
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Modellprädiktive Regelung nichtlinearersampled-data Systeme
L. Grüne1 D. Nešic2 J. Pannek1
1Mathematisches InstitutUniversität Bayreuth
2EEE DepartmentUniversity of Melbourne
13. Februar 2006Workshop Mathematische Systemtheorie, Elgersburg
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Gliederung
1 ProblemstellungProblemformulierungEmulationDer modellprädiktive Ansatz
2 Stabilität und (Sub–)Optimalität
3 Numerik des ProblemsProblemformulierungNumerische LösungNumerische Probleme
4 BeispieleModellErgebnisse
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Gliederung
1 ProblemstellungProblemformulierungEmulationDer modellprädiktive Ansatz
2 Stabilität und (Sub–)Optimalität
3 Numerik des ProblemsProblemformulierungNumerische LösungNumerische Probleme
4 BeispieleModellErgebnisse

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Gliederung
1 ProblemstellungProblemformulierungEmulationDer modellprädiktive Ansatz
2 Stabilität und (Sub–)Optimalität
3 Numerik des ProblemsProblemformulierungNumerische LösungNumerische Probleme
4 BeispieleModellErgebnisse
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Gliederung
1 ProblemstellungProblemformulierungEmulationDer modellprädiktive Ansatz
2 Stabilität und (Sub–)Optimalität
3 Numerik des ProblemsProblemformulierungNumerische LösungNumerische Probleme
4 BeispieleModellErgebnisse
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Problemformulierung
Zugrundeliegendes Modell
Vorgegeben ist ein Kontrollsystem
x(t) = f (x(t), u(t)),
das mit Hilfe eines digitalen Rechners online stabilisiert werdensoll.
1 u ∈ U ist als statisches / dynamisches Zustandsfeedbackzu implementieren.
2 Lediglich zu vorgegebenen diskreten Zeitpunkten kanneingegriffen werden.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Problemformulierung
Zugrundeliegendes Modell
Vorgegeben ist ein Kontrollsystem
x(t) = f (x(t), u(t)),
das mit Hilfe eines digitalen Rechners online stabilisiert werdensoll.
1 u ∈ U ist als statisches / dynamisches Zustandsfeedbackzu implementieren.
2 Lediglich zu vorgegebenen diskreten Zeitpunkten kanneingegriffen werden.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Problemformulierung
Abtastfunktionen
Gesucht wird eine Funktion uT : Rn → U, so dass der Ursprungasymptotisch stabil ist für das System
x(t) = f (x(t), uT (x(tk )))
mit fester Abtast–Rate T > 0.
Dabei bezeichnet man tk = k · T als Abtast–Zeiten, an denenSprünge im Feedback auftreten können.

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Problemformulierung
Abtastfunktionen
Gesucht wird eine Funktion uT : Rn → U, so dass der Ursprungasymptotisch stabil ist für das System
x(t) = f (x(t), uT (x(tk ))︸ ︷︷ ︸konstant auf[tk ,tk+1)
)
mit fester Abtast–Rate T > 0.
