Institut für Leistungselektronik und Elektrische Antriebe Prof. Dr.-Ing. J. Roth-Stielow Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12 Blatt 1 Universität Stuttgart 2.8 Umkehrstromrichter 2.8.1 Die Grundaufgabe des Umkehrstromrichters und ihre Lösung Gesteuerter Energieaustausch zwischen einem Wechsel- oder Drehstromsystem und einem Gleichstromsystem veränderlicher Polarität. Hauptanwendungsgebiet: Speisung von Antrieben einschließlich elektrischem Bremsen. Ein Umkehrstromrichter entsteht durch Kombination zweier Einfachstromrichter. Prinzipieller Aufbau am Beispiel einer sechspulsigen Brückenschaltung: Bild 1-2.8
Transcript
Institut für Leistungselektronik und Elektrische Antriebe
Prof. Dr.-Ing. J. Roth-Stielow
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 1
Universität Stuttgart
2.8 Umkehrstromrichter
2.8.1 Die Grundaufgabe des Umkehrstromrichters und ihre Lösung
Gesteuerter Energieaustausch zwischen einem Wechsel- oder Drehstromsystem und einem Gleichstromsystem veränderlicher Polarität.
Hauptanwendungsgebiet: Speisung von Antrieben einschließlich elektrischem Bremsen.
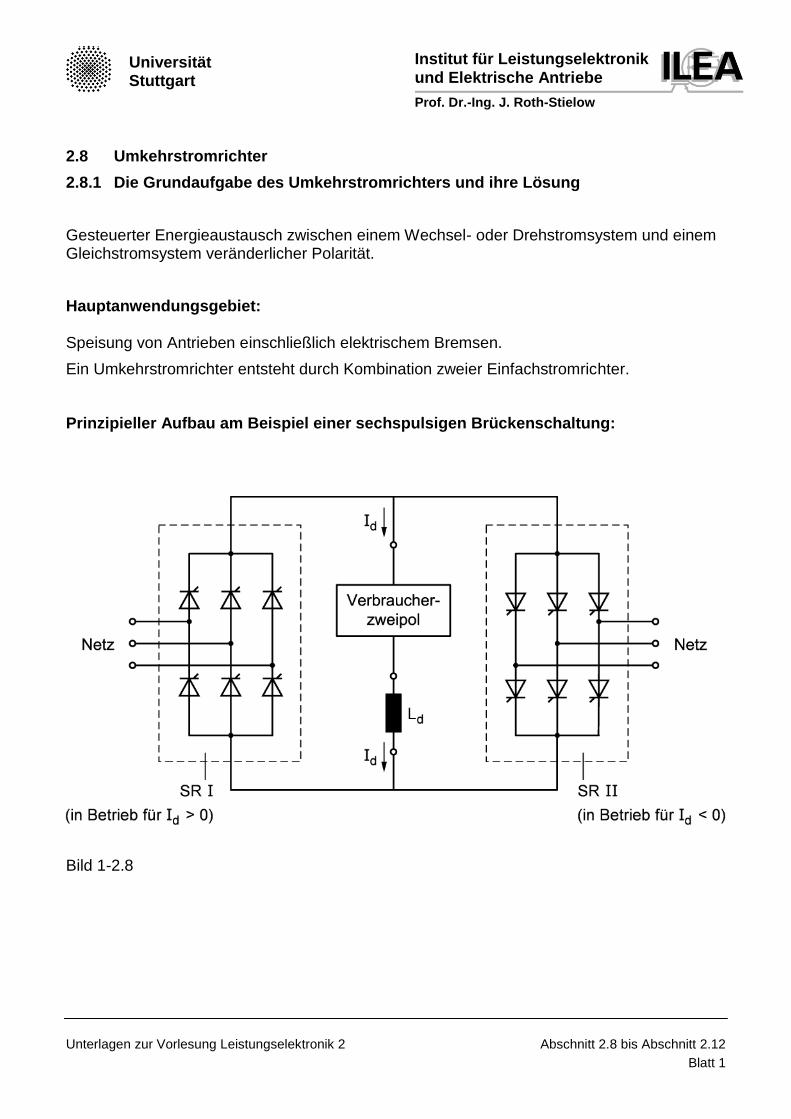
Ein Umkehrstromrichter entsteht durch Kombination zweier Einfachstromrichter.
