
PROCONTROL PGeräte- undAnwendungsbeschreibung
PROPOS
Intelligenter Stell- und Regel-antrieb für PROCONTROL P
Druckschrift ---Nr.D KWL 6328 95 D, Ausgabe 10/99Ersetzt D KWL 6328 95 D, Ausg. 12/96
Inhalt
1 Anwendung 2. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
2 Interne Sensorik und Überwachung 4. . . . . . . . . . . . . .
2.1 Strommessung 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.2 Spannungsnulldurchgangs---Messung 4. . . . . . . . . . . . . .2.3 Phasenfolge---Überwachung 4. . . . . . . . . . . . . . . . . . . . . . .2.4 Netzfrequenz---Überwachung 4. . . . . . . . . . . . . . . . . . . . . .2.5 Elektronikspannungs---Versorgung
und ---Überwachung 4. . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.6 Leistungsspannungs---Überwachung 4. . . . . . . . . . . . . . .2.7 Leistungsfaktor---Ermittlung (Option) 4. . . . . . . . . . . . . . . .2.8 Fehlerstrom---Überwachung (Option) 4. . . . . . . . . . . . . . .2.9 Kühlkörpertemperatur---Überwachung 4. . . . . . . . . . . . . .2.10 Motortemperatur---Erfassung 4. . . . . . . . . . . . . . . . . . . . . .2.11 Stellweg---Erfassung 5. . . . . . . . . . . . . . . . . . . . . . . . . . . . .2.12 Drehmoment---Erfassung 5. . . . . . . . . . . . . . . . . . . . . . . . .2.13 Drehrichtung der Armatur 5. . . . . . . . . . . . . . . . . . . . . . . . .
3 Externe Sensorik und Überwachung 5. . . . . . . . . . . . . .
3.1 Universaleingang (Option) 5. . . . . . . . . . . . . . . . . . . . . . . .3.2 Kombi---Eingang für analoge Messungen
4 bis 20 mA oder Binärsignale (Option) 5. . . . . . . . . . . . .
4 Funktionen und Überwachungen 6. . . . . . . . . . . . . . . . .
4.1 Thermischer Überlastschutz 6. . . . . . . . . . . . . . . . . . . . . . .4.2 Stromgrenzwert---Überwachung
und Strombegrenzungs---Regelung (Option) 6. . . . . . . . .4.3 Motorbremse 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.4 Sanftanlauf, Sanftauslauf 6. . . . . . . . . . . . . . . . . . . . . . . . . .4.5 Blockierschutz 6. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.6 Unterlast 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.7 Schieflast (Option) 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .4.8 Motorstart ---Überwachung 7. . . . . . . . . . . . . . . . . . . . . . . . .4.9 Schalthäufigkeits---Diagnose 7. . . . . . . . . . . . . . . . . . . . . . .4.10 Thyristortest 7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5 Grundeinstellungs---Parameter 7. . . . . . . . . . . . . . . . . . .
6 Wartungsplanung 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7 Vor---Ort ---Eingriffe (Option) 8. . . . . . . . . . . . . . . . . . . . . .
8 Externe Schnittstellen 8. . . . . . . . . . . . . . . . . . . . . . . . . . .
8.1 Serielle Schnittstelle (Option) 8. . . . . . . . . . . . . . . . . . . . . .
8.2 PROCONTROL P Feldbusanschluß 8. . . . . . . . . . . . . . . . .
8.3 Feldbusadresse 8. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
8.4 Leistungsspannungsanschluß 9. . . . . . . . . . . . . . . . . . . . .
9 PROCONTROL P---Verarbeitungsteil 9. . . . . . . . . . . . . .
9.1 Verarbeitung 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.2 Strukturierung 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.3 Adressierung 9. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.4 Parameterliste (Struktur) 10. . . . . . . . . . . . . . . . . . . . . . . . .
9.5 Simulation 10. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.6 Ereignisbildung 11. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.7 Störungsbitauswertung, Empfangsüberwachung 11. . . .
9.8 Diagnose und Meldefunktionen 11. . . . . . . . . . . . . . . . . . .
9.9 Gerätebetriebszustände 13. . . . . . . . . . . . . . . . . . . . . . . . .
9.10 Gerätezykluszeit 13. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
9.11 Funktionsbausteine 14. . . . . . . . . . . . . . . . . . . . . . . . . . . . .
10 Funktionsschaltbild 15. . . . . . . . . . . . . . . . . . . . . . . . . . . .
11 Anschlußschaltbilder 16. . . . . . . . . . . . . . . . . . . . . . . . . . .
11.1 Antrieb 16. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
11.2 Externe Eingänge (Option) 17. . . . . . . . . . . . . . . . . . . . . . .
12 Mechanischer Aufbau 18. . . . . . . . . . . . . . . . . . . . . . . . . .
13 Technische Daten 19. . . . . . . . . . . . . . . . . . . . . . . . . . . . . .

PROPOS
2
1 Anwendung
Im intelligenten Stell- und Regelantrieb PROPOS sind inte-griert:
--- Thyristor---Leistungssteller
--- Schaltanlagen---Leittechnik mit Diagnose- und Schutzfunk-tionen
--- PROCONTROL P ---Prozeßleittechnik für den Antrieb mitMeß-, Schutz-, Steuer-. und Regelfunktionen
--- Sensoren für Motorstrom und Fehlerstrom
--- Sensoren für Stellung, Drehmoment und Motortemperatur
--- Mechanischer Stell- und Regelantrieb mit Motor und Ge-triebe.
Er ist über den PROCONTROL P --- Feldbus direkt in dasKraftwerksleitsystem PROCONTROL P eingebunden.
Der intelligente Stell- und Regelantrieb kann als Komponenteinnerhalb des Kraftwerksleitsystems eingesetzt werden. Diekomplette Antriebsleittechnik ist bereits enthalten.
Alle Prozeßdaten des Kraftwerksleitsystems stehen dem intelli-genten Stell- und Regelantrieb zur Verarbeitung zur Verfü-gung.
Alle Prozeßdaten des intelligenten Stell- und Regelantriebskönnen über das Kraftwerksleitsystem PROCONTROL P anbeliebiger Stelle dem Anwender bereitgestellt werden.
Die Prozeßleittechnik im intelligenten Stell- und Regelantriebenthält alle relevanten PROCONTROL P---Funktionsbausteine.
Jeder intelligente Stell- und Regelantrieb kann
--- von einer zentralen Warte zur Prozeßbedienung gefahrenund überwacht werden,
--- von einer zentralen Diagnose---Station parametriert werden.Hier erfolgt auch die detaillierte Diagnose, d. h. die Anzeigeder Meldungen aus den Überwachungen der einzelnenFunktionen.
--- von einem PDAS mit dem erforderlichen Anwenderpro-gramm, d. h. der Verknüpfung der relevanten PROCON-TROL P---Funktionsbausteine, strukturiert und geladen wer-den.
Er ist für den Einsatz mit der Prozeßbedienstation (PBS) vorge-sehen.
Er kann für folgende Anwendungsfälle eingesetzt werden(siehe Tabelle 1):
--- Steuerantrieb einschl. Logik der Antriebsleitebene--- Regelantrieb einschl. Logik der Einzelleitebene.
Durch einen entsprechenden Adapter an der Abtriebsschnitt-stelle (siehe “Mechanischer Aufbau”) erfolgt die Anpassung andie jeweilige Armatur.
Der modulare Aufbau von PROPOS erlaubt den Austauscheinzelner Module. Dazu ist die Betriebsanleitung zu beachten.
Hinweise:
Die bei den nachfolgend beschriebenen Funktionen genann-ten Defaultwerte sind all diejenigen Werte, die die Elektronik-geräte als Grundzustand bei der Anlieferung aus der Elektro-nik---Fertigung haben.
Bei Auslieferung an den Anwender können die Werte davonabweichen.
Die richtige Einstellung der Parameter im Betrieb liegt in Ver-antwortung des Anwenders.

PROPOS
3
Steuer---Drehantriebe Regel---DrehantriebeAntriebstyp
Drehmomentbereich
min.---max.einstellbar
Drehzahlbereich*)
Antriebstyp
max.Regelmoment
Drehmomentbereich
min.---max.einstellbar
Drehzahlbereich
Nm 1/min Nm Nm 1/min
DBM II 30 10 --- 30 DBM II R 30 15 0 --- 30
DBM II 59 20 --- 60 5 ... 160 DBM II R 59 30 0 --- 60
DBM II 60 20 --- 60 DBM II R 60 30 0 --- 60
DBM II 120 40 --- 120 DBM II R 120 60 0 --- 120 5 ... 40
DBM II 249 80 --- 200 5 ... 80 DBM II R 250 120 0 --- 250
DBM II 250 80 --- 250 DBM II R 500 200 0 --- 500
DBM II 500 150 --- 500 5 ... 160 DBM II R 1000 500 0 --- 1000 5 ... 25
DBM II 1000 300 --- 1000 5 ... 80
Steuer---Schubantriebe Regel---Schubantriebe
Antriebstyp
Schubkraftbereich
min.---max.einstellbar
max.Hub
Stellzeitfürmax.Hub
Antriebstyp
max.Regelschubkraft
Schubkraftbereich
min.---max.einstellbar
max.Hub
Stellzeitfürmax.Hub
kN mm s kN kN mm s
DLBM II 15DLBM II 20
5 --- 1510 --- 20
100 9,5 ... 300 DLBM II R 15DLBM II R 20
810
0 --- 150 --- 20
100 38 ... 300
DLBM II 40DLBM II 80
15 --- 4030 --- 80
350 22 ... 700 DLBM II R 40DLBM II R 80
2040
0 --- 400 --- 80
350 88 ... 700
Steuer---Schwenkantriebe Regel---Schwenkantriebe
Antriebstyp
Drehmomentbereich
min.---max.einstellbar
Stellzeitfür90Grad
Antriebstyp
max.Regelmoment
Drehmomentbereich
min.---max.einstellbar
Stellzeitfür90Grad
Nm s Nm Nm s
DPBM II 30DPBM II 59DPBM II 119DPBM II 250**)DPBM II 319DPBM II 799DPBM II 1599DPBM II 3200
10 --- 3020 --- 6040 --- 12080 --- 250120 --- 320320 --- 800800 --- 16001600 --- 3200
8 ... 60
DPBM II R 240DPBM II R 500DPBM II R 1000DPBM II R 2000DPBM II R 3000
12025050010001500
0 --- 2400 --- 5000 --- 10000 --- 20000 --- 3000
12 ... 9619 ... 15028 ... 22528 ... 22528 ... 225
*) Antriebe mit 120/160 min---1 sind nicht selbsthemmend. **) In Vorbereitung.
Tabelle 1: Typenreihe der intelligenten Stell- und Regelantriebe PROPOS (Standard---Ausführung)

PROPOS
4
2 Interne Sensorik und Überwachung
2.1 Strommessung
Der Motorstrom wird einphasig mit einem kompensiertenStromwandler gemessen. Aufgrund der vorhandenen Dreh-moment- und Temperaturüberwachung ist die einphasigeStrommessung ausreichend.
Das Meßsignal wird elektronisch aufbereitet.
