Interpretation im Kontext der analytischen Geometrie: liegt in der durch aufgepannten Ebene. Zurück Vektoren: Lineare Unabhängigkeit, Basis, Vektorraum, Orthogonalität Letztes Update: 29.1.2016. Navigation zu Unterthemen/wichtigen Formeln und Sätzen Skalarprodukt Projektion Vektor auf Vektor/Orthogonalzerlegung Projektion Vektor auf Unterraum Projektion Vektor auf affinen Teilraum /Hyperebene Weitere Beispiele von Vektorräumen Linearkombination, lineare Unabhängigkeit, Basis Beispiel 1: Linearkombination eines Vektors durch zwei andere Vektoren. Vieles, was Sie aus der analytischen Geometrie des dreidimensionalen Anschauungsraumes kennen, lässt sich sofort auf höhere Dimensionen übertragen. Das Vektorprodukt allerdings nicht. Leider sind dazu etliche Begriffe einzuführen, um die aus dem bekannten Objekte auf allgemeine Vektoräume zu übertragen. Sie können sich die meisten Strukturen also auch immer im veranschaulichen. Allgemein: Linearkombination eines Vektors durch Vektoren : Es gibt Zahlen , die Koordinaten von bezüglich des Vektorsystems mit: Man sagt auch: Der Vektor ist linear abhängig von den Vektoren . Vergleiche Beispiel 1. Linearkombination bedeutet im Kontext der analytischen Geometrie z.B. konkret: Stelle einen Ortsvektor eines Punktes in einer Ebene (die durch den Nullpunkt geht) durch die Richtungsvektoren dieser Ebene dar. Definition: Lineare Unabhängigkeit Die Vektoren heißen linear unabhängig, wenn gilt: In Worten: Die Linearkombination des Nullvektors durch linear unabhängige Vektoren ist nur möglich, wenn alle Koeffizienten Null sind. Die Lösung dieses (homogenen) Gleichungssystems ist dann auch der Test auf lineare Unabhängigkeit. Der Sinn ist leicht einzusehen: Wäre mindestens ein Koeffizient ungleich Null, so könnte man den zugehörigen Vektor als Linearkombinaton der anderen Vektoren darstellen. In einem Vektorsystem linear unabhängiger Vektoren, kann man keinen dieser Vektoren als Linearkombination der anderen darstellen. Wieder im bekannten Kontext der analytischen Geometrie: Zwei linear unabhängige Vektoren im sind nicht kollinear. Drei linear unabhängige Vektoren im sind nicht komplanar. Das überträgt sich also zwanglos auch auf höhere Dimensionen, in denen man sich die Veranschaulichung leider nicht mehr so einfach hinzeichnen kann. Beispiel 2: (lineare Unabhängigkeit) Sind die Vektoren in Beispiel 1 sind linear unabhängig?
Transcript
Interpretation im Kontext der analytischen Geometrie: liegt in der
durch aufgepannten Ebene.
Zurück
Vektoren: Lineare Unabhängigkeit, Basis, Vektorraum, OrthogonalitätLetztes Update: 29.1.2016. Navigation zu Unterthemen/wichtigen Formeln und Sätzen Skalarprodukt Projektion Vektor auf Vektor/Orthogonalzerlegung Projektion Vektor auf Unterraum Projektion Vektor auf affinen Teilraum /Hyperebene Weitere Beispiele von Vektorräumen
Linearkombination, lineare Unabhängigkeit, Basis
Beispiel 1: Linearkombination eines Vektors durch zwei andere Vektoren.
Vieles, was Sie aus der analytischen Geometrie des dreidimensionalen Anschauungsraumes kennen, lässt sich sofort auf höhereDimensionen übertragen. Das Vektorprodukt allerdings nicht. Leider sind dazu etliche Begriffe einzuführen, um die aus dem bekannten Objekte auf allgemeine Vektoräume zu übertragen. Sie können sich die meisten Strukturen also auch immer im veranschaulichen.
Allgemein: Linearkombination eines Vektors durch Vektoren :
Es gibt Zahlen , die Koordinaten von bezüglich des Vektorsystems mit:
Man sagt auch: Der Vektor ist linear abhängig von den Vektoren .
Vergleiche Beispiel 1. Linearkombination bedeutet im Kontext der analytischen Geometrie z.B. konkret: Stelle einen Ortsvektor einesPunktes in einer Ebene (die durch den Nullpunkt geht) durch die Richtungsvektoren dieser Ebene dar.
Definition: Lineare Unabhängigkeit
Die Vektoren heißen linear unabhängig, wenn gilt:
In Worten: Die Linearkombination des Nullvektors durch linear unabhängige Vektoren ist nur möglich, wenn alle Koeffizienten Nullsind. Die Lösung dieses (homogenen) Gleichungssystems ist dann auch der Test auf lineare Unabhängigkeit. Der Sinn ist leichteinzusehen: Wäre mindestens ein Koeffizient ungleich Null, so könnte man den zugehörigen Vektor als Linearkombinaton der anderenVektoren darstellen. In einem Vektorsystem linear unabhängiger Vektoren, kann man keinen dieser Vektoren als Linearkombinationder anderen darstellen.
Wieder im bekannten Kontext der analytischen Geometrie: Zwei linear unabhängige Vektoren im sind nicht kollinear. Drei linearunabhängige Vektoren im sind nicht komplanar. Das überträgt sich also zwanglos auch auf höhere Dimensionen, in denen mansich die Veranschaulichung leider nicht mehr so einfach hinzeichnen kann.
Beispiel 2: (lineare Unabhängigkeit) Sind die Vektoren in Beispiel 1 sind linear unabhängig?
= = 1 + 3 = 1 + 3 ,v ⎛⎝⎜
7−2
3
⎞⎠⎟ v1
→v2→ ⎛
⎝⎜710
⎞⎠⎟
⎛⎝⎜
0−1
1
⎞⎠⎟
v
,v1→
v2→
IR3
IR3
IR3
v n , , . . . . ,v1→
v2→
vn→
,.. . . ,x1 xn v , , . . . . ,v1→
v2→
vn→
= + +.. .+v x1 v1→
x2 v2→
xnvn→
v , , . . . . ,v1→
v2→
vn→
, ,. . . . ,v1→
v2→
vn→
0 = + +.. . .+ ⟹ 0 = = = =.. . .=x1 v1→
x2 v2→
xnvn→
x1 x2 x3 xn
IR3
IR3
, ,v1→
v2→
⎛ ⎞ ⎛ ⎞ ⎛ ⎞ ⎛ ⎞
Wir vergleichen den Nullvektor links komponentenweise mit dem Vektor rechts und erhalten so die drei Gleichungen:
Offenbar ist die einzige Lösung, also sind die beiden Vektoren linear unabhängig. Ihr Spannraum ist eine Ebene im .
