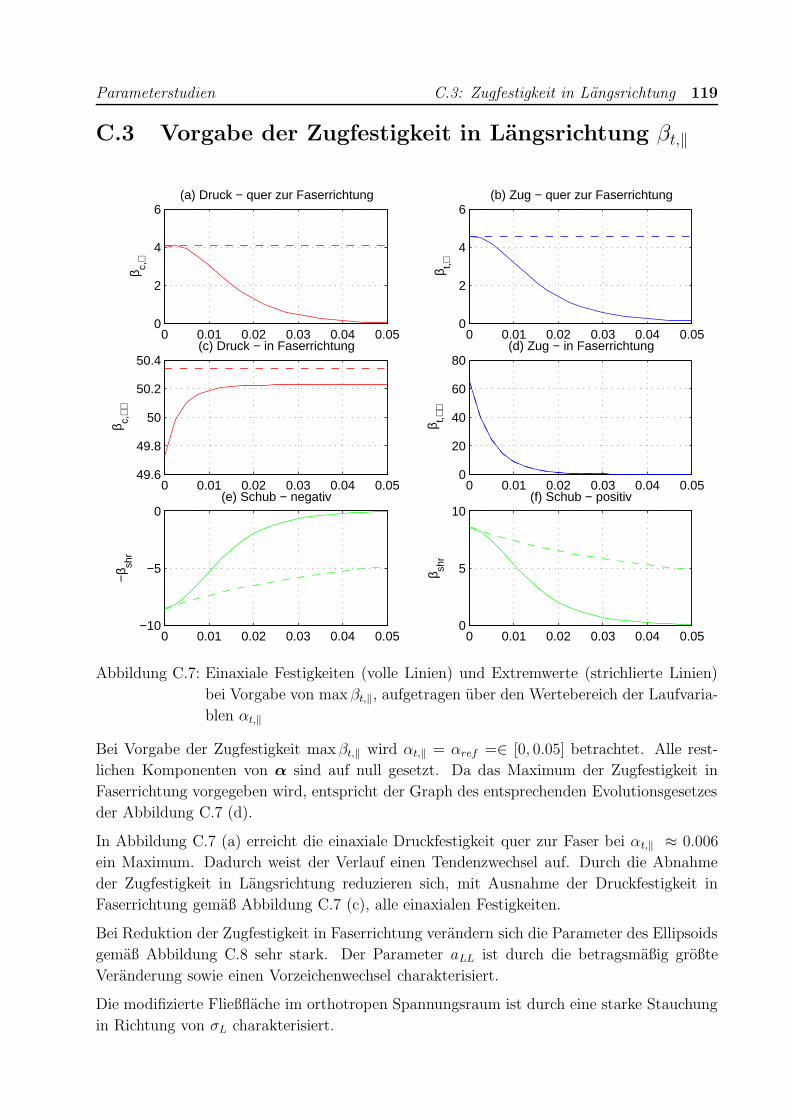
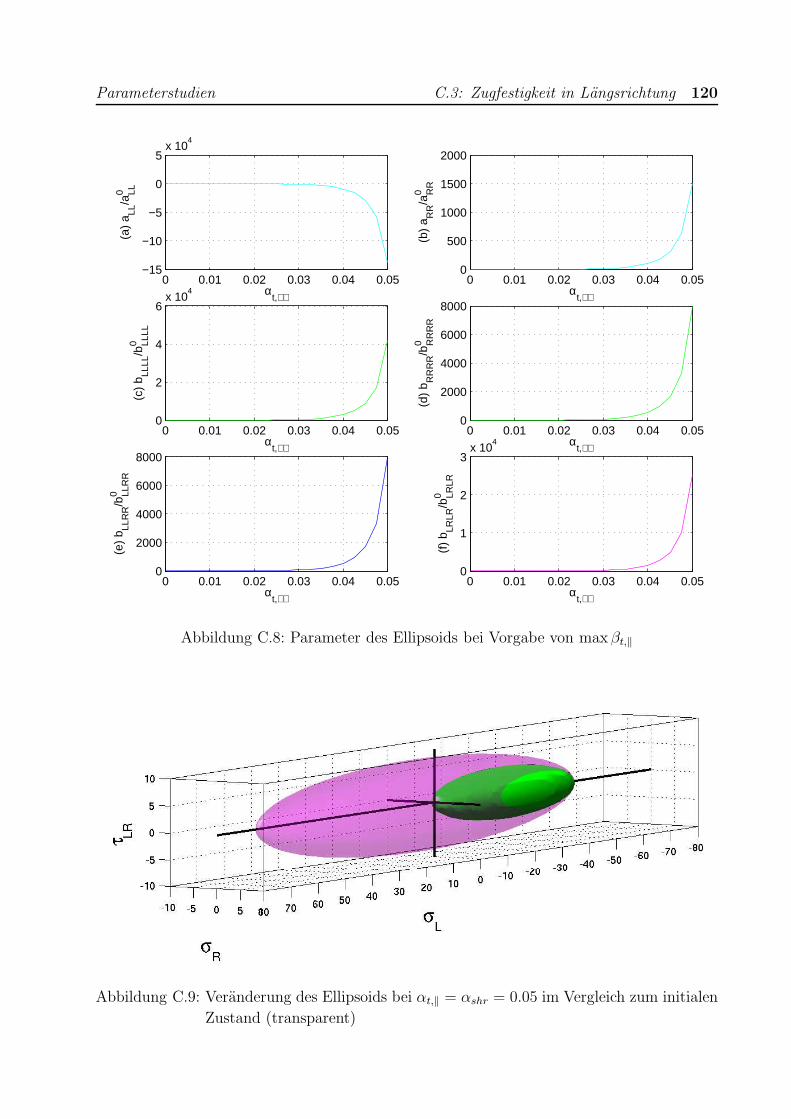
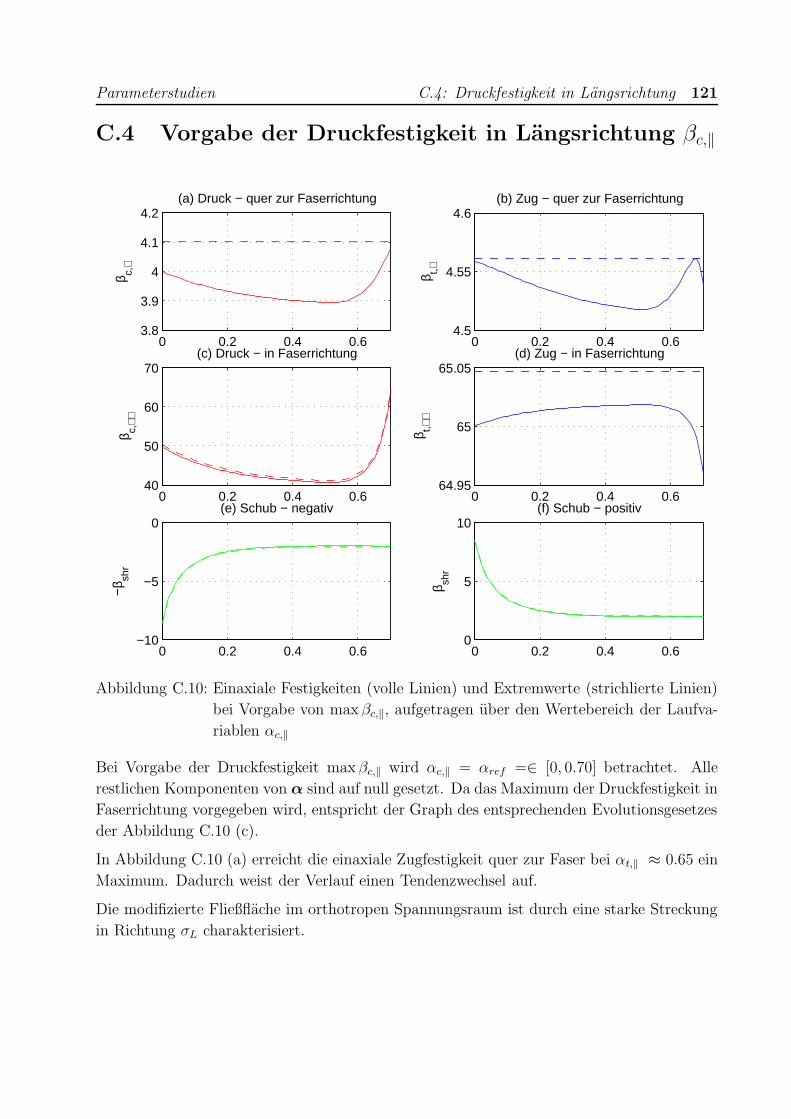
C Parameterstudien fur verschiedene Evolutionsgesetze 114C.1 Vorgabe der Zugfestigkeit in Radialrichtung βt,⊥ . . . . . . . . . . . . . . . . 115C.2 Vorgabe der Druckfestigkeit in Radialrichtung βc,⊥ . . . . . . . . . . . . . . . 117C.3 Vorgabe der Zugfestigkeit in Langsrichtung βt,‖ . . . . . . . . . . . . . . . . 119C.4 Vorgabe der Druckfestigkeit in Langsrichtung βc,‖ . . . . . . . . . . . . . . . 121
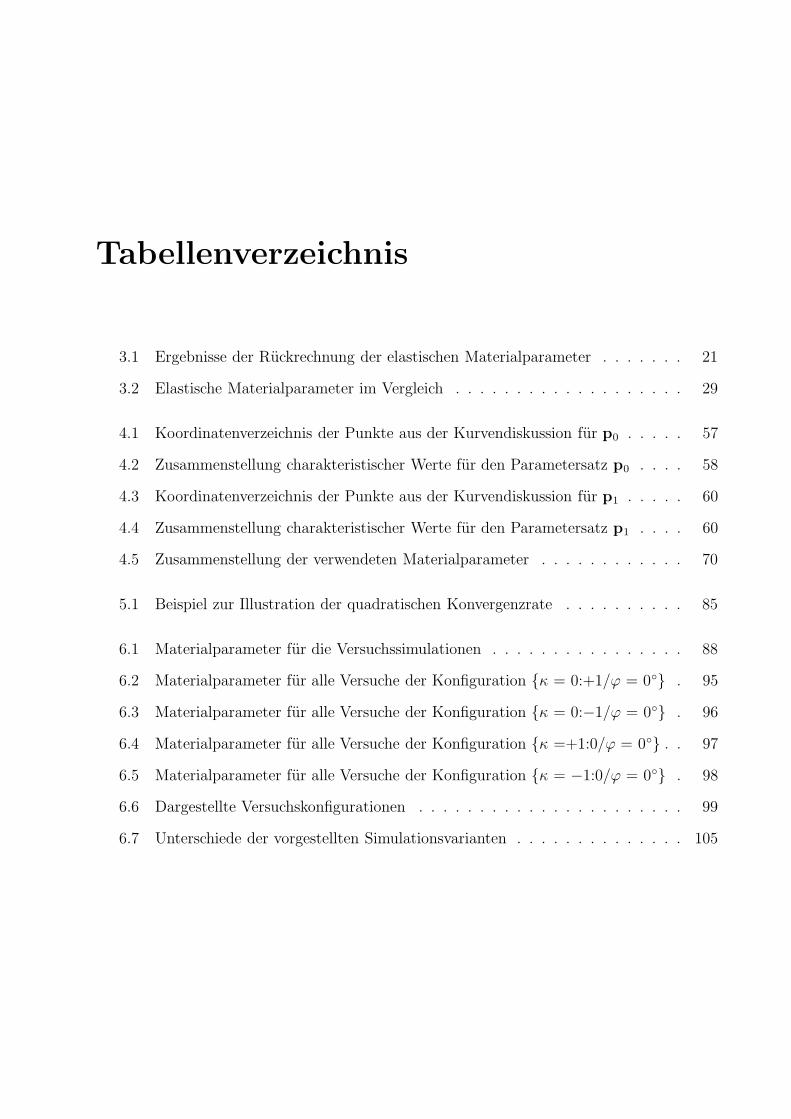
Tabellenverzeichnis 123
Abbildungsverzeichnis 124
Page 6
Kapitel1Einfuhrung
1.1 Aufgabenstellung und Losungsstrategie
In der derzeit gultigen Holzbaunorm ENV 1995-1-1:1993 [19] findet sich unter Kapitel 3.1.3
folgender Absatz die Spannungs-Verzerrungs-Beziehungen betreffend:
Da die charakteristischen Werte unter der Annahme einer geradlinigen Beziehung zwischen
Spannung und Dehnung bis zum Bruch gewonnen werden, mussen Berechnung und Bemes-
sung einzelner Bauteile ebenfalls unter der Annahme einer solchen linearen Beziehung er-
folgen. Fur Bauteile, die gleichzeitiger Biege- und Druckbeanspruchung ausgesetzt sind, darf
jedoch ein nichtlineares (elastisch-plastisches) Stoffgesetz zugrunde gelegt werden.
Ziel dieser Arbeit ist es, ein Materialmodell zu erstellen, das nicht nur dieser Norm entspricht,
sondern vielmehr auf durchgefuhrten biaxialen Versuchen aufbaut und das Verhalten von
Holz damit besser reprasentiert. Diese Arbeit stellt einen Beitrag zur Entwicklung eines
zuverlassigen Materialgesetzes fur Holz unter beliebiger mehraxialer Beanspruchung und
unter Berucksichtigung relevanter Holzmerkmale und Einflusse dar.
Ausgehend von durchgefuhrten biaxialen Versuchen an fehlerfreiem Fichtenholz wird ein
elasto-plastisches Materialmodell entwickelt, welches das rheologische Verhalten bestmog-
lichst beschreibt. Ausgangszustand stellt dabei die mittels einer Ausgleichsrechnung be-
stimmte Bruchumhullende nach Tsai und Wu [24] sowie die Beschreibung von vier Versa-
gensmechanismen, wie in Mackenzie-Helnwein et al. [12] dargestellt.
Die Anwendung des entwickelten Materialmodells zur Simulation der Versuchsserie nach
Eberhardsteiner [5] dient der Evaluierung der vorliegenden Arbeit.
Page 7
Einfuhrung 1.2: Gliederung der Arbeit 2
1.2 Gliederung der Arbeit
Den thematischen Einstieg bildet die in Kapitel 2 enthaltene Erlauterung des zugrundelie-
genden Versuchskonzepts, der verwendeten Versuchseinrichtung und der Eigenschaften der
verwendeten Probekorper. Im Anschluss wird eine Interpretation der Versuchsergebnisse
der biaxialen Bruchversuche nach Eberhardsteiner [5] hinsichtlich der zu beobachteten
Versagensmechanismen gegeben.
Das Kapitel 3 ist einer im Zuge der Bearbeitung der Diplomarbeit aufgetretenen Zusatz-
aufgabe gewidmet. Diese Aufgabe stellt den Versuch dar, die voneinander unabhangigen
elastischen Materialparameter direkt aus den jeweiligen biaxialen Versuchsdaten zu bestim-
men. Allenfalls erforderliche Zusatzinformationen werden aus den erganzend durchgefuhrten
uniaxialen Zugversuchen gewonnen.
Kapitel 4 fasst die theoretischen Grundlagen, die fur die Entwicklung eines derartigen Ma-
terialmodells notwendig sind, zusammen.
Unterkapitel 4.1 stellt die spater verwendeten Grundgleichungen der Plastizitatstheorie dar
und erlautert die Vorgangsweise bei der Ermittlung der zusatzlichen Variablen, die zur Be-
schreibung des plastischen Flusses erforderlich sind. Die Grundzuge des Projektionsver-
fahrens, welches zur Integration der plastischen Evolutionsgesetze dient, werden erlautert.
Schließlich werden anhand zweier eindimensionaler Beispiele fur Ver- bzw. Entfestigung die
Grundgleichungen der Plastizitatstheorie angewandt und diskutiert.
In Unterkapitel 4.2 wird die fur das konstitutive Modellieren von Holz verwendete Fließflache
vorgestellt. Die elliptische Flache nach Tsai und Wu [24] stellt eine derartige fur ortho-
trope Werkstoffe gut geeignete, mathematische Beschreibung von Fließ- bzw. Bruchspan-
nungszustanden dar. Fur das zu entwickelnde Materialmodell ist die Veranderbarkeit der
Form der Fließflache erforderlich. Nach der mathematischen Diskussion der Fließflache und
der Festlegung von Evolutionsgesetzen fur charakteristische Festigkeitswerte werden mittels
eines Iterationsverfahrens die Parameter der Fließflache geeignet ermittelt.
In Kapitel 5 wird die algorithmischen Behandlung des Materialmodells beschrieben. Es
wird fur das in Unterkapitel 4.2 beschriebene Materialmodell die numerische Zeitintegration
durchgefuhrt.
Der letzte Teil der Arbeit, Kapitel 6, zeigt die Anwendung des entwickelten Materialmodells
zur Simulation der Einzelversuche nach Eberhardsteiner [5]. Anhand verschiedener Ar-
ten von Versuchssimulationen wird die vorliegende Arbeit evaluiert.
Die Anhange A und B enthalten die fur die numerische Berechnung erforderlichen Ausdrucke
fur diverse Tangentenoperatoren. In Anhang C werden fur vier verschiedene Evolutionsge-
setze Parameterstudien durchgefuhrt und diskutiert.
Page 8
Kapitel2Experimentelle Untersuchungen von
Fichtenholz
Grundlage dieser Arbeit stellen die zwischen Mai 1997 und Marz 2000 von Eberhard-
steiner et al. [5], [6] und [7] am Institut fur Festigkeitslehre der Technischen Universitat
Wien durchgefuhrten 439 biaxialen Werkstoffversuche dar. Dieses Kapitel erlautert das im
Buch von Eberhardsteiner [5] ausfuhrlich beschriebene Versuchskonzept, die verwendete
Versuchseinrichtung und die Eigenschaften der verwendeten Probekorper, sowie die Inter-
pretation von Versuchsergebnissen der biaxialen Bruchversuche.
2.1 Beschreibung der Versuchseinrichtung
2.1.1 Verwendetes Versuchskonzept
Das Material Holz wird als makroskopisch homogen betrachtet. Durch den Probekorper
wird ein infinitesimales Element simuliert, das homogene Eigenschaften besitzt (mechani-
sche Homogenitat). Ziel dieser biaxialen Versuche ist es, die Bruchfestigkeit von Holz unter
biaxialen, ebenen Spannungszustanden zu ermitteln. Dazu ist das Auftreten der Maxi-
malbeanspruchung, sowie ein homogener Spannungs- und Verzerrungszustand innerhalb des
Messfeldes des Probekorpers erforderlich.
Neben der angesprochenen mechanischen Homogenitat ist weiters die technologische Homo-
genitat zu berucksichtigen. Deshalb wurde fur die Werkstoffversuche ausgewahltes, techno-
logisch fehlerfreies und homogenes Fichtenholz verwendet. Im 140×140 mm großen Messbe-
reich sollte der Jahrringverlauf geradlinig und parallel sein. Daher musste der Einfluss von
Astigkeit, Schadlingsbefall, Wachstumsfehlern und sonstigen Holzfehlern auf die mechani-
schen Werkstoffeigenschaften nicht berucksichtigt werden.
Page 9
Experimentelle Untersuchungen von Fichtenholz 2.1: Versuchseinrichtung 4
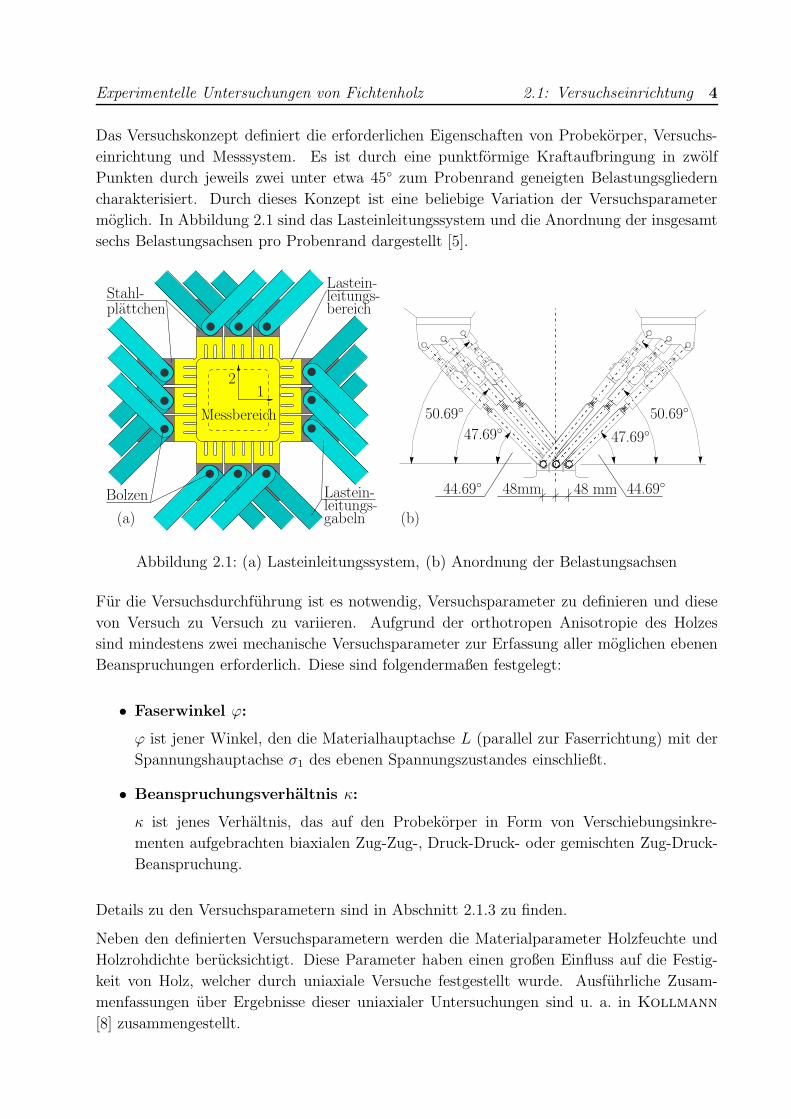
Das Versuchskonzept definiert die erforderlichen Eigenschaften von Probekorper, Versuchs-
einrichtung und Messsystem. Es ist durch eine punktformige Kraftaufbringung in zwolf
Punkten durch jeweils zwei unter etwa 45 zum Probenrand geneigten Belastungsgliedern
charakterisiert. Durch dieses Konzept ist eine beliebige Variation der Versuchsparameter
moglich. In Abbildung 2.1 sind das Lasteinleitungssystem und die Anordnung der insgesamt
sechs Belastungsachsen pro Probenrand dargestellt [5].
Bolzen 48 mm48mm
(b)(a)
50.6950.69
47.69 47.69
44.69 44.69
Messbereich
gabelnleitungs-Lastein-
bereichleitungs-Lastein-
1
plattchenStahl-
2
Abbildung 2.1: (a) Lasteinleitungssystem, (b) Anordnung der Belastungsachsen
Fur die Versuchsdurchfuhrung ist es notwendig, Versuchsparameter zu definieren und diese
von Versuch zu Versuch zu variieren. Aufgrund der orthotropen Anisotropie des Holzes
sind mindestens zwei mechanische Versuchsparameter zur Erfassung aller moglichen ebenen
Beanspruchungen erforderlich. Diese sind folgendermaßen festgelegt:
• Faserwinkel ϕ:
ϕ ist jener Winkel, den die Materialhauptachse L (parallel zur Faserrichtung) mit der
Spannungshauptachse σ1 des ebenen Spannungszustandes einschließt.
• Beanspruchungsverhaltnis κ:
κ ist jenes Verhaltnis, das auf den Probekorper in Form von Verschiebungsinkre-
menten aufgebrachten biaxialen Zug-Zug-, Druck-Druck- oder gemischten Zug-Druck-
Beanspruchung.
Details zu den Versuchsparametern sind in Abschnitt 2.1.3 zu finden.
Neben den definierten Versuchsparametern werden die Materialparameter Holzfeuchte und
Holzrohdichte berucksichtigt. Diese Parameter haben einen großen Einfluss auf die Festig-
keit von Holz, welcher durch uniaxiale Versuche festgestellt wurde. Ausfuhrliche Zusam-
menfassungen uber Ergebnisse dieser uniaxialer Untersuchungen sind u. a. in Kollmann
[8] zusammengestellt.
Page 10
Experimentelle Untersuchungen von Fichtenholz 2.1: Versuchseinrichtung 5
Die zwei wesentlichen Einflussparameter fur die Festigkeit von Holz werden bei der biaxialen
Versuchsdurchfuhrung wie folgt berucksichtigt (Niemz [14]):
• Holzfeuchtigkeit u:
Durch Klimatisierung der Proben in einer Klimakammer laut DIN 52183 [4] bei einer
Temperatur von T = +20 C und einer relativen Luftfeuchtigkeit RH = 65 % wurde
die Holzfeuchtigkeit u mit 12 % und damit auch deren Einfluss auf die Festigkeitsei-
genschaften konstant gehalten.
• Rohdichte ρ:
Die Rohdichten der entsprechenden Proben wurden durch Volumen- und Massebestim-
mung gemaß DIN 52182 [3] ermittelt. Ihr Einfluss auf charakteristische Festigkeits-
werte wurde mittels uniaxialer Vorversuche ermittelt und mittels linearer Regression
von Gingerl [7] und Eberhardsteiner [5] beschrieben.
2.1.2 Beschreibung des Probekorpers
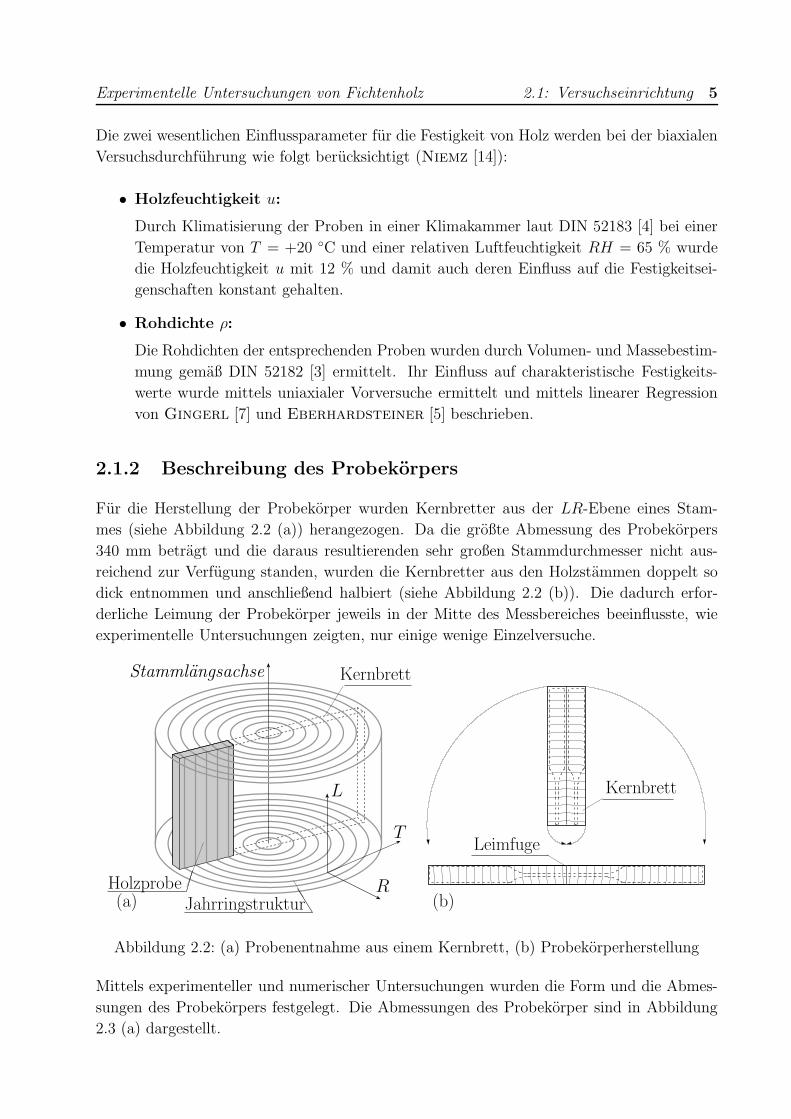
Fur die Herstellung der Probekorper wurden Kernbretter aus der LR-Ebene eines Stam-
mes (siehe Abbildung 2.2 (a)) herangezogen. Da die großte Abmessung des Probekorpers
340 mm betragt und die daraus resultierenden sehr großen Stammdurchmesser nicht aus-
reichend zur Verfugung standen, wurden die Kernbretter aus den Holzstammen doppelt so
dick entnommen und anschließend halbiert (siehe Abbildung 2.2 (b)). Die dadurch erfor-
derliche Leimung der Probekorper jeweils in der Mitte des Messbereiches beeinflusste, wie
experimentelle Untersuchungen zeigten, nur einige wenige Einzelversuche.
Stammlängsachse
Scheibenförmige Holzprobe Jahresringstruktur
L
R
T
Kernbrett
Kernbrett
Leimfuge
T
R
L
Stammlangsachse Kernbrett
Jahrringstruktur
Leimfuge
Kernbrett
(b)(a)Holzprobe
Abbildung 2.2: (a) Probenentnahme aus einem Kernbrett, (b) Probekorperherstellung
Mittels experimenteller und numerischer Untersuchungen wurden die Form und die Abmes-
sungen des Probekorpers festgelegt. Die Abmessungen des Probekorper sind in Abbildung
2.3 (a) dargestellt.
Page 11
Experimentelle Untersuchungen von Fichtenholz 2.1: Versuchseinrichtung 6
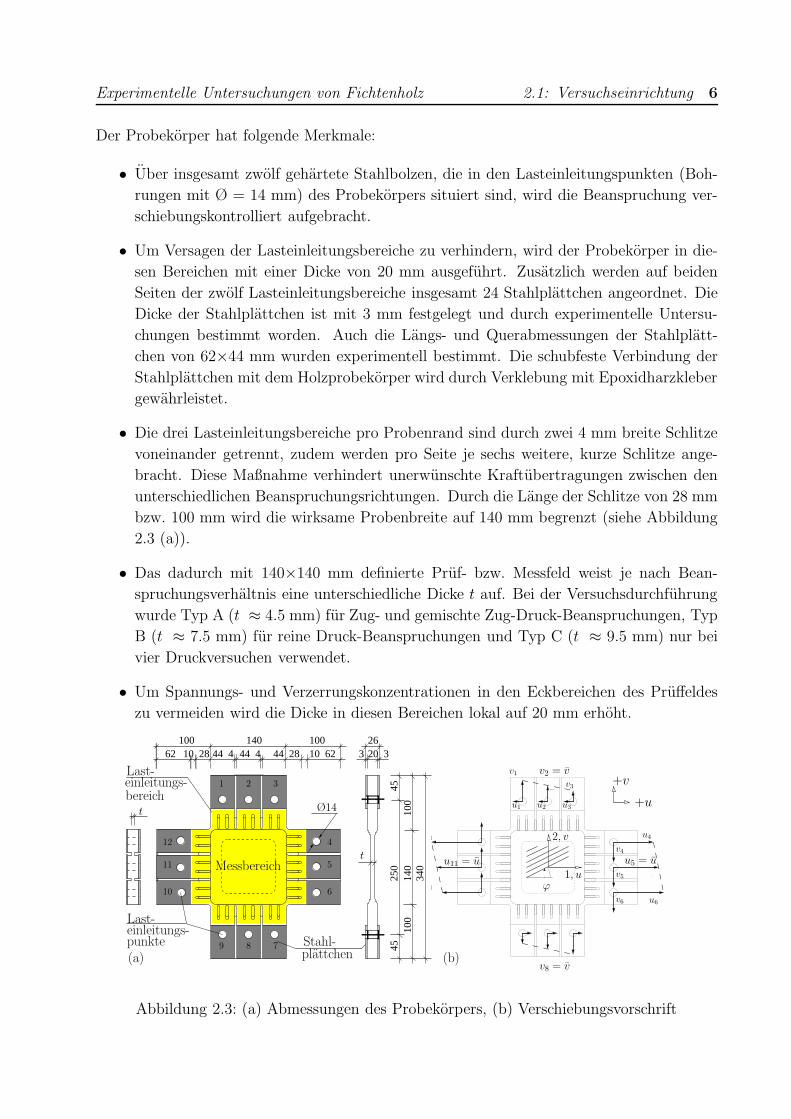
Der Probekorper hat folgende Merkmale:
• Uber insgesamt zwolf gehartete Stahlbolzen, die in den Lasteinleitungspunkten (Boh-
rungen mit Ø = 14 mm) des Probekorpers situiert sind, wird die Beanspruchung ver-
schiebungskontrolliert aufgebracht.
• Um Versagen der Lasteinleitungsbereiche zu verhindern, wird der Probekorper in die-
sen Bereichen mit einer Dicke von 20 mm ausgefuhrt. Zusatzlich werden auf beiden
Seiten der zwolf Lasteinleitungsbereiche insgesamt 24 Stahlplattchen angeordnet. Die
Dicke der Stahlplattchen ist mit 3 mm festgelegt und durch experimentelle Untersu-
chungen bestimmt worden. Auch die Langs- und Querabmessungen der Stahlplatt-
chen von 62×44 mm wurden experimentell bestimmt. Die schubfeste Verbindung der
Stahlplattchen mit dem Holzprobekorper wird durch Verklebung mit Epoxidharzkleber
gewahrleistet.
• Die drei Lasteinleitungsbereiche pro Probenrand sind durch zwei 4 mm breite Schlitze
voneinander getrennt, zudem werden pro Seite je sechs weitere, kurze Schlitze ange-
bracht. Diese Maßnahme verhindert unerwunschte Kraftubertragungen zwischen den
unterschiedlichen Beanspruchungsrichtungen. Durch die Lange der Schlitze von 28 mm
bzw. 100 mm wird die wirksame Probenbreite auf 140 mm begrenzt (siehe Abbildung
2.3 (a)).
• Das dadurch mit 140×140 mm definierte Pruf- bzw. Messfeld weist je nach Bean-
spruchungsverhaltnis eine unterschiedliche Dicke t auf. Bei der Versuchsdurchfuhrung
wurde Typ A (t ≈ 4.5 mm) fur Zug- und gemischte Zug-Druck-Beanspruchungen, Typ
B (t ≈ 7.5 mm) fur reine Druck-Beanspruchungen und Typ C (t ≈ 9.5 mm) nur bei
vier Druckversuchen verwendet.
• Um Spannungs- und Verzerrungskonzentrationen in den Eckbereichen des Pruffeldes
zu vermeiden wird die Dicke in diesen Bereichen lokal auf 20 mm erhoht.
UH−1( )
UH+1( )
UH0( )
UV0( )UV
−1( ) UV+1( )
VV
VH
ϕ
X1
X1
X1
X1
X2
X2
X2
X2
UH−1( )
UH+1( )
UH0( )
VH
VV
UV0( ) UV
−1( )UV+1( )
DV
DV
DH
DH
44 44 44 44140
106210010 6228 28 3 3
2620
4525
045
100
140
100
340
100
Last-einleitungs-bereich
u1 u2 u3
v6
v5
v4
Last-einleitungs-punkte
t
plattchenStahl-
u4
u6
v8 = v
u5 = uu11 = u
v2 = vv1
v3
(a) (b)
1, u
2, v
ϕ
t
Ø14
+v
+u
Messbereich
21 3
4
5
6
8 79
10
11
12
Abbildung 2.3: (a) Abmessungen des Probekorpers, (b) Verschiebungsvorschrift
Page 12
Experimentelle Untersuchungen von Fichtenholz 2.1: Versuchseinrichtung 7
2.1.3 Mechanische Versuchsparameter
Anschließend an die Festlegung der Form des Probekorpers wurden biaxiale Verschiebungs-
vorschriften fur die zwolf Lasteinleitungspunkte entwickelt, die das Erreichen homogener
Beanspruchungszustande im Messfeld des Probekorpers gewahrleistet. Eine derartige Vor-
schrift ist in Abbildung 2.3 (b) dargestellt. Fur einen Faserwinkel ϕ 6= 0 ist die Vorgabe
einer Schubdeformation erforderlich, um eine horizontale bzw. vertikale Ausrichtung der re-
sultierenden Hauptspannungsrichtungen zu gewahrleisten.
Als Kenngroße fur eine Verschiebungsvorgabe dienen der Faserwinkel ϕ und das Verschie-
bungsverhaltnis
κ = u : v = u5 : v2 = u11 : v8 , (2.1)
wobei u die Verschiebungskomponente normal zum Rand der mittleren seitlichen Lastein-
leitungspunkte 5 und 11 und v die Verschiebungskomponente normal zum Rand der oberen
und unteren Lasteinleitungspunkte 2 und 8 bezeichnet.
Abbildung 2.3 (b) zeigt eine Verschiebungsvorschrift fur ein allgemeines biaxiales Beanspru-
chungsverhaltnis mit ϕ 6= 0.
Ein Kriterium, das von der Verschiebungsvorschrift einzuhalten ist, verlangt das Verschwin-
den von Schubkraften bzw. -spannungen entlang der Probekorperrander. Diese zusatzliche
Bedingung ist notwendig, da gleichformige Verschiebungszustande nur dann die erwunschten
homogenen Verzerrungs- bzw. Spannungsverteilungen im Messfeld erzeugen.
Mit Hilfe dieses Kriteriums ist es moglich, abhangig von der Faserrichtung ϕ und der Verhalt-
niszahl κ, die restlichen Verschiebungskomponenten der Lasteinleitungspunkte 1, 3, 4 und 6
bzw. 7, 9, 10 und 12 zu formulieren. Die entsprechenden Vorschriften sind in [5] zusammen-
gestellt.
Ein Verhaltnis κ = +1:0 bedeutet, dass u= 1 µm bzw. v = 0 µm betragt. u5 und v2 sind somit
definiert. Mit Hilfe des Faserwinkels ϕ und der Verschiebungsvorschrift sind die restlichen
Verschiebungen definiert. Durch Variation der Faserrichtungen ϕ = 0, 7.5, 15, 30 und
45 erhalt man die wesentlichsten Kombinationen von Langs- und Radialspannungen.
Durch geeignete Wahl des Beanspruchungsverhaltnisses κ erhalt man Festigkeitsdaten fur
alle Beanspruchungsbereiche der jeweiligen Faserrichtungen. Durch Bildung des Komple-
mentarwinkels ϕ′ des Faserwinkels und des Kehrwertes κ′ des Beanspruchungsverhaltnisses
erhalt man alle erganzenden, fur die mechanische Werkstoffmodellierung erforderlichen ex-
perimentellen Informationen.
Aufgrund der Aquivalenz zweier Versuchskonfigurationen mussten keine Versuche fur die
Faserrichtungen ϕ = 90, 82.5, 75 und 60 durchgefuhrt werden. Somit deckt man mit 439
Versuchen aufgrund der Symmetrie insgesamt 878 Versuchskonfigurationen ab.
Page 13
Experimentelle Untersuchungen von Fichtenholz 2.1: Versuchseinrichtung 8
2.1.4 Biaxiales Belastungssystem
Zur Gewahrleistung einer verschiebungskontrollierten Belastung der Probekorper dient eine
biaxiale Prufmaschine, die aus folgenden drei Subsystemen besteht (siehe Abbildungen 2.4
(a) und (b)):
• Servohydraulische Belastungseinrichtung:
Die Lasteinleitungsgabeln der 24 Belastungsachsen greifen paarweise an zwolf Last-
ubertragungsbolzen an. Diese Bolzen fixieren den Probekorper. Die 24 Belastungsach-
sen sind an Verankerungsblocken frei drehbar gelagert und ubertragen die aufgebrach-
ten Krafte auf vier, in den Eckbereichen eines Rahmensystems befindlichen Konsolen,
welche mit einer Doppelrahmenkonstruktion verbunden sind. Die gezielte Anderung
der Achsenlange der Belastungsachsen erfolgt mittels einer servohydraulischen Positio-
nierung des Zylinderkolbens.
Die im Zylindergehause jeder Belastungsachse eingebauten induktiven Wegaufnehmer
besitzen einen Nennmessweg von ± 5 mm. Die Positioniergenauigkeit der Hydrau-
likzylinder betragt ± 2.4 µm. An den Verbindungen der Belastungsachsen mit den
Verankerungsblocken sind je ein Kraftaufnehmer mit einer Nennlast von ± 20 kN und
einer Genauigkeit von ± 0.04 kN situiert. Mit den dargelegten Randbedingungen kann
pro Lasteinleitungspunkt eine Kraft von bis zu 24 kN ubertragen werden. Zur Krafter-
zeugung dient eine Kolbenpumpe mit einem Betriebsdruck von 210 bar.
• Elektronisches Mess- und Regelsystem:
Mittels eines Softwarepakets werden wichtige Aufgabenbereiche dieses Subsystems er-
fullt. Das Programmpaket uberwacht den Betriebszustand der Hydraulikanlage sowie
die Verschiebungskomponenten der zwolf Lasteinleitungspunkte.
• Computergestutztes Mess- und Steuerungssystem:
Das selbe Softwarepaket ist auch fur die positionsgeregelte Ablaufsteuerung eines Ver-
suches verantwortlich. Außerdem wird die Koordination mit dem optischen Deforma-
tionsmesssystem (siehe Abschnitt 2.1.5) zur Erreichung eines ordnungsgemaßen Ver-
suchsablaufes bewerkstelligt.
Ein Lastschritt dauert etwa 10 s und ist in vier Zeitabschnitte unterteilt. Nach dem Erreichen
der Soll-Positionen der 24 Hydraulikzylinder (≈ 350 ms) und dem Abklingen eventueller dy-
namischer Effekte (≈ 500 ms) beginnt der eigentliche Messvorgang. Eine variable Wartezeit
(zwischen 0.5-1.5 s) erganzt die angegebene Lastschrittdauer von 10 s.
Der Messvorgang beinhaltet die Messung und Speicherung der Ist-Positionen und der Ist-
Krafte der 24 Belastungsachsen, die Bestimmung des Kraft- und Verschiebungszustandes in
den zwolf Lasteinleitungspunkten und die digitale Aufnahme des Probekorpers zur spateren
Detailauswertung.
Page 14
Experimentelle Untersuchungen von Fichtenholz 2.1: Versuchseinrichtung 9
Das beschriebene Steuerungssystem ermoglicht die folgende Versuchsdurchfuhrung, welche
sich in drei aufeinander folgende Phasen gliedert:
• Einrichtphase:
Ziel der Einrichtphase ist es, die zwolf Lasteinleitungsbolzen ohne Vorschadigung des
Probekorpers in dessen Bohrungen einzufuhren. Es soll ein kraftefreier Initialzustand
des Probekorpers entstehen.
• Vorspannphase:
Mittels eines Vorspannzustandes soll erreicht werden, dass die mit der beweglichen La-
gerung der Belastungsachsen auftretenden Fertigungstoleranzen ausgeglichen werden.
Ziel der Vorspannphase ist die Definition eines Startzustandes unter Berucksichtigung
der wahrend der Belastungsphase aufgebrachten Beanspruchung.
