Synchronization and chaotization in interacting dynamical systems
II Blekhman "Mekhanobr - Tekhnika" Corporation, 21-st liniya, 8a, 199026 St.Petersburg, Russia
PS Landa Department o f Physics, Lomonosov Moscow State University, 119899 Moscow, Russia
MG Rosenblum* Arbeitsgruppe Nichtlineare Dynamik der Max-Plank-Gesellschaft an der Universitgit Potsdam, Am Neuen Palais 19, PF 601553, D-14415. Potsdam, Germany.
Synchronization of systems executing periodic and chaotic motions, both oscillatory and rota- tory, is considered from the general standpoint in this review article. It is shown that the synchronization phenomenon goes hand in hand with the phenomenon of chaotization. The analogy of synchronization and phase transitions is shown. Several mechanical and physical examples are discussed.
I INTRODUCTION
The discovery of complex chaotic motion in low-dimen- sional dynamical systems as well as the detection of simple regular motions in high-dimensional systems turned out to be one of the more important recent achievements of nonlin- ear mechanics.
In particular, it was established that many interacting dy- namical objects, even those that are loosely linked, may demonstrate a tendency towards mutual synchronization, ie, to some regulation of their behavior. It also holds, if some or all of the objects being isolated are chaotic.
It is essential that both types of dynamical systems behav- ior change from one to another due to variation of parame- ters or in the process of evolution.
Thus, we encounter the old problem of "chaos - order." One of the main but still unsolved tasks for this problem is the determination of general laws for transition from chaos to order and back and an understanding of mechanisms con- trolling such transition.
In this review, which obviously cannot cover the whole problem, we shall describe and discuss the main results on the subject.
2 SHORT HISTORICAL REMARKS
Synchronization of periodic self-oscillations in coupled sys- tems has been known for a long time. Huygens (1673) was
probably the first scientist who observed as early as the 17th century the synchronization phenomenon. He discovered that a couple of pendulum clocks hanging from a light beam had synchronized, ie, the pendulums vibrated with equal fre- quencies and opposite phases. Huygens rightly understood that the synchronization had been caused by imperceptible motion of the beam.
In the middle of the 19th century, in his famous treatise "The Theory of Sound" Rayleigh (1877, 1st edition) de- scribed several interesting phenomena of synchronization in acoustical systems. He discovered that two organ tubes with closely disposed outlets begin to sound in unison, ie, their mutual synchronization takes place. A similar effect was ob- served by Rayleigh for two electrically or mechanically con- nected tuning forks.
At the end of the 19th and the beginning of the 20th cen- turies synchronization phenomena were discovered in some electrical and electrical-mechanical systems, and in lamp generators in particular (van der Pol, 1920).
Rotating bodies are rated in a special class of synchroniz- ing objects. From time immemorial, it has been known that only one side of the Moon is turned towards Earth. This is the evidence of the equality of mean frequencies of rotation of the Moon around its axis and around Earth, ie, synchroni- zaton. Later many similar relations between frequencies of revolution of celestial bodies became known. However, these relations have been considered as some separate phe-
* Permanent address: A. von Humboldt Fellow, Mechanical Engineering Research Institute, Russian Academy of Sciences, 101830 Moscow, Russia.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
734 Blekhman et al: Synchronization and chaotization
nomena of no general importance. The situation changed af- ter the discovery of synchronization of unbalanced rotors in the late 1940s. The theory of this phenomenon created by Blekhman and co-workers and other investigators has al- lowed us to understand that the tendency to synchronization is a general feature of joint operation of material objects, no matter what is the nature of these objects. It was established that the synchronization phenomenon is a manifestation of the tendency toward the self-organization in complex sys- tems. As a result, the general theory of synchronization has made much progress. The main achievements of this theory are presented in books (Blekhman, 1971 ; 1981).
Recently many detailed investigations concerning the synchronization in systems with both regular and chaotic be- havior have appeared. They relate to a great variety of scien- tific areas including physics, biology, and medicine.
3 BASIC N O T I O N S AND D E F I N I T I O N S : F O R M U L A T I O N OF T H E S Y N C H R O N I Z A T I O N P R O B L E M
In a wide sense, synchronization may be defined as the mu- tual time conformity of two or more processes. This confor- mity may be characterized by the appearance of certain rela- tions between some functionals for these processes. In this review, we shall restrict ourselves to a more narrow defini- tion, namely as an appearance due to interaction of a certain conformity of "rhythms" characterizing the motion of dy- namical objects. Nevertheless, this definition remains suffi- ciently broad and many different phenomena satisfy it. 1 Therefore, in this review we will mainly consider synchroni- zation of interacting self-oscillatory and "self-rotatory" sys- tems. 2 In addition, the interesting phenomenon of synchroni- zation of motions of celestial bodies will be described.
We state a mathematical formulation of the synchroniza- tion problem, sufficiently general to cover the majority of particular cases. We will consider synchronization of dyna- mical systems o n l y ) By doing so we omit such an important problem as the influence of fluctuations on the synchroniza- tion processes. This problem is addressed in (Stratonovitch, 1961; Malakhov, 1968; Landa, 1980).
Let us consider k coupled dynamical objects (Fig 1). Let the state of s-th object be determined by the rs-dimensional
vector x " )= [xl'~l,..., --(")~ (s = 1 .... ,k). The components x(s~j ,~; j,
o f the vector x~.") are the phase space coordinates of the ob- ject.
The state of the entire system is determined both by the set o f the vectors xt~) and by the m-dimensional vector u = [u~,. . . , u,,] describing the state of the system connecting the objects. So, the dimension of the phase space of the entire
• ln particular, forced oscillations fall into this definition. The modern definition of the self-oscillatory systems is given in (Landa and Duboshinsky, 1989; Landa and Rosenblum, t993). Similar to the definition of self--oscillatory system we can introduce the notion of a self-rotatory system as a system executing rotatory motion with its velocity of rotation independent of the frequency of the energy source.
3 Dynamical systems are systems whose state is completely described by a certain number of variables called phase coordinates; the values of these coordinates at any time are unambiguously determined by their given initial values.
Appl Mech Rev vol 48, no 11, part 1, November 1995
system equals 1 = rl+... + rk+ m. If the system of coupled objects has at least one stable so-
lution corresponding to the synchronous behavior, then the system will be considered as having the tendency to syn- chronization.
In many cases, the motion of dynamical objects and the coupling system may be described by differential equations. According to Fig 1, the equations are
where X(.,'I=[ X~"' ,...,X~"'], ~.*' = [Fi 's) ..... Frl'~)], U = [U, .....
Urn] are respectively r~- and m-dimensional vector functions. Functions F and U describing the linkage can be called func- tions of coupling. From the diagram in Fig l and Eq (l) , we see that each object may interact with any other object both directly and through the coupling system. Although coordi- nates of the object x." and of the coupling system u are con- tained in Eq ( l ) on equal terms, they have different physical meanings.