Frage: Wie könnte man die Vektoren durch einen dritten Vektor zu einer Basis des ergänzen?
Vektorraum
Die Menge aller Linearkombinationen von n linear unabhängigen Vektoren erzeugt einen Vektorraum der Dimension n. DieseVektoren bilden dann eine Basis des Vektorraums, sie spannen ihn durch ihre Linearkombinationen auf. Sie bilden einKoordinatensystem. Die Koordinaten, mit denen man einen Vektor darstellt, (Beispiel 1) hängen also vom gewähltenKoordinatensystem (der Basis) ab! Wechselt man das Koordinatensystem (Basis) so muss man auch sie umrechnen! Auch daskennen Sie schon aus der analytischen Geometrie, Ebene, Wechsel der Richtungsvektoren. Man schreibt:
Beispiele: , die Dimension steht im Index oben.
Definition Vektorraum: Ein Vektorraum über einem Zahlkörper von Skalaren (z.B. reelle oder komplexe Zahlen) ist eineMenge, in der eine Vektoraddition und eine skalare Multiplikation erklärt ist, und die bezüglich dieser beiden Operationenauch abgeschlossen ist. Es muss also immer gelten (Abgeschlossenheit):
Alternativ kann man diese beiden Bedingungen auch als eine schreiben:
Beispiele: , die Dimension steht im Index oben.
Beispiel 3: Die sogenannten Einheitsvektoren des kartesischen Koordinatensystems sind stets linear unabhängig, wie man sofortsieht, hier am Beispiel :
Lineare Unabhängigkeit:
Diese Basis hat den Vorteil, dass man die Koordinaten zu einem gegebenen Vektor sofort ablesen kann. Zu aus Beispiel 1 etwa
Man sieht so zugleich, dass diese Vektoren den gesamten Vektorraum erzeugen. Die folgenden Vektoren auch linearunabhängig.
Ferner: Die drei Vektoren sind linear abhängig, ( ). Die drei Vektoren sind linear unabhängig.
Aufgabe: Bestimme die Koordinaten des in Beispiel 1 gegebenen Vektors bezüglich der Basis löse also:
Die Darstellung eines Vektors bezüglich einer gegebenen Basis (=Bestimmung der Koordinaten eines Vektors in einengegebenen Koordinatensystem) bedeutet also stets die Lösung eines linaren Gleichungssystems. Die gesuchtenKoordinaten sind die Unbekannten. Ein Algorithmus dazu im nächsten Abschnitt über lineare Gleichungen.
Erzeugendensystem : Betrachtet man allgemein eine Menge von Vektoren, die einen Vektorraum aufspannen, so spricht man voneinem Erzeugendensystem. Dieses kann jedoch auch linear abhängige Vektoren enthalten. Ein Erzeugendensystem, das nur auslinear unabhängigen Vektoren besteht, ist dann eine Basis. Eine Basis ist also immer ein linear unabhängiges Erzeugendensystem. Beispiel: Betrachte die Vektoren aus Beispiel 3:
Erzeugendensystem des z.B. , jedoch keine Basis, da linear abhängig! Basen des wären etwa folgende Teilmengen dieses Erzeugendensystems:
oder
ist keine Basis, weil es kein Erzeugendensystem ist (dritte Komponente aller drei Vektoren ist Null!).
Untervektorraum Eine Teilmenge der Basis spannt einen Untervektorraum auf.
Beispiel: Etwa eine Ebene im , die durch die Nullpunkt verläuft. Mit den Vektoren aus Beispiel 3 z.B. . Verschiebtman einen solchen Teilraum mit einem festen Vektor, so nennt man dies auch einen affinen Teilraum oder Hyperebene. Bereits bekanntes Beispiel : Eine Ebene im , die nicht durch den Nullpunkt verläuft, mit Aufpunkt/Verschiebungsvektor.
Frage: Welche der beiden folgenden Ebenengleichungen beschreibt eine Ebene, die durch den Nullpunkt verläuft (zweidimensionalerUnterraum des ) und welche eine mit Aufpunkt verschobene Ebene (affiner Teilraum)?
Stellen Sie auch die Ebenen mit Aufpunkt und Richtungsvektoren dar.
Orthogonalität, Orthogonale (orthonormale) Basis erleichtert viele Rechnungen!
Definition Skalarprodukt allgemein. Das Skalarprodukt auf einem reellen Vektorraum ist eine Abbildung , die in beiden Argumenten linear ist (sog.Bilinearform):
die Symmetriebedingung
erfüllt und positiv definit ist:
Andere Notationen des Skalarprodukts (Physik) Das Skalarprodukt definiert ein Längenmaß für Vektoren:
0 = = + + = ⇒ = 0 ⇒ = 0 ⇒ = 0⎛⎝⎜
000
⎞⎠⎟ x1
⎛⎝⎜
100
⎞⎠⎟ x2
⎛⎝⎜
110
⎞⎠⎟ x3
⎛⎝⎜
111
⎞⎠⎟
⎛⎝⎜
+ +x1 x2 x3
+x2 x3
x3
⎞⎠⎟ x3 x2 x1
II = span{ , , }R3 w1→
w2→
w3→
, ,e1→
e2→
w2→
1 + 1 =e1→
e2→
w2→
, ,e1→
e2→
w3→
v , , ,w1→
w2→
w3→
= + + .v x1w1→
x2w2→
x3w3→
IR3 , , ,e1→
e2→
e3→
w3→
IR3
, ,e1→
e2→
e3→
, ,e1→
e2→
w3→
, ,e1→
e2→
w2→
IR3span( , )w1
→w2→
IR3
E : + span( , ), z.B. = + t + s , t,s,∈ IRp v1→
v2→ ⎛
⎝⎜x
y
z
⎞⎠⎟
⎛⎝⎜
111
⎞⎠⎟
⎛⎝⎜
710
⎞⎠⎟
⎛⎝⎜
0−1
1
⎞⎠⎟
IR2
: 2x − y + 3z = 5, : 2x + y + 3z + 5 = 5E1 E2
∙ : V × V → IR
(tv) ∙ w = t(v ∙ w) = v ∙ (tw), v,w ∈ V ,t ∈ IR
(v + u) ∙ w = v ∙ w + u ∙ w, v ∙ (w + u) = v ∙ w + v ∙ u, u,v,w ∈ V
v ∙ w = w ∙ v
v ∙ v ≥ 0, v ∙ v = 0 ⇔ v = 0
⟨v,w⟩,⟨v|w⟩, (v|w).