• Belastungsphase:
Die Belastungsphase entspricht der eigentlichen Versuchsdurchfuhrung. Die Beanspru-
chung des Probekorpers erfolgt deformationsgesteuert durch Vorgabe einer Folge von
Verschiebungsinkrementen ui und vi in den zwolf diskreten Lasteinleitungspunkten des
Probekorpers. Diese schrittweise biaxiale Beanspruchung, entsprechend den Versuchs-
parametern, wird solange fortgesetzt, bis Materialversagen eintritt.
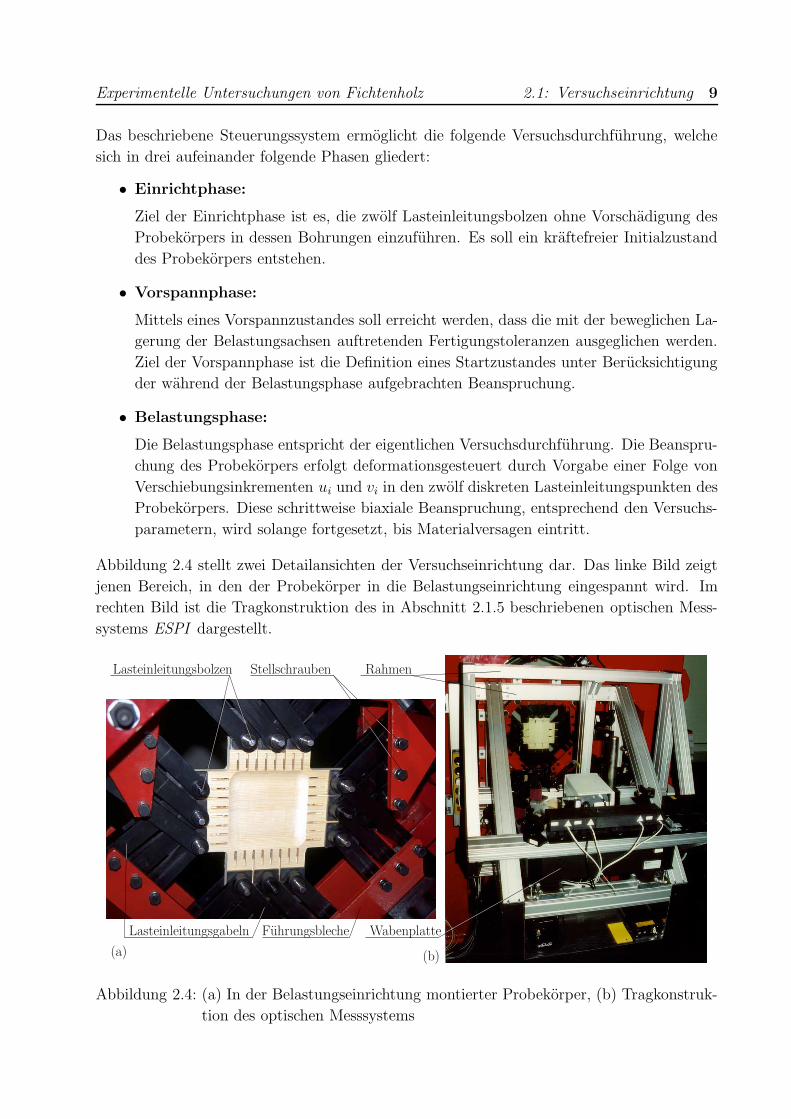
Abbildung 2.4 stellt zwei Detailansichten der Versuchseinrichtung dar. Das linke Bild zeigt
jenen Bereich, in den der Probekorper in die Belastungseinrichtung eingespannt wird. Im
rechten Bild ist die Tragkonstruktion des in Abschnitt 2.1.5 beschriebenen optischen Mess-
systems ESPI dargestellt.
Lasteinleitungsbolzen Stellschrauben
Lasteinleitungsgabeln Fuhrungsbleche
(a) (b)
Wabenplatte
Rahmen
Abbildung 2.4: (a) In der Belastungseinrichtung montierter Probekorper, (b) Tragkonstruk-
tion des optischen Messsystems
Page 15
Experimentelle Untersuchungen von Fichtenholz 2.1: Versuchseinrichtung 10
2.1.5 Dreidimensionale Deformationsanalyse
Die Deformationsanalyse wird mittels des ESPI-Messsystems (Electronic Speckle Pattern
Interferometry) durchgefuhrt. Dieses optische Messverfahren hat folgende Vorteile:
• Die Messung ist mehrdimensional. Neben einer Horizontal- und Vertikalmessung wird
auch die Verschiebung normal zur Messebene gemessen. Die quantitative Ermittlung
des Verzerrungszustandes erfolgt durch zweidimensionale Deformationsmessungen und
anschließende numerische Differentation der digitalisierten Messdaten.
• Die Messung ist beruhrungslos. Aufgrund der geringen Materialsteifigkeit von Holz
normal zur Faserrichtung mussen Wechselwirkungen zwischen Messgerat und -objekt
vermieden werden.
• Die Messung ist flachenhaft. Um die Homogenitat der Verzerrungsverteilungen zu be-
urteilen, ist der Einsatz von Punktmessverfahren ungeeignet.
• Die Messgenauigkeit betragt ≈ ± 2 µm. Die Genauigkeit des Messsystems muss hoher
als die Positionierungsgenauigkeit der Belastungseinrichtung sein, um Homogenitat der
Messdaten zu gewahrleisten.
• Die Messung lauft in Echtzeit ab. Nach Entnahme aus der Klimakammer muss der
Probekorper innerhalb einer Stunde gepruft werden. Die Serienmessung und Messda-
tenauswertung erfolgt computerunterstutzt, wodurch der Zeitaufwand gering gehalten
wird.
Als Nachteile des ESPI-Messsystems werden die Empfindlichkeit gegenuber Schwingungen
und Warme sowie die Kosten der Anschaffung gegenuber anderen Messsystemen genannt.
Das Messsystem ist aufgrund der Empfindlichkeit nur mittels einer schwingungsdampfenden
Wabenplatte (siehe Abbildung 2.4 (b)) an der Tragkonstruktion montiert.
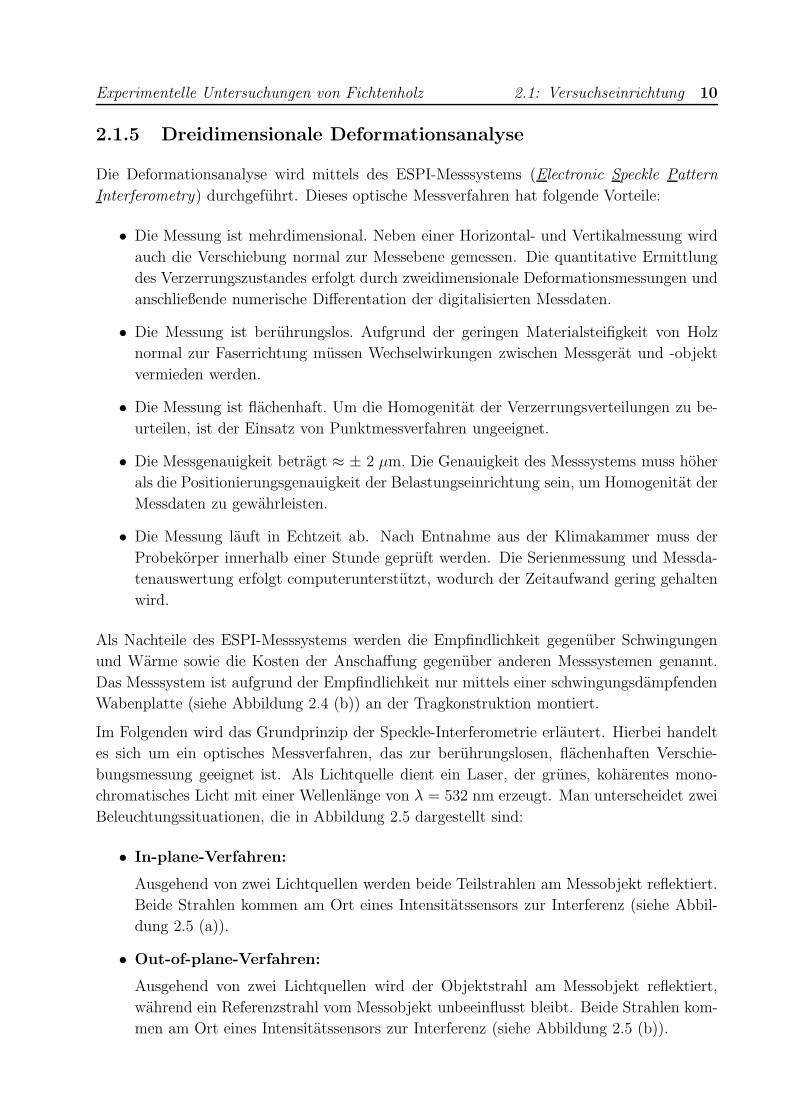
Im Folgenden wird das Grundprinzip der Speckle-Interferometrie erlautert. Hierbei handelt
es sich um ein optisches Messverfahren, das zur beruhrungslosen, flachenhaften Verschie-
bungsmessung geeignet ist. Als Lichtquelle dient ein Laser, der grunes, koharentes mono-
chromatisches Licht mit einer Wellenlange von λ = 532 nm erzeugt. Man unterscheidet zwei
Beleuchtungssituationen, die in Abbildung 2.5 dargestellt sind:
• In-plane-Verfahren:
Ausgehend von zwei Lichtquellen werden beide Teilstrahlen am Messobjekt reflektiert.
Beide Strahlen kommen am Ort eines Intensitatssensors zur Interferenz (siehe Abbil-
dung 2.5 (a)).
• Out-of-plane-Verfahren:
Ausgehend von zwei Lichtquellen wird der Objektstrahl am Messobjekt reflektiert,
wahrend ein Referenzstrahl vom Messobjekt unbeeinflusst bleibt. Beide Strahlen kom-
men am Ort eines Intensitatssensors zur Interferenz (siehe Abbildung 2.5 (b)).
Page 16
Experimentelle Untersuchungen von Fichtenholz 2.2: Versuchsauswertung 11
(a) (b)Messobjekt Messobjekt
Objektwelle
Referenzwelle
Objektw
elle 2Objektwelle 1
Abbildung 2.5: (a) In-plane-Verfahren, (b) Out-of-plane-Verfahren
Das grundsatzliche Messprinzip aller interferometrischer Verfahren lasst sich anhand des Mi-
chelson-Interferometers erlautern. Eine kontinuierliche Verschiebung des Messobjekts in
Richtung des Objektstrahls fuhrt zu einer Verkurzung des Lichtweges und damit zu einer
Anderung der Phasenbeziehung der beiden Teilstrahlen. Sie außert sich im Auftreten ab-
wechselnder Intensitatsmaxima und -minima am Intensitatssensor. Der Wechsel von einem
zum nachsten gleichartigen Interferenzzustand entspricht einer Verschiebung u des Messob-
jekts um eine halbe Lichtwellenlange λ.
Es sind drei Messrichtungen zur Messung dreidimensionaler Deformationszustande erforder-
lich, die mittels vier verschiedener Beleuchtungsquellen und einem Detektor realisiert werden.
Es sind dies zwei In-plane- sowie eine Out-of-plane-Messrichtung.
Die Out-of-plane-Messrichtung dient zur Messung der Dickenanderung des Probekorpers
bzw. zur Bestimmung des raumlichen Verschiebungszustandes an der Messoberflache.
Die Darstellung von Speckle-Interferogrammen in Form von Streifenbildern wird durch ein
Programmpaket ermoglicht. Durch Anwendung von Bildverarbeitungsfiltern werden die er-
haltenen Phasenbilder deutlich verbessert.
2.2 Grundlagen der Versuchsauswertung
Im folgenden Unterkapitel wird beschrieben, wie aus den Versuchsdaten Verzerrungs- und
Spannungsinkremente bzw. biaxiale Festigkeiten fur jeden biaxialen Holzversuch ermittelt
werden.
• Bestimmung der Verzerrungen:
Aus den mit Hilfe des ESPI-Systems gemessenen Verschiebungsfeldern ermittelt das
in Abschnitt 2.1.4 beschriebene Softwarepaket mittels numerischer Differentation den
Verlauf der Verzerrungskomponenten. Des Weiteren werden mittels geeigneter Mittel-
wertbildung die fur die Entwicklung biaxialer Werkstoffgesetze notwendigen mittleren
Verzerrungskomponenten ε11, ε22 und γ12 ermittelt. Diese Vorgangsweise ist fur jeden
Lastschritt aller Einzelversuche durchzufuhren.
Page 17
Experimentelle Untersuchungen von Fichtenholz 2.2: Versuchsauswertung 12
• Bestimmung der Spannungen:
Mittels der vom hydraulischen Belastungssystem gelieferten Krafte und der Einfuhrung
einer effektiven Querschnittsflache werden unter Vernachlassigung der Kraftkomponen-
ten parallel zum jeweiligen Probekorperrand die Mittelwerte der Normalspannungen
σ11 und σ22 ermittelt.
• Bestimmung der biaxialen Festigkeiten:
Durch Bestimmung jenes Belastungsschrittes, bei dem die erste Materialschadigung
aufgetreten ist, wird durch dessen zugehorigen Normalspannungen σ11 und σ22 die
biaxiale Festigkeit festgelegt. Als Kriterium fur einen Bruchpunkt bzw. der biaxialen
Festigkeit dient der erste auftretende Extremwert im Spannungsverlauf der Spannungs-
komponenten σ11 und σ22.
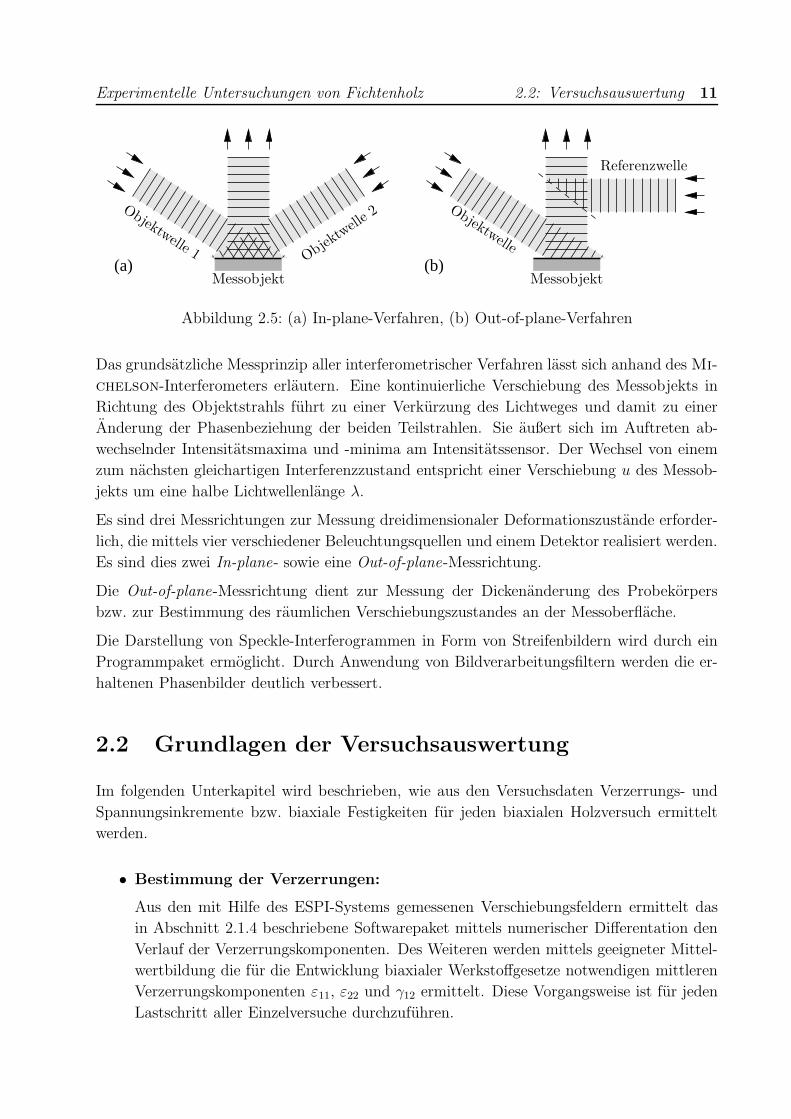
• Arten von Bruchverlaufen:
Die Rissausbreitung erfolgt im Allgemeinen in Faserrichtung und fuhrt so zu einem
Spaltbruch des Probekorpers. Bei dominierender Beanspruchung parallel zur Faser
treten hingegen Splitterbruche auf. Abbildung 2.6 (a) stellt ein Beispiel fur einen
Spaltbruch dar (ϕ=15/κ=+1:0). Abbildung 2.6 (b) zeigt ein Beispiel fur einen Split-
terbruch (ϕ=0 und κ=+1:0).
Von den 439 Versuchen wurden 423 mit proportionaler Belastung durchgefuhrt. Die 16
restlichen Versuche entsprachen Versuchsdurchfuhrungen mit nichtproportionaler Beanspru-
chungsgeschichte. Bei diesen Versuchen folgten einer proportionalen Teilbelastung mehrere
Zyklen mit teilweiser Ent- und Wiederbelastung. Insgesamt wurden 76 unterschiedliche
Versuchskonfigurationen untersucht, die sich durch funf verschiedene Faserwinkel ϕ und 25
verschiedene Belastungskombinationen κ auszeichnen.
Abbildung 2.6: (a) Spaltbruch bzw. (b) Splitterbruch eines Probekorpers
Die experimentellen Untersuchungen von fehlerfreiem Fichtenholz unter biaxialer Beanspru-
chung lassen sich in funf Diagrammen darstellen. Jedes Diagramm gilt fur einen bestimm-
ten Faserwinkel ϕ und fasst die biaxialen Festigkeiten fur alle Beanspruchungsverhaltnisse
κ zusammen. Die Bruchpunkte liegen jeweils auf gedachten Bruchkurven mit annahernd
elliptischer Form. Die Hauptachsen dieser Ellipsen sind etwa um den Winkel ϕ zu den
Spannungshauptachsen verdreht. Die aus den Versuchen ermittelten Diagramme sind in [5]
dargestellt und im Unterkapitel 6.3 wiedergegeben.
Page 18
Experimentelle Untersuchungen von Fichtenholz 2.3: Uniaxiale Zugversuche 13
2.3 Uniaxiale Zugversuche
In Erganzung zu den biaxialen Versuchen wurden uniaxiale Versuche mit jenem Holz durch-
gefuhrt, aus dem die biaxialen Probekorper hergestellt wurden. Ziel dieser Versuche war
es, die elastischen Werkstoffkennwerte (EL, ER und νLR) und die einaxialen Zugfestigkeiten
(βt,⊥ und βt,‖) zu ermitteln.
Da die Lagerung der Proben analog zu jener der Proben fur die biaxialen Versuche erfolgte,
war nur die Abhangigkeit der Versuchsergebnisse von der Rohdichte zu berucksichtigen.
Insgesamt wurden 300 Einzelversuche durchgefuhrt, wobei drei unterschiedliche Versuchs-
konfigurationen unterschieden wurden:
• Konfiguration zur Bestimmung des rohdichtebezogenen Elastizitatsmoduls EL und der
einaxialen Zugfestigkeiten βt,‖ und βt,⊥
• Konfiguration zur Bestimmung des rohdichtebezogenen Elastizitatsmoduls ER und der
einaxialen Zugfestigkeiten βt,‖ und βt,⊥
• Konfiguration zur Bestimmung der rohdichtebezogenen Querdehnungszahl νLR und der
einaxialen Zugfestigkeiten βt,‖ und βt,⊥
Die Probekorperform der drei Konfigurationen war dem jeweiligen Zweck angepasst. Details
dazu sind Pulay [20] und Eberhardsteiner [5] zu entnehmen. Pro Versuchskonfiguration
wurden 100 Versuche durchgefuhrt.
Die elastischen Materialkennwerte EL, ER und νLR wurden aus den linearen Bereichen der
Spannungs-Dehnungsbeziehungen in Abhangigkeit von der Rohdichte ρ bestimmt. Fur die
funf Werkstoffkennwerte wurden schließlich statistische Analysen in Form einer linearen Re-
gression pro Werkstoffkenngroße durchgefuhrt. Die daraus erhaltenen Beziehungen fur die
elastischen Materialparameter sind in den Gleichungen (2.2a) bis (2.2c) zusammengefasst
[5]:
E∗L(ρ) = (3.82 + 21.8 ρ) · 1000 N/mm2 (2.2a)
E∗R(ρ) = (−0.14 + 2.02 ρ) · 1000 N/mm2 (2.2b)
ν∗LR(ρ) = 0.45 + 0.112 ρ (2.2c)
Die Rohdichte ρ ist dabei in g/cm3 einzusetzen.
Die linearen Regressionen der Elastizitatsmoduli geben die bei Holz zu erwartenden rela-
tiv starken Streuungen wieder [8]. Die Regressionsformel fur die Querdehnungszahl lasst
aufgrund der hohen Streuung der Versuche keine große Abhangigkeit von der Rohdichte
erkennen (siehe [5], [7] und [20]).
Page 19
Experimentelle Untersuchungen von Fichtenholz 2.4: Analyse der Bruchversuche 14
2.4 Analyse der biaxialen Bruchversuche
Der orthotrope Werkstoff Holz ist durch sehr unterschiedliche Steifigkeiten in Faserrichtung
und quer zur Faserrichtung gekennzeichnet. Die biaxialen Versuche wurden fur den Sonder-
fall von scheibenformigen, aus der LR-Ebene eines Stammes herausgeschnittenen Holzpro-
ben durchgefuhrt. Bei der aufgebrachten Beanspruchung handelt es sich um einen ebenen
Spannungszustand.
In diesem Unterkapitel werden prinzipielle Aussagen daruber getroffen, wie fehlerfreies Holz
unter verschiedenen Beanspruchungsverhaltnissen versagt und wie dieses Verhalten zu mo-
dellieren ist. Durch Analyse der Spannungs-Verzerrungs-Beziehungen fur verschiedene Be-
anspruchungsverhaltnisse entkennt man vier Grundarten des Versagens, die im Folgenden
erlautert werden (siehe Mackenzie-Helnwein et al. [12]):
• Sprodes Zug- und Schubversagen quer zur Faserrichtung:
Diese Beanspruchungsart fuhrt zu dem in Abbildung 2.4 (a) dargestellten Spaltbruch.
Es entsteht ein zur Faserrichtung paralleler Riss. Diese Versagensart tritt bei allen
Faserwinkeln ϕ auf.
• Duktiles Verhalten unter Druck quer zur Faserrichtung:
Diese Art entspricht einem Verhalten, das sehr ahnlich dem Verfestigungsbereich me-
tallischer Werkstoffe unter plastischer Beanspruchung ist. Druckbeanspruchung, die
exakt normal zur Faserrichtung wirkt, verursacht keine Entfestigung. Auf makrosko-
pischer Ebene treten homogene Verzerrungszustande auf. Auf mikroskopischer Ebene
tritt die inelastische Verformung hingegen nur in einzelnen Zellenreihen auf.
• Sprodes Zugversagen in Faserrichtung:
Diese Art erzeugt den in Abbildung 2.4 (b) dargestellten Splitterbruch und stellt eine
Kombination von Faserriss und Schubversagen entlang der Jahrringgrenzen dar. Außer-
dem treten große Streuungen der biaxialen Festigkeit bei uberwiegender Zugbeanspru-
chung in Faserrichtung auf. Die elliptische Bruchkurve nach [5] tendiert in diesem
Bereich zu einer Uberschatzung der Zugfestigkeit in Faserrichtung. Diese Versagensart
tritt ausnahmslos bei kleinen Faserwinkeln ϕ auf.
• Druckversagen in Faserrichtung:
Durch diese Beanspruchung entstehen Bander gestauchter Zellen. Dadurch treten ini-
tiale Festigkeitsverluste von etwa 20 % der ursprunglichen Druckfestigkeit auf.
Bei großen Stauchungen zeigt sich bei den Versagensarten mit Druckbeanspruchung ein
Phanomen, das in weiterer Folge als Kompaktion bezeichnet wird. Durch Kompaktion steigt
die Festigkeit, wobei das Material nahezu inkompressibel wird. Dieses Phanomen konnte bei
den biaxialen Versuchen wegen der Beschrankung auf kleine Verzerrungen nicht beobachtet
werden.
Page 20
Experimentelle Untersuchungen von Fichtenholz 2.5: Grundlagen zur Simulation 15
2.5 Grundlagen zur Simulation der biaxialen Bruch-
versuche
In diesem Unterkapitel werden die Versuchsdaten der Einzelversuche fur die Versuchssimula-
tion aufbereitet. In Abschnitt 2.5.1 wird erlautert, wie der totale Verzerrungszustand jedes
Einzelversuchs ermittelt wird, da dieser wegen der erforderlichen Vorspannung der Proben
nicht bekannt ist. In Abschnitt 2.5.2 werden mittels charakteristischer Versuchsdaten die in
Unterkapitel 2.4 beschriebenen vier Versagensmechanismen gemaß [12] veranschaulicht.
2.5.1 Bestimmung des initialen Verzerrungszustandes
Da der mit dem Vorspannungszustand korrespondierende Verzerrungszustand bei den biaxia-
len Versuchen nicht bekannt ist, empfiehlt es sich, einen initialen Verzerrungszustand aus dem
initialen Spannungszustand und dem elastischen Gesetz ruckzurechnen.
Es darf angenommen werden, dass dieser initiale Zustand nach wie vor im linear elastischen
Bereich liegt. Man kann deshalb bei bekanntem Spannungszustand den dabei auftreten-
den Verzerrungszustand aus dem verallgemeinerten Hooke’schen Gesetz ermitteln. Das
liefert den gesuchten initialen Verzerrungszustand. Mit Hilfe dessen erhalt man Spannungs-
Verzerrungs-Kurven, die im Koordinatenursprung beginnen.
Dazu werden die Verzerrungskomponenten ε11, ε22 und γ12 mittels linearer Regression uber
etwa 5 bis 20 Lastinkremente wie folgt ersetzt:
εij = aij + bij t , (2.3)
wobei aij jene Dehnung ist, die nach dem ersten Lastschritt berechnet wurde, bij ist die Stei-
gung der Regressionsgeraden und t ist ein Zeitparameter, welcher mit der laufenden Nummer
im Datensatz gleichgesetzt wird. Abbildung 2.7 (a) veranschaulicht die lineare Regression
nach (2.3). Die im Zuge der Regressionsrechnung zu minimierenden Fehlerquadratsummen
erhalt man zu:
Eij =1
2
n∑
k=1
(ε(k)ij − aij − bij tk)
2 , (2.4)
wobei n die Anzahl der zu berucksichtigenden Messpunkte bezeichnet und tk = k gesetzt
wird. Diese Anzahl ist individuell fur jeden Versuch zu wahlen.
Die Gleichungen (2.3) und (2.4) sind getrennt fur ij ∈ LL,RR, LR zu formulieren.
In [5] werden die Spannungs-Verzerrungs-Beziehungen aller Einzelversuche fur die betrags-
maßig großere Spannung dargestellt. Fur die Berechnung des initialen Verzerrungszustandes
jedes Einzelversuches werden deshalb die betragsmaßig großeren Spannungen herangezogen.
Page 21
Experimentelle Untersuchungen von Fichtenholz 2.5: Grundlagen zur Simulation 16
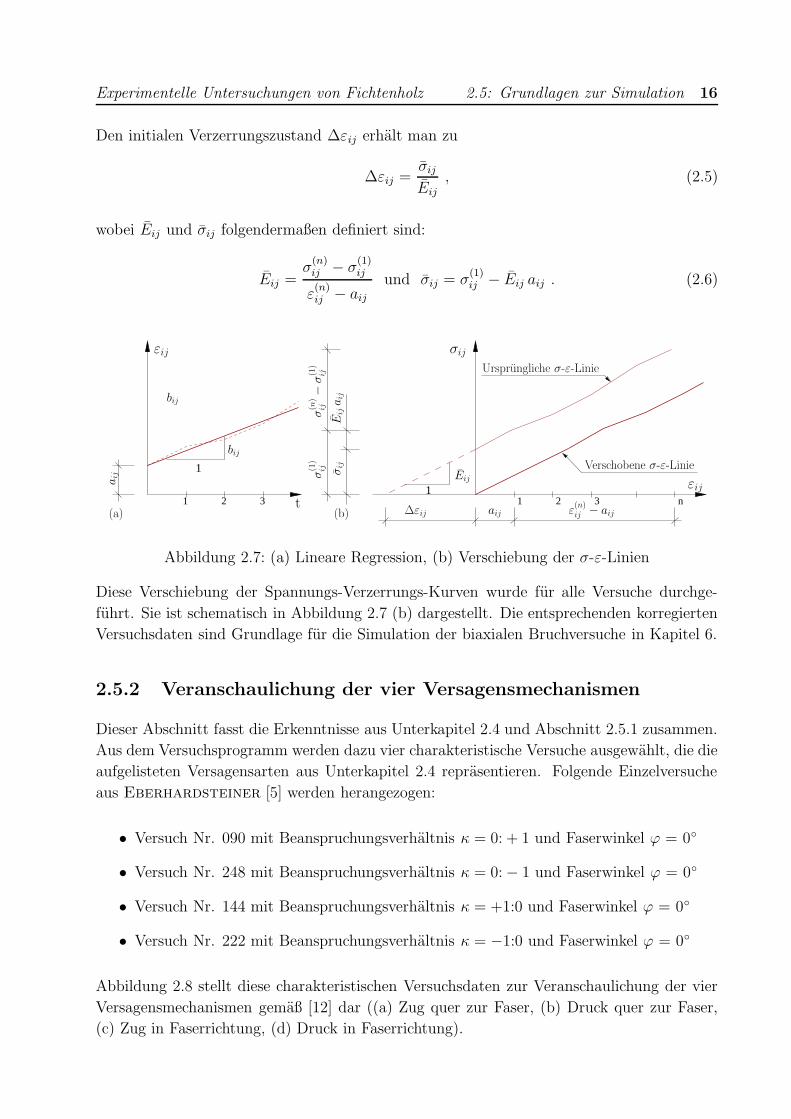
Den initialen Verzerrungszustand ∆εij erhalt man zu
∆εij =σij
Eij
, (2.5)
wobei Eij und σij folgendermaßen definiert sind:
Eij =σ
(n)ij − σ
(1)ij
ε(n)ij − aij
und σij = σ(1)ij − Eij aij . (2.6)
1 2 3 n1 2 3
1
1
∆εij ε(n)ij − aij
Eij
aij
Verschobene σ-ε-Linie
σij
aij
σij
εij
σ(1
)ij
σ(n
)ij
−σ
(1)
ij
εij
aij
t
bij
Eij
Ursprungliche σ-ε-Linie
bij
(a) (b)
Abbildung 2.7: (a) Lineare Regression, (b) Verschiebung der σ-ε-Linien
Diese Verschiebung der Spannungs-Verzerrungs-Kurven wurde fur alle Versuche durchge-
fuhrt. Sie ist schematisch in Abbildung 2.7 (b) dargestellt. Die entsprechenden korregierten
Versuchsdaten sind Grundlage fur die Simulation der biaxialen Bruchversuche in Kapitel 6.
2.5.2 Veranschaulichung der vier Versagensmechanismen
Dieser Abschnitt fasst die Erkenntnisse aus Unterkapitel 2.4 und Abschnitt 2.5.1 zusammen.
Aus dem Versuchsprogramm werden dazu vier charakteristische Versuche ausgewahlt, die die
aufgelisteten Versagensarten aus Unterkapitel 2.4 reprasentieren. Folgende Einzelversuche
aus Eberhardsteiner [5] werden herangezogen:
• Versuch Nr. 090 mit Beanspruchungsverhaltnis κ = 0: + 1 und Faserwinkel ϕ = 0
• Versuch Nr. 248 mit Beanspruchungsverhaltnis κ = 0: − 1 und Faserwinkel ϕ = 0
• Versuch Nr. 144 mit Beanspruchungsverhaltnis κ = +1:0 und Faserwinkel ϕ = 0
• Versuch Nr. 222 mit Beanspruchungsverhaltnis κ = −1:0 und Faserwinkel ϕ = 0
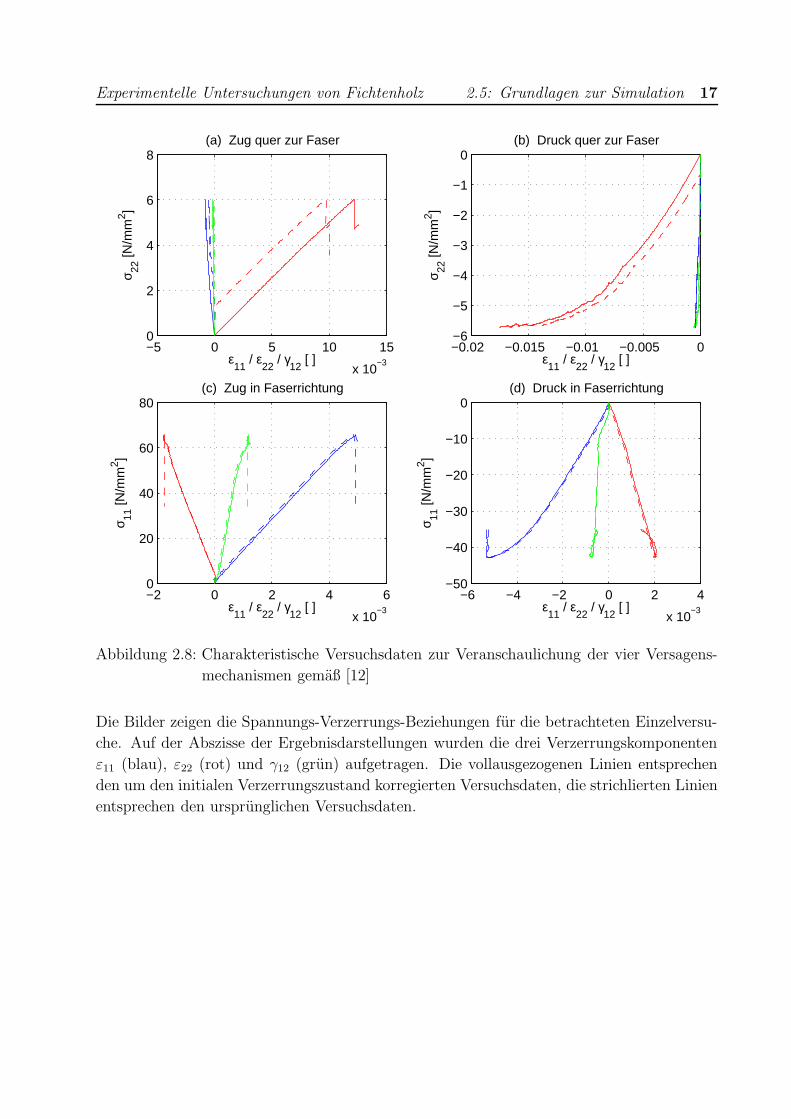
Abbildung 2.8 stellt diese charakteristischen Versuchsdaten zur Veranschaulichung der vier
Versagensmechanismen gemaß [12] dar ((a) Zug quer zur Faser, (b) Druck quer zur Faser,
(c) Zug in Faserrichtung, (d) Druck in Faserrichtung).
Page 22
Experimentelle Untersuchungen von Fichtenholz 2.5: Grundlagen zur Simulation 17
−5 0 5 10 15
x 10−3
0
2
4
6
8
ε11
/ ε22
/ γ12
[ ]
σ 22 [N
/mm
2 ](a) Zug quer zur Faser
−0.02 −0.015 −0.01 −0.005 0−6
−5
−4
−3
−2
−1
0
ε11
/ ε22
/ γ12
[ ]
σ 22 [N
/mm
2 ]
(b) Druck quer zur Faser
−2 0 2 4 6
x 10−3
0
20
40
60
80
ε11
/ ε22
/ γ12
[ ]
σ 11 [N
/mm
2 ]
(c) Zug in Faserrichtung
−6 −4 −2 0 2 4
x 10−3
−50
−40
−30
−20
−10
0
ε11
/ ε22
/ γ12
[ ]
σ 11 [N
/mm
2 ]
(d) Druck in Faserrichtung
Abbildung 2.8: Charakteristische Versuchsdaten zur Veranschaulichung der vier Versagens-
mechanismen gemaß [12]
Die Bilder zeigen die Spannungs-Verzerrungs-Beziehungen fur die betrachteten Einzelversu-
che. Auf der Abszisse der Ergebnisdarstellungen wurden die drei Verzerrungskomponenten
ε11 (blau), ε22 (rot) und γ12 (grun) aufgetragen. Die vollausgezogenen Linien entsprechen
den um den initialen Verzerrungszustand korregierten Versuchsdaten, die strichlierten Linien
entsprechen den ursprunglichen Versuchsdaten.
Page 23
Kapitel3Beschreibung des elastischen
Bereiches
Die Beschreibung des mechanischen Verhaltens von Holz erfolgt im Rahmen der Elasti-
zitatstheorie mit Hilfe des verallgemeinerten Hooke’schen Gesetzes. Dieses Kapitel enthalt
Untersuchungen der Versuche im elastischen Bereich, wobei die Berechnung der elastischen
Materialparameter mittels den Spannungs- und Verzerrungsinkrementen der Einzelversuche
angestrebt wird.
3.1 Ausgangszustand und Problemstellung
Die experimentellen Untersuchungen wurden auf der Grundlage einer kontinuumsmechani-
schen Betrachtungsweise mittels des verallgemeinerten Hooke’schen Gesetzes fur orthotrope
Werkstoffe und der Beschrankung auf ebene biaxiale Beanspruchung durchgefuhrt. Aus den
dargelegten Bedingungen erhalt man das fur die Materialhauptrichtungen L und R geltende
linear elastische Spannungs-Verzerrungs-Gesetz zu
dεL
dεR
dγLR
=
1EL
−νRLER
0
−νLREL
1ER
0
0 0 1GLR
︸ ︷︷ ︸
= D
·
dσL
dσR
dτLR
, (3.1)
wobei differentielle Großen betrachtet werden. Die 3×3-Matrix ist die Nachgiebigkeitsmatrix
D. Sie wird mittels funf elastischer Parameter beschrieben. Unter der Voraussetzung der
Existenz eines elastischen Potentials folgt die Symmetrie des Elastizitatstensors C = D−1.
Dadurch ergibt sich:
νLRER = νRLEL . (3.2)
Page 24
Elastischer Bereich 3.1: Ausgangszustand und Problemstellung 19
Damit reduziert sich die Anzahl unabhangiger elastischer Konstanten auf vier. Mit der
Annahme, dass die Schubverzerrungen zufolge reinen Schubs bei einer Drehung des Koordi-
natensystems um die Stammlangsachse (Achse T , siehe Abbildung 2.2) invariant sind, erhalt
man nach Lekhnitskij [9] folgende zusatzliche Beziehung:
GLR =ELER
EL + ER + 2 νLRER
. (3.3)
Unter dieser Annahme verbleiben nur mehr drei unabhangige Materialparameter EL, ER und
νLR in dem in Gleichung (3.1) angegebenen ebenen Spannungs-Verzerrungs-Zusammenhang.
Der Werkstoff Holz besitzt initial linear elastische Eigenschaften im Zug- und im Druckbe-
reich.
Der Elastizitatstensor ergibt sich aus C = D−1. In Matrizenschreibweise entspricht C einer
3×3-Matrix. Die folgende Darstellung gilt fur ein Koordinatensystem, welches mit den
Materialhauptachsen ubereinstimmt:
C =
EL∆
νLR ER∆ 0
νLR ER∆
ER∆ 0
0 0 GLR
, (3.4)
wobei ∆ = 1 − νLR νRL und (3.3) fur GLR gelten. Wie in Kapitel 2 angegeben, wurden fur
alle Versuche die Spannungs-Verzerrungs-Beziehungen ermittelt. Um ein Materialmodell fur
Holz im elastischen Bereich zu erhalten, ist es erforderlich, die elastischen Materialparameter
aus den nun bekannten Spannungs- und Verzerrungsinkrementen zu ermitteln. In [5] sind
zwei unterschiedliche Falle zur Losung dieser Aufgabe erlautert:
1. Bei Betrachtung des allgemeinen Falls (ϕ 6= 0) waren die Beziehungen (3.1) nach
den Materialparametern losbar. Dieses Gleichungssystem ist aber aufgrund der unter-
schiedlichen Steifigkeiten in den Materialhauptrichtungen (EL/ER ≈ 20) numerisch
sehr schlecht konditioniert. Geringfugige Fehler bei der Ermittlung der Spannungs-
und Verzerrungskomponenten (≈ 2 % Fehler) fuhren zu betrachtlichen Abweichungen
bei der Bestimmung der Materialparameter (≈ 100 % Fehler).
2. Bei Betrachtung des Sonderfalls koinzidierender Material- und Beanspruchungshaupt-
achsen (ϕ = 0) entfallt aufgrund der schubspannungsfreien Beanspruchung die dritte
Gleichung der Beziehung (3.1). Dadurch erhalt man zwei Gleichungen fur drei unbe-
kannte Materialparameter EL, ER und νLR.
Eine mogliche Losung des Problems bietet die Kombination der Versuchsergebnisse aus den
biaxialen Versuchen mit den Ergebnissen der in Unterkapitel 2.3 beschriebenen uniaxia-
len Zugversuche. Mittels der Regressionsgleichungen (2.2a) bis (2.2c) konnen Relationen
zwischen diesen Materialparametern abgeleitet werden und als zusatzliche Beziehungen zur
Ermittlung derselben berucksichtigt werden.
Page 25
Elastischer Bereich 3.2: Beispiel zur Ermittlung der Materialparameter 20
Im folgenden Unterkapitel soll ein Beispiel zur Ermittlung der elastischen Materialparameter
die erlauterten Probleme aufzeigen. Im darauf folgenden Unterkapitel werden die Varianten
zur Losung dieser Aufgabe vorgestellt und ausfuhrlich diskutiert.
