

First-MOVE Datenblatt
First-MOVE Datenblatt
Revision 1.2 (14.11.2013)
Vorbereitet von:
Dipl.-Ing. Claas Olthoff
First-MOVE Datenblatt
Inhaltsverzeichnis
1 Einleitung ..................................................................................................................... 1
2 Mechanische Eigenschaften ....................................................................................... 2
3 Elektrische Eigenschaften .......................................................................................... 4
4 Kommunikationssystem.............................................................................................. 6
5 On-Board Rechner ...................................................................................................... 9
6 Sicherheitsmechanismen ...........................................................................................10
7 Nutzlast .......................................................................................................................12
8 Lageregelung ..............................................................................................................16
9 Missionsziele ..............................................................................................................17
10 Projektziele .................................................................................................................20
First-MOVE Datenblatt
1
1 Einleitung
First-MOVE ist ein Kleinsatellitenprojekt am Lehrstuhl für Raumfahrttechnik (LRT) der
Technischen Universität München (TUM) mit dem Hauptziel der praktischen Ausbildung von
Studenten. Dieses Ziel wird durch eine Einbindung der Studenten in allen Phasen des
Projekts, zum Teil auch unter Eigenverantwortlichkeit, erreicht. Ein Mitarbeiter des Lehrstuhls
hat die Position des technischen und programmatischen Projektleiters inne.
Das Projekt wurde 2006 auf Initiative von Studenten des LRT ins Leben gerufen und wird seit
2008 vom Deutschen Zentrum für Luft- und Raumfahrt gefördert. Der Start von First-MOVE
soll am 21. November 2013 um 8:10:11 Uhr MEZ mit einer russischen Dnepr Rakete vom
Startplatz Yasny aus erfolgen.
Dieses Dokument soll eine Übersicht über die technischen Eigenschaften und Fähigkeiten
von First-MOVE geben und die Missionsziele erläutern.
Abbildung 1: Missionsabzeichen von First-MOVE
First-MOVE Datenblatt
2
2 Mechanische Eigenschaften
First-MOVE wurde nach dem CubeSat Standard (Stand: 2008) gebaut und ist ein sogenannter
1 Unit (1U) CubeSat. Dies begrenzt die Masse des Satelliten auf 1 kg und die Dimensionen (in
der Startkonfiguartion) auf 10 x 10 x 10 cm. Im Detail sind diese Werte leicht anders (siehe
Tabelle unten). Für nähere Informationen sei der aktuelle CubeSat Standard als Referenz
genannt (http://www.cubesat.org).
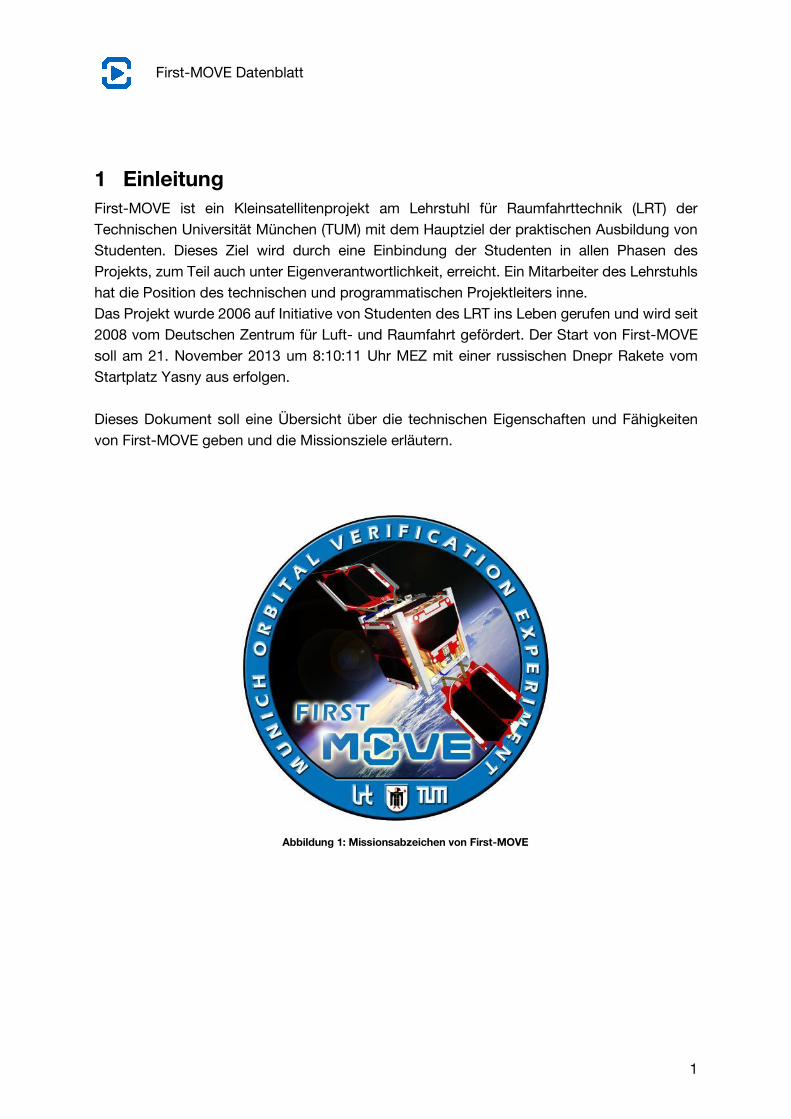
Die folgenden Bilder zeigen die Dimensionen von First-MOVE. Im vollständig integrierten
Zustand hat der Satellit eine Masse von 912 g, erfüllt also auch die Massenvorgabe des
CubeSat Standards.