∥v∥ = v ∙ v− −−−√
Es gilt die Ungleichung
Ferner für das Längenmaß (Norm)
Bemerkung: Einen Vektorraum, der mit einem Skalarprodukt versehen wird und der bezüglich des vom Skalarprodukts induziertenLängenmaßes (Metrik, Norm) vollständig ist (Cauchyfolgen sind konvergent) nennt man auch Hilbertraum. OrthogonalBasen ineinem solchen Raum werden dementsprechend oft HilbertBasen genannt (Physik, Nachrichtentechnik). Definition: Zwei Vektoren heißen orthogonal bezüglich wenn
Länge und orthonormale Vektorsysteme
Durch das Skalarprodukt ist wie schon in den bekannten Vektorräumen auch allgemeiner ein Längenmaß für Vektorengegeben. Man definiert die (sogenannte euklidische ) Länge eines Vektors ganz analog
Für den Vektorraum erhält man mit dem üblichen Skalarprodukt
so das Längenmaß
wie für n=2,3 schon aus der Schule bekannt. Ebenso kann man analog einen Winkel zwischen zwei Vektoren berechnen:
Besteht die Basis eines Vektorraums nur aus paarweise orthogonalen Vektoren mit der Länge 1, so nennen wir sie orthonormalDurch Division durch die Länge eines Vektors können wir jeden auf die Länge 1 normieren. Somit kann man aus einer orthogonalenauch stets einfach eine orthonormale Basis herstellen.
Satz:Orthogonalsysteme sind immer linear unabhängig: Auch dies kennen Sie bereits aus dem Spezialfall . Zwei aufeinander senkrecht stehende Vektoren spannen eine Ebene auf.Nimmt man einen dritten orthogonalen z.B. als deren Vektorprodukt dazu, so kann man den ganzen Raum aus derenLinearkombinationen aufspannen.
Definition: Zwei Vektoren heißen orthogonal bezüglich wenn
Satz: n paarweise bezüglich dieses Skalarprodukts orthogonale (aufeinander senkrecht stehende) Vektoren sind dann stetslinear unabhängig und spannen damit einen Vektorraum der Dimension n auf.
Die lineare Unabhängigkeit ist schnell einzusehen. sei ein Orthogonalsystem. Wir bilden ein Skalarprodukt
eines Vektors mit der Gleichung
und nutzen die Orthogonalität aus:
Damit ergibt sich nacheinander für dann
(Vgl das analoge Vorgehen bei Ebenengleichungen, Multiplikation mit Normalenvektor, Skalarform/implizite Form derEbenengleichung).
|v ∙ w| ≤ ∥v∥∥w∥
|∥v∥ − ∥w∥| ≤ ∥v ± w∥ ≤ ∥v∥ + ∥w∥, ∥tw∥ = |t|∥w∥, t ∈ IR
, ∈ Vv u ∙
∙ = 0v u
I ,IR2 R3
∥ ∥ =v ∙v v − −−−√
IRn
∙ = + +.. . . . .v w v1w1 v2w2 vnwn
∥ ∥ = = , v ∈ Iv ∙v v − −−−√ + +.. . . . .v21 v2
2 v2n
− −−−−−−−−−−−−−√ Rn
;v w
∙ = cos(ϕ( ; )) ⋅ ∥ ∥∥ ∥ ⇒ ϕ( ; ) = arccos( )v w v w v w v w ∙v w
Man kann die Orthogonalität auch nutzen, um sehr einfach die Koordinaten in einer Linearkombination zu bestimmen, wenn maneinen Vektor durch eine Basis darstellen (nach dieser Basis entwickeln) will. Das ist einer der wesentlichen Vorteile orthogonalerBasen.
Beispiel 4(Vorteil der Orthogonalität): Gesucht sind die Koordinaten von bezüglich einer Orthogonalen Basis:
Da die Vektoren auf der rechten Seite der Gleichung alle orthogonal sind, somit eine orthogonale Basis des bilden, kann man die Koordinaten von fast sofort hinschreiben, ohne dafür ein 3x3 Gleichungssystem mit dem GaußAlgorithmus
lösen zu müssen. Man bildet dazu nacheinander das Skalarprodukt links und rechts in der Gleichung mit .
Analog für somit:
Allgemeine Koordinatendarstellung in einem Orthogonalsystem
Gesucht seien die Zahlen . Wenn die Vektoren nicht paarweise orthogonal sind, muss man dazu ein Gleichungssystemlösen (siehe nächstes Kapitel). Sind sie paarweise orthogonal, so kann man die wie im Beispiel 4 sofort hinschreiben:
denn
Denn Orthogonalsysteme werden wir im Abschnitt zu Eigenwerten/Eigenvektoren näher betrachten.
