
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
Vektorprodukt auf beiden Seiten, ergibt:
dt
LdM
rr
=
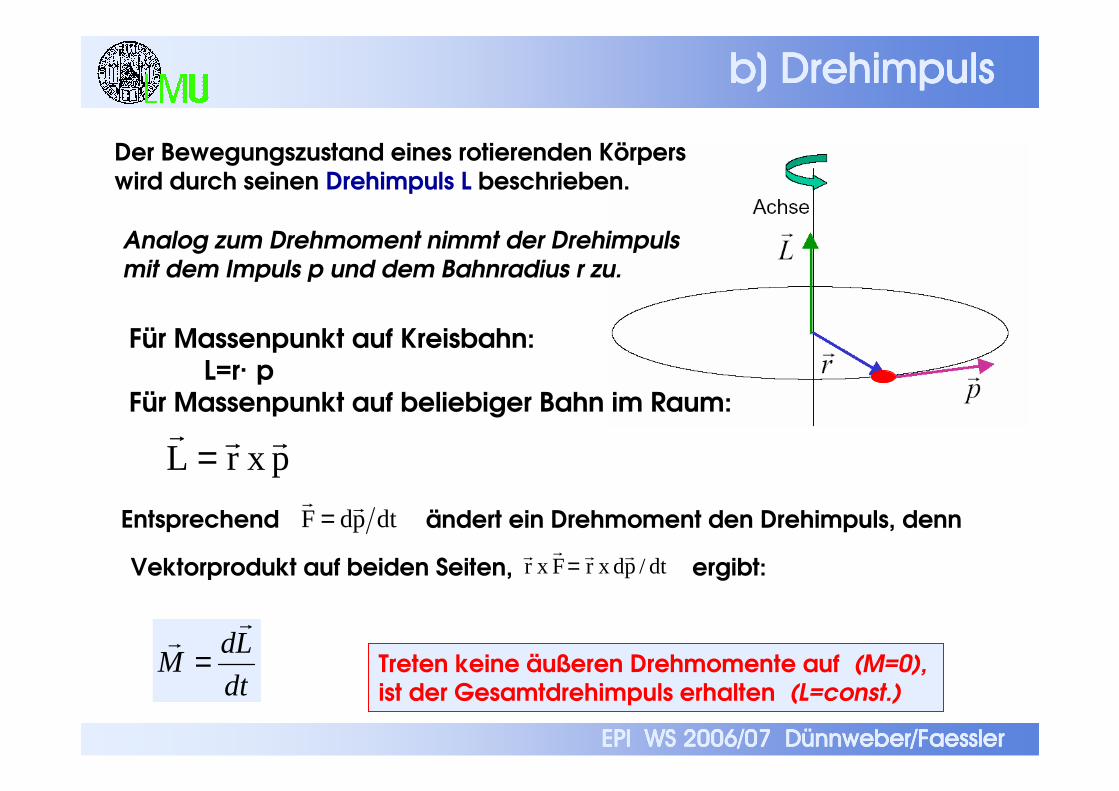
Der Bewegungszustand eines rotierenden Körperswird durch seinen Drehimpuls L beschrieben.
ändert ein Drehmoment den Drehimpuls, denn
Treten keine äußeren Drehmomente auf (M=0),ist der Gesamtdrehimpuls erhalten (L=const.)
Analog zum Drehmoment nimmt der Drehimpulsmit dem Impuls p und dem Bahnradius r zu.
dtpdFrr
=Entsprechend
b) b) b) b) DrehimpulsDrehimpulsDrehimpulsDrehimpuls
Für Massenpunkt auf Kreisbahn:L=r· p
Für Massenpunkt auf beliebiger Bahn im Raum:
pxrLrrr
=
dt/pdxrFxrrrrr
=
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
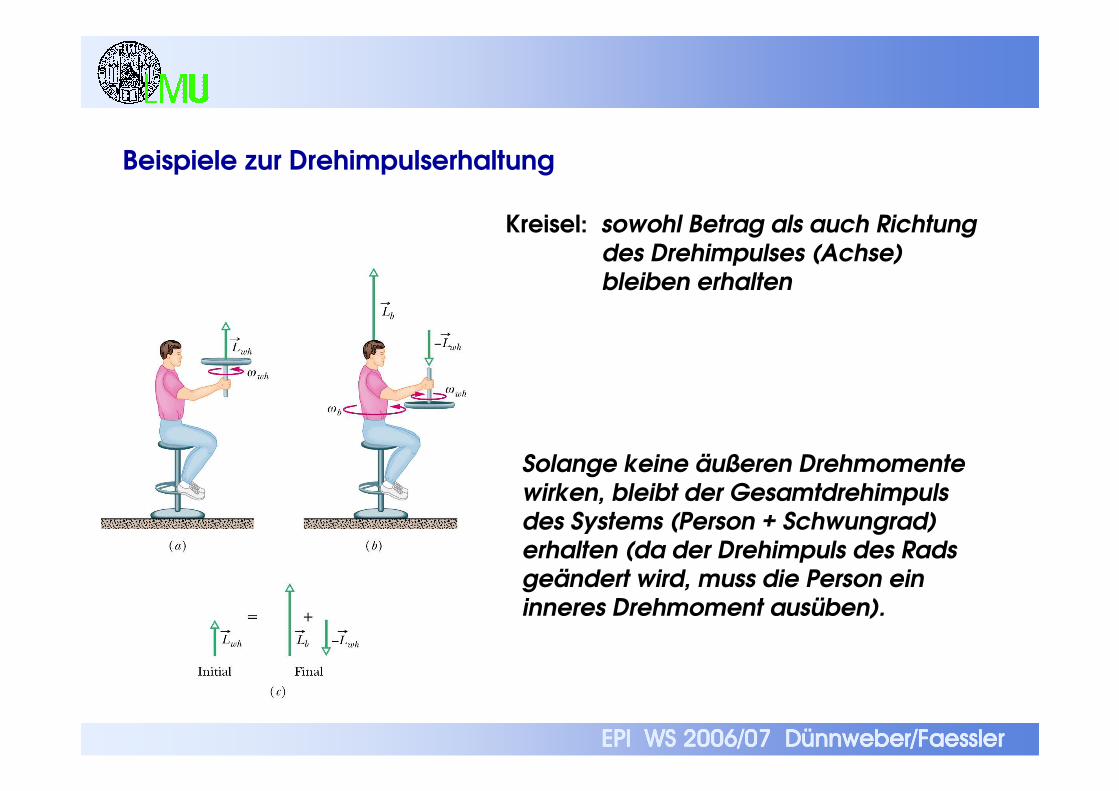
Beispiele zur Drehimpulserhaltung
Kreisel: sowohl Betrag als auch Richtung des Drehimpulses (Achse) bleiben erhalten
Solange keine äußeren Drehmomente wirken, bleibt der Gesamtdrehimpuls des Systems (Person + Schwungrad) erhalten (da der Drehimpuls des Rads geändert wird, muss die Person ein inneres Drehmoment ausüben).