Masse: 912 g
Höhe 113,5 mm
Breite 100 mm
Länge 100 mm
Spannweite 378 mm
Abbildung 2: First-MOVE mit ausgeklappten Solarzellen
First-MOVE Datenblatt
3
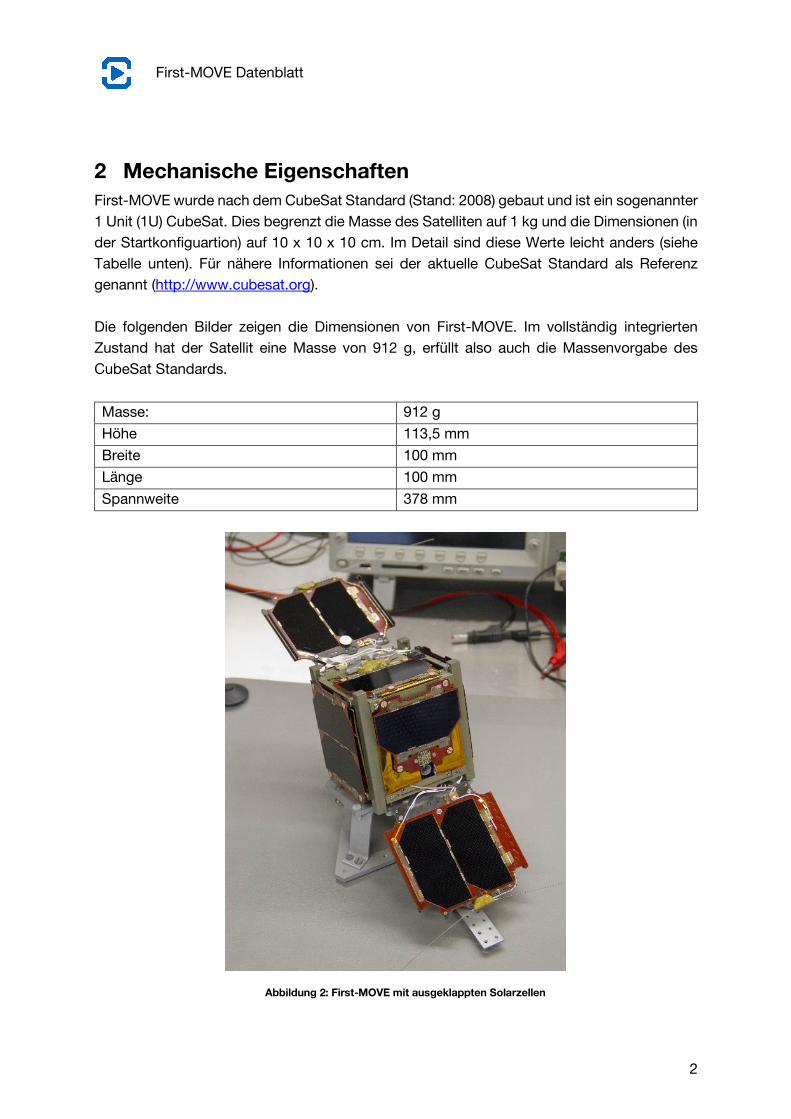
Abbildung 3: First-MOVE in der Startkonfiguration mit eingeklappten Solarzellen
First-MOVE Datenblatt
4
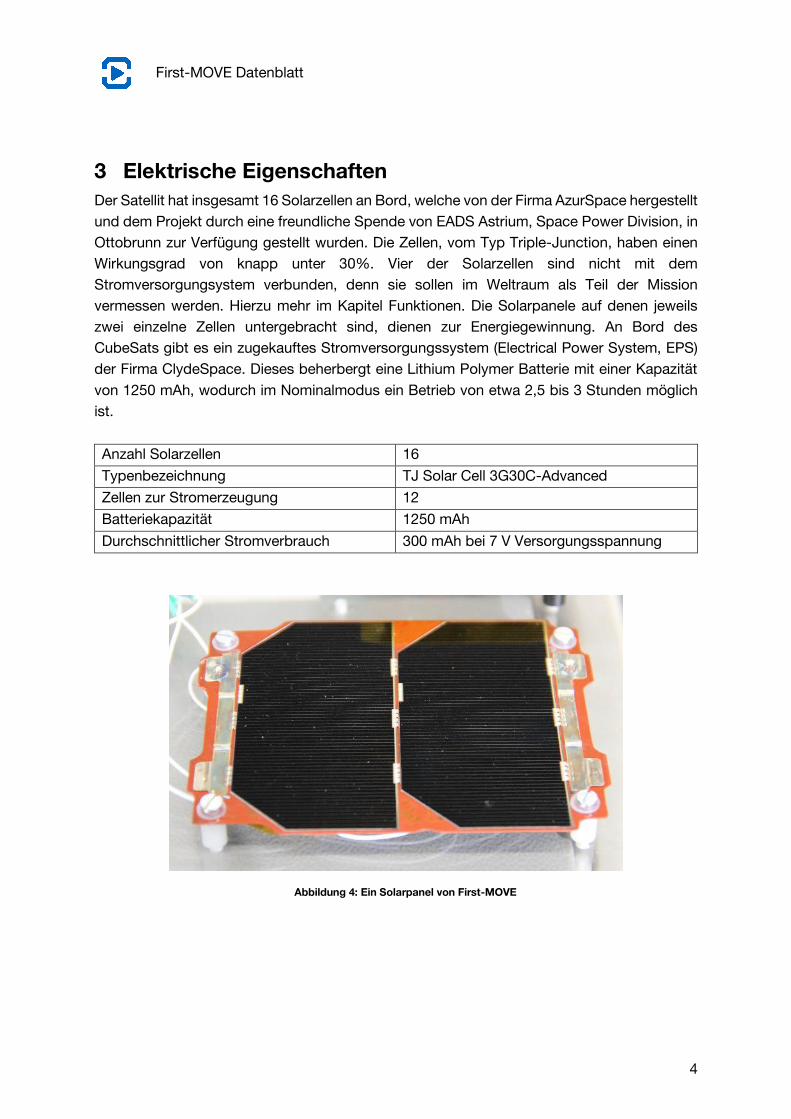
3 Elektrische Eigenschaften
Der Satellit hat insgesamt 16 Solarzellen an Bord, welche von der Firma AzurSpace hergestellt
und dem Projekt durch eine freundliche Spende von EADS Astrium, Space Power Division, in
Ottobrunn zur Verfügung gestellt wurden. Die Zellen, vom Typ Triple-Junction, haben einen
Wirkungsgrad von knapp unter 30%. Vier der Solarzellen sind nicht mit dem
Stromversorgungsystem verbunden, denn sie sollen im Weltraum als Teil der Mission
vermessen werden. Hierzu mehr im Kapitel Funktionen. Die Solarpanele auf denen jeweils
zwei einzelne Zellen untergebracht sind, dienen zur Energiegewinnung. An Bord des
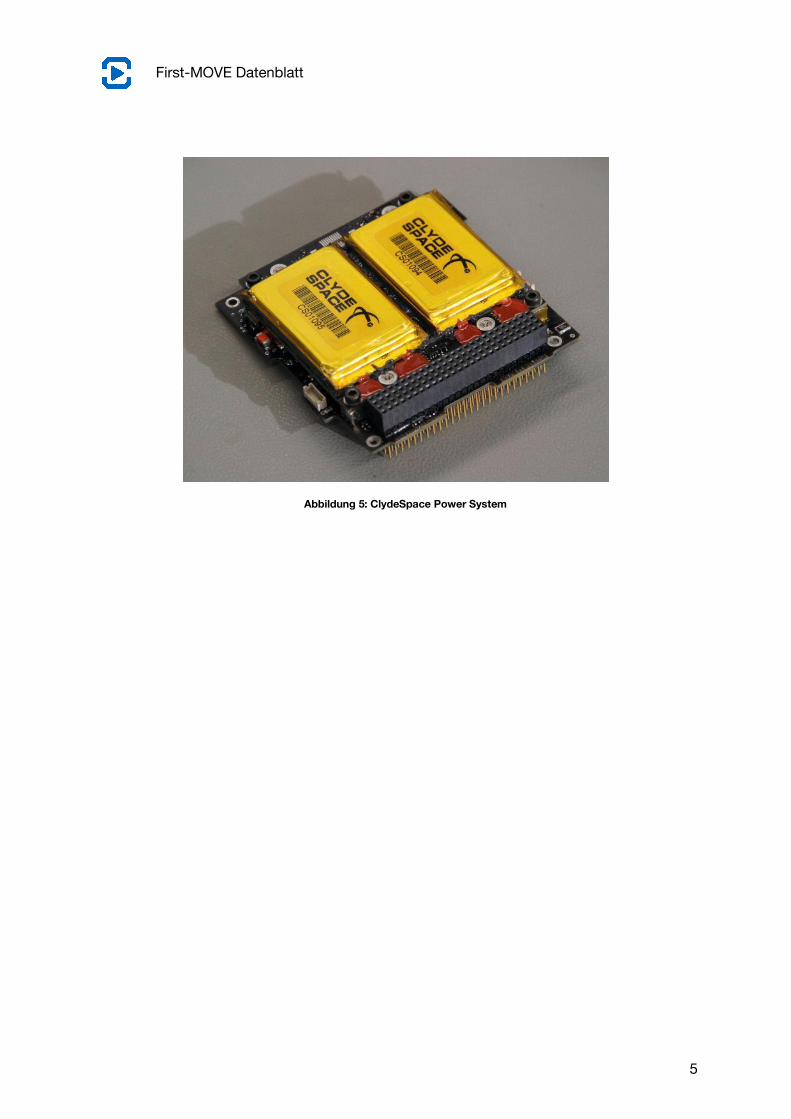
CubeSats gibt es ein zugekauftes Stromversorgungssystem (Electrical Power System, EPS)
der Firma ClydeSpace. Dieses beherbergt eine Lithium Polymer Batterie mit einer Kapazität
von 1250 mAh, wodurch im Nominalmodus ein Betrieb von etwa 2,5 bis 3 Stunden möglich
ist.