Projektion eines Vektors auf einen anderen, Orthogonalzerlegung
Auch die Projektion eines Vektors auf einen anderen lässt sich direkt vom auf höhere Dimensionen übertragen. Die Formel bleibtdieselbe, die Begründung dazu auch:
Gegeben zwei Vektoren Bestimme eine Linearkombination aus beiden Vektoren, die senkrecht (orthogonal) zu ist
Damit ist auch die Gleichung erfüllt (siehe Skizze) und ist dann die Projektion von auf
Damit überträgt sich auch die Darstellung eines Vektors als Summe aus seiner Projektion auf einen anderen Vektor und die
, ,x1 x2 x2 v
= = + + = + +v ⎛⎝⎜
7−2
3
⎞⎠⎟ x1
⎛⎝⎜
10
−1
⎞⎠⎟ x2
⎛⎝⎜
121
⎞⎠⎟ x3
⎛⎝⎜
1−1
1
⎞⎠⎟ x1 v1
→x2 v2
→x3 v3
→
,k = 1,2,3vk→
IR3
v
, ,v1→
v2→
v3→
4 = ∙ = ∙ ( + + ) = ∙ + 0 + 0 = 2 ⇒ = 4/2 = 2v1→
v v1→
x1 v1→
x2 v2→
x3 v3→
x1 v1→
v1→
x1 x1
,v2→
v3→
= = = 2, = = = 1, = = = 4x1∙v1
→v
∙v1→
v1→
42
x2∙v2
→v
∙v2→
v2→
66
x3∙v3
→v
∙v3→
v3→
123
= + +.. .+v x1 v1→
x2 v2→
xnvn→
,..x1 xn vk→
xk
=xk∙vk
→v
∙vk→
vk→
∙ = ∙ ( + +.. .+ ) = ∙vk→
v vk→
x1 v1→
x2 v2→
xnvn→
xk vk→
vk→
k ≠ l : ∙ = 0vk→
vl→
IR3
, .v u v ⊥u u
= ( − t ), ⊥ , ( − t ) ∙ = 0 ⇒ t =v ⊥u v u v ⊥u u v u u ∙v u ∙u u
t + = t + ( − t ) =u v ⊥u u v u v = tv ∥u u v .u
Projektion von v auf u : = ⋅ , = − , = +v ∥u
∙v u ∙u u
u v ⊥u v v ∥u v v ∥u v ⊥u
v ∥
Beispiel:
Probe:
Projektion auf U: Gegeben ein Vektor . Finde den Vektor in der zu den kürzestenAbstand besitzt. Diesen Vektor nennen wir dann Projektionvon auf . Eine solche Projektion können wir durch eine notwendigeund hinreichende (also äqulvalente) Bedingungcharakterisieren, und damit auch berechnen.
ist äquivalent zu
Der Differenzvektor ist also orthogonal zumUnterraum , seine Länge
ist der Abstand von zu . (anschaulich im klar, sieheSkizze, ein kleiner Beweis für den Allgemeinfall dazu unten).
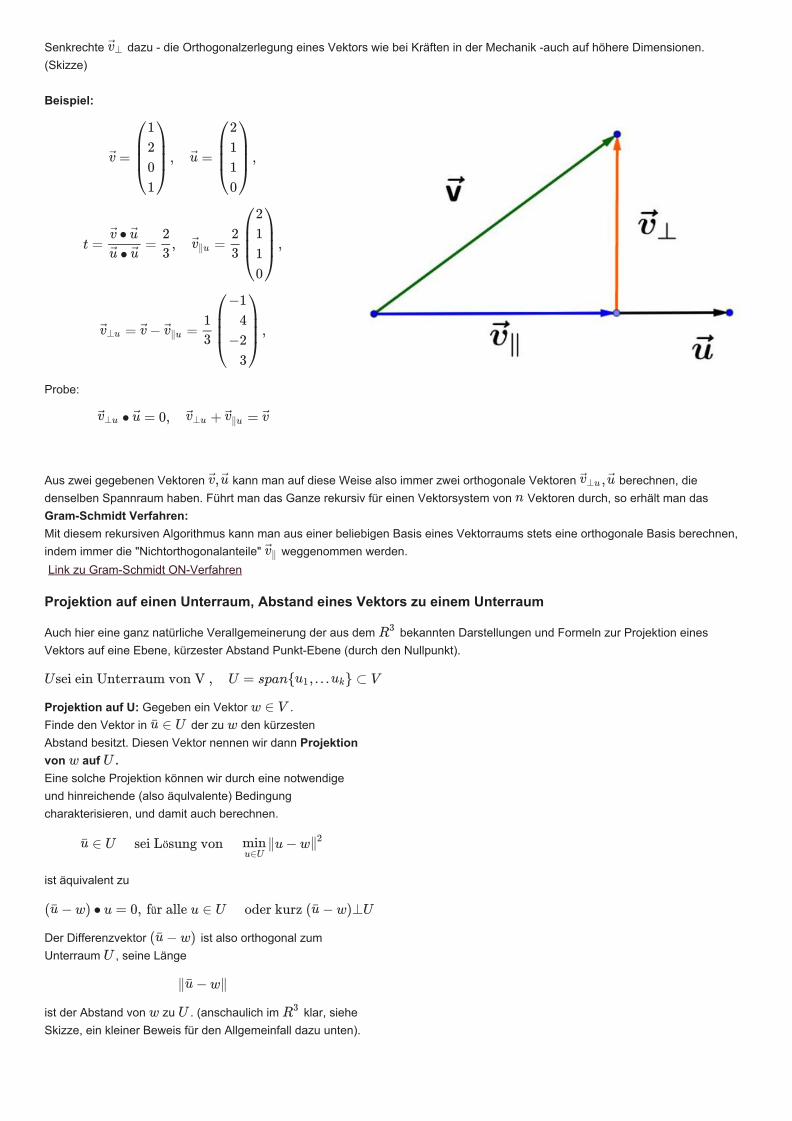
Senkrechte dazu die Orthogonalzerlegung eines Vektors wie bei Kräften in der Mechanik auch auf höhere Dimensionen.(Skizze)
Aus zwei gegebenen Vektoren kann man auf diese Weise also immer zwei orthogonale Vektoren berechnen, diedenselben Spannraum haben. Führt man das Ganze rekursiv für einen Vektorsystem von Vektoren durch, so erhält man das GramSchmidt Verfahren: Mit diesem rekursiven Algorithmus kann man aus einer beliebigen Basis eines Vektorraums stets eine orthogonale Basis berechnen,indem immer die "Nichtorthogonalanteile" weggenommen werden. Link zu GramSchmidt ONVerfahren
Projektion auf einen Unterraum, Abstand eines Vektors zu einem Unterraum
Auch hier eine ganz natürliche Verallgemeinerung der aus dem bekannten Darstellungen und Formeln zur Projektion einesVektors auf eine Ebene, kürzester Abstand PunktEbene (durch den Nullpunkt).