3.2 Beispiel zur Ermittlung der Materialparameter
Ausgehend von einem Verzerrungszustand εid, dessen Komponenten proportional zunehmen,
werden mittels dem verallgemeinerten Hooke’schen Gesetz
σ = C : εid (3.5)
und C aus (3.4) die zugehorigen Spannungen berechnet. Die unabhangigen elastischen Ma-
terialparameter werden dabei als
EL = 12000 N/mm2, ER = 700 N/mm2 und νLR = 0.50 (3.6)
angenommen. Diese Werte stellen Durchschnittswerte von fehlerfreiem Fichtenholz dar. Sie
wurden unter Berucksichtigung der Streuungsbereiche fur die einzelnen Materialparameter
EL ≈ 10000 − 15000 N/mm2, ER ≈ 600 − 1000 N/mm2 und νLR ≈ 0.40 − 0.80 (3.7)
gewahlt. Diese Streuungsbereiche ergeben sich aus den linearen Regressionen (2.2a) bis
(2.2c) bzw. aus den in [5] dargestellten Ergebnissen der uniaxialen Versuche. Der ideale
Verzerrungszustand erreicht den Maximalverzerrungszustand
max εid = b0.005 0.005 − 0.005cT (3.8)
nach 50 Lastschritten. Somit sind 3 × 50 Messergebnisse erforderlich. Durch die Annahme
einer Messgenauigkeit von ± 2 % bei der Verschiebungsmessung und der anschließenden
Berechnung der Verzerrungen tritt bei jeder dieser insgesamt 150 Messungen eine Fehler-
funktion δ auf. Den daraus resultierenden realen Verzerrungspfad erhalt man zu
εk =
εL,k
εR,k
γLR,k
=
εidL,k ± δ
εidR,k ± δ
γidLR,k ± δ
, (3.9)
wobei δ = 0.02 ‖ max εid ‖ den maximalen Fehler pro Messung beschreibt. δ betragt somit
0.000173. Die zuvor ermittelten Spannungen σ werden hingegen nicht verandert.
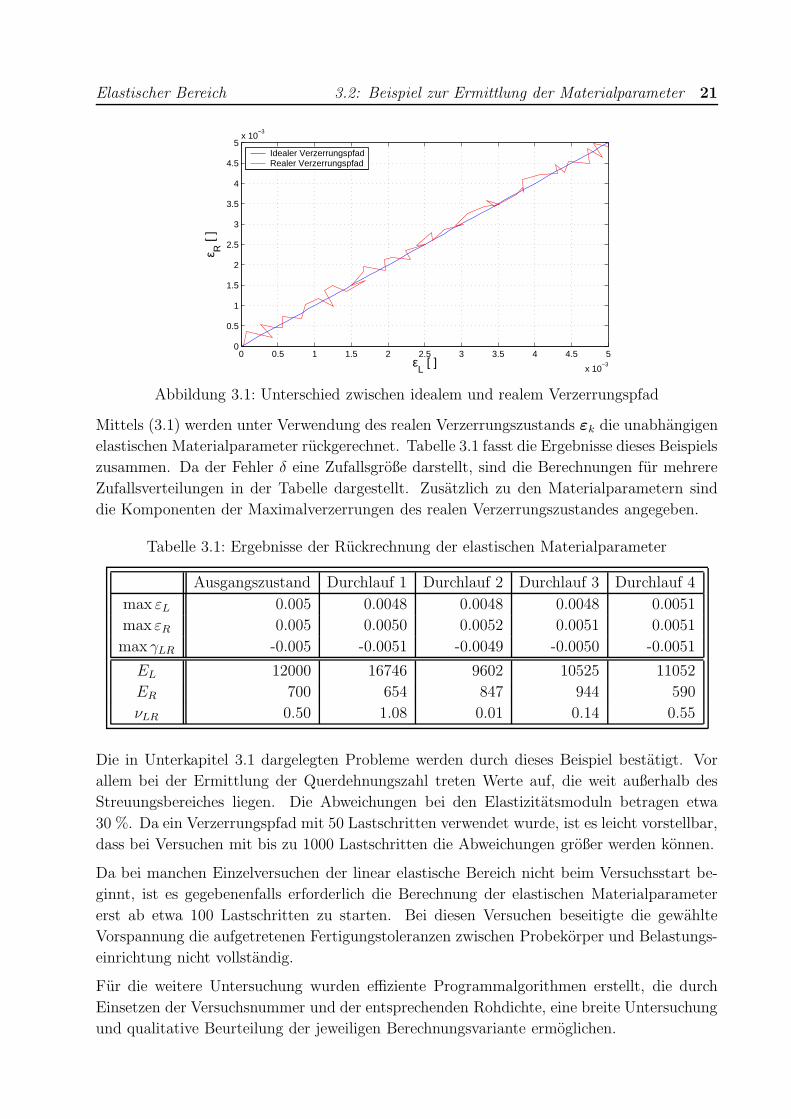
Abbildung 3.1 veranschaulicht den Unterschied zwischen idealem und realem Verzerrungs-
pfad fur die Komponenten εL und εR fur eine der moglichen Zufallsverteilungen. Der Ver-
zerrungspfad wird in der εL-εR-Ebene aufgetragen.
Page 26
Elastischer Bereich 3.2: Beispiel zur Ermittlung der Materialparameter 21
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
x 10−3
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
5x 10
−3
εL [ ]
ε R [
]
Idealer VerzerrungspfadRealer Verzerrungspfad
Abbildung 3.1: Unterschied zwischen idealem und realem Verzerrungspfad
Mittels (3.1) werden unter Verwendung des realen Verzerrungszustands εk die unabhangigen
elastischen Materialparameter ruckgerechnet. Tabelle 3.1 fasst die Ergebnisse dieses Beispiels
zusammen. Da der Fehler δ eine Zufallsgroße darstellt, sind die Berechnungen fur mehrere
Zufallsverteilungen in der Tabelle dargestellt. Zusatzlich zu den Materialparametern sind
die Komponenten der Maximalverzerrungen des realen Verzerrungszustandes angegeben.
Tabelle 3.1: Ergebnisse der Ruckrechnung der elastischen Materialparameter
Ausgangszustand Durchlauf 1 Durchlauf 2 Durchlauf 3 Durchlauf 4
max εL 0.005 0.0048 0.0048 0.0048 0.0051
max εR 0.005 0.0050 0.0052 0.0051 0.0051
max γLR -0.005 -0.0051 -0.0049 -0.0050 -0.0051
EL 12000 16746 9602 10525 11052
ER 700 654 847 944 590
νLR 0.50 1.08 0.01 0.14 0.55
Die in Unterkapitel 3.1 dargelegten Probleme werden durch dieses Beispiel bestatigt. Vor
allem bei der Ermittlung der Querdehnungszahl treten Werte auf, die weit außerhalb des
Streuungsbereiches liegen. Die Abweichungen bei den Elastizitatsmoduln betragen etwa
30 %. Da ein Verzerrungspfad mit 50 Lastschritten verwendet wurde, ist es leicht vorstellbar,
dass bei Versuchen mit bis zu 1000 Lastschritten die Abweichungen großer werden konnen.
Da bei manchen Einzelversuchen der linear elastische Bereich nicht beim Versuchsstart be-
ginnt, ist es gegebenenfalls erforderlich die Berechnung der elastischen Materialparameter
erst ab etwa 100 Lastschritten zu starten. Bei diesen Versuchen beseitigte die gewahlte
Vorspannung die aufgetretenen Fertigungstoleranzen zwischen Probekorper und Belastungs-
einrichtung nicht vollstandig.
Fur die weitere Untersuchung wurden effiziente Programmalgorithmen erstellt, die durch
Einsetzen der Versuchsnummer und der entsprechenden Rohdichte, eine breite Untersuchung
und qualitative Beurteilung der jeweiligen Berechnungsvariante ermoglichen.
Page 27
Elastischer Bereich 3.3: Varianten zur Berechnung der Materialparameter 22
3.3 Varianten zur Berechnung der Materialparameter
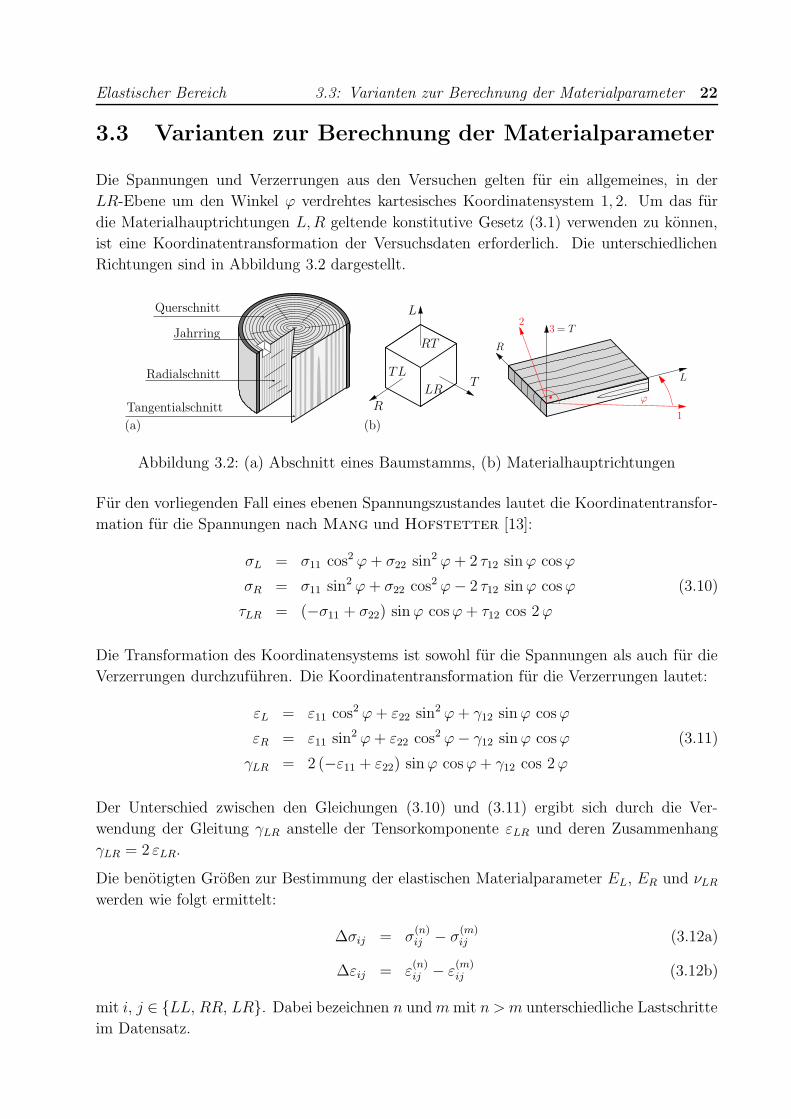
Die Spannungen und Verzerrungen aus den Versuchen gelten fur ein allgemeines, in der
LR-Ebene um den Winkel ϕ verdrehtes kartesisches Koordinatensystem 1, 2. Um das fur
die Materialhauptrichtungen L,R geltende konstitutive Gesetz (3.1) verwenden zu konnen,
ist eine Koordinatentransformation der Versuchsdaten erforderlich. Die unterschiedlichen
Richtungen sind in Abbildung 3.2 dargestellt.
L
R
1
2
ϕ
3 = T
R
L
TTL
LR
RT
Tangentialschnitt
Radialschnitt
Jahrring
Querschnitt
(a) (b)
Abbildung 3.2: (a) Abschnitt eines Baumstamms, (b) Materialhauptrichtungen
Fur den vorliegenden Fall eines ebenen Spannungszustandes lautet die Koordinatentransfor-
mation fur die Spannungen nach Mang und Hofstetter [13]:
σL = σ11 cos2 ϕ+ σ22 sin2 ϕ+ 2 τ12 sinϕ cosϕ
σR = σ11 sin2 ϕ+ σ22 cos2 ϕ− 2 τ12 sinϕ cosϕ (3.10)
τLR = (−σ11 + σ22) sinϕ cosϕ+ τ12 cos 2ϕ
Die Transformation des Koordinatensystems ist sowohl fur die Spannungen als auch fur die
Verzerrungen durchzufuhren. Die Koordinatentransformation fur die Verzerrungen lautet:
εL = ε11 cos2 ϕ+ ε22 sin2 ϕ+ γ12 sinϕ cosϕ
εR = ε11 sin2 ϕ+ ε22 cos2 ϕ− γ12 sinϕ cosϕ (3.11)
γLR = 2 (−ε11 + ε22) sinϕ cosϕ+ γ12 cos 2ϕ
Der Unterschied zwischen den Gleichungen (3.10) und (3.11) ergibt sich durch die Ver-
wendung der Gleitung γLR anstelle der Tensorkomponente εLR und deren Zusammenhang
γLR = 2 εLR.
Die benotigten Großen zur Bestimmung der elastischen Materialparameter EL, ER und νLR
werden wie folgt ermittelt:
∆σij = σ(n)ij − σ
(m)ij (3.12a)
∆εij = ε(n)ij − ε
(m)ij (3.12b)
mit i, j ∈ LL, RR, LR. Dabei bezeichnen n undmmit n > m unterschiedliche Lastschritte
im Datensatz.
Page 28
Elastischer Bereich 3.3: Varianten zur Berechnung der Materialparameter 23
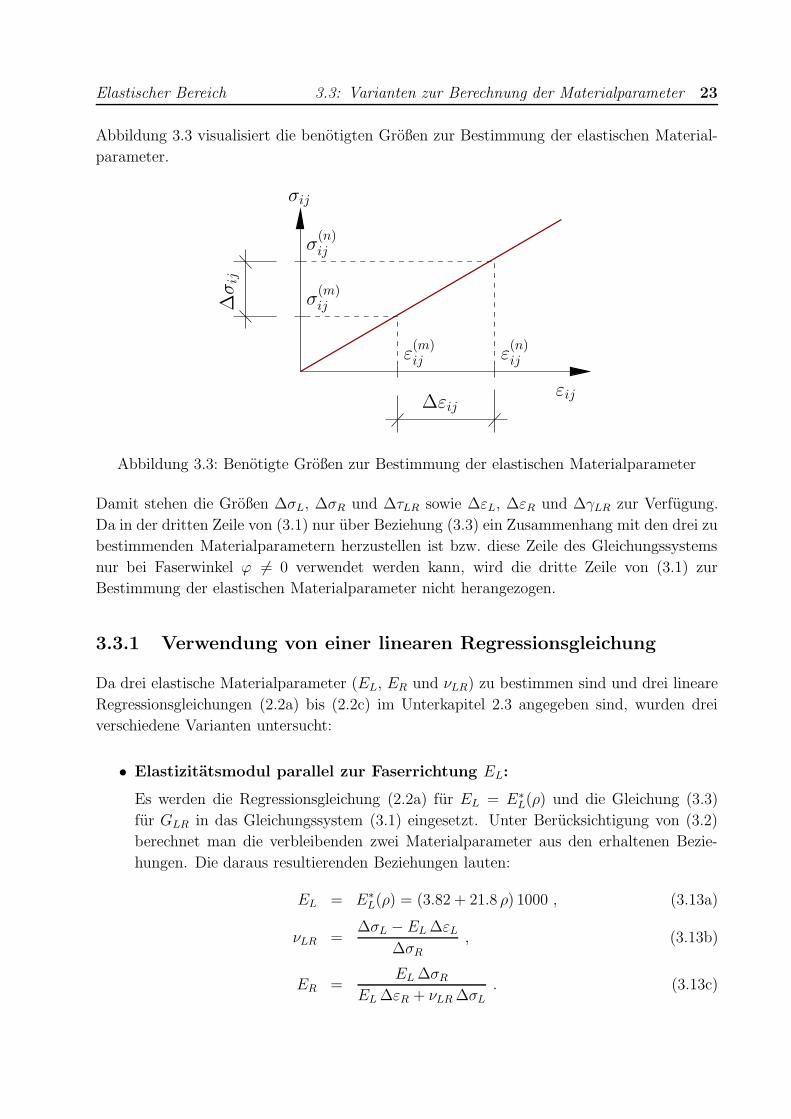
Abbildung 3.3 visualisiert die benotigten Großen zur Bestimmung der elastischen Material-
parameter.
∆εij
∆σ
ij
ε(n)ij
σ(m)ij
σ(n)ij
σij
εij
ε(m)ij
Abbildung 3.3: Benotigte Großen zur Bestimmung der elastischen Materialparameter
Damit stehen die Großen ∆σL, ∆σR und ∆τLR sowie ∆εL, ∆εR und ∆γLR zur Verfugung.
Da in der dritten Zeile von (3.1) nur uber Beziehung (3.3) ein Zusammenhang mit den drei zu
bestimmenden Materialparametern herzustellen ist bzw. diese Zeile des Gleichungssystems
nur bei Faserwinkel ϕ 6= 0 verwendet werden kann, wird die dritte Zeile von (3.1) zur
Bestimmung der elastischen Materialparameter nicht herangezogen.
3.3.1 Verwendung von einer linearen Regressionsgleichung
Da drei elastische Materialparameter (EL, ER und νLR) zu bestimmen sind und drei lineare
Regressionsgleichungen (2.2a) bis (2.2c) im Unterkapitel 2.3 angegeben sind, wurden drei
verschiedene Varianten untersucht:
• Elastizitatsmodul parallel zur Faserrichtung EL:
Es werden die Regressionsgleichung (2.2a) fur EL = E∗L(ρ) und die Gleichung (3.3)
fur GLR in das Gleichungssystem (3.1) eingesetzt. Unter Berucksichtigung von (3.2)
berechnet man die verbleibenden zwei Materialparameter aus den erhaltenen Bezie-
hungen. Die daraus resultierenden Beziehungen lauten:
EL = E∗L(ρ) = (3.82 + 21.8 ρ) 1000 , (3.13a)
νLR =∆σL − EL ∆εL
∆σR
, (3.13b)
ER =EL ∆σR
EL ∆εR + νLR ∆σL. (3.13c)
Page 29
Elastischer Bereich 3.3: Varianten zur Berechnung der Materialparameter 24
• Elastizitatsmodul normal zur Faserrichtung ER:
Es werden die Regressionsgleichung (2.2b) fur ER = E∗R(ρ) und die Gleichung (3.3)
fur GLR in das Gleichungssystem (3.1) eingesetzt. Unter Berucksichtigung von (3.2)
berechnet man die verbleibenden zwei Materialparameter aus den erhaltenen Bezie-
hungen. Die daraus resultierenden Beziehungen lauten:
ER = E∗R(ρ) = (−0.14 + 2.02 ρ) 1000 , (3.14a)
EL =ER ∆σ2
L
ER ∆εL ∆σL + (∆σR − ER ∆εR) ∆σR
, (3.14b)
νLR =EL (∆σR − ER ∆σR)
ER ∆σL. (3.14c)
• Querdehnungszahl νLR:
Es werden die Regressionsgleichung (2.2c) fur νLR = ν∗LR(ρ) und die Gleichung (3.3)
fur GLR in das Gleichungssystem (3.1) eingesetzt. Unter Berucksichtigung von (3.2)
berechnet man die verbleibenden zwei Materialparameter aus den erhaltenen Bezie-
hungen. Die daraus resultierenden Beziehungen lauten:
νLR = ν∗LR(ρ) = 0.45 + 0.112 ρ , (3.15a)
EL =∆σL − νLR σR
∆εL
, (3.15b)
ER =EL ∆σR
EL ∆εR + νLR ∆σL
. (3.15c)
Diese drei Varianten werden in der folgenden Abbildung 3.4 fur einen Versuch ausgewertet.
Der Versuch 098 aus [5] (ϕ = 0 und κ = −4:+5) zeigt die typischen Probleme und Merkmale
bei der Bestimmung der elastischen Materialparameter aus den Versuchsdaten auf. Die
benotigten Großen werden aus den Gleichungen (3.12a) und (3.12b) ermittelt, in dem man
n = m + 1 setzt.
Die Materialparameter aus den Regressionsformeln (2.2a) bis (2.2c) fur dieses Beispiel erhalt
man mit ρ = 0.437 g/cm3 zu:
EL = 13347 N/mm2 , ER = 743 N/mm2 und νLR = 0.50 . (3.16)
Abbildung 3.4 stellt fur veranderliches n die Auswertung folgender Formeln dar:
• Erste Zeile (a) – Gleichungen (3.13b) und (3.13c)
• Zweite Zeile (b) – Gleichungen (3.14b) und (3.14c)
• Dritte Zeile (c) – Gleichungen (3.15b) und (3.15c)
Als Vergleichswert sind die mittels den Regressionsformeln (2.2a) bis (2.2c) ermittelten Ma-
terialparameter strichliert in den Diagrammen eingetragen.
Page 30
Elastischer Bereich 3.3: Varianten zur Berechnung der Materialparameter 25
0 10 20 30 40 500
5000
10000
15000
Lastschritte
EL [N
/mm
2 ]
0 10 20 30 40 500
500
1000
1500
2000
Lastschritte
ER
[N/m
m2 ]
0 10 20 30 40 50
−1
0
1
2
3
Lastschritte
ν LR [
]
0 10 20 30 40 500
500
1000
1500
2000
Lastschritte
ER
[N/m
m2 ]
0 10 20 30 40 500
5000
10000
15000
Lastschritte
EL [N
/mm
2 ]
0 10 20 30 40 50
−1
0
1
2
3
Lastschritteν LR
[ ]
(c)
(b)
(a)
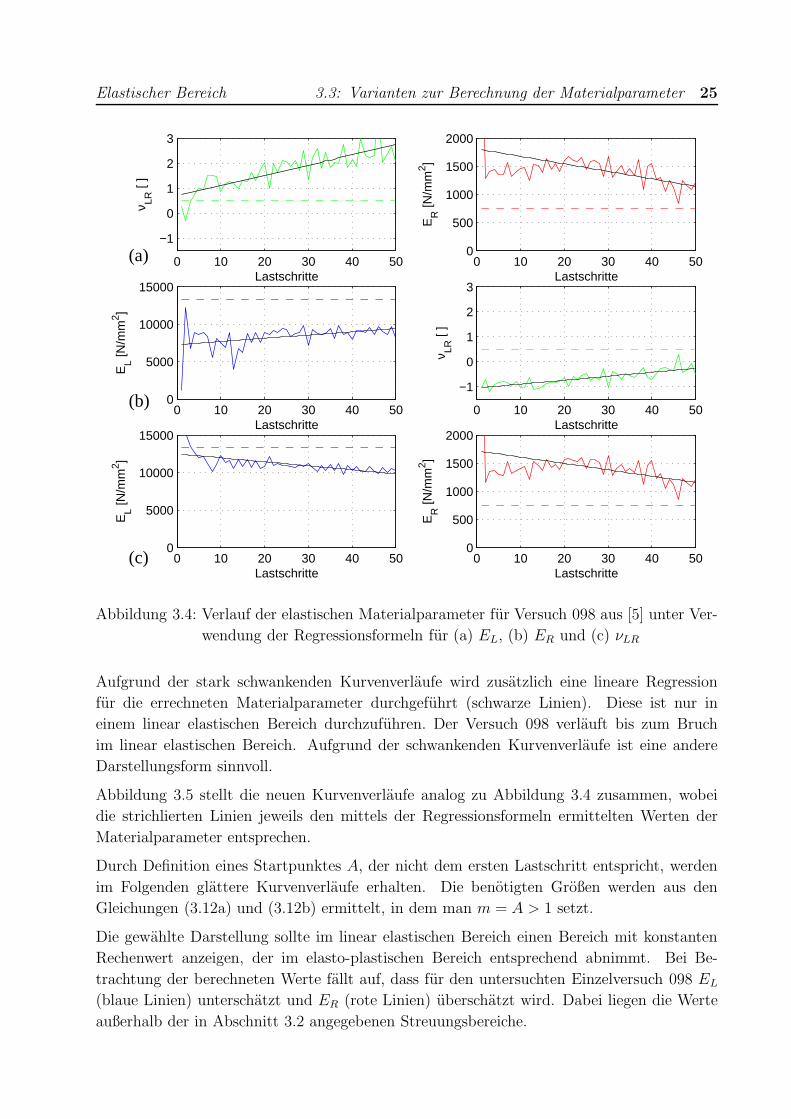
Abbildung 3.4: Verlauf der elastischen Materialparameter fur Versuch 098 aus [5] unter Ver-
wendung der Regressionsformeln fur (a) EL, (b) ER und (c) νLR
Aufgrund der stark schwankenden Kurvenverlaufe wird zusatzlich eine lineare Regression
fur die errechneten Materialparameter durchgefuhrt (schwarze Linien). Diese ist nur in
einem linear elastischen Bereich durchzufuhren. Der Versuch 098 verlauft bis zum Bruch
im linear elastischen Bereich. Aufgrund der schwankenden Kurvenverlaufe ist eine andere
Darstellungsform sinnvoll.
Abbildung 3.5 stellt die neuen Kurvenverlaufe analog zu Abbildung 3.4 zusammen, wobei
die strichlierten Linien jeweils den mittels der Regressionsformeln ermittelten Werten der
Materialparameter entsprechen.
Durch Definition eines Startpunktes A, der nicht dem ersten Lastschritt entspricht, werden
im Folgenden glattere Kurvenverlaufe erhalten. Die benotigten Großen werden aus den
Gleichungen (3.12a) und (3.12b) ermittelt, in dem man m = A > 1 setzt.
Die gewahlte Darstellung sollte im linear elastischen Bereich einen Bereich mit konstanten
Rechenwert anzeigen, der im elasto-plastischen Bereich entsprechend abnimmt. Bei Be-
trachtung der berechneten Werte fallt auf, dass fur den untersuchten Einzelversuch 098 EL
(blaue Linien) unterschatzt und ER (rote Linien) uberschatzt wird. Dabei liegen die Werte
außerhalb der in Abschnitt 3.2 angegebenen Streuungsbereiche.
Page 31
Elastischer Bereich 3.3: Varianten zur Berechnung der Materialparameter 26
10 20 30 40 500
5000
10000
15000
Lastschritte
EL [N
/mm
2 ]
10 20 30 40 500
500
1000
1500
2000
Lastschritte
ER
[N/m
m2 ]
10 20 30 40 50
−1
0
1
2
3
Lastschritte
ν LR [
]
10 20 30 40 500
500
1000
1500
2000
Lastschritte
ER
[N/m
m2 ]
10 20 30 40 500
5000
10000
15000
Lastschritte
EL [N
/mm
2 ]
10 20 30 40 50
−1
0
1
2
3
Lastschritteν LR
[ ]
(c)
(b)
(a)
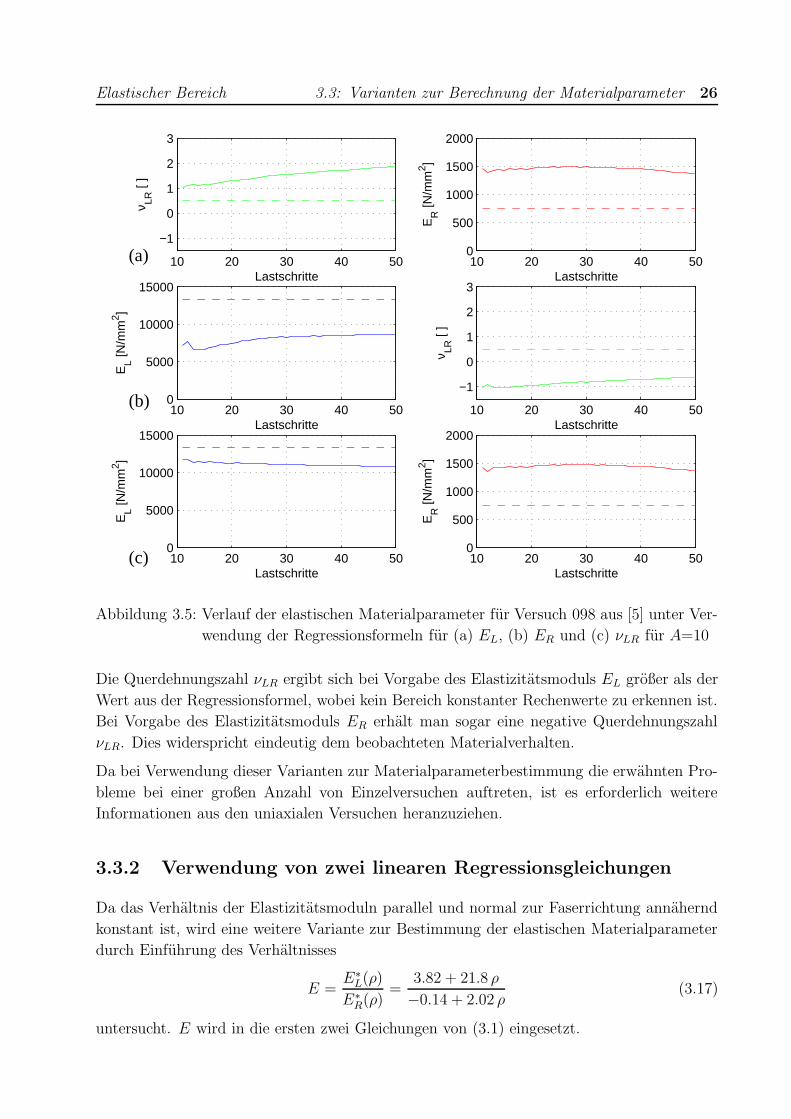
Abbildung 3.5: Verlauf der elastischen Materialparameter fur Versuch 098 aus [5] unter Ver-
wendung der Regressionsformeln fur (a) EL, (b) ER und (c) νLR fur A=10
Die Querdehnungszahl νLR ergibt sich bei Vorgabe des Elastizitatsmoduls EL großer als der
Wert aus der Regressionsformel, wobei kein Bereich konstanter Rechenwerte zu erkennen ist.
Bei Vorgabe des Elastizitatsmoduls ER erhalt man sogar eine negative Querdehnungszahl
νLR. Dies widerspricht eindeutig dem beobachteten Materialverhalten.
Da bei Verwendung dieser Varianten zur Materialparameterbestimmung die erwahnten Pro-
bleme bei einer großen Anzahl von Einzelversuchen auftreten, ist es erforderlich weitere
Informationen aus den uniaxialen Versuchen heranzuziehen.
3.3.2 Verwendung von zwei linearen Regressionsgleichungen
Da das Verhaltnis der Elastizitatsmoduln parallel und normal zur Faserrichtung annahernd
konstant ist, wird eine weitere Variante zur Bestimmung der elastischen Materialparameter
durch Einfuhrung des Verhaltnisses
E =E∗
L(ρ)
E∗R(ρ)
=3.82 + 21.8 ρ
−0.14 + 2.02 ρ(3.17)
untersucht. E wird in die ersten zwei Gleichungen von (3.1) eingesetzt.
Page 32
Elastischer Bereich 3.3: Varianten zur Berechnung der Materialparameter 27
Die daraus resultierenden Beziehungen lauten:
νLR =∆σL ∆εR − E∆σR ∆εL
∆σR ∆εR − ∆σL ∆εL, (3.18a)
EL =∆σL − νLR ∆σR
∆εL, (3.18b)
ER =EL
E. (3.18c)
Somit sind alle drei Materialparameter direkt mittels der Spannungs- und Verzerrungsdiffe-
renzen aus den Versuchsdaten berechenbar. Abbildung 3.6 stellt das Ergebnis dieser Variante
fur den Versuch 098 dar. Die benotigten Großen werden aus den Gleichungen (3.12a) und
(3.12b) ermittelt, in dem man n = B setzt.
−2 0 2 4
x 10−3
−20
−15
−10
−5
0
5σ − ε − Diagramm im 1−2−System
Versuch Nr.98
φ = 0 °
κ = −4:+5
−2 0 2 4
x 10−3
−20
−15
−10
−5
0
5σ − ε − Diagramm im L−R−System
σL / ε
Lσ
R / ε
RτLR
/ γLR
0 20 40 60−2.5
−2
−1.5
−1
−0.5
νLR
[ ]
0 20 40 605000
6000
7000
8000
9000
EL [N/mm2]
0 20 40 60250
300
350
400
450
500
ER
[N/mm2]
(a) (b)
(c)
Versuch 098
κ = −4 : +5
ϕ = 0
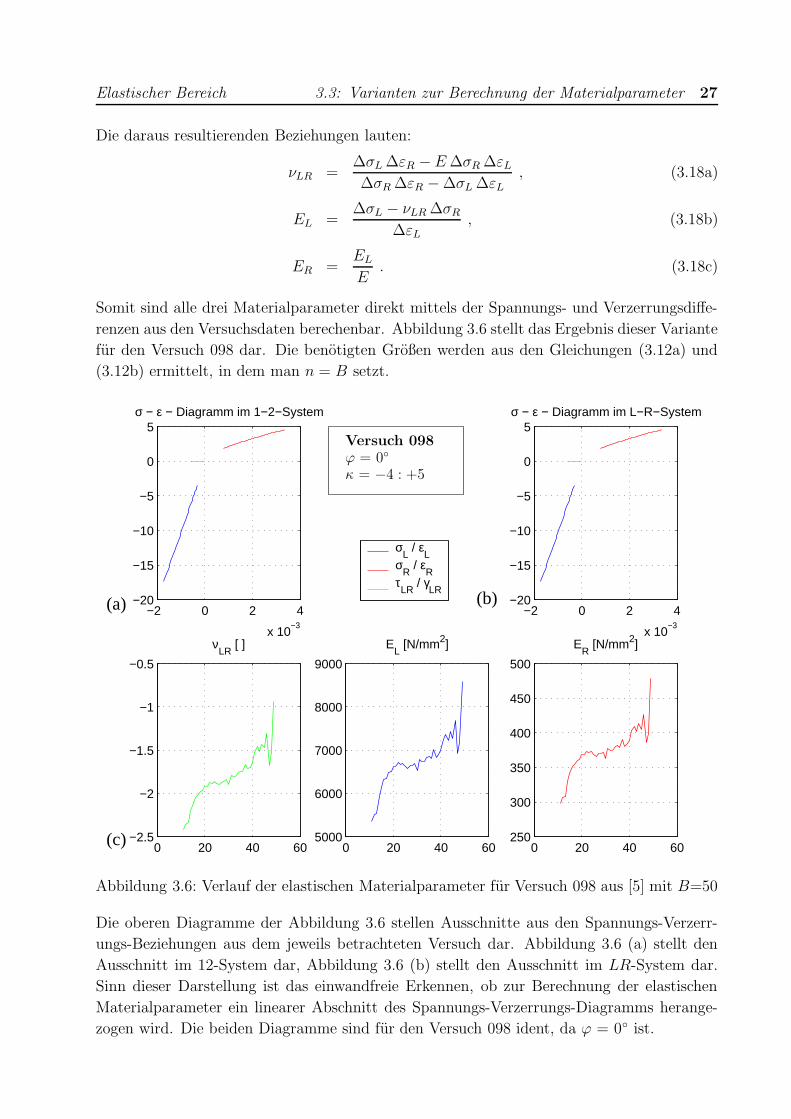
Abbildung 3.6: Verlauf der elastischen Materialparameter fur Versuch 098 aus [5] mit B=50
Die oberen Diagramme der Abbildung 3.6 stellen Ausschnitte aus den Spannungs-Verzerr-
ungs-Beziehungen aus dem jeweils betrachteten Versuch dar. Abbildung 3.6 (a) stellt den
Ausschnitt im 12-System dar, Abbildung 3.6 (b) stellt den Ausschnitt im LR-System dar.
Sinn dieser Darstellung ist das einwandfreie Erkennen, ob zur Berechnung der elastischen
Materialparameter ein linearer Abschnitt des Spannungs-Verzerrungs-Diagramms herange-
zogen wird. Die beiden Diagramme sind fur den Versuch 098 ident, da ϕ = 0 ist.
Page 33
Elastischer Bereich 3.4: Schlussfolgerungen 28
Abbildung 3.6 (c) stellt die Auswertungen der Gleichungen (3.18a) bis (3.18c), bei festgehal-
tenem Endpunkt B und beliebig wahlbarem Startpunkt m, dar.
Die Ergebnisse der Diagramme lassen sich wie folgt interpretieren. EL wird mit etwa
6800 N/mm2 deutlich unterschatzt, ER wird mit etwa 370 N/mm2 ebenfalls unterschatzt
(Werte bei m = 25). Man erhalt auch bei dieser Variante eine negative Querdehnzahl νLR.
Eine alternative Darstellung mit festgehaltenem Startpunkt m = A und variablem Endpunkt
n nach (3.12a) und (3.12b) liefert das selbe Resultat. Somit bleibt noch als letzte Variante alle
drei elastischen Materialparameter durch die Regressionen aus den uniaxialen Zugversuchen
vorzugeben.
3.3.3 Verwendung von allen linearen Regressionsgleichungen
Wie in [5] erwahnt und begrundet, und bereits in Unterkapitel 2.3 beschrieben, stellen die
uniaxialen Zugversuche parallel und normal zur Faserrichtung eine effiziente Moglichkeit zur
Erganzung der bei einem biaxialen Bruchversuch gewonnenen Messinformationen dar.
Fur die Versuchssimulationen werden die in Gleichung (3.6) dargestellten Annahmen fur die
elastischen Konstanten verwendet. Diese Annahmen ergeben sich aus den Streuungsberei-
chen, die in Unterkapitel 3.2 angegeben wurden und sich aus den Regressionsgleichungen
(2.2a) bis (2.2c) folgen.
3.4 Schlussfolgerungen
Das vorliegende Kapitel diente der Untersuchung der prinzipiellen Moglichkeit, die drei un-
abhangigen elastischen Materialparameter EL, ER und νLR, bei gegebenen Spannungs- und
Verzerrungsdifferenzen aus dem fur orthotropes Material gultigem elastischen Gesetz (3.1),
zu ermitteln.
Unabhangig von der Versuchskonfiguration (Druck- oder Zugversuch parallel oder normal zur
Faserrichtung) wurden mehrere Berechnungsvarianten untersucht, die sich durch unterschied-
liche Verwendung der aus den uniaxialen Zugversuchen ermittelten Regressionsgleichungen
unterscheiden.
Die Resultate der verschiedenen Varianten sind ahnlich. Unter Berucksichtigung der Streu-
ungsbereiche der zu bestimmenden Materialparameter, die sich zufolge variabler Rohdichte
aus den linearen Regressionsgleichungen (2.2a) bis (2.2c) ergeben, ist es nicht moglich,
diese, durch Vorgabe eines linear elastischen Auswertebereiches und der Rohdichte des je-
weiligen biaxialen Einzelversuches, zu berechnen.
Page 34
Elastischer Bereich 3.4: Schlussfolgerungen 29
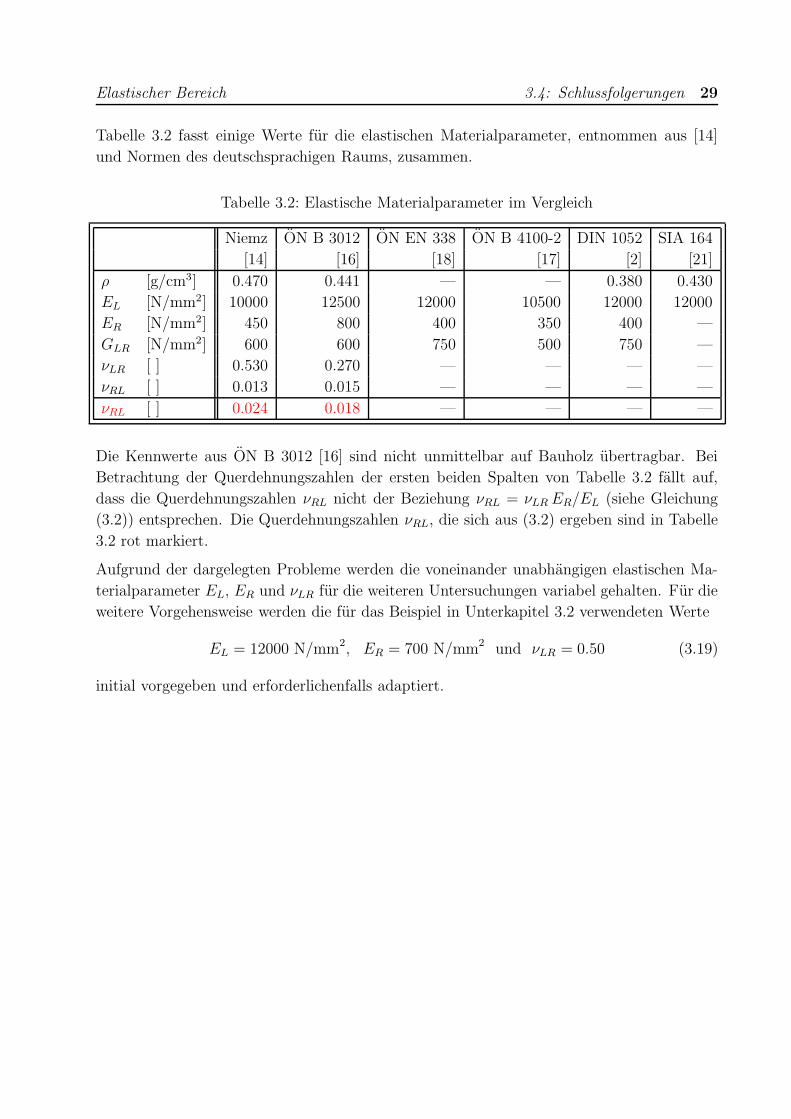
Tabelle 3.2 fasst einige Werte fur die elastischen Materialparameter, entnommen aus [14]
und Normen des deutschsprachigen Raums, zusammen.
Tabelle 3.2: Elastische Materialparameter im Vergleich
Niemz ON B 3012 ON EN 338 ON B 4100-2 DIN 1052 SIA 164
[14] [16] [18] [17] [2] [21]
ρ [g/cm3] 0.470 0.441 — — 0.380 0.430
EL [N/mm2] 10000 12500 12000 10500 12000 12000
ER [N/mm2] 450 800 400 350 400 —
GLR [N/mm2] 600 600 750 500 750 —
νLR [ ] 0.530 0.270 — — — —
νRL [ ] 0.013 0.015 — — — —
νRL [ ] 0.024 0.018 — — — —
Die Kennwerte aus ON B 3012 [16] sind nicht unmittelbar auf Bauholz ubertragbar. Bei
Betrachtung der Querdehnungszahlen der ersten beiden Spalten von Tabelle 3.2 fallt auf,
dass die Querdehnungszahlen νRL nicht der Beziehung νRL = νLR ER/EL (siehe Gleichung
(3.2)) entsprechen. Die Querdehnungszahlen νRL, die sich aus (3.2) ergeben sind in Tabelle
3.2 rot markiert.
Aufgrund der dargelegten Probleme werden die voneinander unabhangigen elastischen Ma-
terialparameter EL, ER und νLR fur die weiteren Untersuchungen variabel gehalten. Fur die
weitere Vorgehensweise werden die fur das Beispiel in Unterkapitel 3.2 verwendeten Werte
EL = 12000 N/mm2, ER = 700 N/mm2 und νLR = 0.50 (3.19)
initial vorgegeben und erforderlichenfalls adaptiert.
Page 35
Kapitel4Theoretische Grundlagen zur
Modellbildung
Die Beschreibung des mechanischen Verhaltens von Holz im Rahmen der Plastizitatstheo-
rie erfolgt mit Hilfe der im folgenden Unterkapitel zusammengefassten Beziehungen. Als
Fließflache fur das konstitutive Modellieren von Holz wird jenes Bruchkriterium herangezo-
gen, das in [5] vorgestellt wird. In Unterkapitel 4.2 wird eine ausfuhrliche mathematische
Diskussion dieser Flache durchgefuhrt.
4.1 Einaxiale Uberlegungen zur Beschreibung des plas-
tischen Verhaltens
Dieses Unterkapitel stellt die in Kapitel 5 verwendeten Grundgleichungen der Plastizitats-
theorie dar und erlautert die Vorgangsweise bei der Ermittlung der zusatzlichen Variablen,
die zur Beschreibung des plastischen Flusses erforderlich sind. Die Grundzuge des Pro-
jektionsverfahrens, welches zur Integration der plastischen Evolutionsgesetze dient, werden
erlautert. Anhand zweier eindimensionaler Beispiele fur Ver- bzw. Entfestigung werden die
Grundgleichungen der Plastizitatstheorie angewandt und diskutiert.
4.1.1 Grundgleichungen der Plastizitatstheorie
Die klassische Plastizitatstheorie wird durch einen Satz von Gleichungen beschrieben, die
das elastische Verhalten sowie die Evolution der inelastischen Verzerrungsgroßen bestimmen.