Dabei bezeichnet man tk = k · T als Abtast–Punkte, an denenSprünge im Feedback auftreten können.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Emulation
Emulationslösungen — der einfache Weg
Vorgehensweise:
1 Finde stabilisierendes u(x(t)) für das kontinuierlicheSystem
2 Wähle uT (x(tk )) = u(x(tk )) für t ∈ [tk , tk+1), tk = k · T
↓
Für diese Lösung kann asymptotische Stabilität für hinreichendkleine T gezeigt werden.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Emulation
Emulationslösungen — der einfache Weg
Vorgehensweise:
1 Finde stabilisierendes u(x(t)) für das kontinuierlicheSystem
2 Wähle uT (x(tk )) = u(x(tk )) für t ∈ [tk , tk+1), tk = k · T
↓
Für diese Lösung kann asymptotische Stabilität für hinreichendkleine T gezeigt werden.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Grundlegende Ziele
1 Länge der Abtast–Intervalle vergrößern
2 Referenz-Lösung möglichst exakt “nachfahren“
3 Stabilität der erhaltenen Lösung
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Annahmen
Man betrachtet zwei Systeme:
x(t) = f (x(t), u(x(t))), x(t0) = x Referenz–Lösung
ξ(t) = f (ξ(t), vi), ξ(t0) = ξ, t ∈ [ti , ti+1)
mit u(x(t)) ist ein zulässiges kontinuierlichesZustandsfeedback vorgegeben
zudem stabilisiert u(x(t)) das kontinuierliches closed–loopSystem x(t)
Gesucht: digitales Feedback (vk )k∈N
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Annahmen
Man betrachtet zwei Systeme:
x(t) = f (x(t), u(x(t))), x(t0) = x Referenz–Lösung
ξ(t) = f (ξ(t), vi), ξ(t0) = ξ, t ∈ [ti , ti+1)
mit u(x(t)) ist ein zulässiges kontinuierlichesZustandsfeedback vorgegeben
zudem stabilisiert u(x(t)) das kontinuierliches closed–loopSystem x(t)
Gesucht: digitales Feedback (vk )k∈N

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Annahmen
Man betrachtet zwei Systeme:
x(t) = f (x(t), u(x(t))), x(t0) = x Referenz–Lösung
ξ(t) = f (ξ(t), vi), ξ(t0) = ξ, t ∈ [ti , ti+1)
mit u(x(t)) ist ein zulässiges kontinuierlichesZustandsfeedback vorgegeben
zudem stabilisiert u(x(t)) das kontinuierliches closed–loopSystem x(t)
Gesucht: digitales Feedback (vk )k∈N

