47
| Date post: | 18-Apr-2019 |
| Category: |
Documents |
| Upload: | dinhnguyet |
| View: | 223 times |
| Download: | 0 times |
Compressed Sensing und der Rekonstruktions-AlgorithmusNESTA
Abschlussvortrag
Claudia Nilles
TUM
25. März 2010
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 2 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 3 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 4 / 43
Dünnbesetztheit
Ein grundlegendes Prinzip für die Methode des Compressed Sensing ist dieForderung nach einer dünnbesetzten Darstellung des Signals.
De�nition (S-sparse)
Sei f ∈ Rn, Ψ = [ψ1, . . . , ψn] eine Orthonormalbasis des Rn und S ∈ N. Dannheiÿt f S-sparse bzgl. der Basis Ψ, falls f eine Linearkombination aus höchstens SBasisvektoren ist, d.h falls
f =n∑
i=1
xiψi bzw. kurz f = Ψx ,
wobei xi 6= 0 für höchstens S Koe�zienten.
`0-Norm: ‖x‖0
:=∑n
i=1 |x |0 = # Nichtnulleinträge von x , (wobei 00 := 0).
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 5 / 43
Abtastproblem
Formulierung des Abtastproblems als lineares Gleichungssystem:
Ψ ∈ Rn×n ONB des Rn, in der das Signal f S-sparse ist:
f = Ψx mit ‖x‖0≤ S .
Φ ∈ Rm×n, m < n Messmatrix mit Zeilen (ϕk) sodass
yk = 〈f , ϕk〉 , k = 1, ...,m bzw. y = Φf .
A := ΦΨ ∈ Rm×n.
Das Abtastproblem als unterbestimmtes lineares GleichungssystemRekonstruktion einer S-sparse Lösung x ∈ Rn mittels den m linearen Messungen,m < n,
y = Ax .
Eine S-sparse Lösung x0 heiÿt bestmöglich dünnbesetzt, falls
Ax0 = y und ‖x‖0> S ∀x 6= x0 mit Ax = y .
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 6 / 43
Abtastproblem
Formulierung des Abtastproblems als lineares Gleichungssystem:
Ψ ∈ Rn×n ONB des Rn, in der das Signal f S-sparse ist:
f = Ψx mit ‖x‖0≤ S .
Φ ∈ Rm×n, m < n Messmatrix mit Zeilen (ϕk) sodass
yk = 〈f , ϕk〉 , k = 1, ...,m bzw. y = Φf .
A := ΦΨ ∈ Rm×n.
Das Abtastproblem als unterbestimmtes lineares GleichungssystemRekonstruktion einer S-sparse Lösung x ∈ Rn mittels den m linearen Messungen,m < n,
y = Ax .
Eine S-sparse Lösung x0 heiÿt bestmöglich dünnbesetzt, falls
Ax0 = y und ‖x‖0> S ∀x 6= x0 mit Ax = y .
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 6 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 7 / 43
Spark
De�nition (spark)
Für A ∈ Rm×n de�niere spark(A) ∈ N als die Kardinalität der kleinstenUntermenge linear abhängiger Spaltenvektoren von A.
Satz (Unschärferelation)
Sei A ∈ Rm×n und x1, x2 ∈ Rn, x1 6= x2 mit Ax1 = Ax2. Dann gilt
‖x1‖0 + ‖x2‖0 ≥ spark(A).
Korollar (Eindeutigkeit mittels spark)
Sei A ∈ Rm×n, y ∈ Rm und x ∈ Rn mit
Ax = y und ‖x‖0<
12spark(A),
dann ist x die bestmöglich dünnbesetzte Lösung des linearen Gleichungssystems.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 8 / 43
Spark
De�nition (spark)
Für A ∈ Rm×n de�niere spark(A) ∈ N als die Kardinalität der kleinstenUntermenge linear abhängiger Spaltenvektoren von A.
Satz (Unschärferelation)
Sei A ∈ Rm×n und x1, x2 ∈ Rn, x1 6= x2 mit Ax1 = Ax2. Dann gilt
‖x1‖0 + ‖x2‖0 ≥ spark(A).