Prinzipieller Aufbau am Beispiel einer sechspulsigen Brückenschaltung:
Bild 1-2.8
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 2
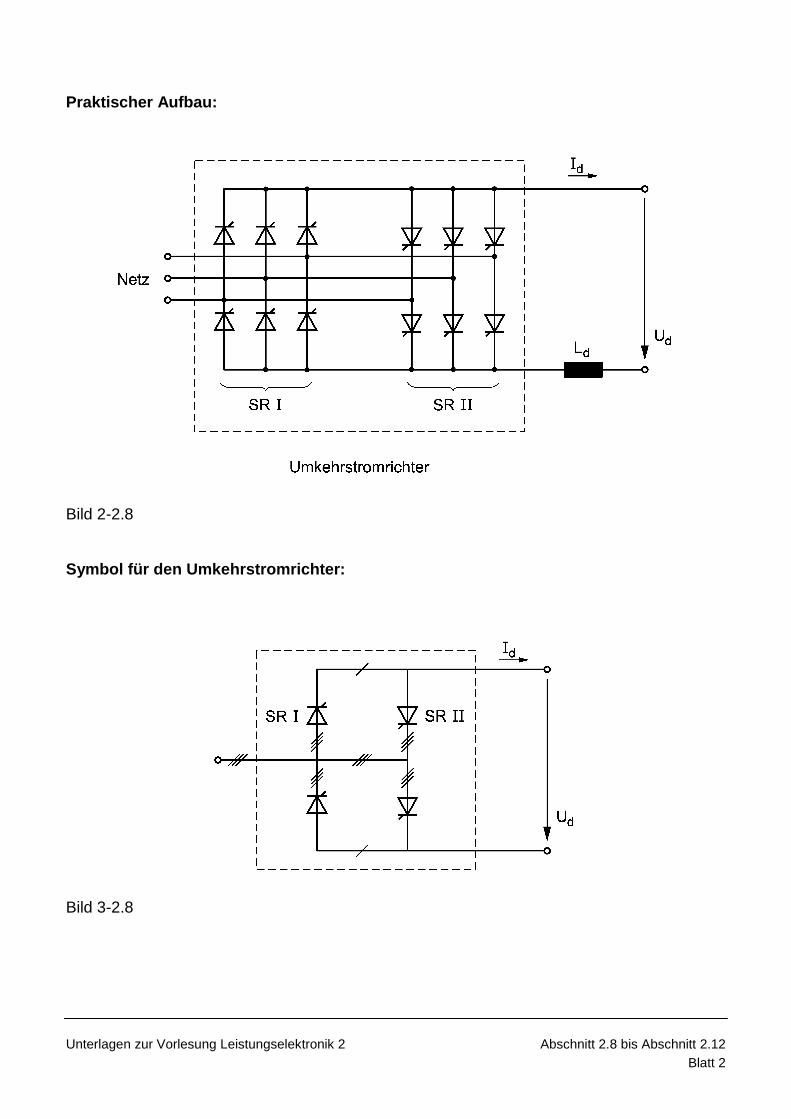
Praktischer Aufbau:
Bild 2-2.8
Symbol für den Umkehrstromrichter:
Bild 3-2.8
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 3
2.8.2 Umkehrstromrichter in Gleichstromsystemen
2.8.2.1 In Verbindung mit einer Gleichstrommaschine
Bild 4-2.8
Arbeitsbereich des Umkehrstromrichters und der Maschine:
Bild 5-2.8
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 4
2.8.2.2 In Verbindung mit einem Gleichspannungszwischenkreis
Bild 6-2.8
Arbeitsbereiche des Umkehrstromrichters:
Bild 7-2.8
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 5
2.8.3 Umkehrstromrichter in Wechsel- und Drehstromsystemen (Direktumrichter)
2.8.3.1 Wechselstromsysteme
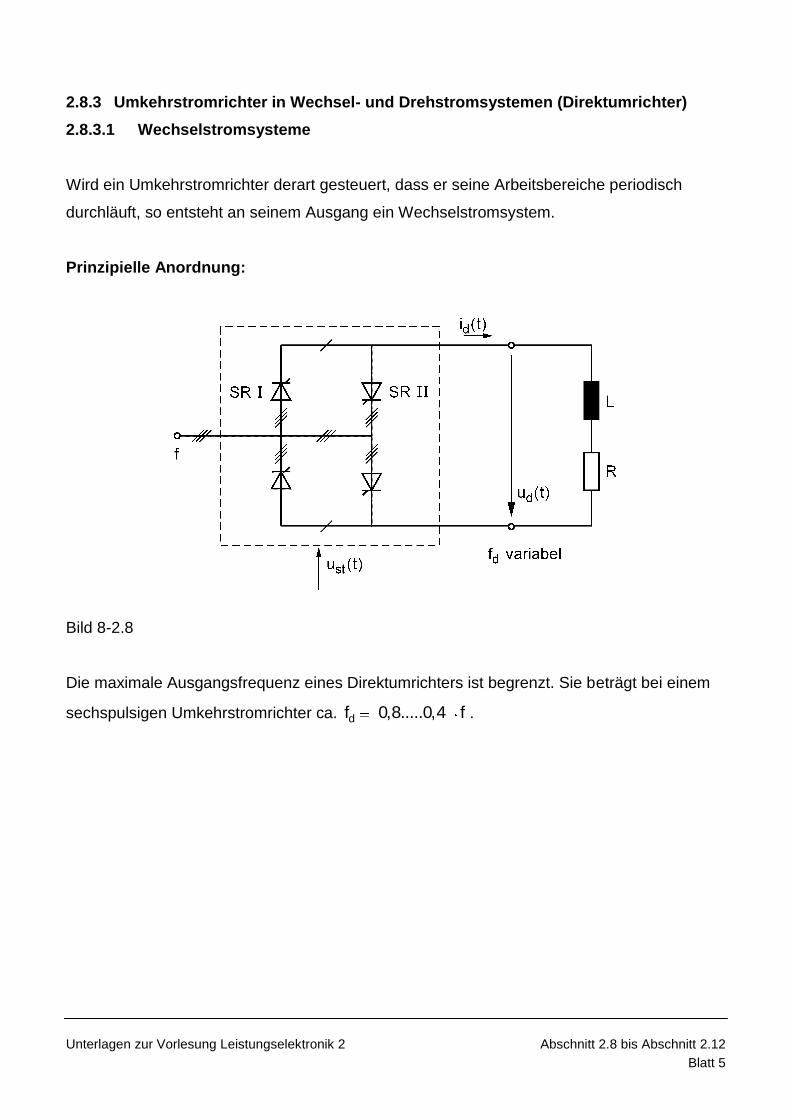
Wird ein Umkehrstromrichter derart gesteuert, dass er seine Arbeitsbereiche periodisch
durchläuft, so entsteht an seinem Ausgang ein Wechselstromsystem.
Prinzipielle Anordnung:
Bild 8-2.8
Die maximale Ausgangsfrequenz eines Direktumrichters ist begrenzt. Sie beträgt bei einem
sechspulsigen Umkehrstromrichter ca. df 0,8.....0,4 f .
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 6
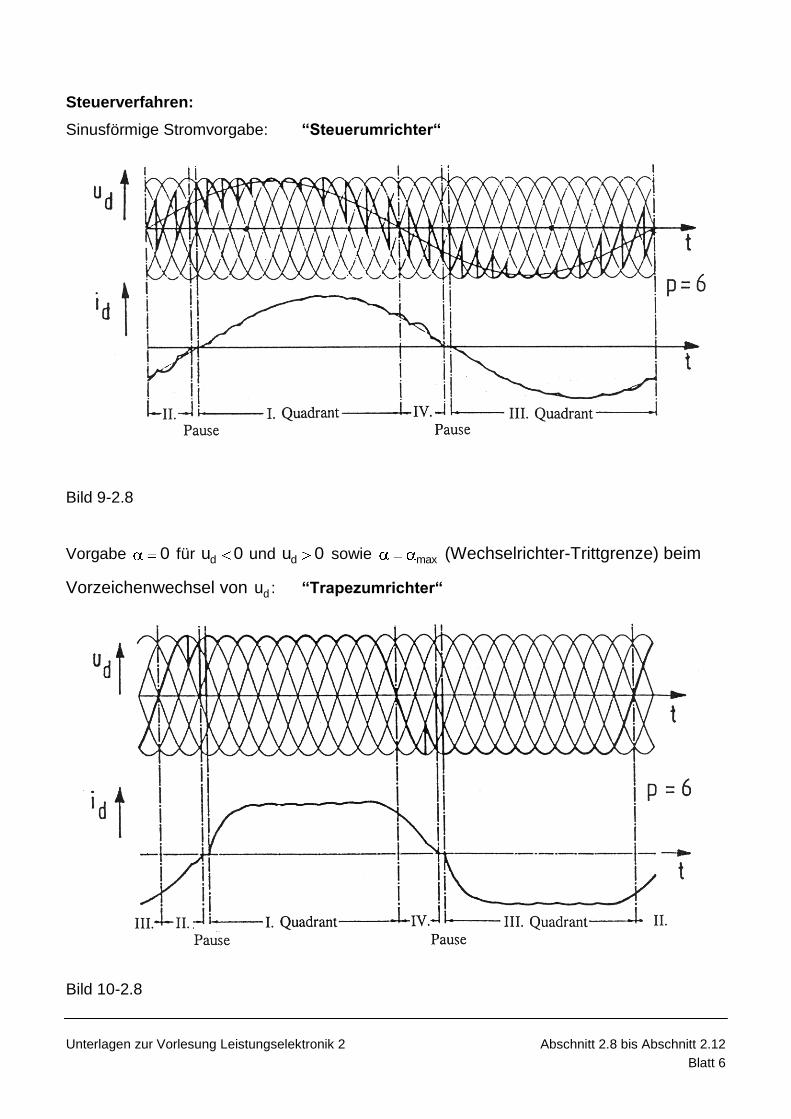