Der Motorstrom kann an der Diagnose---Station sowohl als Ab-solutwert als auch als Prozentwert angezeigt werden. Dabeientsprechen 100 % dem eingegebenen Bemessungsstrom.
Der Motorstrom kann zusätzlich als Prozentwert auf PROCON-TROL P aufgeschaltet werden.
Durch eine automatische Anpassung der Meßempfindlichkeitist die Meßunsicherheit bezogen auf den Meßwert für Strömeab 0,35 A < 2 %.
Als Parameter werden werksseitig eingestellt(Defaultwert in Klammern)
--- Bemessungsstrom 0,06 bis 25 A (0 A)MUSS---Eintrag
--- Meßbereichsende 100 % 0,06 bis 200 A(Bemessungsstrom)
--- Meßbereichsanfang 0 % 0,01 bis 200 A (0 A)
2.2 Spannungsnulldurchgangs---Messung
Der Spannungsnulldurchgang jeder Netzphase wird binär er-faßt. Der Spannungsabgriff befindet sich jeweils an derLeistungszuführung. Der Spannungsabgriff ist von der Signal-elektronik galvanisch getrennt.
2.3 Phasenfolge---Überwachung
Die Phasenfolge der anliegenden Leistungsspannung wird mitHilfe der Spannungsnulldurchgangs---Messung überwachtund die Richtung des Drehfeldes angezeigt.
Die Phasenfolge kann auf Wunsch korrigiert werden.
Als Parameter ist einstellbar (Defaultwert in Klammern)
--- Drehfeld tauschen ja/nein (nein)
2.4 Netzfrequenz---Überwachung
Die Frequenz der anliegenden Leistungsspannung wird mitHilfe der Spannungsnulldurchgangs---Messung überwacht. Eswird geprüft, ob ein intaktes Dreiphasensystem vorhanden ist,d. h. ob die Spannungsnulldurchgänge der 3 Phasen in derrichtigen Reihenfolge und in einem der Netzfrequenz entspre-chenden zeitlichen Abstand kommen. Im Fehlerfall erfolgt eineMeldung.
2.5 Elektronikspannungs---Versorgung und -Überwachung
Die Elektronikspannung wird aus der Leistungsspannung ge-bildet. Ohne Leistungsspannung ist der Antrieb nicht verfahr-bar.
Bei Ausfall der Elektronikspannung wird der Antrieb abge-schaltet. Vom Feldbuskoppler wird die Störung erfaßt und ge-meldet; diese Meldung wird um die Zeit einer möglichenSchaltanlagen---Umschaltung (≤5 s) verzögert.
2.6 Leistungsspannungs---Überwachung
Die Phase 1 wird mit der Strommessung bzw. der Spannungs-nulldurchgangs---Messung überwacht. Die Leistungsspan-nung der Phasen 2 und 3 wird mit der Elektronikspannungüberwacht. Bereits bei Ausfall einer Phase wird der Antriebausgeschaltet und eine Fehlermeldung ausgegeben. Um beieiner vorübergehenden Sammelschienenstörung unnötigeMeldungen zu vermeiden, wird die Meldung verzögert, wenndie Überwachung bei ausgeschaltetem Antrieb anspricht.
2.7 Leistungsfaktor---Ermittlung (Option)
Der Leistungsfaktor wird aus der Strommessung und derSpannungsnulldurchgangs---Messung errechnet.
Die Meßunsicherheit bei cos φ = 0,5 beträgt ±5 %.
2.8 Fehlerstrom---Überwachung (Option)
Fehlerwechselströme werden unmittelbar nach den Leistungs-spannungs---Anschlußstecker mit einem Summenstromwand-ler gemessen. Der Wandler ist elektrisch vor den Thyristorenangeordnet.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Fehlerstromauslösung ja / nein (nein)--- Auslösung bei Fehlerstrom- ja / nein (nein)sensorfehler
--- Fehlerstrom Meldegrenze 0,05 bis 2,5 A (0,05 A)--- Fehlerstrom Auslösegrenze 0,05 bis 2,5 A (0,1 A)--- Fehlerstromsensor vorhanden ja / nein (nein)
Das Erreichen der Meldegrenze wird gemeldet.
Bei Erreichen der Auslösegrenze wird gemeldet und, sofernder Parameter entsprechend eingestellt ist, der Motor ausge-schaltet.
Während der Motorstartzeit werden die Meldungen unter-drückt.
Der Fehlerstromsensor wird zyklisch über eine Hilfswicklunggeprüft. Bei Ansprechen der Überwachung wird eine Meldunggebildet und, sofern der Parameter entsprechend eingestelltist, der Motor ausgeschaltet.
2.9 Kühlkörpertemperatur---Überwachung
Die Temperatur des Kühlkörpers wird mittels NTC---Meßfühlerüberwacht.
Bei Überschreiten des Grenzwertes von 84 C wird der Motorabgeschaltet und eine Fehlermeldung ausgegeben.
2.10 Motortemperatur---Erfassung
Die Temperatur in der Motorwicklung wird durch drei in Reihegeschaltete Kaltleiter (PTC-Meßfühler) in der Motorwicklung er-faßt. Bei Ansprechen des Temperatur---Grenzwertes wird derMotor ausgeschaltet und eine Fehlermeldung ausgegeben.
PROPOS
5
2.11 Stellweg---Erfassung
Der Stellweg wird analog erfaßt.
Die Einstellung des Stellwegs und der Parameter erfolgtselbsttätig bei der automatischen Inbetriebnahme. Diese istderart ausgelegt, daß mechanisch einzustellende Endlagen-schalter nicht benötigt werden. Die Stellung wird über ihrengesamten Bereich kontinuierlich erfaßt.
Ist eine automatische Inbetriebnahme wegen fehlender dreh-momentabhängiger Abschaltung in Richtung ZU nicht mög-lich, ist eine Hand--- Inbetriebnahme mit der Diagnose---Stationdurchzuführen.
2.12 Drehmoment---Erfassung
Beim intelligenten Stell- und Regelantrieb PROPOS entfallendie Drehmomentschalter.
Das Drehmoment wird analog mit Vorzeichen erfaßt.
Für die Einstellung der Abschaltmomente in End- und Zwi-schenstellungen werden die Armaturendaten im elektroni-schen Typenschild herangezogen. Sind diese Daten nicht ein-getragen, können die Abschaltwerte auch in der Diagnose-Station eingestellt werden über die Parameter
--- Abschaltmoment Betrieb ZU 0 bis 100 %
--- Abschaltmoment Betrieb AUF 0 bis 100 %
--- Abschaltungsart der Armatur Endlage oderfür Betrieb AUF bzw. ZU Drehmoment
--- Startmoment automatische 0 bis 100 %Inbetriebnahme ZU
--- Startmoment automatische 0 bis 100 %Inbetriebnahme AUF
--- Weg
--- Abschaltungsart der Armatur Endlage oderfür Inbetriebnahme AUF bzw. ZU Drehmoment
Dabei sind 100 % das Nenndrehmoment des intelligentenStell- und Regelantriebs PROPOS und damit das maximal ein-stellbare Abschaltmoment. Die Einstellungen sind antriebsab-hängig und die Einstellwerte sind der Spalte “Drehmomentbe-reich” in Tabelle 1 zu entnehmen.
Das Abschalten über Drehmoment in Zwischenstellung wirdgemeldet.
Aus Drehmoment und Stellweg werden Drehmomentkurvenüber dem Stellweg für beide Drehrichtungen abgespeichert:
--- Soll ---Kurve Werk--- Soll ---Kurve Anlage kalt--- Soll ---Kurve Anlage warm--- Ist---Kurve (zuletzt gefahrene Kurve)
Über eine Eingabe in der Diagnose---Station ist es möglich, jeKurve Betriebswerte als Zusatzinformation mit abzuspeichern.
Die Drehmomentkurven können über die Diagnose---Stationaufgerufen, untereinander verglichen und diagnostiziert wer-den.
Bis zu 10 Kurven können in der Diagnose---Station in einemArchiv abgelegt werden.
Das Überschreiten eines Toleranzbandes der zuletzt gefahre-nen Kurve gegenüber einer festgelegten Soll ---Kurve wirdgemeldet.
2.13 Drehrichtung Armatur
Für die Armaturenschließrichtung ZU kann eingestellt werden,ob diese rechts- oder linksdrehend ist.
Als Parameter ist einstellbar (Defaultwert in Klammern)
--- Armaturendrehrichtung ZU links-/rechtsdrehend(rechtsdrehend)
Achtung:
Das Ändern der Armaturendrehrichtung darf nur in Verbindungmit einer Neu--- Inbetriebnahme erfolgen.
3 Externe Sensorik und Überwachung
3.1 Universaleingang (Option)
Der Universaleingang ist standardmäßig intern mit einem Tem-peraturfühler PT100 beschaltet, der die Elektroniktemperaturerfaßt.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Temperaturmessung ja / nein (ja)--- Meldegrenze 70 bis 150 C (70 C)--- Auslösegrenze 70 bis 150 C (85 C)
Das Erreichen der Meldegrenze wird gemeldet.
Bei Erreichen der Auslösegrenze wird der Motor abgeschaltetund gemeldet.
Die Elektroniktemperatur kann in der Diagnose---Station ange-zeigt werden.
Durch Umstecken interner Steckbrücken kann ein externerGeber aufgeschaltet werden, wenn keine Elektroniktempe-raturmessung benötigt wird.
Die Konfiguration des Universaleingangs erfolgt dann mit demPROCONTROL P--- Funktionsbaustein EP06.
Am Universaleingang sind extern folgende Meßfühler---Typenanschließbar:
--- PT100---Thermowiderstand in Vierleitertechnik (Typ 150 ˚C)--- Kaltleiter---Fühler (Thermistor) nach DIN 44080 bzw. IEC34---11---2
--- Kontakteingang ohne Überwachung--- 4 bis 20 mA Meßumformer (2---Leiter)--- 4 bis 20 mA Meßumformer (4---Leiter)
3.2 Kombi---Eingang für analoge Messungen 4 bis 20 mAoder Binärsignale (Option)
Es sind zwei Kombi---Eingänge vorhanden.
Die Eingänge sind wahlweise als Binäreingang 24 V oder Ana-logeingang 4 bis 20 mA konfigurierbar.
Die Konfiguration dieser Prozeßschnittstelle erfolgt mit demPROCONTROL P---Funktionsbaustein EP06.
PROPOS
6
4 Funktionen und Überwachungen
4.1 Thermischer Überlastschutz
Es wird zyklisch errechnet, ob eine thermische Überlastungdes Antriebs vorliegt. Dafür wird ein rechnerisches Modell ent-sprechend der Strom---Zeit ---Kennlinie eines Bimetall ---Aus-lösegerätes zugrundegelegt. Der Bemessungsstrom desMotors dient dabei als Bezugsgröße.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Überlastabschaltung ein/aus (ein)--- Thermisches Gedächtnis ein/aus (ein)--- T6---Auslöseklasse *) 5 bis 40 (10)--- Wiedereinschaltsperrzeit 0 bis 9990 (100)--- Thermischer Schutz ja/nein (nein)mit Leistungsfaktor
*) Nach DIN VDE 660 Teil 102 und 105
Auslöseklasse
Als Eingabegröße für die Erwärmungsberechnung wird derEffektivwert des gemessenen Stroms herangezogen. Der ther-mische Charakter des Motors ist durch die eingestellteT6---Auslöseklasse festgelegt.
