
Die Finite Elemente Methode von Galerkin furelliptische PDEs:
Lokale Basisfunktionen und Fehleranalyse
Janka Bauer
Johannes-Gutenberg Universitat Mainz
16. November 2017
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Inhalt
Die Finite Elemente Methode von Galerkin
1 WiederholungAusgangssituationGlobale Basisfunktionen
2 Lokale Basisfunktionen
3 Fehleranalyse
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Inhalt
Die Finite Elemente Methode von Galerkin
1 WiederholungAusgangssituationGlobale Basisfunktionen
2 Lokale Basisfunktionen
3 Fehleranalyse
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Ausgangssituation
Wir betrachten ein Randwertproblem mit Daten a und f:
−∇ · (a(x)∇u(x)) = f (x) , fur x ∈ D ,
mit Dirichlet-Randbedingungen.
Das zugehorige schwache Variationsproblem lautet
a(u, v) = `(v) , fur alle v ∈ V ,
wobei
a(u, v) :=
∫D
a(x)∇u(x) · ∇v(x) dx
eine Bilinearform uber V ist, und
`(v) :=
∫D
f (x)v(x) dx .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Ausgangssituation
Wir betrachten ein Randwertproblem mit Daten a und f:
−∇ · (a(x)∇u(x)) = f (x) , fur x ∈ D ,
mit Dirichlet-Randbedingungen.
Das zugehorige schwache Variationsproblem lautet
a(u, v) = `(v) , fur alle v ∈ V ,
wobei
a(u, v) :=
∫D
a(x)∇u(x) · ∇v(x) dx
eine Bilinearform uber V ist, und
`(v) :=
∫D
f (x)v(x) dx .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Globale Basisfunktionen
Galerkin: Wahle zwei endlichdimensionale Unterraume
W h ⊂W = H1g (D) und V h ⊂ V = H1
0 (D) .
Finde globale Basisfunktionen Φi , sodass
V h = span{Φ1, . . . ,ΦJ} .
Dann lasst sich das Variationsproblem (fur homogeneRandbedingungen) wie folgt umformulieren:
a(uh,Φi ) = `(Φi ) , i = 1, . . . , J
⇔J∑
j=1
uja(Φj ,Φi ) = `(Φi ) , i = 1, . . . , J
Aquivalent dazu ist das Losen des Gleichungssystems
A u = b .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Globale Basisfunktionen
Galerkin: Wahle zwei endlichdimensionale Unterraume
W h ⊂W = H1g (D) und V h ⊂ V = H1
0 (D) .
Finde globale Basisfunktionen Φi , sodass
V h = span{Φ1, . . . ,ΦJ} .
Dann lasst sich das Variationsproblem (fur homogeneRandbedingungen) wie folgt umformulieren:
a(uh,Φi ) = `(Φi ) , i = 1, . . . , J
⇔J∑
j=1
uja(Φj ,Φi ) = `(Φi ) , i = 1, . . . , J
Aquivalent dazu ist das Losen des Gleichungssystems
A u = b .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Globale Basisfunktionen
Galerkin: Wahle zwei endlichdimensionale Unterraume
W h ⊂W = H1g (D) und V h ⊂ V = H1
0 (D) .
Finde globale Basisfunktionen Φi , sodass
V h = span{Φ1, . . . ,ΦJ} .
Dann lasst sich das Variationsproblem (fur homogeneRandbedingungen) wie folgt umformulieren:
a(uh,Φi ) = `(Φi ) , i = 1, . . . , J
⇔J∑
j=1
uja(Φj ,Φi ) = `(Φi ) , i = 1, . . . , J
Aquivalent dazu ist das Losen des Gleichungssystems
A u = b .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Inhalt
Die Finite Elemente Methode von Galerkin
1 WiederholungAusgangssituationGlobale Basisfunktionen
2 Lokale Basisfunktionen3 Fehleranalyse
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Lokale Basisfunktionen
Um A und b aufzustellen, konnen wir die ElementmatrizenAk ∈ Rnrxnr und die Elementvektoren bk ∈ Rnr verwenden, mit
akpq :=
∫∆k
a(x) ∇Φkp(x) · ∇Φk
q(x) dx , p, q = 1, . . . , nr , (2, 86)
bkp :=
∫∆k
f (x) Φkp(x) dx , p = 1, . . . , nr , (2.87)
wobei Φk1 , . . . ,Φ
knr die lokalen Basisfunktionen des Elements ∆k
sind.