Anzahl Solarzellen 16
Typenbezeichnung TJ Solar Cell 3G30C-Advanced
Zellen zur Stromerzeugung 12
Batteriekapazität 1250 mAh
Durchschnittlicher Stromverbrauch 300 mAh bei 7 V Versorgungsspannung
Abbildung 4: Ein Solarpanel von First-MOVE
First-MOVE Datenblatt
5
Abbildung 5: ClydeSpace Power System
First-MOVE Datenblatt
6
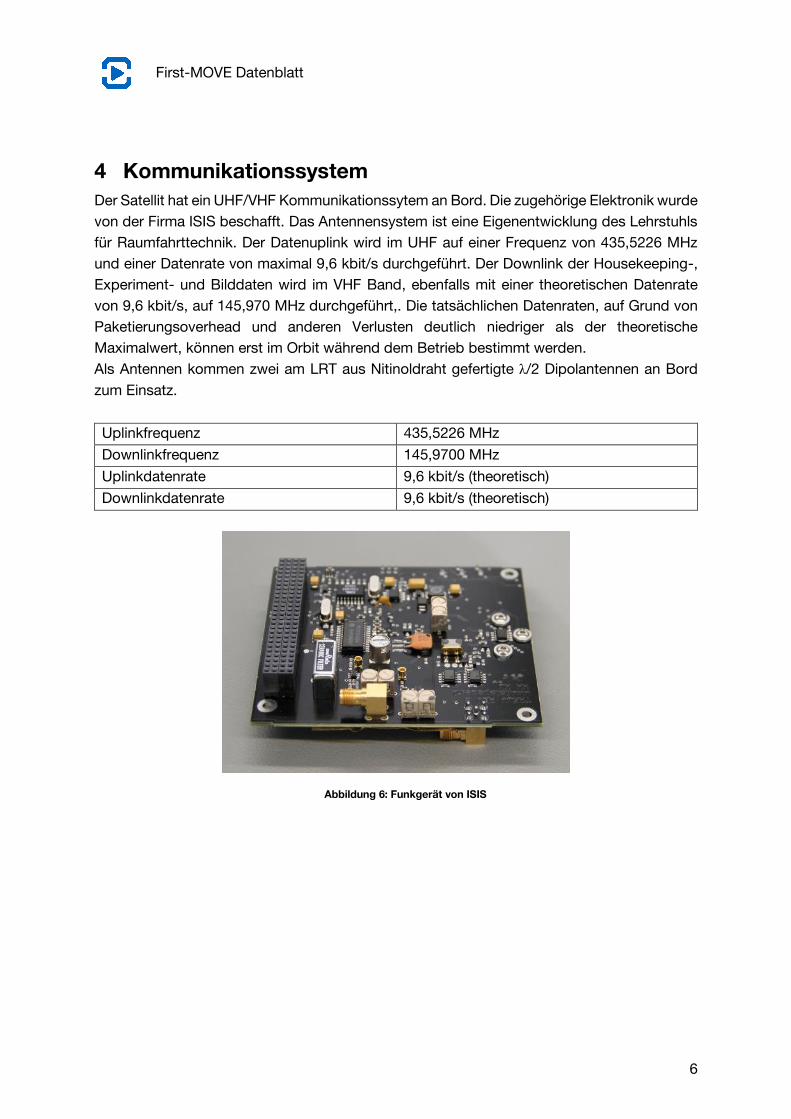
4 Kommunikationssystem
Der Satellit hat ein UHF/VHF Kommunikationssytem an Bord. Die zugehörige Elektronik wurde
von der Firma ISIS beschafft. Das Antennensystem ist eine Eigenentwicklung des Lehrstuhls
für Raumfahrttechnik. Der Datenuplink wird im UHF auf einer Frequenz von 435,5226 MHz
und einer Datenrate von maximal 9,6 kbit/s durchgeführt. Der Downlink der Housekeeping-,
Experiment- und Bilddaten wird im VHF Band, ebenfalls mit einer theoretischen Datenrate
von 9,6 kbit/s, auf 145,970 MHz durchgeführt,. Die tatsächlichen Datenraten, auf Grund von
Paketierungsoverhead und anderen Verlusten deutlich niedriger als der theoretische
Maximalwert, können erst im Orbit während dem Betrieb bestimmt werden.
Als Antennen kommen zwei am LRT aus Nitinoldraht gefertigte λ/2 Dipolantennen an Bord
zum Einsatz.
Uplinkfrequenz 435,5226 MHz
Downlinkfrequenz 145,9700 MHz
Uplinkdatenrate 9,6 kbit/s (theoretisch)
Downlinkdatenrate 9,6 kbit/s (theoretisch)
Abbildung 6: Funkgerät von ISIS
First-MOVE Datenblatt
7
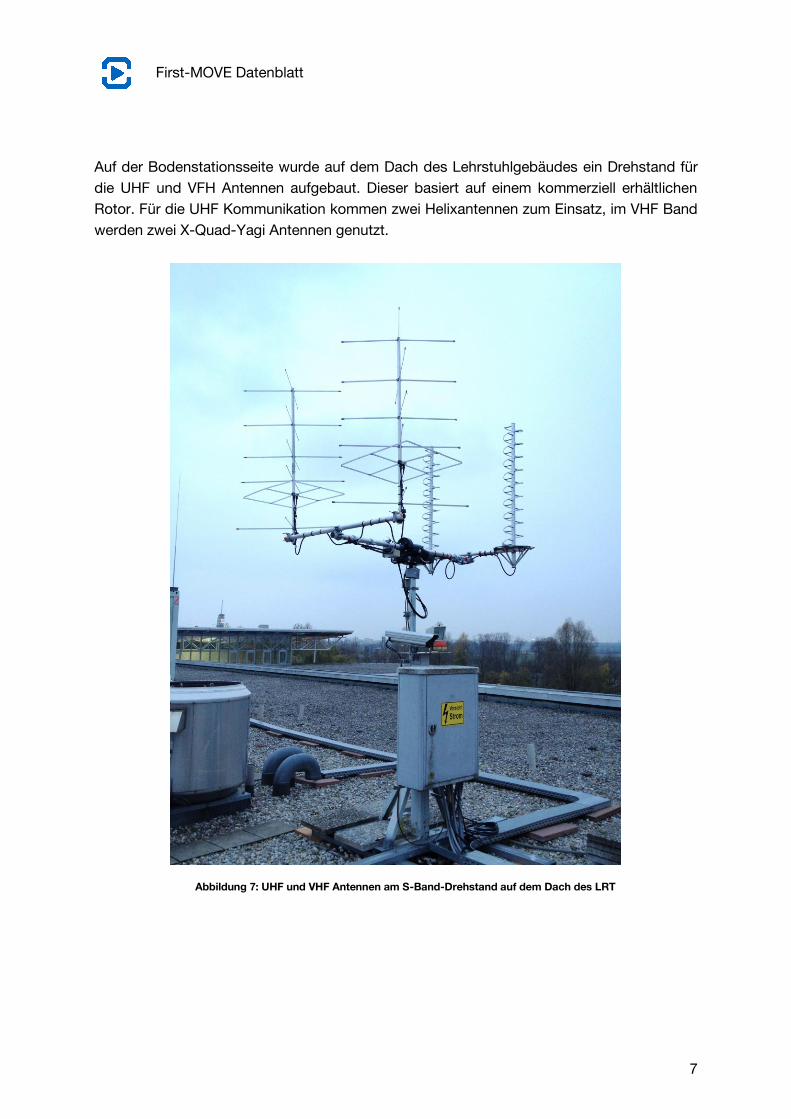
Auf der Bodenstationsseite wurde auf dem Dach des Lehrstuhlgebäudes ein Drehstand für
die UHF und VFH Antennen aufgebaut. Dieser basiert auf einem kommerziell erhältlichen
Rotor. Für die UHF Kommunikation kommen zwei Helixantennen zum Einsatz, im VHF Band
werden zwei X-Quad-Yagi Antennen genutzt.