Steuerverfahren:
Sinusförmige Stromvorgabe: “Steuerumrichter“
Bild 9-2.8
Vorgabe 0 für du 0 und du 0 sowie max (Wechselrichter-Trittgrenze) beim
Vorzeichenwechsel von du : “Trapezumrichter“
Bild 10-2.8
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 7
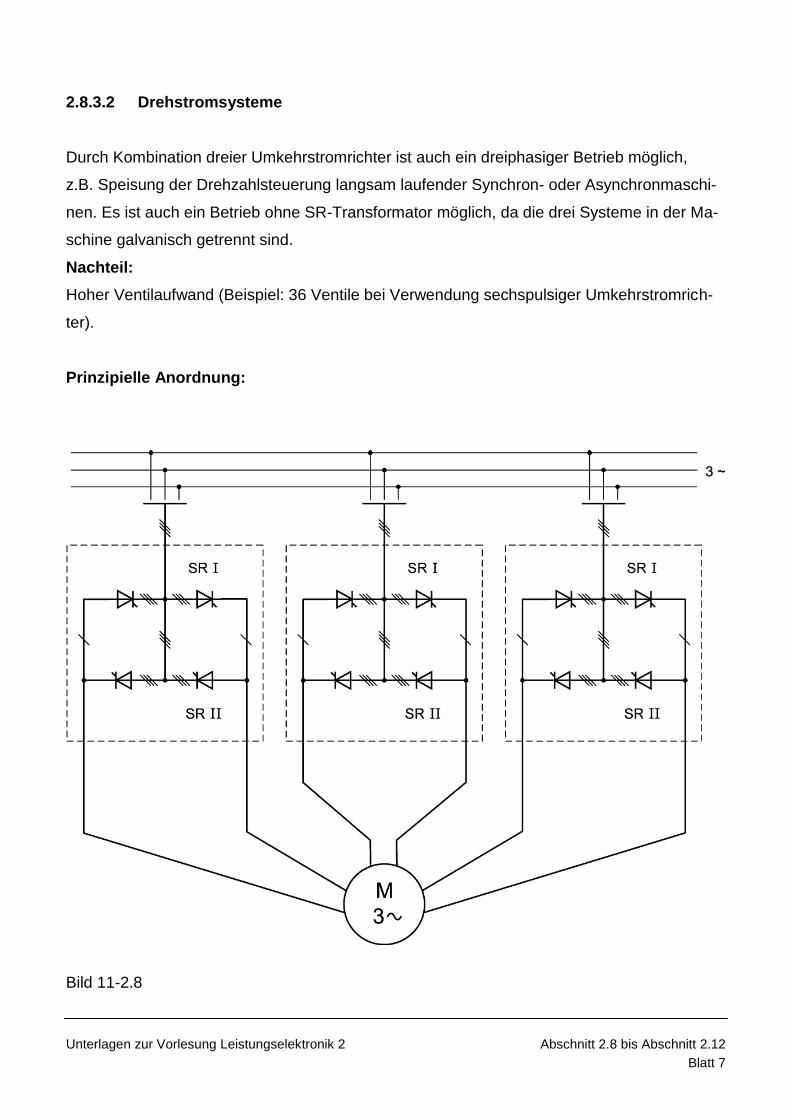
2.8.3.2 Drehstromsysteme
Durch Kombination dreier Umkehrstromrichter ist auch ein dreiphasiger Betrieb möglich,
z.B. Speisung der Drehzahlsteuerung langsam laufender Synchron- oder Asynchronmaschi-
nen. Es ist auch ein Betrieb ohne SR-Transformator möglich, da die drei Systeme in der Ma-
schine galvanisch getrennt sind.