Korollar (Eindeutigkeit mittels spark)
Sei A ∈ Rm×n, y ∈ Rm und x ∈ Rn mit
Ax = y und ‖x‖0<
12spark(A),
dann ist x die bestmöglich dünnbesetzte Lösung des linearen Gleichungssystems.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 8 / 43
Spark
De�nition (spark)
Für A ∈ Rm×n de�niere spark(A) ∈ N als die Kardinalität der kleinstenUntermenge linear abhängiger Spaltenvektoren von A.
Satz (Unschärferelation)
Sei A ∈ Rm×n und x1, x2 ∈ Rn, x1 6= x2 mit Ax1 = Ax2. Dann gilt
‖x1‖0 + ‖x2‖0 ≥ spark(A).
Korollar (Eindeutigkeit mittels spark)
Sei A ∈ Rm×n, y ∈ Rm und x ∈ Rn mit
Ax = y und ‖x‖0<
12spark(A),
dann ist x die bestmöglich dünnbesetzte Lösung des linearen Gleichungssystems.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 8 / 43
Restricted Isometry Property
De�nition (Restricted Isometry Property (RIP))
Für S ∈ N de�niere die Isometrie-Konstante δS einer Matrix A ∈ Rm×n durch diekleinste Zahl, sodass
(1− δS) ‖x‖22≤ ‖Ax‖2
2≤ (1 + δS) ‖x‖2
2
für alle x ∈ Rn mit ‖x‖0≤ S gilt.
Ist δS < 1, dann erfüllt A die Restricted Isometry Property der Ordnung S .
Satz (Eindeutigkeit mittels RIP)
Sei A ∈ Rm×n und erfülle die RIP der Ordnung 2S mit Isometrie-Konstante δ2S .Sei y ∈ Rm und x ∈ Rn mit
y = Ax und ‖x‖0≤ S ,
dann ist x die bestmöglich dünnbesetzte Lösung des linearen Gleichungssystems.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 9 / 43
Restricted Isometry Property
De�nition (Restricted Isometry Property (RIP))
Für S ∈ N de�niere die Isometrie-Konstante δS einer Matrix A ∈ Rm×n durch diekleinste Zahl, sodass
(1− δS) ‖x‖22≤ ‖Ax‖2
2≤ (1 + δS) ‖x‖2
2
für alle x ∈ Rn mit ‖x‖0≤ S gilt.
Ist δS < 1, dann erfüllt A die Restricted Isometry Property der Ordnung S .
Satz (Eindeutigkeit mittels RIP)
Sei A ∈ Rm×n und erfülle die RIP der Ordnung 2S mit Isometrie-Konstante δ2S .Sei y ∈ Rm und x ∈ Rn mit
y = Ax und ‖x‖0≤ S ,
dann ist x die bestmöglich dünnbesetzte Lösung des linearen Gleichungssystems.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 9 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 10 / 43
Rekonstruktionsstrategien
Angenommen es existiert eine bestmöglich dünnbesetzte Lösung x0 desunterbestimmten linearen Gleichungssystems
y = Ax .
Die direkte Methode x0 zu ermitteln entspricht dem Lösen folgendemMinimierungsproblems:
Problem P0
minx∈Rn
‖x‖0
u.d.N. y = Ax .
Dies ist ein NP-schweres Problem.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 11 / 43
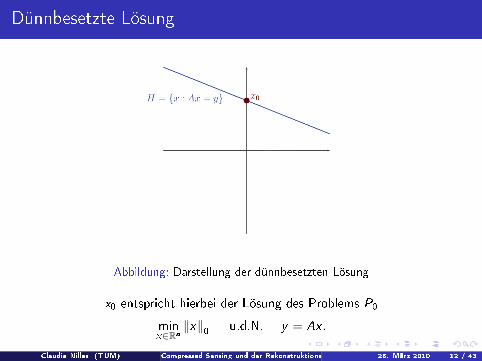
Dünnbesetzte Lösung
Abbildung: Darstellung der dünnbesetzten Lösung
x0 entspricht hierbei der Lösung des Problems P0
minx∈Rn
‖x‖0
u.d.N. y = Ax .
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 12 / 43
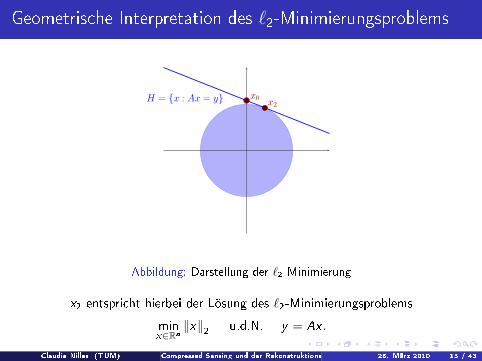
Geometrische Interpretation des `2-Minimierungsproblems
H = {x : Ax = y} x0x2
Abbildung: Darstellung der `2-Minimierung
x2 entspricht hierbei der Lösung des `2-Minimierungsproblems
minx∈Rn
‖x‖2
u.d.N. y = Ax .