Abbildung 7: UHF und VHF Antennen am S-Band-Drehstand auf dem Dach des LRT

First-MOVE Datenblatt
8
Abbildung 8: Missionskontrollraum
Am Lehrstuhl gibt es ebenfalls einen kleinen Missionskontrollraum von dem aus die Antennen
auf dem Dach angesteuert werden und die Kommunikation mit dem Satelliten im Orbit
durchgeführt wird.
First-MOVE Datenblatt
9
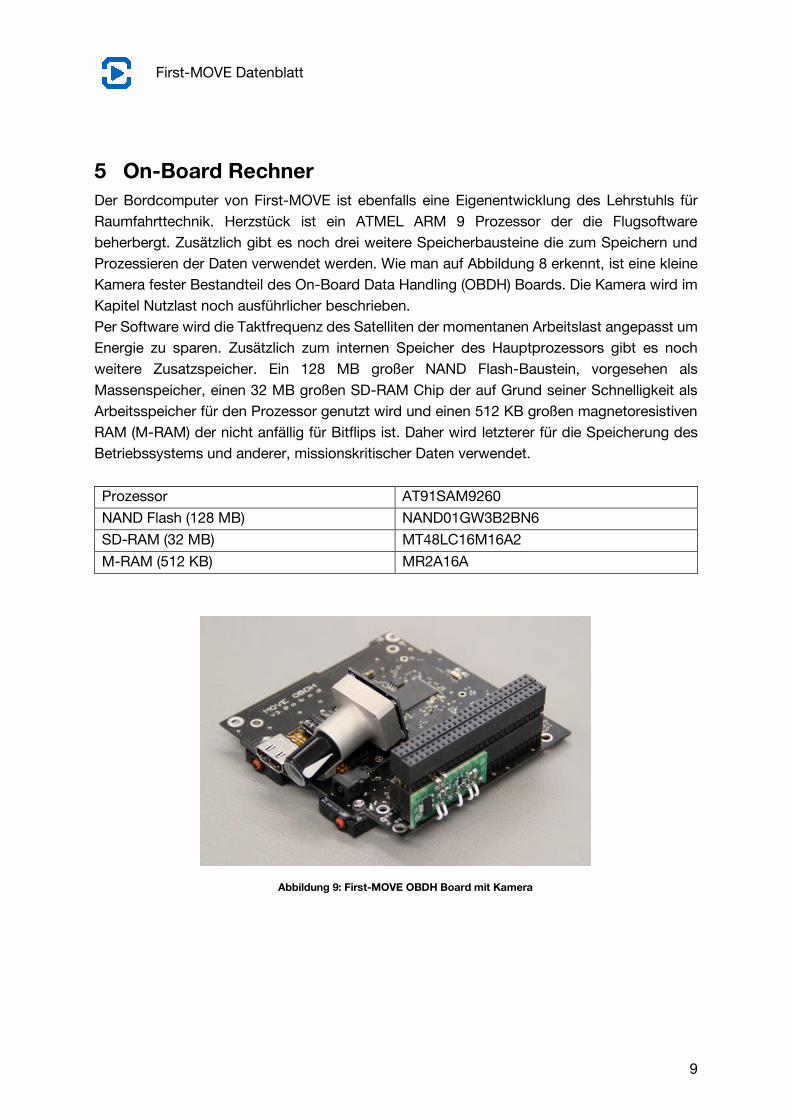
5 On-Board Rechner
Der Bordcomputer von First-MOVE ist ebenfalls eine Eigenentwicklung des Lehrstuhls für
Raumfahrttechnik. Herzstück ist ein ATMEL ARM 9 Prozessor der die Flugsoftware
beherbergt. Zusätzlich gibt es noch drei weitere Speicherbausteine die zum Speichern und
Prozessieren der Daten verwendet werden. Wie man auf Abbildung 8 erkennt, ist eine kleine
Kamera fester Bestandteil des On-Board Data Handling (OBDH) Boards. Die Kamera wird im
Kapitel Nutzlast noch ausführlicher beschrieben.
Per Software wird die Taktfrequenz des Satelliten der momentanen Arbeitslast angepasst um
Energie zu sparen. Zusätzlich zum internen Speicher des Hauptprozessors gibt es noch
weitere Zusatzspeicher. Ein 128 MB großer NAND Flash-Baustein, vorgesehen als
Massenspeicher, einen 32 MB großen SD-RAM Chip der auf Grund seiner Schnelligkeit als
Arbeitsspeicher für den Prozessor genutzt wird und einen 512 KB großen magnetoresistiven
RAM (M-RAM) der nicht anfällig für Bitflips ist. Daher wird letzterer für die Speicherung des
Betriebssystems und anderer, missionskritischer Daten verwendet.
Prozessor AT91SAM9260
NAND Flash (128 MB) NAND01GW3B2BN6
SD-RAM (32 MB) MT48LC16M16A2
M-RAM (512 KB) MR2A16A
Abbildung 9: First-MOVE OBDH Board mit Kamera
First-MOVE Datenblatt
10
6 Sicherheitsmechanismen
Die Umgebungsbedingungen im Weltraum und die Komplexität eines Satellitensystems
erfordern ein hohes Maß an Verlässlichkeit des Satellitenbusses. Um diese Verlässlichkeit
sicherzustellen gibt es einige Sicherheitsmechanismen an Bord von First-MOVE. Diese sind
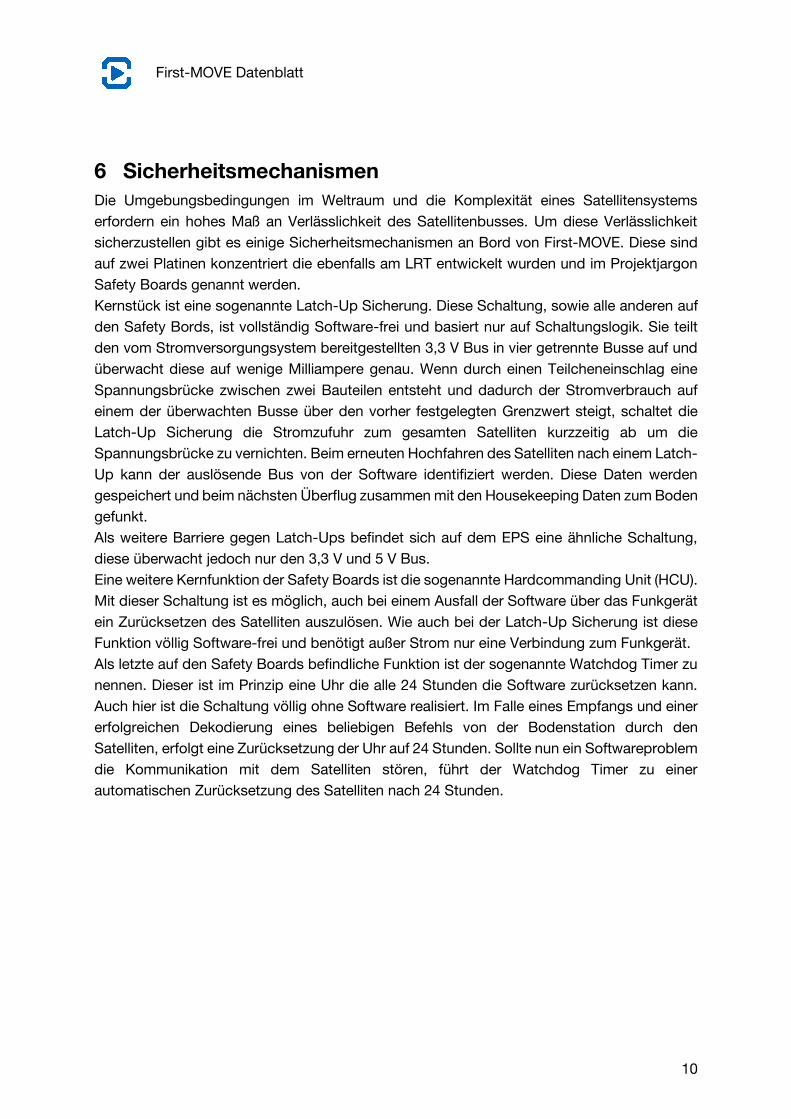
auf zwei Platinen konzentriert die ebenfalls am LRT entwickelt wurden und im Projektjargon
Safety Boards genannt werden.