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Konzept
Bestimmung eines Feedbacks uT für das ξ–System, dasbei paralleler Betrachtung des kontinuierlichfeedback–gesteuerten x–Systems die geringstmöglicheAbweichung erzeugt
JM(ξ, x , uT )) :=∞∑
i=0
ti+1∫ti
l(ξ(t)− x(t), uT (ti))dt −→ min
⇒ Problem muss auf unendlichem Zeithorizont gelöst werden(HJB-Gleichung)

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Konzept
Bestimmung eines Feedbacks uT für das ξ–System, dasbei paralleler Betrachtung des kontinuierlichfeedback–gesteuerten x–Systems die geringstmöglicheAbweichung erzeugt
JM(ξ, x , uT )) :=∞∑
i=0
ti+1∫ti
l(ξ(t)− x(t), uT (ti))dt −→ min
⇒ Problem muss auf unendlichem Zeithorizont gelöst werden(HJB-Gleichung)
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
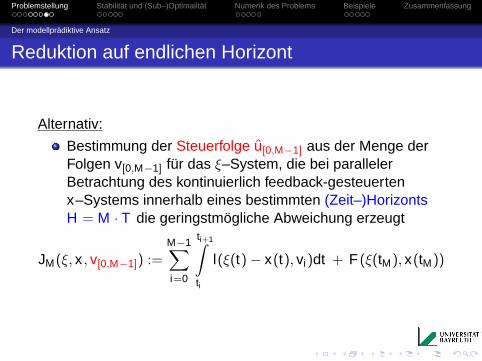
Reduktion auf endlichen Horizont
Alternativ:
Bestimmung der Steuerfolge u[0,M−1] aus der Menge derFolgen v[0,M−1] für das ξ–System, die bei parallelerBetrachtung des kontinuierlich feedback-gesteuertenx–Systems innerhalb eines bestimmten (Zeit–)HorizontsH = M · T die geringstmögliche Abweichung erzeugt
JM(ξ, x , v[0,M−1]) :=M−1∑i=0
ti+1∫ti
l(ξ(t)− x(t), vi)dt + F (ξ(tM), x(tM))
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
t
T
Horizont
H
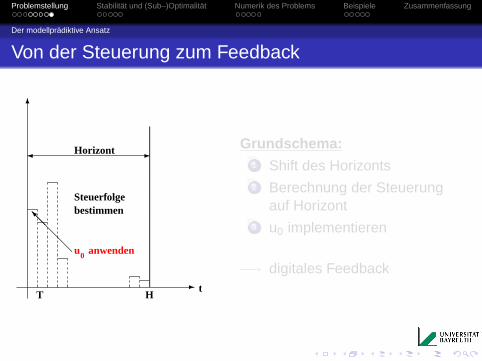
Steuerfolgebestimmen
u0 anwendenu0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
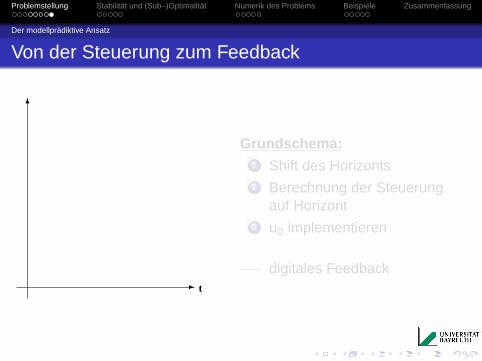
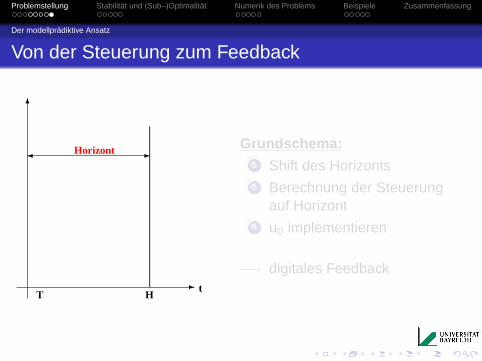
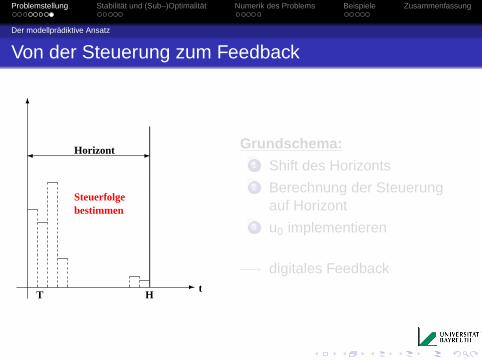
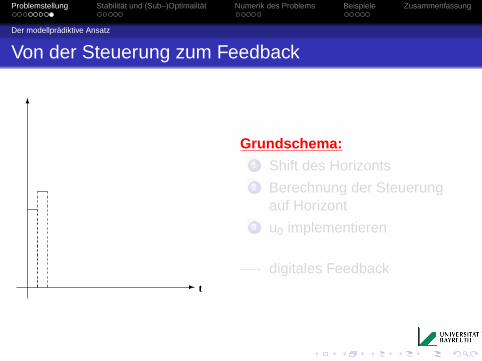
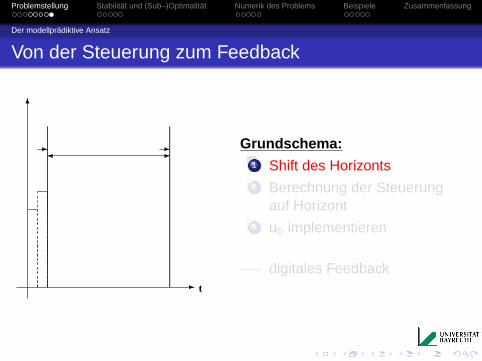
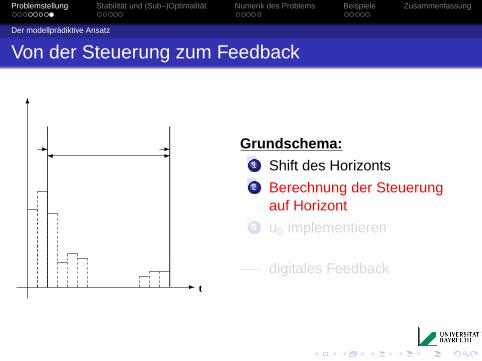
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-.................................................................................................................................................................................................................................................................................................................................................................................................................