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
∑ ∫ ⋅=⋅=i
2i
2ii dmRRmI
∑ ×= ii prLrrr
ω⋅= IL
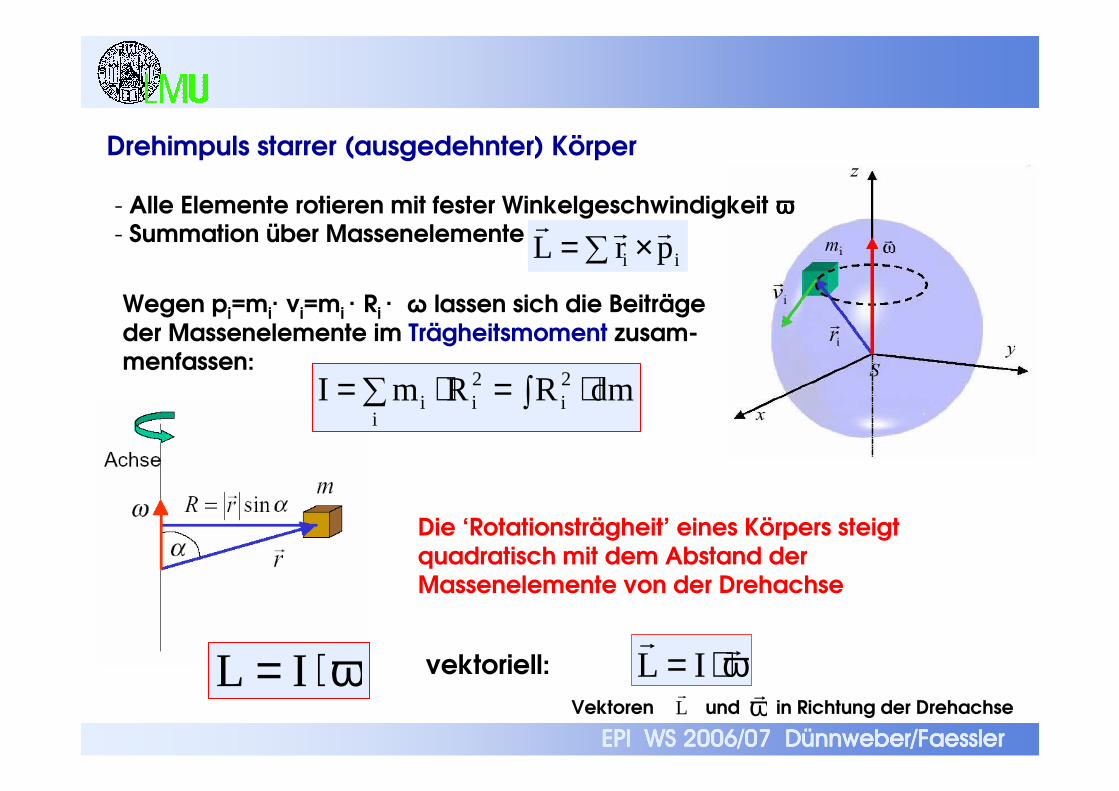
Die ‘Rotationsträgheit’ eines Körpers steigt quadratisch mit dem Abstand der Massenelemente von der Drehachse
Drehimpuls starrer (ausgedehnter) Körper
- Alle Elemente rotieren mit fester Winkelgeschwindigkeit ωωωω- Summation über Massenelemente
Wegen pi=mi· vi=mi · Ri · ω lassen sich die Beiträgeder Massenelemente im Trägheitsmoment zusam-menfassen:
vektoriell: ω⋅=rr
ILVektoren und in Richtung der DrehachseL
r
ωr

EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
ω⋅= IL ∑ ⋅=i
ii RmI 2
Beispiele zur Drehimpulserhaltung
Drehimpuls (erhalten) mit Trägheitsmoment
Bremsen der Rotation durch Ausdehnen der Massenverteilung
Rotierende Hantel:
ωωωω1
ωωωω2ωωωω3
ωωωω1 : ωωωω2 : ωωωω3 = (1/1,2) : (1/2,3):1/8
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
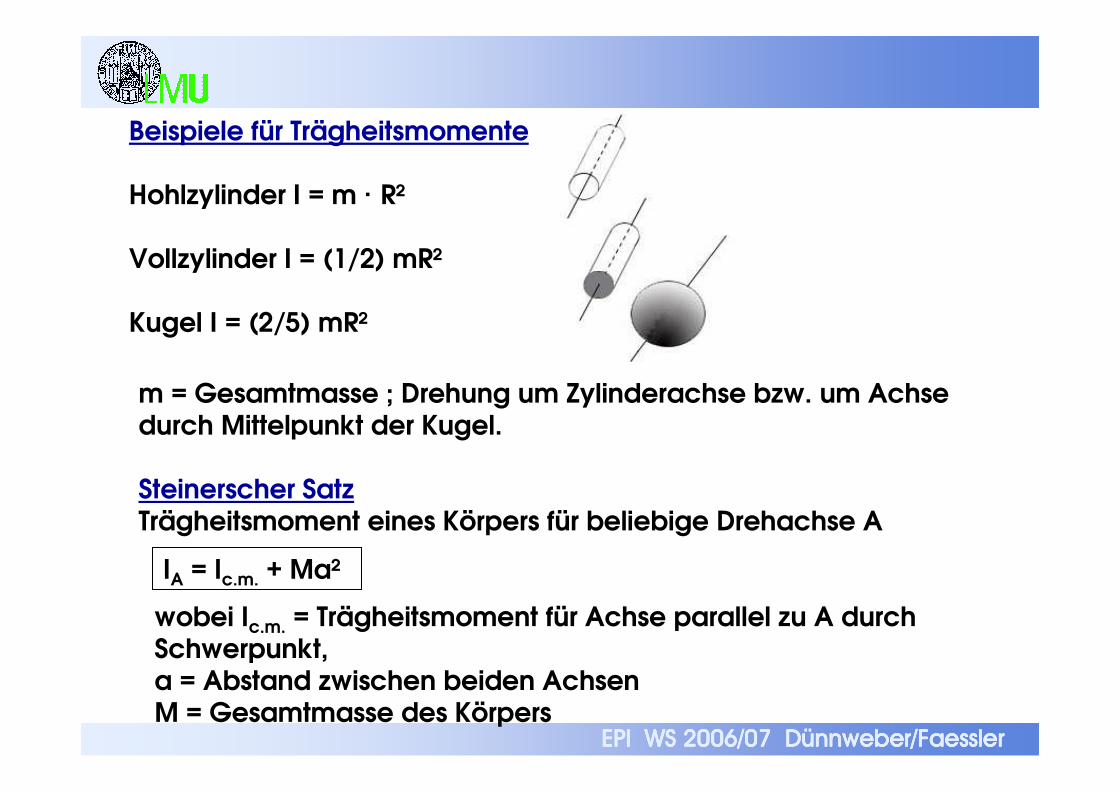
Beispiele für Trägheitsmomente
Hohlzylinder I = m · R²
Vollzylinder I = (1/2) mR²
Kugel I = (2/5) mR²
m = Gesamtmasse ; Drehung um Zylinderachse bzw. um Achsedurch Mittelpunkt der Kugel.