The central problem of the synchronization theory is the establishment of existence and stability conditions for solu- tions of Eq (1) corresponding to synchronous motions. We emphasize that for each concrete case the notion of synchro- nous motions requires refinement. This means that the ap- propriate functionals must be chosen, such that the relation between them defines synchronous motion. In particular, for systems with periodic oscillatory or rotatory motions the fundamental frequencies may serve as such functionals. For systems with quasiperiodic oscillations the mean frequencies may be chosen as such functionals. As will be shown below, for systems with chaotic motion the fractal dimensions of the attractor are the appropriate functionals.
In addition to the central problem of synchronization for- mulated above the following problems are of great interest:
1. Calculations of synchronous motions of several types.
2. Determination of the coupling that leads to stable synchronous motion of a given type. This synthesis prob- lem is the reverse of the central one. Sometimes it is interesting to find the regions of initial points in the phase
Fig 1. The set of k dynamical objects described by vectors x(.~'l =
[x(~')l ..... xi'i,.], (s = 1 ..... k) and connected both directly and by linkages determined by the vector u=[ul,...,Um].
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
Appl Mech Rev vol 48, no 11, part 1, November 1995 Blekhman et al: Synchronization and chaotization 735
space, such that the phase trajectory tends to one related to synchronous motion.
Obviously, for practical applications of synchronization effects, it is necessary for the relaxation time of a synchro- nous regime to be sufficiently small, and for the characteris- tics of this regime to be tolerant of different perturbations of the system. Therefore, the evaluation of the relaxation time and the tolerance is important.
Depending on the formulation of the synchronization pro- blem, we shall distinguish between internal (mutual) and ex- ternal synchronization.
In the first and most general case, all synchronized ob- jects occur on equal terms in the unified system; the syn- chronous motion occurs as the result of interaction of all elements of the system.
In the second case, it is supposed that one object is much more powerful than the other ones. Therefore, its motion can be considered as independent on the motion of other objects. It means that the character of synchronous motion is sup- posed to be predetermined.
The particular case of external synchronization is the so- called capture that occurs when a single self-oscillatory sys- tem is synchronized by a given external periodic force.
it should be particularly emphasized that the notion of synchronization suggests the possibility and advisability of separating the unified complex system into discrete subsys- tems characterized by their "own" phase-space coordinates and weakly influencing each other. 4 We note that such a separation of the system into subsystems and coupling sys- tems is arbitrary to some extent. It follows from Eq (I), where all variables x." and u are contained on equal terms.
.Meanwhile, when we consider the synchronization of real systems the question of separation into discrete objects does not usually arise. It follows from the fact that the system considered is naturally separated into discrete loosely cou- pled subsystems (pendulum clocks, electrical generators, neurons and so on).
if we separate the system into objects which strongly in- fluence each other, then such a separation loses its signifi- cance and the system should be considered as the unified one.
For practical purposes, it may be important to determine whether synchronization occurs due to the linkages that are naturally available in the system or requires the introduction of additional linkages. For example, the synchronization of electrical or mechanical generators often arises because of the inner properties of the system, whereas for the achieve- ment of synchronization of laser modes which is applied to generation of super short light pulses, the inner coupling be- tween modes is insufficient and a special nonlinear absorber is used (Hermann and Wilhelmi, 1984).
The above definition of synchronization based on the separation of the system into objects of similar type can be referred to as the physical or engineering definition. There exist more abstract definitions and notions of synchroniza- tion which may be referred to as mathematical (see
(Gurtovnik and Neimark, 1974; Pecora and Carroll, 1990; 1991)).
From the mere definition of synchronization, it follows that the transition of a system to a synchronous regime is the transition from a less ordered to a more ordered motion. Hence, synchronization can be considered as a peculiar phase transition of the first or the second kind. It is known that phase transition may be characterized by some parame- ter of order (or disorder), in the first-order phase transitions, the order parameter changes by a jump, and as a rule hys- teresis occurs. In the second-order phase transitions, the or- der parameter increases continuously. This increase usually follows a power law, and the power exponent is called the critical index. For this transition hysteresis is not observed. The choice of the order parameter is arbitrary to some extent. For example, in the simplest case of synchronization of peri- odic self-oscillatory systems the difference between funda- mental self-oscillation frequencies (the so-called beat fre- quency) may serve as the parameter of disorder. In the case of the synchronization of chaotic self-oscillatory systems, it is convenient to use the difference between fractal dimen- sions as such a parameter.
4 PERIODIC ACTION ON SELF-OSCILLATORY SYSTEMS. SYNCHRONIZATION AND C H A O T I - ZATION. SYNCHRONIZATION T H R E S H O L D
Synchronization of periodic self-oscillations by an external periodic force has been known long. In the early twenties, Appleton (1922) and van der Pol (1920) created the simplest theory of synchronization of electronic generators. 5 In the thirties, there appeared a series of publications by Mandelstam and Papalexi (see Mandelshtam and Papalexi, 1941) in which it was shown that in self-oscillatory systems with a periodic external force, a nonlinear resonance phe- nomena can be observed. These phenomena were called resonances of the n-th order. They consist in the following: If the frequency of the action co is close to the frequency which is n times larger or smaller than the frequency of free self-oscillations coo, where n is an integer, then the synchro- nization (or capture) of the frequency occurs. This means that the frequency of oscillations becomes exactly equal to either co/n or nco. The special case when n = 1 was consid- ered by Appleton and van der Pol.
Recently, there has been some important progress. After the discovery of dynamical chaos, it was found that a suffi- ciently strong external periodic action can result not only in synchronization but also in chaotization of periodic self-os- cillations (a short review of these works is given in Neimark and Landa, 1987). The ideas of synchronization were also widely adopted for chaotic self-oscillatory systems. It was found that a periodic external force may synchronize a cha- otic self-oscillatory system as well as a periodic one. But, in contrast to periodic systems, a non-zero synchronization threshold exists for chaotic ones (Kuznetsov et al, 1985).
5 In radiophysics the term "generator" is traditionally used as the synonym 4 Such objects are said to be loosely coupled, for the term "self-oscillatory system."
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
736 Blekhman et al: Synchronization and chaotization Appl Mech Rev vol 48, no 11, part 1, November 1995
4.1 Harmonically forced van der Pol and van der PoI-Duffing generators. Synchronization as a phase transition
The van der Pol equation was originally derived for the de- scription of oscillations in a lamp generator with an oscilla- tory circuit in the grid loop. The same equation can be ob- tained for the pendulum suspended from a rotating shaft. This classical mechanical self-oscillatory system is known as a Froude pendulum (Landa, 1980; Landa and Rosenblum, 1993). The van der Pol equation is one of the fundamental mathematical models of self-oscillatory systems. Consider this equation with a harmonic external force:
.r - ~(1 - Ot2c2).r + CO02X = COEB cos col. (2)
For g << ¢o0, Ico0 - col " coo, and B << A0, where A o = 2/,,,r~ is the amplitude of free self-oscillations, the solution of Eq (2) has approximately the form x = A cos(cot + ~), where d and ~ are determined by the following truncated equations:
= T~ - ~ - J ~ - @sin ~,
(oB q0 = `6 - -7.7-cosq0, (3)
A = (0002 - co2)/2co .~ coo - co is the tuning frequency. From Eq
(3), we can show that there exists a range of`6, (-`6~ _< A _<
`6.,.) where ~0 = 0, ie, the frequency of oscillations ~ = co + ~0
~b ~b
~N N \ / /]
as
-L a
, / i(
b s
b
c d
as
Fig 2. Dependencies of the beat frequency 0% on the difference of partial frequencies A for a fixed width of the synchronization region A,. determined by the coupling factor, and on the width of the synchronization region A,. for fixed A. For week coupling ¢% varies smoothly (a,b) and for strong coupling it changes by a jump (c,d).