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
tT
Horizont
H
Steuerfolgebestimmen
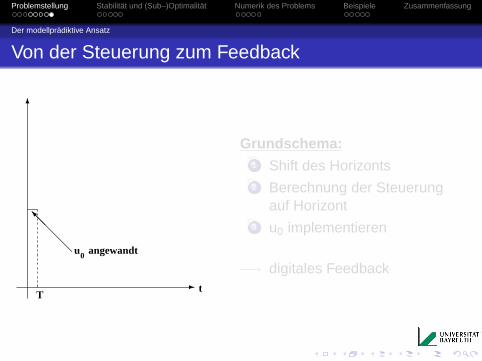
u0 anwendenu0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-.................................................................................................................................................................................................................................................................................................................................................................................................................
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
tT
Horizont
H
Steuerfolgebestimmen
u0 anwendenu0 angewandt
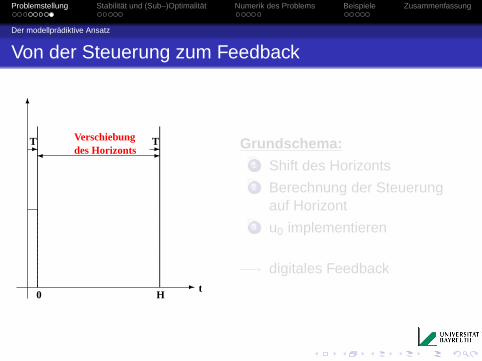
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-.................................................................................................................................................................................................................................................................................................................................................................................................................
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
tT
Horizont
H
Steuerfolgebestimmen
u0 anwenden
u0 angewandt
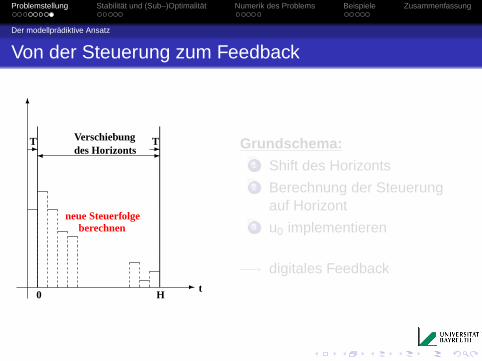
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
tT
Horizont
H
Steuerfolgebestimmen
u0 anwenden
u0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
t
T
Horizont
H
Steuerfolgebestimmen
u0 anwendenu0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
t
T
Horizont
H
Steuerfolgebestimmen
u0 anwendenu0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
t
T
Horizont
H
Steuerfolgebestimmen
u0 anwendenu0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
t
T
Horizont
H
Steuerfolgebestimmen
u0 anwendenu0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
t
T
Horizont
H
Steuerfolgebestimmen
u0 anwendenu0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
t
T
Horizont
H
Steuerfolgebestimmen
u0 anwendenu0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Der modellprädiktive Ansatz
Von der Steuerung zum Feedback
6
-
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -
@@
@@I
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
..........
.
� -- -
t
T
Horizont
H
Steuerfolgebestimmen
u0 anwendenu0 angewandt
Verschiebungdes Horizonts
TT
0 H
neue Steuerfolgeberechnen
Grundschema:1 Shift des Horizonts2 Berechnung der Steuerung
auf Horizont3 u0 implementieren
−→ digitales Feedback
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Stabilität
Stabilität
Ziel:
Stabilität des kontinuierlichen MPC–geregelten
sampled–data Systems
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Stabilität
Stabilitätsbeweis
Theorem (Grimm, Messina, Teel, Tuna 2004)