Steinerscher SatzTrägheitsmoment eines Körpers für beliebige Drehachse A
wobei Ic.m. = Trägheitsmoment für Achse parallel zu A durch Schwerpunkt, a = Abstand zwischen beiden AchsenM = Gesamtmasse des Körpers
IA = Ic.m. + Ma²
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
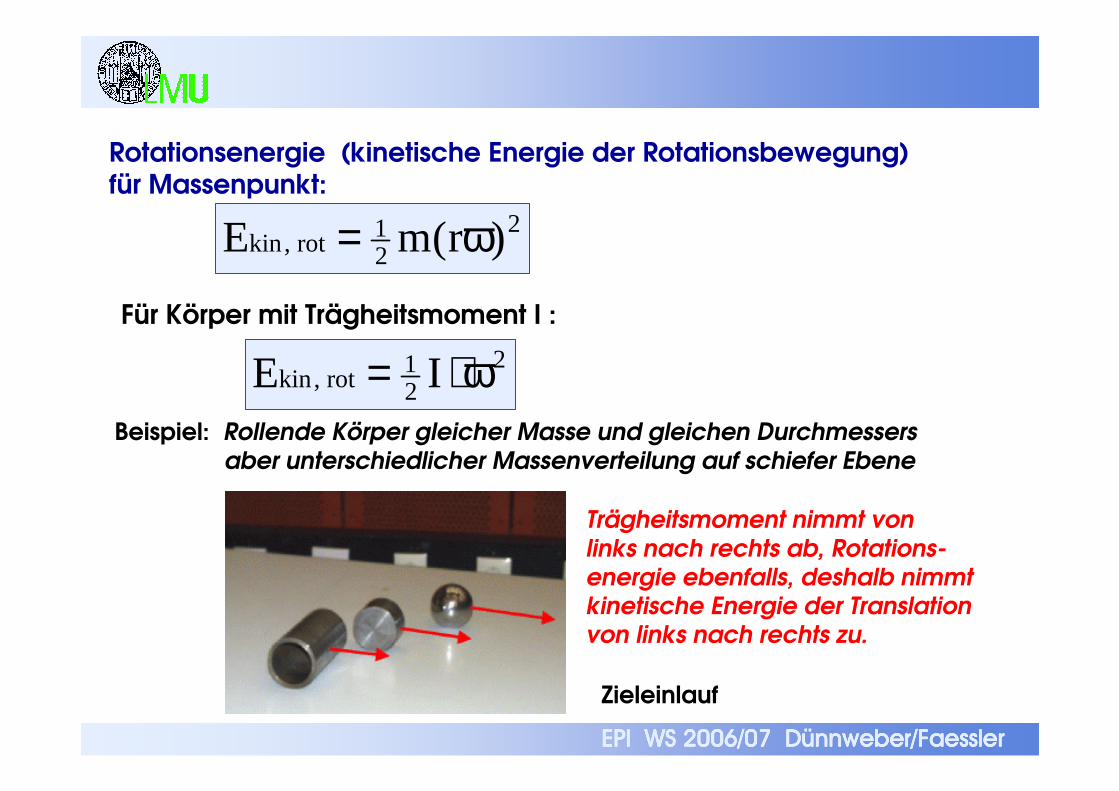
Rotationsenergie (kinetische Energie der Rotationsbewegung)für Massenpunkt:
221
rot,kin )r(mE ω=
Beispiel: Rollende Körper gleicher Masse und gleichen Durchmessers aber unterschiedlicher Massenverteilung auf schiefer Ebene
Zieleinlauf
Trägheitsmoment nimmt vonlinks nach rechts ab, Rotations-energie ebenfalls, deshalb nimmtkinetische Energie der Translationvon links nach rechts zu.
Für Körper mit Trägheitsmoment I :
221
rot,kin IE ω⋅=

EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
ImpulsDrehimpuls
KraftDrehmoment bzw.
TranslationsenergieRotationsenergie
MasseTrägheitsmoment
BeschleunigungWinkelbeschleunigung
GeschwindigkeitWinkelgeschwindigkeit
Weg Ort oderWinkel φ [rad] 42 xxsrrr −= x
r
rr
t∆ϕ∆=ω
t
sv
∆∆=r
r
t∆ω∆
t
v
∆∆
2ii rmI Σ∆= imM Σ∆=
2rot I
21
E ω= 2kin Mv
2
1E =
FxrMrrr
=
α⋅⋅= sinFrM
Fr
ω⋅= rrIL vMp
rr ⋅=
Vergleich Drehbewegung - TranslationsbewegungRotation Translation
Dynamische Gleichungen
t)I(
M∆
ω⋅∆=r
r
t
)p(F
∆∆=
vr
Mit der „Übersetzungsvorschrift“ v → ω, m → I, p → L , F → Mkönnen alle Gesetze der linearen Bewegungen (Translation) in die Drehwelt übertragen werden, z.B.