equals the frequency of the external force. This range is
called the synchronization region. The quantities ~ and co can therefore be chosen as appropriate functionals character- izing the synchronization. Eq (3) describes both synchronous and beat regimes. If B is small enough (coB/I.tAo << 1) then the
mean beat frequency ~ equals
/
`62 , (4)
where A,'= coB/2Ao is the semiwidth of the synchronization region. For sufficiently large B, (coB/gAo , 1 )
06 for A_<A,. = for `6 > `6,.' (5)
where
1 - . 1 - ~ a,=coo( V Ao (6)
The dependency of beat frequency o% = 6 on A for fixed 6̀.,.
and on A,. for fixed A obtained from (4) and (5) are shown in Fig2.
We see that the dependency in the cases of small and large external forces differ essentially. This difference re- flects two known mechanisms of synchronization (Andronov et al, 1937; Teodorchik, 1952; Landa and Rosenblum, 1993). If the external force is small enough, the synchroniza- tion appears because of partial locking of the frequency of the system by the frequency of the external force. In this ease the synchronization appears smoothly when the tuning decreases or the magnitude of the force B increases. The ap- pearance of synchronization is associated with the resonance on the torus in the phase space. If the external force is large enough then the synchronization appears because of suppres- sion of self-oscillation of the system by the external force. For this case the synchronization appears by a jump when the tuning decreases or the magnitude of the external force increases. The transition from synchronous motion to beats is related to the bifurcation of the loss of stability of the limit cycle and the appearance of the toms. In actual practice both mechanisms of synchronization take place simultaneously. Depending on conditions, one or the other dominates.
Let us return to expressions (4) and (5). From (4), it fol- lows that close to the boundary of the synchronization region
(A - `6,),,2.
From (5) we see that at the synchronization boundary the
value of ~ changes discontinuously from zero to `6,..
Thus, ~ may be considered as a parameter of disorder,
and the transition to the synchronous regime may be re- garded as a phase transition. In the case of a small external force, it is the transition of the second kind with critical in- dex 1/2. In the case of a large external force, it is the transi-
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
Appl Mech Rev vol 48, no 11, part 1, November 1995
t ion o f the f irst kind. From Eq (6), it fo l lows that the type o f synchronization
considered can take place only for B _< A0/.vf2 . Otherwise the
synchronizat ion o f the other k ind or chaotization can occur. It is interesting that the phenomenon of chaotization was de- tected in the forties by Cartwright and Littlewood (1945), and Levinson (1949) long before the recognition o f the no- tion of dynamical chaos. By using qualitative methods it was shown that Eq (2) with a large parameter ~ can have irregu- lar stationary solutions. Later such solutions were observed by simulation of Eq (2) and the more general equation: 6
It was shown that for ~t ~ coo the chaotization can take place only for y ~ 0 (Ueda and Akamatsu, 1981 ; Dmitriev et al, 1983). If the oscillations of the autonomous generator are close to relaxation oscillations, then chaotization is possible and was observed for y = 0 (Dmitriev and Kislov, 1982; Parker and Chua, 1983; Grasman et al, 1984). This fact agrees with the results of Cartwrght and Littlewood (1945) and Levinson (1949). The existence of chaotic solutions of Eq (2) for ~t/co 0 >> 1 was proven by Guckenheimer (1980) and Levi (1981) by qualitative methods and by techniques of symbolic dynamics.
4.2 Synchronization of self-oscillatory systems with quasiperiodic motion by an external periodic force
Several practically important problems, for example relating to the calculation of Josephson junctions (Landa and Tarankova, 1975; 1976), and of laser gyroscope responses (Kurjatov et al, 1968), lead to the equation
"~ - ltl( l - Ct'X2) "~ + (COO + ~ ' )~ / ) ) 2 x = CO2B c o s col, ( 8 )
wherej ( t ) is a periodic function with a period "~ = 2rUv. This equation differs from (2) by the fact that the frequency coo is
not constant, but varies periodically according to coo = COo +
OJ(t). In the autonomous regime, the self-oscillations in this system are quasiperiodic with two fundamental frequencies v
and COo. These oscillations correspond to a two-dimensional
torus in the phase space. When there is an external excitation but synchronization is absent, the oscillations become qua- siperiodic with three fundamental frequencies. A three-di- mensional torus corresponds to these oscillations.
The distinctive feature of the synchronization in this sys- tem is that there are many regimes, referred to as synchro- nous, for which the two-dimensional tori 7 with fundamental frequencies v and co are available in the phase space, but not the limit cycles. In the n-th synchronous regime, the mean frequency of oscillation of the generator E equals co + nv, (n = 0, _+1, _+2,...). Hence, we can choose ~ and co + nv for synchronization functionals.
For conditions
<< coo, A = Ico - co01 << p , coB/laAo << 1, (9)
6 This equation is called the van der PoI-Duffing equation. 7 Particularly, this two-dimensional torus may be placed on the three-
dimensional one. It corresponds to the resonance on the torus.
Blekhman et al: Synchronization and chaotization
andJ(t) having the form of
737
i for mx_<t_<(m+I /2 )x f i t )= _ for ( m + l / 2 ) T _ < t _ < ( m + l ) x (10)
(m = 0, I, 2...), the synchronization problem can be approxi- mately solved analytically (Landa and Tarankova, 1975; Landa, 1980). The dependence of the mean beat-frequency
=Ico - El on the tuning A is shown in Fig 3. Many
regions of synchronization exist where ~ = nv, (n = 0, _+1,
_+2,...). When the conditions (9) do not necessarily apply andf l t )
= sin vt, Eq (8) was studied numerically. We have consid-
ered two cases: la/co0 = 0.1 and P./co0 = 5. In the first case, the behavior of the system qualitatively corresponds to the ana- lytical solution of Eq (8) with the function.At) having the
form (10). The dependence of the mean beat frequency ~ on
B for n = 1 is shown on Fig 4. Close to the boundary o f the
Y_ la
2
!
O
,4
I t
/ Z . _ &
1)
Fig 3. Qualitative dependence of the average beat frequency on
the tuning for tan...7- < 1.