Beweis der semiglobal praktisch asymptotischen Stabilität für
exaktes zeitdiskretes sampled-data System
unter den Voraussetzungen
Q und F sind stetig,
U ist beschränkt,
das System ist detektierbar,
die Wertefunktion Vi(ξ, x) ist durch eine Funktion α ∈ K∞nach oben beschränkt.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Stabilität
Stabilitätsbeweis
Theorem (Nešic, Grüne, 2004)
Semiglobal praktisch asymptotische Stabilität kann für das
kontinuierliche sampled–data System mit MPC–Regelung
gezeigt werden, wenn
Detektierbarkeit des exakten zeitdiskreten Systems ausBedingungen an das kontinuierliche System gefolgertwerden kann.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Stabilität
Stabilitätsbeweis
Praxis:
Verwendung von approximierten zeitdiskreten Systemen
aber:
⇒ Rückschluss auf exakte zeitdiskrete Systeme(Nešic, Teel, Kokotovic 1999)
⇒ Schluss auf kontinuierliche Systeme(Nešic, Teel, Sontag 1999 / Nešic, Teel 2004)
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Stabilität
Stabilitätsbeweis
Praxis:
Verwendung von approximierten zeitdiskreten Systemen
aber:
⇒ Rückschluss auf exakte zeitdiskrete Systeme(Nešic, Teel, Kokotovic 1999)
⇒ Schluss auf kontinuierliche Systeme(Nešic, Teel, Sontag 1999 / Nešic, Teel 2004)

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Optimalität
(Sub–)Optimalität
Theorem (Nešic, Grüne 2004)
Unter standardmäßigen Voraussetzungen an F kann gezeigtwerden, dass das bestimmte Feedback uM invers optimal ist.Insbesondere existiert eine Funktion l ≥ l , für die uM dasFunktional
J(ξ, x , u[0,∞)) :=∞∑
i=0
∫ T
0l(ξ(t)− x(t), ui)dt (1)
minimiert.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Problemformulierung
Problemformulierung
In jedem Schritt ist ein Problem der Form
Optimaler Steuerprozess
Finde u[0,M−1] = arg minv[0,M−1]
JM(ξ, x , v[0,M−1])
auf einem Horizont
[t0, tM ] = [j · T , (j + M) · T ] , j ∈ N
zu lösen.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Problemformulierung
Problemformulierung
In jedem Schritt ist ein Problem der Form
Optimaler Steuerprozess
Finde u[0,M−1] = arg minv[0,M−1]
JM(ξ, x , v[0,M−1])
Verwendet wird hierbei das Zielfunktional
JM(ξ, x , v[0,M−1]) :=M−1∑i=0
ti+1∫ti
l(ξ(t)− x(t), vi)dt + F (ξ(tM), x(tM))
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Problemformulierung
Problemformulierung
In jedem Schritt ist ein Problem der Form
Optimaler Steuerprozess
Finde u[0,M−1] = arg minv[0,M−1]
JM(ξ, x , v[0,M−1])
unter den Nebenbedingungen
vi ∈ U ∀i ∈ {0, . . . , M − 1}ξ(t) = f (ξ(t), vi), ξ(t0) = ξ, t ∈ [ti , ti+1)
x(t) = f (x(t), u(x(t))), x(t0) = x
ti = t0 + i · T , i ∈ {0, . . . , M}.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Lösung
Numerische Lösung — Vorgaben
Vorgaben:
Problemstellung macht die Verwendung einesäquidistanten Gitters mit Schrittweite T notwendig
⇒ keine Gitteranpassung möglich
da T möglichst groß gewählt werden soll