Erhaltungssätze für abgeschlossene Systeme
constL i =Σr
constpi =Σr
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
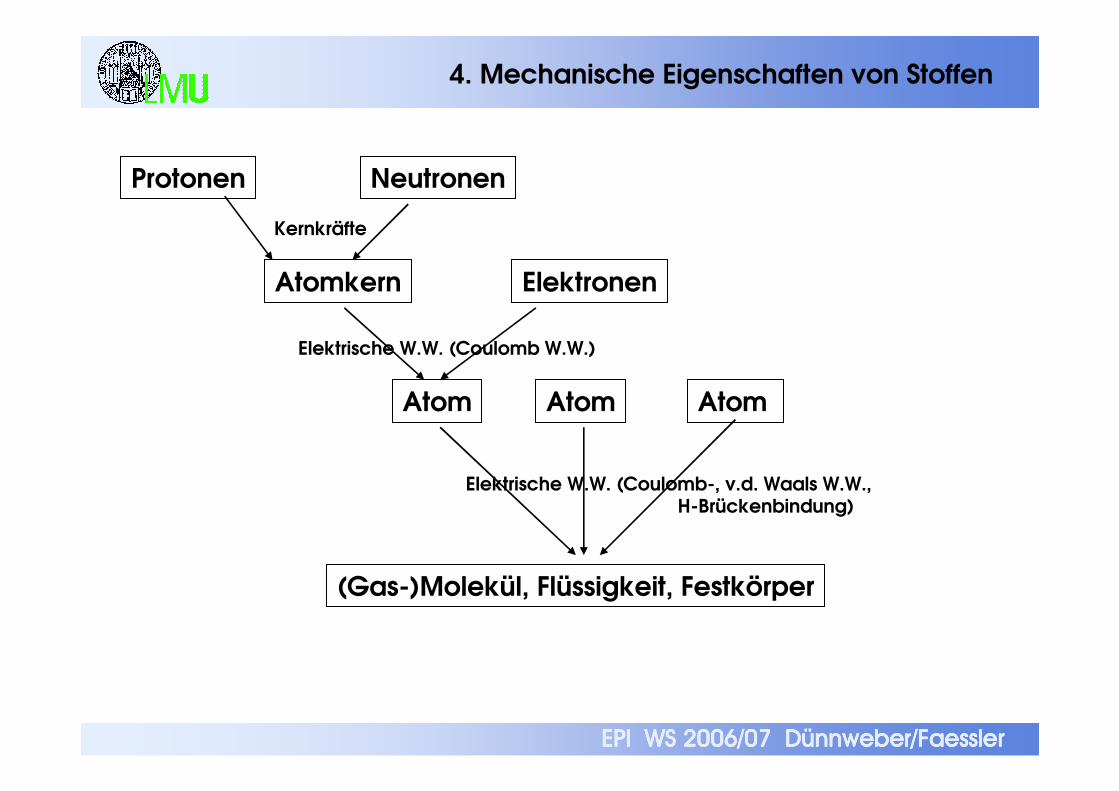
Kernkräfte
4. Mechanische Eigenschaften von Stoffen
Protonen Neutronen
Atomkern Elektronen
Elektrische W.W. (Coulomb W.W.)
Atom Atom Atom
Elektrische W.W. (Coulomb-, v.d. Waals W.W., H-Brückenbindung)
(Gas-)Molekül, Flüssigkeit, Festkörper
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
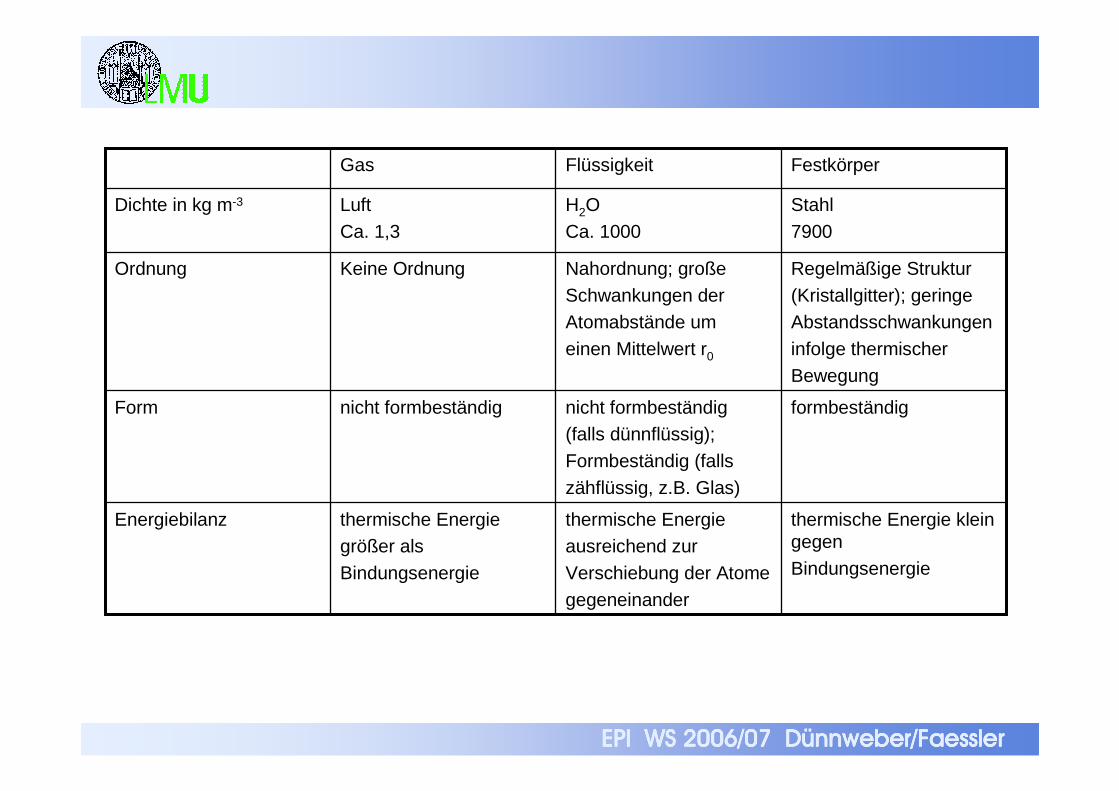
thermische Energie klein gegenBindungsenergie
thermische Energie ausreichend zur Verschiebung der Atomegegeneinander
thermische Energiegrößer als Bindungsenergie
Energiebilanz
formbeständignicht formbeständig(falls dünnflüssig); Formbeständig (falls zähflüssig, z.B. Glas)
nicht formbeständigForm
Regelmäßige Struktur (Kristallgitter); geringe Abstandsschwankungeninfolge thermischer Bewegung
Nahordnung; große Schwankungen der Atomabstände um einen Mittelwert r0
Keine OrdnungOrdnung
Stahl7900
H2OCa. 1000
LuftCa. 1,3
Dichte in kg m-3
FestkörperFlüssigkeitGas