Überlastabschaltung
Es kann gewählt werden, ob bei einer errechneten Überlastein Abschalten des Motors erfolgen soll. Im Überlastfall wirdeine Fehlermeldung ausgegeben. Die Abschaltung bei thermi-scher Überlast muß an der Diagnose---Station quittiert werden.
Thermisches Gedächtnis
Die errechnete Motorerwärmung wird bei einer Unterbrechungder Elektronikversorgung (z. B. Ausfall der Leistungsspan-nung) in einen spannungsausfallsicheren Speicher abgelegt(thermisches Gedächtnis). Bei Wiederkehr der Spannung giltdieser Wärmewert, wenn der Parameter entsprechend gesetztist. Das Rücksetzen des Parameters löscht das thermischeGedächtnis.
4.2 Stromgrenzwert ---Überwachungund Strombegrenzungs---Regelung (Option)
Der Motorstrom wird auf max. zulässige Grenzen überwachtund zwar während der Motorstartzeit auf die Motorstrom-grenze Anlauf und nach der Motorstartzeit auf die Motorstrom-grenze Betrieb.
Das Überschreiten der Grenzwerte wird gemeldet.
Wenn der Parameter Strombegrenzungsregelung ’ein’ gesetztist, werden die eingestellten Motorstromgrenzen durch eineStrombegrenzungsregelung nicht überschritten.
Als Parameter für die Motorstromgrenze sind einstellbar(Defaultwert in Klammern)
--- Anlauf 100 --- 800 % (730 %)--- Betrieb 100 --- 800 % (450 %)--- Strombegrenzungsregelung ein/aus (aus)
Dabei sind 100 % der eingestellte Bemessungsstrom.
4.3 Motorbremse
Der Motor kann nach dem Gleichstrombremsprinzip abge-bremst werden.
Hinweis: Nicht für Steuerantrieb geeignet!
Bei gewählter Bremsfunktion wird nach dem Ausschalten desMotors eine leistungselektronisch aus dem Netz erzeugteGleichspannung an zwei Anschlüsse der Motorwicklung ge-legt. Die Bremsstärke wird durch die Phasenanschnittsteue-rung eingestellt.
Wenn nach der eingestellten Bremszeit eine weitere Netz-periode verstrichen ist, so ist der Bremsvorgang abgeschlos-sen. Danach kann ein Wiedereinschalten erfolgen.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Bremsfunktion ein / aus (aus)--- Bremsstärke Rechtslauf 35 --- 50 % (50 %)--- Bremsstärke Linkslauf 35 --- 50 % (50 %)--- Bremszeit Rechtslauf 0,01 --- 30 s (10 s)--- Bremszeit Linkslauf 0,01 --- 30 s (10 s)
4.4 Sanftanlauf, Sanftauslauf
Zum Sanftschalten kann die Motorspannung in einer annä-hernd linearen Rampe mit einem einstellbaren Rampenoffsetvariiert werden.
Die Rampenzeiten für An- und Auslauf können voneinanderunabhängig variiert werden.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Sanftanlauffunktion ja/nein (nein)--- Sanftauslauffunktion ja/nein (nein)--- Rampen Offset 35 bis 100 % (35 %)--- Rampenzeit Motoranlauf 0,01 bis 1 s (1 s)--- Rampenzeit Motorauslauf 0,01 bis 1 s (1 s)
Bei Ausschaltvorgängen ist die Sanftauslauffunktion in folgen-den Fällen nicht aktiviert:
--- Abschaltung über PROPOS---Schutz
--- Bremsfunktion ist aktiv--- Drehmoment oder Endlage aktiv.
4.5 Blockierschutz
Parallel zum thermischen Überlastschutz läuft die Blockier-schutzfunktion. Wenn die eingestellte Blockierstromgrenzeüberschritten ist, wird die Blockierzeit gestartet. Sobald dieBlockierstromgrenze wieder unterschritten wird, wird die Zeitzurückgesetzt. Bleibt der Motorstrom während der gesamtenBlockierzeit über der Blockierstromgrenze, so wird eine Fehler-meldung ausgegeben und der Motor ausgeschaltet.
Der Blockierschutz ist während der Motorstartzeit unterdrückt.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Blockierschutz ein/aus (aus)--- Blockierstromgrenze 120 bis 800 % (730 %)--- Blockierzeit 1 bis 50 s (10 s)
Dabei sind 100 % der eingestellte Bemessungsstrom.

PROPOS
7
4.6 Unterlast
Das Unterschreiten der durch die Sensorik erfaßten Drehmo-mente unter einstellbare Grenzwerte wird gemeldet.
Das Unterlastgrenzmoment kann nicht kleiner als das Leerlauf-grenzmoment eingestellt werden.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Unterlastprüfung ein/aus (aus)--- Leerlaufgrenzmoment 0 bis 100 % (0 %)--- Unterlastgrenzmoment 0 bis 100 % (0 %)
4.7 Schieflast (Option)
Es wird überwacht, ob einer der drei Phasenströme von denbeiden anderen um mehr als den eingestellten Prozentsatzdes Bemessungsstromes abweicht.
Die Schieflast---Überwachung erfolgt im Stillstand.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Abschaltung bei Schieflast ein/aus (ein)--- Meldegrenze 0 bis 100 % (10 %)--- Auslösegrenze 0 bis 100 % (20 %)
Das Erreichen der Meldegrenze wird gemeldet.
Beim Erreichen der Auslösegrenze wird gemeldet und sofernder Parameter entsprechend eingestellt ist, das Einschaltendes Motors verhindert.
Die Schieflast---Überwachung wird während der Startzeit un-terdrückt.
Die Schieflast---Abschaltung muß an der Diagnose---Stationquittiert werden.
4.8 Motorstart ---Überwachung
Beim Starten des Motors wird überwacht, ob der Anlauf inner-halb der Startzeit erfolgt. Der Parameter kann für beide Dreh-richtungen getrennt eingestellt werden.
Bis zum Ablauf der Startzeit werden folgende Störungsmel-dungen unterdrückt:
FehlerstrommeldungBlockiermeldungMotorschieflastmeldung
Erfolgt der Motoranlauf nicht innerhalb der eingestellten Start-zeit, so wird eine Meldung ausgegeben. Ein Motoranlauf giltdann als erfolgt, wenn sich der Motorstrom innerhalb der ein-gestellten Startzeit selbsttätig unterhalb der zulässigen Dauer-stromgrenze (1,05 x In) einstellt.
Als Parameter für die Motorstartzeit sind einstellbar(Defaultwert in Klammern)
--- Rechtslauf 0,1 bis 100 s (10 s)--- Linkslauf 0,1 bis 100 s (10 s)
4.9 Schalthäufigkeitsdiagnose
Mit der Schalthäufigkeitsdiagnose wird überwacht, ob inner-halb eines bestimmten Zeitintervalles eine bestimmte Anzahlvon Schalthandlungen überschritten wurde.
Wird der Grenzwert überschritten, wird gemeldet und einSignal zur Meldung in PROCONTROL P bereitgestellt, soferndie Überwachung eingeschaltet ist .
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Schalthäufigkeitsüberwachung ein/aus (aus)--- Maximale Schalthäufigkeit 0 bis 65535 (1200)--- Zeitintervall für maximale 0 bis 180 min (60 min)Schalthäufigkeit
4.10 Thyristortest
Aufgrund der fünf Thyristormodule ist es möglich, den Motorauch bei einem durchlegierten Thyristormodul stromlos zuschalten.
Es werden zyklische Tests durchgeführt, die bei angeschlosse-ner Last die Schaltfähigkeit der Thyristormodule überprüfen.Die Tests werden bei stehendem Motor durchgeführt.
Während der Initialisierungsphase, z. B. bei Spannungszu-schalten der Elektronik, werden diese Tests immer durch-laufen.
Der Thyristortest ist abschaltbar.
Als Parameter ist einstellbar (Defaultwert in Klammern)
--- Thyristortest ein/aus (ein)
5 Grundeinstellungs---Parameter
Neben dem Bemessungsstrom (siehe Strommessung) mußfolgender Grundeinstellungs---Parameter eingestellt werden(Defaultwert in Klammern):
--- Gerätevariante PROPOS (0) *)MUSS---Eintrag
*) 0 bedeutet: nicht parametriert
Fehlt ein MUSS---Parameter, so sind alle Schalthandlungen fürdas Gerät gesperrt.
Außerdem ist als Grundeinstellungs---Parameter einzustellen(Defaultwert in Klammern):
--- Netzfrequenz 50/60 Hz (50 Hz)
PROPOS
8
6 Wartungsplanung
Durch die Auswertung antriebsspezifischer Daten (Aus-legungsdaten) ist mit der Diagnose---Station eine zustands-orientierte Wartung möglich.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Schaltspiele Auslegung 1 bis 16*106 (100.000)--- Schaltspiele Wartungsintervall 1 bis 16*106 (10.000)
Im Antrieb werden dazu die folgenden aktuellen Wartungs-daten aufgezeichnet:
--- Schaltspiele ist--- Schaltspiele seit letzter Wartung *)--- Schaltspiele der letzten Stunde--- Drehmomentabschaltungen gesamt--- Drehmomentabschaltungen seit letzter Wartung *)
Weiterhin ist auch eine zeitorientierte Wartungsplanung mög-lich.
Als Parameter sind einstellbar (Defaultwert in Klammern)
--- Betriebsstunden Auslegung 1 bis 16*106 h (10.000 h)--- Betriebsstunden 1 bis 16*106 h (1.000 h)Wartungsintervall
--- Wartungsintervall--- Nächste Wartung geplant--- Startdatum Armatur--- Startdatum Antrieb--- Startdatum Getriebe--- Startdatum Elektronik--- Letzte Wartung
Im Antrieb werden dazu die folgenden aktuellen Wartungs-daten aufgezeichnet:
--- Betriebsstunden ist--- Betriebsstunden seit letzter Wartung *)
Das Überschreiten einstellbarer Grenzen wird gemeldet.
*) nach erfolgter Wartung können diese Daten durch dieDiagnose---Station auf Null gesetzt werden.
Weiterhin können im Intelligenten Stell- und Regelantrieb PRO-POS und in der Datenbank der Diagnose---Station Armaturen-daten, Antriebsdaten und Getriebedaten (elektronischesTypenschild) abgelegt werden.
7 Vorort---Eingriffe (Option)
Außer dem Parametrieren und der Anzeige über die zentraleDiagnose---Station sind auch Vorort---Eingriffe möglich.
Diese Vorort---Eingriffe sind nur möglich mit dem Anschlußeiner lokalen Diagnose---Station an der seriellen Schnittstelle(Option).
Sie sind grundsätzlich paßwortgeschützt und besitzen Prioritätgegenüber Eingriffen über den Feldbus (Warte, Gruppenleit-ebene oder zentrale Diagnose---Station).
Jeder Eingriff mit der Vorort---Diagnose---Station wird über denBus in PROCONTROL P gemeldet.