1.02 -
1.00 _...~----""- /
/
0 .98 . . . . I . . . . I , , i . . . . I . . . . I B 0 : 0 0 0 . 0 5 0 . 1 0 0 . 1 5 0 .20 0 . 2 5
Fig 4. The dependence of the mean beat frequency ~ on B for p_/co 0 =0.1, n = 1. Close to the boundary of the synchronization region determined by the value of amplitude of the external force B = B~ this dependence may be approximated by functionf = v - (B s - B) I/2 for B < B~.. The dependence o f f on B is shown by the dashed line. Hence, we can consider this transition to the synchronous regime as a phase transition of the second kind.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
738 Blekhman et al: Synchronization and chaotization Appl Mech Rev vol 48, no 11, part 1, November 1995
synchronization region determined by the amplitude of the external force B = B,., this dependence may be approximated
by the function ~ ~ v - (B,. - B) I/2. Thus, for the n-th syn-
chronization region the value of ~ - nv may be chosen as a
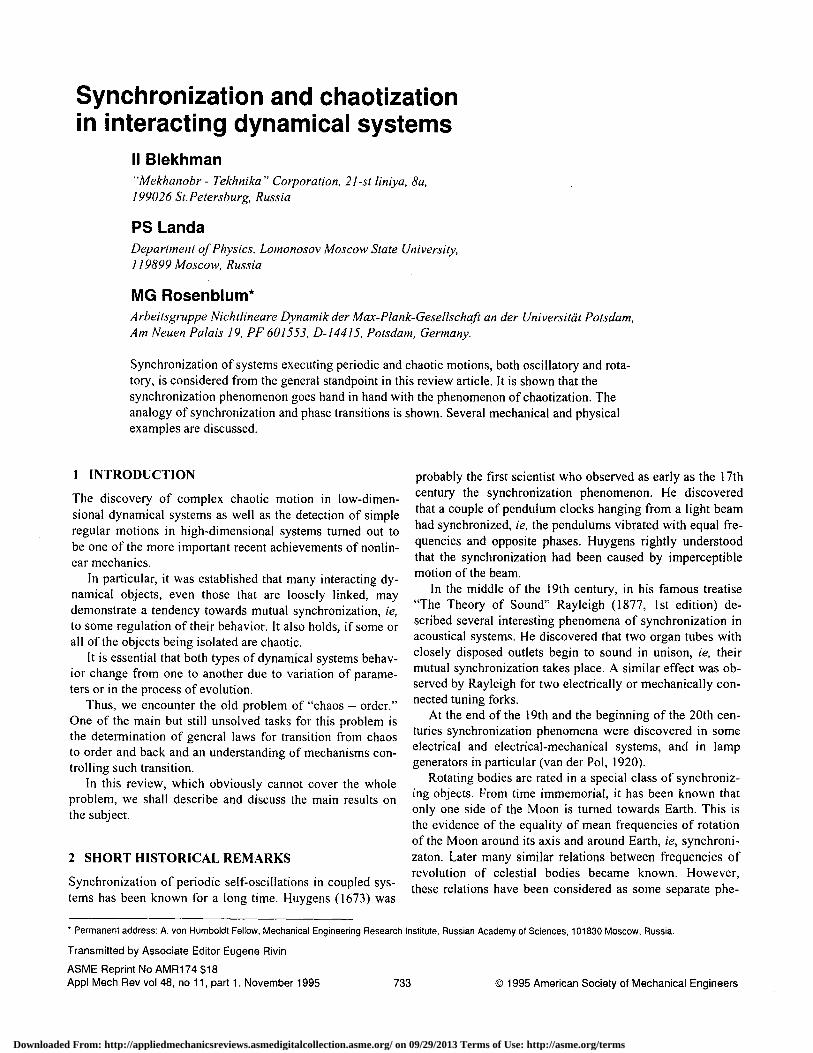
parameter of disorder, and the transition to a synchronous regime corresponds to the phase transition of the second kind with critical index 1/2. In the second case (g/m0 = 5), the transition to a synchronous regime occurs practically by a jump (Fig 5). Therefore, this transition may be viewed as the phase transition of the first kind.
4.3 Harmonically forced, 1½-dof, self-oscillatory systems Here, we consider the results of an external action on one- and-half-degree-of-freedom systems. The behavior of such systems may essentially differ from the behavior of those with one-degree-of-freedom. This difference is associated with the fact that the phase trajectories evolve from the plane into space. Hence, conditions of the Poincare-Bendixon theorem about possible limit-sets on the phase plane do not apply, in the phase space of such systems the limit set may have a complex (fractal) structure. These sets are often called strange attractors, which can be classified as stochastic and chaotic (Neimark and Landa, 1987).
We restrict our consideration to so-called systems with in- ertial nonlinearity and with inertial self-excitation described by differential equations of the third order. The correspond- ing definitions and examples can be found in Landa (1980) and Babitsky and Landa (1982; 1984). These examples in- clude the simple model of a vibromachine, an engine with a regulator of the rotational speed, an electro-mechanical vi- brator, frictional self-oscillations in the presence of a librica- ting layer, thermal convection of fluid, vibration of a tool during metal machining, vibration of a ship in the absence of swell, and other examples related to different fields of sci- ence and technology.
The simplest equations of a periodically driven self-oscil- latory system with inertial nonlinearity are (Landa, 1980)
0.58
0.56
T •
0.54. 0.00
I I I I I I ~ L I i I L * I I t ~ I I ~ I ~ i I
0.05 0.10 0.15 0.20 0.25 ,5'
Fig 5. The dependence of the mean beat frequency ~ on B for p/oo 0 = 5, n = 0. In this case the transition to the synchronous regime occurs practically by a jump. Therefore, this transition may be viewed as a phase transition of the first kind.
Jc" - ( ~ - b y ) ~ + ~o2X = O~o2B c o s oot,
+ yy = e~.x 2 . (11)
Systems of this type were considered for the first time by Meacham (1938) and studied by Theodorchik (1945).
For certain restrictions for the parameters (~, 7 << COo), the synchronization problem for Eq (11) can be approximately solved analytically (Landa, 1980). The synchronization re- gion and the behavior of the solution near this region can be obtained. In contrast to the van der Pol generator, oscilla- tions of the generator with inertial nonlinearity may be of complex form. So, for a certain range of Y, the envelope of beats may have the form of a periodic sequence of short pulses. When y decreases the peak recurrence frequency and the width of the peaks decreases and their height increases. On a further decrease of 7, the periodicity may be broken and chaos may appear. By simulating the truncated equa- tions, the chaotic behavior of amplitude and phase was de- termined for the first time by Kaptsov (1975). Later, the same effect was numerically and experimentally investigated by Anishchenko et a l (1983; 1985) within the framework of the similar model
.~ = g x + y - x z + B sin oot,
= - - X ,
e = ~, ( 9 ( x ) x 2 - z), where 9,(x) is the Heaviside function. It was shown, that as m increases, quasiperiod-doubling bifurcations of the torus emerge, and a chaotic attractor arises. Similar results also hold if the force amplitude B increases. If B is fixed, the number of torus doublings until it is destroyed is finite and determined by B: The smaller B, the larger the number of doubling. 8
Apparently, the chaotization of oscillations of a generator with inertial nonlinearity can also take place during paramet- ric action with a frequency on the order of the frequency of relaxation process. This phenomenon has been studied nu- merically and experimentally in Bezaeva e t a! (1986; 1987).