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Beispiel 2.57:Stuckweise lineare Elemente
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Beispiel 2.57: (Stuckweise lineare Elemente)
Sei r = 1, also nr = 3.
Betrachte ∆k mit Eckpunkten (xk1 , yk1 ), (xk2 , y
k2 ) und (xk3 , y
k3 ).
Dann gilt fur v ∈ V h
v |∆k= vk1 Φk
1 + vk2 Φk2 + vk3 Φk
3
mit den lokalen Basisfunktionen Φk1 , Φk
2 und Φk3 , wobei
Φki ∈ P1(∆k) , Φk
i =
{1, x = (xki , y
ki )
0, x = (xkj , ykj ), j 6= i .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Beispiel 2.57: (Stuckweise lineare Elemente)
Sei r = 1, also nr = 3.
Betrachte ∆k mit Eckpunkten (xk1 , yk1 ), (xk2 , y
k2 ) und (xk3 , y
k3 ).
Dann gilt fur v ∈ V h
v |∆k= vk1 Φk
1 + vk2 Φk2 + vk3 Φk
3
mit den lokalen Basisfunktionen Φk1 , Φk
2 und Φk3 , wobei
Φki ∈ P1(∆k) , Φk
i =
{1, x = (xki , y
ki )
0, x = (xkj , ykj ), j 6= i .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.57: (Stuckweise lineare Elemente)
Suche nun eine explizite Form fur Φki (x) = aix + biy + ci :xk1 yk1 1
xk2 yk2 1xk3 yk3 1
aibici
= ei , i = 1, 2, 3
→ ai , bi , ci hangen von den Knoten und der Flache |∆k | ab!
Wir konnten so nun Ak und bk bilden.
→ ineffizient!
Stattdessen: Ubergang zu einem Referenzelement ∆∗
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.57: (Stuckweise lineare Elemente)
Suche nun eine explizite Form fur Φki (x) = aix + biy + ci :xk1 yk1 1
xk2 yk2 1xk3 yk3 1
aibici
= ei , i = 1, 2, 3
→ ai , bi , ci hangen von den Knoten und der Flache |∆k | ab!
Wir konnten so nun Ak und bk bilden.
→ ineffizient!
Stattdessen: Ubergang zu einem Referenzelement ∆∗
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.57: (Stuckweise lineare Elemente)
Suche nun eine explizite Form fur Φki (x) = aix + biy + ci :xk1 yk1 1
xk2 yk2 1xk3 yk3 1
aibici
= ei , i = 1, 2, 3
→ ai , bi , ci hangen von den Knoten und der Flache |∆k | ab!
Wir konnten so nun Ak und bk bilden.
→ ineffizient!
Stattdessen: Ubergang zu einem Referenzelement ∆∗
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Referenzelement
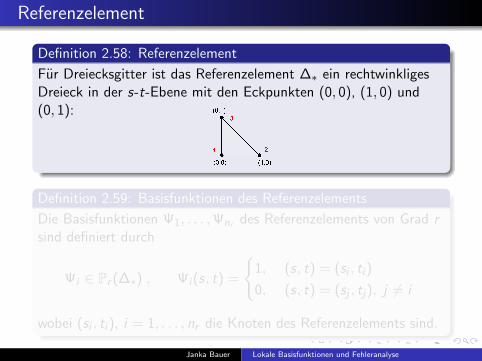
Definition 2.58: Referenzelement
Fur Dreiecksgitter ist das Referenzelement ∆∗ ein rechtwinkligesDreieck in der s-t-Ebene mit den Eckpunkten (0, 0), (1, 0) und(0, 1):
Definition 2.59: Basisfunktionen des Referenzelements
Die Basisfunktionen Ψ1, . . . ,Ψnr des Referenzelements von Grad rsind definiert durch
Ψi ∈ Pr (∆∗) , Ψi (s, t) =
{1, (s, t) = (si , ti )
0, (s, t) = (sj , tj), j 6= i
wobei (si , ti ), i = 1, . . . , nr die Knoten des Referenzelements sind.