Im folgenden Abschnitt werden diese Grundgleichungen kurz zusammengefasst. Die Plasti-
zitatstheorie und die diskretisierte Form der Grundgleichungen sowie deren algorithmische
Behandlung werden ausfuhrlich in Simo und Hughes [23] beschrieben.
Page 36
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 31
Die Grundgleichungen werden in der folgenden Auflistung benannt und beschrieben:
• Primare Variablen:
Aus der Cauchy’schen Definition eines elastischen Korpers, gemaß der in einem elas-
tischen Korper die Verzerrungen ε = ε(σ, T ) allein durch die Spannungen σ und die
Temperatur T bestimmt sind, folgt die Definition eines inelastischen Korpers in der Art,
dass in diesem Fall die totalen Verzerrungen zusatzlich noch von anderen Einflussen
abhangen. Diese Einflusse konnen mathematisch durch zusatzliche Variablen beschrie-
ben werden. Deshalb werden folgende Großen als primare Variablen definiert:
ε, εp und α . (4.1)
Es sind dies, die in der Plastizitatstheorie als innere Variablen bezeichneten Großen εp
und α sowie die Gesamtverzerrung ε. εp ist der inelastische oder plastische Teil der
totalen Verzerrung ε. α steht fur eine oder mehrere verzerrungsahnliche Variablen zur
Beschreibung von Ver- und Entfestigung.
• Additive Zerlegung der totalen Verzerrungen:
Die Gesamtverzerrung ε wird additiv in einen elastischen (reversiblen) Anteil εe und
in einen plastischen (irreversiblen) Anteil εp zerlegt. Mathematisch ist dieser Zusam-
menhang zu
ε = εe + ε
p (4.2)
beschrieben.
• Hyperelastisches Materialgesetz:
Die Spannungs-Verzerrungs-Beziehung wird durch das folgende Gesetz beschrieben:
σ =∂ψ(ε, ε
p, α)
∂ε. (4.3)
Darin bezeichnet ψ die freie Helmholtz-Energie. Sie ist folgendermaßen definiert
[23]:
ψ(ε, εp, α) = W (ε − ε
p) + H(α) , (4.4)
wobei W die Verzerrungsenergiedichte und H ein Verfestigungspotential bezeichnen.
Durch die Beziehung (4.4) wird die freie Helmholtz-Energie in zwei additive Anteile
zerlegt. Schließlich benotigt man noch die Beziehung fur die Verzerrungsenergiedichte
W . Fur ein linear elastisches Material lautet sie
W (ε − εp) =
1
2(ε − ε
p) : C : (ε − εp) . (4.5)
Der Elastizitatstensor C ist in diesem Fall konstant. Durch Einsetzen des Ergebnisses
von (4.5) in (4.4) und anschließendem Einsetzen des Ergebnisses in (4.3) erhalt man
das verallgemeinerte Hooke’sche Gesetz zu:
σ = C : (ε − εp) = C : ε
e . (4.6)
Page 37
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 32
• Fließbedingung:
Die Fließbedingung begrenzt den Bereich rein elastischen Verhaltens im Spannungs-
raum. Alle zulassigen Spannungszustande mussen der Ungleichung
f(σ,q) ≤ 0 (4.7)
genugen. Das Gleichheitszeichen gilt ausschließlich im plastischen Bereich. Die ver-
anderliche spannungsahnliche Variable q bestimmt die aktuelle Ausdehnung der Fließ-
flache im Zuge eines Belastungsprozesses. Spannungszustande, die zu f > 0 fuhren,
sind in der Plastizitatstheorie nicht moglich.
• Verfestigungsgesetz:
Die in der Fließfunktion vorkommende innere Variable q(α) ist eine Funktion der
verzerrungsahnlichen Variablen α. Die entsprechende Definition ergibt sich aus der
Ableitung der Gleichung (4.4) nach α zu [23]:
q = −∂ψ(ε, εp, α)
∂α= −∂H(α)
∂α. (4.8)
• Assoziierte Fließregel – Evolutionsgleichung fur εp:
Bei Beschrankung auf die assoziierte Plastizitatstheorie wird die Evolution der plas-
tischen Verzerrungen εp durch den Spannungsgradienten der Fließflache und einem
Proportionalitatsfaktor, dem sogenannten Konsistenzparameter γ, wie folgt beschrie-
ben:
εp = γ
∂f
∂σ. (4.9)
∂f/∂σ gibt die Richtung, γ gibt die Große von εp an. Ver- bzw. Entfestigung wird mit
Hilfe der spannungsahnlichen inneren Variablen q, die von der verzerrungsahnlichen
inneren Variablen α abhangt, gesteuert (siehe Gleichung (4.8)).
• Assoziierte Verfestigungsregel – Evolutionsgleichung fur α:
Im Falle assoziierter Plastizitat wird die Evolution der internen plastischen Variablen
α durch den Gradienten der Fließflache bezuglich q und den skalaren Konsistenzpara-
meter γ mit
α = γ∂f
∂q(4.10)
festgelegt.
• Kriterien fur plastische Be- und Entlastung – Kuhn-Tucker-Bedingungen:
Die Kriterien fur plastische Be- und Entlastung lauten [10], [23]:
f(σ,q) ≤ 0 , (4.11a)
γ ≥ 0 , (4.11b)
γ f(σ,q) = 0 . (4.11c)
Page 38
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 33
Diese Bedingungen lassen zwei allgemeine Falle zu:
1. Fur f(σ,q) < 0 folgt aus (4.11c) γ = 0. Die Rate der plastischen Verzerrungen
verschwindet. Somit liegt ein rein elastischer Prozess vor.
2. Fur γ > 0 folgt aus (4.11c) die Forderung f = 0. Somit mussen Zustande, die zu
einer Veranderung der plastischen Variablen εp und α fuhren, auf der Fließflache
(f = 0) liegen.
• Konsistenzbedingung:
Zusatzlich zu den Kuhn-Tucker-Bedingungen muss die Konsistenzbedingung
γ f = 0 (4.12)
erfullt werden. Diese Bedingung lasst zwei allgemeine Falle zu:
1. Wenn sowohl f(σ,q) = 0 als auch f(σ,q) = 0 sind, dann entfernt sich ein auf der
Fließflache gelegener Spannungspunkt bei zusatzlicher Belastung nicht von dieser.
Es liegt plastische Belastung vor und es gilt γ ≥ 0. (Fur 2D- und 3D-Probleme
gibt es plastische Belastung fur die γ = 0 ist. Man spricht von neutraler Belastung
[10].) Die Konsistenzbedingung (4.12) dient der Ermittlung von γ.
2. Wenn jedoch f(σ, q) < 0 ist, dann muss γ = 0 gelten. Der Spannungspunkt
wandert in den elastischen Bereich. Man spricht in diesem Fall von Entlastung.
• Dissipation – Zweiter Hauptsatz der Warmelehre:
Zusatzlich zu den Grundgleichungen wird die Dissipationsungleichung angeschrieben.
Die Differenz zwischen der aufgewandten Leistung und der Rate der im Material ge-
speicherten freien Helmholtz-Energiedichte wird als Dissipation D bezeichnet. Unter
Berucksichtigung von (4.3), (4.4), (4.5) und (4.8) kann sie als
D = σ : ε − ψ = (σ − ∂ψ
∂ε) : ε − ∂ψ
∂εp: ε
p − ∂ψ
∂αα = σ : ε
p + q α ≥ 0 (4.13)
angeschrieben werden. Die Dissipation ist fur rein elastische Prozesse zu D = 0 defi-
niert. Aus [23] entnimmt man, dass die assoziierten Gesetze das sogenannte Prinzip
der maximalen plastischen Dissipation erfullen. Dieses Prinzip besagt, dass die Dis-
sipation D durch Einsetzen der Fließregel (4.9) und der Verfestigungsregel (4.10) in
Gleichung (4.13) maximal wird.
4.1.2 Ermittlung des Konsistenzparameters
In diesem Abschnitt wird die Ermittlung des Konsistenzparameters γ aus den im Ab-
schnitt 4.1.1 dargestellten Differentialgleichungssystem beschrieben. Dabei werden die zwei
Falle Verfestigung und Entfestigung unterschieden.
Page 39
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 34
4.1.2.1 Verfestigung
Fur plastische Belastung (γ > 0) folgt aus der Konsistenzbedingung (4.12) die Bedingung
f =∂f
∂σ: σ +
∂f
∂q· q = 0 . (4.14)
In Gleichung (4.14) wird die Ratenform des verallgemeinerten Hooke’schen Gesetzes (4.3)
unter Berucksichtigung von (4.2) sowie die Ratenform des Verfestigungsgesetzes (4.8) einge-
setzt. Man erhalt dadurch
f =∂f
∂σ: C : ε − ∂f
∂σ: C : ε
p − ∂f
∂q· K · α = 0 , (4.15)
wobei K = −∂q/∂α den Verfestigungsmodul bezeichnet. Durch Einsetzen der Fließregel
(4.9) und der Verfestigungsregel (4.10) in Gleichung (4.15) erhalt man
f =∂f
∂σ: C : ε − ∂f
∂σ: C :
∂f
∂σγ − ∂f
∂q· K · ∂f
∂qγ = 0 . (4.16)
Gleichung (4.16) stellt eine skalare Gleichung zur Bestimmung von γ dar. Die gesuchte
Beziehung fur den Konsistenzparameter erhalt man durch Umformen der Gleichung (4.16)
zu
γ =
∂f∂σ
: C : ε
∂f∂σ
: C :∂f∂σ
+∂f∂q
· K · ∂f∂q
. (4.17)
Uber die Gleichungen (4.9), (4.10) und (4.17) sind somit die Raten εp und α bestimmt.
4.1.2.2 Entfestigung
Die Einfuhrung der inneren Variable q = q(α) ist nur sinnvoll bei Betrachtung von Ver-
festigung. Die Spannungsgroße q(α) reprasentiert innere Spannungen und fuhrt zu einem
Anteil H(α) > 0 an der freien Helmholtz-Energie (siehe Gleichung (4.4)). Bei Betrach-
tung von Entfestigung wird dagegen keine Energie gespeichert (H(α) = 0). Dadurch wird
laut Gleichung (4.8) q = 0.
Die Beziehung fur die Entfestigungsregel wird zufolge q = 0 folgendermaßen definiert:
α = sγ , (4.18)
wobei s ein vom aktuellen Spannungszustand abhangiger Vektor ist. Der Unterschied zur
Verfestigung liegt bei der Lokalisierung der Entfestigungszone zu einem diskreten Riss und
der Energiedissipation entlang der Rissflache.
Die Plastizitatstheorie arbeitet mit volumsspezifischen Großen. Bei der Beschreibung loka-
lisierter Phanomene wurde dies zu einer Abhangigkeit von der Große des Referenzvolumens
fuhren.
Page 40
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 35
Um dieses Problem zu beheben, muss die Energiebilanz im Zuge einer Rissbildung betrach-
tet werden. Dazu setzt man die dissipierte Energie nach Plastizitatstheorie innerhalb dieses
Referenzvolumens (z.B. ein finites Element) gleich der dissipierten Energie gemaß Bruchme-
chanik in der Rissflache.
Die kontinuumsmechanische Dissipation D gemaß (4.13) ist eine volumsspezifische Große.
Die bruchmechanische Energiefreisetzungsrate Gf dagegen ist eine flachenspezifische Große,
die bei vollstandiger Ausbildung des Risses freigesetzt wird. Um die Großen vergleichen zu
konnen, muss man die Gesamtenergie bei vollstandiger Ausbildung eines Risses innerhalb
eines vorgegebenen Kontrollvolumens V betrachten. Die Rissflache innerhalb des Kontrollvo-
lumens wird mit A bezeichnet. Da ab der vollstandigen Ausbildung des Risses die Dissipation
D zu null wird, kann die dissipierte Gesamtenergie E als
E =
∫
V
(∫ ∞
0
D dt
)
dV =
∫
A
Gf dA (4.19)
dargestellt werden. Das fuhrt schließlich zur Identifikation einer charakteristischen Lange
`c = V/A. Auf ihren Einfluss wird im Unterabschnitt 4.1.5.2, im Abschnitt 4.2.5 und im
Kapitel 6 eingegangen. In Oliver [15] findet man Details bezuglich der Ermittlung der
charakteristischen Lange `c fur isoparametrische finite Elemente.
Mit diesen Aussagen, die Entfestigung betreffend, wird nun die Konsistenzbedingung fur
Entfestigung formuliert. Im Gegensatz zum Fall Verfestigung wird die Festigkeit Y (α) als
eine Spannungsgroße in der Fließbedingung f(σ, Y ) eingefuhrt. Fur plastische Belastung
(γ > 0) folgt damit aus der Konsistenzbedingung (4.12)
f =∂f
∂σ: σ +
∂f
∂Y
∂Y
∂α· α = 0 . (4.20)
In Gleichung (4.20) wird die Ratenform des verallgemeinerten Hooke’schen Gesetzes (4.6)
unter Berucksichtigung von (4.2) eingesetzt. Zusatzlich wird der Entfestigungsmodul K =
∂Y (α)/∂α als Funktion von α eingefuhrt. Dies fuhrt auf
f =∂f
∂σ: C : ε − ∂f
∂σ: C : ε
p +∂f
∂YK(α) · s γ = 0 . (4.21)
Durch Einsetzen der Fließregel (4.9) in Gleichung (4.21) erhalt man
f =∂f
∂σ: C : ε − ∂f
∂σ: C :
∂f
∂σγ +
∂f
∂YK(α) · s γ = 0 . (4.22)
Daraus erhalt man die gesuchte Beziehung fur den Konsistenzparameter zu:
γ =
∂f∂σ
: C : ε
∂f∂σ
: C :∂f∂σ
− ∂f∂Y
K(α) · s. (4.23)
Wenn ein Zustand (ε, εp, α) bekannt ist, konnen die Spannungen σ und die Festigkeit Y
sowie der Entfestigungsmodul K berechnet werden. Somit sind mittels (4.9), (4.18) und
(4.23) auch die Raten εp und α bestimmt.
Page 41
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 36
4.1.3 Diskretisierte Form der Grundgleichungen
Es wird eine geometrisch lineare und physikalisch nichtlineare Theorie betrieben. Geome-
trisch linear steht fur die Beschrankung auf kleine Verschiebungen und die damit verbun-
dene Linearisierung der kinematischen Beziehungen. Physikalisch nichtlinear bedeutet, dass
ein nichtlinearer Zusammenhang zwischen Spannungen und Verzerrungen besteht. Zur Be-
rechnung physikalisch nichtlinearer Probleme werden die Lasten in einzelnen Lastschritten
aufgebracht.
Es wird nun ein Lastinkrement betrachtet, das sich uber das Zeitintervall [tn, tn+1] erstreckt.
Am Beginn des Intervalls werden die plastischen Verzerrungen εpn und die inneren Variablen
αn als bekannt angenommen. Die Indizes n und n+ 1 bezeichnen Großen zum Zeitpunkt tnbzw. tn+1.
Ziel ist es, wahrend des Intervalls [tn, tn+1] die Zustande εpn+1 und αn+1 zu ermitteln. Dazu
sind die Evolutionsgesetze im Zeitschritt [tn, tn+1] zu integrieren. Zur numerischen Integra-
tion wird das Euler-Ruckwarts-Verfahren verwendet. Dieses Integrationsverfahren wird im
folgenden anhand der Integration von (4.9) beschrieben. Das Integral von (4.9) uber den
betrachteten Zeitintervall lautet:∫ tn+1
tn
εp dt =
∫ tn+1
tn
γ∂f(σ, q)
∂σdt . (4.24)
Fur die linke Seite von (4.24) gilt
∫ tn+1
tn
εp dt =
∫ tn+1
tn
dεp
dtdt =
∫ tn+1
tn
dεp = εpn+1 − ε
pn . (4.25)
Die rechte Seite von (4.24) ist im allgemeinen nur numerisch zu losen. Diese numerische
Integration soll mittels des impliziten Euler-Ruckwarts-Verfahrens erfolgen. Das Charak-
teristikum dieses Verfahrens ist die Annahme, dass der Term ∂f/∂σ in Gleichung (4.24) fur
den Lastschritt n + 1 ausgewertet wird und damit aus dem Integral herausgehoben werden
kann. Fur das ubriggebliebene Integral auf der rechten Seite von (4.24) gilt somit
∫ tn+1
tn
γdt =
∫ tn+1
tn
dγ
dtdt =
∫ tn+1
tn
dγ = γn+1 . (4.26)
Bei γn+1 handelt es sich um eine inkrementelle Große uber das Zeitintervall [tn, tn+1]. Das
Einsetzen von (4.25) und (4.26) in (4.24) liefert
εpn+1 = ε
pn + γn+1
∂f
∂σ
∣∣∣∣n+1
. (4.27)
Eine analoge Beziehung erhalt man aus (4.10) zu
αn+1 = αn + γn+1∂f
∂q
∣∣∣∣n+1
. (4.28)
Page 42
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 37
Die zugehorigen Spannungsgroßen am Ende des Zeitintervalls folgen aus (4.3) und (4.8) zu
σn+1 = C : (εn+1 − εpn+1) und (4.29)
qn+1 = q(αn+1) . (4.30)
Die totale Verzerrung εn+1 wird als bekannt vorausgesetzt. Die inkrementelle Form der
Kuhn-Tucker-Bedingungen (4.11a) bis (4.11c) lautet
γn+1 ≥ 0 , (4.31a)
fn+1 = f(σn+1,qn+1) ≤ 0 und (4.31b)
γn+1 fn+1 = 0 . (4.31c)
Die Gleichungen (4.27) bis (4.30) bilden mit den Kuhn-Tucker-Bedingungen (4.31a) bis
(4.31c) als Zwangsbedingungen ein Gleichungssystem fur εpn+1, αn+1, σn+1, qn+1 und γn+1.
Die diskrete Form der Konsistenzbedingung (4.12) wird durch die Bedingung (4.31c) ersetzt.
Dieses vorgestellte Verfahren wird als Projektionsverfahren oder Return Map Algorithmus
bezeichnet.
4.1.4 Losungsalgorithmus fur das Projektionsverfahren
Das Projektionsverfahren nach Abschnitt 4.1.3 enthalt Ungleichungen in Form der Kuhn-
Tucker-Bedingungen. Diese erfordern einen zweistufigen Losungsalgorithmus, der auf
Simo und Taylor [22] zuruckgeht. Die folgende Darstellung beruht auf dem Buch von
Simo und Hughes [23].
Die im Zuge des folgenden Algorithmus zu losenden Gleichungen sind haufig nichtlinear und
erfordern eine iterative Losungsstrategie. Nichtsdestotrotz ermoglichen sie eine geschlos-
sene Darstellung des Tangentenoperators des Projektionsverfahrens. Dieser wird haufig als
konsistente Tangente bezeichnet.
Das Projektionsverfahren besteht im wesentlichen aus drei Teilschritten:
1. Formulierung einer elastischen Pradiktorspannung
2. Uberprufung, ob die elastische Pradiktorspannung die Fließbedingung fn+1 < 0 verletzt
3. Projektion der Pradiktorspannung auf die Fließflache, wenn die Pradiktorspannung die
Fließbedingung verletzt
Zuerst fuhrt man den sogenannten elastischen Pradiktor-Zustand (Trial-Zustand) ein. Er
zeichnet sich durch das Einfrieren der plastischen Verzerrungen aus. Man erhalt den Pradik-
tor-Zustand zu
εp trialn+1 = ε
pn und (4.32)
αtrialn+1 = αn . (4.33)
Page 43
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 38
Den Pradiktor-Zustand des Spannungstensors erhalt man damit zu
σtrialn+1 = C : (εn+1 − ε
p trialn+1 ) = C : (εn+1 − ε
pn) . (4.34)
Den Pradiktor-Zustand der Verfestigungsspannung erhalt man mittels (4.33) aus (4.8) zu
qtrialn+1 = q(αtrial
n+1 ) = q(αn) = qn . (4.35)
Schließlich setzt man Gleichungen (4.34) und (4.35) in die Fließbedingung (4.7) ein und
erhalt
f trialn+1 = f(σtrial
n+1 ,qtrialn+1 ) . (4.36)
Fur den Fall, dass f trialn+1 < 0 ist, erhalt man aus (4.31c) γn+1 = 0 und die Annahme eines
elastischen Lastschrittes war richtig. Wenn aber f trialn+1 ≥ 0 gilt, dann liegt im betrachteten
Lastschritt plastisches Werkstoffverhalten vor und es gilt γn+1 ≥ 0. Um γn+1 zu berechnen,
definiert man die Residuen der Gleichungen (4.27) und (4.28) zu
Rεn+1 = −ε
pn+1 + ε
pn + γn+1
∂f
∂σ
∣∣∣∣n+1
= 0 und (4.37)
Rαn+1 = −αn+1 + αn + γn+1
∂f
∂q
∣∣∣∣n+1
= 0 . (4.38)
Gemeinsam mit den Beziehungen (4.29), (4.30) und der Konsistenzbedingung fn+1 = 0
erhalt man ein nichtlineares Gleichungssystem in den Unbekannten σn+1, qn+1, εpn+1, αn+1
und γn+1, das mit Hilfe des Newton-Raphson-Verfahrens iterativ gelost wird. Wahrend
der Projektion bleiben die Gesamtverzerrungen εn+1 konstant.
Die genaue Vorgangsweise zur Ermittlung des Konsistenzparameters mit dem Iterationsver-
fahren wird anhand eines Beispiels in Unterabschnitt 4.1.5.2 erlautert.
Die geometrische Interpretation der grundsatzlichen Vorgangsweise im Rahmen des Projek-
tionsverfahren ist fur den Spezialfall idealer Plastizitat in Abbildung 4.1 dargestellt.
BereichElastischer
Return Map
σn+1
fn+1 = 0σn
σtrial
n+1 ⇒ f trial
n+1 > 0
C :∂fn+1
∂σn+1
Abbildung 4.1: Geometrische Interpretation des Projektionsverfahrens
Page 44
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 39
4.1.5 Einfache Beispiele zur Illustration der Vorgangsweise
4.1.5.1 Eindimensionales Beispiel fur Verfestigung
Anhand der Fließbedingung
f = |σ| + q − Y ≤ 0 (4.39)
sollen prinzipielle Zusammenhange zwischen Spannungen, Verzerrungen und den inneren
Variablen dargestellt werden. Die Verfestigung wird durch das lineare Gesetz
q = −K α (4.40)
beschrieben. Die Festigkeit wird Y = σc,0 = konst. gesetzt. Ausgangssituation ist eine
Belastungsgeschichte in Form eines einaxialen Spannungszustandes.
Als ersten Schritt werden die Grundgleichungen aus Abschnitt 4.1.1 auf die angegebene
Fließbedingung (4.39) angewandt. Die Fließregel (4.9) lautet somit
εp = γ∂f
∂σ= γ sign σ . (4.41)
Die Verfestigungsregel (4.10) liefert
α = γ∂f
∂q= γ 1 = γ . (4.42)
Die eindimensionale Fassung des elastischen Gesetzes folgt aus (4.6), indem man C durch E
und εe durch die Differenz (ε− εp) ersetzt. Die Ratenform folgt durch dessen Zeitableitung
und unter Berucksichtigung von (4.41) zu
σ = E (ε− εp) = E (ε− γ sign σ) . (4.43)
Die Ratenform des Verfestigungsgesetz erhalt man durch Einsetzen von Gleichung (4.42) in
die Ratenform von (4.40) zu
q = −K α = −K γ . (4.44)
Um eine Beziehung fur die plastische Dissipation zu erhalten, ist es erforderlich, die Fließ-
bedingung (4.39) gleich null zu setzen und nach σ aufzulosen. Mittels der Zusammenhange
|σ| = σ sign σ und sign σ = 1/sign σ erhalt man
σ = (σc,0 − q) signσ . (4.45)
Durch Einsetzen der Beziehungen (4.45) fur σ, (4.41) fur εp, (4.40) fur q und (4.42) fur α in
(4.13) erhalt man die plastische Dissipation zu
D = σ εp + q α = [(σc,0 − q) sign σ] [sign σ γ] + q γ = σc,0 γ . (4.46)
Page 45
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 40
Wegen σc,0 = konst. > 0 und (4.11b) ist D ≥ 0 sichergestellt. Durch Einsetzen von (4.43)
und (4.44) in (4.14) erhalt man unter Beachtung von (4.41) und (4.42) eine skalare Gleichung
zur Bestimmung von γ zu
f =∂f
∂σσ +
∂f
∂qq = sign σ E (ε− γ sign σ) + 1 (−K γ) = 0 (4.47)
Daraus ermittelt man die gesuchte Beziehung fur den Konsistenzparameter zu
γ =E ε
E +Ksign σ ≥ 0 . (4.48)
Die Anwendung des Projektionsverfahrens erfolgt gemaß Abschnitt 4.1.3. Dazu werden die
plastischen Zustandsvariablen εp und α unter Beachtung von (4.41) gemaß (4.27) zu
εpn+1 = εp
n + γn+1 sign σn+1 (4.49)
und unter Beachtung von (4.42) gemaß (4.28) zu
αn+1 = αn + γn+1 (4.50)
aktualisiert. Einsetzen von (4.49) in (4.43) liefert
σn+1 = E (εn+1 − εpn+1) = E (εn+1 − εp
n)︸ ︷︷ ︸
=: σtrialn+1
−γn+1E sign σn+1 . (4.51)
Einsetzen von (4.49) in (4.40) liefert
qn+1 = −K αn+1 = −K αn︸ ︷︷ ︸
=: qtrialn+1
−K γn+1 . (4.52)
Um die Fließbedingung zum Zeitpunkt tn+1 auswerten zu konnen, benotigt man |σn+1|. Dazu
schreibt man (4.51) als
sign σn+1 |σn+1| = sign σtrialn+1 |σtrial
n+1 | − γn+1E sign σn+1 (4.53)
und weiters als
sign σn+1 (|σn+1| + γn+1E) = sign σtrialn+1 |σtrial
n+1 | . (4.54)
Da sowohl (|σn+1| + γn+1E) > 0, als auch |σtrialn+1 | > 0 sein muss, folgt aus (4.54)
sign σn+1 = sign σtrialn+1 (4.55)
und weiters
|σn+1| = |σtrialn+1 | − γn+1E . (4.56)
Page 46
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 41
Durch Einsetzen der Ausdrucke (4.56) und (4.52) in die Fließbedingung (4.39) erhalt man
fn+1 = f(σn+1, qn+1) = |σn+1| + qn+1 − σc,0 = f trialn+1 − γn+1 (E +K) = 0, (4.57)
wobei
f trialn+1 = f(σtrial
n+1 , qtrialn+1 ) = |σtrial
n+1 | + qtrialn+1 − σc,0 (4.58)
den Wert der Fließfunktion fur den Pradiktor-Zustand bezeichnet. Aus der Bedingung (4.57)
erhalt man letztendlich
γn+1 =f trial
n+1
E +K≥ 0 . (4.59)
Das Einsetzen von (4.59) in die Beziehungen (4.49) bis (4.52) liefert die aktualisierten Zu-
standsgroßen σn+1, qn+1, εpn+1 und αn+1.
Durch die Existenz einer linearen Gleichung (4.59) in einer Unbekannten γn+1 kann der
Gleichungssatz des Projektionsverfahrens direkt gelost werden. Dies ist fur allgemeinere
Fließbedingungen oder Verfestigungsgesetze nicht mehr moglich.
Abbildung 4.2 zeigt das Ergebnis des eindimensionalen Beispiels fur isotrope Verfestigung
mit den Materialparametern E = 10.0 N/mm2, K = 2.0 N/mm2 und σc,0 = 1.2 N/mm2.
Die hervorgehobene blaue Linie in Abbildung 4.2 (c) entspricht der vorgegebenen Belas-
tungsgeschichte.
In Abbildung 4.2 (e) wird anstatt der Dissipation D aus (4.46) die dissipierte spezifische
Energie oder akkumulierte Dissipation∫D dt aufgetragen.
Folgende Großen sind in Form von Diagrammen aufgetragen:
• Graphen von (a): σ, (c): ε, εp, α und (e):∫D dt uber der Zeit
• (b): Spannungs-Verzerrungs-Beziehung
• (d): Graphen von εp und α uber der totalen Verzerrung ε
• (f): Graph von q uber der totalen Verzerrung ε bzw. der plastischen Verzerrung εp
Page 47
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 42
0 100 200 300 400−2
−1
0
1
2
3
Zeit [s]
Spa
nnun
g [N
/mm
2 ]
−0.5 0 0.5−2
−1
0
1
2
3
Verzerrung ε [ ]
Spa
nnun
g [N
/mm
2 ]
0 100 200 300 400−0.5
0
0.5
1
Zeit [s]
ε , ε
p , α
[ ]
εεp
α
−0.5 0 0.5−0.5
0
0.5
1
Verzerrung ε [ ]εp ,
α [ ]
εp
α
0 100 200 300 4000
0.5
1
Zeit [s]−0.5 0 0.5
−1.5
−1
−0.5
0
ε , εP [ ]
q [N
/mm
2 ]
εεP
(b)
(d)
(f)
(a)
(c)
(e)
akkum
ulier
teD
issipat
ion
[N/m
m2]
Abbildung 4.2: Ergebnisse des eindimensionalen Beispiels fur Verfestigung
Aus den Diagrammen von Abbildung 4.2 lassen sich folgende Eigenschaften ablesen:
• Die Spannung σ steigt zufolge K > 0 auch im plastischen Bereich an.
• Die plastische Verzerrung εp bleibt im elastischen Bereich konstant.
• Die Raten von ε und εp besitzen im plastischen Bereich gleiche Vorzeichen.
• Die innere Variable α ist im Gegensatz zu εp positiv definit.
• Die akkumulierte Dissipation∫D dt steigt nur im plastischen Bereich an.
• Die innere Variable q nimmt nur negative Werte an.
Page 48
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 43
4.1.5.2 Eindimensionales Beispiel fur Entfestigung
Anhand der Fließbedingung
f = σ − Y (α) ≤ 0 (4.60)
sollen prinzipielle Zusammenhange zwischen Spannungen, Verzerrungen und den inneren
Variablen dargestellt werden. Die Festigkeit wird durch das exponentielle Gesetz
Y (α) = σc(α) = σc,0 e−ks α (4.61)
beschrieben. Ausgangssituation ist eine Belastungsgeschichte in Form eines einaxialen Span-
nungszustandes.
Als ersten Schritt werden, analog zum Unterabschnitt 4.1.5.1, die Grundgleichungen aus
Abschnitt 4.1.1 auf die angegebene Fließbedingung (4.60) angewandt. Die Fließregel (4.9)
lautet somit
εp = γ∂f
∂σ= γ 1 = γ . (4.62)
Die Beziehung fur die Verfestigungsregel ergibt sich zufolge q = 0 aus (4.18) zu
α = s γ = 1 γ = γ , (4.63)
wobei
s = − ∂f
∂Y= 1 . (4.64)
gilt. Aus (4.61) ergibt sich eine Beziehung fur den Entfestigungsmodul K, der definitions-
gemaß negativ sein muss. Die Rate von Y erhalt man mittels der Ableitung von Y nach α
zu
Y =dY
dαα = −σc,0 e
−ks α ks︸ ︷︷ ︸
=: K(α)
α . (4.65)
Aus (4.65) erhalt man unter Berucksichtigung von (4.61) eine Beziehung fur den Entfesti-
gungsmodul K zu
K(α) = −ks σc,0 e−ks α = −ks Y (α) . (4.66)
Die eindimensionale Fassung des elastischen Gesetzes folgt aus (4.6), indem man C durch E
und εe durch die Differenz (ε− εp) ersetzt. Die Ratenform folgt durch dessen Zeitableitung
und unter Berucksichtigung von (4.62) zu
σ = E (ε− εp) = E (ε− γ) . (4.67)
Um eine Beziehung fur die plastische Dissipation zu erhalten, ist es erforderlich, die Fließ-
bedingung (4.60) gleich null zu setzen und nach σ aufzulosen. Man erhalt
σ = σc(α) = σc,0 e−ks α . (4.68)
Page 49
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 44
Durch Einsetzen der Beziehungen (4.68) fur σ, (4.62) fur εp und q = 0 in (4.13) erhalt man
die plastische Dissipation zu
D = σ εp + q α = σ εp = σc(α) γ . (4.69)
Wegen σc,0 = konst. > 0 und (4.61) sowie (4.11b) ist D ≥ 0 sichergestellt. Der in der Glei-
chung (4.61) vorkommende Materialparameter ks wird durch Formulierung der Beziehung
fur die dissipierte Gesamtenergie E bei Rissbildung gemaß (4.19) ermittelt.
Unter Berucksichtigung von (4.69) ergibt sich fur einen homogenen Zustand innerhalb eines
Kontrollvolumens V
E =
∫
V
(∫ ∞
0
D dt
)
dV = V
∫ ∞
0
σc(α(t)) γ dt . (4.70)
Durch Substitution der Integrationsvariablen dt durch dα = α dt und Berucksichtigung der
Verfestigungsregel (4.63) erhalt man
E = V
∫ ∞
0
σc(α) dα . (4.71)
Einsetzen von (4.68) in (4.71) und Herausheben der Konstanten 1/ks aus dem Integral liefert
E = − 1
ksV σc,0
∫ ∞
0
−kse−ks α dα . (4.72)
Nach Losung des bestimmten Integrals erhalt man
E = − 1
ks
V σc,0e−ksα
∣∣∣∣
∞
0
=1
ks
V σc,0 . (4.73)
Gleichsetzen von (4.73) mit (4.19) liefert eine Beziehung fur den Materialparameter ks zu
ks =`c σc,0
Gf
mit `c =V
A, (4.74)
wobei `c als charakteristische Lange bezeichnet wird (siehe Unterabschnitt 4.1.2.2).
Zuletzt wird die Bestimmungsgleichung fur den Konsistenzparameter fur den Fall Entfesti-
gung (4.23) betrachtet. Durch Einsetzen von C = E, ∂f/∂σ = 1, ∂f/∂Y = −1, (4.64) fur s
und (4.66) fur K erhalt man die Beziehung fur γ zu
γ =E ε
E +K=
E ε
E − ks e−ks α. (4.75)
In diesem Beispiel ist die geschlossene Form der Darstellung der Losungsfunktionen des ge-
koppelten Systems nichtlinearer Differentialgleichungen erster Ordnung nicht moglich. Diese
Funktionen mussen durch numerische Integration der Differentialgleichungen ermittelt wer-
den.
In Abschnitt 4.1.4 wurde das Projektionsverfahren in drei Teilschritte eingeteilt. Diese Rei-
henfolge wird auch in diesem Beispiel angewandt.
Page 50
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 45
1. Formulierung der elastischen Pradiktorspannung und Pradiktorfestigkeit:
Die plastischen Zustandsvariablen εp und α werden unter Beachtung von (4.62) gemaß
(4.27) zu
εpn+1 = εp
n + γn+1 (4.76)
und unter Beachtung von (4.63) gemaß (4.28) zu
αn+1 = αn + γn+1 (4.77)
aktualisert. Das Einsetzen von (4.76) in (4.67) liefert die elastische Pradiktorspannung
σtrialn+1 aus
σn+1 = E (εn+1 − εpn+1) = E (εn+1 − εp
n)︸ ︷︷ ︸
=: σtrialn+1
−γn+1E (4.78)
fur die aktualisierte Spannung. Das Einsetzen von (4.77) in (4.61) liefert die Pradik-
torfestigkeit σtrialc,n+1 aus
σc,n+1 = σc,0 e−ks αn+1 = σc,0 e
−ks αn
︸ ︷︷ ︸
=: σtrialc,n+1
e−ks γn+1 (4.79)
fur die aktualisierte Festigkeit.
2. Uberprufung, ob σtrialn+1 die Fließbedingung verletzt:
Durch Einsetzen der Ausdrucke von σtrialn+1 und σtrial
c,n+1 in die Fließbedingung (4.60) erhalt
man
f trialn+1 = σtrial
n+1 − σtrialc,n+1 = E (εn+1 − εp
n) − σc,0 e−ks αn . (4.80)
Einsetzen von (4.78) und (4.79) in die Fließbedingung (4.60) liefert
fn+1 = σn+1 − σc,n+1 = E (εn+1 − εpn − γn+1) − σc,0 e
−ks αn e−ks γn+1 . (4.81)
Die Bedingung f trialn+1 ≥ fn+1 ist fur konvexe Fließflachen immer erfullt. Der Beweis ist
in [23], Seite 117, zu finden. Wenn f trialn+1 ≥ 0 ist, dann treten plastische Verformungen
auf. In diesem Fall sind die elastischen Pradiktorspannungen auf die Fließflache zu
projizieren, somit ist γn+1 > 0 erforderlich.
Ist f trialn+1 < 0, ist auch fn+1 < 0. Daher folgt aus den Kuhn-Tucker-Bedingungen
(4.31a) bis (4.31c) γn+1 = 0, und der Zustand zu tn+1 ist elastisch. Die Spannungen
zum Zeitpunkt tn+1 stimmen in diesem Fall mit den elastischen Pradiktorspannungen
uberein.
3. Projektion der Pradiktorspannung auf die Fließflache:
Im plastischen Fall erhalt man mit γn+1 eine zusatzliche skalare Unbekannte. Sie wird
durch die aus der dritten Kuhn-Tucker-Bedingung (4.31c) folgenden Konsistenzbe-
dingung fn+1 = 0 bestimmt.
Page 51
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 46
Im vorliegenden Beispiel stellt die Konsistenzbedingung eine nichtlineare Gleichung in
γn+1 dar. Die Losung erfolgt mittels eines iterativen Verfahrens, im vorliegenden Fall
mittels des Newton-Verfahrens.
Durch Einsetzen der Gleichung (4.78) in die Gleichung (4.81) erhalt man die erforder-
liche Form der Konsistenzbedingung zu
fn+1 = σtrialn+1 − σtrial
c,n+1 e−ks γn+1 − E γn+1 = 0 . (4.82)
Die Anwendung des Newton-Verfahrens erfordert die Ableitung der Konsistenzbe-
dingung nach der Unbekannten γn+1. Diese folgt aus (4.82) zu
d fn+1
d γn+1= ks σ
trialc,n+1 e
−ks γn+1 − E . (4.83)
Die Entwicklung von (4.82) in eine Taylor-Reihe und der Abbruch nach dem linearen
Term liefert schließlich die Grundgleichung des Newton-Verfahrens als
fn+1 ≈ fn+1(γ(k)n+1) +
d fn+1
d γn+1
∣∣∣∣γ(k)n+1
· (γ(k+1)n+1 − γ
(k)n+1) = 0 , (4.84)
wobei (k) den Zustand nach dem k-ten Iterationsschritt bezeichnet. Durch Auflosen
der Gleichung (4.84) nach der Unbekannten γ(k+1)n+1 erhalt man eine verbesserte Losung
(k + 1) zu
γ(k+1) = γ(k) − f(k)n+1
d fn+1
d γn+1
∣∣∣γ(k)n+1
. (4.85)
Diese Prozedur ist so lange zu wiederholen, bis fn+1 ≤ TOL ist. TOL ist eine vom
Anwender zu definierende Toleranz. Mit bekanntem γ(k+1)n+1 ist die Berechnung der
restlichen Großen (εpn+1, αn+1 und σn+1) zum Zeitpunkt tn+1 moglich.
Abbildung 4.3 zeigt, analog zu Abbildung 4.2, das Ergebnis des eindimensionalen Beispiels
fur Entfestigung mit den Materialparametern E = 10.0 N/mm2, Gf = 500 J/m2, `c = 1 mm
und σc,0 = 1.2 N/mm2. Die Toleranz TOL wird mit 10−12 angenommen.
Die hervorgehobene blaue Linie in Abbildung 4.2 (c) entspricht der vorgegebenen Belas-
tungsgeschichte.
In Abbildung 4.3 (e) wird anstatt der Dissipation D aus (4.69) die dissipierte spezifische
Energie oder akkumulierte Dissipation∫D dt aufgetragen.
Folgende Großen sind, wie in Unterabschnitt 4.1.5.1, in Form von Diagrammen aufgetragen:
• Graphen von (a): σ, (c): ε, εp, α und (e):∫D dt uber der Zeit
• (b): Spannungs-Verzerrungs-Beziehung
• (d): Graphen von εp und α uber der totalen Verzerrung ε
• (f): Graph von q uber der totalen Verzerrung ε bzw. der plastischen Verzerrung εp
Page 52
Theoretische Grundlagen zur Modellbildung 4.1: Plastisches Verhalten 47
0 100 200 300 400−6
−4
−2
0
2
Zeit [s]
Spa
nnun
g [N
/mm
2 ]
−0.2 0 0.2 0.4 0.6 0.8−6
−4
−2
0
2
Verzerrung ε [ ]
Spa
nnun
g [N
/mm
2 ]
0 100 200 300 400−0.5
0
0.5
1
Zeit [s]
ε , ε
P ,
α [ ]
εεP
α
−0.2 0 0.2 0.4 0.6 0.8−0.5
0
0.5
1
Verzerrung ε [ ]εp ,
α [ ]
εp
α
0 100 200 300 4000
0.1
0.2
0.3
0.4
Zeit [s]−0.2 0 0.2 0.4 0.6 0.80
0.5
1
1.5
ε , εp [ ]
σ c [N/m
m2 ]
εεp
(b)
(d)
(f)
(c)
(a)
(e)
akkum
ulier
teD
issipat
ion
[N/m
m2]
Gf
`c
Abbildung 4.3: Ergebnisse des eindimensionalen Beispiels fur Entfestigung
Aus den Diagrammen von Abbildung 4.2 lassen sich folgende Eigenschaften ablesen:
• Die Spannung σ fallt zufolge K < 0 im plastischen Bereich ab.
• Bei Entlastung bzw. Stauchung tritt keine Plastizitat auf.
• Die plastische Verzerrung εp bleibt im elastischen Bereich konstant.
• Die Raten von ε und εp besitzen im plastischen Bereich gleiches Vorzeichen.
• Die Verlaufe der inneren Variablen εp und α sind deckungsgleich.
• Die akkumulierte Dissipation∫D dt steigt nur im plastischen Bereich an.
• Die σc bleibt im elastischen Bereich konstant und fallt im plastischen Bereich ab.
• Die elastische Dehnung εe geht mit zunehmendem α gegen null.
Page 53
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 48
4.2 Bruchumhullende nach Tsai und Wu
In diesem Unterkapitel wird die fur das konstitutive Modellieren von Holz verwendete Fließ-
flache vorgestellt. Die elliptische Flache nach Tsai und Wu [24] stellt eine derartige fur
orthotrope Werkstoffe gut geeignete, mathematische Beschreibung von Fließ- bzw. Bruch-
spannungszustanden dar. Fur das zu entwickelnde Materialmodell ist die Veranderbarkeit
der Form der Fließflache erforderlich. Nach der mathematischen Diskussion der Fließflache
und der Festlegung von Evolutionsgesetzen fur charakteristische Festigkeitswerte werden
mittels eines Iterationsverfahrens die Parameter der Fließflache geeignet ermittelt.