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 13 / 43
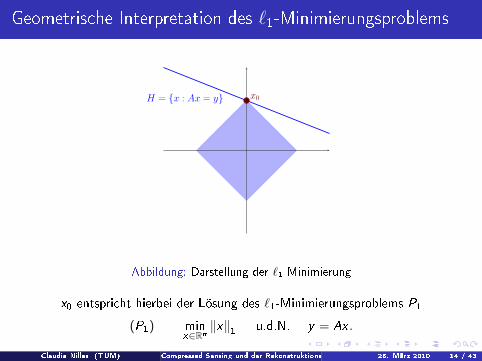
Geometrische Interpretation des `1-Minimierungsproblems
H = {x : Ax = y} x0
Abbildung: Darstellung der `1-Minimierung
x0 entspricht hierbei der Lösung des `1-Minimierungsproblems P1
(P1) minx∈Rn
‖x‖1
u.d.N. y = Ax .
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 14 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 15 / 43
Äquivalenz der Probleme P0 und P1
(P0) minx∈Rn
‖x‖0
u.d.N. y = Ax .
(P1) minx∈Rn
‖x‖1
u.d.N. y = Ax .
Äquivalenzsatz
Sei A ∈ Rm×n und erfülle die RIP der Ordnung 2S mit Isometrie-Konstante δ2S .Falls
δ2S <√2− 1
gilt, dann sind alle S-Sparse Lösungen des linearen Gleichungssystems y = Axgleich der Lösung des Problems P1. Somit ist x0 die Lösung des Problems P0genau dann, wenn x0 die Lösung des Problems P1 ist.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 16 / 43
Äquivalenz der Probleme P0 und P1
(P0) minx∈Rn
‖x‖0
u.d.N. y = Ax .
(P1) minx∈Rn
‖x‖1
u.d.N. y = Ax .
Äquivalenzsatz
Sei A ∈ Rm×n und erfülle die RIP der Ordnung 2S mit Isometrie-Konstante δ2S .Falls
δ2S <√2− 1
gilt, dann sind alle S-Sparse Lösungen des linearen Gleichungssystems y = Axgleich der Lösung des Problems P1. Somit ist x0 die Lösung des Problems P0genau dann, wenn x0 die Lösung des Problems P1 ist.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 16 / 43
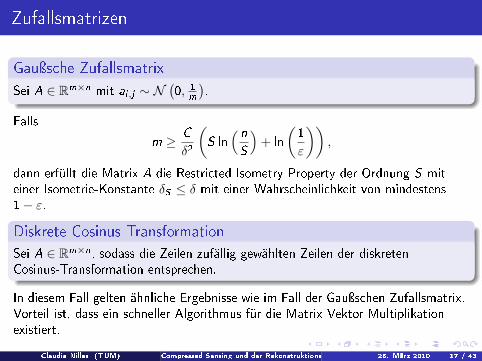
Zufallsmatrizen
Gauÿsche Zufallsmatrix
Sei A ∈ Rm×n mit ai,j ∼ N(0, 1
m
).
Falls
m ≥ C
δ2
(S ln
( n
S
)+ ln
(1ε
)),
dann erfüllt die Matrix A die Restricted Isometry Property der Ordnung S miteiner Isometrie-Konstante δS ≤ δ mit einer Wahrscheinlichkeit von mindestens1− ε.
Diskrete Cosinus-TransformationSei A ∈ Rm×n, sodass die Zeilen zufällig gewählten Zeilen der diskretenCosinus-Transformation entsprechen.