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Referenzelement
Definition 2.58: Referenzelement
Fur Dreiecksgitter ist das Referenzelement ∆∗ ein rechtwinkligesDreieck in der s-t-Ebene mit den Eckpunkten (0, 0), (1, 0) und(0, 1):
Definition 2.59: Basisfunktionen des Referenzelements
Die Basisfunktionen Ψ1, . . . ,Ψnr des Referenzelements von Grad rsind definiert durch
Ψi ∈ Pr (∆∗) , Ψi (s, t) =
{1, (s, t) = (si , ti )
0, (s, t) = (sj , tj), j 6= i
wobei (si , ti ), i = 1, . . . , nr die Knoten des Referenzelements sind.
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.60:Stuckweise linearer Fall
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Beispiel 2.60: (Stuckweise linearer Fall)
Sei r = 1.Dann sind die stuckweise linearen Basisfunktionen zu den Knotenvon ∆∗ gegeben durch
Ψ1(x) := 1− s − t
Ψ2(x) := s
Ψ3(x) := t
Suche nun eine affine Abbildung vom Referenzdreieck ∆∗ zu jedembeliebigen ∆k ∈ Th:
x(s, t) = xk1 (1− s − t) + xk2 s + xk3 t
y(s, t) = yk1 (1− s − t) + yk2 s + yk3 t
mit (xki , yki ), i = 1, . . . , 3, die Knoten von ∆k .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.60: (Stuckweise linearer Fall)
Sei r = 1.Dann sind die stuckweise linearen Basisfunktionen zu den Knotenvon ∆∗ gegeben durch
Ψ1(x) := 1− s − t
Ψ2(x) := s
Ψ3(x) := t
Suche nun eine affine Abbildung vom Referenzdreieck ∆∗ zu jedembeliebigen ∆k ∈ Th:
x(s, t) = xk1 (1− s − t) + xk2 s + xk3 t
y(s, t) = yk1 (1− s − t) + yk2 s + yk3 t
mit (xki , yki ), i = 1, . . . , 3, die Knoten von ∆k .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.60: (Stuckweise linearer Fall)
diese Transformation einsetzen in (2.86) liefert
akpq =
∫∆∗
a(x(s, t),y(s, t)) ∇Φkp(x(s, t), y(s, t))
· ∇Φkq(x(s, t), y(s, t)) det(Jk) ds dt ,
fur p, q = 1, . . . , nr ,
wobei ∇ :=(
∂∂x ,
∂∂y
)Tund Jacobi-Matrix Jk =
(∂x∂s
∂y∂s
∂x∂t
∂y∂t
).
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.60: (Stuckweise linearer Fall)
DaΦkp(x(s, t), y(s, t)) = Ψp(s, t)
fur jedes Element ∆k ∈ Th, erhalten wir
akpq =
∫∆∗
a(x(s, t), y(s, t)) ∇Ψp(s, t) · ∇Ψq(s, t) det(Jk) ds dt ,
sowie
bkq =
∫∆∗
f (x(s, t), y(s, t)) Ψq(s, t) det(Jk) ds dt .
Achtung: es gilt immernoch ∇ :=(
∂∂x ,
∂∂y
)T!
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.60: (Stuckweise linearer Fall)
DaΦkp(x(s, t), y(s, t)) = Ψp(s, t)
fur jedes Element ∆k ∈ Th, erhalten wir
akpq =
∫∆∗
a(x(s, t), y(s, t)) ∇Ψp(s, t) · ∇Ψq(s, t) det(Jk) ds dt ,
sowie
bkq =
∫∆∗
f (x(s, t), y(s, t)) Ψq(s, t) det(Jk) ds dt .