Es können zwei Arten von Vorort---Bedienungen vorgenom-men werden:
Vorort Parametrieren
Nach dem Anmelden zum Parametrieren werden Schaltbe-fehle, Prozeßsignale und Parameteränderungen über Feldbusignoriert und die Meldung Eingriff Vorort Parametrieren aktivgesetzt.
Das Quittieren der Meldung ist nur mit der zentralen Diagnose-Station möglich.
Vorort Fahren
Bei Anmeldung zum Vorort---Fahren werden Schaltbefehle,Prozeßsignale und Parameteränderungen über Feldbus igno-riert und die Meldung Eingriff Vorort Fahren aktiv gesetzt.
Weitere Vorort---Bedienungen sind über das Handrad und dasoptional vorhandene Bedien- und Anzeige---Terminal (BAT)möglich. Beides wird auf der Diagnose---Station und in PRO-CONTROL P gemeldet. Ist der Eingriff über das Handrad nichtzulässig, so ist es mechanisch zu verriegeln.
8 Weitere externe Schnittstellen
8.1 Serielle Schnittstelle (Option)
An die serielle Schnittstelle kann eine örtliche Diagnose-Stationangeschlossen werden.
8.2 PROCONTROL P Feldbusanschluß
Der intelligente Stell- und Regelantrieb PROPOS kann überden Feldbus einkanalig oder zweikanalig (redundant) mit demPROCONTROL P---System kommunizieren.
Die über den Bus empfangenen Telegramme werden von demGerät anhand ihrer Prüfzeichen auf fehlerfreie Übertragunggeprüft.
Die vom Gerät zum Bus gesandten Telegramme werden mitPrüfzeichen versehen. Hierdurch ist eine fehlerfreie Übertra-gung gewährleistet.
Das Anwenderprogramm wird auf einem nichtflüchtigen Spei-cher (Flash---PROM) abgelegt. Das Laden und Ändern desAnwenderprogrammes erfolgt vom PDAS aus über den Bus.
Das Gerät ist betriebsbereit, wenn die Leistungsspannunganliegt, die Feldbusadresse eingestellt ist und ein gültigesAnwenderprogramm geladen ist.
8.3 Feldbusadresse
Die Adresse des Antriebes am Feldbus wird über Verbindun-gen am Kompaktsteckverbinder des Antriebes eingestellt.Damit wird die Adresse abhängig vom Einbauort vergeben.Bei einem Ersetzen des Antriebes wird damit sichergestellt,daß der Antrieb die richtigen Prozeßinformationen erhält.
Es können die Adressen 1 ... 63 eingestellt werden. Die Adres-sen 0 und 64 sind für die zugehörigen Koppelgeräte reserviertund können durch die anzuschließenden Geräte nicht belegtwerden.
PROPOS
9
8.4 Leistungsspannungsanschluß
Der intelligente Stell- und Regelantrieb erhält die Leistungsein-speisung über den Kompaktsteckverbinder aus einem Siche-rungsabgang. Eine Schaltanlage (mit Leistungssteller) ist nichterforderlich.
Neben der Leistungseinspeisung ist keine weitere Stromver-sorgung erforderlich. Im internen Netzgerät werden die be-nötigten Elektronikspannungen gebildet.
Der Antrieb ist wartungsfrei. Eine Signalisierung vor Ort istnicht erforderlich.
9 PROCONTROL P---Verarbeitungsteil
9.1 Verarbeitung
Zur Verarbeitung der internen Steuersignale, der externenSensorsignale und der vom Bus kommenden Signale verfügtder Antrieb über einen 32 Bit---Mikroprozessor, der über einengeräteinternen Bus mit folgenden Speicherbereichen zusam-menarbeitet:
Inhalt Speicher-medium
Betriebsprogramm Flash---PROM
Funktionsbausteine Flash---PROM
Anwenderprogramm(Struktur-, Adreß- und Simulations---Liste)
Flash---PROM
Vergangenheitswerte RAM
Aktuelle Geräteeingangs- und ---ausgangs-signale (Verkehrsspeicher)
RAM
Das Betriebsprogramm befähigt den Mikroprozessor, denelementaren Betrieb des Gerätes auszuführen.
Der Speicher für die Funktionsbausteine enthält vorgefertigteProgramme für die Realisierung der verschiedenen Funktio-nen.
Sämtliche Funktionsbausteine mit ihren Ein- und Ausgängenkönnen durch den Anwender über das Programmier-,Diagnose- und Anzeige---System (PDAS) aufgerufen werden.
Der Speicher für das Anwenderprogramm enthält Angabendarüber:
--- wie die Funktionsbausteine untereinander verknüpft sind,--- welche Geräteein- und ---ausgänge den Ein- und Ausgän-gen der Funktionsbausteine zugeordnet sind,
--- welche Festwerte den einzelnen Eingängen der Funktions-bausteine vorgegeben sind,
--- welche Parameter den einzelnen Eingängen der Funktions-bausteine vorgegeben sind,
--- welche Anlagensignale den Geräteein- und ---ausgängenzugeordnet sind,
--- welche Funktionsbausteine die Prozeßschnittstellen bedie-nen,
--- welche Funktionsergebniswerte, Geräteeingangs- und---ausgangssignale simuliert sind.
Diese Angaben werden anlagenspezifisch durch den Anwen-der festgelegt.
Das komplette Anwenderprogramm wird in ein Flash---PROMabgelegt.
Einstellwerte können vom Anwender an den entsprechendenFunktionsbaustein---Eingängen direkt als Wert (Festwert) oderals Parameter vorgegeben werden.
Festwerte und Parameter können jederzeit während desBetriebes (on--- line) geändert werden. Dabei werden sie imFlash---PROM geändert und gespeichert.
Über den Speicher für die Geräteeingangs- und ---ausgangs-signale läuft der Informationsaustausch des Gerätes mit demBus---System. Er dient zur Zwischenspeicherung der Signale.
Am Funktionsbaustein ’Eingabe analoge und binäre Prozeß-meldungen EP06’ können alle internen und externen Sensor-signale für PROCONTROL P aktiviert werden.
Die Befehlsausgabe an den Leistungsteil erfolgt über denFunktionsbaustein ’Ausgabe binäre Prozeßmeldungen AP06’.
9.2 Strukturierung
Bei der Strukturierung werden den neutralen Ein- und Ausgän-gen der einzelnen Funktionsbausteine Verknüpfungen zuge-wiesen. Eingänge an Funktionsbausteinen können mit einemGeräteeingang, einem Ausgang eines anderen Funktionsbau-steins auf dem Gerät (Funktionsergebniswert) oder mit Fest-werten und (Struktur-) Parametern belegt werden. Ausgängevon Funktionsbausteinen können mit Geräteausgängen undmit Funktionsbausteinen auf dem Gerät verknüpft werden.
Bei der Strukturierung sind folgende Grenzwerte des Geräteszu beachten:
--- max. Anzahl Geräteeingänge 128--- max. Anzahl simulierbarer Signale 32--- max. Anzahl Geräteausgänge 64--- max. Anzahl simulierbare Geräteausgänge 32--- max. Anzahl Funktionsergebniswerte 255--- max. Anzahl Zeitwerke 32--- max. Anzahl (Struktur-) Parameter 32--- max. Anzahl Zeilen in Strukturliste 1024--- Länge Vergangenheitswertliste (Byte) 512--- Auslegung Verkehrsspeicher (siehe “Adressierung”)
Unter einer Zeile wird dabei eine Eingabemöglichkeit beimPDAS verstanden.
Die genaue Vorgehensweise bei der Strukturierung der Funkti-onsbausteine ist aus den Funktionsbausteinbeschreibungenzu ersehen.
9.3 Adressierung
Allgemeines
Der Signalaustausch des Gerätes mit dem PROCONTROL-Bus---System über den Feldbus bzw. dem zugehörigenKoppelgerät erfolgt durch einen Verkehrsspeicher. In diesemVerkehrsspeicher werden ankommende Telegramme, die dasGerät empfangen soll, und Funktionsergebniswerte, die dasGerät verlassen sollen, zwischengespeichert.

PROPOS
10
Der Verkehrsspeicher verfügt hierzu über Senderegister für zusendende Telegramme und Empfangsregister für zu emp-fangende Telegramme.
Anzahl Empfangsregister 16 (maximal 32)Anzahl Senderegister 6 (maximal 16)
Dabei sind folgende Grenzwerte für einen Feldbus zu beach-ten:
Empfangstelegramme maximal 1023Sendetelegramme maximal 400
Die Angaben des Anwenders erfolgen in Form von Adreß-listen.
Die Zuordnung der Geräteeingangs- und ---ausgangssignalezu den Registern des Verkehrsspeichers wird über Angabendes Anwenders durch das PDAS festgelegt.
Adreßliste für Geräteeingänge
In der Adreßliste für Geräteeingänge wird jedem Geräteein-gang die PROCONTROL---Sendeortsadresse oder die Prozeß-schnittstelle des zu empfangenden Signals zugeordnet.
Die Adreßliste für Eingänge wird durch das PDAS in zwei gerä-teinterne Listen übersetzt, und zwar in die ”Bus---Adreßliste”und die ”Zuordnungsliste Geräteeingänge”.
Die ’Bus---Adreßliste’ verbleibt im Koppelgerät des zugehöri-gen Feldbus. Jedes Gerät bekommt alle für den Feldbus pro-jektierten Empfangsregister übertragen. Die ’ZuordnungslisteGeräteeingänge’ des Antriebes legt die Auswahl der Emp-fangsregister fest.
Bei Geräteeingängen, die ihr Signal über den Bus erhalten,erfolgt die Adressierung über die Zuweisung der Sendeorts-adresse an EGn, z. B.:
Eingang Adresse
EG1 1, 32, 24, 8, 7
Bit Nr.Register Nr.Geräte Nr.Station Nr.System Nr.
(0 --- 15)(0 --- 1022)(0 --- 58)(1 --- 249)(0 --- 3)
Bei Geräteeingängen, die ihr Signal von der Prozeß---Bedien-station erhalten, erfolgt die Adressierung über die Zuweisung Lan EGn, z. B.:
Eingang Adresse
EG1 L
Zielortstelegramm von PBS
Adreßliste für Geräteausgänge zum Bus
In der Adreßliste für Geräteausgänge wird für jedes Signal,das das Gerät verlassen soll, ein Senderegister festgelegt undbei Binärsignalen zusätzlich ein Sendebit, z. B.:
Ausgang Adresse
AG1 1, 5
Bit Nr.Register Nr.
(1 --- 15)(0 --- 199)
0,
Offset zur Geräte- (0 --- 1)adresse des Feld-bus-Kopplers
Da das Feldbuskoppelgerät am PROCONTROL---Stationsbuszwei Geräteadressen (n und n+1) belegt, legt der Offset zurGeräteadresse fest, unter welcher Adresse das Register amPROCONTROL---Bus übertragen wird. Bei Offset = 0 erfolgtdie Übertragung mit der Geräteadresse n, bei Offset = 1 mitder Geräteadresse n+1.
Für die vollständige Bildung der PROCONTROL---Adresse istdie System-, Stations- und Geräteadresse durch den Steck-platz des Feldbus-Koppelgerätes festgelegt.
9.4 Parameterliste (Struktur)
Die Parameterliste enthält bis zu 32 Parameter für Funktions-bausteine. Parameterwerte können jederzeit on--- line mit demPDAS geändert werden.