If ~ > COo then, as previously noted, the oscillations of the autonomous generator may be chaotic. In this case, the ex- ternal force can lead to the transition from chaotic to peri- odic oscillations with a period which is a multiple of that of the force, ie, the synchronization phenomenon can occur. It is essential that the transition arises only from an increase in a certain critical value of the force amplitude. This critical value resonantly depend on the frequency of the force. So, it makes sense to introduce the definition of synchronization threshold as the minimum amplitude of harmonic force for which the synchronization takes place at some frequency. That threshold is strictly zero for periodic self-oscillatory
8 This result corresponds to the general conclusions of Kaneko (1983; 1984) who has shown, for the 2D map
X,+l= 1 - Ax~ +esin2nyn, Y,+I =Y, + C+ e'xn that the number of torus-doubling bifurcations taking place before transi- tion to chaos with the variation of parameter A is finite and determined by the coupling parameter e.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
Appl Mech Rev vol 48, no 11, part 1, November 1995
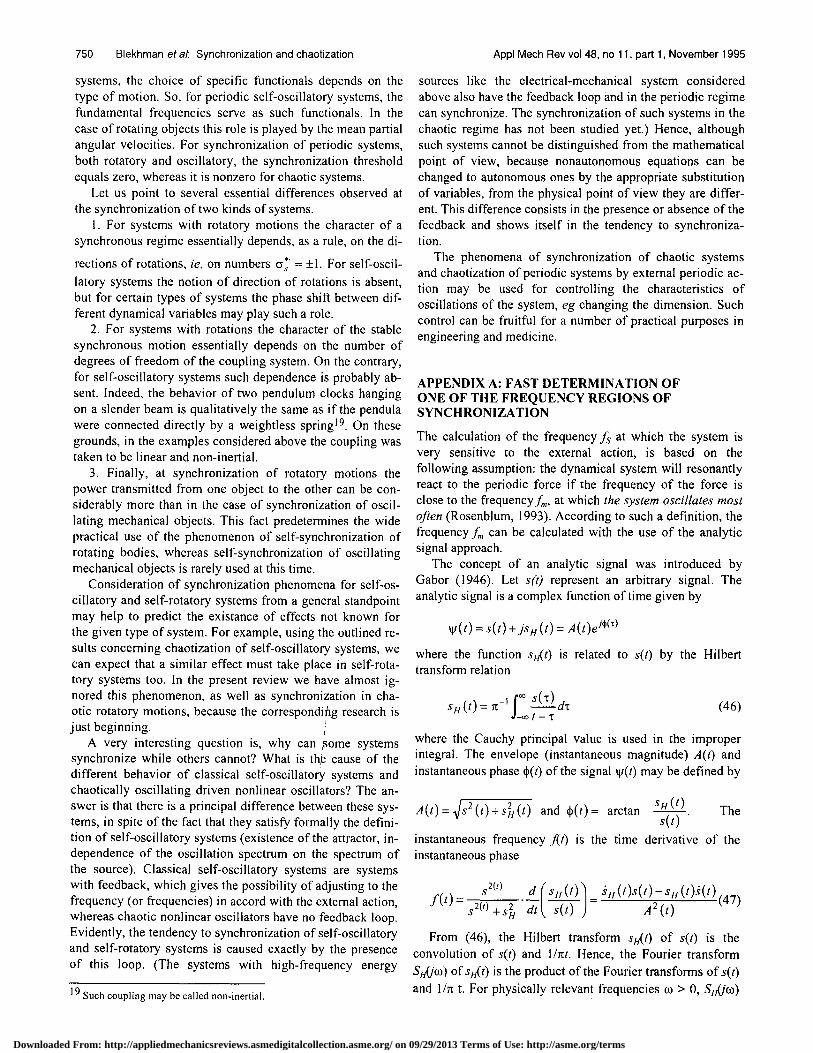
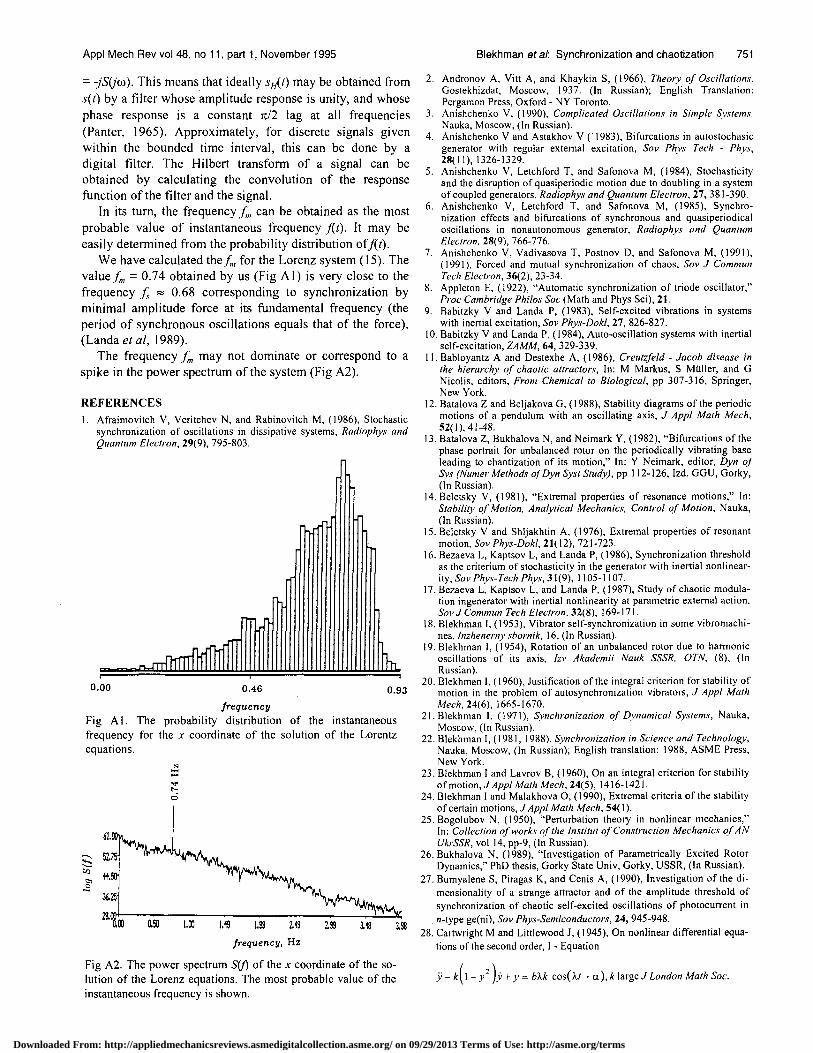
systems (Blekhman, 1981) and it is non-zero for chaotic self- oscillatory systems (Kuznetsov et al, 1985). Therefore, a non-zero threshold can serve as a criterion for chaos in dy- namical systems. Numerical determination of the synchroni- zation regions is complicated by the absence of a technique for the quick detection of the necessary frequency of excita- tion. In the Appendix, a very simple algorithm for the deter- mination of the frequency of an external force synchronizing the chaotic system is proposed. It is essential that this fie- quency may be defined without application q f the svnchro-
nizingJ'orce to the investigated system, but merely from the time series at its output (Rosenblum, 1993).
We note that, as it was pointed out in (Bezaeva et al,
1986) the synchronization threshold is very convenient for an experimental study of chaotic systems because it can be easily measured in a physical experiment.