Achtung: es gilt immernoch ∇ :=(
∂∂x ,
∂∂y
)T!
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.60: (Stuckweise linearer Fall)
Mithilfe der Jacobi-Matrizen Jk konnen wir dennoch effizientintegrieren:
Fur jede der nr Basisfunktionen Ψp eines Referenzelements gilt
∇Ψp =
(∂Ψp
∂x∂Ψp
∂y
)=
( ∂s∂x
∂t∂x
∂s∂y
∂t∂y
)(∂Ψp
∂s∂Ψp
∂t
)= J−1
k
(∂Ψp
∂s∂Ψp
∂t
).
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Beispiel 2.60: (Stuckweise linearer Fall)
...zuruck zu den Dreiecken ∆k : Hier hatten wir die Abbildungen
x(s, t) = xk1 (1− s − t) + xk2 s + xk3 t ,
y(s, t) = yk1 (1− s − t) + yk2 s + yk3 t .
Dies liefert uns
Jk =
(xk2 − xk1 yk2 − yk1xk3 − xk1 yk3 − yk1
), J−1
k =1
det(Jk)
(yk3 − yk1 yk1 − yk2xk1 − xk3 xk2 − xk1
).
Dabei hangen die Eintrage in Jk und J−1k nicht von s und t ab.
Außerdem gilt
det(Jk) = (xk2 − xk1 )(yk3 − yk1 )− (yk2 − yk1 )(xk3 − xk1 ) = 2|∆k | .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.60: (Stuckweise linearer Fall)
...zuruck zu den Dreiecken ∆k : Hier hatten wir die Abbildungen
x(s, t) = xk1 (1− s − t) + xk2 s + xk3 t ,
y(s, t) = yk1 (1− s − t) + yk2 s + yk3 t .
Dies liefert uns
Jk =
(xk2 − xk1 yk2 − yk1xk3 − xk1 yk3 − yk1
), J−1
k =1
det(Jk)
(yk3 − yk1 yk1 − yk2xk1 − xk3 xk2 − xk1
).
Dabei hangen die Eintrage in Jk und J−1k nicht von s und t ab.
Außerdem gilt
det(Jk) = (xk2 − xk1 )(yk3 − yk1 )− (yk2 − yk1 )(xk3 − xk1 ) = 2|∆k | .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Beispiel 2.61:Uniforme Gitter
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
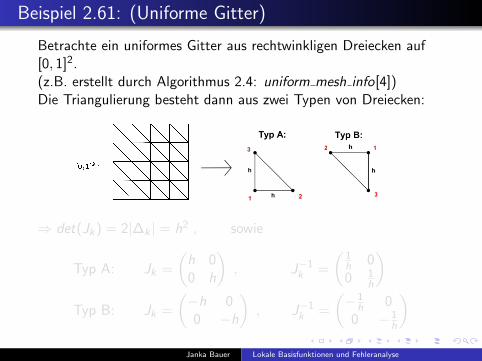
Beispiel 2.61: (Uniforme Gitter)
Betrachte ein uniformes Gitter aus rechtwinkligen Dreiecken auf[0, 1]2.(z.B. erstellt durch Algorithmus 2.4: uniform mesh info[4])Die Triangulierung besteht dann aus zwei Typen von Dreiecken:
⇒ det(Jk) = 2|∆k | = h2 , sowie
Typ A: Jk =
(h 00 h
), J−1
k =
(1h 00 1
h
)Typ B: Jk =
(−h 00 −h
), J−1
k =
(− 1
h 00 − 1
h
)Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Beispiel 2.61: (Uniforme Gitter)
Betrachte ein uniformes Gitter aus rechtwinkligen Dreiecken auf[0, 1]2.(z.B. erstellt durch Algorithmus 2.4: uniform mesh info[4])Die Triangulierung besteht dann aus zwei Typen von Dreiecken:
⇒ det(Jk) = 2|∆k | = h2 , sowie
Typ A: Jk =
(h 00 h
), J−1
k =
(1h 00 1
h
)Typ B: Jk =
(−h 00 −h
), J−1
k =
(− 1
h 00 − 1
h
)Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Beispiel 2.61: Uniforme Gitter
Nun haben wir alles Notwendige fur
akpq = 2|∆k |∫
∆∗
a(x(s, t), y(s, t)) ∇Ψp(s, t) · ∇Ψq(s, t) ds dt
bkq = 2|∆k |∫
∆∗
f (x(s, t), y(s, t)) Ψq(s, t) ds dt
fur p, q = 1, . . . , nr , wobei ∇Ψp = J−1k
(∂Ψp
∂s∂Ψp
∂t
)T.