Kernstück ist eine sogenannte Latch-Up Sicherung. Diese Schaltung, sowie alle anderen auf
den Safety Bords, ist vollständig Software-frei und basiert nur auf Schaltungslogik. Sie teilt
den vom Stromversorgungsystem bereitgestellten 3,3 V Bus in vier getrennte Busse auf und
überwacht diese auf wenige Milliampere genau. Wenn durch einen Teilcheneinschlag eine
Spannungsbrücke zwischen zwei Bauteilen entsteht und dadurch der Stromverbrauch auf
einem der überwachten Busse über den vorher festgelegten Grenzwert steigt, schaltet die
Latch-Up Sicherung die Stromzufuhr zum gesamten Satelliten kurzzeitig ab um die
Spannungsbrücke zu vernichten. Beim erneuten Hochfahren des Satelliten nach einem Latch-
Up kann der auslösende Bus von der Software identifiziert werden. Diese Daten werden
gespeichert und beim nächsten Überflug zusammen mit den Housekeeping Daten zum Boden
gefunkt.
Als weitere Barriere gegen Latch-Ups befindet sich auf dem EPS eine ähnliche Schaltung,
diese überwacht jedoch nur den 3,3 V und 5 V Bus.
Eine weitere Kernfunktion der Safety Boards ist die sogenannte Hardcommanding Unit (HCU).
Mit dieser Schaltung ist es möglich, auch bei einem Ausfall der Software über das Funkgerät
ein Zurücksetzen des Satelliten auszulösen. Wie auch bei der Latch-Up Sicherung ist diese
Funktion völlig Software-frei und benötigt außer Strom nur eine Verbindung zum Funkgerät.
Als letzte auf den Safety Boards befindliche Funktion ist der sogenannte Watchdog Timer zu
nennen. Dieser ist im Prinzip eine Uhr die alle 24 Stunden die Software zurücksetzen kann.
Auch hier ist die Schaltung völlig ohne Software realisiert. Im Falle eines Empfangs und einer
erfolgreichen Dekodierung eines beliebigen Befehls von der Bodenstation durch den
Satelliten, erfolgt eine Zurücksetzung der Uhr auf 24 Stunden. Sollte nun ein Softwareproblem
die Kommunikation mit dem Satelliten stören, führt der Watchdog Timer zu einer
automatischen Zurücksetzung des Satelliten nach 24 Stunden.
First-MOVE Datenblatt
11
Abbildung 10: First-MOVE Safety Boards
First-MOVE Datenblatt
12
7 Nutzlast
7.1 Solarzellen
Direkt nach Projektbeginn wurde damit begonnen eine passende Nutzlast für First-MOVE zu
finden. Die zu diesem Zeitpunkt (2006/2007) noch relativ neuentwickelten Triple-Junction-
Solarzellen wurden seitens der Space Power Division von EADS Astrium zum Zweck einer
Vermessung der Zellen im Weltraum als Spende zur Verfügung gestellt. So wurde der Satellit