Effects similar to the ones discussed for system (11) can also be observed in harmonically driven systems with inertial self-excitation described by equations
Numerical investigations of three such systems and of the generator with inertial nonlinearity provided the hypothesis that the threshold of synchronization is related by the power dependency to the positive Lyapunov exponent (Kuznetsov et al, 1985; Neimark and Landa, 1987). For these systems the exponent Z in the formula
B,,,.= CLx (13)
was tbund to be a universal constant, Z ~ 0.33. The investi- gations of more complex systems (Landa and Perminov, 1987; Dyckman et al, 1992) have shown that the Lyapunov exponent in Eq (13) must be replaced by the Kolmogorov entropy and the exponent Z is not a universal one.
Bumyalene et al (1990) established in physical experi- ments that the value of the synchronization threshold is correlated to the attractor dimension.
A detailed study of the synchronization of chaotic oscillations was performed by Landa and Perminov (1985) for system (12) with
. f iX, y ) = - b x 3, q)(x) = - l x 2 - d x 3 (l 4)
and by Landa et al (1989) for the well-known Lorentz sys- tem 9 driven by a harmonic force
22 = ~(x - y)
p = rx - y - xz
= - b z + x y + B cos(2nvt). (15)
The results of computer simulations of these systems have been presented by Neimark and Landa (1987) and Landa and
9 The Lorentz equations were obtained in the study of thermoconvection of fluid. These equations admit a purely mechanical model proposed by Zlochevsky and described in (Neimark and Landa, 1987). The model consists of two solid bodies, a lifting and the lifted axi-symmetric rotors (gyrostat).
B l e k h m a n et al: Synch ron i za t i on and chao t i za t i on 739
Rosenblum (1993).
4.4 Synchronization of a harmonically excited nonlinear oscillator executing chaotic motion by an additional harmonic force
An interesting question is: What will the algorithm described in the Appendix give when applied to a periodically driven nonlinear oscillator?. To answer this question, we considered a periodically driven Duffing oscillator
E +~x22 + x + x 3 = B c o s ~ t (16)
for ct = 0.2, B = 45, ~ = 1.58955. For these values of the pa- rameters, the oscillations are chaotic. Having calculated the probability distribution for the instantaneous frequency of the solution of Eq (16), we found that this system must be sensitive to the force oscillating at the frequency oJ ~ 2.2~. Thus, the behavior of the system
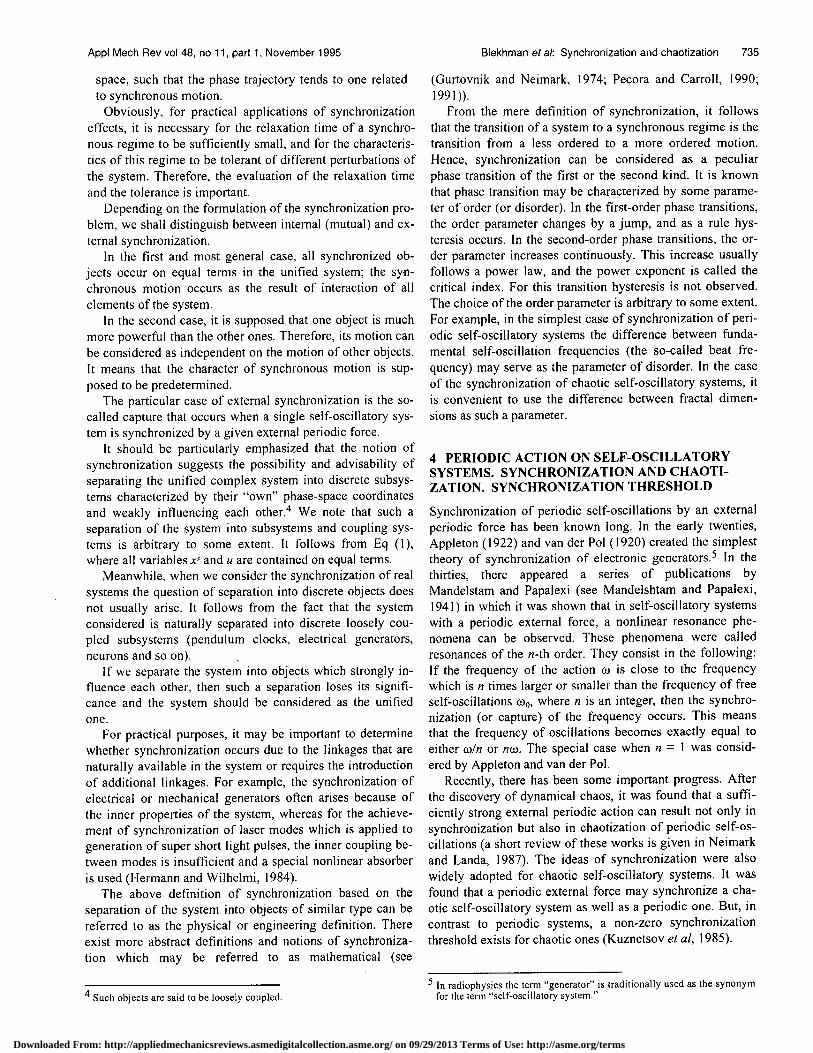
.~ + ~22 -.t- x + x 3 : B cos ~ t + A cos 2.2~t (17)
was studied for different A. For A < 20 the oscillations were chaotic (Fig 6a), but for A = 20 we observed synchroniza- tion: the oscillations became periodic with the major fre- quency o~/11 = ff2/5 (Fig 6b).
In summary, we want to stress that the resonant excitation leads to synchronization and that the non-resonant one leads to chaotization of oscillations of a system. Chaotization may also take place for resonant excitation if it is strong enough.
5 INTERACTING SELF-OSCILLATORY SYSTEMS. THE PROCESSES OF SYNCHRONIZATION AND CHAOTIZATION. FRACTAL DIMENSION AS A QUANTITATIVE C H A R A C T E R I S T I C OF SYN- CHRONIZATION AND C H A O T I Z A T I O N
5.1 Interaction between generators executing periodic motion
As an example, consider the mutual synchronization of two coupled van der Pol generators described by the equations
-rl - kh( 1 - ctlxl2)21 + ~ x l - - clx2,
X2 -- "2( 1 -- 13~2X22)22 -t- (D~X2= C2X 1.
If the generators are not identical, then we always can separate them into a leading generator and a driven generator. So, if ClA2/A] > c2.41/A2, where Ai, 2 a re the amplitudes of self-oscillations of the autonomous generators, then the second generator is the leading one. In the limiting case when clA2/AI >> c2A i/A2 the coupling may be considered as one-directional. This corresponds to an external action on the first generator.
If U~,2, c~,2 and Icol - co21 are sufficiently small, then the synchronization region and the behavior of the solution near this region can be obtained analytically (Landa, 1980). So, in the synchronous regime we can assume that x~ ~ (A~ + aL) cos cot andx 2 = (A 2 + a2) COS (OOt + q~), where al.2 <~ AI.2 are the corrections to amplitudes A1.2, ~ is the phase shift be-
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
740 B lekhman et al: Synchronizat ion and chaot izat ion
tween oscillations of both generators, and co is the frequency of synchronous oscillations. It can be shown that the phase of oscillations of the driven generator is behind the phase of oscillations of the leading generator; and the correction a is positive for a driven generator and negative for a leading one. We note that the two mechanisms of synchronization mentioned earlier manifest themselves in the case of mutual synchronization as well.