⇒ effizientes Losen der Integrale per Quadratur moglich:Fur ein Set von Q Gewichten wi und Knoten (si , ti ) von ∆∗ folgt
akpq = 2|∆k |Q∑i=1
wia(x(si , ti ), y(si , ti )) ∇Ψp(si , ti ) · ∇Ψq(si , ti )
und analog fur bkq .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Beispiel 2.61: Uniforme Gitter
Nun haben wir alles Notwendige fur
akpq = 2|∆k |∫
∆∗
a(x(s, t), y(s, t)) ∇Ψp(s, t) · ∇Ψq(s, t) ds dt
bkq = 2|∆k |∫
∆∗
f (x(s, t), y(s, t)) Ψq(s, t) ds dt
fur p, q = 1, . . . , nr , wobei ∇Ψp = J−1k
(∂Ψp
∂s∂Ψp
∂t
)T.
⇒ effizientes Losen der Integrale per Quadratur moglich:Fur ein Set von Q Gewichten wi und Knoten (si , ti ) von ∆∗ folgt
akpq = 2|∆k |Q∑i=1
wia(x(si , ti ), y(si , ti )) ∇Ψp(si , ti ) · ∇Ψq(si , ti )
und analog fur bkq .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Zusammenfassung
Der Ubergang zum Referenzelement ermoglicht uns eineeffizientere Aufstellung von Ak und bk .
Das Integral uber das Referenzelement lasst sich perQuadraturformel losen.
Fur ”einfache” Funktionen a und f (z.B. stuckweise konstantoder Polynome) kann eine exakte Quadraturformel gefundenwerden.
Falls nicht: lose ein Problem der Form (2.69):
a(uh, v) = ˜(v) , ∀ v ∈ V h ,
wobei a(., .) und ˜(.) aus der inexakten Integration kommen.
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Zusammenfassung
Der Ubergang zum Referenzelement ermoglicht uns eineeffizientere Aufstellung von Ak und bk .
Das Integral uber das Referenzelement lasst sich perQuadraturformel losen.
Fur ”einfache” Funktionen a und f (z.B. stuckweise konstantoder Polynome) kann eine exakte Quadraturformel gefundenwerden.
Falls nicht: lose ein Problem der Form (2.69):
a(uh, v) = ˜(v) , ∀ v ∈ V h ,
wobei a(., .) und ˜(.) aus der inexakten Integration kommen.
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Inhalt
Die Finite Elemente Methode von Galerkin
1 WiederholungAusgangssituationGlobale Basisfunktionen
2 Lokale Basisfunktionen
3 Fehleranalyse
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Ubergang zum Referenzelement ∆∗ verkurzt nicht nur dieRechenzeit, sondern erleichtert auch die Fehleranalyse!
Betrachte nun:
endlichdimensionales Galerkin Problem (2.65):
a(uh, v) = `(v) , ∀ v ∈ V h
Beschrankung auf stuckweise lineare Elemente, das heißt
V h = {v ∈ C (D) mit v = 0 auf ∂D und
v |∆k∈ P1(∆k) fur alle ∆k}
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
Ubergang zum Referenzelement ∆∗ verkurzt nicht nur dieRechenzeit, sondern erleichtert auch die Fehleranalyse!