Nachteil:
Hoher Ventilaufwand (Beispiel: 36 Ventile bei Verwendung sechspulsiger Umkehrstromrich-
ter).
Prinzipielle Anordnung:
Bild 11-2.8
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 8
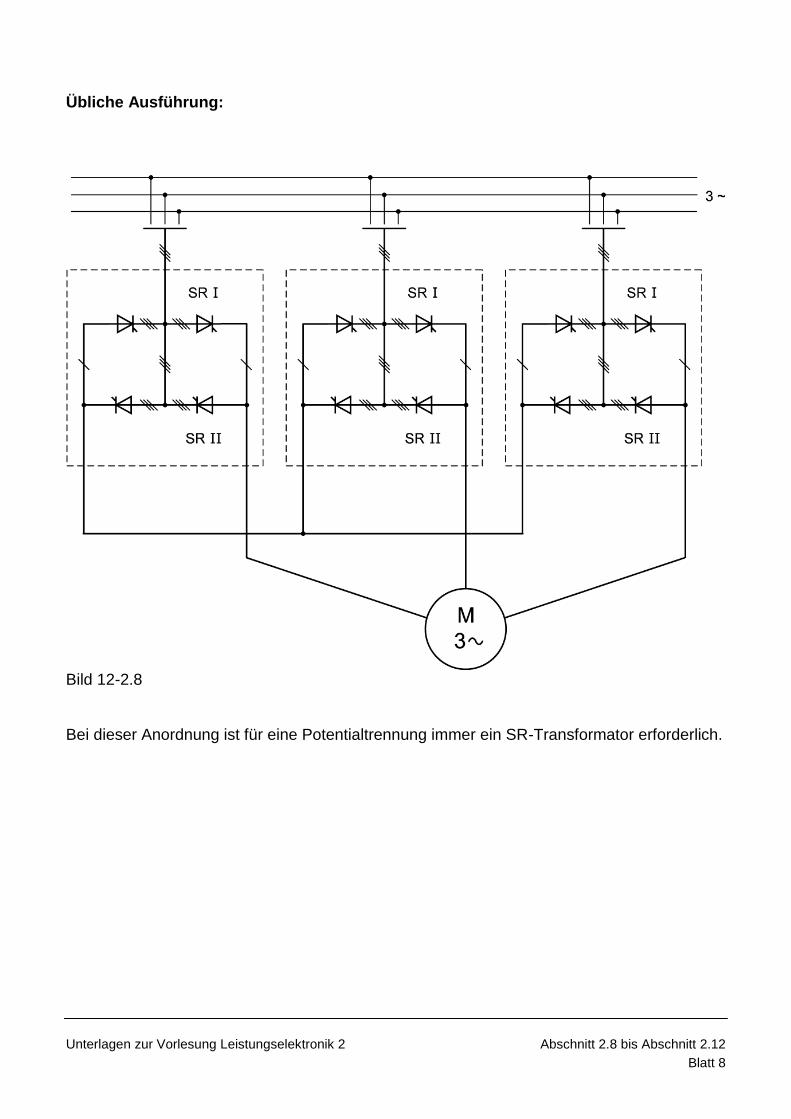
Übliche Ausführung:
Bild 12-2.8
Bei dieser Anordnung ist für eine Potentialtrennung immer ein SR-Transformator erforderlich.