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
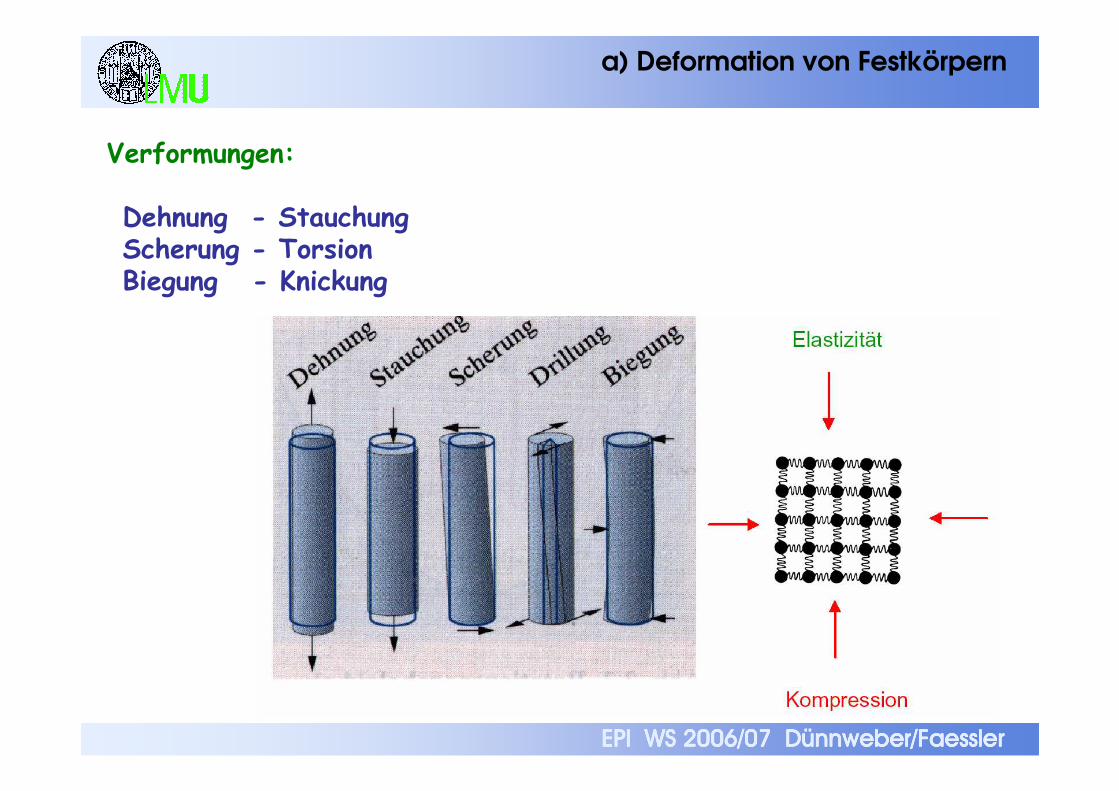
a) Deformation von Festkörpern
Verformungen:
Dehnung - StauchungScherung - TorsionBiegung - Knickung
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
a) Deformation von Festkörpern
LDL
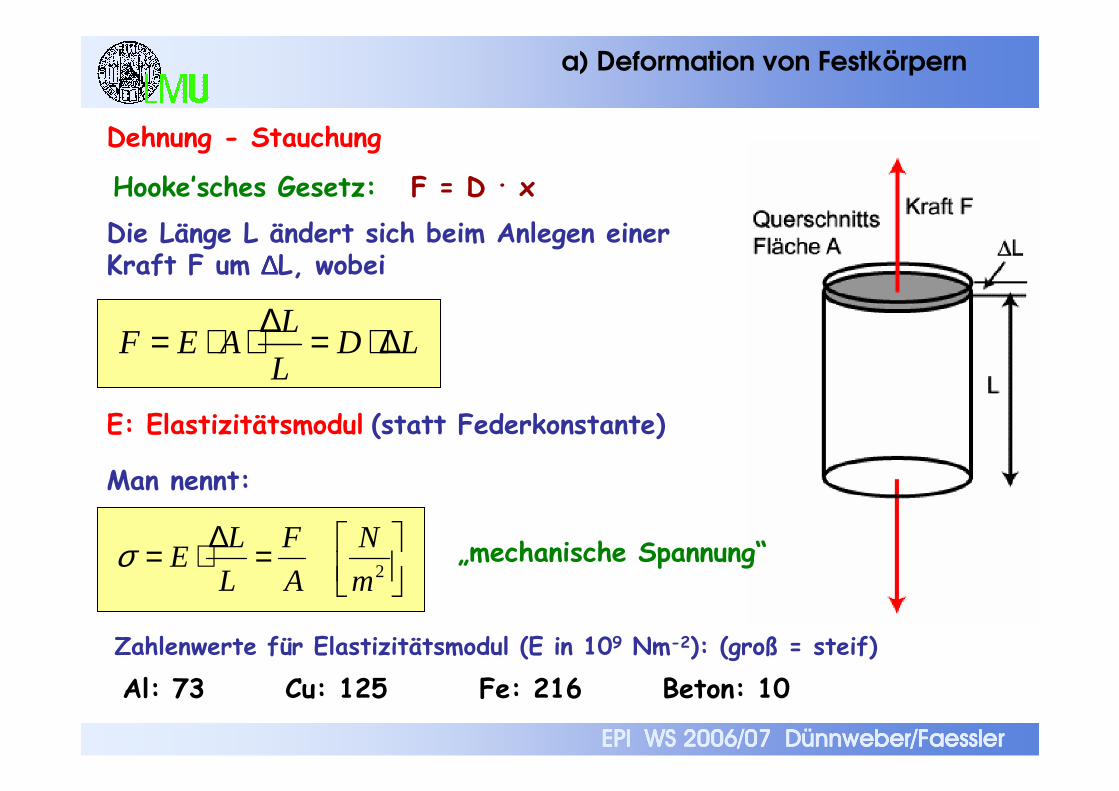
LAEF ∆⋅=∆⋅⋅=
=∆⋅=2m
N
A
F
L
LEσ
Dehnung - Stauchung
Hooke’sches Gesetz: F = D . x
Die Länge L ändert sich beim Anlegen einerKraft F um ∆∆∆∆L, wobei
E: Elastizitätsmodul (statt Federkonstante)
Man nennt:
„mechanische Spannung“
Zahlenwerte für Elastizitätsmodul (E in 109 Nm-2): (groß = steif)
Al: 73 Cu: 125 Fe: 216 Beton: 10
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
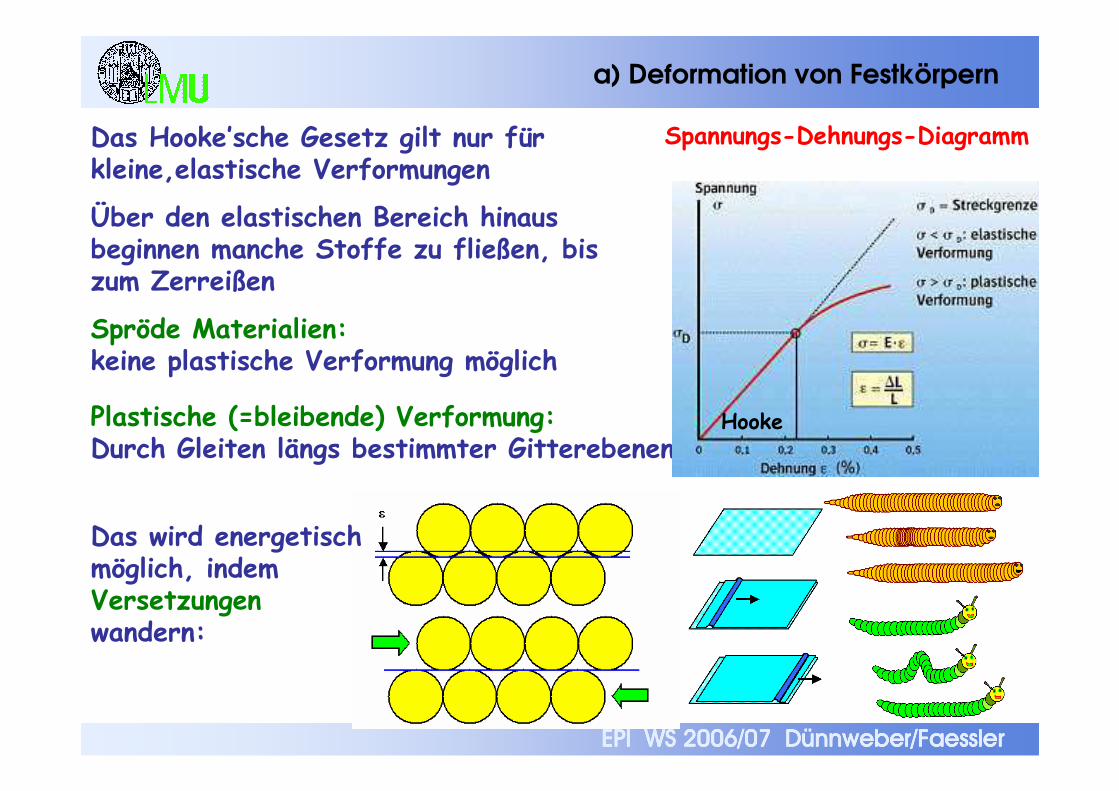
Das Hooke’sche Gesetz gilt nur fürkleine,elastische Verformungen
Über den elastischen Bereich hinausbeginnen manche Stoffe zu fließen, biszum Zerreißen
Spröde Materialien:keine plastische Verformung möglich
Plastische (=bleibende) Verformung:Durch Gleiten längs bestimmter Gitterebenen