Betrachte nun:
endlichdimensionales Galerkin Problem (2.65):
a(uh, v) = `(v) , ∀ v ∈ V h
Beschrankung auf stuckweise lineare Elemente, das heißt
V h = {v ∈ C (D) mit v = 0 auf ∂D und
v |∆k∈ P1(∆k) fur alle ∆k}
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
W h die Menge der Funktionen der Form (2.78):
w(x) =J∑
i=1
wiΦi (x) +
J+JB∑i=J+1
wiΦi (x) =: w0(x) + wg (x) ,
mit w0 ∈ V h, w0|∂D = 0 und fixem wB := [wJ+1, . . . ,wJ+JB ] ,
die die Randbedingungen interpolieren.
g : ∂D → R sei ein passendes lineares Polynom, sodass
W h ⊂ H1g (D)
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
Dann folgt mit Theorem (2.49) die Abschatzung
|u − uh|E ≤ |u − w |E , ∀ w ∈W h ,
und mit
√amin |w |H1(D) ≤ |w |E ≤
√amax |w |H1(D) (2.57)
folgt weiter
|u − uh|2E ≤ amax |u − w |2H1(D)
= amax
ne∑k=1
|u − w |2H1(∆k ) , ∀ w ∈W h . (2.104)
Hier beginnt die Fehleranalyse!
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
Dann folgt mit Theorem (2.49) die Abschatzung
|u − uh|E ≤ |u − w |E , ∀ w ∈W h ,
und mit
√amin |w |H1(D) ≤ |w |E ≤
√amax |w |H1(D) (2.57)
folgt weiter
|u − uh|2E ≤ amax |u − w |2H1(D)
= amax
ne∑k=1
|u − w |2H1(∆k ) , ∀ w ∈W h . (2.104)
Hier beginnt die Fehleranalyse!
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Dann folgt mit Theorem (2.49) die Abschatzung
|u − uh|E ≤ |u − w |E , ∀ w ∈W h ,
und mit
√amin |w |H1(D) ≤ |w |E ≤
√amax |w |H1(D) (2.57)
folgt weiter
|u − uh|2E ≤ amax |u − w |2H1(D)
= amax
ne∑k=1
|u − w |2H1(∆k ) , ∀ w ∈W h . (2.104)
Hier beginnt die Fehleranalyse!
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Idee:
Betrachte eine Interpolante Ihu ∈W h.
Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
Idee:
Betrachte eine Interpolante Ihu ∈W h.
Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Idee:
Betrachte eine Interpolante Ihu ∈W h.
Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Idee:
→ Betrachte eine Interpolante Ihu ∈W h.
Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Es sei Ihu eine Interpolante der schwachen Losung u mit
Ihu(xi ) = u(xi ) , i = 1, . . . , J + JB , (2.105)
wobei xi Knoten des Gitters sind und
Ihu|∆k∈ P1(∆k) , fur alle ∆k ∈ Th . (2.106)
Die Annahme an g , W h ⊂ H1g (D), garantiert:
w = Ihu erfullt die Randbedingungen
ABER: u muss nicht stetig sein⇒ Ihu muss nicht stetig sein
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Es sei Ihu eine Interpolante der schwachen Losung u mit
Ihu(xi ) = u(xi ) , i = 1, . . . , J + JB , (2.105)
wobei xi Knoten des Gitters sind und
Ihu|∆k∈ P1(∆k) , fur alle ∆k ∈ Th . (2.106)
Die Annahme an g , W h ⊂ H1g (D), garantiert:
w = Ihu erfullt die Randbedingungen
ABER: u muss nicht stetig sein⇒ Ihu muss nicht stetig sein
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
zusatzliche Annahme: schwache Losung u ∈ H2(D)
Annahme 2.64: H2-Regularitat
Es existiert eine Konstante K2 > 0, sodass fur alle f ∈ L2(D) dieschwache Losung u zu H2(D) gehort, und es gilt
|u|H2(D) ≤ K2‖f ‖L2(D) .