9.5 Simulation
Über das PDAS können maximal 32 Gerätesignale (Funktions-ergebniswerte, Geräteeingänge und ---ausgänge) mit konstan-ten Werten überschrieben (”simuliert”) werden. Simulations-werte können jederzeit on--- line mit dem PDAS geändertwerden. Bei der Aufhebung einer Simulation über das PDASwird ein Simulationsdatensatz gelöscht und das Gerät arbeitetwieder mit den vom Bus empfangenen Daten bzw. den imGerät gebildeten Werten.
9.6 Ereignisbildung
Alle 50 ms liest das Feldbuskoppelgerät die Ereignisse auf denFeldbusgeräten aus und sendet die neuen Werte per Ereignisauf den PROCONTROL---Bus.
Das Gerät erkennt als Ereignis:
--- Änderung eines Binärwertes--- Änderung eines Analogwertes um einen fest eingestelltenSchwellwert von 0,39 % und Ablauf einer Zeitsperre von200 ms seit der letzten Übertragung (zyklisch oder perEreignis).
PROPOS
11
9.7 Störungsbitauswertung, Empfangsüberwachung
Die über den Bus empfangenen Telegramme können auf derBit ---Position 0 mit einem Störungskennzeichen versehen sein.Dieses Störungskennzeichen wird vom Sendegerät auf Grundvon Plausibilitätskontrollen generiert und bei Vorliegen von be-stimmten Störungen auf “1” gesetzt (siehe hierzu Geräte- bzw.Funktionsbaustein---Beschreibungen).
Um Fehler bei der Signalübertragung erkennen zu können,besitzt das Gerät außerdem eine Überwachung auf zyklischeErneuerung der Eingangstelegramme. Wird ein Signal für einebestimmte Zeit nicht mehr erneuert (z.B. durch Ausfall desSendegerätes), so wird im zugeordneten Empfangsregisterdes Verkehrsspeichers das Bit der Position 0 auf ”1” gesetzt.Gleichzeitig werden bei Binärwerttelegrammen alle Binärwerteauf “0” gesetzt. Bei Analogwerten bleibt der alte Wert erhalten.
Ein gesetztes Störungsbit hat im Gerät nicht automatisch eineReaktion zur Folge. Soll das Störungsbit eines Telegrammesausgewertet werden, so muß dies bei der Strukturierung be-rücksichtigt werden.
Störungsbits von empfangenen Telegrammen können nur ge-räteintern verwendet werden. Sie werden nicht in zu sendendeTelegramme übernommen.
Weitere Informationen zur Störungsbitauswertung sind denverschiedenen Funktionsbaustein---Beschreibungen zu ent-nehmen.
9.8 Diagnose und Meldefunktionen
Im Verarbeitungsteil des Gerätes werden die empfangenenTelegramme und die Bildung der zu sendenden Telegrammesowie die interne Signalverarbeitung auf Fehlerfreiheit über-wacht. Weiterhin werden Eigendiagnosen durchgeführt.
Im Störungsfall wird die Fehlerart im Diagnoseregister abge-legt.
Der Inhalt des Diagnoseregisters ist in Bild 1 dargestellt.
Das Feldbuskoppelgerät liest das Diagnoseregister zyklischaus und gibt diese Meldungen an das PROCONTROL-Systemweiter.
Falls erforderlich, kann eine weiterführende Diagnose zu ein-zelnen Funktionen mit Hilfe der Diagnose---Station durchge-führt werden.
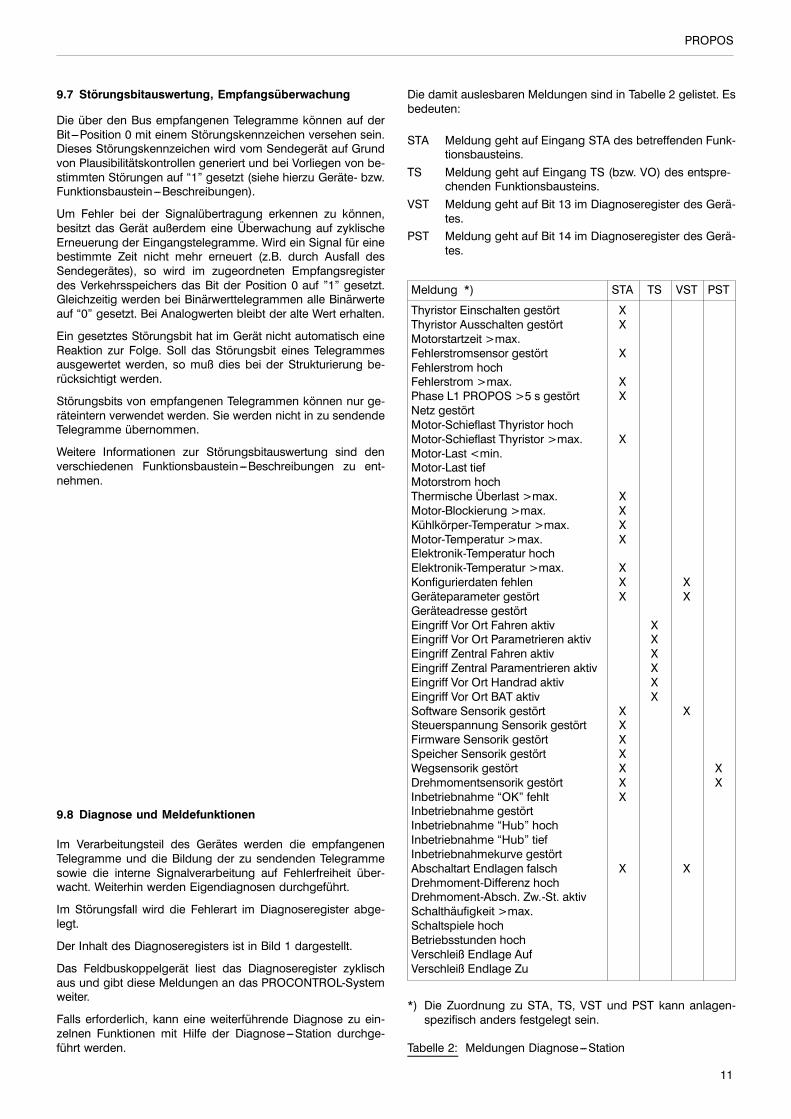
Die damit auslesbaren Meldungen sind in Tabelle 2 gelistet. Esbedeuten:
STA Meldung geht auf Eingang STA des betreffenden Funk-tionsbausteins.
TS Meldung geht auf Eingang TS (bzw. VO) des entspre-chenden Funktionsbausteins.
VST Meldung geht auf Bit 13 im Diagnoseregister des Gerä-tes.
PST Meldung geht auf Bit 14 im Diagnoseregister des Gerä-tes.
Meldung *) STA TS VST PST
Thyristor Einschalten gestörtThyristor Ausschalten gestörtMotorstartzeit >max.Fehlerstromsensor gestörtFehlerstrom hochFehlerstrom >max.Phase L1 PROPOS >5 s gestörtNetz gestörtMotor-Schieflast Thyristor hochMotor-Schieflast Thyristor >max.Motor-Last <min.Motor-Last tiefMotorstrom hochThermische Überlast >max.Motor-Blockierung >max.Kühlkörper-Temperatur >max.Motor-Temperatur >max.Elektronik-Temperatur hochElektronik-Temperatur >max.Konfigurierdaten fehlenGeräteparameter gestörtGeräteadresse gestörtEingriff Vor Ort Fahren aktivEingriff Vor Ort Parametrieren aktivEingriff Zentral Fahren aktivEingriff Zentral Paramentrieren aktivEingriff Vor Ort Handrad aktivEingriff Vor Ort BAT aktivSoftware Sensorik gestörtSteuerspannung Sensorik gestörtFirmware Sensorik gestörtSpeicher Sensorik gestörtWegsensorik gestörtDrehmomentsensorik gestörtInbetriebnahme “OK” fehltInbetriebnahme gestörtInbetriebnahme “Hub” hochInbetriebnahme “Hub” tiefInbetriebnahmekurve gestörtAbschaltart Endlagen falschDrehmoment-Differenz hochDrehmoment-Absch. Zw.-St. aktivSchalthäufigkeit >max.Schaltspiele hochBetriebsstunden hochVerschleiß Endlage AufVerschleiß Endlage Zu
XX
X
XX
X
XXXX
XXX
XXXXXXX
X
XXXXXX
XX
X
X
XX
*) Die Zuordnung zu STA, TS, VST und PST kann anlagen-spezifisch anders festgelegt sein.
Tabelle 2: Meldungen Diagnose---Station

PROPOS
12
Bit1514131211109876543210
TypSSSS0000000SSS00
Parameter gestört *)Prozeßkanal gestört *)Verarbeitung gestört *)Prüfsummenfehler erkannt *)
*)
Diagnose-register 246
D = Dynamische Meldungen werden nach Senden des Diagnoseregisters gelöschtS = Statische Meldungen erlöschen selbsttätig nach Wegfall der Ansteuerung0 = nicht belegt
Empfangsüberwachung angesprochen *)Buskopplung gestörtEreignisbetrieb gestört *)
Diese Meldungen werden als Sammelmeldungen allerFeldbusteilnehmer im Feldbuskoppelgerät in dessenDiagnoseregister übernommen und durch die Melde-lampe ST dort signalisiert.
Bild 1: Diagnosemeldungen PROPOS
PROPOS
13
9.9 Gerätebetriebszustände
Initialisierung und Urladen mit Anwenderlisten
Die Initialisierung erfolgt durch Zuschalten der Betriebsspan-nung.
Durch die Initialisierung wird das Gerät in einen definiertenAnfangszustand gebracht.
Bei Erstinbetriebnahme des Gerätes steht kein Anwenderpro-gramm zur Verfügung, das Gerät meldet “Verarbeitunggestört”.
Zunächst ist das Anwenderprogramm vom PDAS über Bus indas RAM des Gerätes zu übertragen. Das PDAS prüft bei jederÜbertragung die Adresse zur Vermeidung falscher Listen. DasGerät prüft jede empfangene Liste auf Plausibilität.
Nun wird das komplette Anwenderprogramm vom Gerät indas Flash---PROM übertragen.
Danach ist das Gerät betriebsbereit.
Normalbetrieb
Das Gerät bearbeitet das im Flash---PROM abgelegte Anwen-derprogramm.
Im Normalbetrieb werden die über den Bus und die von derinternen Sensorik kommenden Signale nach den in der Struk-turliste festgelegten Angaben verarbeitet.
Abhängig davon werden Befehle an die interne Sensorik aus-gegeben und Rückmeldungen, die den Prozeßzustand kenn-zeichnen, über den Bus gesendet.
Änderung des Anwenderprogramms(Struktur-, Adreß-, Parameter- und Simulationsliste)
Anwenderprogramme (Struktur-, Adreß-, Parameter- undSimulationsliste) können vom Gerät in das PDAS übertragenoder aus der Datenbank übernommen werden. GeänderteAnwenderprogramme können wieder auf das Gerät über-tragen werden. Dabei kann wie folgt vorgegangen werden:
--- Das geänderte Anwenderprogramm wird mit dem PDAS insRAM des Gerätes übertragen.