um dieses Experiment herum aufgebaut. Um die Solarzellen auf der Außenseite des Satelliten
unterbringen zu können ohne dabei die Fläche der Zellen zur Stromerzeugung zu verringern,
wurden ausklappbare Solarpanele und ein passender Ausklappmechanismus entwickelt.
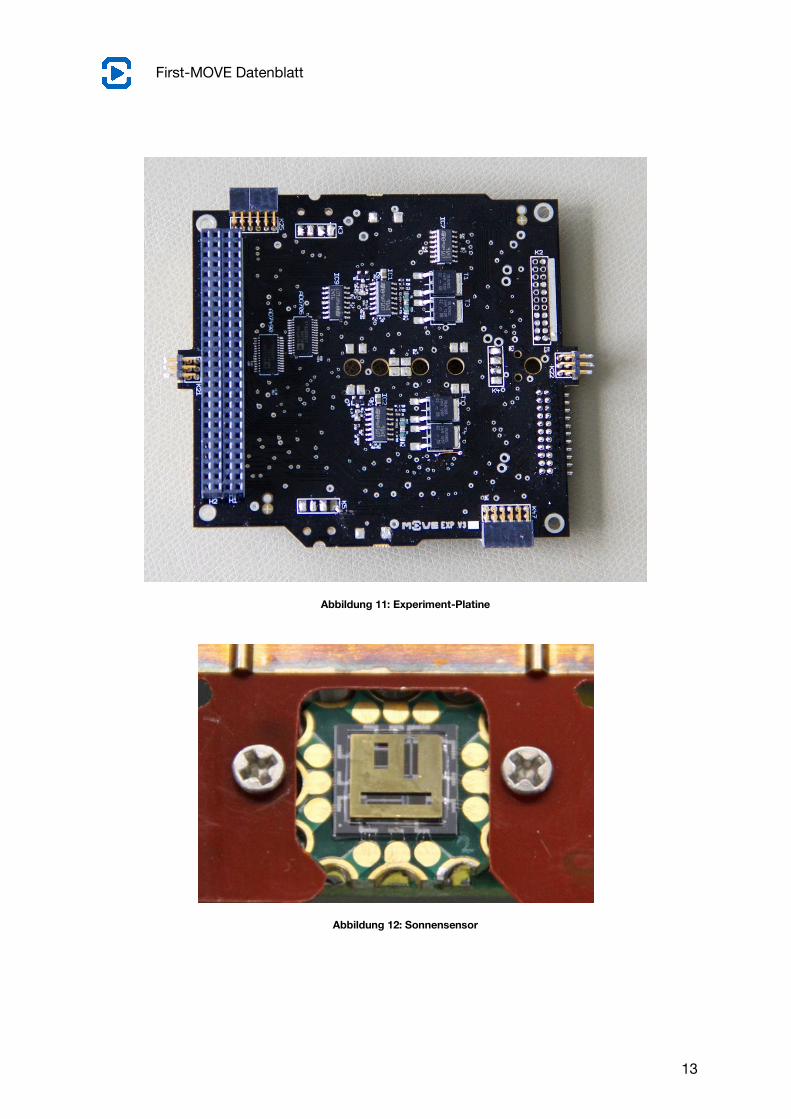
Um Solarzellen zu charakterisieren misst man die Stärke des Zellenstroms in Abhängigkeit
von der angelegten Lastspannung. Dazu wird auf einer speziellen Platine die Lastspannung
der Zellen von 0 bis 3,3 V variiert. Da die Zellen eine Leerlaufspannung von etwa 2,6 V haben,
ist sichergestellt, dass der gesamte Betriebsbereich durchfahren wird. Bei diesen Messungen
ist es natürlich zwingend notwendig die Lichtverhältnisse an der Zelle zu kennen. Auf der Erde
lassen sich diese durch einen entsprechenden Messaufbau festlegen, im Weltraum auf einem
taumelnden Satelliten sind die Lichtverhältnisse unbekannt und ändern sich mit der Zeit relativ
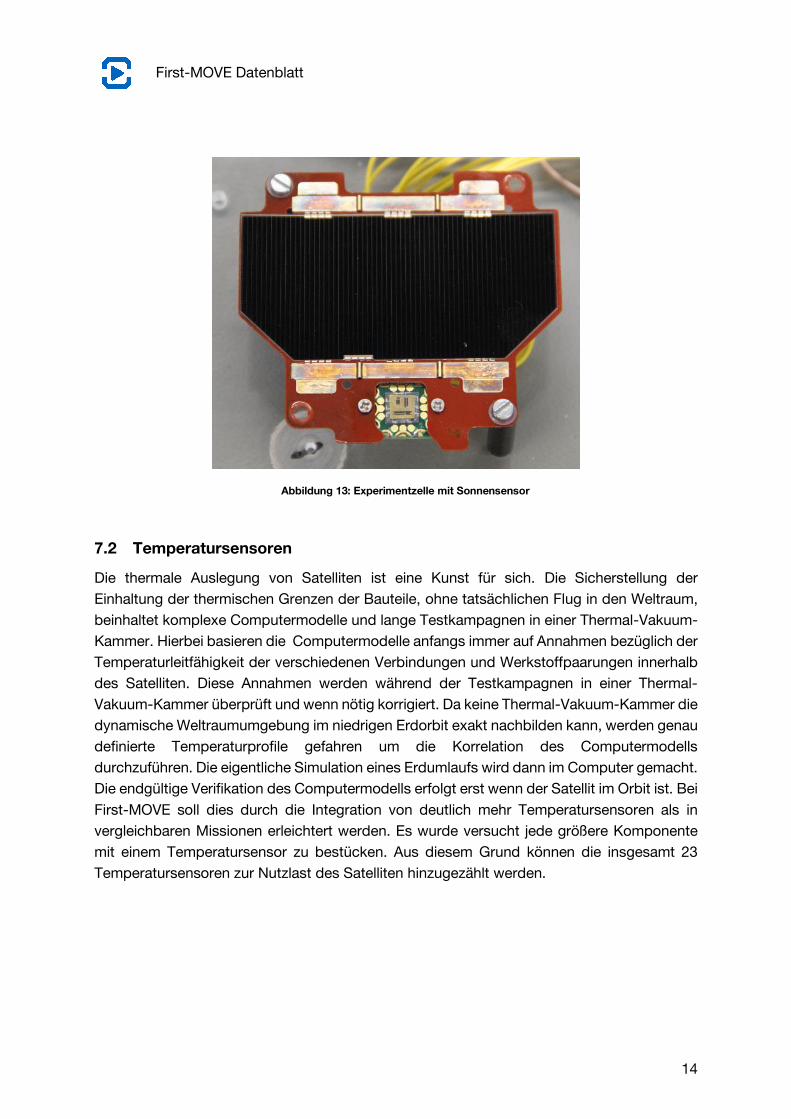
schnell. Daher wurden auf die Seiten des Satelliten auf denen die zu vermessenden Zellen
angebracht sind Sonnensensoren installiert. Diese liefern parallel zur Vermessung der
Solarzellen selbst Daten über den Einfallswinkel der Sonnenstrahlen auf die Solarzelle und
deren Intensität. Mit den gewonnenen Daten kann dann das Verhalten der Solarzellen im
Weltraum charakterisiert werden, insbesondere mit Hinblick auf Veränderungen über die
gesamte Missionsdauer.
First-MOVE Datenblatt
13
Abbildung 11: Experiment-Platine
Abbildung 12: Sonnensensor
First-MOVE Datenblatt
14
Abbildung 13: Experimentzelle mit Sonnensensor
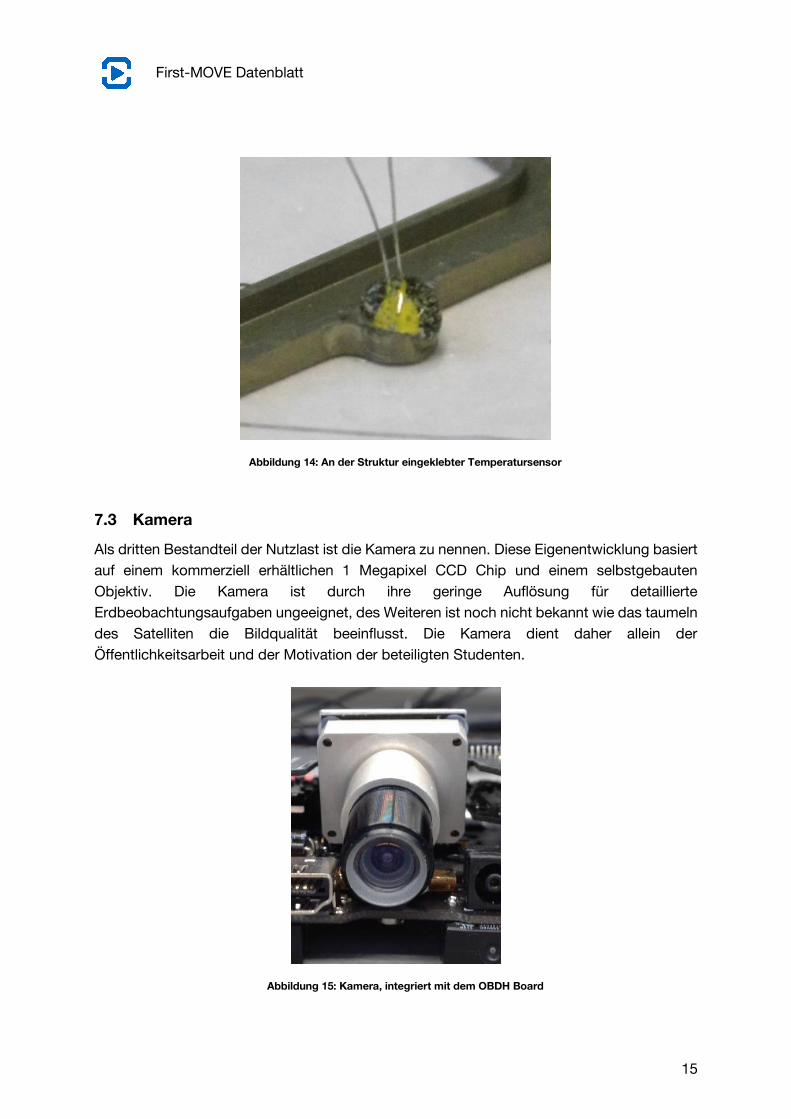
7.2 Temperatursensoren
Die thermale Auslegung von Satelliten ist eine Kunst für sich. Die Sicherstellung der
Einhaltung der thermischen Grenzen der Bauteile, ohne tatsächlichen Flug in den Weltraum,
beinhaltet komplexe Computermodelle und lange Testkampagnen in einer Thermal-Vakuum-
Kammer. Hierbei basieren die Computermodelle anfangs immer auf Annahmen bezüglich der
Temperaturleitfähigkeit der verschiedenen Verbindungen und Werkstoffpaarungen innerhalb
des Satelliten. Diese Annahmen werden während der Testkampagnen in einer Thermal-
Vakuum-Kammer überprüft und wenn nötig korrigiert. Da keine Thermal-Vakuum-Kammer die
dynamische Weltraumumgebung im niedrigen Erdorbit exakt nachbilden kann, werden genau
definierte Temperaturprofile gefahren um die Korrelation des Computermodells
durchzuführen. Die eigentliche Simulation eines Erdumlaufs wird dann im Computer gemacht.