Theorem 1.51⇒ u ∈ C (D)
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
zusatzliche Annahme: schwache Losung u ∈ H2(D)
Annahme 2.64: H2-Regularitat
Es existiert eine Konstante K2 > 0, sodass fur alle f ∈ L2(D) dieschwache Losung u zu H2(D) gehort, und es gilt
|u|H2(D) ≤ K2‖f ‖L2(D) .
Theorem 1.51⇒ u ∈ C (D)
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
zusatzliche Annahme: schwache Losung u ∈ H2(D)
Theorem 1.51⇒ u ∈ C (D)
Theorem 1.51
Sei D ein beschranktes Gebiet in Rd , u ∈ H r (D), r ∈ N.Falls r > d
2 kann u : D → R zu einer stetigen Funktion u : D → Rerweitert werden.
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
zusatzliche Annahme: schwache Losung u ∈ H2(D)
Theorem 1.51⇒ u ∈ C (D)
⇒ Ihu ∈W h
Theorem 1.51
Sei D ein beschranktes Gebiet in Rd , u ∈ H r (D), r ∈ N.Falls r > d
2 kann u : D → R zu einer stetigen Funktion u : D → Rerweitert werden.
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
Idee:
X Betrachte eine Interpolante Ihu ∈W h.
Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Idee:
X Betrachte eine Interpolante Ihu ∈W h.
X Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Idee:
X Betrachte eine Interpolante Ihu ∈W h.
X Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
→ Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
→ wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
Lemma 2.65
Fur alle Dreiecke ∆k ∈ Th gilt
|e|2H1(∆k ) ≤ 2
(h2k
|∆k |
)|e|2H1(∆∗) . (2.107)
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
Lemma 2.65
Fur alle Dreiecke ∆k ∈ Th gilt
|e|2H1(∆k ) ≤ 2
(h2k
|∆k |
)|e|2H1(∆∗) . (2.107)
Fur formregulare Gitter gilt nach Definition 2.54
∃ K > 0 , sdρkhk≥ K , ∀ ∆k ∈ Th
und somit
h2k
|∆k |≤
ρ2k
K 2|∆k |≤
ρ2k
K 2(πρ2
k
) ≤ 1
πK 2, ∀ ∆k ∈ Th .
⇒ die Konstante in Lemma 2.65 ist unabhangig von h nach obenbeschrankt⇒ Gitterverfeinerung moglich ohne dass der Fehler explodiert!
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
Lemma 2.65
Fur alle Dreiecke ∆k ∈ Th gilt
|e|2H1(∆k ) ≤ 2
(h2k
|∆k |
)|e|2H1(∆∗) . (2.107)
Fur formregulare Gitter gilt nach Definition 2.54
∃ K > 0 , sdρkhk≥ K , ∀ ∆k ∈ Th
und somit
h2k
|∆k |≤
ρ2k
K 2|∆k |≤
ρ2k
K 2(πρ2
k
) ≤ 1
πK 2, ∀ ∆k ∈ Th .
⇒ die Konstante in Lemma 2.65 ist unabhangig von h nach obenbeschrankt⇒ Gitterverfeinerung moglich ohne dass der Fehler explodiert!
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Lemma 2.65
Fur alle Dreiecke ∆k ∈ Th gilt
|e|2H1(∆k ) ≤ 2
(h2k
|∆k |
)|e|2H1(∆∗) . (2.107)
Fur formregulare Gitter gilt nach Definition 2.54
∃ K > 0 , sdρkhk≥ K , ∀ ∆k ∈ Th
und somit
h2k
|∆k |≤
ρ2k
K 2|∆k |≤
ρ2k
K 2(πρ2
k
) ≤ 1
πK 2, ∀ ∆k ∈ Th .
⇒ die Konstante in Lemma 2.65 ist unabhangig von h nach obenbeschrankt⇒ Gitterverfeinerung moglich ohne dass der Fehler explodiert!
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Idee:
X Betrachte eine Interpolante Ihu ∈W h.
X Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
→ Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
X wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65→ wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?→ Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Lemma 2.66
Fur jedes Dreieck ∆k ∈ Th gilt
|e|2H1(∆∗) ≤ Kh2k
(h2k
|∆k |
)|u|2H2(∆k ) , (2.108)
wobei K > 0 eine von hk unabhangige Konstante ist.