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 9
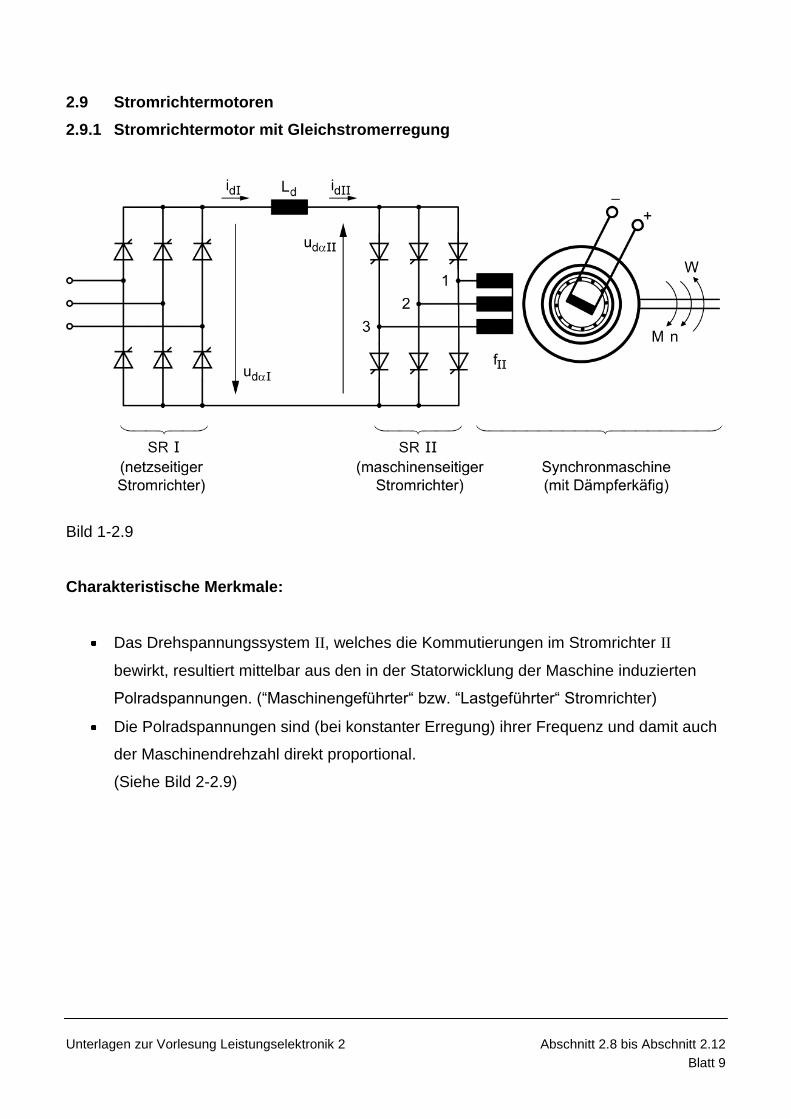
2.9 Stromrichtermotoren
2.9.1 Stromrichtermotor mit Gleichstromerregung
Bild 1-2.9
Charakteristische Merkmale:
Das Drehspannungssystem II, welches die Kommutierungen im Stromrichter II
bewirkt, resultiert mittelbar aus den in der Statorwicklung der Maschine induzierten
Polradspannungen. (“Maschinengeführter“ bzw. “Lastgeführter“ Stromrichter)
Die Polradspannungen sind (bei konstanter Erregung) ihrer Frequenz und damit auch
der Maschinendrehzahl direkt proportional.
(Siehe Bild 2-2.9)
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 10
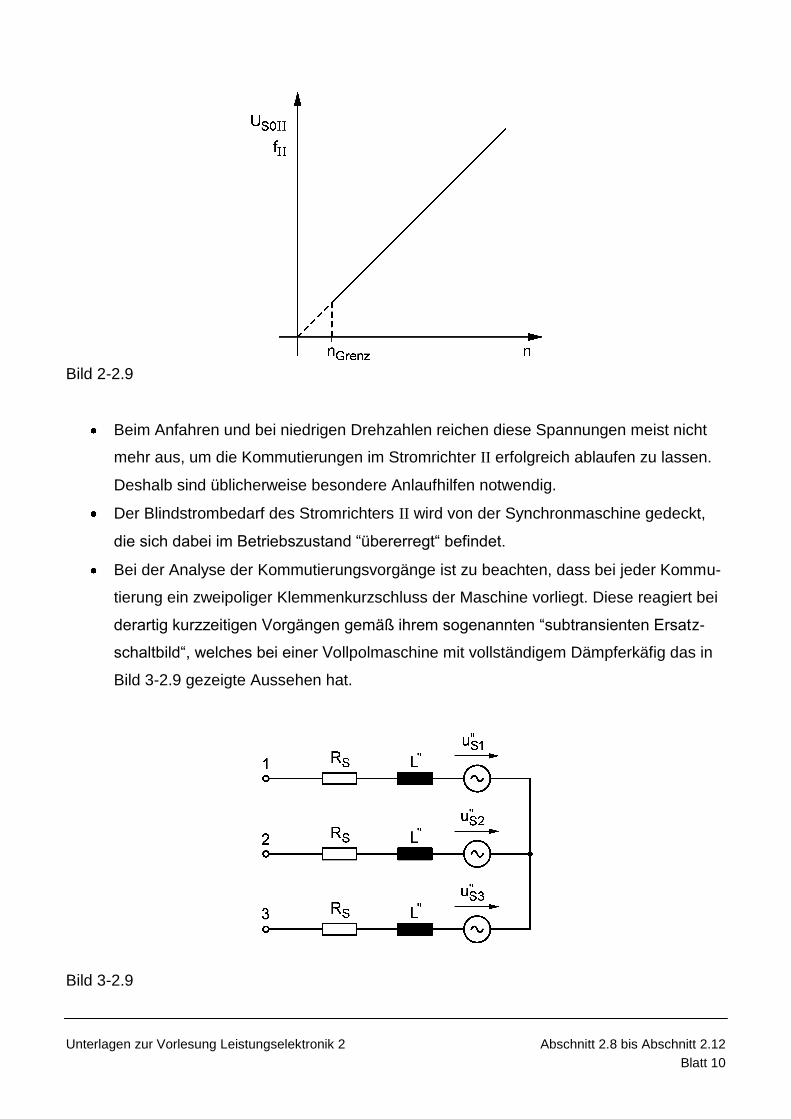
Bild 2-2.9
Beim Anfahren und bei niedrigen Drehzahlen reichen diese Spannungen meist nicht
mehr aus, um die Kommutierungen im Stromrichter II erfolgreich ablaufen zu lassen.