4.2.1 Grundlagen
4.2.1.1 Mathematische Grundlagen
Um die Ergebnisse der experimentellen Untersuchungen, vom Faserwinkel ϕ abhangig, ver-
gleichen zu konnen, ist es erforderlich einen Satz von polynominal unabhangiger orthotroper
Invarianten zu identifizieren. Da fur das vorliegende Problem ausschließlich die LR-Ebene
betrachtet wird (Materialhauptsystem) bzw. der Winkel ϕ in der LR-Ebene gemessen wird,
verwendet man die Einheitsvektoren
AL(ϕ) =
cosϕ
sinϕ
0
, AR(ϕ) =
− sinϕ
cosϕ
0
und AT =
0
0
1
(4.86)
zur Beschreibung der Langsrichtung L (parallel zur Faserrichtung), der Radialrichtung R
(quer zur Faser) und der Tangentialrichtung T des Stammes. Die unterschiedlichen Richtun-
gen sind in Abbildung 3.2 dargestellt. Die Strukturtensoren Mi, i ∈ L, R, T lassen sich
aus den Einheitsvektoren Ai wie folgt ermitteln (siehe Mackenzie-Helnwein et al. [11]):
ML = AL ⊗ AL , MR = AR ⊗ AR und MT = AT ⊗ AT . (4.87)
Damit lassen sich die orthotropen Invarianten im dreidimensionalen Fall als
tr σ Mi = Ai σ Ai = σii , trσ2 Mi = Ai σ σ Ai und det σ = III (4.88)
fur i ∈ L, R, T darstellen. Somit enthalt die Integritatsbasis fur orthotrope Materialien
sieben Invariante. Bei Beschrankung auf ebene Beanspruchungszustande reduziert sich die
Anzahl der irreduziblen orthotropen Invarianten auf drei (siehe Betten [1]).
Diese folgen aus Gleichung (4.88) zu
σL = tr σ ML, σR = trσ MR und τ 2LR = tr σ MR σ ML . (4.89)
Diese lassen sich als die Normalspannungskomponenten und das Quadrat der Schubspan-
nung in einem durch die Vektoren AL und AR aufgespannten lokalen Koordinatensystem
identifizieren. Die zugehorigen Invarianten des Verzerrungstensors ε erhalt man analog zu
εL = tr εML, εR = tr εMR und γ2LR = 4 ε2
LR = 4 tr εMR εML . (4.90)
Page 54
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 49
Die mathematische Beschreibung von orthotropen Materialien erfordert die Verwendung
von Tensoren zweiter Stufe (σ und ε) und vierter Stufe (C). In der Kontinuumsmechanik
besitzen diese Tensoren Symmetrieeigenschaften. Deshalb wird im Folgenden anstatt der
Tensorschreibweise die Matrizenschreibweise verwendet. Zweidimensionale Tensoren zweiter
Stufe werden zu einem Vektor, dreidimensionale Tensoren vierter Stufe zu einer Matrix
umgeordnet.
Bei Betrachtung der jeweils dritten Terme der Gleichungen (4.89) und (4.90) fallt der Faktor 4
bei der Ermittlung der Invarianten γ2LR auf. Der Faktor 4 ergibt sich durch die Verwendung
der Gleitung γLR anstelle der Tensorkomponente εLR und deren Zusammenhang γLR = 2 εLR.
4.2.1.2 Definition der Bruchumhullenden
Als Bruchumhullende wird im Folgenden die, fur orthotrope Werkstoffe gut geeignete, ma-
thematische Beschreibung von Bruchspannungszustanden von Tsai und Wu [24] verwendet.
In Eberhardsteiner [5] wird diese Bruchumhullende auf ein Tensorpolynom 2. Ordnung
beschrankt. Die mathematische Beschreibung des Bruchkriteriums kann wie folgt dargestellt
werden:
f(σ, p) = a : σ + σ : b : σ − 1 = 0 . (4.91)
Darin bezeichnen a und b orthotrope Parametertensoren, die durch einen Satz p von skalaren
Parametern bestimmt werden. Aufgrund der Orthotropie des Holzes und der Beschrankung
der Beanspruchung auf ebene Spannungszustande in der LR-Ebene reduziert sich die Anzahl
der unabhangigen Komponenten der Tensoren a und b von zwolf auf sechs.
a und b sind konstante orthotrope Tensoren zweiter und vierter Stufe. Die Koeffizienten aij
besitzen die Einheit mm2/N , die Koeffizienten bijkl die Einheit mm4/N2 (i, j, k, l ∈ L,R).Sie stellen Materialparameter dar. Im Folgenden werden diese Koeffizienten in einem Vektor
p zusammengefasst:
p = baLL aRR bLLLL bRRRR bLLRR bLRLRcT . (4.92)
In Invarianten angeschrieben, lautet die Funktion der Bruchumhullenden nach (4.91)
f(σ, p) = aRR σR + aLL σL + bRRRR σ2R + bLLLL σ
2L + 2 bLLRR σR σL + 4 bLRLR τ
2LR − 1 = 0 .
(4.93)
Der Vergleich von Gleichung (4.91) und (4.93) liefert die Definition von a und b zu
a(p) = aLL ML + aRR MR und (4.94a)
b(p) = bLLLL ML ⊗ ML + bRRRR MR ⊗ MR +
+ bLLRR (MR ⊗ ML + ML ⊗ MR) + bLRLR M , (4.94b)
wobei
M = (AL ⊗ AR + AR ⊗ AL) ⊗ (AL ⊗ AR + AR ⊗ AL) (4.95)
ein Strukturtensor vierter Stufe ist.
Page 55
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 50
Im Materialhauptsystem nehmen a und b folgende Form an:
a(p) =
aLL
aRR
0
, b(p) =
bLLLL bLLRR 0
bLLRR bRRRR 0
0 0 4 bLRLR
. (4.96)
Zur Ubersichtlichkeit wird auch die Bruchbedingung (4.91) in Matrixform angeschrieben.
Man erhalt diese zu
f =
aLL
aRR
0
T
·
σL
σR
τLR
+
σL
σR
τLR
T
·
bLLLL bLLRR 0
bLLRR bRRRR 0
0 0 4 bLRLR
·
σL
σR
τLR
− 1 = 0 .
(4.97)
Aufgrund der Symmetrie des Spannungstensors σ und des Verzerrungstensors ε werden diese,
wie in Gleichung (4.97) bereits angewandt, durch Spaltenvektoren dargestellt.
Um numerischen Instabilitaten vorzubeugen, sollen die Bruchumhullende bzw. in weiterer
Folge die Fließflache geschlossene Flachen sein. Man erhalt aus (4.91) eine geschlossene,
elliptische Flache, wenn folgende Ungleichungen erfullt sind:
bLRLR > 0 , bLLLL > 0 und bLLLL bRRRR − b2LLRR > 0 . (4.98)
Gleichung (4.98) besagt, dass b positiv definit sein muss.
4.2.1.3 Aktualisierung der assoziierten Fließregel
In Unterkapitel 4.1 wurde mit Gleichung (4.9) die assoziierte Fließregel aufgestellt. Fur das
verwendete Modell gemaß Gleichungen (4.91) und (4.93) erhalt man aus (4.9)
εp = γ r , (4.99)
wobei
r =∂f
∂σ= a + 2b : σ =
aLL + 2 bLLLL σL + 2 bLLRR σR
aRR + 2 bLLRR σL + 2 bRRRR σR
8 bLRLR τLR
(4.100)
ein symmetrischer Tensor zweiter Stufe ist. Die Vektordarstellung in (4.100) gilt ausschließ-
lich fur das Materialhauptsystem. In diesem hat r die Koordinaten
r =
∂f∂σL
12
∂f∂τLR
12
∂f∂τLR
∂f∂σR
=:
r112 r3
12 r3 r2
. (4.101)
Wegen der Symmetrie von r wird in Folge die aquivalente Vektordarstellung
~r =
r1r2r3
(4.102)
verwendet. Wenn keine Gefahr der Verwechslung besteht, wird auf den Pfeil von ~r in (4.102)
verzichtet.
Page 56
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 51
4.2.1.4 Erlauterung des Mehrflachenmodells nach Mackenzie-Helnwein et al.
In [12] wird ein orthotropes Mehrflachenplastizitatsmodell fur Holz beschrieben. Auf der
Basis der in Unterkapitel 2.4 beschriebenen Grundarten des Versagens werden vier Flachen
definiert, die zusammen ein Vierflachenmodell ergeben. Die generalisierte Form der vier
Fließbedingungen lautet in Tensorschreibweise:
fi(σ, qi, Yi) = ai : σ + σ : bi : σ + qi − Yi = 0, i ∈ 1, 2, 3, 4 , (4.103)
wobei ai und bi jeweils konstante Tensoren zweiter und vierter Stufe sind. qi beschreibt das
entsprechende Verfestigungsgesetz und Yi ist eine Festigkeitsfunktion. Mittels qi und Yi wird
das Verhalten der einzelnen Flachen kontrolliert. Da die Fließflache aus mehreren Teilflachen
besteht, ergeben die Schnittpunkte bzw. Verschneidungslinien dieser Teilflachen Ecken bzw.
Kanten. In diesem Fall ist der Gradient der Fließflache in solchen Punkten nicht eindeutig
definiert. Die assoziierte Fließregel fur derartige Punkte auf einer nicht-glatten Fließflache
erhalt man nach Simo und Hughes [23] durch eine Erweiterung von (4.9).
Um numerische Probleme, die durch das Vorhandensein von Ecken und Kanten auf der
Fließflache auftreten konnen, auszuschalten, definiert man das Bruchkriterium von Tsai
und Wu als Einflachenplastizitatsmodell. Die Ver- bzw. Entfestigung im Mehrflachenmodell
wird durch Verformung des Einflachenmodells, zufolge Anderung von p, dargestellt. Die
Charakteristik der auftretenden Großen im Mehrflachenmodell
ai , bi , qi(α) , Yi(α), i ∈ 1, 2, 3, 4 (4.104)
verandert sich beim Ubergang auf ein Einflachenmodell zu:
a(α) , b(α) , q = 0 , Y = 1 . (4.105)
Somit werden q und Y konstant gehalten und die Tensoren a(α) und b(α) verandert.
4.2.1.5 Definition der Fließflache
Um aus der Bruchumhullenden eine Fließflache zu erhalten, ist eine Anderung der Materi-
alparameter erforderlich.
Mittels der in Unterkapitel 2.4 diskutierten biaxialen Versuche stellt man fest, dass sich die
einaxialen Festigkeiten der zu definierenden Fließflache reduzieren bzw. gleich bleiben. Das
beobachtete Materialverhalten fuhrt zu folgenden Anderungen:
• Bei Zugbeanspruchung tritt sprodes Versagen ein. Die Zugfestigkeiten der Bruchum-
hullenden entsprechen deshalb den Zugfestigkeiten der zu definierenden Fließflache.
• Bei Druckbeanspruchung quer zur Faser tritt duktiles Verhalten auf. Die Druckfestig-
keit quer zur Faser βc,⊥ wird deshalb zu reduzieren sein.
Page 57
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 52
Etwaige Streuungen in den Versuchsdaten sind bei der Festlegung der einaxialen Festigkei-
ten zusatzlich zu berucksichtigen. Um die einaxialen Festigkeiten in Abhangigkeit von den
Materialparametern p zu erhalten, ist eine Kurvendiskussion der Fließflache erforderlich. Im
Abschnitt 4.2.2 wird diese durchgefuhrt.
4.2.2 Kurvendiskussion des Hauptschnitts des Ellipsoids
Die Gleichung des Schnittes des Ellipsoids nach Tsai und Wu mit der σL-σR-Ebene (τLR =
0) lautet:
f = aRR σR + aLL σL + bRRRR σ2R + bLLLL σ
2L + 2 bLLRR σR σL − 1 = 0 . (4.106)
Dieser Hauptschnitt des Ellipsoids veranschaulicht die fur Holz charakteristische unterschied-
liche Festigkeit unter Zug- und Druckbeanspruchung parallel und normal zur Faserrichtung.
Um eine, auf Extremwerte von Festigkeiten beruhende Gestaltsanderung des Ellipsoids zu
kontrollieren, benotigt man entsprechende mathematische Ausdrucke fur Achsenschnitt-
punkte und Extremwerte des Ellipsoids. Diese werden im Folgenden hergeleitet.
Abbildung 4.4 veranschaulicht die Aufgabenstellung. Zur Ubersichtlichkeit werden Punkte
am Hauptschnitt des Ellipsoids festgelegt. Die Punkte 1 bis 4 markieren die einaxialen
Festigkeiten, die als Achsenschnittpunkte der Ellipse identifiziert sind. Die Punkte 5 bis 8
markieren die Extrema der Festigkeiten. Zusatzlich sind die Neigungswinkel von Referen-
zachsen φ∗ und φ∗∗ eingetragen.
Erste Referenzachse
Zweite Referenzachse
σR
φ∗
f = 0
5 = max βc,⊥
6 = max βt,⊥
3 = βt,‖
7 = max βt,‖
σL
φ∗∗
βc,⊥ = 2
βc,‖ = 4
max βc,‖ = 8
βt,⊥ = 1
Abbildung 4.4: Festlegung von Punkten auf dem Hauptschnitt des Ellipsoids
Page 58
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 53
• Ermittlung der einaxialen Festigkeiten in Radialrichtung
Durch Einsetzen des Spannungszustandes σL = τLR = 0, σR = β⊥ in die Fließbedin-
gung (4.93) erhalt man
f = aRR β⊥ + bRRRR β2⊥ − 1 = 0 ⇒ β⊥ =
−aRR ±√
a2RR + 4 bRRRR
2 bRRRR
. (4.107)
Mittels Gleichung (4.107) sind die Punkte 1 und 2 in Abbildung 4.4 definiert.
• Ermittlung der einaxialen Festigkeiten in Langsrichtung
Durch Einsetzen des Spannungszustandes σR = τLR = 0, σL = β‖ in die Fließbedingung
(4.93) erhalt man
f = aLL β‖ + bLLLL β2‖ − 1 = 0 ⇒ β‖ =
−aLL ±√
a2LL + 4 bLLLL
2 bLLLL
. (4.108)
Mittels Gleichung (4.108) sind die Punkte 3 und 4 in Abbildung 4.4 definiert.
• Bildung des Differentials df von f = f(σL, σR, τLR = 0))
Da die Fließflache durch f = 0 definiert ist, verschwindet das zugehorige Differential df .
Man erhalt es aus der allgemeinen Form f = f(σL, σR, τLR)) zu
df =∂f
∂σL
dσL +∂f
∂σR
dσR = 0 , (4.109)
bzw. aus (4.93) zu
df = dσL (aLL + 2 bLLLL σL + 2 bLLRR σR) +
+ dσR (aRR + 2 bLLRR σL + 2 bRRRR σR) = 0 . (4.110)
Der Vergleich von Gleichung (4.109) und Gleichung (4.110) liefert:
∂f
∂σR= aRR + 2 bLLRR σL + 2 bRRRR σR , (4.111a)
∂f
∂σL= aLL + 2 bLLLL σL + 2 bLLRR σR . (4.111b)
• Ermittlung der Tangentenneigung an einer beliebigen Stelle der Ellipse
Aus df = 0 folgt
df =∂f
∂σLdσL +
∂f
∂σRdσR = 0 ⇒ dσR
dσL= −
∂f∂σL
∂f∂σR
. (4.112)
Durch Einsetzen der Gleichungen (4.110) und (4.111a) in (4.112) erhalt man die Tan-
gentenneigung in einem Punkt (σL, σR, τLR = 0) mit f = f(σL, σR, τLR = 0)) zu
dσR
dσL= − aLL + 2 bLLLL σL + 2 bLLRR σR
aRR + 2 bLLRR σL + 2 bRRRR σR. (4.113)
Page 59
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 54
• Bestimmung der Neigung der ersten Referenzachse der Ellipse
Als erste Referenzachse wird im Folgenden jener Durchmesser der Ellipse bezeichnet,
der die beiden Extremwerte der Spannungen in Langsrichtung (Punkte 7 und 8 in Ab-
bildung 4.4) verbindet. Die Gleichung der ersten Referenzachse wird durch Nullsetzen
von Gleichung (4.111a) und anschließendem Umformen zu
σR = − aRR
2 bRRRR− bLLRR
bRRRRσL (4.114)
erhalten. Ihre Neigung folgt durch Ableiten von (4.114) nach σL zu
tanφ∗,0 =dσR
dσL
= − bLLRR
bRRRR
. (4.115)
• Bestimmung der Neigung der zweiten Referenzachse der Ellipse
Als zweite Referenzachse wird im Folgenden jener Durchmesser der Ellipse bezeich-
net, der die beiden Extremwerte der Spannungen in Radialrichtung (Punkte 5 und
6 in Abbildung 4.4) verbindet. Die Gleichung der zweiten Referenzachse wird durch
Nullsetzen von Gleichung (4.111b) und anschließendem Umformen zu
σL = − aLL
2 bLLLL− bLLRR
bLLLLσR (4.116)
erhalten. Ihre Neigung folgt durch Ableiten von (4.116) nach σR zu
tanφ∗∗,0 =dσL
dσR
= −bLLRR
bLLLL
. (4.117)
• Einfuhrung von Abkurzungen X und Z
Zur Vereinfachung der weiteren Ausdrucke werden folgende Abkurzungen eingefuhrt:
Z = bLLLL bRRRR − b2LLRR , (4.118)
X =√
a2RR bLLLL − 2 aLL aRR bLLRR + a2
LL bRRRR + 4Z . (4.119)
Fur eine elliptische Flache gilt immer Z > 0 (vergleiche (4.98)).
• Extremwerte der Festigkeiten in Radialrichtung
Die Forderung einer Tangente parallel zur σL-Achse lautet
∂f
∂σL= aLL + 2 bLLRR σL + 2 bLLLL σL = 0 . (4.120)
Durch Auflosen nach σR erhalt man
σR = −aLL + 2 bLLLL σL
2 bLLRR
. (4.121)
Page 60
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 55
Gleichung (4.121) wird in die Gleichung der Ellipse (4.106) eingesetzt. Nach der Um-
formung und der Verwendung der Abkurzungen (4.118) und (4.119) erhalt man die
Lage der Extremwerte auf der σL-Achse zu
σL =
aRR bLLRR − aLL bRRRR ± bLLRR√
bLLLL
X
2Z. (4.122)
Dieses Ergebnis wird in Gleichung (4.121) eingesetzt und liefert die Extremwerte der
Festigkeiten in Radialrichtung zu
max β⊥ = −aRR bLLLL − aLL bLLRR ±√bLLLLX
2Z. (4.123)
Mittels der Gleichungen (4.122) und (4.123) ist die Lage der Extremwerte fur σR fest-
gelegt. Die Punkte 5 und 6 der Ellipse in Abbildung 4.4 markieren diese Extremwerte.
• Extremwerte der Festigkeiten in Langsrichtung
Die Forderung einer Tangente parallel zur σR-Achse lautet
∂f
∂σR= aRR + 2 bLLRR σL + 2 bRRRR σR = 0 . (4.124)
Durch Auflosen nach σL erhalt man
σL = −aRR + 2 bRRRR σR
2 bLLRR. (4.125)
Gleichung (4.125) wird in die Gleichung der Ellipse (4.106) eingesetzt. Nach der Um-
formung und der Verwendung der Abkurzungen (4.118) und (4.119) erhalt man die
Lage der Extremwerte auf der σR-Achse zu
σR = −aRR bLLLL − aLL bLLRR ± bLLRR√
bRRRR
X
2Z. (4.126)
Dieses Ergebnis wird nun in Gleichung (4.125) eingesetzt und liefert die Extremwerte
der Festigkeiten in Langsrichtung zu
max β‖ =aRR bLLRR − aLL bRRRR ±
√bRRRR X
2Z. (4.127)
Mittels der Gleichungen (4.126) und (4.127) ist die Lage der Extremwerte fur σL fest-
gelegt. Die Punkte 7 und 8 der Ellipse in Abbildung 4.4 markieren diese Extremwerte.
• Maximale Schubfestigkeit max τLR
Der Extremwert der Schubfestigkeit ist durch eine Tangentialebene an die Fließflache,
die zur σL-σR-Ebene parallel ist, gekennzeichnet.
Page 61
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 56
Mathematisch bedeutet dies, dass das Differential von f(σL, σR, τLR) nach (4.93) unter
der Nebenbedingung dτLR = 0 verschwinden muss. Das ist gleichbedeutend mit dem
gleichzeitigen Verschwinden der partiellen Ableitungen (4.111a) und (4.111b). Diese
partiellen Ableitungen bilden ein 2×2-Gleichungssystem in den Unbekannten σL und
σR. Die Losung dieses Gleichungssystems liefert
σ∗L =
aRR bLLRR − aLL bRRRR
2Zund σ∗
R =aLL bLLRR − aRR bLLLL
2Z. (4.128)
Durch Einsetzen der Beziehungen (4.128) in die Gleichung (4.93) erhalt man das Ma-
ximum der Schubspannung zu
max τ 0LR =
X
4√bLRLR Z
. (4.129)
• Ideeller Reibungswinkel φ
Schließlich wird noch eine Beziehung fur den ideellen Reibungswinkel in Abhangig-
keit der Parameter des Ellipsoids hergeleitet. Aus Abbildung 4.5 entnimmt man den
Zusammenhang
max τ 0LR −
max β0t,⊥ + max β0
c,⊥
2tanφ0 = 0 . (4.130)
σR
φ0 maxβ0
t,⊥
max τ 0
LR
τLR
maxβ0
t,⊥ + maxβ0
c,⊥
maxβ0
t,⊥ + maxβ0
c,⊥
2
maxβ0
t,⊥maxβ0
c,⊥
maxβ0
c,⊥
maxβ0
t,⊥ + maxβ0
c,⊥
2
Abbildung 4.5: Zusammenhang zwischen φ und der Schubfestigkeit max τ 0LR
Durch Einsetzen der Beziehung (4.123) mit positivem Vorzeichen fur max β0t,⊥, der Be-
ziehung (4.123) mit negativem Vorzeichen fur max β0c,⊥ sowie der Beziehung (4.129) fur
max τ 0LR fuhrt zu einer Beziehung, die nur von den Parametern des Ellipsoids abhangt.
Damit kann ein ideeller Reibungswinkel φ mittels der Parameter des Ellipsoids als
φ = arctan2 max τLR
max βt,⊥ + max βc,⊥= arctan
X√Z
2 (aLL bLLRR − aRR bLLLL)√bLRLR
(4.131)
ermittelt werden.
Page 62
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 57
4.2.2.1 Auswertung fur den initialen Parametersatz
Als initialer Parametersatz p0 wird im Folgenden jener Satz von Parametern bezeichnet, der
von Eberhardsteiner [5] angegeben wurde. Die Darstellung der daraus definierten Bruch-
umhullenden im orthotropen Spannungsraum liefert ein Ellipsoid, charakterisiert durch die
Gleichung (4.93). Es ist in Abbildung 4.6 dargestellt.
Abbildung 4.6: Darstellung des Ellipsoids fur den initialen Parametersatz p0
Der initiale Parametersatz lautet
p0 =
aLL
aRR
bLLLL
bRRRR
bLLRR
bLRLR
=
−0.007013160 mm2/N
+0.066018200 mm2/N
+0.000260280 mm4/N2
+0.034662500 mm4/N2
+0.000241602 mm4/N2
+0.003670630 mm4/N2
. (4.132)
Die Tabelle 4.1 fasst die Auswertung der in der Kurvendiskussion definierten Punkte 1 bis 8
der Ellipse fur den initialen Parametersatz p0 nach (4.132) zusammen.
Tabelle 4.1: Koordinatenverzeichnis der Punkte aus der Kurvendiskussion fur p0
Punkt Nr. σL σR Punkt Nr. σL σR
Punkt 1 0 +4.50 Punkt 5 +19.66 -6.67
Punkt 2 0 -6.41 Punkt 6 +9.24 +4.56
Punkt 3 +76.90 0 Punkt 7 +79.24 -1.50
Punkt 4 -49.96 0 Punkt 8 -50.33 -0.60
Page 63
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 58
In Tabelle 4.2 sind die charakteristischen Werte fur den initialen Parametersatz p0 nach
(4.132) zusammengefasst.
Tabelle 4.2: Zusammenstellung charakteristischer Werte fur den Parametersatz p0
max β0t,⊥ = 4.56 N/mm2 max β0
c,⊥ = 6.67 N/mm2
max β0t,‖ = 79.24 N/mm2 max β0
c,‖ = 50.33 N/mm2
max τ 0LR = 8.60 N/mm2 σ∗
R = -1.05 N/mm2
φ0 = 57.6073 tanφ∗,0 = -0.0069701
Abbildung 4.7 stellt die Punkte 1 bis 8 maßstablich im σL-σR-Koordinatensystem dar.
−60 −40 −20 0 20 40 60 80−20
−10
0
10
20
σL [N/mm2]
σ R [N
/mm
2 ]
Tsai & Wu f=0erste Referenzachsezweite Referenzachse1 6
4
8 2 5
7
3
Abbildung 4.7: Charakteristische Punkte fur initiale Parameterwerte p0
Page 64
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 59
4.2.2.2 Auswertung fur den modifizierten Parametersatz
Mittels den Aussagen aus Unterabschnitt 4.2.1.5 und dem Modell nach [12] fuhrt man fol-
gende Anderungen zur in [5] vorgeschlagenen Bruchumhullenden ein:
βt,‖ = 65.0 N/mm2 und βc,⊥ = 4.0 N/mm2 . (4.133)
Darin bezeichnet βt,‖ die einaxiale Zugfestigkeit parallel zur Faserrichtung gemaß (4.108) mit
positivem Vorzeichen und βc,⊥ die einaxiale Druckfestigkeit quer zur Faser gemaß (4.107)
mit negativem Vorzeichen. Die einaxialen Festigkeiten der anderen Richtungen sind bei
der Bruch- und der neu eingefuhrten Fließflache ident. Die daraus erhaltene Fließflache
entspricht einem Einflachenmodell, gemaß Gleichung (4.91).
Als modifizierter Parametersatz p1 wird im Folgenden jener Satz von Parametern bezeich-
net, der sich zufolge der in (4.133) dargelegten Randbedingungen ergibt. Die Darstellung
der Fließflache im orthotropen Spannungsraum liefert weiterhin ein Ellipsoid, wie in Abbil-
dung 4.8 dargestellt.
Abbildung 4.8: Darstellung des Ellipsoids fur den modifizierten Parametersatz p1
Der modifizierte Parametersatz lautet
p1 =
aLL
aRR
bLLLL
bRRRR
bLLRR
bLRLR
=
−0.004725456 mm2/N
−0.030672450 mm2/N
+0.000309383 mm4/N2
+0.054853200 mm4/N2
+0.000382334 mm4/N2
+0.003452340 mm4/N2
. (4.134)
Page 65
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 60
Die Tabelle 4.3 fasst die Auswertung der in der Kurvendiskussion definierten Punkte 1 bis 8
der Ellipse fur den modifizierten Parametersatz p1 nach (4.134) zusammen.
Tabelle 4.3: Koordinatenverzeichnis der Punkte aus der Kurvendiskussion fur p1
Punkt Nr. σL σR Punkt Nr. σL σR
Punkt 1 0 +4.56 Punkt 5 +12.71 -4.10
Punkt 2 0 -4.00 Punkt 6 +2.00 +4.56
Punkt 3 +65.00 0 Punkt 7 +65.05 -0.17
Punkt 4 -49.73 0 Punkt 8 -50.34 +0.63
In Tabelle 4.4 sind die charakteristischen Werte fur den initialen Parametersatz p1 nach
(4.134) zusammengefasst.
Tabelle 4.4: Zusammenstellung charakteristischer Werte fur den Parametersatz p1
max β0t,⊥ = 4.56 N/mm2 max β0
c,⊥ = 4.10 N/mm2
max β0t,‖ = 65.05 N/mm2 max β0
c,‖ = 50.34 N/mm2
max τ 0LR = 8.60 N/mm2 σ∗
R = +0.23 N/mm2
φ0 = 63.5426 tanφ∗,0 = -0.0069701
Abbildung 4.9 stellt die Punkte 1 bis 8 maßstablich im σL-σR-Koordinatensystem dar.
−60 −40 −20 0 20 40 60 80−20
−10
0
10
20
σL [N/mm2]
σ R [N
/mm
2 ]
Tsai & Wu f=0erste Referenzachsezweite Referenzachse6 1
8
4 2 5
3
7
Abbildung 4.9: Charakteristische Punkte fur modifizierte Parameterwerte p1
Page 66
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 61
4.2.3 Evolutionsgesetze fur charakteristische Festigkeiten fur die
vier Versagensmechanismen nach Mackenzie-Helnwein et al.
Bei Annahme assoziierter Verfestigung gemaß Gleichung (4.10) wurde das Einflachenmodell
nur einen Verfestigungsparameter zulassen. Die Form der Fließflache wurde sich in alle Richt-
ungen ahnlich verandern. Dies widerspricht dem in [12] beschriebenen Materialverhalten.
Somit ist es erforderlich, nicht assoziierte Ver- und Entfestigungsgesetze zu formulieren.
Dies wird dadurch bewerkstelligt, dass anstelle einer assoziierten Verfestigungsvariablen α
ein Vektor
α = bαt,⊥ αc,⊥ αt,‖ αc,‖ αref αshrcT (4.135)
definiert wird. Die Komponenten von α steuern die Extrema der Festigkeitswerte und somit
die Gestalt der Fließflache. Die mathematische Form der Fließflache (4.91) selbst bleibt bei
beliebiger Beanspruchung unverandert.
In diesem Abschnitt werden sechs Evolutionsgesetze fur die folgenden Festigkeiten und die
Neigung der betrachteten Referenzachse formuliert:
1. Maximale Zugfestigkeit in Radialrichtung max βt,⊥
2. Minimale Druckfestigkeit in Radialrichtung max βc,⊥
3. Maximale Zugfestigkeit in Langsrichtung max βt,‖
4. Minimale Druckfestigkeit in Langsrichtung max βc,‖
5. Neigung der ersten Referenzachse der Ellipse tanφ∗
6. Maximale Schubfestigkeit max τLR
Mit Hilfe von [12] werden fur alle Komponenten des Vektors der inneren Variablen αi ∈ (t,⊥), (c,⊥), (t, ‖), (c, ‖), (ref), (shr) die Zusammenhange mit der Plastizitatstheorie hergestellt.
4.2.3.1 Maximale Zugfestigkeit in Radialrichtung max βt,⊥
Fur reinen Querzug findet man in [12] folgende Beziehung:
ξI =`c βt,⊥
GIf,R
〈MR : r〉 γ︸ ︷︷ ︸
=: αt,⊥
, (4.136)
wobei der Strukturtensor MR laut Gleichung (4.87) einzusetzen ist. Der Tensor r entspricht
der Richtung des plastischen Flusses aus dem Mehrflachenmodell. Fur Zug in Radialrichtung
stimmt diese naherungsweise mit jener aus dem Einflachenmodell uberein. Deshalb wird in
Folge r gemaß Gleichung (4.100) verwendet. Grundlage fur die folgenden Betrachtungen
stellt das Modell nach Weihe (siehe [25], [26] und [27]) dar.
Page 67
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 62
GIf,R ist die Energiefreisetzungsrate und `c ist die charakteristische Lange. Der Index I
bezeichnet den Bruchmodus (Mode I) und zeigt an, dass die Kraftwirkung normal zur Riss-
richtung verlauft. Mittels des von Weihe [25] angegebenen Entfestigungsgesetzes
βt,⊥ = κ β0t,⊥ = (1 − ξI) β
0t,⊥ (4.137)
erhalt man aus (4.136) eine inhomogene Differentialgleichung erster Ordnung in der Unbe-
kannten ξI zu
ξI +`c β
0t,⊥
GIf,R
︸ ︷︷ ︸
=: kt,⊥
αt,⊥ ξI =`c β
0t,⊥
GIf,R
︸ ︷︷ ︸
=: kt,⊥
αt,⊥ , (4.138)
wobei kt,⊥ einen konstanten Materialparameter bezeichnet. Er entspricht dem aus der Ener-
giebilanz im Zuge der Rissbildung abgeleiteten Parameter ks gemaß (4.74). Fur abschnitts-
weises konstantes αt,⊥ erhalt man die Losung dieser Differentialgleichung zu
ξI = Ae−kt,⊥ αt,⊥ t + 1 . (4.139)
Durch Annahme von αt,⊥ t = αt,⊥ erhalt man eine Naherungslosung fur veranderliches αt,⊥.
Die unbekannte Integrationskonstante A erhalt man durch Einsetzen der Anfangsbedingung
ξI |αt,⊥=0 = 0 in (4.139) zu A = −1. Somit ergibt sich
ξI = 1 − e−kt,⊥ αt,⊥. (4.140)
Durch Einsetzen von (4.140) in (4.137) erhalt man schließlich das Entfestigungsgesetz
βt,⊥ = β0t,⊥ e
−kt,⊥ αt,⊥ . (4.141)
Die Evolution der maximalen Zugfestigkeit in Radialrichtung wird somit mittels des analogen
Exponentialgesetzes
max βt,⊥(αt,⊥) = max β0t,⊥ e
−kt,⊥ αt,⊥ (4.142)
vorgegeben, wobei max β0t,⊥ die initiale maximale Zugfestigkeit bezeichnet. Die innere Va-
riable αt,⊥ dient ausschließlich zur Beschreibung der betrachteten Festigkeit und ergibt sich
aus Gleichung (4.136) mit
αt,⊥ = 〈MR : r〉 γ . (4.143)
Der Materialparameter kt,⊥ folgt aus (4.138) zu
kt,⊥ =max β0
t,⊥ `c
GIf,R
. (4.144)
Abbildung 4.10 veranschaulicht die Entwicklung von max βt,⊥ fur max β0t,⊥ = 4.56 N/mm2,
GIf,R = 300 J/m2 und `c = 5 mm, in dem die innere Variable αt,⊥ als Laufvariable gewahlt
wird.
Page 68
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 63
0 0.02 0.04 0.06 0.08 0.10
1
2
3
4
5
αt,⊥ [ ]
max
βt,⊥
(αt,⊥
) [N
/mm
2 ]
Abbildung 4.10: Verlauf des Evolutionsgesetzes fur max βt,⊥
4.2.3.2 Maximale Druckfestigkeit in Radialrichtung max βc,⊥
Die maximale Druckfestigkeit in Radialrichtung wird durch
max βc,⊥(αc,⊥) = Y0,⊥ + Y1,⊥ (1 − e−kc,⊥ αc,⊥) + qR(αc,⊥) (4.145)
beschrieben. Dabei bezeichnet Y0,⊥ = max β0c,⊥ die ursprungliche Druckfestigkeit, Y1,⊥ ist
eine Verfestigungsspannung, die durch das exponentielle Gesetz im plastischen Bereich die
Festigkeit vergroßert. kc,⊥ ist ein dimensionsloser Materialparameter.
Die Funktion qR(αc,⊥) in Gleichung (4.145) dient zur Beschreibung der Kompaktion und
des damit verbundenen Festigkeitsanstiegs. Die Kompaktion reduziert das freie Zellvolumen
auf ein praktisch nicht weiter reduzierbares Minimum und fuhrt zum Aufbau innerer Span-
nungen, die zu keiner Erhohung der Dissipation fuhren. Die Steigerung der Festigkeit wird
durch
qR(αc,⊥) = HR,d〈αc,⊥ − αR,d〉2αR,∞ − αc,⊥
(4.146)
beschrieben. Es gilt 〈x〉 = (x + |x|)/2. HR,d ist ein Verfestigungsparameter. αR,d und αR,∞
bezeichnen den Beginn und den Grenzfall der Kompaktion, wobei αc,⊥ < αR,∞ gilt.
Die innere Variable αc,⊥ dient ausschließlich der Beschreibung der betrachteten Festigkeit.
Fur dominante Druckbeanspruchung quer zur Faser findet man in [11] und [12] folgende
Beziehungen fur die Rate der plastischen Verzerrungen
εp = γ
[
−(MR + cML) +µ
2M σ
]
(4.147)
und eines zugehorigen Verfestigungsparameters
α = γ . (4.148)
Durch Zerlegung von εp in seine Komponenten erhalt man
εpR = MR : ε
p = −γ . (4.149)
Page 69
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 64
Der Vergleich von (4.149) mit (4.148) fuhrt auf
α = 〈−εpR〉 = 〈−MR : ε
p〉 . (4.150)
Dieser Zusammenhang wird nun fur das vorliegende Einflachenmodell zur Definition von
αc,⊥ unter Verwendung von (4.99) herangezogen und liefert
αc,⊥ = 〈−MR : εpR〉 = γ 〈−MR : r〉 . (4.151)
Abbildung 4.11 veranschaulicht die Entwicklung von max βc,⊥ fur max β0c,⊥ = 4.10 N/mm2,
Y1,R = 1.80 N/mm2 und kc,⊥ = 30.00, in dem die innere Variable αc,⊥ als Laufvariable
gewahlt wird. Die volle Linie stellt die Berucksichtigung der Kompaktion fur HR,d = 2.00
N/mm2, αR,d = 0.10 und αR,∞ = 0.75 dar. Die strichlierte Linie berucksichtigt diese nicht.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
5
10
15
20
αc,⊥ [ ]
max
βc,
⊥(α
c,⊥)
[N/m
m2 ]
Abbildung 4.11: Verlauf des Evolutionsgesetzes fur max βc,⊥
4.2.3.3 Maximale Zugfestigkeit in Langsrichtung max βt,‖
Die maximale Zugfestigkeit in Langsrichtung wird durch
max βt,‖(αt,‖) = max β0t,‖ e
−kt,‖ αt,‖ (4.152)
beschrieben, wobei max β0t,‖ die initiale maximale Zugfestigkeit bezeichnet. Die Energiebilanz
bei volliger Ausbildung eines Risses liefert den Materialparameter kt,‖ zu
kt,‖ =max β0
t,‖ `c
GIf,L
, (4.153)
wobei GIf,R die Energiefreisetzungsrate und `c die charakteristische Lange bezeichnet. Der
Index I bezeichnet den Bruchmodus (Mode I) und zeigt an, dass die Kraftwirkung normal
zur Rissrichtung verlauft.
Die innere Variable αt,‖ dient ausschließlich der Beschreibung der betrachteten Festigkeit.
In Analogie zur Definition des Entfestigungsparameters αt,⊥ in Gleichung (4.143) kann ein
Page 70
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 65
Entfestigungsparameter fur Zugbeanspruchung parallel zur Faser unter Berucksichtigung von
(4.100) zu
αt,‖ = 〈ML : εp〉 = γ 〈ML : r〉 (4.154)
definiert werden. Er entspricht der plastischen, spezifischen Langenanderung in Faserrich-
tung.
Abbildung 4.12 veranschaulicht die Entwicklung von max βt,‖ fur max β0t,‖ = 65.05 N/mm2,
GIf,L = 1650 J/m2 und `c = 5 mm, in dem die innere Variable αt,‖ als Laufvariable gewahlt
wird.
0 0.02 0.04 0.06 0.08 0.10
20
40
60
80
αt, [ ]
max
βt,
(αt,
) [N
/mm
2 ]
Abbildung 4.12: Verlauf des Evolutionsgesetzes fur max βt,‖
4.2.3.4 Maximale Druckfestigkeit in Langsrichtung max βc,‖
Die maximale Druckfestigkeit in Langsrichtung wird durch
max βc,‖(αc,‖) = Y0,‖ + Y1,‖ e−kc,‖ αc,‖ + qL(αc,‖) (4.155)
beschrieben, wobei die Bedeutung der Festigkeitsanteile Y0,‖ und Y1,‖, sowie der Kompakti-
onsfestigkeit qL(αc,‖) der Abbildung 4.13 zu entnehmen ist. Mit der Beziehung max β0c,‖ =
Y0,‖ + Y1,‖ erhalt man aus (4.155)
max βc,‖(αc,‖) = max β0c,‖ − Y1,‖ (1 − e−kc,‖ αc,‖) + qL(αc,‖) . (4.156)
Die innere Variable αc,‖ dient ausschließlich der Beschreibung der betrachteten Festigkeit.
In Analogie zur Definition des Verfestigungsparameters αc,⊥ in Gleichung (4.151) kann ein
Entfestigungsparameter fur Druckbeanspruchung parallel zur Faser unter Berucksichtigung
von (4.100) zu
αc,‖ = 〈−ML : εp〉 = γ 〈−ML : r〉 (4.157)
definiert werden.
Die Modellierung der Kompaktion erfolgt mit den gleichen Argumenten, die in Unterab-
schnitt 4.2.3.2 verwendet wurden. Die Funktion qL(αc,‖) in Gleichung (4.156) lautet:
qL(αc,‖) = HL,d
〈αc,‖ − αL,d〉2αL,∞ − αc,‖
. (4.158)
Page 71
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 66
Es gilt 〈x〉 = (x + |x|)/2. HL,d ist ein Verfestigungsparameter. αL,d und αL,∞ bezeichnen
den Beginn und den Grenzfall der Kompaktion, wobei αc,‖ < αL,∞ gilt.
Da keine vollstandige Rissausbildung moglich ist, ist auch die Aufstellung der Energiebilanz
nicht mehr in der Art moglich, wie dies in den Unterabschnitten 4.2.3.1 und 4.2.3.3 geschehen
ist. Die charakteristische Lange `c und die Energiefreisetzungsrate GIfc,L sind aus Versuchen
zu bestimmen. Der Materialparameter kc,‖ ergibt sich aus folgender Beziehung:
kc,‖ =max β0
c,‖ `c
GIfc,L
. (4.159)
Abbildung 4.13 veranschaulicht die Entwicklung von max βc,‖ fur max β0c,‖ = 50.34 N/mm2,
Y1,L = 10 N/mm2, GIfc,L = 50000 J/m2 und `c = 5 mm, in dem die innere Variable αc,‖ als
Laufvariable gewahlt wird. Die volle Linie stellt die Berucksichtigung der Kompaktion fur
HL,d = 15.00 N/mm2, αL,d = 0.50 und αL,∞ = 0.75 dar. Die strichlierte Linie berucksichtigt
diese nicht.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
20
40
60
80
αc, [ ]
β c,
(αc,
)
[N/m
m2 ]
max
β0 c,‖
Y0,‖
q ‖(α
c,‖)
Y1,‖
Abbildung 4.13: Verlauf des Evolutionsgesetzes fur max βc,‖
4.2.3.5 Neigung der ersten Referenzachse der Ellipse tanφ∗
Die Neigung der ersten Referenzachse wird als
tanφ∗(αref) = (tanφ∗,0) e−kt,⊥ αref (4.160)
modelliert, wobei tanφ∗ die initiale Neigung der ersten Referenzachse bezeichnet. Der Ma-
terialparameter kt,⊥ folgt aus Gleichung (4.144).
Die innere Variable αref dient ausschließlich der Beschreibung der betrachteten Große und
wird analog zu der Variablen αt,⊥ definiert (siehe Gleichung (4.143)). Somit ergibt sich
αref = 〈MR : r〉 γ . (4.161)
Abbildung 4.14 veranschaulicht die Entwicklung von tanφ∗ fur tanφ∗,0 = -0.0069701, GIf,R
= 300 J/m2 und `c = 5 mm, in dem die innere Variable αref als Laufvariable gewahlt wird.