In diesem Fall gelten ähnliche Ergebnisse wie im Fall der Gauÿschen Zufallsmatrix.Vorteil ist, dass ein schneller Algorithmus für die Matrix-Vektor-Multiplikationexistiert.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 17 / 43
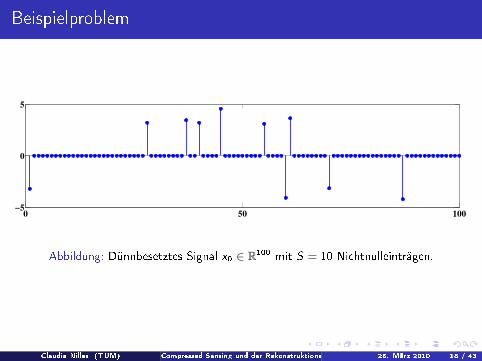
Beispielproblem
0 50 100−5
0
5
Abbildung: Dünnbesetztes Signal x0 ∈ R100 mit S = 10 Nichtnulleinträgen.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 18 / 43
Beispielproblem
0 50 100−5
0
5
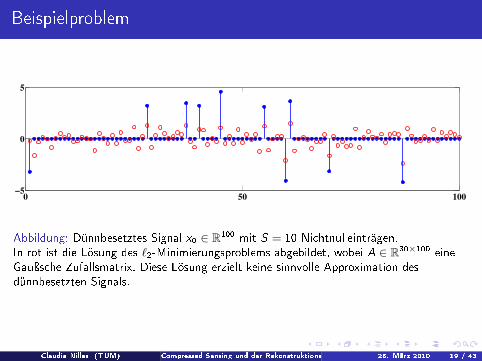
Abbildung: Dünnbesetztes Signal x0 ∈ R100 mit S = 10 Nichtnulleinträgen.
In rot ist die Lösung des `2-Minimierungsproblems abgebildet, wobei A ∈ R30×100 eine
Gauÿsche Zufallsmatrix. Diese Lösung erzielt keine sinnvolle Approximation des
dünnbesetzten Signals.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 19 / 43
Beispielproblem
0 50 100−5
0
5
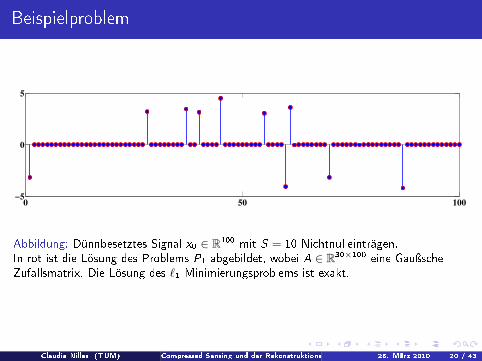
Abbildung: Dünnbesetztes Signal x0 ∈ R100 mit S = 10 Nichtnulleinträgen.
In rot ist die Lösung des Problems P1 abgebildet, wobei A ∈ R30×100 eine Gauÿsche
Zufallsmatrix. Die Lösung des `1-Minimierungsproblems ist exakt.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 20 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 21 / 43
Komprimierbare Signale und gestörte Daten
Zwei Fehlertypen:Komprimierbare Signale:x heiÿt S-compressible, falls höchstens S der Einträge xi groÿ und dierestlichen Einträge klein sind.
Messfehler:y = Ax + z , ‖z‖
2≤ ε.
Das `1-Minimierungsproblem wird zu
(P∗1) min ‖x‖
1u.d.N. ‖y − Ax‖
2≤ ε.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 22 / 43
Compressed Sensing für verrauschte Daten
SatzSei A ∈ Rm×n und erfülle die RIP der Ordnung 2S mit Isometrie-Konstante
δ2S <√2− 1.
Sei y , z ∈ Rm und x ∈ Rn mit y = Ax + z , wobei ‖z‖2≤ ε und bezeichne x∗
1die
Lösung des Optimierungsproblems (P∗1). Dann gilt folgende Abschätzung
‖x∗1− x‖
2≤ C0
‖x − xS‖1√S
+ C1ε,
wobei xS dem Vektor entspricht, bei dem alle bis auf die gröÿten S Einträge aufNull gesetzt sind.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 23 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 24 / 43
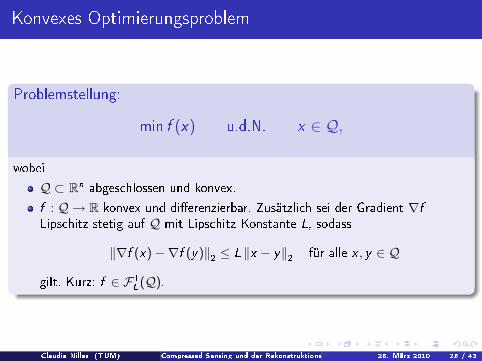
Konvexes Optimierungsproblem
Problemstellung:
min f (x) u.d.N. x ∈ Q,
wobei
Q ⊂ Rn abgeschlossen und konvex.
f : Q → R konvex und di�erenzierbar. Zusätzlich sei der Gradient ∇fLipschitz-stetig auf Q mit Lipschitz-Konstante L, sodass
‖∇f (x)−∇f (y)‖2≤ L ‖x − y‖
2für alle x , y ∈ Q
gilt. Kurz: f ∈ F1
L(Q).