Deshalb sind üblicherweise besondere Anlaufhilfen notwendig.
Der Blindstrombedarf des Stromrichters II wird von der Synchronmaschine gedeckt,
die sich dabei im Betriebszustand “übererregt“ befindet.
Bei der Analyse der Kommutierungsvorgänge ist zu beachten, dass bei jeder Kommu-
tierung ein zweipoliger Klemmenkurzschluss der Maschine vorliegt. Diese reagiert bei
derartig kurzzeitigen Vorgängen gemäß ihrem sogenannten “subtransienten Ersatz-
schaltbild“, welches bei einer Vollpolmaschine mit vollständigem Dämpferkäfig das in
Bild 3-2.9 gezeigte Aussehen hat.
Bild 3-2.9
Unterlagen zur Vorlesung Leistungselektronik 2 Abschnitt 2.8 bis Abschnitt 2.12
Blatt 11
Die Kombination Stromrichter II und Synchronmaschine (“Stromrichtermotor“)
entspricht dem Prinzip einer “umgekehrten“ Gleichstrommaschine:
Die Gleichstromerregung ist vom Stator in den Rotor verlegt, die Ankerwicklung ist
vom Rotor in den Stator verlegt und der mechanische Kommutator ist durch den als
“elektronischer Kommutator“ fungierenden SR II ersetzt.
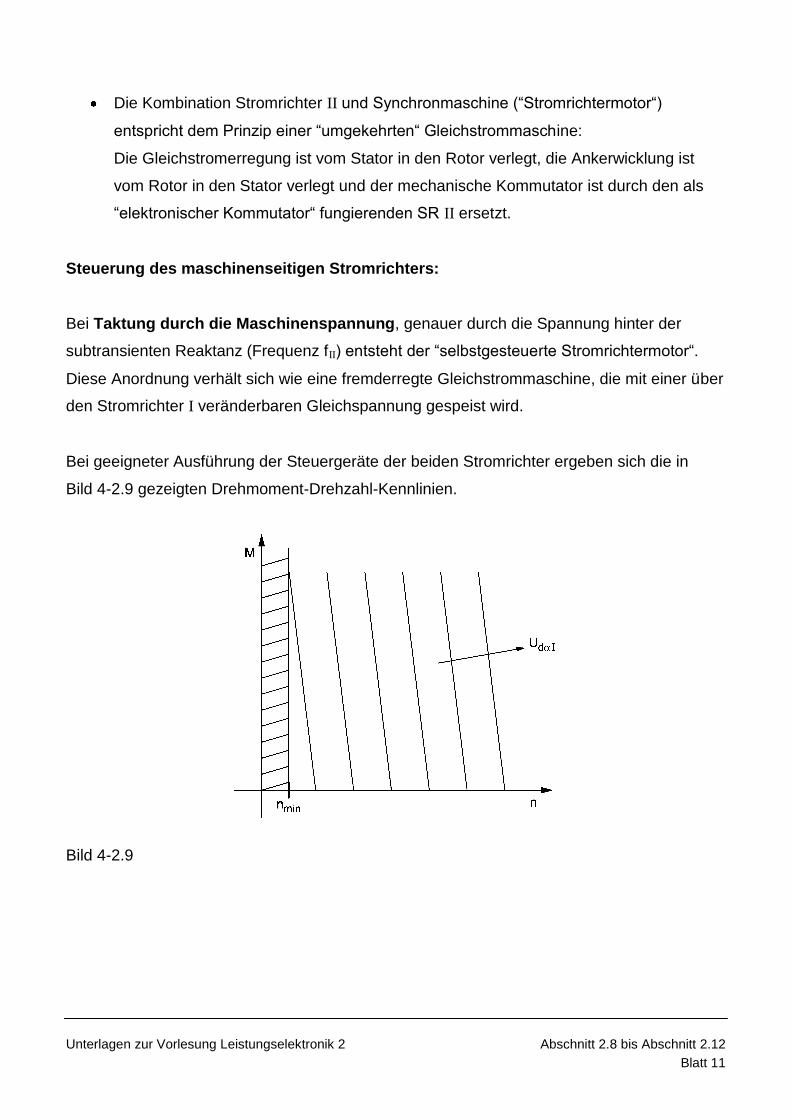
Steuerung des maschinenseitigen Stromrichters:
Bei Taktung durch die Maschinenspannung, genauer durch die Spannung hinter der
subtransienten Reaktanz (Frequenz fII) entsteht der “selbstgesteuerte Stromrichtermotor“.