Das wird energetischmöglich, indemVersetzungenwandern:
Spannungs-Dehnungs-Diagramm
Hooke
a) Deformation von Festkörpern
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
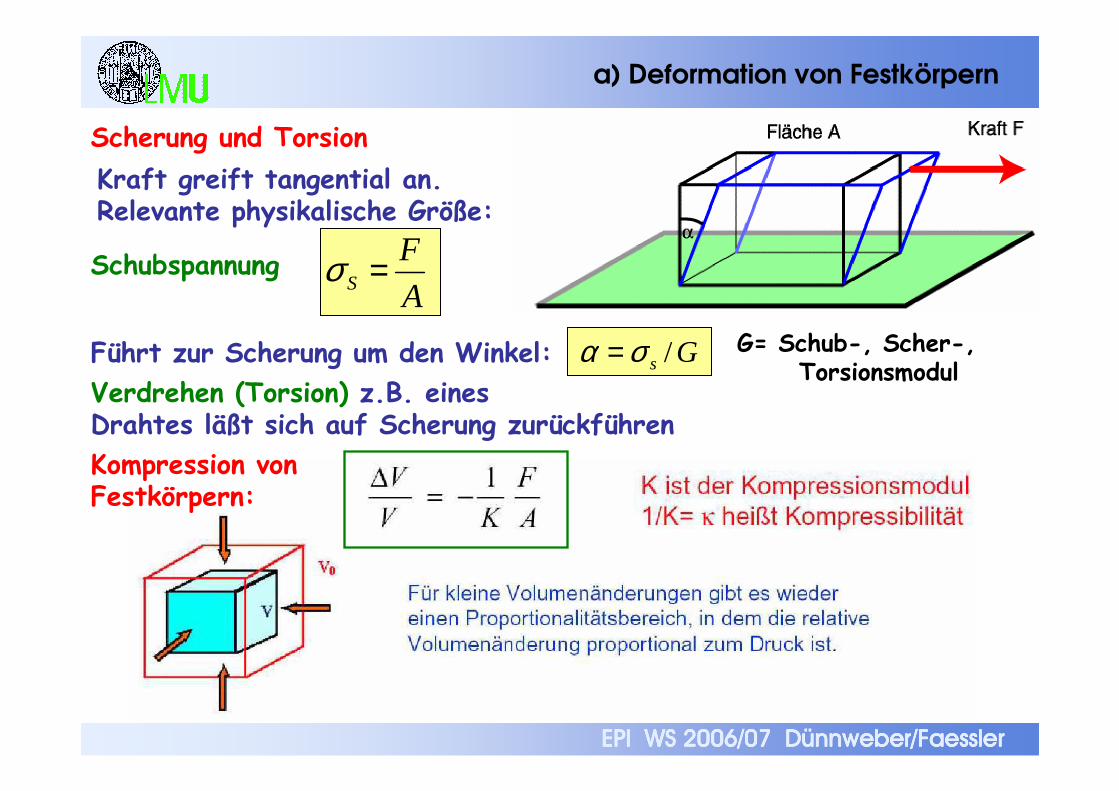
Scherung und Torsion
A
FS =σ
Gs /σα =
Schubspannung
Kraft greift tangential an.Relevante physikalische Größe:
Führt zur Scherung um den Winkel: G= Schub-, Scher-,Torsionsmodul
Verdrehen (Torsion) z.B. einesDrahtes läßt sich auf Scherung zurückführenKompression vonFestkörpern:
a) Deformation von Festkörpern

EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
Biegung und Knickung:
Bei Druckbelastung längs eines Objektes (Knochen, Balken) weichtdas Objekt aus, bis es bricht. Hier ist die Knickspannung proportionalzu E (Elastizitätsmodul)
Jenseits des elastischen Bereichs:Verformung bis zum Knicken des Balkens
außen: Zugkräfteinnen: Druckgestrichelt: “neutrale Zone”,
ändert Länge nicht
a) Deformation von Festkörpern

EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
Knochen: kleine Kristalle (50 nm) in elastischer FasermatrixSpannbeton: Beton (druckfest, nicht zugfest), kombiniert mit