⇒ Schrittweitensteuerung innerhalb jedes Teilintervalls nötig
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Lösung
Numerische Lösung — Vorgaben
Vorgaben:
Problemstellung macht die Verwendung einesäquidistanten Gitters mit Schrittweite T notwendig
⇒ keine Gitteranpassung möglich
da T möglichst groß gewählt werden soll
⇒ Schrittweitensteuerung innerhalb jedes Teilintervalls nötig
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Lösung
Numerische Lösung — Umsetzung
Verwendung eines direkten Ansatzes zur Lösung der Folge vonoptimalen Steuerprozessen
Diskretisierung der Zustandssysteme sowie desZielfunktionals
⇒ Optimierungsproblem mit vielen Nebenbedingungen
Integral–Anteil kann dabei mittels Transformation in dasDifferentialgleichungssystem aufgenommen und berechnetwerden

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Lösung
Numerische Lösung — Umsetzung
Verwendung eines direkten Ansatzes zur Lösung der Folge vonoptimalen Steuerprozessen
Diskretisierung der Zustandssysteme sowie desZielfunktionals
⇒ Optimierungsproblem mit vielen Nebenbedingungen
Integral–Anteil kann dabei mittels Transformation in dasDifferentialgleichungssystem aufgenommen und berechnetwerden
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Probleme
Problemfeld Anfangslösung
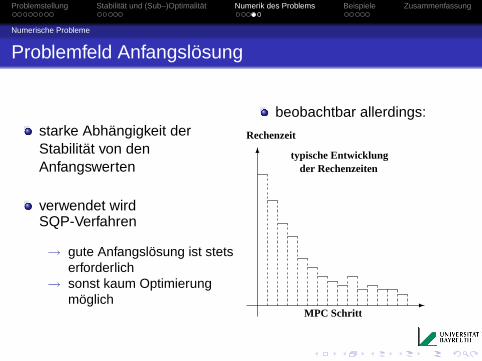
starke Abhängigkeit derStabilität von denAnfangswerten
verwendet wirdSQP-Verfahren
→ gute Anfangslösung ist stetserforderlich
→ sonst kaum Optimierungmöglich
beobachtbar allerdings:
6
-MPC Schritt
Rechenzeit
typische Entwicklungder Rechenzeiten
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Probleme
Problemfeld Anfangslösung
starke Abhängigkeit derStabilität von denAnfangswerten
verwendet wirdSQP-Verfahren
→ gute Anfangslösung ist stetserforderlich
→ sonst kaum Optimierungmöglich
beobachtbar allerdings:
6
-MPC Schritt
Rechenzeit
typische Entwicklungder Rechenzeiten
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Probleme
Problemfeld Anfangslösung
starke Abhängigkeit derStabilität von denAnfangswerten
verwendet wirdSQP-Verfahren
→ gute Anfangslösung ist stetserforderlich
→ sonst kaum Optimierungmöglich
beobachtbar allerdings:
6
-MPC Schritt
Rechenzeit
typische Entwicklungder Rechenzeiten
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Probleme
Problemfeld Horizontlänge
Instabilitäten können für sehr groß gewählte T auftreten
⇒ mittels Verkürzung des Horizonts evtl. vermeidbar
aber: es existiert eine untere Schranke für dieHorizontlänge (aus Stabilitätstheorem)
zudem: längere Horizonte liefern in der Regel bessereErgebnisse
längerer Horizont vergrößert Rechenzeit
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Probleme
Problemfeld Horizontlänge
Instabilitäten können für sehr groß gewählte T auftreten
⇒ mittels Verkürzung des Horizonts evtl. vermeidbar
aber: es existiert eine untere Schranke für dieHorizontlänge (aus Stabilitätstheorem)