Page 72
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 67
0 0.02 0.04 0.06 0.08 0.1
−6
−4
−2
0x 10
−4
αref
[ ]
tan
φ* (αre
f) [ ]
Abbildung 4.14: Verlauf des Evolutionsgesetzes fur tanφ∗
4.2.3.6 Maximale Schubfestigkeit max τLR
Der ideelle Reibungswinkel φ wird durch
φ(αshr) = φ∞ + (φ0 − φ∞) e−kshr αshr (4.162)
beschrieben, wobei φ0 den initialen ideellen Reibungswinkel und φ∞ den Restreibungswinkel
bezeichnen. Analog zu den anderen Evolutionsgesetzen wird ein Materialparameter kshr und
eine primare Variable αshr eingefuhrt. Der dimensionslose Materialparameter kshr ergibt sich
aus folgender Beziehung:
kshr =max τ 0
LR `cGII
f,R
, (4.163)
wobei GIIf die Energiefreisetzungsrate und `c die charakteristische Lange bezeichnen. Der In-
dex II bezeichnet den Bruchmodus (Mode II) und zeigt an, dass die Kraftwirkung tangential
zur Rissrichtung verlauft.
Fur die einwandfreie Identifikation des dimensionslosen Entfestigungsparameters kshr sind
weitere Untersuchungen erforderlich, die nicht im Umfang dieser Arbeit enthalten sind.
Die innere Variable αshr dient ausschließlich der Beschreibung der betrachteten Festigkeit.
In Analogie zur Definition des Entfestigungsparameters αt,⊥ in Gleichung (4.143) kann ein
Entfestigungsparameter fur Schubbeanspruchung unter Berucksichtigung von (4.100) zu
αshr =√
4 trMR εp ML ε
p = γ√
4 trMR rML r (4.164)
definiert werden.
Die aktuelle maximale Schubfestigkeit wird auf der Basis des ideellen Reibungswinkels φ
beschrieben. Durch Auflosen der Gleichung (4.130) nach τLR erhalt man
max τLR =max βt,⊥ + max βc,⊥
2tanφ . (4.165)
Page 73
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 68
Durch Einsetzen von (4.142) fur max βt,⊥, (4.145) fur max βc,⊥ und (4.162) fur φ erhalt man
das Evolutionsgesetz fur die Schubfestigkeit zu
max τLR =1
2
(max β0
t,⊥ e−kt,⊥ αt,⊥ + Y0,⊥ + Y1,⊥ (1 − e−kc,⊥ αc,⊥) + qR(αc,⊥)
)·
· tan(φ∞ + (φ0 − φ∞) e−kshr αshr) . (4.166)
Diese Beziehung ist in Abbildung 4.15 dargestellt.
σR
φ0
max τLR
max τ 0
LR
τLR
maxβc,⊥ maxβ0
t,⊥
maxβt,⊥ + maxβc,⊥
maxβc,⊥
maxβt,⊥ + maxβc,⊥
2
maxβt,⊥ + maxβc,⊥
2
maxβ0
c,⊥ φ
maxβt,⊥
maxβt,⊥
Abbildung 4.15: Zusammenhang zwischen φ und der Schubfestigkeit max τLR
Abbildung 4.16 veranschaulicht die Entwicklung von max τLR fur max τ 0LR = 8.60 N/mm2,
kshr = 10 und φ∞ = 25, in dem die innere Variable αshr als Laufvariable gewahlt wird.
Die strichlierte Linie berucksichtigt ausschließlich Entfestigung der Schubfestigkeit max τLR.
Die volle Linie berucksichtigt zusatzlich Entfestigung von max βt,⊥ und Verfestigung mit
Kompaktion von max βc,⊥.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.70
2
4
6
8
10
αshr
[ ]
max
τLR
(αsh
r) [N
/mm
2 ]
Entfestigung ausschließlich für Schub
Kombinierte Ver− und Entfestigung
Abbildung 4.16: Verlauf des Evolutionsgesetzes fur max τLR
Page 74
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 69
4.2.4 Zusammenfassung der Evolutionsgesetze von charakteristi-
schen Festigkeiten und der Ver- bzw. Entfestigungsvariablen
Die verschiedenen Evolutionsgesetze fur die charakteristischen Festigkeiten max βt,⊥ (4.142),
max βc,⊥ (4.145), max βt,‖ (4.152), max βc,‖ (4.156), tanφ∗ (4.160) und max τLR (4.165) bzw.
(4.166) werden im Vektor
R∗ =
max βt,⊥
max βc,⊥
max βt,‖
max βc,‖
tanφ∗
max τLR
=
max β0t,⊥ e
−kt,⊥ αt,⊥
max β0c,⊥ + Y1,⊥ (1 − e−kc,⊥ αc,⊥) + qR(αc,⊥)
max β0t,‖ e
−kt,‖ αt,‖
max β0c,‖ − Y1,‖ (1 − e−kc,‖ αc,‖) + qL(αc,‖)
tanφ∗,0 e−kt,⊥ αref
max βt,⊥ + max βc,⊥
2 tan(φ∞ + (φ0 − φ∞) e−kshr αshr)
(4.167)
zusammengefasst, wobei max βc,⊥ = Y0,⊥ gilt.
In Unterabschnitt 4.1.2.2 wurde die Entfestigungsregel (4.18) folgendermaßen definiert:
α = s γ . (4.18)
Der vom aktuellen Spannungszustand abhangige Vektor s wird durch die Zusammenfassung
der verschiedenen Evolutionsgesetze fur die Ver- bzw. Entfestigungsvariablen αt,⊥ (4.143),
αc,⊥ (4.151), αt,‖ (4.154), αc,‖ (4.157), αref (4.161) und αshr (4.164) zu
s =
〈MR : r〉〈−MR : r〉〈ML : r〉〈−ML : r〉〈MR : r〉
√4 trMR rML r
=
〈r2〉〈−r2〉〈r1〉〈−r1〉〈r2〉2 |r3|
(4.168)
erhalten. Der Tensor r ist in Gleichung (4.100) definiert, seine Koordinaten ri mit i ∈ 1, 2, 3sind in Gleichung (4.101) festgelegt.
Tabelle 4.5 fasst die in Abschnitt 4.2.3 verwendeten Materialparameter zusammen. Sie stam-
men aus [12]. Als charakteristische Lange wurde `c = 5 mm angenommen.
Page 75
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 70
Tabelle 4.5: Zusammenstellung der verwendeten Materialparameter
Zug ⊥ max β0t,⊥ = 4.56 N/mm2 GI
f,R = 300 J/m2 kt,⊥ = 76.02
Druck ⊥ max β0c,⊥ = 4.10 N/mm2 kein GI
fc,R da Verfestigung kc,⊥ = 30.00
HR,d = 2.00 N/mm2 Y1,R = 1.80 N/mm2 αR,d
αR,∞= 0.10
0.75
Zug ‖ max β0t,‖ = 65.00 N/mm2 GI
f,L = 1650 J/m2 kt,‖ = 197.11
Druck ‖ max β0c,‖ = 50.34 N/mm2 GI
fc,L = 50000 J/m2 kc,‖ = 5.03
HL,d = 15.00 N/mm2 Y1,L = 10.00 N/mm2 αL,d
αL,∞= 0.50
0.75
Schub max τ 0LR = 8.60 N/mm2 φ∞ = 25 kshr = 10.00
4.2.5 Uberlegungen zur Festlegung der charakteristischen Lange
Im Unterabschnitt 4.1.2.2 wurde die charakteristische Lange `c eingefuhrt. Im Abschnitt
4.2.3 wurde `c verwendet, um Beziehungen zwischen den Materialparametern kt,⊥, kt,‖ , kc,‖
und kshr festzulegen. In diesem Abschnitt soll die Wahl von `c = 5 mm begrundet werden.
Bei Betrachtung des Probekorpers gemaß Abbildung 2.3 ergibt sich `c ≈ 250 mm als Ab-
stand der gegenuberliegenden Lasteinleitungsbolzen. In [12] sind obere Schranken fur die
charakteristischen Langen als
`c,critical,‖ =ELG
If,L
(β0t,‖)
2und `c,critical,⊥ =
ERGIf,R
(β0t,⊥)2
(4.169)
angegeben. Fur EL = 12000 N/mm2, GIf,L = 1650 J/m2 und β0
t,‖ = 65.00 N/mm2 erhalt
man `c,critical,‖ ≈ 4.7 mm. Fur ER = 700 N/mm2, GIf,R = 300 J/m2 und β0
t,⊥ = 4.56 N/mm2
erhalt man `c,critical,⊥ ≈ 10.1 mm. Diese Formeln ergeben sich bei Betrachtung von eindi-
mensionalen Bruchversuchen durch Nullsetzen des Nenners von
Cep =
EK
E +Kmit K = −(β0
t )2 `c
GIf
, (4.170)
wobei Cep den elasto-plastischen Tangententensor aus der infinitesimalen Theorie bei Riss-
ansatz bezeichnet. Abbildung 4.17 stellt die Gleichung (4.170) fur die Langs- und Radial-
richtung von Holz dar.
Durch die anwachsende charakteristische Lange `c wird der Entfestigungsmodul K aus
(4.170) betragsmaßig großer. Wenn |K| = E wird, tritt eine Singularitat auf. Dadurch
wird die kritische charakteristische Lange `c,critical festgelegt. Ab charakteristischen Langen
`c > `c,critical wird K positiv und somit zum Verfestigungsmodul, obwohl Entfestigung
betrachtet wird.
Fur die Versuchssimulationen ist aufgrund der Betrachtung von biaxialen Beanspruchungs-
verhaltnissen im Allgemeinen ein Wert zwischen `c,critical,‖ und `c,critical,⊥ zulassig.
Page 76
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 71
0 2 4 6 8 10 12 14 16 18 20−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1x 10
5
Ela
stop
last
isch
e T
ange
nten
neig
ung
bei R
issa
nsat
z [N
/mm
2 ]
in Faserrichtung
0 2 4 6 8 10 12 14 16 18 20−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1x 10
4
Ela
stop
last
isch
e T
ange
nten
neig
ung
bei R
issa
nsat
z [N
/mm
2 ]
quer zur Faserrichtung
(a) (b)`c,‖ [mm] `c,⊥ [mm]
`c,critical,⊥ = 10.1 mm`c,critical,‖ = 4.7 mm
Abbildung 4.17: Elasto-plastische Tangentenneigung bei Rissansatz als Funktion der cha-
rakteristischen Lange fur (a) Zug in Faserrichtung und (b) Zug quer zur
Faser
Durch Probieren wurde `c fur die im Kapitel 6 durchgefuhrten Versuchssimulationen auf
5 mm festgelegt. Dieser Wert lasst sich folgendermaßen deuten: Das makroskopische Ma-
terialmodell kann nicht fur den gesamten Probekorper angewandt werden. Das aktuelle
Kontrollvolumen des Probekorpers ist zu groß, um Entfestigungsphanomene kontrolliert zu
beobachten. Der Probekorper stellt somit im Sinne der makroskopischen Betrachtung bereits
eine Struktur dar.
Eine realistische Erfassung aller im Versuch beobachteten Phanomene erfordert eine struk-
turmechanische Untersuchung des Probekorpers, z.B. mittels der Finite Elemente Methode.
4.2.6 Aktualisierung der Parameterwerte p bei kombinierter Ver-
bzw. Entfestigung
Alle Komponenten von α werden initial zu null angenommen. Das entspricht einem un-
geschadigten Material. Durch das Erreichen des plastischen Bereiches wachsen die Kompo-
nenten von α definitionsgemaß an. Dadurch verandern sich die charakteristischen Festigkei-
ten gemaß den im Vektor R∗ aus Gleichung (4.167) angegebenen Beziehungen und damit
auch die Parameter p der Fließflache.
Page 77
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 72
Zur Bestimmung der sechs Parameter in p sind sechs Gleichungen erforderlich. Dazu verwen-
det man die Verknupfungsgleichungen zwischen den Extremwerten der Fließfunktion (4.93)
aus Unterabschnitt 4.2.1.2 und den Festigkeitsfunktionen nach Abschnitt 4.2.3. Man erhalt
ein nichtlineares algebraisches Gleichungssystem in sechs Unbekannten. Die verwendeten
Verknupfungen sind:
1. Maximale Zugfestigkeit in Radialrichtung mittels Gleichungen (4.123) und (4.142)
2. Maximale Druckfestigkeit in Radialrichtung mittels Gleichungen (4.123) und (4.145)
3. Maximale Zugfestigkeit in Langsrichtung mittels Gleichungen (4.127) und (4.152)
4. Maximale Druckfestigkeit in Langsrichtung mittels Gleichungen (4.127) und (4.156)
5. Neigung der ersten Referenzachse der Ellipse mittels Gleichungen (4.115) und (4.160)
6. Maximale Schubspannung mittels Gleichungen (4.129) und (4.166)
Abbildung 4.18 kennzeichnet die ersten funf Elemente, die durch diese Gleichungen beschrie-
ben werden. Die sechste Beziehung wurde bereits in Abbildung 4.15 illustriert.
−60 −40 −20 0 20 40 60 80−20
−10
0
10
20
σL [N/mm2]
σ R [N
/mm
2 ]
Tsai & Wu f=0erste Referenzachsezweite Referenzachse
max βt,‖ max βc,‖m
ax
βt,⊥
max
βc,⊥
φ∗
Abbildung 4.18: Elemente zur Aktualisierung der Parameterwerte p
Die sechs oben erwahnten Gleichungen werden nun im Residuumsvektor
Rβ =
12Z (−aRR bLLLL + aLL bLLRR +X
√bLLLL)
12Z (−aRR bLLLL + aLL bLLRR −X
√bLLLL)
12Z (aRR bLLRR − aLL bRRRR +X
√bRRRR)
12Z (aRR bLLRR − aLL bRRRR −X
√bRRRR)
− bLLRRbRRRR
X4√
bLRLR Z
︸ ︷︷ ︸
= Rp
−
R∗1
R∗2
R∗3
R∗4
R∗5
R∗6
︸ ︷︷ ︸
= R∗
=
0
0
0
0
0
0
(4.171)
zusammengefasst. Die Großen R∗i , i ∈ 1, ..., 6 sind die Komponenten des Vektors R∗ nach
Gleichung (4.167).
Page 78
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 73
Fur die Losung dieses nichtlinearen Gleichungssystems wird das Newton-Raphson-Itera-
tionsverfahren verwendet. Fur dieses Verfahren ist es notwendig, das Gleichungssystem in
eine Taylor-Reihe zu entwickeln. Durch Vernachlassigung von Termen hoherer als erster
Ordnung erhalt man eine lineare Naherung des Gleichungssystems als
Rβ(p) ≈ Rβ(p(k)) +∂Rp
∂p(k)
∣∣∣∣p(k)
︸ ︷︷ ︸
=: K
·∆p = Rβ(p(k)) + K · (p(k+1) − p(k)) = 0 , (4.172)
wobei (k) einen bekannten Zustand nach dem k-ten Iterationsschritt bezeichnet und (k+ 1)
den zu ermittelnden, neuen Naherungszustand. Durch Umformen von Gleichung (4.172)
erhalt man die verbesserte Losung zu
p(k+1) = p(k) − K−1 · R(k)β . (4.173)
Eine genaue Beschreibung dieses Verfahrens ist in [28] zu finden. Nach der Berechnung von
Gleichung (4.173) wird k = k + 1 gesetzt und diese Prozedur so lange wiederholt, bis die
Konvergenzbedingung ‖ Rβ ‖=√
Rβ · Rβ ≤ TOL erfullt ist. TOL ist eine vom Anwender
zu definierende Toleranz.
Abbildung 4.19 zeigt als Beispiel die Entwicklung der Form der Fließflache und der ers-
ten Referenzachse bis zur Einhaltung der vorgegebenen Toleranz von TOL = 10−12 unter
Berucksichtigung der Materialparameter aus Tabelle 4.5 von Abschnitt 4.2.4.
Ausgangszustand stellt der Parametersatz p1 aus (4.134) dar. Es werden die unbekannten
primaren Variablen mit αt,⊥ = αref = αshr = 0.05 bzw. αc,⊥ = αt,‖ = αc,‖ = 0 vorgegeben.
−60 −40 −20 0 20 40 60 80−5
−4
−3
−2
−1
0
1
2
3
4
5
σL [N/mm2]
σ R [N
/mm
2 ]
k=2
k=1
k=0
k=11
k=2k=1
k=0
k=11
Abbildung 4.19: Veranderung des Hauptschnittes des Ellipsoids wahrend der Iteration
Page 79
Theoretische Grundlagen zur Modellbildung 4.2: Bruchumhullende nach Tsai und Wu 74
In der Abbildung 4.19 ist die Ausgangssituation – modifizierter Parametersatz p1 in Glei-
chung (4.93) eingesetzt – magenta und das Endergebnis der Iteration – aktualisierter Para-
metersatz p1 in Gleichung (4.93) eingesetzt – grun markiert.
Das Newton-Raphson-Verfahren garantiert eine quadratische Rate asymptotischer Kon-
vergenz. Fur diese Vorgaben werden 11 Iterationsschritte benotigt. Die gewahlte Anderung
im demonstrierten Beispiel erfordert eine Reihe langsamer Verbesserungsschritte, ehe der Be-
reich quadratischer Konvergenz erreicht wird. Dadurch lasst sich die vergleichsweise große
Anzahl der erforderlichen Iterationsschritte erklaren.
K ist die Matrix der Ableitungen der sechs im Vektor Rp (4.171) zusammengefassten Glei-
chungen nach den sechs im Vektor p (4.92) zusammengefassten Parametern des Ellipsoids.
K stellt somit eine 6 × 6-Matrix dar.
K =∂Rp
∂p(k)=
dRp,1
daLL
dRp,1
daRR
dRp,1
dbLLLL
dRp,1
dbRRRR
dRp,1
dbLLRR
dRp,1
dbLRLR
dRp,2
daLL
dRp,2
daRR
dRp,2
dbLLLL
dRp,2
dbRRRR
dRp,2
dbLLRR
dRp,2
dbLRLR
dRp,3
daLL
dRp,3
daRR
dRp,3
dbLLLL
dRp,3
dbRRRR
dRp,3
dbLLRR
dRp,3
dbLRLR
dRp,4
daLL
dRp,4
daRR
dRp,4
dbLLLL
dRp,4
dbRRRR
dRp,4
dbLLRR
dRp,4
dbLRLR
dRp,5
daLL
dRp,5
daRR
dRp,5
dbLLLL
dRp,5
dbRRRR
dRp,5
dbLLRR
dRp,5
dbLRLR
dRp,6
daLL
dRp,6
daRR
dRp,6
dbLLLL
dRp,6
dbRRRR
dRp,6
dbLLRR
dRp,6
dbLRLR
(4.174)
Die einzelnen Koeffizientenfunktionen von Gleichung (4.174) sind im Anhang A zusammen-
gefasst. In Anhang C werden fur vier verschiedene Parametervorgaben Studien durchgefuhrt.
Page 80
Kapitel5Algorithmische Behandlung des
elasto-plastischen Materialmodells
Im folgenden Kapitel wird fur das in Unterkapitel 4.2 beschriebene Materialmodell die nu-
merische Zeitintegration durchgefuhrt.
Die Aufgabe besteht darin, das Projektionsverfahren aus Abschnitt 4.1.4 auf das Mate-
rialmodell anzuwenden und einen bekannten Zustand zum Zeitpunkt tn bei vorgegebem
totalen Verzerrungszustand ε zum Zeitpunkt tn+1 auf den vollen Zustand zum Zeitpunkt
tn+1 zu aktualisieren. Unter Zustand versteht man die Gesamtheit der Zustandsgroßen
ε, εp, σ, α, p.
Die Beschreibung des mechanischen Verhaltens von Holz erfolgt im Rahmen der Elastizitats-
theorie mit Hilfe des verallgemeinerten Hooke’schen Gesetzes aus (3.4) und im Rahmen der
Plastizitatstheorie mit Hilfe der in Unterkapitel 4.1 zusammengestellten Beziehungen sowie
der in Unterkapitel 4.2 diskutierten Fließflache (4.91) unter Berucksichtigung der Evoluti-
onsgesetze fur die charakteristischen Festigkeiten gemaß Abschnitt 4.2.3.
5.1 Zusammenstellung der numerischen Integrations-
gleichungen
In diesem Unterkapitel werden die erforderlichen Gleichungen zur numerischen Zeitintegra-
tion bzw. zur Anwendung des Projektionsverfahrens zusammengestellt.
• Hyperelastisches Materialgesetz:
Die Spannungs-Verzerrungs-Beziehung wird durch das folgende Gesetz beschrieben:
σn+1 = C : (εn+1 − εpn+1) . (5.1)
Page 81
Algorithmische Behandlung 5.1: Zusammenstellung der Integrationsgleichungen 76
Diese Beziehung entspricht der Gleichung (4.29) aus Abschnitt 4.1.3. Unter Verwen-
dung der Definition der Strukturtensoren aus (4.87) und (4.95) ergibt sich der Materi-
altensor C aus Gleichung (5.1) zu
C =EL
∆ML⊗ML +
ER
∆MR⊗MR +
νLRER
∆(ML⊗MR +MR⊗ML)+GLR M , (5.2)
wobei ∆ = 1− νLR νRL und νRL = νLRER/EL gilt. GLR ist aus (3.3) einzusetzen. EL,
ER und νLR sind die elastischen Konstanten.
• Fließbedingung bzw. -flache:
Die inkrementelle Form der Beziehung fur die Fließflache ergibt sich aus (4.91) zu:
fn+1 = an+1 : σn+1 + σn+1 : bn+1 : σn+1 − 1 = 0 , (5.3)
wobei sich die orthotropen Parametertensoren an+1 aus (4.94a) und bn+1 aus (4.94b)
ergeben. Die in den Parametertensoren vorkommenden Koeffizienten sind in
pn+1 = baLL,n+1 aRR,n+1 bLLLL,n+1 bRRRR,n+1 bLLRR,n+1 bLRLR,n+1cT , (5.4)
zusammengefasst, wobei sich der Ausgangszustand aus dem modifizierten Parameter-
satz p1 aus (4.134) ergibt.
• Kuhn-Tucker-Bedingungen und Konsistenzbedingung:
Die inkrementelle Form der Kriterien fur plastische Be- und Entlastung lauten:
γn+1 ≥ 0 , (5.5a)
fn+1 = f(σn+1,qn+1) ≤ 0 und (5.5b)
γn+1 fn+1 = 0 . (5.5c)
Diese Beziehungen entsprechen den Gleichungen (4.31a) bis (4.31c) aus Abschnitt 4.1.3.
Im plastischen Fall erhalt man mit γn+1 eine zusatzliche skalare Unbekannte. Sie
wird durch die aus der dritten Kuhn-Tucker-Bedingung (5.5c) folgenden Konsistenz-
bedingung fn+1 = 0 bestimmt.
• Assoziierte Fließregel:
Die inkrementelle Form der assoziierten Fließregel ergibt sich aus Gleichung (4.99) aus
Abschnitt 4.2.1.3 zu
εpn+1 = ε
pn + γn+1 rn+1 , (5.6)
wobei sich rn+1 aus (4.100) wie folgt ergibt
rn+1 = an+1 + 2bn+1 : σn+1 . (5.7)
• Nicht-assoziierte Ver- bzw. Entfestigungsregel:
Die inkrementelle Form der nicht-assoziierten Ver- bzw. Entfestigungsregel ergibt sich
aus Gleichung (4.18) aus Abschnitt 4.2.4 zu
αn+1 = αn + γn+1 sn+1 , (5.8)
wobei sn+1 gemaß (4.168) einzusetzen ist.
Page 82
Algorithmische Behandlung 5.2: Formulierung des Newton-Raphson-Verfahrens 77
• Evolutionsgesetze der charakteristischen Festigkeiten der Fließflache :
Die Evolutionsgesetze wurden in Abschnitt 4.2.4 im Vektor
R∗n+1 = R∗(αn+1) (5.9)
zusammengefasst (siehe Gleichung (4.167)).
• Aktualisierung der Parameterwerte pn+1 :
In Abschnitt 4.2.6 wird der Residuumsvektor
Rβ,n+1 = Rp(pn+1) − R∗n+1 (5.10)
aufgestellt (siehe Gleichung (4.171)).
5.2 Formulierung des Newton-Raphson-Verfahrens
Die erforderlichen Beziehungen zur Losung der Aufgabe werden in den Gleichungen (5.11a)
bis (5.11f) zusammengefasst. Die Gleichungen werden dabei bereits in der Form Rj = 0
angeschrieben. Sie enthalten weiters Querverweise zu jenen Beziehungen aus Unterkapitel
5.1, in denen die entsprechenden Gleichungen beschrieben wurden.
(5.1) → Rσ = C−1 : σn+1 − (εn+1 − ε
pn+1) = 0 (5.11a)
(5.6) → Rε = εpn+1 − ε
pn − γn+1 rn+1 = 0 (5.11b)
(5.7) → Rr = rn+1 − an+1 − 2bn+1 : σn+1 = 0 (5.11c)
(5.8) → Rα = αn+1 − αn − γn+1 sn+1 = 0 (5.11d)
(5.10) → Rβ = Rp,n+1(pn+1) − R∗(αn+1) = 0 (5.11e)
(5.3) → fn+1 = an+1 : σn+1 + σn+1 : bn+1 : σn+1 − 1 = 0 (5.11f)
Nun werden diese Gleichungen in eine Taylor-Reihe entwickelt und alle Terme hoherer als
erster Ordnung vernachlassigt. Dies fuhrt zur linearisierten Form der Gleichungen (5.11a)
bis (5.11f) als
Rj(qn+1 + ∆qn+1) ≈ Rj(qn+1) +DRj · ∆qn+1 = 0 , (5.12)
wobei j ∈ σ, ε, r, α, β, f und
qn+1 = bσn+1 εpn+1 rn+1 αn+1 pn+1 γn+1cT (5.13)
den Vektor der unbekannten Großen bzw. ∆qn+1 dessen Zuwachs darstellen. DRj ist der
zugehorige Tangentenoperator, der die Ableitungen von Rj(qn+1) nach den Elementen von
qn+1 enthalt. Das Projektionsverfahren ist durch εn+1 = konst. und somit durch ∆εn+1 =
εn+1 − εn = konst. gekennzeichnet.
Page 83
Algorithmische Behandlung 5.2: Formulierung des Newton-Raphson-Verfahrens 78
Das Newton-Raphson-Verfahren zur Losung von Rj,n+1 = 0 lautet
Rn+1 ≈ R(k)n+1 +DR
(k)n+1 · ∆qn+1 = 0 , (5.14)
wobei der Residuumsvektor als
Rn+1 = bRσ Rε Rr Rα Rβ RfcT (5.15)
definiert ist. (k) bezeichnet einen bekannten Zustand nach dem k-ten Iterationsschritt.
DR(k)n+1 ist der zugehorige bekannte Tangentenoperator. Die Losung von Gleichung (5.14)
liefert
∆qn+1 = −(
DR(k)n+1
)−1
· R(k)n+1 . (5.16)
Sie fuhrt zur verbesserten Losung (k + 1) als
qn+1 = qn + ∆qn+1 und R(k+1)n+1 = Rn+1(q
(k+1)n+1 ) . (5.17)
Diese Prozedur ist solange zu wiederholen, bis
‖ R(k+1)n+1 ‖ ≤ TOL . (5.18)
Sobald die Losung mit ausreichender Genauigkeit (TOL = 10−12) ermittelt wurde, ist der
Zustand zum Zeitpunkt tn+1 hinreichend genau bekannt.
Gleichung (5.14) ausfuhrlich angeschrieben, gibt Aufschluss uber die Große des Gleichungs-
systems:
Rσ
Rε
Rr
Rα
Rβ
Rf
+
X I(3) 0 0 0 0
0 I(3) X 0 0 X
X 0 I(3) 0 X 0
0 0 X I(6) 0 X
0 0 0 X X 0
X 0 0 0 X 0
·
∆σ(3)
∆εp(3)
∆r(3)
∆α(6)
∆p(6)
∆γ(1)
=
0
0
0
0
0
0
. (5.19)
Die in den runden Klammern angegebenen Zahlen geben die jeweilige Anzahl der Eintrage
des jeweiligen aquivalenten Vektors an. qn+1 enthalt somit 22 unbekannte Großen.
Im Tangentenoperator, darstellbar durch eine 22 × 22-Matrix, sind insgesamt 268 von 484
Eintragen identisch null. Die Symbole X und I(n) markieren jene Bereiche der Matrix die
ungleich null sind, wobei I(n) die n×n-Einheitsmatrix bezeichnet. Aufgrund der vielen Null-
Eintrage empfiehlt sich eine Zerlegung des Tangentenoperators, um den Rechenaufwand fur
die Inversion von DR(k)n+1 in (5.16) zu reduzieren.
Page 84
Algorithmische Behandlung 5.3: Zerlegung des Tangentenoperators 79
5.3 Zerlegung des Tangentenoperators DR(k)n+1 in DRj
Im folgenden Unterkapitel wird der Tangentenoperator DR(k)n+1 zeilenweise in DRj fur j ∈
σ, ε, r, α, β, f zerlegt. Durch die Multiplikation der einzelnen DRj mit dem Vektor qn+1
fallen die Null-Eintrage aus der Berechnung und werden im Folgenden zu einer effizienten
Losung von (5.16) fuhren. Die Zerlegung erfolgt als:
1. Gleichungen fur j = σ:
Die erste Zeile von (5.19) lautet
R(k)σ +DRσ · ∆qn+1 = 0 . (5.20)
Die Teilmatrix DRσ erhalt man zu
DRσ =[
C−1
I(3) 0 0 0 0]. (5.21)
Durch Einsetzen von (5.21) in (5.20) und Umformen erhalt man den Zuwachs der
Spannungen zu
∆σn+1 = −C : ∆εpn+1 − C : R(k)
σ . (5.22)
2. Gleichungen fur j = ε:
Die zweite Zeile von (5.19) lautet
R(k)ε +DRε · ∆qn+1 = 0 . (5.23)
Die Teilmatrix DRε erhalt man zu
DRε =[
0 I(3) − γ(k)n+1 I(3) 0 0 − r
(k)n+1
]
. (5.24)
Durch Einsetzen von (5.24) in (5.23) und Umformen erhalt man den Zuwachs der
plastischen Verzerrungen zu
∆εpn+1 = r
(k)n+1 ∆γn+1 + γ
(k)n+1 ∆rn+1 − R(k)
ε . (5.25)
Page 85
Algorithmische Behandlung 5.3: Zerlegung des Tangentenoperators 80
3. Gleichungen fur j = r:
Die dritte Zeile von (5.19) lautet
R(k)r +DRr · ∆qn+1 = 0 . (5.26)
Die Teilmatrix DRr erhalt man zu
DRr =
[
−2b(k)n+1 0 I(3) 0
∂R(k)r
∂p(k)n+1
0
]
(5.27)
mit der aus (4.100) und (4.134) folgenden Beziehung
∂R(k)r
∂p(k)n+1
=
−1 0 −2 σ(k)L,n+1 0 −2 σ
(k)R,n+1 0
0 −1 0 −2 σ(k)R,n+1 −2 σ
(k)L,n+1 0
0 0 0 0 0 −8 τ(k)LR,n+1
, (5.28)
wobei σ(k)L,n+1, σ
(k)R,n+1 und τ
(k)LR,n+1 die Komponenten von σ
(k)n+1 bezeichnen. In (5.27) ist
b(k)n+1 durch (4.96) als lineare Funktion von p
(k)n+1 und den Strukturtensoren definiert.
(5.28) gilt ausschließlich fur das Materialhauptsystem.
Durch Einsetzen von (5.27) in (5.26) und Umformen erhalt man den Zuwachs von
∆rn+1 zu
∆rn+1 = 2b(k)n+1 : ∆σn+1 −
∂R(k)r
∂p(k)n+1
· ∆pn+1 − R(k)r . (5.29)
4. Gleichungen fur j = α:
Die vierte Zeile von (5.19) lautet
R(k)α +DRα · ∆qn+1 = 0 . (5.30)
Die Teilmatrix DRα erhalt man zu
DRα =
[
0 0 − γn+1∂s
(k)n+1
∂r(k)n+1
I(6) 0 − s(k)n+1
]
(5.31)
mit
∂s(k)n+1
∂r(k)n+1
=
0 12 +
sign r22 0
0 −12 +
sign r22 0
12 +
sign r22 0 0
−12 +
sign r22 0 0
0 12 +
sign r22 0
0 0 2 sign r3
. (5.32)
Durch Einsetzen von (5.31) in (5.30) und Umformen erhalt man den Zuwachs von
∆αn+1 zu
∆αn+1 = γn+1
∂s(k)n+1
∂r(k)n+1
: ∆rn+1 + s(k)n+1 ∆γn+1 − R(k)
α . (5.33)
Page 86
Algorithmische Behandlung 5.3: Zerlegung des Tangentenoperators 81
5. Gleichungen fur j = β:
Die funfte Zeile von (5.19) lautet
R(k)β +DRβ · ∆qn+1 = 0 . (5.34)
Die Teilmatrix DRβ erhalt man zu
DRβ =
[
0 0 0 − ∂R∗(k)n+1
∂α(k)n+1
∂R(k)p,n+1
∂p(k)n+1
0
]
. (5.35)
Der in (5.35) vorkommende Ausdruck ∂R(k)p,n+1/p
(k)n+1 entspricht der Matrix K
(k)n+1 =
K|(k) aus (4.174). Der Ausdruck ∂R∗(k)n+1/α
(k)n+1 wird im Folgenden als Matrix L
(k)n+1
bezeichnet. Im Anhang B wird L(k)n+1 detailliert dargestellt.
Durch Einsetzen von (5.35) in (5.34) und Umformen erhalt man den Zuwachs von pn+1
zu
∆pn+1 = K(k)−1n+1 ·
(
L(k)n+1 · ∆αn+1 − R
(k)β
)
. (5.36)
6. Konsistenzbedingung (j = f):
Die sechste und letzte Zeile von (5.19) lautet
f(k)n+1 +DRf · ∆qn+1 = 0 . (5.37)
Die Teilmatrix DRf aus Gleichung (5.37) erhalt man zu
DRf =
[
∂f(k)n+1
∂σ(k)n+1
0 0 0∂f
(k)n+1
∂p(k)n+1
0
]
(5.38)
mit∂f
(k)n+1
∂σ(k)n+1
= a(k)n+1 + 2b
(k)n+1 : σ
(k)n+1 (5.39)
und unter Berucksichtigung von (4.93) fur das Materialhauptsystem
∂f(k)n+1
∂p(k)n+1
=[
σ(k)L,n+1 σ
(k)R,n+1 σ
(k)2L,n+1 σ
(k)2R,n+1 2 σ
(k)L,n+1 σ
(k)R,n+1 4 τ
(k)2LR,n+1
]
. (5.40)
Der Ausdruck ∂f(k)n+1/∂σ
(k)n+1 stimmt erst im konvergierten Ergebnis mit r
(k)n+1 uberein.
Im Zuge der Iteration ist dieser Ausdruck nicht durch r(k)n+1 zu ersetzen.
Durch Einsetzen von (5.38) in (5.37) erhalt man die linearisierte Form der Konsistenz-
bedingung zu
f(k)n+1 +
∂f(k)n+1
∂σ(k)n+1
: ∆σn+1 +∂f
(k)n+1
∂p(k)n+1
· ∆pn+1 = 0 . (5.41)
Page 87
Algorithmische Behandlung 5.4: Berechnung des Zuwachses ∆qn+1 82
5.4 Berechnung des Zuwachses ∆qn+1
Ziel dieses Unterkapitels ist es, eine Beziehung fur den Zuwachs ∆γn+1 des inkrementellen
Konsistenzparameters zu erhalten, die ausschließlich von bekannten Großen des jeweiligen
Iterationsschritts abhangt. Damit sollen in der Folge alle in ∆qn+1 enthaltenen Zuwachse
berechnet werden. Die Vorgangsweise wird in der Folge schrittweise erlautert.
Ausgangszustand stellen die in Unterkapitel 5.3 hergeleiteten Beziehungen fur alle in ∆qn+1
enthaltenen Zuwachse dar. Diese Beziehungen lauten:
∆σn+1 = −C : ∆εpn+1 − C : R(k)
σ (5.42a)
∆εpn+1 = r
(k)n+1 ∆γn+1 + γ
(k)n+1 ∆rn+1 − R(k)
ε (5.42b)
∆rn+1 = 2b(k)n+1 : ∆σn+1 −
∂R(k)r
∂p(k)n+1
· ∆pn+1 − R(k)r (5.42c)
∆αn+1 = γn+1
∂s(k)n+1
∂r(k)n+1
: ∆rn+1 + s(k)n+1 ∆γn+1 − R(k)
α (5.42d)
∆pn+1 = K(k)−1n+1 ·
(
L(k)n+1 · ∆αn+1 − R
(k)β
)
(5.42e)
f(k)n+1 +
∂f(k)n+1
∂σ(k)n+1
: ∆σn+1 +∂f
(k)n+1
∂p(k)n+1
· ∆pn+1 = 0 . (5.42f)
1. Elimination von ∆pn+1:
Der Zuwachs ∆pn+1 gemaß (5.42e) wird in die Beziehungen (5.42c) und (5.42f) einge-
setzt. Dadurch erhalt man fur (5.42c)
∆rn+1 = 2b(k)n+1 : ∆σn+1 −
∂R(k)r
∂pn+1· K(k)−1
n+1 · L(k)n+1 · ∆αn+1 − R∗(k)
r (5.43)
mit
R∗(k)r = R(k)
r − ∂R(k)r
∂p(k)n+1
· K(k)−1n+1 ·R(k)
β (5.44)
und fur (5.42f)
R∗(k)f +
∂f(k)n+1
∂σ(k)n+1
: ∆σn+1 +∂f
(k)n+1
∂p(k)n+1
· K(k)−1n+1 · L(k)
n+1 · ∆αn+1 = 0 (5.45)
mit
R∗(k)f = f
(k)n+1 −
∂f(k)n+1
∂p(k)n+1
· K(k)−1n+1 ·R(k)
β . (5.46)
Page 88
Algorithmische Behandlung 5.4: Berechnung des Zuwachses ∆qn+1 83
2. Elimination von ∆εpn+1:
Der Zuwachs ∆εpn+1 gemaß (5.42b) wird in die Beziehung (5.42a) eingesetzt. Dadurch
erhalt man
∆σn+1 = −C : r(k)n+1 ∆γn+1 − γ
(k)n+1 C : ∆rn+1 − R∗(k)
σ (5.47)
mit
R∗σ = C : (R(k)
σ − R(k)ε ) . (5.48)
3. Elimination von ∆σn+1:
Der Zuwachs ∆σn+1 gemaß (5.47) wird in die Beziehungen (5.43) und (5.45) eingesetzt.
Dadurch erhalt man fur (5.43)
∆rn+1 = −2b(k)n+1 : C : r
(k)n+1 ∆γn+1 − 2 γ
(k)n+1 b
(k)n+1 : C : ∆rn+1 −
− ∂R(k)r
∂p(k)n+1
· K(k)−1n+1 · L(k)
n+1 · ∆αn+1 − R∗∗(k)r (5.49)
mit
R∗∗(k)r = R∗(k)
r + 2b(k)n+1 : R∗(k)
σ (5.50)
und die aktuelle Form der linearisierten Konsistenzbedingung zu
R∗∗(k)f − ∂f
(k)n+1
∂σ(k)n+1
: C : r(k)n+1∆γ
(k)n+1 − γ
(k)n+1
∂f(k)n+1
∂σ(k)n+1
: C : ∆rn+1 +
+∂f
(k)n+1
∂p(k)n+1
·K(k)−1n+1 · L(k)
n+1 · ∆αn+1 = 0 (5.51)
mit
R∗∗(k)f = R
∗(k)f − ∂f
(k)n+1
∂σ(k)n+1
: R∗(k)σ . (5.52)
4. Elimination von ∆αn+1:
Der Zuwachs ∆αn+1 gemaß (5.42d) wird in die Beziehung (5.49) eingesetzt. Dadurch
erhalt man
∆rn+1 = Π(k)n+1 :
(
Ω(k)n+1 ∆γn+1 − R∗∗∗(k)
r
)
(5.53)
mit
R∗∗∗r = R∗∗(k)
r − ∂R(k)r
∂p(k)n+1
· K−1(k)n+1 · L(k)
n+1 · R(k)α , (5.54)
Πn+1 =
[
I(3) + 2 γ(k)n+1 b
(k)n+1 : C + γ
(k)n+1
∂R(k)r
∂p(k)n+1
· K−1(k)n+1 · L(k)
n+1 :∂s
(k)n+1
∂r(k)n+1
]−1
(5.55)
und
Ωn+1 = −2b(k)n+1 : C : r
(k)n+1 −
∂R(k)r
∂p(k)n+1
· K−1(k)n+1 · L(k)
n+1 · s(k)n+1 . (5.56)
Page 89
Algorithmische Behandlung 5.4: Berechnung des Zuwachses ∆qn+1 84
5. Berechnung des Zuwachses ∆γn+1 des Konsistenzparameters:
In die aktuelle Form der linearisierten Konsistenzbedingung (5.51) werden die Zuwachse
∆rn+1 gemaß (5.53) und ∆αn+1 gemaß (5.42d) eingesetzt. Durch Auflosen der daraus
erhaltenen Beziehung nach ∆γn+1 erhalt man die gesuchte Beziehung fur den Zuwachs
∆γn+1 zu
∆γn+1 =A
(k)n+1
B(k)n+1
(5.57)
mit
A(k)n+1 = R
∗∗(k)f + γ
(k)n+1
∂f(k)n+1
∂p(k)n+1
: C : Π(k)n+1 : R∗∗∗(k)
r − ∂f(k)n+1
∂σ(k)n+1
· K−1(k)n+1 · L(k)
n+1 · R(k)α −
− γ(k)n+1
∂f(k)n+1
∂p(k)n+1
· K−1(k)n+1 · L(k)
n+1 :∂s
(k)n+1
∂r(k)n+1
: Π(k)n+1 : R∗∗∗(k)
r (5.58)
und
B(k)n+1 =
∂f(k)n+1
∂σ(k)n+1
: C : r(k)n+1 + γ
(k)n+1
∂f(k)n+1
∂σ(k)n+1
: C · Π(k)n+1 : Ω
(k)n+1 −
− γ(k)n+1
∂f(k)n+1
∂p(k)n+1
· K(k)−1n+1 · L(k)
n+1 :∂s
(k)n+1
∂r(k)n+1
: Π(k)n+1 · Ω
(k)n+1 −
− ∂f(k)n+1
∂p(k)n+1
· K(k)−1n+1 · L(k)
n+1 · s(k)n+1 . (5.59)
Die restlichen Zuwachse werden durch schrittweises Ruckeinsetzen in die Gleichungen (5.53)
→ ∆rn+1, (5.33) → ∆αn+1, (5.25) → ∆εpn+1, (5.22) → ∆σn+1 und (5.36) → ∆pn+1
erhalten. Damit ist auch der Zuwachs
∆qn+1 = −(
DR(k)n+1
)−1
· R(k)n+1 (5.60)
ermittelt. ∆qn+1 fuhrt zur verbesserten Losung (k + 1) als
qn+1 = qn + ∆qn+1 und R(k+1)n+1 = Rn+1(q
(k+1)n+1 ) . (5.61)
Diese Prozedur ist solange zu wiederholen, bis
‖ R(k+1)n+1 ‖ ≤ TOL . (5.62)
Sobald die Losung mit ausreichender Genauigkeit (TOL = 10−12) ermittelt wurde, ist der
Zustand zum Zeitpunkt tn+1 hinreichend genau bekannt.