Stahl (elastisch, zugfest)Kohlefaser- oder glasfaserverstärkte Plastikmaterialien
Detaillierte Beschreibung von Spannung, Druck im Knochengerüst in Kamke/Walcher(Kap. 6.3.3)
a) Deformation von Festkörpern
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
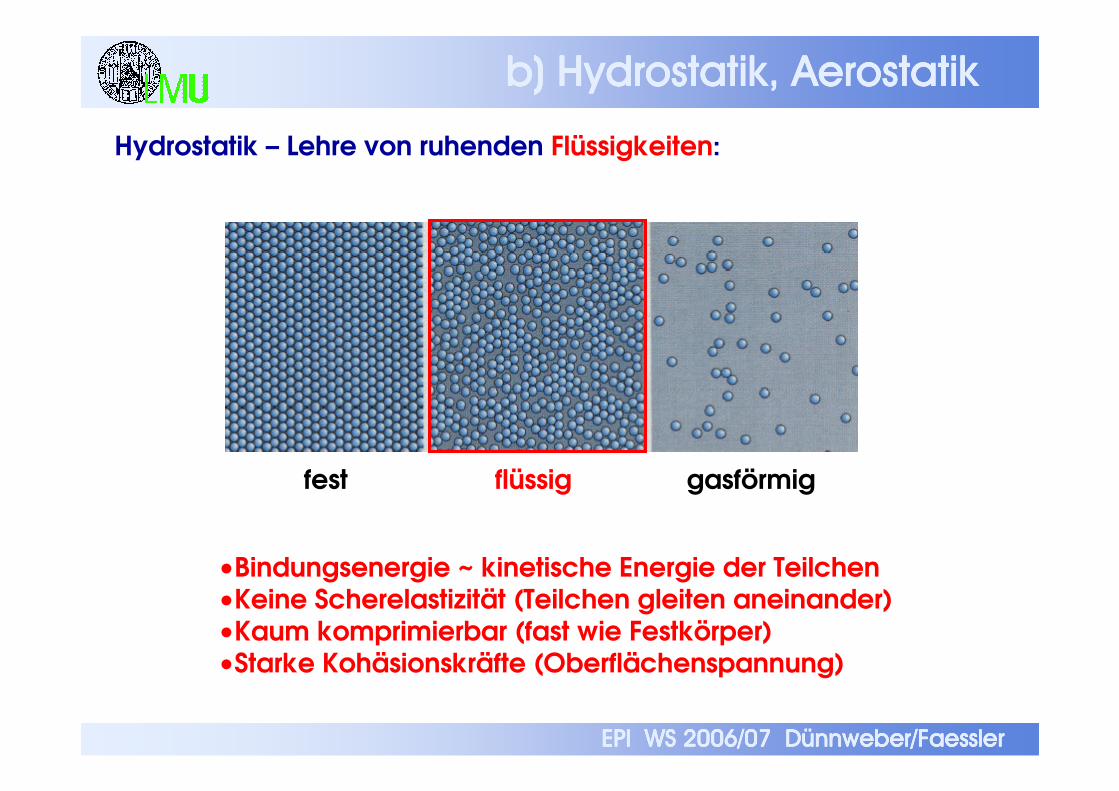
Hydrostatik – Lehre von ruhenden Flüssigkeiten:
fest flüssig gasförmig
•Bindungsenergie ~ kinetische Energie der Teilchen•Keine Scherelastizität (Teilchen gleiten aneinander)•Kaum komprimierbar (fast wie Festkörper)•Starke Kohäsionskräfte (Oberflächenspannung)
b) b) b) b) HydrostatikHydrostatikHydrostatikHydrostatik, , , , AerostatikAerostatikAerostatikAerostatik
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
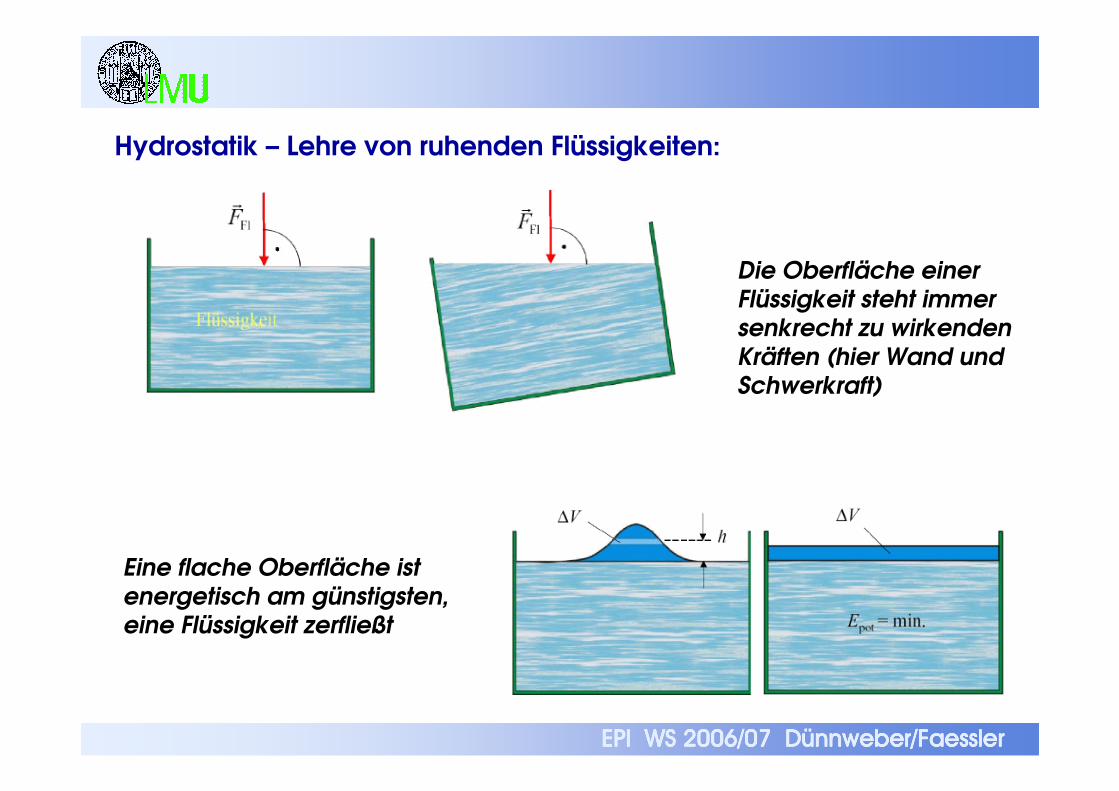
Hydrostatik – Lehre von ruhenden Flüssigkeiten:
Die Oberfläche einer Flüssigkeit steht immer senkrecht zu wirkenden Kräften (hier Wand und Schwerkraft)
Eine flache Oberfläche ist energetisch am günstigsten, eine Flüssigkeit zerfließt