Die endgültige Verifikation des Computermodells erfolgt erst wenn der Satellit im Orbit ist. Bei
First-MOVE soll dies durch die Integration von deutlich mehr Temperatursensoren als in
vergleichbaren Missionen erleichtert werden. Es wurde versucht jede größere Komponente
mit einem Temperatursensor zu bestücken. Aus diesem Grund können die insgesamt 23
Temperatursensoren zur Nutzlast des Satelliten hinzugezählt werden.
First-MOVE Datenblatt
15
Abbildung 14: An der Struktur eingeklebter Temperatursensor
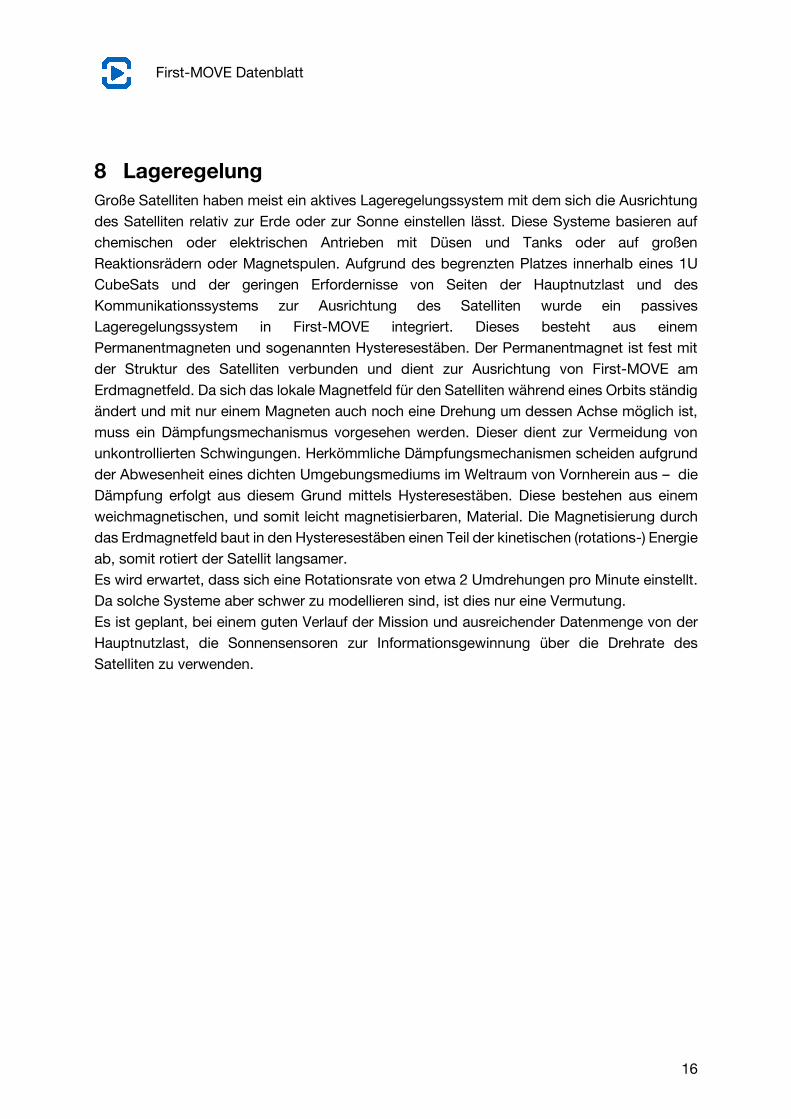
7.3 Kamera
Als dritten Bestandteil der Nutzlast ist die Kamera zu nennen. Diese Eigenentwicklung basiert
auf einem kommerziell erhältlichen 1 Megapixel CCD Chip und einem selbstgebauten
Objektiv. Die Kamera ist durch ihre geringe Auflösung für detaillierte
Erdbeobachtungsaufgaben ungeeignet, des Weiteren ist noch nicht bekannt wie das taumeln
des Satelliten die Bildqualität beeinflusst. Die Kamera dient daher allein der
Öffentlichkeitsarbeit und der Motivation der beteiligten Studenten.
Abbildung 15: Kamera, integriert mit dem OBDH Board
First-MOVE Datenblatt
16
8 Lageregelung
Große Satelliten haben meist ein aktives Lageregelungssystem mit dem sich die Ausrichtung
des Satelliten relativ zur Erde oder zur Sonne einstellen lässt. Diese Systeme basieren auf
chemischen oder elektrischen Antrieben mit Düsen und Tanks oder auf großen
Reaktionsrädern oder Magnetspulen. Aufgrund des begrenzten Platzes innerhalb eines 1U
CubeSats und der geringen Erfordernisse von Seiten der Hauptnutzlast und des
Kommunikationssystems zur Ausrichtung des Satelliten wurde ein passives
Lageregelungssystem in First-MOVE integriert. Dieses besteht aus einem
Permanentmagneten und sogenannten Hysteresestäben. Der Permanentmagnet ist fest mit
der Struktur des Satelliten verbunden und dient zur Ausrichtung von First-MOVE am
Erdmagnetfeld. Da sich das lokale Magnetfeld für den Satelliten während eines Orbits ständig
ändert und mit nur einem Magneten auch noch eine Drehung um dessen Achse möglich ist,
muss ein Dämpfungsmechanismus vorgesehen werden. Dieser dient zur Vermeidung von
unkontrollierten Schwingungen. Herkömmliche Dämpfungsmechanismen scheiden aufgrund
der Abwesenheit eines dichten Umgebungsmediums im Weltraum von Vornherein aus – die
Dämpfung erfolgt aus diesem Grund mittels Hysteresestäben. Diese bestehen aus einem
weichmagnetischen, und somit leicht magnetisierbaren, Material. Die Magnetisierung durch
das Erdmagnetfeld baut in den Hysteresestäben einen Teil der kinetischen (rotations-) Energie
ab, somit rotiert der Satellit langsamer.
Es wird erwartet, dass sich eine Rotationsrate von etwa 2 Umdrehungen pro Minute einstellt.
Da solche Systeme aber schwer zu modellieren sind, ist dies nur eine Vermutung.
Es ist geplant, bei einem guten Verlauf der Mission und ausreichender Datenmenge von der
Hauptnutzlast, die Sonnensensoren zur Informationsgewinnung über die Drehrate des
Satelliten zu verwenden.
First-MOVE Datenblatt
17
9 Missionsziele
Aufbauend auf den tatsächlichen Funktionen die das System First-MOVE hat können die Ziele
der eigentlichen Satellitenmission folgendermaßen definiert und hierarchisiert werden:
9.1 Empfang des CW und AX.25 Beacons
Das Aussenden des CW und AX.25 Beacons ist eine der grundlegendsten Funktionen von
First-MOVE. Die Funktionalität wird fast ausschließlich vom Funkgerät, einem Kaufteil,
bereitgestellt, nur der Inhalt des Beacons wird vom OBDH Board generiert. Das CW Beacon
entspricht den folgenden Zeichen in Morsecode: „MOVE1“.
Das AX.25 Beacon beinhaltet das sogenannte Snapshot Register (SR). Das SR ist eine kleine
Anzahl kritischer Telemetriewerte, zum Beispiel Batteriespannung, Ladestrom und einige
Temperaturen.
Die CW und AX.25 Beacons werden abwechselnd im Abstand von 60 Sekunden ausgesendet.
Der Empfang der Beacons bedeutet für das Erreichen der Missionsziele, dass die kritischsten
Komponenten auf dem Satelliten einwandfrei funktioniert haben. Die Solarpanele sind
rechtzeitig und vollständig ausgeklappt worden, der Bordrechner ist hochgefahren und läuft
und das Funkgerät funktioniert.