Das Newton-Raphson-Verfahren gewahrleistet eine asymptotisch quadratische Konver-
genzrate zur Losung der beschriebenen Aufgabe. Tabelle 5.1 zeigt unter Berucksichtigung
der Materialparameter aus Tabelle 4.5 von Abschnitt 4.2.4 fur ein Verzerrungsinkrement
εn+1 − εn = b0.004 0.004 − 0.008cT wie der Fehler im Zuge der Iteration abnimmt.
Page 90
Algorithmische Behandlung 5.5: Konsistente algorithmische Tangente Cepn+1 85
Tabelle 5.1: Beispiel zur Illustration der quadratischen Konvergenzrate des Iterationsverfah-
rens fur die verwendete Fassung des Projektionsverfahrens
0 1 2 3 4 510
−15
10−10
10−5
100
105
Iterationsschritt k [ ]
Rel
ativ
er F
ehle
r [ ]
Iterationsschritt k norm R(k)
norm R(0)
0 1.0 · 100
1 1.3 · 10+1
2 5.0 · 10−2
3 1.4 · 10−4
4 4.0 · 10−8
5 2.5 · 10−15
5.5 Berechnung der konsistenten algorithmischen Tan-
gente Cepn+1
Nach erfolgter Projektion zum Zeitpunkt tn+1 bzw. der Konvergenz des Newton-Raphson-
Verfahrens sind alle Zustandsgroßen bekannt. Um eine effiziente numerische Implementie-
rung fur die Finite Elemente Methode zu erhalten, benotigt man die konsistente Linearisie-
rung des beschriebenen Integrationsalgorithmus. Bei Beschrankung auf physikalische Nicht-
linearitat stellen die konstitutiven Gleichungen die einzige Ursache nichtlinearen Verhaltens
dar. Daher mussen nur die konstitutiven Beziehungen linearisiert werden.
Fur die Anwendung des Projektionsverfahrens wurde εn+1 = konst. gehalten und es folgte
dεn+1 = 0. Die konsistente Tangente Cepn+1 ist mittels der differentiellen Beziehung
dσn+1 =dσn+1
dεn+1: dεn+1 = C
epn+1 : dεn+1 (5.63)
definiert. Zur Berechnung von Cepn+1 muss man das Differential der Funktion σn+1(εn+1)
bilden. Diese Funktion entspricht dem Ergebnis des Projektionsverfahrens fur einen vor-
gegebenen Verzerrungszustand εn+1. Cepn+1 beschreibt somit die Anderung des Ergebnisses
σn+1 des Projektionsverfahrens zufolge einer Anderung des Eingangsparameters εn+1.
Die linearisierte Gleichung (5.12) andert sich dadurch zu
Rj +DRj| n+1=konst. · ∆qn+1 +DRj|qn+1=konst. : ∆εn+1 = 0 , (5.64)
wobei j ∈ σ, ε, r, α, β, f gilt. Da der konvergierte Zustand zum Zeitpunkt tn+1 betrachtet
wird, ist Rj = 0. Der Tangentenoperator DRj| n+1=konst. ist ident dem Tangentenoperator
DRn+1 aus (5.14) fur den konvergierten Zustand. Aufgrund dieser Aquivalenz und der
Analogie zwischen (5.14) und (5.64) folgt
∆qn+1 ⇔ dqn+1 , (5.65a)
R(k)n+1 ⇔ DRn+1|qn+1=konst. : dεn+1 . (5.65b)
Page 91
Algorithmische Behandlung 5.5: Konsistente algorithmische Tangente Cepn+1 86
Fur die Losung von (5.64) wird daher die gleiche Vorgehensweise wie in Unterkapitel 5.2
gewahlt. Die Anwendung der Analogie (5.65b) auf die Gleichungen (5.11a) bis (5.11f) fuhrt
auf
Rσ ⇔ DRσ|qn+1=konst. : dεn+1 = −dεn+1 , (5.66a)
Rj ⇔ DRj|qn+1=konst. : dεn+1 = 0 ∀ j 6= σ . (5.66b)
Durch Anwendung der Analogie (5.66a) auf die Residuen R∗σ (5.48), R∗∗
f (5.52), R∗∗∗r (5.54)
und An+1 (5.58) erhalt man
R∗σ → −C : dεn+1 , (5.67a)
R∗∗f → +
∂fn+1
∂σn+1: C : dεn+1 , (5.67b)
R∗∗r → −2bn+1 : C : dεn+1 , (5.67c)
R∗∗∗r → −2bn+1 : C : dεn+1 und (5.67d)
An+1 → −2 γn+1∂fn+1
∂σn+1
: C : Πn+1 : bn+1 : C : dεn+1 +∂fn+1
∂σn+1
: C : dεn+1 +
+ 2 γn+1∂fn+1
∂pn+1
· K−1n+1 · Ln+1 :
∂sn+1
∂rn+1
: Πn+1 : bn+1 : C : dεn+1 . (5.67e)
Alle anderen Residuen ergeben sich zu null. Um eine Beziehung fur die konsistente algorith-
mische Tangente zu erhalten, setzt man (5.6) in (5.1) ein. Dies liefert
σn+1 = C : (εn+1 − εpn − γn+1 rn+1) . (5.68)
Das Differential von (5.68) lautet somit
dσn+1 = C : dεn+1 − γn+1 C : drn+1 − C : rn+1 dγn+1 . (5.69)
Aus (5.57) und der gezeigten Analogie folgt
dγn+1 =An+1
Bn+1: dεn+1 (5.70)
mit
An+1 = − 2 γn+1∂fn+1
∂σn+1: C : Πn+1 : bn+1 : C +
∂fn+1
∂σn+1: C +
+ 2 γn+1∂fn+1
∂pn+1· K−1
n+1 · Ln+1 :∂sn+1
∂rn+1: Πn+1 : bn+1 : C (5.71)
und Bn+1 aus (5.59). Einsetzen von (5.70) und (5.67d) in (5.53) liefert unter Beachtung der
Analogiebeziehung (5.65a)
drn+1 =
(
2Πn+1 : bn+1 : C +Πn+1 : Ωn+1 ⊗ An+1
Bn+1
)
: dεn+1 . (5.72)
Page 92
Algorithmische Behandlung 5.5: Konsistente algorithmische Tangente Cepn+1 87
Schließlich erhalt man durch Einsetzen von (5.70) und (5.72) in (5.69)
dσn+1 = C : dεn+1 − 2 γn+1 C ·Πn+1 : bn+1 : C : dεn+1 −
− γn+1 C : Πn+1 : Ωn+1 ⊗ An+1 + C : rn+1 ⊗ An+1
Bn+1: dεn+1 . (5.73)
Der Vergleich mit der Definitionsgleichung (5.63) liefert die gesuchte Beziehung fur die kon-
sistente Tangente zu
Cepn+1 = C − 2 γn+1 C : Πn+1 : bn+1 : C − γn+1 C : Πn+1 : Ωn+1 ⊗ An+1 + C : rn+1 ⊗ An+1
Bn+1
.
(5.74)
Abbildung 5.1 zeigt die geometrische Interpretation der konsistenten Tangente bei Betrach-
tung einer infinitesimal benachbarten Fließflache.
Return Map
ReturnM
ap
fn+1 = 0
fn+1 + dfn+1 = 0
fn = 0
σn
dσn+1 = Cepn+1 : dεn+1
σtrialn+1 + dσ
trialn+1 = C : (εn+1 + dεn+1 − ε
pn)
σtrialn+1 = C : (εn+1 − ε
pn)
σn+1 + dσn+1
σn+1 = C : (εn+1 − εpn+1)
Abbildung 5.1: Geometrische Interpretation der konsistenten Tangente
Page 93
Kapitel6Versuchssimulation mit dem
Materialmodell
Mit dem in Unterkapitel 4.2 entwickelten Materialmodell und dem in Kapitel 5 dargestellten
Integrationsalgorithmus ist es moglich, bei beliebiger Vorgabe eines Verzerrungspfades unter
Berucksichtigung der elastischen und plastischen Eigenschaften von Holz die entsprechenden
Spannungen zu berechnen. Darauf aufbauend werden in diesem Kapitel drei Moglichkeiten
der Versuchssimulation prasentiert, diskutiert und gegenubergestellt.
Die folgenden Versuchsruckrechnungen basieren auf dem modifizierten Parametersatz p1
nach (4.134) fur die initiale Fließflache und den Material-, Verfestigungs- und Entfestigungs-
parametern gemaß Tabelle 6.1. Die elastischen Konstanten werden ebenfalls in Tabelle 6.1
angegeben. Aufgrund der festgestellten Probleme in Kapitel 3 werden diese Materialpara-
meter erforderlichenfalls an den individuellen Einzelversuch angepasst. Als charakteristische
Lange wurde `c = 5 mm angenommen.
Tabelle 6.1: Materialparameter fur die Versuchssimulationen
Elastisch EL = 12000 N/mm2 ER = 700 N/mm2 νLR = 0.50
Zug ⊥ max β0t,⊥ = 4.56 N/mm2 GI
f,R = 300 J/m2 kt,⊥ = 76.02
Druck ⊥ max β0c,⊥ = 4.10 N/mm2 kein GI
fc,R da Verfestigung kc,⊥ = 30.00
HR,d = 2.00 N/mm2 Y1,R = 1.80 N/mm2 αR,d
αR,∞= 0.10
0.75
Zug ‖ max β0t,‖ = 65.00 N/mm2 GI
f,L = 1650 J/m2 kt,‖ = 197.11
Druck ‖ max β0c,‖ = 50.34 N/mm2 GI
fc,L = 50000 J/m2 kc,‖ = 5.03
HL,d = 15.00 N/mm2 Y1,L = 10.00 N/mm2 αL,d
αL,∞= 0.50
0.75
Schub max τ 0LR = 8.60 N/mm2 φ∞ = 25 kshr = 10.00
Page 94
Versuchssimulation mit dem Materialmodell 6.1: Direkte Versuchssimulation 89
6.1 Direkte Versuchssimulation
Bei der direkten Versuchssimulation werden jene Verzerrungszustande zur Berechnung her-
angezogen, die aus der Versuchsdurchfuhrung resultieren (siehe Abschnitt 2.2). Fur die Dar-
stellung der Spannungs-Verzerrungs-Beziehungen gemaß [5] wurde jeweils die betragsmaßig
großere Spannung herangezogen. Unter Berucksichtigung dieser Spannung wurden der in-
itiale Verzerrungszustand ermittelt und die entsprechenden Spannungs-Verzerrungs-Kurven
parallelverschoben und um einen Lastschritt erganzt. Dazu ist die in Abschnitt 2.5.1 be-
schriebene Berucksichtigung des initialen Verzerrungszustandes zu verwenden.
Im Folgenden wird auch die betragsmaßig kleinere Spannung dokumentiert. Man erhalt da-
her zwei ideelle oder idealisierte Spannungs-Verzerrungs-Kurven fur jede Komponente des
Verzerrungszustandes. Die in Abschnitt 2.5.1 durchgefuhrte Verschiebung der Linien ist
somit auch unter Zugrundelegung der betragsmaßig kleineren Spannungskomponente durch-
zufuhren. Nur dann ist ein Vergleich zwischen Versuch und Simulation sinnvoll moglich.
Man erhalt dadurch zwei ahnliche Verzerrungspfade pro Versuch, die sich um eine Diffe-
renzverzerrung ∆ε unterscheiden. Tragt man sowohl die betragsmaßig großere als auch
die betragsmaßig kleinere Hauptspannung auf der Ordinate bzw. die drei Komponenten
εL, εR und γLR des Verzerrungstensors auf der Abzisse auf, so erhalt man insgesamt sechs
Spannungs-Verzerrungs-Kurven.
Auf eine Darstellung der Schubspannung τLR wird verzichtet, da samtliche in diesem Unter-
kapitel dargestellten Versuche, Versuche mit einem Faserwinkel von ϕ = 0 darstellen. Bei
ϕ = 0 ist die Schubspannung τ12 = τLR definitionsgemaß null.
Zusatzlich zu den Spannungs-Verzerrungs-Linien werden auch die Verlaufe der Spannungen
σR uber σL analog zu der in [5] gewahlten Form dargestellt. Dabei ist anzumerken, dass
diese zwei Spannungskomponenten aus unterschiedlichen Verzerrungszustanden resultieren,
die sich jeweils um eine Differenzverzerrung ∆ε unterscheiden. Diese Differenzverzerrungen
entstehen aus der Berucksichtigung des initialen Verzerrungszustandes fur die betragsmaßig
großere als auch kleinere Spannung.
Letztendlich wird jene Fließflache im orthotropen Spannungsraum dargestellt, die sich auf-
grund jenes Verzerrungspfades ergibt, der den initialen Verzerrungszustand zufolge der be-
tragsmaßig großeren Spannung berucksichtigt.
In den folgenden Abschnitten wird die direkte Versuchssimulation fur jene Versuche durch-
gefuhrt, die zur Veranschaulichung der vier Versagensmechanismen nach Abschnitt 2.5.2
herangezogen wurden. Es sind dies die Versuche mit den Versuchsnummern 090, 248, 144
und 222 gemaß [5].
Die ausgezogenen Linien entsprechen jeweils den Simulationsergebnissen. Die strichlierten
Linien zeigen die Ergebnisse aus dem Versuch. Zusatzlich werden zu jedem Versuch jene
Materialparameter angegeben, die im Zuge der Simulation verandert wurden.
Page 95
Versuchssimulation mit dem Materialmodell 6.1: Direkte Versuchssimulation 90
6.1.1 Zugversagen quer zur Faserrichtung
Abbildung 6.1: Direkte Versuchssimulation von Versuch Nr. 090 mit κ = 0:+1/ϕ = 0
Fur die in Abbildung 6.1 dargestellte Simulation war es erforderlich die Materialparameter
ER = 500 N/mm2 und νLR = 0.80 gegenuber den initialen Werten von Tabelle 6.1 zu setzen.
Das Spannungs-Verzerrungs-Diagramm, das die betragsmaßig großere Spannung σR darstellt,
zeigt die im Versuch beobachtete Entfestigung. Bei einer Spannung von σR ≈ 4.5 N/mm2
wird ein Riss initiiert. Danach erkennt man schon deutlich die Entfestigung.
Das Spannungs-Verzerrungs-Diagramm, das die betragsmaßig kleinere Spannung σL dar-
stellt, zeigt folgendes Problem: Die Berucksichtigung des initialen Verzerrungszustandes
liefert eine falsche Verschiebung der Linien. Da der linear elastische Bereich beim Versuch
nicht beim Versuchsstart beginnt, wurden wahrend des Vorspannzustandes die Fertigungsto-
leranzen zwischen Probekorper und Belastungseinrichtung durch die gewahlte Vorspannung
nicht vollstandig beseitigt.
Die Wahl der hohen Querdehnzahl ist erforderlich, da sonst kein Vergleich der Spannungs-
Verzerrungs-Diagramme mit der betragsmaßig kleineren Spannung σL moglich ist.
Page 96
Versuchssimulation mit dem Materialmodell 6.1: Direkte Versuchssimulation 91
6.1.2 Duktiles Verhalten unter Druck quer zur Faserrichtung
Abbildung 6.2: Direkte Versuchssimulation von Versuch Nr. 248 mit κ = 0:−1/ϕ = 0
Fur die in Abbildung 6.2 dargestellte Simulation war es erforderlich, den Materialparameter
kc,⊥ von 30.00 auf 300.00 zu setzen. Aufgrund der Verzehnfachung dieses Parameters im
Vergleich zum ursprunglichen Wert ist eine Verbesserung des Ergebnisses im plastischen
Bereich moglich.
Eine Reduktion des Elastizitatsmoduls langs zur Faser zur Anpassung des Simulationser-
gebnisses an die Spannungs-Verzerrungs-Kurve des Versuches brachte keine Verbesserung.
Deshalb wurde der initiale Wert von EL = 12000 N/mm2 fur die Simulation dieses Versu-
ches belassen.
Ab σL ≈ -6.0 N/mm2 ist eine Reduktion der Spannungen erkennbar. Im Versuch wird dieser
Wert nicht erreicht. Bei Betrachtung des Spannungspfades erkennt man, dass die unter-
schiedlichen Verlaufe aus Versuch und Simulation annahernd die gleiche Tendenz besitzen.
Page 97
Versuchssimulation mit dem Materialmodell 6.1: Direkte Versuchssimulation 92
6.1.3 Zugversagen in Faserrichtung
Abbildung 6.3: Direkte Versuchssimulation von Versuch Nr. 144 mit κ =+1:0/ϕ = 0
Fur die in Abbildung 6.3 dargestellte Simulation war es erforderlich den Materialparameter
EL = 13000 N/mm2 zu setzen, dieser Wert liegt noch innerhalb des in Unterkapitel 3.2
angegebenen Streuungsbereiches.
Das Spannungs-Verzerrungs-Diagramm fur σL zeigt ab σL ≈ 65.0 N/mm2 die im Versuch
beobachtete Entfestigung.
Das Spannungs-Verzerrungs-Diagramm fur σR zeigt, dass schon ab σR ≈ 1.3 N/mm2 Ent-
festigung prognostiziert wird. Im Versuch tritt Entfestigung quer zur Faser erst bei σR ≈2.6 N/mm2 auf. Die durch die Simulation beobachtete Entfestigung von σL ist durch die
gleichzeitig auftretende Entfestigung von σR zu begrunden.
Die Fließflache im orthotropen Spannungsraum wird aufgrund der festgestellten Entfestigung
in Langsrichtung entsprechend gestaucht.
Page 98
Versuchssimulation mit dem Materialmodell 6.1: Direkte Versuchssimulation 93
6.1.4 Druckversagen parallel zur Faserrichtung
Abbildung 6.4: Direkte Versuchssimulation von Versuch Nr. 222 mit κ =−1:0/ϕ = 0
Fur die in Abbildung 6.4 dargestellte Simulation war es erforderlich ER = 500 N/mm2 zu set-
zen. Dieser Wert liegt noch innerhalb des in Abschnitt 3.2 angegebenen Streuungsbereiches.
Außerdem wurde kc,‖ von 5.03 auf 503.00 gesetzt. Aufgrund der Verhundertfachung dieses
Parameters, im Vergleich zum ursprunglichen Wert, ist eine Verbesserung des Ergebnisses
im plastischen Bereich moglich. Die Ursache fur die Anderung ist jedoch im Materialver-
such uber der, fur das makroskopische Materialmodell kritischen charakteristischen Lange,
deutlich großeren charakteristischen Lange zu suchen.
Das Spannungs-Verzerrungs-Diagramm fur σL stellt gute Ubereinstimmung mit dem Ver-
such dar. Da die elastische Grenzdruckspannung parallel zur Faser ≈ 49.9 N/mm2 betragt,
treten auch erst ab diesem Spannungswert plastische Verformungen auf. Im vorliegenden
Einzelversuch betragt diese elastische Grenzdruckspannung ≈ 43.0 N/mm2.
Das Spannungs-Verzerrungs-Diagramm fur σR zeigt, dass trotz ahnlicher Probleme mit dem
initialen Verzerrungszustand wie in Abschnitt 6.1.1, eine recht gute Ubereinstimmung mit
den Versuchsergebnissen moglich ist.
Page 99
Versuchssimulation mit dem Materialmodell 6.2: Vergleichende Versuchssimulation 94
6.2 Vergleichende Versuchssimulation
Aufgrund der angesprochenen erforderlichen, zweifachen Verschiebung der Spannungs-Ver-
zerrungs-Diagramme und der daraus resultierenden unterschiedlichen Verzerrungspfade, fur
ein und denselben Versuch, ist man zu einer anderen Art von Versuchssimulationen uberge-
gangen. Fur die beiden folgenden Methoden der Versuchssimulation wird deshalb von einem
idealen Verzerrungszustand ausgegangen, der unabhangig von den Versuchsergebnissen ist.
Da sich jeder Einzelversuch durch ein konstantes Beanspruchungsverhaltnis κ = u : v aus-
zeichnet, wird dieses Verhaltnis dem Verhaltnis der Verzerrungen in den Beanspruchungs-
hauptrichtungen κ = ε11 : ε22 gleichgesetzt. Aufgrund des initial orthotrop elastischen
Verhaltens von Holz erhalt man nach Mackenzie-Helnwein et al. [11] die Gleitung γ12
aus dem elastischen Gesetz (3.1) und der Bedingung τ12 = 0 zu
γ12 = − 1
C1212
(C1211 ε11 + C1222 ε22) , (6.1)
wobei sich die Komponenten des Materialtensors C in Abhangigkeit vom Faserwinkel ϕ wie
folgt ergeben:
C1212 =ER + EL − 2 νLRER
4 ∆sin2 2ϕ+GLR cos2 2ϕ , (6.2)
C1211 =EL − ER
4 ∆sin 2ϕ+
1
4
(EL + ER
2 ∆− νLR ER − 2GLR
)
sin 4ϕ , (6.3)
C1222 =EL − ER
4 ∆sin 2ϕ− 1
4
(EL + ER
2 ∆− νLR ER − 2GLR
)
sin 4ϕ , (6.4)
wobei ∆ = 1 − νLR νRL und νRL = νLR ER/EL gilt. Fur ϕ = 0 betragt die Kompo-
nente γ12 des idealen Verzerrungszustandes gleich null. GLR erhalt man aus Gleichung (3.3).
Durch Vorgabe einer Komponente des idealen Verzerrungszustandes ergeben sich somit die
verbleibenden Komponenten.
Im Gegensatz zur direkten Versuchssimulation werden nun alle Versuche einer Versuchs-
konfiguration ϕ, κ betrachtet. In den folgenden Abschnitten werden die vergleichende
Versuchssimulation fur jene Versuchskonfigurationen durchgefuhrt, zu denen die in Unterka-
pitel 6.1 dargestellten Versuche angehoren.
Die hervorgehobenen blauen Linien entsprechen jeweils den Ergebnissen einer Simulation,
auf der Basis des idealen Verzerrungspfades. Die restlichen vollausgezogenen Linien ent-
sprechen wiederum den Versuchsergebnissen, wobei auf die Berechnung und die Darstellung
des initialen Verzerrungszustandes verzichtet wurde. Um die Versuchsergebnisse mit der Si-
mulation vergleichen zu konnen, ist es deshalb erforderlich, die Verlaufe aus den Versuchen
gedanklich durch den Ursprung des Koordinatensystems zu verschieben.
Zusatzlich werden in jedem Abschnitt jene Materialparameter angegeben, die im Zuge der
individuellen Versuchssimulation verandert wurden. Mit dieser Methode der Versuchssimu-
lation wird nur ein Beanspruchungsverhaltnis betrachtet, eine Beurteilung der Ubereinstim-
mung ist somit nach wie vor nur fur jeweils einen Bereich im orthotropen Spannungsraum
moglich.
Page 100
Versuchssimulation mit dem Materialmodell 6.2: Vergleichende Versuchssimulation 95
6.2.1 Zugversagen quer zur Faserrichtung
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
3
4
5
6
7
σL [N/mm2]
σ R [N
/mm
2 ]
089090091155156157437Simulation
Abbildung 6.5: Vergleichende Versuchssimulation von Konfiguration κ=0:+1/ϕ=0
Die Zahlen bezeichnen die Versuchsnummer nach [5]. Da der linear elastische Bereich bei
den Versuchen nicht beim Versuchsstart beginnt, wurden die aufgetretenen Fertigungstole-
ranzen zwischen Probekorper und Belastungseinrichtung durch die gewahlte Vorspannung
nicht vollstandig beseitigt. Die fur die Simulation erforderlichen Materialparameter und
Kennwerte sind in Tabelle 6.2 zusammengestellt.
Tabelle 6.2: Materialparameter fur alle Versuche der Konfiguration κ = 0:+1/ϕ = 0
EL = 12000 N/mm2 κ = 0:+1
ER = 500 N/mm2 ϕ = 0
νLR = 0.80 max ε22 = +0.050
Die Simulation zeigt, dass ab einer elastischen Grenzspannung von σR ≈ 4.5 N/mm2 die
in den entsprechenden Versuchen beobachtete Entfestigung auftritt. Dies entspricht einem
faserparallelen Riss.
Page 101
Versuchssimulation mit dem Materialmodell 6.2: Vergleichende Versuchssimulation 96
6.2.2 Duktiles Verhalten unter Druck normal zur Faserrichtung
−7 −6 −5 −4 −3 −2 −1 0−9
−8
−7
−6
−5
−4
−3
−2
−1
0
σL [N/mm2]
σ R [N
/mm
2 ]
043044045248249988997998Simulation
Abbildung 6.6: Vergleichende Versuchssimulation von Konfiguration κ = 0:−1/ϕ = 0
Die Zahlen bezeichnen die Versuchsnummer nach [5]. Die fur die Simulation erforderlichen
Materialparameter und Kennwerte sind in Tabelle 6.3 zusammengestellt.
Tabelle 6.3: Materialparameter fur alle Versuche der Konfiguration κ = 0:−1/ϕ = 0
EL = 12000 N/mm2 κ = 0:−1
ER = 700 N/mm2 ϕ = 0
kc,⊥ = 300 min ε22 = -0.020
Die Simulation zeigt, dass ab einer elastischen Grenzspannung von σR ≈ -4.0 N/mm2 die
in den entsprechenden Versuchen beobachtete Verfestigung auftritt. Bei der vorliegenden
rein einaxialen Druckbeanspruchung quer zur Faser verlauft der Spannungspfad der Simu-
lation im plastischen Bereich tendenziell in eine andere Richtung als der Versuch. Dies ist
durch eine große Sensibilitat des Modells bezuglich der Materialparameter ausschließlich in
diesem Grenzfall begrundet. Im allgemeinen Fall ist diese Sensibilitat nicht vorhanden, wie
in Unterkapitel 6.3 gezeigt werden wird.
Page 102
Versuchssimulation mit dem Materialmodell 6.2: Vergleichende Versuchssimulation 97
6.2.3 Zugversagen in Faserrichtung
0 10 20 30 40 50 60 70 80 90−1
0
1
2
3
4
5
σL [N/mm2]
σ R [N
/mm
2 ]
143144145318319320436Simulation
Abbildung 6.7: Vergleichende Versuchssimulation von Konfiguration κ = +1:0/ϕ = 0
Die Zahlen bezeichnen die Versuchsnummer nach [5]. Die fur die Simulation erforderlichen
Materialparameter und Kennwerte sind in Tabelle 6.4 zusammengestellt.
Tabelle 6.4: Materialparameter fur alle Versuche der Konfiguration κ =+1:0/ϕ = 0
EL = 13000 N/mm2 κ = +1:0
ER = 700 N/mm2 ϕ = 0
νLR = 0.50 max ε11 = +0.020
Die Simulation zeigt, dass die Entfestigung in zwei Phasen auftritt. Nachdem Entfestigung
quer zur Faser auftritt (Bereich 0.005 ≤ ε11 ≤ 0.006), tritt die Verfestigung in Faserrichtung
auf. Aufgrund der Nichtberucksichtigung des initialen Verzerrungszustandes der Versuche
treten plastische Verformungen bei entsprechend hoherer elastischer Grenzspannung auf.
Das vorliegende Einflachen-Plastizitatsmodell erfasst diesen Effekt richtig.
Page 103
Versuchssimulation mit dem Materialmodell 6.2: Vergleichende Versuchssimulation 98
6.2.4 Druckversagen parallel zur Faserrichtung
−50 −45 −40 −35 −30 −25 −20 −15 −10 −5 0−2
−1.5
−1
−0.5
0
0.5
1
σL [N/mm2]
σ R [N
/mm
2 ]
221222233364365366Simulation
Abbildung 6.8: Vergleichende Versuchssimulation von Konfiguration κ = −1:0/ϕ = 0
Die Zahlen bezeichnen die Versuchsnummer nach [5]. Die fur die Simulation erforderlichen
Materialparameter und Kennwerte sind in Tabelle 6.5 zusammengestellt.
Tabelle 6.5: Materialparameter fur alle Versuche der Konfiguration κ = −1:0/ϕ = 0
EL = 12000 N/mm2 κ = −1:0
ER = 500 N/mm2 ϕ = 0
kc,‖ = 503 min ε11 = -0.100
Die Simulation zeigt, dass schon ab einer Verzerrung von ε22 ≈ 0.004 plastische Verformun-
gen auftreten. Trotz der Wahl von kc,‖ = 503 tritt die in den entsprechenden Versuchen
beobachtete Entfestigung nur eher gering auf.
Die Versuche entsprechen offensichtlich nicht dem idealen Verzerrungszustand, da der theo-
retisch einaxiale Verzerrungszustand eine der Langsspannung proportionale Querspannung
hervorrufen musste, wie in der Simulation mit dem idealen Verzerrungszustand ersichtlich
ist.
Page 104
Versuchssimulation mit dem Materialmodell 6.3: Indirekte Versuchssimulation 99
6.3 Indirekte Versuchssimulation
Die dritte und letzte Methode der durchgefuhrten Versuchssimulation stellt die leistungs-
starkste Variante dar. Mittels dieser Methode ist es moglich, die in [5] dargestellten Ver-
sagensdiagramme zu berechnen. Diese Diagramme stellen eine Sammlung der Bruchpunkte
und der Spannungspfade aller biaxialen Versuche mit je einem konstanten Faserwinkel dar.
Da funf Faserwinkel untersucht wurden, ergeben sich somit funf Diagramme.
Die Abbildungen 6.9, 6.11, 6.13, 6.15 und 6.17 stammen aus [5]. Die Abbildungen 6.10, 6.12,
6.14, 6.16 und 6.18 fassen die entsprechenden Ergebnisse der indirekten Versuchssimulation
zusammen. Tabelle 6.6 stellt die in den erwahnten Abbildungen dargestellten Versuchskon-
figurationen ϕ, κ zusammen. Insgesamt werden 77 Versuchskonfigurationen untersucht.
Tabelle 6.6: Dargestellte Versuchskonfigurationen
κ 0 7.5 15 30 45
−10 : +3 - x x x x−7 : +4 - - - - x−4 : −5 - - x - -−4 : +5 x x - x x−3 : −5 x - x x -−2 : −5 - x - - -−2 : +5 x x x x x−1 : −10 x - - - -−1 : −5 x x x - -−1 : −1 - - - - x−1 : 0 x x x x x−1 : +1 - - x - -
0 : −1 x x x x x0 : +1 x x x x x
+1 : −10 x x - - -+1 : −2 x x x - -+1 : 0 x x x x x+1 : +1 - - - - x+2 : +5 x x x x x+3 : −10 x x x - x+3 : −5 x - - - -+5 : −4 x x x x x+5 : −2 x x x x x+5 : +2 x x x x x
+13 : −50 - - x - -
Wie bereits erwahnt, werden fur die indirekte Versuchssimulation ideale Verzerrungszustande
betrachtet, die sich durch Vorgabe des Beanspruchungsverhaltnisses κ und Gleichung (6.1)
ergeben. Fur die Simulationen werden Grenzverzerrungen von bis zu ±0.018 fur die großte
Verzerrungskomponente gewahlt. Fur die in Tabelle 6.6 rot markierten einaxialen Beanspru-
chungsverhaltnisse werden Grenzverzerrungen von bis zu ±0.050 gewahlt.
Page 105
Versuchssimulation mit dem Materialmodell 6.3: Indirekte Versuchssimulation 100
-75 -50 -25 0 25 50 75 100 1 N mm 2
-10
-5
0
5
10
15
2
N mm 2
0
5 : 2 5 : 4 3 : 5 1 : 2 3 : 10 1 : 10 0 : 1 1 : 10 1 : 5 3 : 5 1 : 0
4 : 5
2 : 5
0 : 1
2 : 5
5 : 2
1 : 0
Abbildung 6.9: Ergebnisse der biaxialen Versuche fur ϕ = 0 nach [5]
−70 −60 −50 −40 −30 −20 −10 0 10 20 30 40 50 60 70−6
−5
−4
−3
−2
−1
0
1
2
3
4
5
6
σ1 [N/mm2]
σ 2 [N/m
m2 ]
κ=+1:0κ=+5:+2κ=+2:+5κ=+1:−10κ=+3:−10κ=+1:−2κ=+3:−5κ=+5:−4κ=+5:−2κ=0:+1κ=−2:+5κ=−4:+5κ=−1:0κ=−3:−5κ=−1:−5κ=−1:−10κ=0:−1
Abbildung 6.10: Ergebnisse der Versuchssimulation fur ϕ = 0
Bei allen Diagrammen sind jeweils die Spannungshauptachsen der ebenen Beanspruchung fur
das Koordinatensystem herangezogen worden. Deshalb sind die Hauptachsen der gedachten
Bruchkurven mit elliptischer Form etwa um einen den Faserwinkel ϕ entsprechenden Winkel
gegenuber der σ1-Achse geneigt.
Fur die Versuchssimulationen werden die erforderlichen Daten in das Materialhauptsystem
transformiert. Durch Rucktransformation der ermittelten Spannungspfade vom LR-System
in das dazu um −ϕ gedrehte Referenzsystem nach [5] erhalt man die, in den Abbildungen
6.10, 6.12, 6.14, 6.16 und 6.18 dargestellten, Spannungen σ1 und σ2.
Page 106
Versuchssimulation mit dem Materialmodell 6.3: Indirekte Versuchssimulation 101
-60 -40 -20 0 20 40 60 80 1 N mm 2
-10
-5
0
5
10
15
2
N mm 2
7.5
5 : 2 5 : 4 1 : 2 3 : 10 1 : 10 0 : 1 1 : 5 2 : 5 1 : 0
10 : 3
4 : 5
2 : 5
0 : 1
2 : 5
5 : 2
1 : 0
Abbildung 6.11: Ergebnisse der biaxialen Versuche fur ϕ = 7.5 nach [5]
−50 −40 −30 −20 −10 0 10 20 30 40 50−6
−5
−4
−3
−2
−1
0
1
2
3
4
5
6
σ1 [N/mm2]
σ 2 [N/m
m2 ]
κ=+1:0κ=+5:+2κ=+2:+5κ=+1:−10κ=+3:−10κ=+1:−2κ=+5:−4κ=+5:−2κ=0:+1κ=−2:+5κ=−4:+5κ=−10:+3κ=−1:0κ=−2:−5κ=−1:−5κ=−0:−1
Abbildung 6.12: Ergebnisse der Versuchssimulation fur ϕ = 7.5
Da es sich dabei theoretisch exakt und praktisch in guter Naherung um Hauptspannungs-
zustande handelt, ist die zugehorige Schubspannung τLR ≈ 0. Sie muss deshalb nicht
gesondert dargestellt werden.
Bei Zugbeanspruchungen parallel und quer zur Faser wird der in den Versuchen beobachtete
Riss und das daraus resultierende Versuchsende richtig wiedergegeben. Ab der elastischen
Grenzspannung tritt die von der charakteristischen Lange abhangige Entfestigung auf. Da `c
nur mit 5 mm gewahlt wurde, anstatt einem dem Probekorper entsprechenden Wert (siehe
Abschnitt 4.2.5), tritt Entfestigung nicht so gravierend, wie beim Versuch festgestellt, auf.
Page 107
Versuchssimulation mit dem Materialmodell 6.3: Indirekte Versuchssimulation 102
-40 -20 0 20 40 60 1 N mm 2
-10
-5
0
5
10
15
2
N mm 2
15
5 : 2 5 : 4 1 : 2 3 : 10 13 : 50 0 : 1 1 : 5 3 : 5 4 : 5 1 : 0
10 : 3
1 : 1
2 : 5
0 : 1
2 : 5
5 : 2
1 : 0
Abbildung 6.13: Ergebnisse der biaxialen Versuche fur ϕ = 15 nach [5]
−40 −30 −20 −10 0 10 20 30 40−6
−5
−4
−3
−2
−1
0
1
2
3
4
5
6
σ1 [N/mm2]
σ 2 [N/m
m2 ]
κ=+1:0κ=+5:+2κ=+2:+5κ=+13:−50κ=+3:−10κ=+1:−2κ=+5:−4κ=+5:−2κ=0:+1κ=−2:+5κ=−1:+1κ=−10:+3κ=−1:0κ=−4:−5κ=−3:−5κ=−1:−5κ=0:−1
Abbildung 6.14: Ergebnisse der Versuchssimulation fur ϕ = 15
Bei Druckbeanspruchungen quer zur Faser tritt die Verfestigung zu gering auf, da, wie in
Abschnitt 6.1.2 bereits festgestellt, der Verfestigungsparameter kc,⊥ zu klein gewahlt wurde.
Deshalb uberwiegt bei der Kombination mit Zugbeanspruchungen parallel zur Faser Entfes-
tigung parallel zur Faser.
Bei Druckbeanspruchungen parallel zur Faser tritt die Entfestigung zu gering auf. Da der
Entfestigungsparameter kc,‖ von der charakteristischen Lange abhangt, tritt bei entsprechen-
den Beanspruchungskombinationen nahezu keine Entfestigung auf.
Page 108
Versuchssimulation mit dem Materialmodell 6.3: Indirekte Versuchssimulation 103
-30 -20 -10 0 10 20 30 40 1 N mm 2
-10
-5
0
5
10
15
2
N mm 2
30
5 : 2 5 : 4 0 : 1 3 : 5 1 : 0
10 : 3
4 : 5
2 : 5
0 : 1
2 : 5
5 : 2
1 : 0
Abbildung 6.15: Ergebnisse der biaxialen Versuche fur ϕ = 30 nach [5]
−20 −15 −10 −5 0 5 10 15 20−10
−8
−6
−4
−2
0
2
4
6
8
10
σ1 [N/mm2]
σ 2 [N/m
m2 ]
κ=+1:0κ=+5:+2κ=+2:+5κ=+5:−4κ=+5:−2κ=0:+1κ=−2:+5κ=−4:+5κ=−10:+3κ=−1:0κ=−3:−5κ=0:−1
Abbildung 6.16: Ergebnisse der Versuchssimulation fur ϕ = 30
Zur indirekten Versuchssimulation wurden alle Materialparameter gemaß Tabelle 6.1 unter
Zugrundelegung des modifizierten Parametersatzes p1 eingesetzt.
Die in den Abschnitten 6.1 und 6.2 festgestellten Unterschiede zwischen den Materialpara-
metern werden nicht berucksichtigt.
Aufgrund der betrachtlichen Rohdichteunterschiede (siehe [5]) und der damit verbundenen
Variation der Steifigkeiten innerhalb eines Stammes gibt es Unterschiede zwischen den elas-
tischen Konstanten zwischen den Probekorpern. Diese konnen bei der Simulation nicht
berucksichtigt werden.
Page 109
Versuchssimulation mit dem Materialmodell 6.3: Indirekte Versuchssimulation 104
-15 -10 -5 0 5 10 15 20 1 N mm 2
-10
-5
0
5
10
15
2
N mm 2
45
5 : 2 5 : 4 4 : 7 3 : 10 0 : 1 1 : 1 1 : 0
10 : 3
7 : 4
4 : 5
2 : 5
0 : 1
2 : 5
1 : 1
5 : 2
1 : 0
Abbildung 6.17: Ergebnisse der biaxialen Versuche fur ϕ = 45 nach [5]
−10 −8 −6 −4 −2 0 2 4 6 8 10−10
−8
−6
−4
−2
0
2
4
6
8
10
σ1 [N/mm2]
σ 2 [N/m
m2 ]
κ=+1:0κ=+5:+2κ=+1:+1κ=+3:−10κ=+4:−7κ=+5:−4κ=+5:−2κ=+2:+5κ=0:+1κ=−2:+5κ=−4:+5κ=−10:+3κ=−1:0κ=−1:−1κ=0:−1
σL + σR√
2
τLR
Abbildung 6.18: Ergebnisse der Versuchssimulation fur ϕ = 45
Im orthotropen Spannungsraum entsprechen die Bildebenen, der in den Abbildungen 6.9 bis
6.18 dargestellten Diagramme, jeweils einer gegenuber der σL-σR-Ebene um den Winkel 2ϕ
gedrehten Ebene. Die dargestellten Bruchpunkte liegen naherungsweise auf den Schnittkur-
ven dieser Ebenen mit der Bruchflache im orthotropen Spannungsraum.
Fur ϕ = 45 wird deshalb auf der Abszisse die Schubspannung τLR aufgetragen (siehe Ab-
bildung 6.18). Der Entfestigungsparameter kshr hangt gemaß Unterabschnitt 4.2.3.6 von
der charakteristischen Lange ab. Da `c nur mit 5 mm gewahlt wurde, anstatt einem dem
Probekorper entsprechenden Wert, tritt Entfestigung nicht so gravierend auf.
Page 110
Versuchssimulation mit dem Materialmodell 6.4: Vergleich 105
Bei Betrachtung der Abbildungen 6.10, 6.12, 6.14, 6.16 und 6.18 fallen die unterschiedlich
dargestellten Spannungspfade auf. Der entsprechende Spannungspfad wird strichliert dar-
gestellt, wenn die, zur Berechnung des idealen Verzerrungspfades erforderliche Verzerrungs-
komponente ε11 ein negatives Vorzeichen besitzt. Bei Vorgabe einer Verzerrungskomponente
ε11 mit positivem Vorzeichen wird der entsprechende Spannungspfad mit voller Linie darge-
stellt. Bei den Spezialfallen κ = 0:+1 und κ = 0:−1 ist ε22 anstelle von ε11 vorzugeben.
Zusammenfassend stellt man fest, dass die indirekte Versuchssimulation die anschaulichste
Variante darstellt um das entwickelte Materialmodell zu uberprufen. Man stellt weiters fest,
dass das Einflachen-Plastizitatsmodell mit nicht-assoziierter Verfestigungsregel ein gutgeeig-
netes Materialmodell fur fehlerfreies Fichtenholz darstellt.
6.4 Vergleich der vorgestellten Simulationsvarianten
Die drei prasentierten Arten der Versuchssimulation unterscheiden sich hauptsachlich durch
die Anzahl der jeweilig betrachteten Versuche. Dadurch ergeben sich weitere Unterschiede,
die in Tabelle 6.7 zusammengefasst sind.