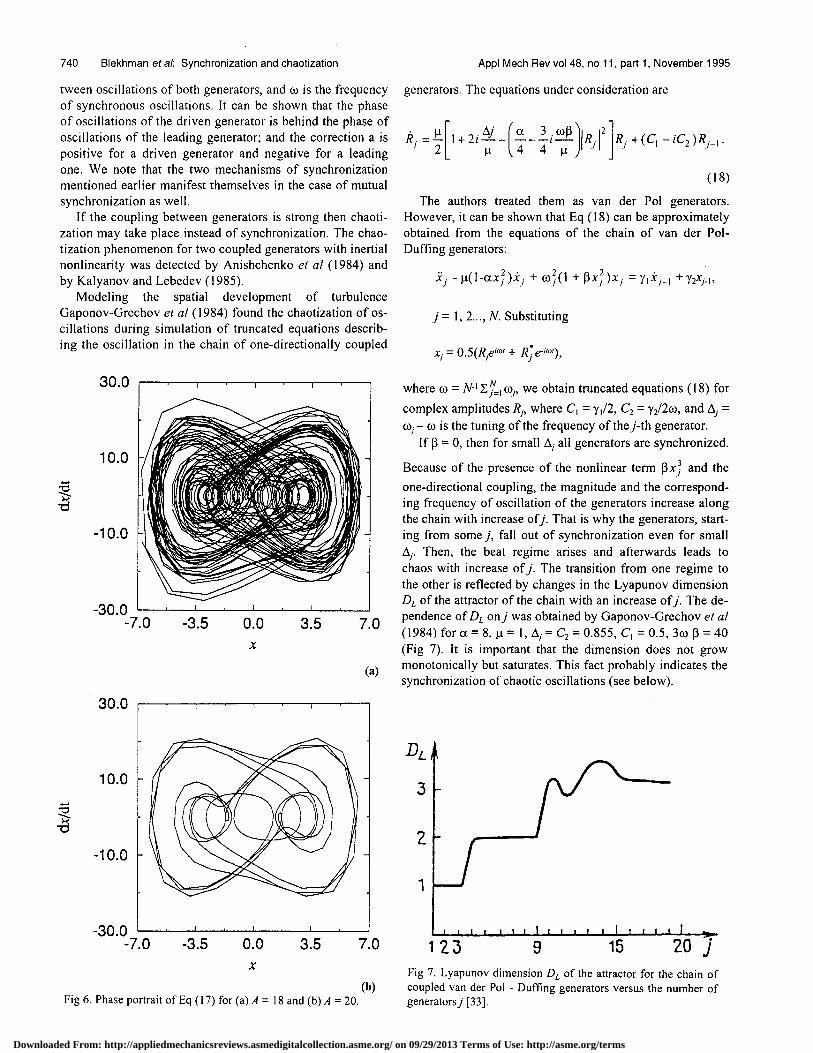
If the coupling between generators is strong then chaoti- zation may take place instead of synchronization. The chao- tization phenomenon for two coupled generators with inertial nonlinearity was detected by Anishchenko et al (1984) and by Kalyanov and Lebedev (1985).
Modeling the spatial development of turbulence Gaponov-Grechov et al (1984) found the chaotization of os- cillations during simulation of truncated equations describ- ing the oscillation in the chain of one-directionally coupled
3 0 . 0
10.0
-10.0
-30.0 -7.0
] I I
-3 .5 0 .0 3 . 5 7 . 0
x
(a)
30.0 I i I
Appl Mech Rev vol 48, no 11, part 1, November 1995
generators. The equations under consideration are
• la ~ - ~ "~-)1 Jl R~ + ( C I - iC2 )R i_ ,.
(18)
The authors treated them as van der Pol generators. However, it can be shown that Eq (18) can be approximately obtained from the equations of the chain of van der Pol- Duffing generators:
where co = N -I Z~v=, o~/, we obtain truncated equations (18) for
complex amplitudes Rj, where Ci = Ti/2, C2 = y2/2co, and Aj = co.,,- co is the tuning of the frequency ofthej- th generator.
If 13 = 0, then for small AJ all generators are synchronized.
Because of the presence of the nonlinear term 13x~ and the
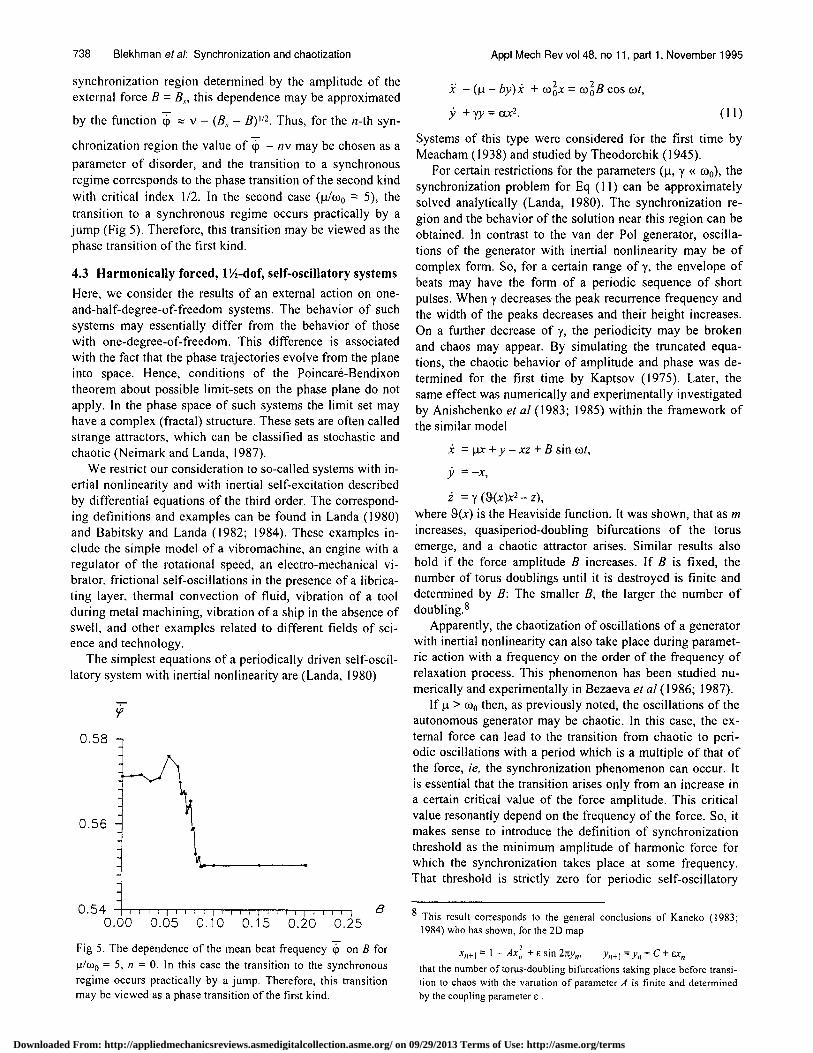
one-directional coupling, the magnitude and the correspond- ing frequency of oscillation of the generators increase along the chain with increase ofj . That is why the generators, start- ing from some j, fall out of synchronization even for small A/" Then, the beat regime arises and afterwards leads to chaos with increase of j . The transition from one regime to the other is reflected by changes in the Lyapunov dimension D L of the attractor of the chain with an increase ofj . The de- pendence o fDt onj was obtained by Gaponov-Grechov et al (1984) for ot = 8, !a = 1, Ai = C2 = 0.855, C I = 0.5, 303 13 = 40 (Fig 7). It is important that the dimension does not grow monotonically but saturates. This fact probably indicates the synchronization of chaotic oscillations (see below).