9.2 Ping-Pong-Kommunikation des Satelliten
Für einfache Kommunikationstests wurde ein Ping-Pong Datenaustauschprogramm
implementiert. Die Bodenstation sendet das Ping, ein kurzer Befehl ohne Parameter, an den
Satelliten. Wenn der Befehl am Satelliten sauber empfangen wird und korrekt decodiert und
verarbeitet wird, sendet der Satellit das Pong zurück. Dies ist ebenfalls ein kleines
Datenpaket, was nur ein leeres Datenframe beinhaltet. Somit kann die Kommandierung
verifiziert werden.
9.3 Empfang & Auswertung von Housekeeping Daten während eines Überflugs
In dem AX.25 Beacon sind die wichtigsten Werte über den Zustand des Satelliten enthalten.
Um weitere Daten abzufragen ist ein Telekommando vom Boden aus notwendig. In diesem
Kommando werden Parameter übergeben welche aktuellen Werte (z.B. Temperatur,
Spannungen, Sonnensensormesswerte,…) abgefragt werden. Im Anschluss an den Empfang
an Bord des Satelliten werden die Daten vom On-Board Computer abgefragt und an den
Boden übertragen. Das Missionsziel ist erreicht wenn diese Übertragung von der
Bodenstation empfangen werden kann und die abgefragten Werte demoduliert und angezeigt
werden.
9.4 Empfang von Experimentdaten
Wie in Kapitel 7.1 beschrieben, ist die Hauptnutzlast des Satelliten ein Experiment zur
Vermessung von Solarzellen. Jede Messung produziert ein Datenpaket was etwa 7 KB groß
ist. Während eines Überfluges werden mehrere dieser Messungen durchgeführt. In den
First-MOVE Datenblatt
18
darauffolgenden Überflügen werden dann die Messdaten heruntergeladen. Es dauert etwa
dreieinhalb Minuten um ein Datenpaket herunterzuladen. Mit einer speziellen Software
werden die Datenpakete anschließend am Boden verarbeitet und die Messwerte visualisiert.
Sobald aussagekräftige Kurven von allen vier Experimentzellen bei unterschiedlichen
Einstrahlungswinkeln der Sonne am Boden empfangen und ausgewertet wurden, ist dieses
Missionsziel erfüllt.
9.5 Empfang von Dauermessungen, insbesondere Thermaldaten
Wie in Kapitel 7.2 ist ein weiterer Bestandteil der Nutzlast von First-MOVE die große Anzahl
von Temperatursensoren. Über einen Befehl der Bodenstation kann ein Programm auf dem
Satelliten gestartet werden, welches bestimmte Temperatursensoren über einen festgelegten
Zeitraum immer wieder abfragt und die Ergebnisse in ein Datenpaket schreibt. Nach
Abschluss der Messreihe kann das Datenpaket heruntergeladen werden. Mit den
gewonnenen Thermaldaten soll das Thermalmodell des Satelliten am Boden weiter verfeinert
werden. Dieses Missionsziel ist erfüllt, wenn ein Datenpaket empfangen und ausgewertet
wurde, welches Daten von allen Temperatursensoren über einen kompletten Orbit hinweg,
also 90 Minuten, beinhaltet.
9.6 Erfolgreicher Test der HCU im Orbit
Die in Kapitel 6 beschriebene Hardcommanding Unit (HCU) ist eigentlich ein
Sicherheitsmechanismus der nur benutzt werden sollte, falls an Bord des Satelliten etwas
schief gelaufen ist, zum Beispiel ein Absturz des Betriebssystems. Die Technologie hinter der
HCU wurde zwar am Boden vielfach erfolgreich getestet, da es aber eine Neuentwicklung ist
die in dieser Form noch nie im Weltraum benutzt wurde, ist es ein Missionsziel, die
Funktionsfähigkeit des Systems nachzuweisen. Die HCU soll auch in den nachfolgenden
Satellitenprojekten des LRT zum Einsatz kommen und ein erfolgreicher Test in der
tatsächlichen Einsatzumgebung ist bei der Vermarktung von neuartigen Technologien ein
Muss. Das Missionsziel gilt als erfüllt, wenn beide möglichen Kommandos (Hard Reset und
Soft Reset) der HCU erfolgreich ausgeführt wurden.
9.7 Empfang von Bildern
Als Sahnehäubchen auf der Mission ist der Empfang von Bildern das letzte Missionsziel von
First-MOVE. Diese Funktion wurde erst spät im Entwurfsprozess zum Satelliten hinzugefügt,
daher besteht hier die größte Gefahr von Fehlern. Bilder werden während einem Überflug über
die Bodenstation in Garching per Kommando ausgelöst. Die Software an Bord des Satelliten
komprimiert das aufgenommene Bild auf eine Dateigröße von etwas unter 1 MB. Aufgrund
der sehr langsamen Datenverbindung zur Bodenstation wird es mehr als 25 längere Überflüge
über Garching benötigen um ein Bild vollständig herunter zu laden. Die Software legt daher
neben dem Bild in voller Auflösung auch eine Miniatur des Bildes an, welche nur 3 bis 7 KB
groß ist. Somit sollte es möglich sein, einige wenige Miniaturen pro Überflug herunterzuladen.
First-MOVE Datenblatt
19
Das Bild mit der vielversprechendsten Miniatur wird dann für den Download in voller
Auflösung ausgewählt. Das Missionsziel ist erfüllt, sobald ein Bild heruntergeladen ist und in
der Bodenstationssoftware angezeigt wird.
First-MOVE Datenblatt
20
10 Projektziele
10.1 Ausbildung von Studenten
Das Kernziel des Projektes war die Ausbildung von Studenten im Bereich der
Satellitentechnik. Durch die Einbindung von mehr als 70 Studenten, und zeitweise 4-5
Doktoranten an dem Lehrstuhl für Raumfahrttechnik wurde dieses Ziel äußerst erfolgreich
erreicht. Studenten konnten nicht nur im eigenen Labor praktische Erfahrungen mit Hardware
von Elektronik bis Mechanik sammeln. Vor allem die intensive Begleitung des fertigen
Satelliten durch die zahlreichen Tests vor dem Start (Temperatur und Vakuumtest, Vibrations-
und Beschleunigungstests, Elektromagnetische Kompatibilitätstests) führt zu vertieften
Einblicken in die Projektabläufe der Raumfahrtindustrie.
10.2 Sammeln von technischer Erfahrung
Vor dem Beginn des Projekts First-MOVE hatte der Lehrstuhl für Raumfahrttechnik als
Institution allenfalls theoretisches Wissen und Erfahrung in Entwicklung und Bau von
Kleinsatelliten. Das langfristige Ziel des Lehrstuhls ist neuartige Technologien für Satelliten zu
entwickeln. Um dieses Ziel zu erreichen werden auch praktische Kenntnisse im Satellitenbau
benötigt. Dieses Wissen lässt sich nur dadurch erlangen, indem man an einem
Satellitenprojekt mitwirkt, und zwar von der ersten Idee bis zur Durchführung des
Missionsbetriebst. Die vielen technischen Feinheiten und konstruktiven Details lassen sich
nicht theoretisch in Vorträgen und Seminaren vermitteln. Genau diese Dinge hat der Lehrstuhl
für Raumfahrttechnik durch seine Mitarbeiter und die vielen studentischen Arbeiten gelernt.
Über das Nachfolgeprojekt MOVE 2 ist ebenfalls gesichert, dass das Wissen am Lehrstuhl
erhalten bleibt und weiter vertieft wird, das Projektziel ist also erreicht.