Diese Anordnung verhält sich wie eine fremderregte Gleichstrommaschine, die mit einer über
den Stromrichter I veränderbaren Gleichspannung gespeist wird.
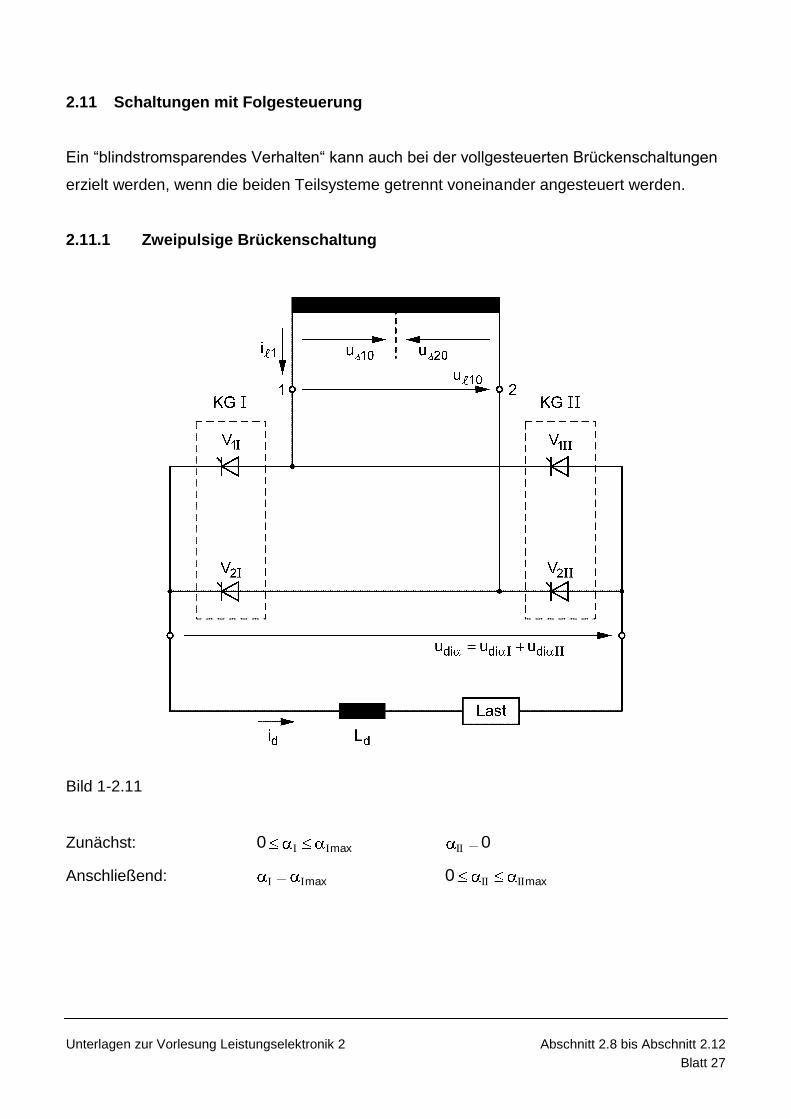
Bei geeigneter Ausführung der Steuergeräte der beiden Stromrichter ergeben sich die in