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 25 / 43
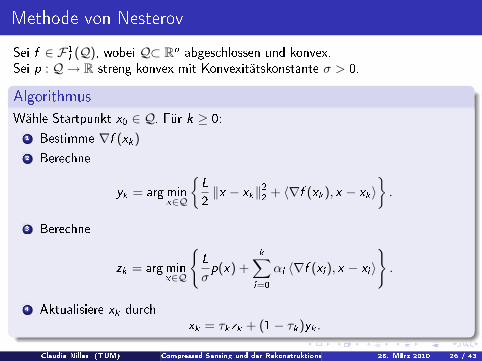
Methode von Nesterov
Sei f ∈ F1
L(Q), wobei Q⊂ Rn abgeschlossen und konvex.Sei p : Q → R streng konvex mit Konvexitätskonstante σ > 0.
AlgorithmusWähle Startpunkt x0 ∈ Q. Für k ≥ 0:
1 Bestimme ∇f (xk)
2 Berechne
yk = arg minx∈Q
{L
2‖x − xk‖22 + 〈∇f (xk), x − xk〉
}.
3 Berechne
zk = arg minx∈Q
{L
σp(x) +
k∑i=0
αi 〈∇f (xi ), x − xi 〉
}.
4 Aktualisiere xk durchxk = τkzk + (1− τk)yk .
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 26 / 43
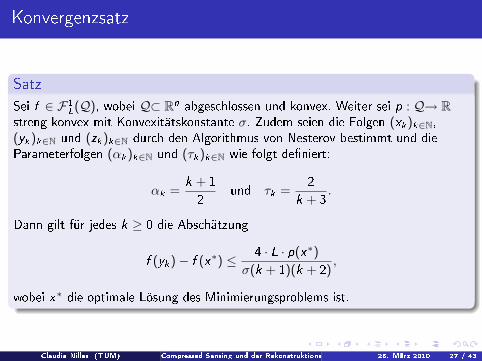
Konvergenzsatz
SatzSei f ∈ F1
L(Q), wobei Q⊂ Rn abgeschlossen und konvex. Weiter sei p : Q→ Rstreng konvex mit Konvexitätskonstante σ. Zudem seien die Folgen (xk)k∈N,(yk)k∈N und (zk)k∈N durch den Algorithmus von Nesterov bestimmt und dieParameterfolgen (αk)k∈N und (τk)k∈N wie folgt de�niert:
αk =k + 12
und τk =2
k + 3.
Dann gilt für jedes k ≥ 0 die Abschätzung
f (yk)− f (x∗) ≤ 4 · L · p(x∗)
σ(k + 1)(k + 2),
wobei x∗ die optimale Lösung des Minimierungsproblems ist.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 27 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 28 / 43
Problemstellung
Compressed Sensing Problem (P∗1)
min ‖x‖1
u.d.N. x ∈ Q = {x ∈ Rn : ‖y − Ax‖2≤ ε}.
Problem: Die `1-Norm als Zielfunktion erfüllt nicht die gefordertenGlattheitsbedingungen des Algorithmus von Nesterov.
Abhilfe: Wende den Algorithmus von Nesterov auf eine hinreichend glatteApproximation der `1-Norm an.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 29 / 43
Approximation an die `1-Norm
Huberfunktion
fµ(x) := maxu∈Qd
〈u, x〉 − µ
2‖u‖2
2mit Qd = {u ∈ Rn : ‖u‖∞ ≤ 1}.
Es gilt:
f0(x) = ‖x‖1und lim
µ→0
fµ(x) = ‖x‖1.
Für µ > 0 ist die Huberfunktion konvex und stetig di�erenzierbar mit
∇fµ(x)[i ] =
{µ−1x [i ], falls |x [i ]| < µ,
sgn(x [i ]), falls |x [i ]| ≥ µ.