zudem: längere Horizonte liefern in der Regel bessereErgebnisse
längerer Horizont vergrößert Rechenzeit
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Probleme
Problemfeld Horizontlänge
Instabilitäten können für sehr groß gewählte T auftreten
⇒ mittels Verkürzung des Horizonts evtl. vermeidbar
aber: es existiert eine untere Schranke für dieHorizontlänge (aus Stabilitätstheorem)
zudem: längere Horizonte liefern in der Regel bessereErgebnisse
längerer Horizont vergrößert Rechenzeit

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Probleme
Problemfeld Horizontlänge
Instabilitäten können für sehr groß gewählte T auftreten
⇒ mittels Verkürzung des Horizonts evtl. vermeidbar
aber: es existiert eine untere Schranke für dieHorizontlänge (aus Stabilitätstheorem)
zudem: längere Horizonte liefern in der Regel bessereErgebnisse
längerer Horizont vergrößert Rechenzeit
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Numerische Probleme
Problemfeld Horizontlänge
Instabilitäten können für sehr groß gewählte T auftreten
⇒ mittels Verkürzung des Horizonts evtl. vermeidbar
aber: es existiert eine untere Schranke für dieHorizontlänge (aus Stabilitätstheorem)
zudem: längere Horizonte liefern in der Regel bessereErgebnisse
längerer Horizont vergrößert Rechenzeit
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Modell
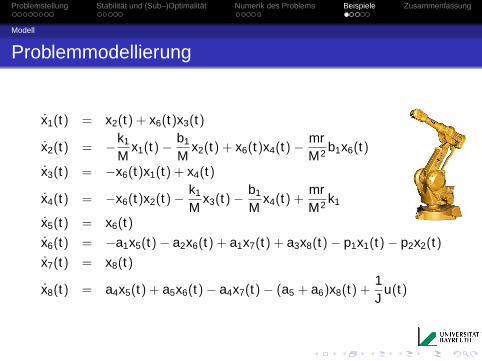
Problemmodellierung
x1(t) = x2(t) + x6(t)x3(t)
x2(t) = −k1
Mx1(t)−
b1
Mx2(t) + x6(t)x4(t)−
mrM2 b1x6(t)
x3(t) = −x6(t)x1(t) + x4(t)
x4(t) = −x6(t)x2(t)−k1
Mx3(t)−
b1
Mx4(t) +
mrM2 k1
x5(t) = x6(t)
x6(t) = −a1x5(t)− a2x6(t) + a1x7(t) + a3x8(t)− p1x1(t)− p2x2(t)
x7(t) = x8(t)
x8(t) = a4x5(t) + a5x6(t)− a4x7(t)− (a5 + a6)x8(t) +1J
u(t)

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Modell
Dynamische Regelung
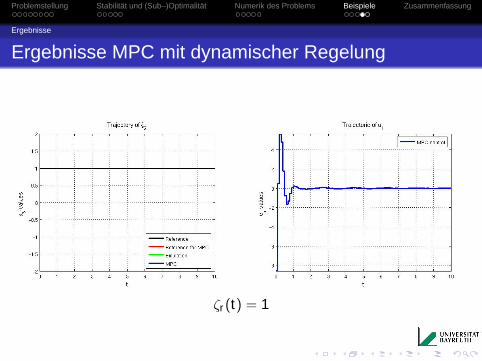
Ausgang des Systems:
ζ(t) := x5(t)−a3
a1 − a2a3
(x6(t)− a3x7(t)
)≈ x5(t)
Ziel:
ζ(t) soll eine vorgegebene Referenzfunktion ζr (t)asymptotisch annähern

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Modell
Dynamische Regelung
Ausgang des Systems:
ζ(t) := x5(t)−a3
a1 − a2a3
(x6(t)− a3x7(t)
)≈ x5(t)
Ziel:
ζ(t) soll eine vorgegebene Referenzfunktion ζr (t)asymptotisch annähern
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Modell
Dynamische Regelung
Die dynamische Regelung ist dabei gegeben durch
u(t) = g(z(t))
z(t) = h(z(t), v(t)) , z(t0) = z0.
Vorgehensweise:
1 Bestimme ζ(k) = ∂ζ∂tk , k = 0, . . ., bis gilt ∂ζ(k)
∂u 6= 0
2 Auflösen nach u3 Erweitere u um v und setze ein ⇒ ζ(k) = v
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Modell
Dynamische Regelung
Die dynamische Regelung ist dabei gegeben durch
u(t) = g(z(t))
z(t) = h(z(t), v(t)) , z(t0) = z0.
Die Funktion v ist dabei aus der Differenz zwischen Ausgang ζund Referenzfunktion ζr sowie den Differenzen der Ableitungengeeignet zusammenzusetzen.