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
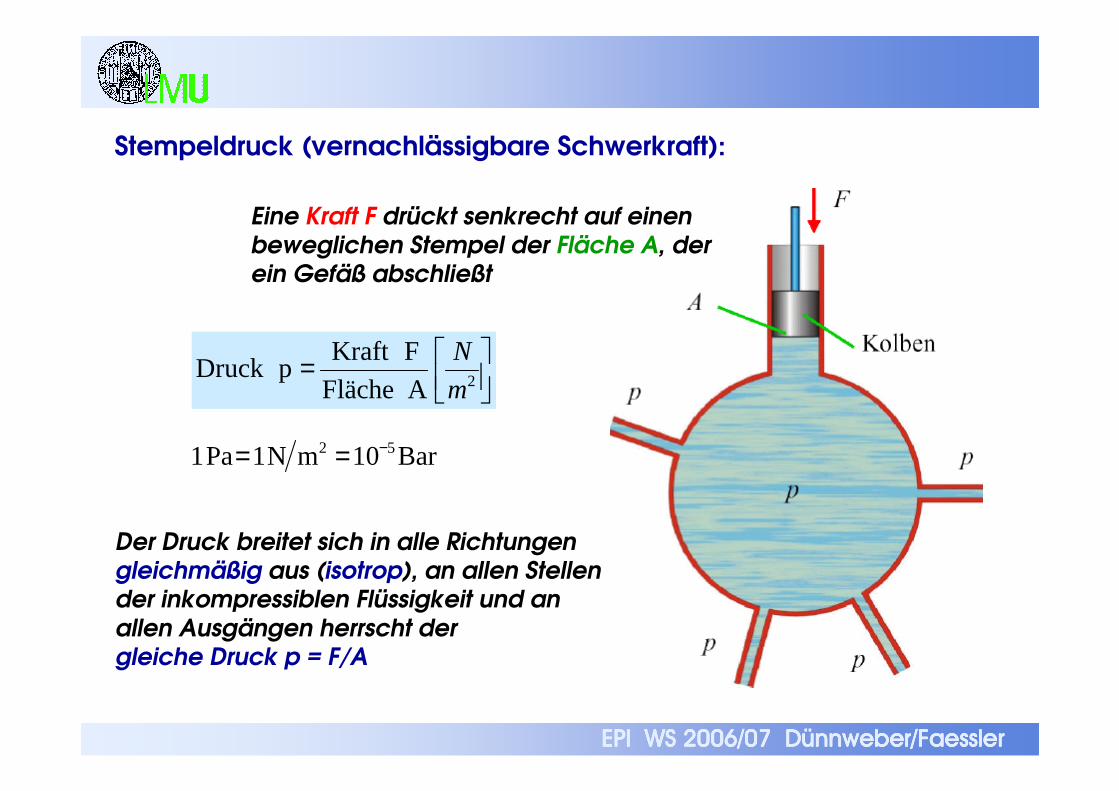
Stempeldruck (vernachlässigbare Schwerkraft):
=2A Fläche
FKraft pDruck
m
N
Bar10mN1Pa 1 52 −==
Eine Kraft F drückt senkrecht auf einen beweglichen Stempel der Fläche A, der ein Gefäß abschließt
Der Druck breitet sich in alle Richtungengleichmäßig aus (isotrop), an allen Stellender inkompressiblen Flüssigkeit und anallen Ausgängen herrscht dergleiche Druck p = F/A
EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 EPI WS 2006/07 DDDDüüüünnweber/Faesslernnweber/Faesslernnweber/Faesslernnweber/Faessler
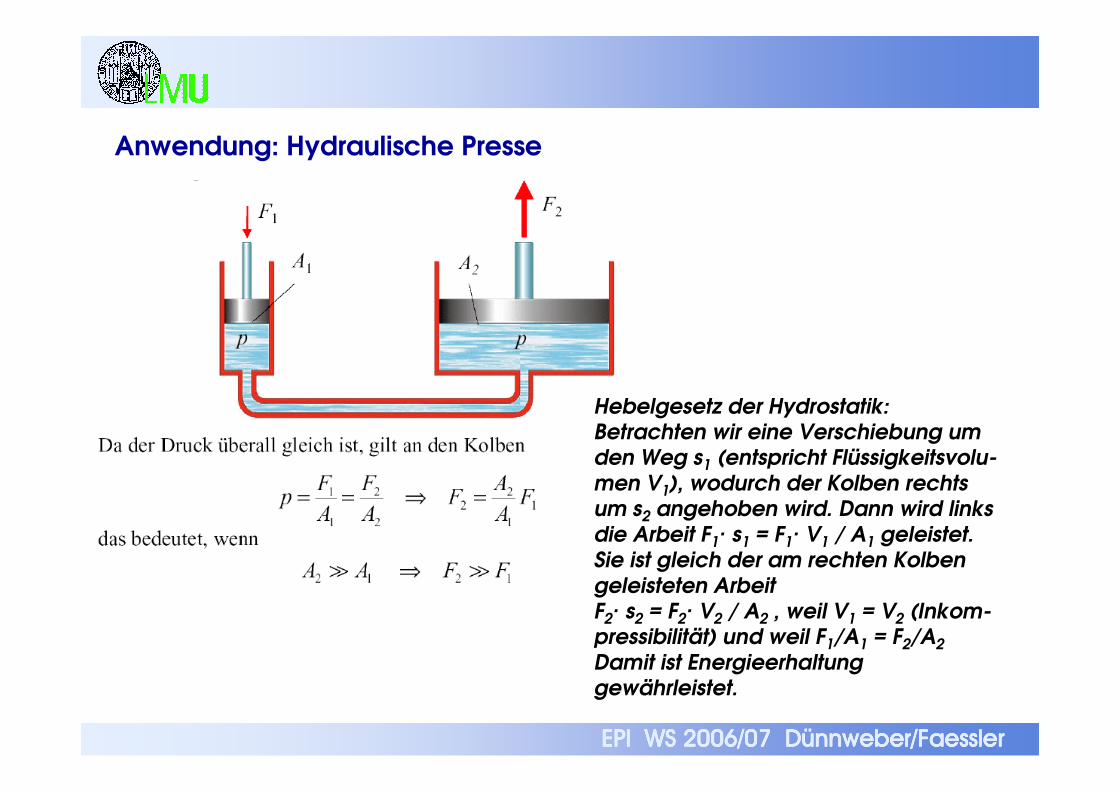
Anwendung: Hydraulische Presse
Hebelgesetz der Hydrostatik: Betrachten wir eine Verschiebung um den Weg s1 (entspricht Flüssigkeitsvolu-men V1), wodurch der Kolben rechts um s2 angehoben wird. Dann wird linksdie Arbeit F1· s1 = F1· V1 / A1 geleistet.Sie ist gleich der am rechten Kolbengeleisteten ArbeitF2· s2 = F2· V2 / A2 , weil V1 = V2 (Inkom-pressibilität) und weil F1/A1 = F2/A2
Damit ist Energieerhaltunggewährleistet.