v ⊥
= , = ,v
⎛⎝⎜⎜⎜
1201
⎞⎠⎟⎟⎟ u
⎛⎝⎜⎜⎜
2110
⎞⎠⎟⎟⎟
t = = , = ,∙v u ∙u u
23
v ∥u
23
⎛⎝⎜⎜⎜
2110
⎞⎠⎟⎟⎟
= − = ,v ⊥u v v ∥u
13
⎛⎝⎜⎜⎜
−14
−23
⎞⎠⎟⎟⎟
∙ = 0, + =v ⊥u u v ⊥u v ∥u v
,v u ,v ⊥u u n
v ∥
R3
Usei ein Unterraum von V , U = span{ , . . . } ⊂ Vu1 uk
w ∈ V
∈ Uu w
w U
∈ U sei Lösung von ∥u − wu minu∈U
∥2
( − w) ∙ u = 0, für alle u ∈ U oder kurz ( − w)⊥Uu u
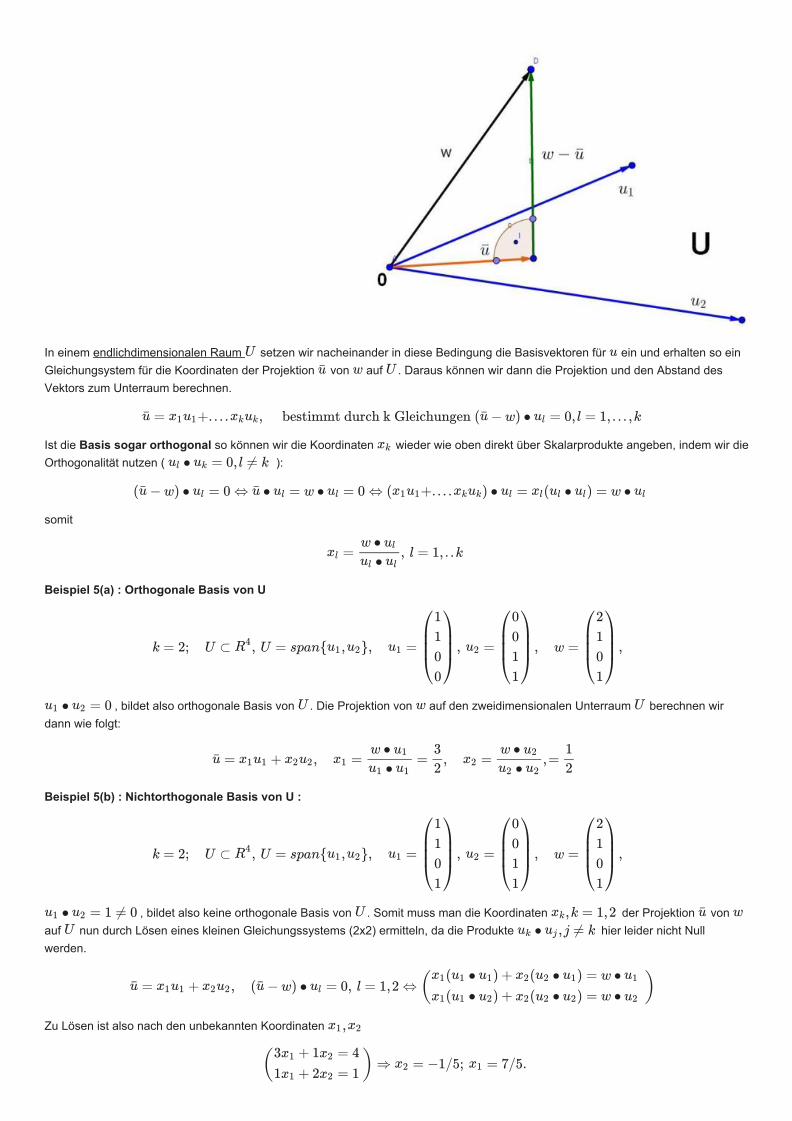
In einem endlichdimensionalen Raum setzen wir nacheinander in diese Bedingung die Basisvektoren für ein und erhalten so einGleichungsystem für die Koordinaten der Projektion von auf . Daraus können wir dann die Projektion und den Abstand desVektors zum Unterraum berechnen.
Ist die Basis sogar orthogonal so können wir die Koordinaten wieder wie oben direkt über Skalarprodukte angeben, indem wir dieOrthogonalität nutzen ( ):
somit
Beispiel 5(a) : Orthogonale Basis von U
, bildet also orthogonale Basis von . Die Projektion von auf den zweidimensionalen Unterraum berechnen wirdann wie folgt:
Beispiel 5(b) : Nichtorthogonale Basis von U :
, bildet also keine orthogonale Basis von . Somit muss man die Koordinaten der Projektion von auf nun durch Lösen eines kleinen Gleichungssystems (2x2) ermitteln, da die Produkte hier leider nicht Nullwerden.
Zu Lösen ist also nach den unbekannten Koordinaten
U u
u w U
= +.. . . , bestimmt durch k Gleichungen ( − w) ∙ = 0, l = 1,. . . ,ku x1u1 xkuk u ul
xk
∙ = 0, l ≠ kul uk
( − w) ∙ = 0 ⇔ ∙ = w ∙ = 0 ⇔ ( +.. . . ) ∙ = ( ∙ ) = w ∙u ul u ul ul x1u1 xkuk ul xl ul ul ul
= , l = 1,. .kxl
w ∙ ul
∙ul ul
k = 2; U ⊂ , U = span{ , }, = , = , w = , R4 u1 u2 u1
⎛⎝⎜⎜⎜
1100
⎞⎠⎟⎟⎟ u2
⎛⎝⎜⎜⎜
0011
⎞⎠⎟⎟⎟
⎛⎝⎜⎜⎜
2101
⎞⎠⎟⎟⎟
∙ = 0u1 u2 U w U
= + , = = , = ,=u x1u1 x2u2 x1w ∙ u1
∙u1 u1
32
x2w ∙ u2
∙u2 u2
12
k = 2; U ⊂ , U = span{ , }, = , = , w = , R4 u1 u2 u1
⎛⎝⎜⎜⎜
1101
⎞⎠⎟⎟⎟ u2
⎛⎝⎜⎜⎜
0011
⎞⎠⎟⎟⎟
⎛⎝⎜⎜⎜
2101
⎞⎠⎟⎟⎟
∙ = 1 ≠ 0u1 u2 U ,k = 1,2xk u w
U ∙ ,j ≠ kuk uj
= + , ( − w) ∙ = 0, l = 1,2 ⇔ ( )u x1u1 x2u2 u ul
( ∙ ) + ( ∙ ) = w ∙x1 u1 u1 x2 u2 u1 u1
( ∙ ) + ( ∙ ) = w ∙x1 u1 u2 x2 u2 u2 u2
,x1 x2
( ) ⇒ = −1/5; = 7/5.3 + 1 = 4x1 x2
1 + 2 = 1x1 x2x2 x1
Beweisskizze zu: Die Orthogonalitätsbedingung oder charakterisiert äquivalent dieProjektion/Minimalabstand von aauf . Notwendigkeit: Es sei eine Minimalstelle, hier also die Projektion von auf , also
Behauptung: Dann gilt die Orthogonalitätsbedingung
Für und definieren wir die reelle Funktion
Aufgrund der Optimalität (*):
Somit für
Grenzübergang lässt den letzten Term verschwinden. Damit gilt erhält man dann die Optimalitätsbedingung
Da ein Untervektoraum ist, gilt diese Ungleichung für jedes und damit gleichzeitig auch für und damit liegtGleichheit vor.