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Ergebnisse
Ergebnisse MPC mit dynamischer Regelung
ζr (t) = 1
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Ergebnisse
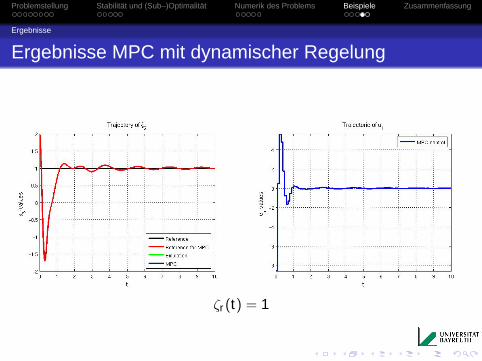
Ergebnisse MPC mit dynamischer Regelung
ζr (t) = 1
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Ergebnisse
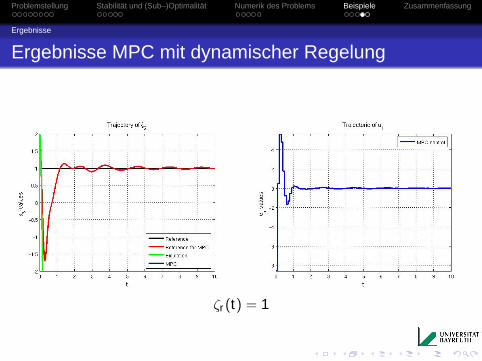
Ergebnisse MPC mit dynamischer Regelung
ζr (t) = 1
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Ergebnisse
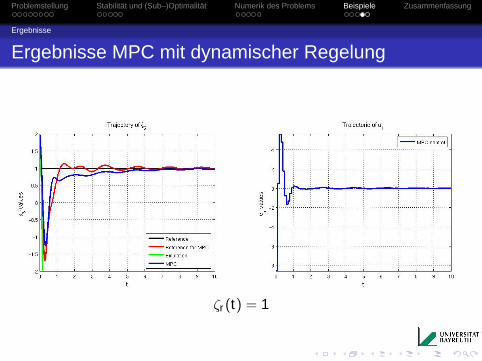
Ergebnisse MPC mit dynamischer Regelung
ζr (t) = 1

Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Ergebnisse
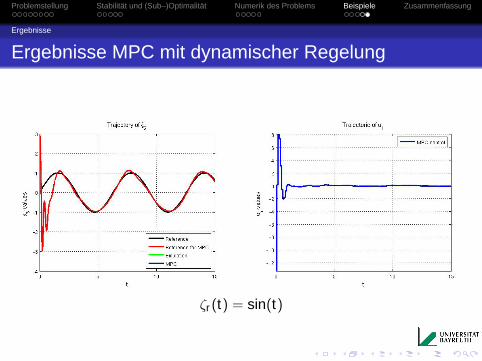
Ergebnisse MPC mit dynamischer Regelung
ζr (t) = sin(t)
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Ergebnisse
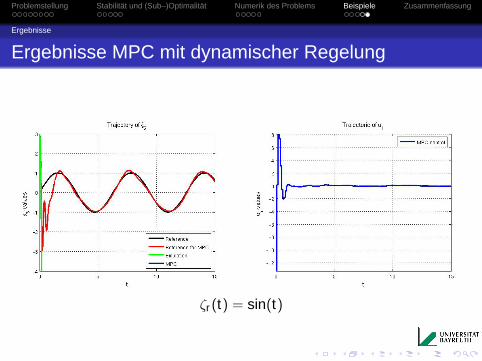
Ergebnisse MPC mit dynamischer Regelung
ζr (t) = sin(t)
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Ergebnisse
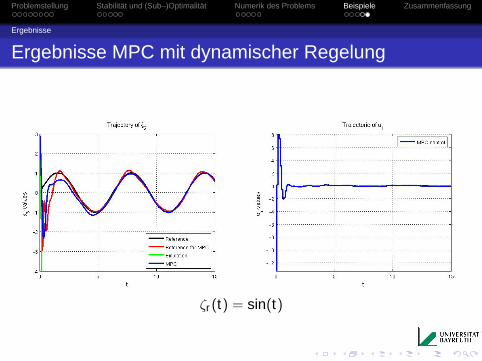
Ergebnisse MPC mit dynamischer Regelung
ζr (t) = sin(t)
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Ergebnisse
Ergebnisse MPC mit dynamischer Regelung
ζr (t) = sin(t)
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Zusammenfassung
Fazit:
MPC–Lösungen generell besser als Emulation
Verlängerung der Abtast–Intervalle möglich
Tracking möglich
Ausblick:
Verbesserung der Startlösung
Stabilitätsbeweis des Trackingproblems
Problemstellung Stabilität und (Sub–)Optimalität Numerik des Problems Beispiele Zusammenfassung
Zusammenfassung
Fazit:
MPC–Lösungen generell besser als Emulation
Verlängerung der Abtast–Intervalle möglich
Tracking möglich
Ausblick:
Verbesserung der Startlösung
Stabilitätsbeweis des Trackingproblems