Der Gradient ∇fµ(x) ist Lipschitz-stetig mit Lipschitz-Konstante Lµ = 1
µ .
Insgesamt gilt fµ ∈ F1
Lµ(Q) für µ > 0.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 30 / 43
Huberfunktion
1 2 3 4−1−2−3−4
1
2
3
4
−1
µ = 1
µ = 0.5
µ = 0.2
ℓ1-Norm
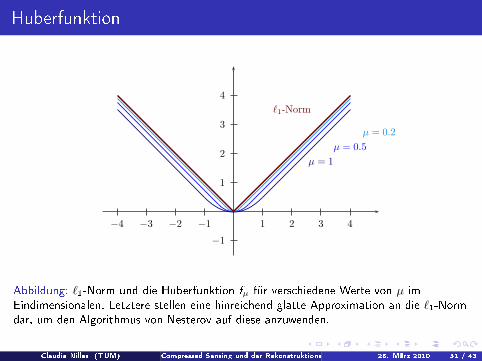
Abbildung: `1-Norm und die Huberfunktion fµ für verschiedene Werte von µ im
Eindimensionalen. Letztere stellen eine hinreichend glatte Approximation an die `1-Normdar, um den Algorithmus von Nesterov auf diese anzuwenden.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 31 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 32 / 43
Algorithmus NESTA
Problemstellung:
min fµ(x) u.d.N. x ∈ Q = {x ∈ Rn : ‖y − Ax‖2≤ ε}.
Wende zur Problemlösung den Algorithmus von Nesterov an mit
p(x) = 1
2‖x − x0‖22.
Konvergenzsatz:
fµ(yk)− fµ(x∗µ) ≤4 · Lµ · p(x∗µ)
σ(k + 1)(k + 2)=
2∥∥x∗µ − x0
∥∥22
µ(k + 1)(k + 2),
wobei x∗µ = arg minx∈Q
fµ(x).
Beschleunigung mit veränderlichen Werten des Parameters µ und Anpassung derAbbildung p.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 33 / 43
Numerische Untersuchungen
Rahmenbedingungen und Vorgehensweise:
Konstruktion eines dünnbesetzten Signals x ∈ Rn, mit n = 218 und S = n40
zufällig gewählten Nichtnulleinträgen, wobei |x(i)| ∈ [1, 105] (Hinzufügeneines Rauschens).
Messmatrix A ∈ Rm×n mit m = n8als zufällige Zeilen der diskreten
Cosinus-Transformation (Hinzufügen eines Störterms). Messungen sindgegeben durch: y = Ax + z .
Lösen des `1-Minimierungsproblems
min ‖x‖1
u.d.N. ‖Ax − y‖2≤ ε,
unter Verwendung des Algorithmus NESTA (µ = 0, 01).
⇒ 4-5 korrekte Dezimalstellen in der Lösung mit nur einigen hundert Iterationen.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 34 / 43
Ergebnisse
Direkter Zusammenhang zwischen der Genauigkeit der Lösung und demParameter µ. Keine Feinabstimmung der weiteren Parameter notwendig.
Stabilität bezüglich Störungen in den Daten.