Wir zeigen nun umgekehrt: Die Bedingung für alle ist auch hinreichend für Optimalität: Wir führen dazu einen Widerspruchsbeweis. Widerspruchsannahme: Die Bedingung sei erfüllt, es gebe aber dennoch ein mit
sei also nicht minimal. Wir definieren wie oben im Beweis der notwendigen Bedingung und erhalten durch Ausrechnen des erstenSkalarprodukts und aus der vorausgesetzten Bedingung für alle
Wir setzen nun speziell da Dann ist mit
Den letzten Term können wir weiter abschätzen (beachte: aus der binom. Formel folgt )
Fassen wir die Abschätzungen zusammen so erhalten wir
Nun setzen wir speziell ein und sehen
Dies steht aber im Widerspruch zu , wenn wir dort speziell und wählen. Somit ist unsereWiderspruchsannahme falsch und minimal.
Hinweis (für Mathematikstudenten): In der Optimierungstheorie werden solche Optimalitätsbedingungen für konvexe, stetige
− w⊥U ,u ( − w) ∙ u = 0, u ∈ Uu
w U
u w U
(∗) : ∥ − w ≤ ∥u − w für alle u ∈ Uu ∥2 ∥2
( − w) ∙ h = 0 für alle h ∈ U .u
h ∈ U t ∈ IR,t ≥ 0
f(t,h) = ∥ + th − w = ( + th − w) ∙ ( + th − w)u ∥2 u u
2( − w) ∙ h ≥ 0 und 2( − w) ∙ (−h) ≥ 0 ⇒ 2( − w) ∙ h = 0u u u
( − w) ∙ h = 0,u h ∈ U
( − w) ∙ h = 0,u u ∈ U
∥ − w > ∥u − w , also d = ∥ − w − ∥u − w > 0u ∥2 ∥2 u ∥2 ∥2
u f
2( − w) ∙ h = 0,u t ≥ 0,h ∈ U ,
(∗∗) f(t,h) − f(0,h) = ( + th − w) ∙ ( + th − w) − ( − w) ∙ ( − w) = 2t( − w) ∙ h + ∥h = ∥h ≥ 0u u u u u t2 ∥2 t2 ∥2
h = u − ≠ 0u u ≠ .u w = tw + (1 − t)w
f(t,u − ) = ( + t(u − ) − w) ∙ ( + t(u − ) − w) = (1 − t ∥ − w∥ + ∥u − w + 2t(1 − t)( − w) ∙ (u − w)u u u u u )2 u t2 ∥2 u
2ab ≤ +a2 b2
|2t(1 − t)( − w) ∙ (u − w)| ≤ 2t(1 − t)∥ − w∥ ⋅ ∥u − w∥ ≤ (1 − t ∥ − w + ∥u − wu u )2 u ∥2 t2 ∥2
f(t,u − ) ≤ 2(1 − t ∥ − w + 2 ∥u − w = 2(1 − t f(0,u − ) + 2 f(1,u − )u )2 u ∥2 t2 ∥2 )2 u t2 u
t = 1/2
f(1/2,u − ) − f(0,u − ) ≤ (f(1,u − ) − f(0,u − )) = (∥u − w − ∥ − w ) = − d < 0u u12
u u12
∥2 u ∥2 12
(∗∗) t = 1/2 h = u − u
u
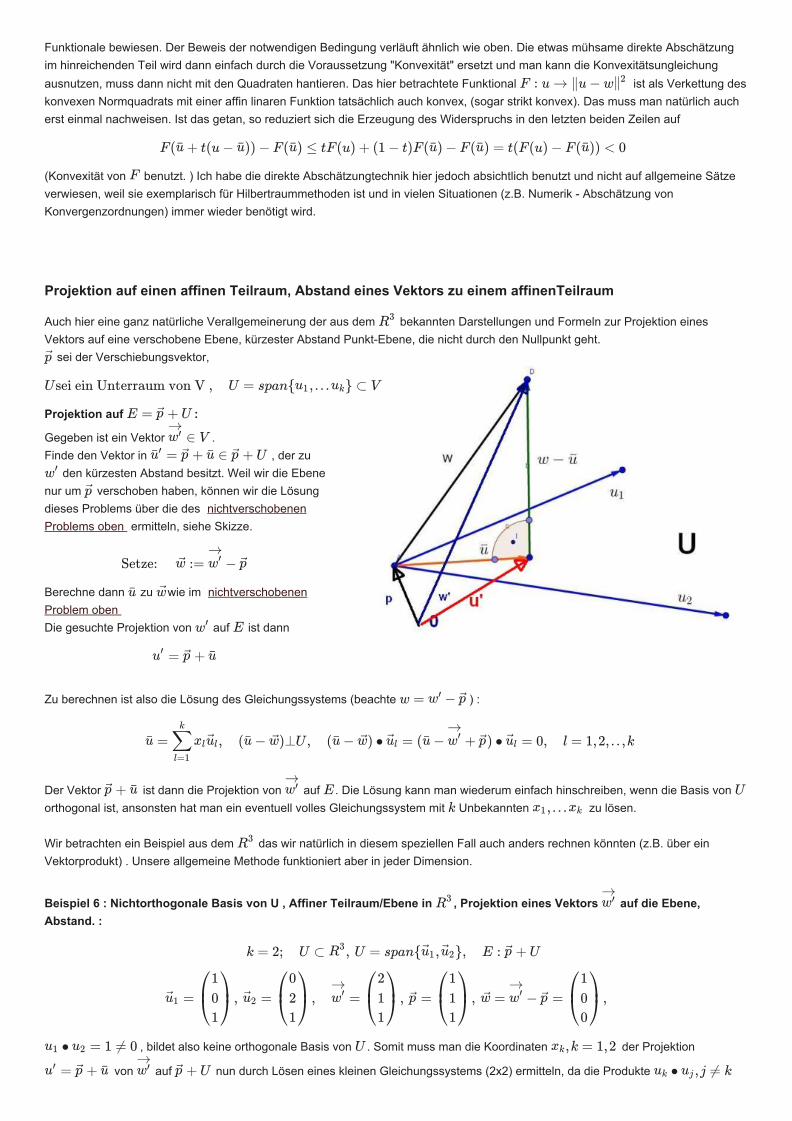
sei der Verschiebungsvektor,
Projektion auf :
Gegeben ist ein Vektor . Finde den Vektor in , der zu
den kürzesten Abstand besitzt. Weil wir die Ebenenur um verschoben haben, können wir die Lösungdieses Problems über die des nichtverschobenenProblems oben ermitteln, siehe Skizze.