--- Das Gerät prüft jede empfangene Liste auf Plausibilität.Danach werden die neuen Listen aktiviert und insspannungsausfallsichere Flash---PROM übertragen.
Änderung von Festwerten
Einzelne Festwerte in der Strukturliste können über das PDASon--- line geändert werden. Die Änderungen werden im Flash---PROM gespeichert.
Änderung von (Struktur-) Parametern
Einzelne Parameter in der Parameterliste können über dasPDAS on--- line geändert werden. Die Änderungen werden imFlash---PROM gespeichert.
Simulation
Über das PDAS können Gerätesignale vorgegeben und ge-löscht werden. Die Simulationsdaten werden im Flash---PROMgespeichert.
9.10 Gerätezykluszeit
Die Abarbeitung eines Anwenderprogramms erfolgt mit einerfesten Zykluszeit. Die Zykluszeit wird im FunktionsbausteinTXT2 am Anfang der Strukturliste vorgegeben. Die Geräte-zykluszeit ergibt sich aus Anzahl und Art der in der Struktur-liste eingetragenen Funktionsbausteine. Die fest vorgegebeneZykluszeit im Funktionsbaustein TXT2 ist eine Mindestzeit. Siegilt, wenn die sich aus der Abarbeitung der Strukturliste erge-bende Zeit kürzer ist. Die tatsächliche Zykluszeit ist im Register205 abgelegt und kann über das PDAS ausgelesen werden.Überschreitet die Zykluszeit im Register 205 die fest vorge-gebene Gerätezykluszeit im TXT2---Baustein, so ist diese zuerhöhen.
Um bei Einzelgrößen---Schrittreglern eine genauere Positionie-rung zu erreichen, muß die Stellzeit des Stellantriebs (von0---100 %) mindestens das 200fache der Gerätezykluszeitbetragen, also z. B. Stellzeit >10 s bei einer Zykluszeit von50 ms.
Zur Vermeidung größerer Zeitfehler in Funktionsbausteinen mitZeitwerteingängen, sollten für Zeitwerte kleiner als 10 s nurganzzahlige Vielfache der Gerätezykluszeit verwendet werden.
PROPOS
14
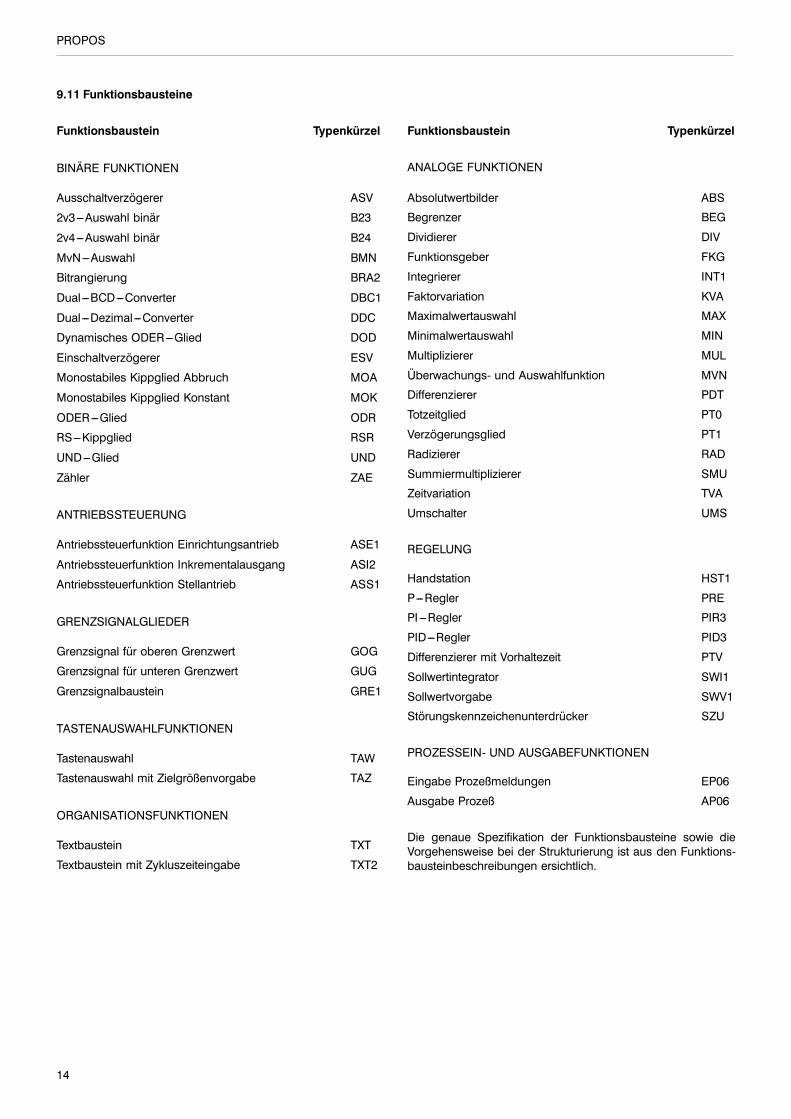
9.11 Funktionsbausteine
Funktionsbaustein Typenkürzel
BINÄRE FUNKTIONEN
Ausschaltverzögerer ASV
2v3---Auswahl binär B23
2v4---Auswahl binär B24
MvN---Auswahl BMN
Bitrangierung BRA2
Dual---BCD---Converter DBC1
Dual---Dezimal---Converter DDC
Dynamisches ODER---Glied DOD
Einschaltverzögerer ESV
Monostabiles Kippglied Abbruch MOA
Monostabiles Kippglied Konstant MOK
ODER---Glied ODR
RS---Kippglied RSR
UND---Glied UND
Zähler ZAE
ANTRIEBSSTEUERUNG
Antriebssteuerfunktion Einrichtungsantrieb ASE1
Antriebssteuerfunktion Inkrementalausgang ASI2
Antriebssteuerfunktion Stellantrieb ASS1
GRENZSIGNALGLIEDER
Grenzsignal für oberen Grenzwert GOG
Grenzsignal für unteren Grenzwert GUG
Grenzsignalbaustein GRE1
TASTENAUSWAHLFUNKTIONEN
Tastenauswahl TAW
Tastenauswahl mit Zielgrößenvorgabe TAZ
ORGANISATIONSFUNKTIONEN
Textbaustein TXT
Textbaustein mit Zykluszeiteingabe TXT2
Funktionsbaustein Typenkürzel
ANALOGE FUNKTIONEN
Absolutwertbilder ABS
Begrenzer BEG
Dividierer DIV
Funktionsgeber FKG
Integrierer INT1
Faktorvariation KVA
Maximalwertauswahl MAX
Minimalwertauswahl MIN
Multiplizierer MUL
Überwachungs- und Auswahlfunktion MVN
Differenzierer PDT
Totzeitglied PT0
Verzögerungsglied PT1
Radizierer RAD
Summiermultiplizierer SMU
Zeitvariation TVA
Umschalter UMS
REGELUNG
Handstation HST1
P---Regler PRE
PI ---Regler PIR3
PID---Regler PID3
Differenzierer mit Vorhaltezeit PTV
Sollwertintegrator SWI1
Sollwertvorgabe SWV1
Störungskennzeichenunterdrücker SZU
PROZESSEIN- UND AUSGABEFUNKTIONEN
Eingabe Prozeßmeldungen EP06
Ausgabe Prozeß AP06
Die genaue Spezifikation der Funktionsbausteine sowie dieVorgehensweise bei der Strukturierung ist aus den Funktions-bausteinbeschreibungen ersichtlich.

PROPOS
15
10 Funktionsschaltbild
E21
E22
E23
E24
Feldbusankopplung
Parallel/Seriell-
Wandlung
Feldbus-
adresse
Anwender-
funktionen
RAM
Betriebsprogramm
Funktionsbausteine
Anwenderprogramm
Flash---PROM
Verkehrs-
speicher
Feldbus
Schnitt-
stellen-
umsetzung
Serielle
Schnittstelle
Steckplatz-
kodierung
Prozessor
Universal-
Eingang
*)
S41
E41
Kombi-
Eingang1
*)
Fehlerstrom-
Leistungs-
elektronik
ansteuerung/
Thyristor-
messung
Motorstrom-
messung
Kühlkörper-
temperatur-
messung
RxD++5,8 VGND
Nulldurchgangs-
erfassung
PE
L1
L2
L3
STP2
STP3
STP1
STP0
US1
STP5
STP4
PBB+
PBB---
PBA---
PBA+
GND_RS
T1_OUT
R1_IN
S31
E31
Kombi-
Eingang2
*)
PT100
5V,±7,5V,24V
Netzteil
DPRAM
Prozessor
Prozeßsignale
--- --- --- ---
Wegerfassung
Drehmoment
Sensorik
Motor-
temperatur
TxD---TxD+RxD---
SENSE---SENSE+
M 3∽
BAT---Schnitt-stelle *)
*)Option
854
2
4
8
7612
911
X12
X10
X12
+
0 V
US1
7
8
6
5
4
10
9
13
14
2
1
3
2
1
15
3
X11
16
17
18
19
22
23
20
21
X11
PROPOS
16
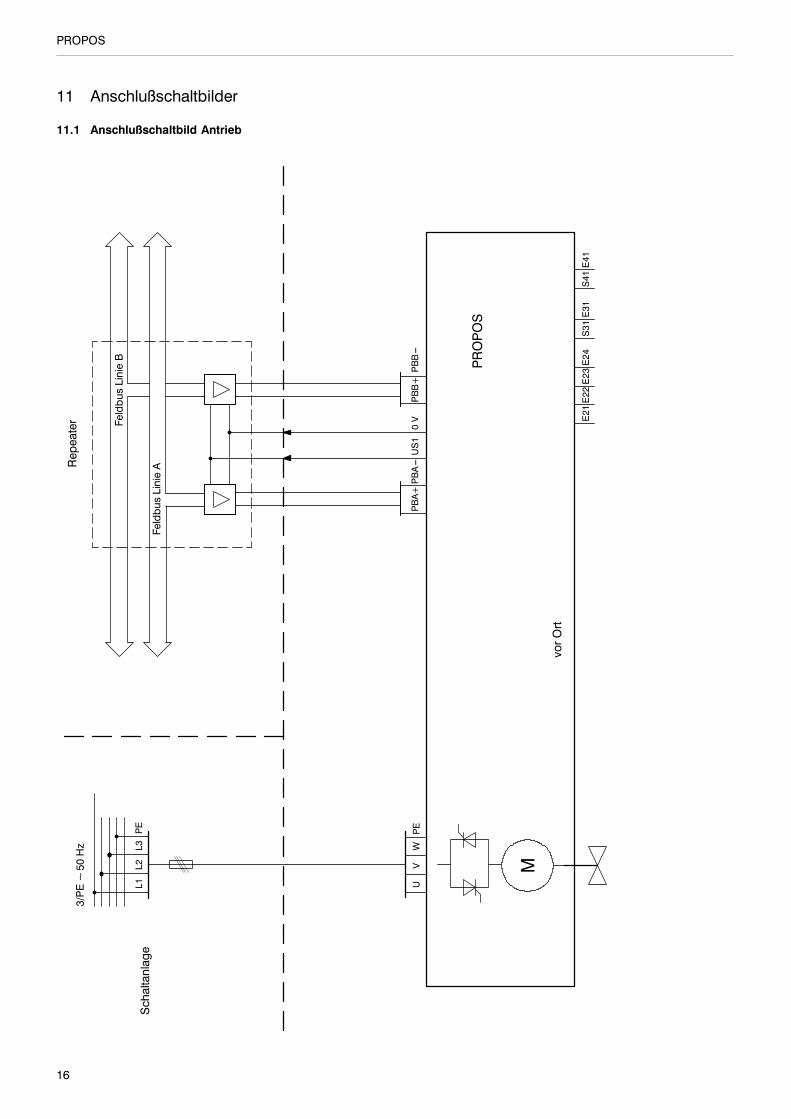
11 Anschlußschaltbilder
11.1 Anschlußschaltbild Antrieb
MvorOrt
PROPOS
L1L2
L3PE
3/PE~50Hz
PBA+PBA---
PBB+PBB---
FeldbusLinieB
FeldbusLinieA
E22
E21
E24
E23
E31
S31
VU
PEW
Repeater
Schaltanlage
US10V
E41
S41
PROPOS
17
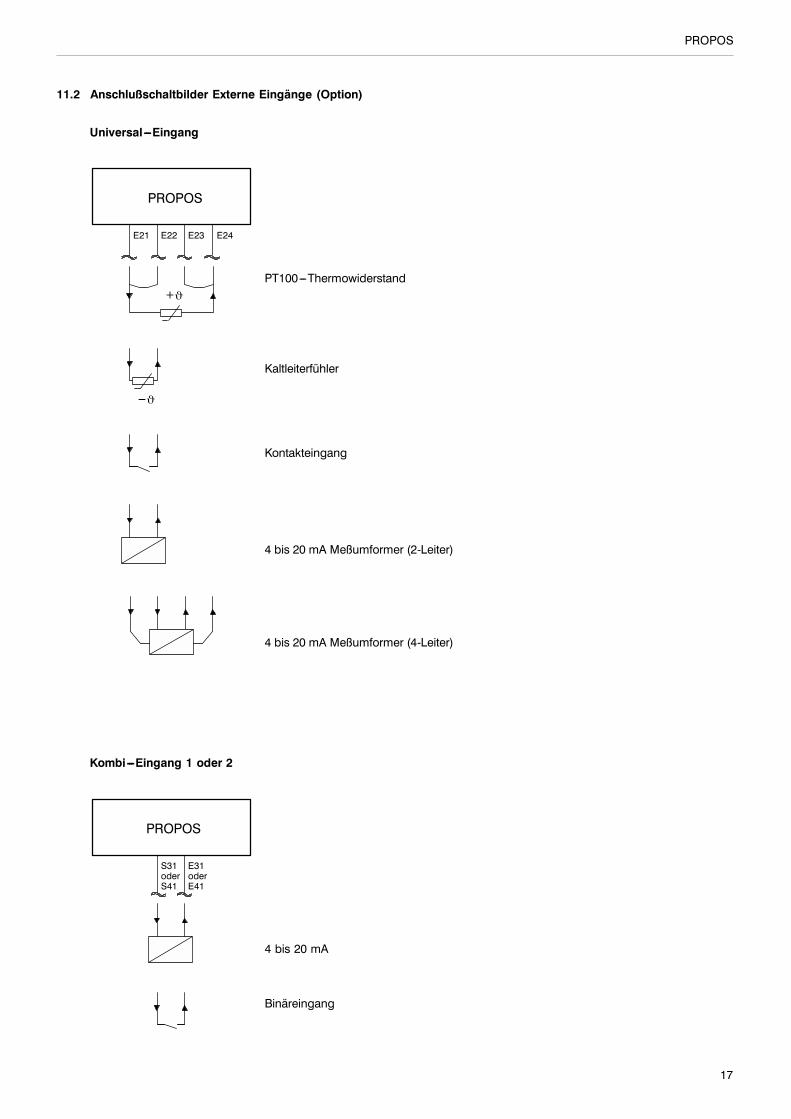
11.2 Anschlußschaltbilder Externe Eingänge (Option)
PROPOS
E22E21 E24E23
Universal---Eingang
+
---
PT100---Thermowiderstand