Tabelle 6.7: Unterschiede der vorgestellten Simulationsvarianten
Direkte Vergleichende Indirekte
Simulation Simulation Simulation
nach 6.1 nach 6.2 nach 6.3
Bezeichnung Versuchs- Versuchs- Faser-
der Variante nummer konfiguration winkel
Anzahl- 1 ≈ 6 ≈ 90
der Versuche
Verwendete aus dem idealer idealer
Verzerrungspfade Versuch Verzerrungspfad Verzerrungspfad
Anpassung ja ja nein
der Parameter
Darstellung σ-ε- σL-σR- σ1-σ2-
der Ergebnisse Diagramme Diagramme Diagramme
Beurteilungs- detailliert detailliert generell
moglichkeit
In diesem Kapitel wurde das in dieser Arbeit entwickelte Materialmodell mittels unterschied-
licher Versuchssimulationen angewandt. Es wurden die vier unterschiedlichen Versagensme-
chanismen von Fichtenholz, durch Einfuhrung von Evolutionsgesetzen fur funf verschiedenen
charakteristischen Festigkeiten, im wesentlichen richtig erfasst. Die auftretende Entfestigung
bei Zugbeanspruchungen wurde richtig wiedergegeben. Die Verfestigung bei Druckbeanspru-
chungen quer zur Faser wird zufriedenstellend dargestellt.
Page 111
Kapitel7Zusammenfassung und Ausblick
7.1 Zusammenfassung
Die Zielsetzung der vorliegenden Arbeit bestand in der Entwicklung eines Einflachen-Plas-
tizitatsmodells fur fehlerfreies Fichtenholz unter biaxialen Beanspruchungszustanden. Be-
trachtet wurden ebene Beanspruchungszustande in der LR-Ebene eines Stammes. Den Aus-
gangszustand stellten die 439 durchgefuhrten biaxialen Versuche an fehlerfreiem Fichten-
holz nach Eberhardsteiner [5] und ein existierendes Mehrflachen-Plastizitatsmodell nach
Mackenzie-Helnwein et al. [12] dar.
Der Werkstoff Holz wurde dabei als makroskopisch homogenes Material betrachtet. Die Be-
schreibung des mechanischen Verhaltens von Holz erfolgt im Rahmen der Plastizitatstheorie
fur orthotrope Werkstoffe.
Zur Beschreibung des elasto-plastischen Materialverhaltens wurde ein Einflachenmodell nach
Tsai und Wu [24] herangezogen, dessen Form mittels eines nicht-assoziierten Ver- bzw.
Entfestigungsgesetzes, bestehend aus sechs Evolutionsgesetzen fur funf verschiedene charak-
teristische Festigkeiten und fur ein Festigkeitsverhaltnis, gesteuert wird. Die mathematische
Form der Fließbedingung selbst bleibt bei beliebiger Beanspruchung unverandert. Mittels
des Newton-Raphson-Iterationsverfahrens werden die Parameter der Fließflache geeignet
ermittelt. Die numerische Zeitintegration des Materialmodells wird durch Anwendung des
Projektionsverfahrens nach Simo und Hughes [23] bewerkstelligt. Der große rechentech-
nische Aufwand dieser Vorgangsweise konnte durch Portionierung des Problems deutlich
reduziert werden.
Damit wurden durch Vorgabe eines idealen Verzerrungszustandes, der den Einfluss der me-
chanischen Versuchsparameter (Faserwinkel ϕ und Beanspruchungsverhaltnis κ) berucksich-
tigt, die funf in Eberhardsteiner [5] dargestellten Versagensdiagramme simuliert. Auf
dieser Basis wurde eine Evaluierung des entwickelten Materialmodells durchgefuhrt.
Page 112
Zusammenfassung und Ausblick 7.2: Ausblick 107
Folgende Merkmale des Materialmodells wurden dabei festgestellt:
• Bei Zugbeanspruchungen quer zur Faser und gemischter Beanspruchung (Zug-Schub)
wird die in den Versuchen beobachtete Entfestigung richtig modelliert. Dies entspricht
einem faserparallelen Riss.
• Bei Druckbeanspruchungen quer zur Faser tritt die Verfestigung zu gering auf, weil
sich der angenommene Verfestigungsparameter kc,⊥ aus dem Mehrflachenmodell fur
die vorliegende Formulierung als zu klein erweist.
• Bei Zugbeanspruchungen parallel zur Faser tritt, ab der elastischen Grenzspannung,
die von der charakteristischen Lange abhangige Entfestigung auf.
• Bei Druckbeanspruchungen parallel zur Faser zeigen sich die wesentlichen Merkmale
der Entfestigung. Da die charakteristische Lange des Probekorpers deutlich großer ist
als die des Materialmodells, kann die im Versuch beobachtete abrupte Entfestigung auf
der Basis eines materiellen Punktes nicht vollstandig wiedergegeben werden.
7.2 Ausblick
Eine verbesserte Identifikation der verwendeten Materialparameter fur Ver- und Entfestigung
ist empfehlenswert. Erganzende eindimensionale Versuche an kleinen Proben zur Bestim-
mung des Nachbruchverhaltens (`c < `c,critical) waren wunschenswert.
Um die charakteristischen Lange `c und deren Einfluß auf die Berechnungsergebnisse richtig
berucksichtigen zu konnen, ist die Implementierung in ein Finite Element Programm erfor-
derlich. Mit Hilfe dessen ist das Materialmodell auf den gesamten Probekorper anwendbar.
Damit wird eine wesentlich bessere Moglichkeit in der Versuchssimulation und der Vorhersage
des Materialverhaltens gegeben.
Fur die Festlegung des Restreibungswinkels φ∞ und die einwandfreie Identifikation des di-
mensionslosen Entfestigungsparameters kshr sind weitere experimentelle und numerische Un-
tersuchungen erforderlich. Diese betreffen primar gemischte Beanspruchung durch Schub-
und Zugspannung.
Weitere Untersuchungen im linear elastischen Bereich von Holz sind sinnvoll. Die mathema-
tisch richtige Behandlung des Messfehlers der Versuchsdaten tragt zur richtigen Bestimmung
der elastischen Konstanten aus den Versuchsdaten bei.
Um das Materialmodell fur andere Nadelholzer anwenden zu konnen, ist die Bestimmung der
entsprechenden Festigkeiten analog zu den fur Fichtenholz durchgefuhrten experimentellen
Untersuchungen erforderlich. Aufgrund der unterschiedlichen Mikrostruktur von Laub- und
Nadelholzern wurde eine Anpassung der Ver- und Entfestigungsgesetze fur Laubholzer eine
grundlegende Studie der entsprechenden Versagensmechanismen erfordern.
Eine Erweiterung zur Berucksichtigung relevanter Holzmerkmale wie Aste und Wachstums-
fehler durch Modifikation der jeweiligen Parameter der Fließflache ware der nachste logische
Schritt zur realitatsnahen Beschreibung von Bauholz.
Page 113
Literaturverzeichnis
[1] J. Betten: Tensorrechnung fur Ingenieure. Teubner, 1987.
[2] DIN 1052: Entwurf, Berechnung und Bemessung von Holzbauwerken – Allgemeine Be-
messungsregeln und Bemessungsregeln fur den Hochbau, 2000.
[3] DIN 52182: Prufung von Holz – Bestimmung der Rohdichte, 1976.
[4] DIN 52183: Prufung von Holz – Bestimmung des Feuchtigkeitsgehaltes, 1977.
[5] J. Eberhardsteiner: Mechanisches Verhalten von Fichtenholz – Experimentelle Bestim-
mung der biaxialen Festigkeitseigenschaften. Springer-Verlag, 2002.
[6] J. Eberhardsteiner, M. Gingerl & L. Ondris: Beurteilung der Meßgenauigkeit eines
3D-ESPI-Systems bei der biaxialen Festigkeitsprufung von Holz. In GESA-Symposium
1996, Experimentelle Beanspruchungsanalyse, neue Entwicklungen und Anwendungen,
Schliersee, Deutschland, 1996.
[7] M. Gingerl: Realisierung eines optischen Deformationsmeßsystems zur experimentellen
Untersuchung des orthotropen Materialverhaltens von Holz bei biaxialer Beanspruchung.
Dissertation, Fakultat fur Bauingenieurwesen, Technische Universitat Wien, 1998.
[8] F. Kollmann: Technologie des Holzes und der Holzwerkstoffe. Springer-Verlag, 1982.
[9] S.G. Lekhnitskij: Theory of Elasticity of an Anisotropic Body. Mir Publishers, Moskau,
1981.
[10] J. Lubliner: Plasticity Theory. Macmillan Publishing Company, New York, 1990.
[11] P. Mackenzie-Helnwein, J. Eberhardsteiner and H.A. Mang: Short-term mechanical be-
havior of biaxially stressed wood: Experimental observations and constitutive modeling
as an orthotropic two-surface elasto-plastic material. Wood Science and Technology,
2003, submitted for publication.
[12] P. Mackenzie-Helnwein, J. Eberhardsteiner and H.A. Mang: A Multi-Surface Plasticity
Model for Clear Wood and its Application to the Finite Element Analysis of Structural
Details. Computational Mechanics, Vol. 31, 1-2, 204–218, 2003.
[13] H.A. Mang und G. Hofstetter: Festigkeitslehre, Springer-Verlag, 2000.
Page 114
LITERATURVERZEICHNIS 109
[14] P. Niemz: Physik des Holzes und der Holzwerkstoffe, DRW-Verlag, 1993.
[15] J. Oliver: A consistent characteristic length for smeared cracking models. International
Journal for Numerical Methods in Engineering, Vol. 28, 461–474, 1989.
[16] ONORM B 3012: Holzarten – Benennungen, Kurzzeichen und Kennwerte, 1998.
[17] ONORM B 4100-2: Holzbau – Holztragwerke – Berechnung und Ausfuhrung, 1997.
[18] ONORM EN 338: Bauholz fur tragende Zwecke – Festigkeitsklassen, 2001.
[19] ONORM ENV 1995-1-1: EUROCODE 5-Bemessung und Konstruktion von Holzbauten
– Teil 1-1: Allgemeine Bemessungsregeln und Regeln fur den Hochbau, 1995.
[20] F. Pulay: Entwicklung einer Versuchseinrichtung zur Bestimmung des Verformungsver-
haltens von Holz bei zweiachsiger Beanspruchung bis zum Bruch. Dissertation, Fakultat
fur Bauingenieurwesen, Technische Universitat Wien, 1994.
[21] SIA 164: Holzbau – Verstandigung, Planung, Berechnung und Bemessung, Material,
Ausfuhrung, Uberwachung und Unterhalt, 1992.
[22] J.C. Simo and R.L. Taylor: Consistent Tangent Operators for Rate-Independent Elasto-
plasticity. Computer Methods in Applied Mechanics and Engineering, Vol. 48, 101–118,
1985.
[23] J.C. Simo and T.J.R. Hughes: Computational Inelasticity. Interdisciplinary Applied
Mathematics. Springer-Verlag, 1998.
[24] S.W. Tsai and E.M. Wu: A general theory of strength for anisotropic materials. Journal
of Composite Materials, Vol. 5, 58–80, 1971.
[25] S. Weihe: Modelle der fiktiven Rissbildung zur Berechnung der Initiierung und Ausbrei-
tung von Rissen – ein Ansatz zur Klassifizierung, Dissertation, Universitat von Stutt-
gart, 1995.
[26] S. Weihe: Failure induced anisotropy in the framework of multi-surface plasticity. In
T.J.R. Owen, E. Onate and E. Hinton, editors. Computational Plasticity, Fundamentals
and Applications, 1049–1056, CIMNE, Barcelona, 1997.
[27] S. Weihe, B.Kroplin and R. de Borst: Classification of smeared crack models based on
material and structural properties. International Journal of Solids and Structures, Vol.
35 (12), 1289–1308, 1998.
[28] O.C. Zienkiewicz and R.L. Taylor: The Finite Element Method, Fourth ed., Vol. 2.
McGraw-Hill, London, 1991.
Page 115
AnhangAKoeffizientenfunktionen der Matrix K
K ist die Matrix der Ableitungen der sechs, im Vektor Rp (4.171) zusammengefassten, Glei-
chungen nach den sechs, im Vektor p (4.92) zusammengefassten, Parametern des Ellipsoids.
Die Zuordnung der jeweiligen Koeffizientenfunktionen ∂Rp,i/∂pj, mit i, j ∈ 1, ..., 6 zur
Matrix K erfolgt gemaß (4.174).
Aufgrund der Gleichheit der ersten und zweiten bzw. dritten und vierten Eintrage des Vek-
tors Rp gemaß (4.171), mit Ausnahme jeweils eines Vorzeichenunterschiedes, sind die ent-
sprechenden Koeffizientenfunktionen ∂Rp,i/∂pj, mit i ∈ 1, 2 bzw. 3,4 zu einem Block
von Gleichungen zusammengefasst. Die Abkurzungen X und Z sind in (4.119) und (4.118)
festgelegt.
dRp,1/2
daLL=
1
2Z
(
bLLRR ±√bLLLL (−aRR bLLRR + aLL bRRRR)
X
)
(A.1a)
dRp,1/2
daRR=
1
2Z
(
−bLLLL ∓√bLLLL (−aRR bLLLL + aLL bLLRR)
X
)
(A.1b)
dRp,1/2
dbLLLL=
1
2Z
(
−aRR ± (a2RR + 4 bRRRR)
√bLLLL
2X± X
2√bLLLL
)
+
+1
2Z2
(
bRRRR (aRR bLLLL − aLL bLLRR ∓√
bLLLLX))
(A.1c)
dRp,1/2
dbRRRR= ± 1
4X Z(a2
LL + 4 bLLLL)√
bLLLL +
+1
2Z2
(
bLLLL (aRR bLLLL − aLL bLLRR ∓√
bLLLLX))
(A.1d)
dRp,1/2
dbLLRR=
1
2Z
(
aLL ∓ (aLL aRR + 4 bLLRR)√bLLLL
X
)
−
− 1
Z2
(
bLLRR (aRR bLLLL − aLL bLLRR ∓√
bLLLLX))
(A.1e)
dRp,1/2
dbLRLR= 0 (A.1f)
Page 116
Koeffizientenfunktionen der Matrix K 111
dRp,3/4
daLL=
1
2Z
(
−bRRRR ±√bRRRR (−aRR bLLRR + aLL bRRRR)
X
)
(A.2a)
dRp,3/4
daRR=
1
2Z
(
bLLRR ∓√bRRRR (−aRR bLLLL + aLL bLLRR)
X
)
(A.2b)
dRp,3/4
dbLLLL= ± 1
4X Z(a2
RR + 4 bRRRR)√
bRRRR −
− 1
2Z2
(
bRRRR (aRR bLLRR − aLL bRRRR ±√
bRRRR X))
(A.2c)
dRp,3/4
dbRRRR=
1
2Z
(
−aLL ± (a2LL + 4 bLLLL)
√bRRRR
2X± X
2√bRRRR
)
−
− 1
2Z2
(
bLLLL (aRR bLLRR − aLL bRRRR ±√
bRRRR X))
(A.2d)
dRp,3/4
dbLLRR=
1
2Z
(
aRR ∓ (aLL aRR + 4 bLLRR)√bRRRR
X
)
+
+1
Z2
(
bLLRR (aRR bLLRR − aLL bRRRR ±√
bRRRR X))
(A.2e)
dRp,3/4
dbLRLR= 0 (A.2f)
dRp,5
daLL= 0 (A.3a)
dRp,5
daRR= 0 (A.3b)
dRp,5
dbLLLL= 0 (A.3c)
dRp,5
dbRRRR=bLLRR
b2RRRR
(A.3d)
dRp,5
dbLLRR= − 1
bRRRR
(A.3e)
dRp,5
dbLRLR= 0 (A.3f)
dRp,6
daLL= −aRR bLLRR − aLL bRRRR
4X√Z bLRLR
(A.4a)
dRp,6
daRR=aRR bLLLL − aLL bLLRR
4X√Z bLRLR
(A.4b)
dRp,6
dbLLLL= −(aRR bLLRR − aLL bRRRR)2
8X√Z3 bLRLR
(A.4c)
dRp,6
dbRRRR= −(aRR bLLLL − aLL bLLRR)2
8X√Z3 bLRLR
(A.4d)
dRp,6
dbLLRR=
(aRR bLLLL − aLL bLLRR) (aRR bLLRR − aLL bRRRR)
4X√Z3 bLRLR
(A.4e)
dRp,6
dbLRLR= − X
8√
Z b3LRLR
(A.4f)
Page 117
AnhangBKoeffizientenfunktionen der Matrix L
L ist die Matrix der Ableitungen der sechs Komponenten des Vektors R∗ gemaß Gleichung
(4.167) nach den sechs Komponenten des Vektors der primaren Variablen α gemaß Gleichung
(4.135). Es ist somit eine 6×6-Matrix, die folgendermaßen definiert ist:
L =∂R∗
n+1
∂αn+1
:=
L1 0 0 0 0 0
0 L2 0 0 0 0
0 0 L3 0 0 0
0 0 0 L4 0 0
0 0 0 0 L5 0
L7 L8 0 0 0 L6
(B.1)
Die verschiedenen Koeffizienten L1 bis L8 erhalt man aus (4.167) zu
L1 = −kt,⊥R∗1 (B.2a)
L2 = +kc,⊥ Y1,⊥ e−kc,⊥ αc,⊥ +
∂qR∂αc,⊥
(B.2b)
L3 = −kt,‖R∗3 (B.2c)
L4 = −kc,‖ Y1,‖ e−kc,‖ αc,⊥ +
∂qL∂αc,‖
(B.2d)
L5 = −kt,⊥R∗5 (B.2e)
L6 = −kshrR∗
1 +R∗2
2
[1 + tan(φ∞ + (φ0 − φ∞) e−kshr αshr)2
]·
·(φ0 − φ∞) e−kshr αshr (B.2f)
L7 = +L1
2tan(φ∞ + (φ0 − φ∞) e−kshr αshr) (B.2g)
L8 = −L2
2tan(φ∞ + (φ0 − φ∞) e−kshr αshr) (B.2h)
Page 118
Koeffizientenfunktionen der Matrix L 113
Die Koeffizienten ∂qR/∂αc,⊥ und ∂qL/∂αc,‖, die aus der in Abschnitt 2.4 beschriebenen Kom-
paktion herruhren, ergeben sich durch Ableitung der Gleichungen (4.146) und (4.158) nach
αc,⊥ bzw. αc,‖ zu
∂qR∂αc,⊥
= HR,d〈αc,⊥ − αR,d〉 (2αR,∞ − αc,⊥ − αR,d)
(αR,∞ − αc,⊥)2(B.3)
∂qL∂αc,‖
= HL,d
〈αc,‖ − αL,d〉 (2αL,∞ − αc,‖ − αL,d)
(αL,∞ − αc,‖)2(B.4)
Abbildung B.1 veranschaulicht die Funktionen |x| und 〈x〉 und deren Ableitungen nach x.
1 2 3 4 x−1−2−3−4 0
4
1 2 3 4 x−1−2−3−4 0
1
1
1
−1
00.5
1
−1
y (x)
y’ (x)
y=|x|
y’=d|x|dx
=sign x
y’=d〈x〉dx
=1 + signx
2
y=〈x〉 = 12 (x + |x|)
Abbildung B.1: Darstellung der Funktionen y=|x| und y=〈x〉
Page 119
AnhangCParameterstudien fur verschiedene
Evolutionsgesetze
Im folgenden Anhang wird wechselweise ausschließlich eine der Variablen α variiert und
der dadurch erzielte Einfluss auf die charakteristischen Festigkeiten und die Parameter der
Fließbedingung studiert. Alle restlichen Komponenten von α sind null gesetzt.
Die Studie basiert auf den Parameterwerten p1 gemaß (4.134) und den in Tabelle 4.5 zusam-
mengefassten Material-, Verfestigungs- und Entfestigungsparametern. Als charakteristische
Lange wurde `c = 5 mm angenommen.
Da die Komponenten αt,⊥ gemaß (4.143) und αref gemaß (4.161) den analogen Identifikatio-
nen entsprechen, werden fur den Fall der Vorgabe der Zugfestigkeit in Radialrichtung, diese
Komponenten gleichgesetzt. Fur alle Parameterstudien wird außerdem die Evolution der
Schubspannung gleichzeitig mit der jeweiligen Zug- oder Druckfestigkeit berucksichtigt.
Folgende Diagramme werden fur die verschiedenen Parameterstudien erstellt:
1. Entwicklung der Festigkeiten parallel bzw. normal zur Faserrichtung, wobei einaxiale
Festigkeiten und die entsprechenden Extrema betrachtet werden. Da die Bestimmungs-
gleichungen der Extremwerte des Ellipsoids zur Berechnung des Gleichungssystems
nach Gleichung (4.171) herangezogen wurden, bleiben jene Verlaufe der Extrema, die
den Vorgaben nach Abschnitt 4.2.6 entsprechen, konstant.
2. Veranderung der einzelnen Parameter des Ellipsoids, bezogen auf deren ursprunglichen
Wert, aufgetragen uber den jeweiligen Wertebereich der untersuchten Laufvariablen.
3. Gegenuberstellung des Ellipsoids fur den jeweiligen Maximalwert der untersuchten
Laufvariablen und des initialen Zustandes im orthotropen Spannungsraum.
Eine Diskussion der Verlaufe der verschiedenen Diagramme und Abbildungen ist dem jewei-
ligen Abschnitt beigefugt.
Page 120
Parameterstudien C.1: Zugfestigkeit in Radialrichtung 115
C.1 Vorgabe der Zugfestigkeit in Radialrichtung βt,⊥
0 0.01 0.02 0.03 0.04 0.053.9
4
4.1
4.2(a) Druck − quer zur Faserrichtung
β c,⊥
0 0.01 0.02 0.03 0.04 0.050
2
4
6(b) Zug − quer zur Faserrichtung
β t,⊥
0 0.01 0.02 0.03 0.04 0.050
20
40
60(c) Druck − in Faserrichtung
β c,
0 0.01 0.02 0.03 0.04 0.0520
40
60
80(d) Zug − in Faserrichtung
β t,
0 0.01 0.02 0.03 0.04 0.05−10
−5
0(e) Schub − negativ
−β sh
r
0 0.01 0.02 0.03 0.04 0.050
5
10(f) Schub − positiv
β shr
Abbildung C.1: Einaxiale Festigkeiten (volle Linien) und Extremwerte (strichlierte Linien)
bei Vorgabe von max βt,⊥, aufgetragen uber den Wertebereich der Laufva-
riablen αt,⊥
Bei Vorgabe der Zugfestigkeit max βt,⊥ wird αt,⊥ = αref = αshr ∈ [0, 0.05] betrachtet. Alle
restlichen Komponenten von α sind auf null gesetzt. Da das Maximum der Zugfestigkeit
quer zur Faser vorgegeben wird, entspricht der Graph des entsprechenden Evolutionsgesetzes
der Abbildung C.1 (b).
In Abbildung C.1 (c) erreicht die einaxiale Druckfestigkeit in Faserrichtung bei αt,⊥ ≈ 0.008
ein Maximum. Dadurch weist der Verlauf einen Tendenzwechsel auf. Neben der Zugfestig-
keit in Radialrichtung nehmen die einaxialen Festigkeiten parallel zur Faserrichtung gemaß
Abbildung C.1 (c) und (d) stark ab. Da in der Evolutionsgleichung fur die Schubspannung
die betrachtete Zugfestigkeit vorkommt und diese durch die Entfestigung und bei hinreichend
großem α den Wert null annimmt, nimmt auch die Schubspannung gemaß Abbildung C.1 (f)
einen kleinen Wert an.
Durch diesen Sachverhalt ist die Reduktion des Ellipsoids auf die in Abbildung C.3 darge-
stellte Flache begrundet.
Page 121
Parameterstudien C.1: Zugfestigkeit in Radialrichtung 116
0 0.01 0.02 0.03 0.04 0.050
5
10
15
αt,⊥
(a)
a LL/a
LL0
0 0.01 0.02 0.03 0.04 0.05−400
−200
0
200
αt,⊥
(b)
a RR
/aR
R0
0 0.01 0.02 0.03 0.04 0.050
5
10
15
αt,⊥
(c)
b LLLL
/bLL
LL0
0 0.01 0.02 0.03 0.04 0.050
20
40
60
αt,⊥
(d)
b RR
RR
/bR
RR
R0
0 0.01 0.02 0.03 0.04 0.050.9
1
1.1
1.2
1.3
αt,⊥
(e)
b LLR
R/b
LLR
R0
0 0.01 0.02 0.03 0.04 0.050
50
100
150
200
αt,⊥
(d)
b LRLR
/bLR
LR0
Abbildung C.2: Parameter des Ellipsoids bei Vorgabe von max βt,⊥
Abbildung C.3: Veranderung des Ellipsoids bei αt,⊥ = αref = αshr = 0.05 im Vergleich zum
initialen Zustand (transparent)
Page 122
Parameterstudien C.2: Druckfestigkeit in Radialrichtung 117
C.2 Vorgabe der Druckfestigkeit in Radialrichtung βc,⊥
0 0.1 0.2 0.3 0.43
4
5
6
7(a) Druck − quer zur Faserrichtung
β c,⊥
0 0.1 0.2 0.3 0.44.55
4.555
4.56
4.565(b) Zug − quer zur Faserrichtung
β t,⊥
0 0.1 0.2 0.3 0.449.6
49.8
50
50.2
50.4(c) Druck − in Faserrichtung
β c,
0 0.1 0.2 0.3 0.462
63
64
65
66(d) Zug − in Faserrichtung
β t,
0 0.1 0.2 0.3 0.4−10
−8
−6
−4
−2(e) Schub − negativ
−β sh
r
0 0.1 0.2 0.3 0.42
4
6
8
10(f) Schub − positiv
β shr
Abbildung C.4: Einaxiale Festigkeiten (volle Linien) und Extremwerte (strichlierte Linien)
bei Vorgabe von max βc,⊥, aufgetragen uber den Wertebereich der Laufva-
riablen αc,⊥
Bei Vorgabe der Druckfestigkeit max βc,⊥ wird αc,⊥ = αref =∈ [0, 0.40] betrachtet. Alle
restlichen Komponenten von α sind auf null gesetzt. Da das Maximum der Druckfestigkeit
quer zur Faser vorgegeben wird, entspricht der Graph des entsprechenden Evolutionsgesetzes
der Abbildung C.4 (a).
In Abbildung C.4 (c) erreicht die einaxiale Druckfestigkeit in Faserrichtung bei αc,⊥ ≈ 0.04
ein Maximum. Dadurch weist der Verlauf einen Tendenzwechsel auf.
Ein Krummungswechsel ist durch das zweiteilige Evolutionsgesetz der Druckfestigkeit in Ra-
dialrichtung gemaß C.4 (a) vorgegeben. Dieses Evolutionsgesetz betrifft alle sechs Parameter
gemaß Abbildung C.5. Neben jenen funf Parametern, die die Ellipse in der σL-σR-Ebene de-
finieren, sind auch der Parameter bLRLR sowie die Schubspannung betroffen.
Die Gestalt der Fließflache im orthotropen Spannungsraum verandert sich hauptsachlich
durch Abnahme der Dicke in Richtung der Schubspannung.
Page 123
Parameterstudien C.2: Druckfestigkeit in Radialrichtung 118
0 0.1 0.2 0.3 0.40.85
0.9
0.95
1
(a)
a LL/a
LL0
αc,⊥
0 0.1 0.2 0.3 0.4−3
−2
−1
0
1
(b)a
RR
/aR
R0
αc,⊥
0 0.1 0.2 0.3 0.4
1
1.05
(c)b
LLLL
/bLL
LL0
αc,⊥
0 0.1 0.2 0.3 0.40.4
0.6
0.8
1
(d)
b RR
RR
/bR
RR
R0
αc,⊥
0 0.1 0.2 0.3 0.40.4
0.6
0.8
1
(e)
b LLR
R/b
LLR
R0
αc,⊥
0 0.1 0.2 0.3 0.40
5
10
15
αc,⊥
(f)
b LRLR
/bLR
LR0
Abbildung C.5: Parameter des Ellipsoids bei Vorgabe von max βc,⊥
Abbildung C.6: Veranderung des Ellipsoids bei αc,⊥ = αshr = 0.40 im Vergleich zum initialen
Zustand (transparent)
Page 124
Parameterstudien C.3: Zugfestigkeit in Langsrichtung 119
C.3 Vorgabe der Zugfestigkeit in Langsrichtung βt,‖
0 0.01 0.02 0.03 0.04 0.050
2
4
6(a) Druck − quer zur Faserrichtung
β c,⊥
0 0.01 0.02 0.03 0.04 0.050
2
4
6(b) Zug − quer zur Faserrichtung
β t,⊥
0 0.01 0.02 0.03 0.04 0.0549.6
49.8
50
50.2
50.4(c) Druck − in Faserrichtung
β c,
0 0.01 0.02 0.03 0.04 0.050
20
40
60
80(d) Zug − in Faserrichtung
β t,
0 0.01 0.02 0.03 0.04 0.05−10
−5
0(e) Schub − negativ
−β sh
r
0 0.01 0.02 0.03 0.04 0.050
5
10(f) Schub − positiv
β shr
Abbildung C.7: Einaxiale Festigkeiten (volle Linien) und Extremwerte (strichlierte Linien)
bei Vorgabe von max βt,‖, aufgetragen uber den Wertebereich der Laufvaria-
blen αt,‖
Bei Vorgabe der Zugfestigkeit max βt,‖ wird αt,‖ = αref =∈ [0, 0.05] betrachtet. Alle rest-
lichen Komponenten von α sind auf null gesetzt. Da das Maximum der Zugfestigkeit in
Faserrichtung vorgegeben wird, entspricht der Graph des entsprechenden Evolutionsgesetzes
der Abbildung C.7 (d).
In Abbildung C.7 (a) erreicht die einaxiale Druckfestigkeit quer zur Faser bei αt,‖ ≈ 0.006
ein Maximum. Dadurch weist der Verlauf einen Tendenzwechsel auf. Durch die Abnahme
der Zugfestigkeit in Langsrichtung reduzieren sich, mit Ausnahme der Druckfestigkeit in
Faserrichtung gemaß Abbildung C.7 (c), alle einaxialen Festigkeiten.
Bei Reduktion der Zugfestigkeit in Faserrichtung verandern sich die Parameter des Ellipsoids
gemaß Abbildung C.8 sehr stark. Der Parameter aLL ist durch die betragsmaßig großte
Veranderung sowie einen Vorzeichenwechsel charakterisiert.
Die modifizierte Fließflache im orthotropen Spannungsraum ist durch eine starke Stauchung
in Richtung von σL charakterisiert.
Page 125
Parameterstudien C.3: Zugfestigkeit in Langsrichtung 120
0 0.01 0.02 0.03 0.04 0.05−15
−10
−5
0
5x 10
4
αt,
(a)
a LL/a
LL0
0 0.01 0.02 0.03 0.04 0.050
500
1000
1500
2000
αt,
(b)
a RR
/aR
R0
0 0.01 0.02 0.03 0.04 0.050
2
4
6x 10
4
αt,
(c)
b LLLL
/bLL
LL0
0 0.01 0.02 0.03 0.04 0.050
2000
4000
6000
8000
αt,
(d)
b RR
RR
/bR
RR
R0
0 0.01 0.02 0.03 0.04 0.050
2000
4000
6000
8000
αt,
(e)
b LLR
R/b
LLR
R0
0 0.01 0.02 0.03 0.04 0.050
1
2
3x 10
4
αt,
(f)
b LRLR
/bLR
LR0
Abbildung C.8: Parameter des Ellipsoids bei Vorgabe von max βt,‖
Abbildung C.9: Veranderung des Ellipsoids bei αt,‖ = αshr = 0.05 im Vergleich zum initialen
Zustand (transparent)
Page 126
Parameterstudien C.4: Druckfestigkeit in Langsrichtung 121
C.4 Vorgabe der Druckfestigkeit in Langsrichtung βc,‖
0 0.2 0.4 0.63.8
3.9
4
4.1
4.2(a) Druck − quer zur Faserrichtung
β c,⊥
0 0.2 0.4 0.64.5
4.55
4.6(b) Zug − quer zur Faserrichtung
β t,⊥
0 0.2 0.4 0.640
50
60
70(c) Druck − in Faserrichtung
β c,
0 0.2 0.4 0.664.95
65
65.05(d) Zug − in Faserrichtung
β t,
0 0.2 0.4 0.6−10
−5
0(e) Schub − negativ
−β sh
r
0 0.2 0.4 0.60
5
10(f) Schub − positiv
β shr
Abbildung C.10: Einaxiale Festigkeiten (volle Linien) und Extremwerte (strichlierte Linien)
bei Vorgabe von max βc,‖, aufgetragen uber den Wertebereich der Laufva-
riablen αc,‖
Bei Vorgabe der Druckfestigkeit max βc,‖ wird αc,‖ = αref =∈ [0, 0.70] betrachtet. Alle
restlichen Komponenten von α sind auf null gesetzt. Da das Maximum der Druckfestigkeit in
Faserrichtung vorgegeben wird, entspricht der Graph des entsprechenden Evolutionsgesetzes
der Abbildung C.10 (c).
In Abbildung C.10 (a) erreicht die einaxiale Zugfestigkeit quer zur Faser bei αt,‖ ≈ 0.65 ein
Maximum. Dadurch weist der Verlauf einen Tendenzwechsel auf.
Die modifizierte Fließflache im orthotropen Spannungsraum ist durch eine starke Streckung
in Richtung σL charakterisiert.
Page 127
Parameterstudien C.4: Druckfestigkeit in Langsrichtung 122
0 0.2 0.4 0.60
0.5
1
1.5
2
(a)
a LL/a
LL0
αc,
0 0.2 0.4 0.60.8
1
1.2
1.4
(b)
a RR
/aR
R0
αc,
0 0.2 0.4 0.60.6
0.8
1
1.2
1.4
(c)
b LLLL
/bLL
LL0
αc,
0 0.2 0.4 0.6
1
1.05
(d)
b RR
RR
/bR
RR
R0
αc,
0 0.2 0.4 0.6
1
1.05
(e)
b LLR
R/b
LLR
R0
αc,
0 0.2 0.4 0.60
5
10
15
20
αc,
(f)
b LRLR
/bLR
LR0
Abbildung C.11: Parameter des Ellipsoids bei Vorgabe von max βc,‖
Abbildung C.12: Veranderung des Ellipsoids bei αc,‖ = αshr = 0.70 im Vergleich zum initialen
Zustand (transparent)
Page 128
Tabellenverzeichnis
3.1 Ergebnisse der Ruckrechnung der elastischen Materialparameter . . . . . . . 21
3.2 Elastische Materialparameter im Vergleich . . . . . . . . . . . . . . . . . . . 29
4.1 Koordinatenverzeichnis der Punkte aus der Kurvendiskussion fur p0 . . . . . 57
4.2 Zusammenstellung charakteristischer Werte fur den Parametersatz p0 . . . . 58
4.3 Koordinatenverzeichnis der Punkte aus der Kurvendiskussion fur p1 . . . . . 60
4.4 Zusammenstellung charakteristischer Werte fur den Parametersatz p1 . . . . 60
4.5 Zusammenstellung der verwendeten Materialparameter . . . . . . . . . . . . 70
5.1 Beispiel zur Illustration der quadratischen Konvergenzrate . . . . . . . . . . 85
6.1 Materialparameter fur die Versuchssimulationen . . . . . . . . . . . . . . . . 88
6.2 Materialparameter fur alle Versuche der Konfiguration κ = 0:+1/ϕ = 0 . 95
6.3 Materialparameter fur alle Versuche der Konfiguration κ = 0:−1/ϕ = 0 . 96
6.4 Materialparameter fur alle Versuche der Konfiguration κ =+1:0/ϕ = 0 . . 97
6.5 Materialparameter fur alle Versuche der Konfiguration κ = −1:0/ϕ = 0 . 98
6.6 Dargestellte Versuchskonfigurationen . . . . . . . . . . . . . . . . . . . . . . 99
6.7 Unterschiede der vorgestellten Simulationsvarianten . . . . . . . . . . . . . . 105
Page 129
Abbildungsverzeichnis
2.1 (a) Lasteinleitungssystem, (b) Anordnung der Belastungsachsen . . . . . . . 4
2.2 (a) Probenentnahme aus einem Kernbrett, (b) Probekorperherstellung . . . . 5
2.3 (a) Abmessungen des Probekorpers, (b) Verschiebungsvorschrift . . . . . . . 6
2.4 (a) Probekorper, (b) Tragkonstruktion des optischen Messsystems . . . . . . 9
2.5 (a) In-plane-Verfahren, (b) Out-of-plane-Verfahren . . . . . . . . . . . . . . . 11
2.6 (a) Spaltbruch bzw. (b) Splitterbruch eines Probekorpers . . . . . . . . . . . 12
2.7 (a) Lineare Regression, (b) Verschiebung der σ-ε-Linien . . . . . . . . . . . . 16
2.8 Veranschaulichung der vier Versagensmechanismen . . . . . . . . . . . . . . . 17
3.1 Unterschied zwischen idealem und realem Verzerrungspfad . . . . . . . . . . 21
3.2 (a) Abschnitt eines Baumstamms, (b) Materialhauptrichtungen . . . . . . . 22
3.3 Benotigte Großen zur Bestimmung der elastischen Materialparameter . . . . 23
3.4 Verlauf der elastischen Materialparameter fur Versuch 098 . . . . . . . . . . 25
3.5 Verlauf der elastischen Materialparameter fur Versuch 098 aus [5] mit A=10 26
3.6 Verlauf der elastischen Materialparameter fur Versuch 098 aus [5] mit B=50 27
4.1 Geometrische Interpretation des Projektionsverfahrens . . . . . . . . . . . . 38
4.2 Ergebnisse des eindimensionalen Beispiels fur Verfestigung . . . . . . . . . . 42
4.3 Ergebnisse des eindimensionalen Beispiels fur Entfestigung . . . . . . . . . . 47
4.4 Festlegung von Punkten auf dem Hauptschnitt des Ellipsoids . . . . . . . . . 52
4.5 Zusammenhang zwischen φ und der Schubfestigkeit max τ 0LR . . . . . . . . . 56
4.6 Darstellung des Ellipsoids fur den initialen Parametersatz p0 . . . . . . . . . 57
4.7 Charakteristische Punkte fur initiale Parameterwerte p0 . . . . . . . . . . . . 58
4.8 Darstellung des Ellipsoids fur den modifizierten Parametersatz p1 . . . . . . 59
4.9 Charakteristische Punkte fur modifizierte Parameterwerte p1 . . . . . . . . . 60
4.10 Verlauf des Evolutionsgesetzes fur max βt,⊥ . . . . . . . . . . . . . . . . . . . 63
4.11 Verlauf des Evolutionsgesetzes fur max βc,⊥ . . . . . . . . . . . . . . . . . . . 64
4.12 Verlauf des Evolutionsgesetzes fur max βt,‖ . . . . . . . . . . . . . . . . . . . 65
4.13 Verlauf des Evolutionsgesetzes fur max βc,‖ . . . . . . . . . . . . . . . . . . . 66
4.14 Verlauf des Evolutionsgesetzes fur tanφ∗ . . . . . . . . . . . . . . . . . . . . 67
4.15 Zusammenhang zwischen φ und der Schubfestigkeit max τLR . . . . . . . . . 68
Page 130
ABBILDUNGSVERZEICHNIS 125
4.16 Verlauf des Evolutionsgesetzes fur max τLR . . . . . . . . . . . . . . . . . . . 68
4.17 Elasto-plastische Tangentenneigung bei Rissansatz . . . . . . . . . . . . . . . 71
4.18 Elemente zur Aktualisierung der Parameterwerte p . . . . . . . . . . . . . . 72
4.19 Veranderung des Hauptschnittes des Ellipsoids wahrend der Iteration . . . . 73
5.1 Geometrische Interpretation der konsistenten Tangente . . . . . . . . . . . . 87
6.1 Direkte Versuchssimulation von Versuch Nr. 090 mit κ = 0:+1/ϕ = 0 . . 90
6.2 Direkte Versuchssimulation von Versuch Nr. 248 mit κ = 0:−1/ϕ = 0 . . 91
6.3 Direkte Versuchssimulation von Versuch Nr. 144 mit κ =+1:0/ϕ = 0 . . 92
6.4 Direkte Versuchssimulation von Versuch Nr. 222 mit κ =−1:0/ϕ = 0 . . 93
6.5 Vergleichende Versuchssimulation von Konfiguration κ=0:+1/ϕ=0 . . . . 95
6.6 Vergleichende Versuchssimulation von Konfiguration κ = 0:−1/ϕ = 0 . . 96
6.7 Vergleichende Versuchssimulation von Konfiguration κ = +1:0/ϕ = 0 . . 97
6.8 Vergleichende Versuchssimulation von Konfiguration κ = −1:0/ϕ = 0 . . 98
6.9 Ergebnisse der biaxialen Versuche fur ϕ = 0 nach [5] . . . . . . . . . . . . . 100
6.10 Ergebnisse der Versuchssimulation fur ϕ = 0 . . . . . . . . . . . . . . . . . 100
6.11 Ergebnisse der biaxialen Versuche fur ϕ = 7.5 nach [5] . . . . . . . . . . . . 101
6.12 Ergebnisse der Versuchssimulation fur ϕ = 7.5 . . . . . . . . . . . . . . . . 101
6.13 Ergebnisse der biaxialen Versuche fur ϕ = 15 nach [5] . . . . . . . . . . . . 102
6.14 Ergebnisse der Versuchssimulation fur ϕ = 15 . . . . . . . . . . . . . . . . . 102
6.15 Ergebnisse der biaxialen Versuche fur ϕ = 30 nach [5] . . . . . . . . . . . . 103
6.16 Ergebnisse der Versuchssimulation fur ϕ = 30 . . . . . . . . . . . . . . . . . 103
6.17 Ergebnisse der biaxialen Versuche fur ϕ = 45 nach [5] . . . . . . . . . . . . 104
6.18 Ergebnisse der Versuchssimulation fur ϕ = 45 . . . . . . . . . . . . . . . . . 104
B.1 Darstellung der Funktionen y=|x| und y=〈x〉 . . . . . . . . . . . . . . . . . . 113
C.1 Einaxiale Festigkeiten und Extremwerte bei Vorgabe von max βt,⊥ . . . . . . 115
C.2 Parameter des Ellipsoids bei Vorgabe von max βt,⊥ . . . . . . . . . . . . . . 116
C.3 Veranderung des Ellipsoids bei αt,⊥ = αref = αshr = 0.05 . . . . . . . . . . . 116
C.4 Einaxiale Festigkeiten und Extremwerte bei Vorgabe von max βc,⊥ . . . . . . 117
C.5 Parameter des Ellipsoids bei Vorgabe von max βc,⊥ . . . . . . . . . . . . . . 118
C.6 Veranderung des Ellipsoids bei αc,⊥ = αshr = 0.40 . . . . . . . . . . . . . . . 118
C.7 Einaxiale Festigkeiten und Extremwerte bei Vorgabe von max βt,‖ . . . . . . 119
C.8 Parameter des Ellipsoids bei Vorgabe von max βt,‖ . . . . . . . . . . . . . . . 120
C.9 Veranderung des Ellipsoids bei αt,‖ = αshr = 0.05 . . . . . . . . . . . . . . . 120
C.10 Einaxiale Festigkeiten und Extremwerte bei Vorgabe von max βc,‖ . . . . . . 121
C.11 Parameter des Ellipsoids bei Vorgabe von max βc,‖ . . . . . . . . . . . . . . . 122
C.12 Veranderung des Ellipsoids bei αc,‖ = αshr = 0.70 . . . . . . . . . . . . . . . 122