⇒ Jedes Mal, wenn wir von ∆∗ zuruck nach ∆k abbilden,bekommen wir eine Potenz von hk .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Lemma 2.66
Fur jedes Dreieck ∆k ∈ Th gilt
|e|2H1(∆∗) ≤ Kh2k
(h2k
|∆k |
)|u|2H2(∆k ) , (2.108)
wobei K > 0 eine von hk unabhangige Konstante ist.
⇒ Jedes Mal, wenn wir von ∆∗ zuruck nach ∆k abbilden,bekommen wir eine Potenz von hk .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Idee:
X Betrachte eine Interpolante Ihu ∈W h.
X Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
X Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
X wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65
X wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?
X Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66 eine h-Potenz
→ Gesamtfehlerbetrachtung fur |u − uh|2E → Theorem 2.67
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
Idee:
X Betrachte eine Interpolante Ihu ∈W h.
X Definiere den Fehler
e := u − w = u − Ihu
und den von ∆k auf ∆∗ abgebildeten Interpolationsfehler
e(s, t) = e(x(s, t), y(s, t)) .
X Suche nun eine Schranke fur |e|H1(∆k ), um alle Elementegleichzeitig betrachten zu konnen:
X wie hangt |e|H1(∆k ) von |e|H1(∆∗) ab? → Lemma 2.65
X wie hangt |e|H1(∆∗) von |u|H2(∆∗) ab?
X Gesamtfehler zuruck abbilden auf |u|H2(∆k ) → Lemma 2.66 eine h-Potenz
→ Gesamtfehlerbetrachtung fur |u − uh|2E → Theorem 2.67
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Fehleranalyse bei Finiten Elementen
dafur kombiniere:
(2.107): |e|2H1(∆k ) ≤ 2(
h2k|∆k |
)|e|2H1(∆∗)
(2.108): |e|2H1(∆∗) ≤ Kh2k
(h2k|∆k |
)|u|2H2(∆k )
(2.104): |u − uh|2E ≤ amax |u − w |2H1(D)
= amax
ne∑k=1
|u − w |2H1(∆k ) ∀ w ∈W h
zu Abschatzung in der Energienorm: |u − uh|E ∈ O(h)
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Zusammengefasst ergibt das:
Theorem 2.67
Sei u ∈W eine Losung des Variationsproblems (2.55),a(u, v) = `(v) ∀v ∈ V , und sei uh ∈W h die stuckweise lineareGalerkin-Approximation, die (2.65) erfullt, das heißta(uh, v) = `(v) ∀v ∈ V h.Falls Annahme 2.64 gilt(H2-Regularitat: ∃K2 : |u|H2(D) ≤ K2‖f ‖L2(D) ∀f ∈ L2(D))und das Finite Elemente Gitter formregular ist, dann gilt:
|u − uh|E ≤ K√amaxh‖f ‖L2(D) ,
wobei K > 0 eine von h unabhangige Konstante ist.
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Fehleranalyse bei Finiten Elementen
Korollar 2.68
Falls die Annahmen von Theorem 2.67 gelten, so gilt
|u − uh|H1(D) ≤ K h
√amax
amin‖f ‖L2(D) .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse
Abschließende Bemerkung
Bei der Implementierung der Finiten Elemente sind wir von a und fstuckweise konstant ausgegangen!
Falls die Daten nicht stuckweise konstant sind, landen wir im Fallder Galerkin-Approximation unter angenaherten Daten, das heißt
a(uh, v) = ˜(v) , ∀ v ∈ V h ,
und es ergibt sich der Fehler
|u − uh|H1(D) ≤ |u − uh|H1(D) + |uh − uh|H1(D) .
Janka Bauer Lokale Basisfunktionen und Fehleranalyse

Lokale Basisfunktionen und Fehleranalyse
Vielen Dank fur Ihre Aufmerksamkeit!
Janka Bauer Lokale Basisfunktionen und Fehleranalyse