Konstante Ergebnisse in den Testreihen.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 35 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 36 / 43
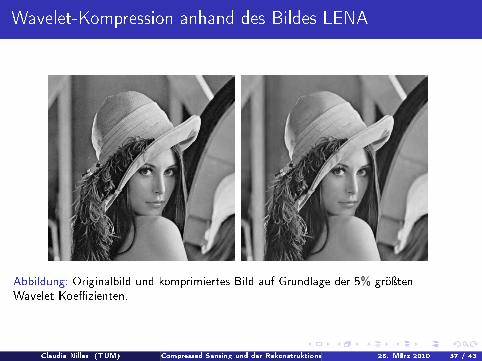
Wavelet-Kompression anhand des Bildes LENA
Abbildung: Originalbild und komprimiertes Bild auf Grundlage der 5% gröÿten
Wavelet-Koe�zienten.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 37 / 43
Gliederung
1 Theoretische Grundlagen des Compressed SensingDünnbesetzte Signale und das AbtastproblemCharakterisierung der Messung und Eindeutigkeit der Lösung
2 Methodik des Compressed SensingRekonstruktionsstrategienÄquivalenz der Probleme P0 und P1Compressed Sensing für komprimierbare Signale und gestörte Daten
3 Lösen des MinimierungsproblemsAlgorithmus von NesterovAnwendung auf das Compressed Sensing ProblemAlgorithmus NESTA
4 Anwendung auf ein digitales BildKlassische KompressionCompressed Sensing
5 Résumé
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 38 / 43
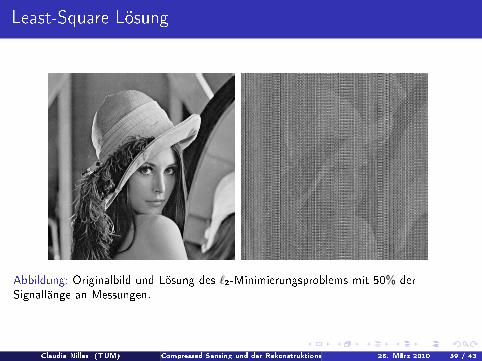
Least-Square Lösung
Abbildung: Originalbild und Lösung des `2-Minimierungsproblems mit 50% der
Signallänge an Messungen.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 39 / 43
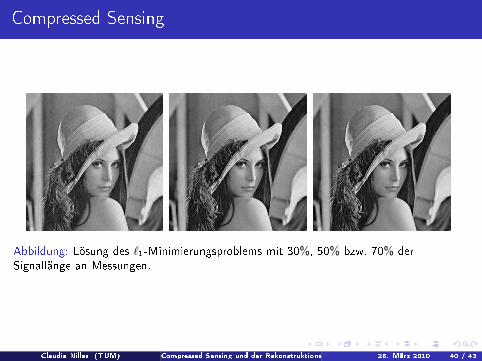
Compressed Sensing
Abbildung: Lösung des `1-Minimierungsproblems mit 30%, 50% bzw. 70% der
Signallänge an Messungen.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 40 / 43
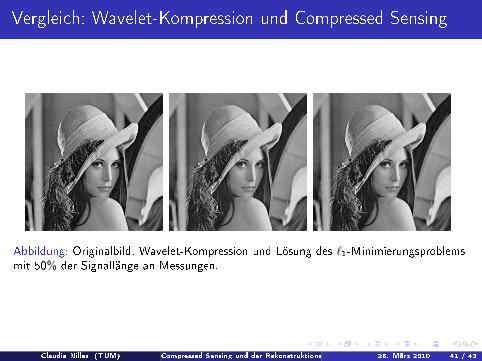
Vergleich: Wavelet-Kompression und Compressed Sensing
Abbildung: Originalbild, Wavelet-Kompression und Lösung des `1-Minimierungsproblems
mit 50% der Signallänge an Messungen.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 41 / 43
Résumé
Compressed Sensing ermöglicht die exakte Rekonstruktion von Signalen, diesich in einer bekannten Basis dünnbesetzt darstellen lassen, mit wesentlichweniger linearen Messungen als Freiheitsgrade.
Das Abtastproblem lässt sich als konvexes Optimierungsproblem formulieren.Somit ist ein akzeptabler Aufwand der Rekonstruktion garantiert.
Compressed Sensing genügt Wohlgestelltheitsanforderungen in dem Sinne,dass die Eindeutigkeit der Lösung und die Stabilität bezüglich Fehlern in denDaten gegeben ist.
Der Algorithmus NESTA eignet sich zur Rekonstruktion dünnbesetzterSignale und erzielt mit e�zientem Aufwand eine gute Rechengenauigkeit fürgroÿformatige Probleme.
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 42 / 43
Literatur
David L. Donoho, Michael Elad, Optimally sparse representation in general(nonorthogonal) dictionaries via `1-minimization, Proceedings of the NationalAcademy of Sciences of the United States of America (2003)
Emmanuel J. Candès, The restricted isometry property and its implicationsfor compressed sensing, Comptes Rendus Mathématique. Académie desSciences. Paris (2008)
Yurii Nesterov, Smooth minimization of non-smooth functions, A Publicationof the Mathematical Programming Society(2005)
Stephen Becker, Jerome Bobin and Emmanuel J.Candès, NESTA: a fast andaccurate �rst-order method for sparse recovery, California Institute ofTechnology (2009)
Claudia Nilles (TUM) Compressed Sensing und der Rekonstruktions-Algorithmus NESTA25. März 2010 43 / 43

