Kaltleiterfühler
4 bis 20 mA Meßumformer (4-Leiter)
4 bis 20 mA Meßumformer (2-Leiter)
Kontakteingang
PROPOS
S31 E31
Kombi---Eingang 1 oder 2
4 bis 20 mA
Binäreingang
oder oderS41 E41

PROPOS
18
12 Mechanischer Aufbau
Die Modulbauweise des intelligenten Stell- und RegelantriebesPROPOS gestattet mit wenig Grundvarianten die Verwendungals Regelantrieb und als Steuerantrieb.
Durch Kombination der Grundvarianten mit Topfmotor, ersterGetriebestufe, zweiter Getriebestufe und genormter mechani-scher Schnittstelle am Abtrieb wird die anwendungsspezifi-sche Steuer- und Regelantriebs---Variante realisiert.
Die erforderliche Abtriebsdrehzahl wird durch die Wahl derGetriebestufenkombinationen und der Motorpolzahl erreicht.An die mechanische Schnittstelle des Antriebs werden armatu-renspezifische Abtriebsformen nach internationalen Normenmontiert. Damit ist eine einfache Anpassung an alle Arma-turen, sowie eine nachträgliche Umrüstung ohne Eingriffe indas Hauptgetriebe problemlos möglich. Eine Aufteilung desGetriebes in zwei Getriebestufen bringt eine hohe Anfahrdyna-mik. Ausgewählte Materialpaarungen mit schwingungsdämp-fenden Eigenschaften minimieren die Geräuschentwicklung.
Hystereseminimierte Drehmomentabgriffe der Mechanik unddie verschleiß- und spielarme Herausführung des Wegsignalssind technische Merkmale. Robust ausgelegte Drehstrom-Asynchron---Motoren mit hoher Schutzart (IP 67) und Hand-radnotbetätigung ohne Umschaltung sichern dem Betreiberhohe Verfügbarkeit auch im rauhen Betrieb.
Intelligentes Getriebekonzept
Das bewährte DREHMO---Longlife---Getriebekonzept bietet aufder Basis eines Planetengetriebes hohe Zuverlässigkeit. Diefür Steuer- und Regelantriebe ungewöhnlich hohe Langlebig-keit wird durch die solide Gestaltung aller Kraftübertragungs-bauteile erreicht, d. h. durch eine Ausbildung der Verzah-nungskinematik in Richtung geringerer Relativbewegungenunter Last und geringe spezifische Flankenpressung. Weiter-hin minimiert die Lifetime---Schmierung in jeder Einbaulagezuverlässig den Verschleiß.
Das Untersetzungsgetriebe hat die Aufgabe, die Drehzahlender Antriebsmotoren auf die verfügbaren Abtriebsdrehzahlenzu reduzieren. Die Forderungen wie Langlebigkeit, geringesVerdrehflankenspiel, geringe Geräuschentwicklung werdenerfüllt.
Der Antriebsmotor, ausgeführt als Topfmotor in der SchutzartIP 67, ist z. B. bei Regelantrieben so dimensioniert, daß beiden Betriebsarten S4 bzw. S5 mit Einschaltdauern bis zu 35 %und Schalthäufigkeiten bis zu 1200 Schaltungen pro Stundeein ausreichender Abstand zur zulässigen Wicklungstempera-tur für die Wärmeklasse F auch bei maximal zugelassenerUmgebungstemperatur von 60 C eingehalten wird. Die Motor-lager sind gekapselt und lebensdauergeschmiert.
Die erste Getriebestufe ist auf geringe Massenträgheit zurErlangung einer guten Anfahrdynamik und auf Geräusch-dämpfung wegen der hohen Antriebsdrehzahl konstruiert. Dieweitere Reduzierung der Drehzahl erfolgt in einem einstufigenPlanetengetriebe. Der Kraftfluß geht vom Exzenter über dasPlanetenrad, der sich an dem bei Motorbetrieb stillstehendenHohlrad abwälzt, dann über die Kopplungsscheibe zurAbtriebswelle.
Bei Schwenkantrieben für Steuerbetrieb für kleinen Dreh-momentbedarf kommt ein artverwandtes Getriebekonzept inStufenplanetausführung und wesentlich höheren Überset-zungen zum Einsatz.
In dieser Getriebestufe liegen hohe Drehmomente vor. ImHinblick auf hohe Standfestigkeit wird hier eine Spezialver-zahnung mit flächigem Zahnkontakt, hoher Überdeckung undgeringer Gleitgeschwindigkeit eingesetzt. Der Übergang vonden Mitnehmerbolzen auf die Kopplungsscheibe hat konkav---konvexe Berührungsflächen und einen hohen Wälzanteil. Diegesamte Getriebestufe zeichnet sich durch kleine HertzscheFlächenpressungen und geringe Gleitgeschwindigkeit aus. Sieist somit dauerfest gestaltet. Die Selbsthemmung des Gesamt-getriebes wird in dieser Planetenstufe sichergestellt.
Der zweite Freiheitsgrad des Planetengetriebes wird durch dieselbsthemmende Schnecke gefesselt, die einerseits denHandradnotbetrieb darstellt und andererseits als Drehmoment-stütze für das Hohlrad die Sensorik für die Drehmomentmel-dung ansteuert. Die Schnecke ist in vorgespannten Feder-paketen gelagert, so daß alle Drehmomente kleiner dem maxi-mal zulässigen Regelmoment ohne Verschiebebewegung derSchnecke gemessen werden. Außerdem wird die Meßhyste-rese im Gegensatz zu den am Markt befindlichen Verschiebe-schnecken---Antrieben, bei denen der Leistungsfluß über dieMeßschnecke läuft, dadurch minimiert, daß bei diesem Getrie-bekonzept keine Reibkräfte infolge von Drehmomentumfangs-kräften überwunden werden müssen.
Der gesamte Getrieberaum ist mit einer Lifetime---Ölfüllungversehen. Der Wärmehaushalt ist so bemessen, daß es selbstbei der oben angeführten Betriebsart zu keiner vorzeitigenthermischen Schädigung der Dichtelemente und der Ölfüllungkommen kann.