Berechne dann zu wie im nichtverschobenenProblem oben Die gesuchte Projektion von auf ist dann
Funktionale bewiesen. Der Beweis der notwendigen Bedingung verläuft ähnlich wie oben. Die etwas mühsame direkte Abschätzungim hinreichenden Teil wird dann einfach durch die Voraussetzung "Konvexität" ersetzt und man kann die Konvexitätsungleichungausnutzen, muss dann nicht mit den Quadraten hantieren. Das hier betrachtete Funktional ist als Verkettung deskonvexen Normquadrats mit einer affin linaren Funktion tatsächlich auch konvex, (sogar strikt konvex). Das muss man natürlich aucherst einmal nachweisen. Ist das getan, so reduziert sich die Erzeugung des Widerspruchs in den letzten beiden Zeilen auf
(Konvexität von benutzt. ) Ich habe die direkte Abschätzungtechnik hier jedoch absichtlich benutzt und nicht auf allgemeine Sätzeverwiesen, weil sie exemplarisch für Hilbertraummethoden ist und in vielen Situationen (z.B. Numerik Abschätzung vonKonvergenzordnungen) immer wieder benötigt wird.
Projektion auf einen affinen Teilraum, Abstand eines Vektors zu einem affinenTeilraum
Auch hier eine ganz natürliche Verallgemeinerung der aus dem bekannten Darstellungen und Formeln zur Projektion einesVektors auf eine verschobene Ebene, kürzester Abstand PunktEbene, die nicht durch den Nullpunkt geht.
Zu berechnen ist also die Lösung des Gleichungssystems (beachte ) :
Der Vektor ist dann die Projektion von auf . Die Lösung kann man wiederum einfach hinschreiben, wenn die Basis von orthogonal ist, ansonsten hat man ein eventuell volles Gleichungssystem mit Unbekannten zu lösen.
Wir betrachten ein Beispiel aus dem das wir natürlich in diesem speziellen Fall auch anders rechnen könnten (z.B. über einVektorprodukt) . Unsere allgemeine Methode funktioniert aber in jeder Dimension.
Beispiel 6 : Nichtorthogonale Basis von U , Affiner Teilraum/Ebene in , Projektion eines Vektors auf die Ebene,Abstand. :
, bildet also keine orthogonale Basis von . Somit muss man die Koordinaten der Projektion
von auf nun durch Lösen eines kleinen Gleichungssystems (2x2) ermitteln, da die Produkte
F : u → ∥u − w∥2
F( + t(u − )) − F( ) ≤ tF(u) + (1 − t)F( ) − F( ) = t(F(u) − F( )) < 0u u u u u u
F
R3
p
Usei ein Unterraum von V , U = span{ , . . . } ⊂ Vu1 uk
Zu Lösen ist also nach den unbekannten Koordinaten
Den Abstand hätten wir in diesem Fall auch über den Normalenvektor berechnen können. ( Das aber nur in der Dimension undwir erhalten so nicht die Projektion, nur den Abstand! )
Aufgaben/Beispiele dazu hier Anwendungen der Projektion zur Parameterschätzung (Regression) hier
Weitere Beispiele für Vektorräume
Die komplexen Zahlen z = x + jy kann man als Vektorraum über dem Skalarkörper sehen. Dieser Vektorraum hat dann dieDimension 2, sichtbar an der Gauß'schen Zahlenebene. Die komplexe Multiplikation spielt hier keine Rolle, es geht nur um dieVektorraumstruktur. Man kann die komplexen Zahlen aber auch als Vektorraum über dem Skalarkörper betrachten, dann haben sie die Dimension 1.Man kann jede komplexe Zahl erzeugen, indem man die skalar mit einer passenden Zahl aus dem Skalarkörper multipliziert.
Dasselbe gilt für komplexe Vektoren (und Matrizen später) man kann sie immer komponentenweise in Real und Imaginärteil (jeweilsreelle Vektoren bzw Matrizen) zerlegen.
Das entspricht ihrer Interpretation als Vektorraum über den reellen Zahlen. Ihre Dimension verdoppelt sich dann (2n) gegenüber derInterpretation als Vektorraum über dem Skalarkörper . Im Grunde genommen handelt es sich verschiedeneVektorräume, da sich die Skalarkörper unterscheiden. Das Skalarprodukt in unterscheidet sich etwas vom dem für reelle Vektoren:
Würde man die Komponenten von darin nicht konjugieren, dann wäre für manche Vektoren das Produkt eventuell negativ odernicht reell. Beides wären für ein Skalarprodukt unerwünschte Eigenschaften.
Anmerkungen zu Koordinatensystemen
In der Physik bemüht man sich, Gesetze koordinatenfrei, also unabhängig von Koordinatensystemen zu formulieren, etwa mit einemuniversalen Ortsvektor in der Mechanik. Der Grund: Je nach Anwendungsfall auf ein konkretes Problem möchte man sich dieFreiheit lassen, ein günstiges Koordinatensystem zu wählen. Günstig bedeutet zum Beispiel: Die Formeln und Rechnungen werdeneinfacher, und man spart sich u.U. auch Koordinatentransformationen. Deswegen ist es wichtig, mit unterschiedlichenBasen/Koordinatensystemen arbeiten zu können. Nicht immer sind orthogonale dabei die besten. In der Kristallographie z.B.verwendet man oft auch schiefwinklige Koordinatensysteme, die an die Struktur der Kristallgitter angepasst sind.
Kleiner Ausblick auf weitere Vektorräume in Anwendungen, die nicht aus Zahlentupeln bestehen.
Das soll Ihnen zeigen, dass die Betrachtung von Vektorräumen jenseits des dreidimensionalen nicht nur "l'art pour l'lart" von ein paar
= + , ( − w) ∙ = 0, l = 1,2 ⇔ ( )u x1u1 x2u2 u ul
( ∙ ) + ( ∙ ) = w ∙x1 u1 u1 x2 u2 u1 u1
( ∙ ) + ( ∙ ) = w ∙x1 u1 u2 x2 u2 u2 u2
,x1 x2
( ) ⇒ = − ; = . = + = ,2 + 1 = 1x1 x2
1 + 5 = 0x1 x2x2
19
x159
u x1u1 x2u219
⎛⎝⎜
5−2
4
⎞⎠⎟
Abstand ∥ − ∥ = ∥ − ∥ =u′ w′→
u w 23
n = 3
= × , ∥ − ∥ = =n u 1 u 2 u w | ∙ ( − )|n w′
→p
∥ ∥n 23
K = IR
C1 C
C = span{1}.
∈ : = + j , , ∈ I Beispiel: ( ) = ( ) + j( )v Cn v u w u w Rn 3 + 7j
1 − 5j
31
7−5
C. (Dim = n)
Cn
∙ = + +.. . . . .v w v∗1w1 v∗
2w2 v∗nwn
v ∙v v
r
spinnerten Mathefreaks ist, sondern dass diese Räume ganz handfeste Anwendungen finden. Ohne solche Vektorräume gäbe es keinHandy, keinen DVD player, keine digitalisierte Musik oder Bilder, kein VoIP. Und auch keine elektronischen Motorsteuerungen undkeine modernen (chipgesteuerten) Haushaltsgeräte.
Reelle oder komplexe ganzrationale Funktionen bilden Vektorräume. Beispiel: Betrachte die Menge aller ganzrationalenreellen Funktionen vom Grad höchstens 2, also Funktionen des Typs:
Diese bilden einen Vektorraum der Dimension 3 über dem Köper der reellen Zahlen. Aus der Schule bekannt: Addiert man solcheFunktionen, so erhält man wieder eine ganzrationale Funktion vom Grad maximal 2, ebenso, wenn man sie mit einer reellen Zahlmultipliziert. Die Abgeschlossenheit ist also erfüllt. Eine Basis ist zum Beispiel
eine andere Basis wäre
Nachweis der linearen Unabhängigkeit über den bereits bekannten Koeffizientenvergleich oder durch Einsetzen einiger Werte undLösen des Gleichungssystems.
n analoger Weise definiert man Räume höherer Dimension usw. Es gibt zahlreiche weitere Polynombasen für diesen Raum, die teilweise für bestimmte Anwendungen relevant sind, zum BeispielInterpolations und Approximationsaufgaben (Lagrangepolynome, Legendrepolynome, Hermitepolynome u.a.) Statt reeller kann man auch komplexe Polynome betrachten, dann allerdings mit dem Skalarkörper .
Auch trigonometrische Funktionen des Typs
(oder allgemein paarweise verschiedene Zahlen) sind linear unabhängig und erzeugen Vektoräume. Für ein passend konstruiertesSkalarprodukt, bei dem allerdings Integration erforderlich ist,
sind diese Funktionen orthogonal, damit auch linear unabhängig. Diese trigonometrischen Basen sind von Bedeutung in nachrichtentechnischen Anwendungen, die sich mit Signalübertragung, darstellung, Digitalisierung analoger Signale befassen. Siehe z.B. auch "schnelle Fouriertransformation", FFT. Ein Signal wird beimSampling digitalisiert dargestellt als Linearkombination dieser Basen.
Schon vor 200 Jahren entdeckte übrigens ein gewisser Jean Baptiste Joseph Fourier, damals Chef einer Militärbehörde unterNapoleon, dass sich mit solchen Funktionen auch Lösungen von Wärmeleitungsproblemen in Reihendarstellung berechnen lassen.Soweit mir bekannt, ging es damals um Probleme mit Kanonen, die sich bei schneller Schussfolge überhitzten. Probleme aus derMilitärtechnik als Impulsgeber wissenschaftlicher Untersuchungen eine leider häufig auftretende Konstante derWissenschaftsgeschichte. Schon der alte Archimedes bastelte gerne effiziente Mordgeräte für die Soldaten seiner Zeit,Wurfmaschinen z.B. Nun Sinusfunktionen zur Berechnung eines Diffusionsprozesses? Das kommt einem zunächst sehr verwegen vor was schwingt dennda außer evtl. Atomen in Festkörpern? aber es funktioniert tatsächlich. Daraus entwickelte sich dann ein fruchtbares Feld derWissenschaft die FourierAnalysis. Fouriers Methode
Auch reelle oder komplexe Matrizen bilden Vektorräume, mit der elementweisen Addition als Vektoraddition und der skalarenMultiplikation elementweise. Mehr dazu im Abschnitt Matrizenrechnung
Für technische Berechnungen, Computergrafik, CAD und vieles andere spielen Vektorräume aus stückweise linearen (oderquadratischen, oder kubischen) Funktionen eine große Rolle, sogenannte Splines. Zum Beispiel in der Methode der Finiten Elemente,dort als sogenannte Ansatzfunktionen, und in anderen Approximations und Interpolationsaufgaben. Sie haben den Vorteil, dass mansie aus einer einzigen Schablonenfunktion ("Hütchen") generieren kann, die man zu passend gewählten Stützstellen verschiebt und
anpasst. Damit sind solche Funktionen sehr schnell mit dem Computer generierbar. Man kann sie in einer oder mehrerenRaumvariablen generieren. Damit lassen sich dann auch räumliche Probleme der Mechanik näherungsweise auf dem Rechner als(große) lineare Gleichungssysteme lösen. Finite Element Methode Ein ähnliches Beispiel für Vektorräume aus Funktionen sind Wavelets, die z.B. in Bildkompressionsverfahren genutzt werden.Wavelets
Hier können Sie sich eine künstlerische Illustration zur Näherung von Flächen mit stückweise linearen Splines in 2 Ortsvariablenansehen. Auch zum selber basteln. Papershapes
Etwas augenzwinkernd könnte man sagen, dass ein Großteil der Ingenieurnumerik darin besteht, sich zu einem Modell einenpassenden endlichdimensionalen Vektorraum (oder eine Folge solcher) zu konstruieren, mit dem man die (oder wengstens eine)Lösung der Modellgleichungen schnell und robust auf einem Rechner approximieren (annähern) kann. In der Regel müssen dabeigroße lineare Gleichungssysteme gelöst werden. Auch nichtlineare Gleichungssysteme werden dabei auf eine Folge linearerzurückgeführt, etwa durch das Newtonverfahren. Daher muss man lineare Gleichungssyteme gut "beherrschen" und ihreEigenschaften kennen. Mehr dazu im nächsten Abschnitt.