PROPOS
19
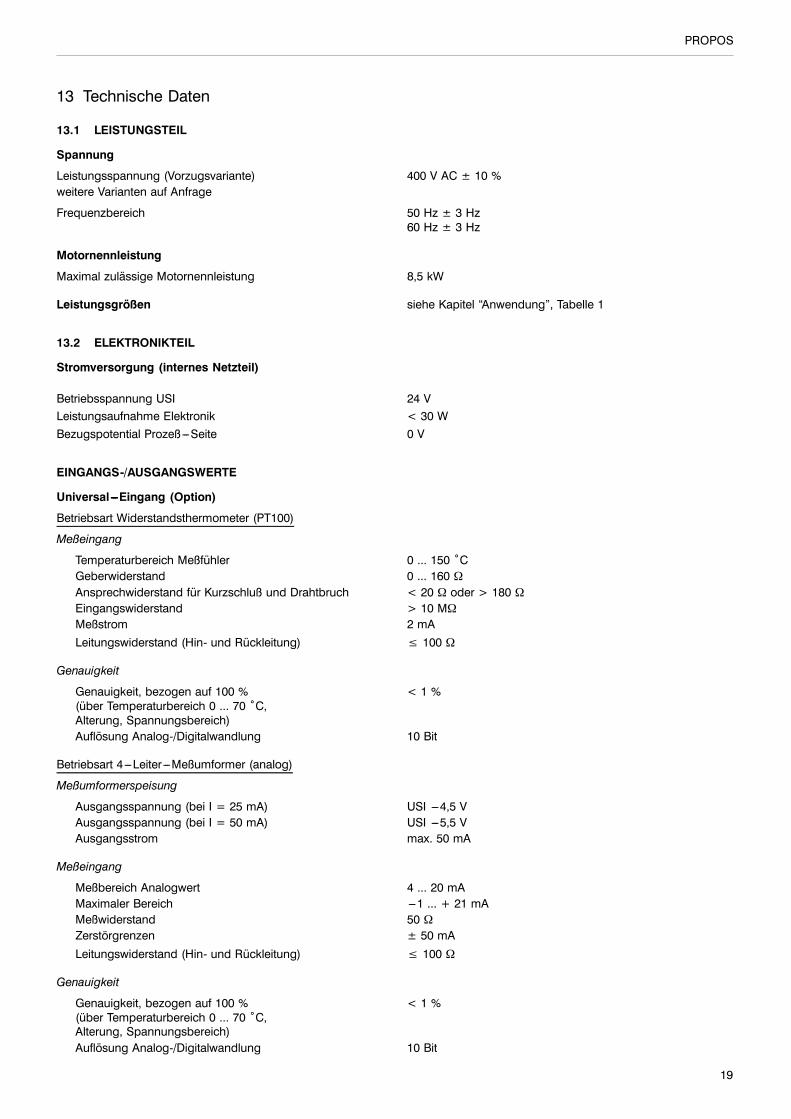
13 Technische Daten
13.1 LEISTUNGSTEIL
Spannung
Leistungsspannung (Vorzugsvariante) 400 V AC ± 10 %weitere Varianten auf Anfrage
Frequenzbereich 50 Hz ± 3 Hz60 Hz ± 3 Hz
Motornennleistung
Maximal zulässige Motornennleistung 8,5 kW
Leistungsgrößen siehe Kapitel “Anwendung”, Tabelle 1
13.2 ELEKTRONIKTEIL
Stromversorgung (internes Netzteil)
Betriebsspannung USI 24 VLeistungsaufnahme Elektronik < 30 WBezugspotential Prozeß---Seite 0 V
EINGANGS-/AUSGANGSWERTE
Universal---Eingang (Option)
Betriebsart Widerstandsthermometer (PT100)
Meßeingang
Temperaturbereich Meßfühler 0 ... 150 ˚CGeberwiderstand 0 ... 160 ΩAnsprechwiderstand für Kurzschluß und Drahtbruch < 20 Ω oder > 180 ΩEingangswiderstand > 10 MΩMeßstrom 2 mALeitungswiderstand (Hin- und Rückleitung) ≤ 100 Ω
Genauigkeit
Genauigkeit, bezogen auf 100 % < 1 %(über Temperaturbereich 0 ... 70 ˚C,Alterung, Spannungsbereich)Auflösung Analog-/Digitalwandlung 10 Bit
Betriebsart 4---Leiter---Meßumformer (analog)
Meßumformerspeisung
Ausgangsspannung (bei I = 25 mA) USI ---4,5 VAusgangsspannung (bei I = 50 mA) USI ---5,5 VAusgangsstrom max. 50 mA
Meßeingang
Meßbereich Analogwert 4 ... 20 mAMaximaler Bereich ---1 ... + 21 mAMeßwiderstand 50 ΩZerstörgrenzen ± 50 mALeitungswiderstand (Hin- und Rückleitung) ≤ 100 Ω
Genauigkeit
Genauigkeit, bezogen auf 100 % < 1 %(über Temperaturbereich 0 ... 70 ˚C,Alterung, Spannungsbereich)Auflösung Analog-/Digitalwandlung 10 Bit

PROPOS
20
Betriebsart 2---Leiter---Meßumformer (analog)
Meßumformerspeisung
Ausgangsspannung (bei I = 25 mA) USI ---4,5 VAusgangsspannung (bei I = 50 mA) USI ---5,5 VAusgangsstrom max. 50 mA
Meßeingang
Meßbereich Analogwert 4 ... 20 mAMaximaler Bereich ---1 ... + 21 mAMeßwiderstand 50 ΩZerstörgrenzen ± 50 mALeitungswiderstand (Hin- und Rückleitung) ≤ 100 Ω
Genauigkeit
Genauigkeit, bezogen auf 100 % < 1 %(über Temperaturbereich 0 ... 70 ˚C,Alterung, Spannungsbereich)Auflösung Analog-/Digitalwandlung 10 Bit
Betriebsart Kaltleiter (Thermistor)nach DIN 44080 bzw. IEC 34---11---2
Schaltschwelle 680 ± 30 ΩMeßstrom 2 mA
Betriebsart Binäreingabe (Kontakt)
Kontaktspeisung
Ausgangsspannung (bei I = 25 mA) USI ---4,5 VAusgangsspannung (bei I = 50 mA) USI ---5,5 VAusgangsstrom max. 50 mA
Meßeingang
Signalpegel, 0---Signal 0 ... 3 V1---Signal 15 ... 30 V
Eingangswiderstand bei 0---Signal 15 kΩ, + 13 %, ---10 %bei 1---Signal 5 ... 15 kΩ
Zerstörgrenze > 65 VLeitungswiderstand (Hin- und Rückleitung) ≤ 100 Ω
PROPOS
21
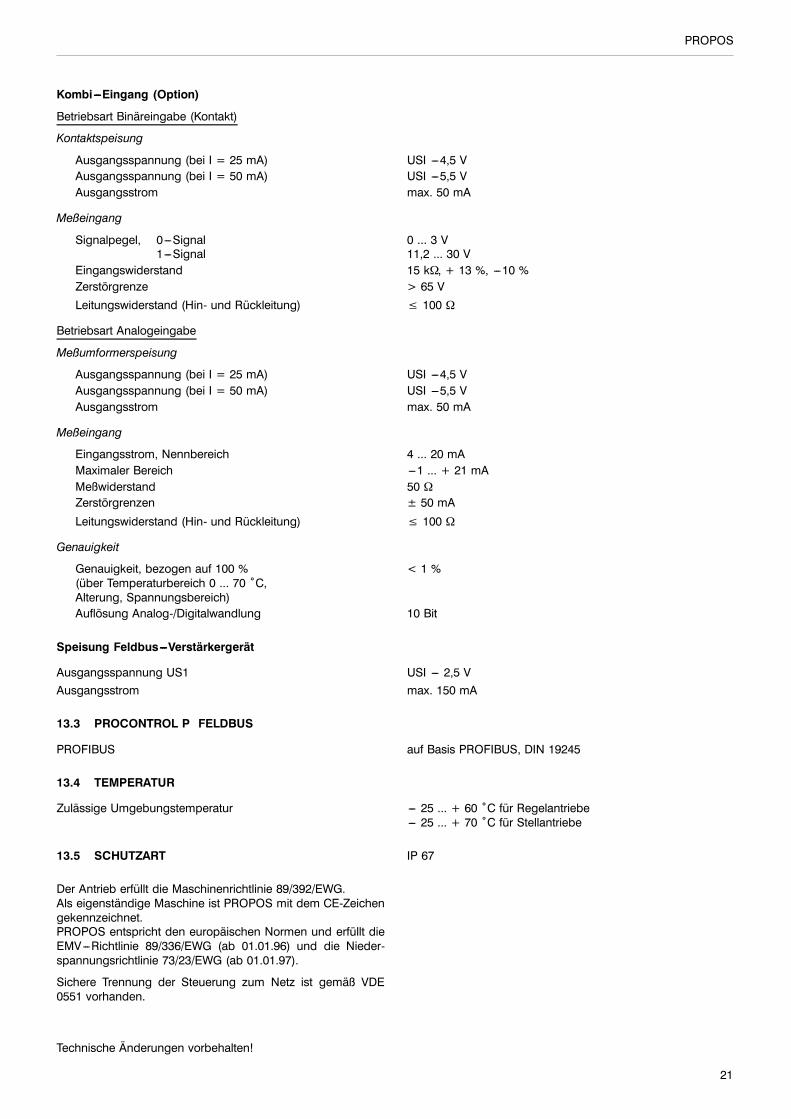
Kombi---Eingang (Option)
Betriebsart Binäreingabe (Kontakt)
Kontaktspeisung
Ausgangsspannung (bei I = 25 mA) USI ---4,5 VAusgangsspannung (bei I = 50 mA) USI ---5,5 VAusgangsstrom max. 50 mA
Meßeingang
Signalpegel, 0---Signal 0 ... 3 V1---Signal 11,2 ... 30 V
Eingangswiderstand 15 kΩ, + 13 %, ---10 %Zerstörgrenze > 65 VLeitungswiderstand (Hin- und Rückleitung) ≤ 100 Ω
Betriebsart Analogeingabe
Meßumformerspeisung
Ausgangsspannung (bei I = 25 mA) USI ---4,5 VAusgangsspannung (bei I = 50 mA) USI ---5,5 VAusgangsstrom max. 50 mA
Meßeingang
Eingangsstrom, Nennbereich 4 ... 20 mAMaximaler Bereich ---1 ... + 21 mAMeßwiderstand 50 ΩZerstörgrenzen ± 50 mA
Leitungswiderstand (Hin- und Rückleitung) ≤ 100 Ω
Genauigkeit
Genauigkeit, bezogen auf 100 % < 1 %(über Temperaturbereich 0 ... 70 ˚C,Alterung, Spannungsbereich)Auflösung Analog-/Digitalwandlung 10 Bit
Speisung Feldbus---Verstärkergerät
Ausgangsspannung US1 USI --- 2,5 VAusgangsstrom max. 150 mA
13.3 PROCONTROL P FELDBUS
PROFIBUS auf Basis PROFIBUS, DIN 19245
13.4 TEMPERATUR
Zulässige Umgebungstemperatur --- 25 ... + 60 ˚C für Regelantriebe--- 25 ... + 70 ˚C für Stellantriebe
13.5 SCHUTZART IP 67
Der Antrieb erfüllt die Maschinenrichtlinie 89/392/EWG.Als eigenständige Maschine ist PROPOS mit dem CE-Zeichengekennzeichnet.PROPOS entspricht den europäischen Normen und erfüllt dieEMV---Richtlinie 89/336/EWG (ab 01.01.96) und die Nieder-spannungsrichtlinie 73/23/EWG (ab 01.01.97).
Sichere Trennung der Steuerung zum Netz ist gemäß VDE0551 vorhanden.
Technische Änderungen vorbehalten!

PROPOS
22
ABB Utility Automation GmbH
Postfach 100351, D---68128 MannheimTelefon (0621) 381 3288, Telefax (0621) 381 3719Telex 462 411 107 ab d
Printed in Germany (DEUTA/FD22 1099)