(b ) Fig 6. Phase portrait of Eq (17) for (a) A = 18 and (b) A = 20.
.L~ L
3
2.
1J ! I I ' J t l I I I i W I l ~ ' ' , I
2 3 9 15 2 0 j
Fig 7. Lyapunov dimension D L of the attractor for the chain of coupled van der Pol - Duffing generators versus the number of generatorsj [33].
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
Appl Mech Rev vol 48, no 11, part 1, November 1995
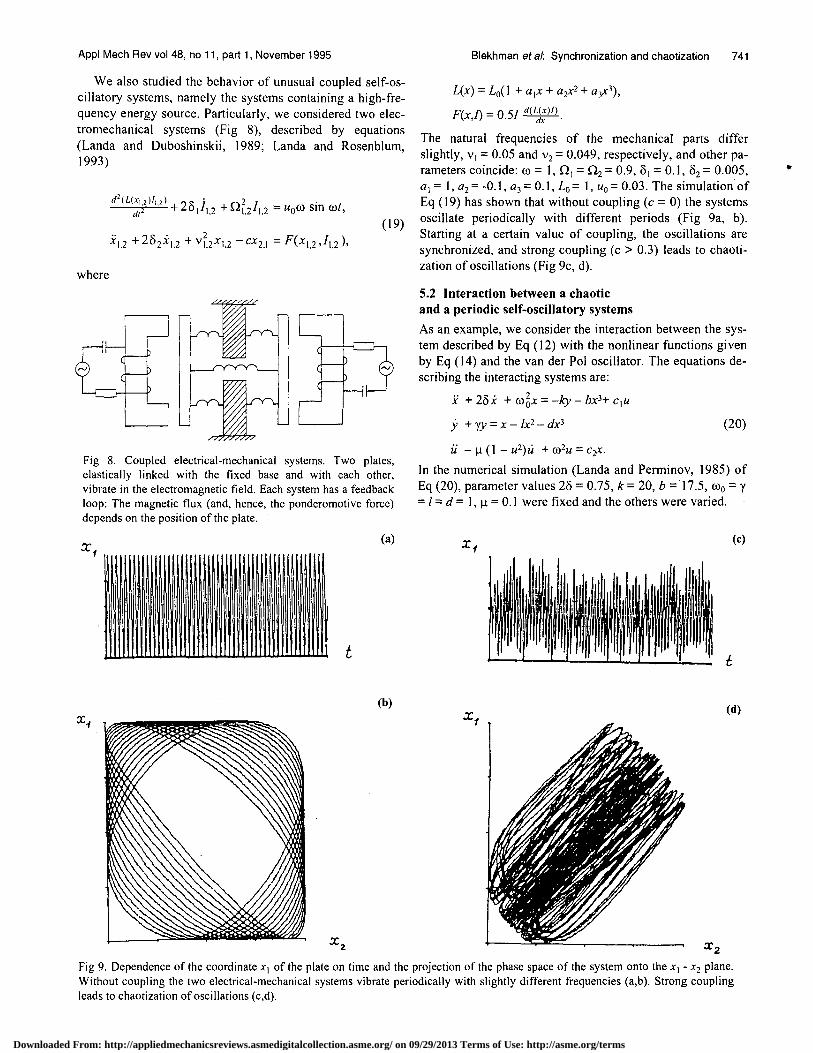
We also studied the behavior of unusual coupled self-os- cillatory systems, namely the systems containing a high-fre- quency energy source. Particularly, we considered two elec- tromechanical systems (Fig 8), described by equations (Landa and Duboshinskii, 1989; Landa and Rosenblum, 1993)
d 2 ( L(x l .2 )ll ,2 ) + 2511t 2 + f~2112 = UoCO sin cot, dt 2 , , ,
Fig 8. Coupled electrical-mechanical systems. Two plates, elastically linked with the fixed base and with each other, vibrate in the electromagnetic field. Each system has a feedback loop: The magnetic flux (and, hence, the ponderomotive force) depends on the position of the plate.
Blekhman et al: Synchronization and chaotization 741
L ( x ) = L0(l + a j x + a2x2+ a3x3),
F ( x , l ) = 0.5• ~/(C(~)/) dx
The natural frequencies o f the mechanical parts differ slightly, vi = 0.05 and v 2 = 0.049, respectively, and other pa- rameters coincide: oo = 1, f~l = f22 = 0.9, 51 = 0.1, 62 = 0.005, a I = 1, a2= -0.1, a3= 0. l, L0= 1, u0= 0.03. The simulation o f Eq (19) has shown that without coupling (c = 0) the systems oscillate periodically with different periods (Fig 9a, b). Starting at a certain value o f coupling, the oscillations are synchronized, and strong coupling (c > 0.3) leads to chaoti- zation o f oscillations (Fig 9c, d).
5.2 Interaction between a chaotic and a periodic self-oscillatory systems
As an example, we consider the interaction between the sys- tem described by Eq (12) with the nonlinear functions given by Eq (14) and the van der Pol oscillator. The equations de- scribing the interacting systems are:
Y + 25./" + coax = -ky - bx3+ ClU
.~ + y y = x - lx 2 - d x 3 (20)
u" - ~ (1 - u 2 ) / J + o ) 2 u = c 2 x .
In the numerical simulation (Landa and Perminov, 1985) o f Eq (20), parameter values 28 = 0.75, k = 20, b = 17.5, COo = y = 1 = d = l, ~ = O.l were fixed and the others were varied.
(a) X f " ~ . . . . . . . . . . . . . . . . ° , ° , , , ° , , ~ o ° J , J b l ~ J I JJ J I s J l a ~ m * t i l l
(c)
(b) gC~ 3Of
3C z ~ 2
(d)
Fig 9. Dependence of the coordinate x I of the plate on time and the projection of the phase space of the system onto the xj - x 2 plane. Without coupling the two electrical-mechanical systems vibrate periodically with slightly different frequencies (a,b). Strong coupling leads to chaotizati0n of oscillations (c,d).
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
742 Blekhman et al: Synchronization and chaotization
The case c 2 = 0 is equivalent to the action of periodic ex- ternal force with magnitude B on the system (12). The mag- nitude B is determined by c~. in particular, c~ = 1 corre- sponds to B = 2. We fixed cl = I, co = rt , and followed the behavior of the system for increasing c 2.
For c a < c,,r = 1.2, the solution of Eq (20) has a period T= 4, twice as large as that of oscillations of the autonomous van der Pol oscillator. This means that the chaotic oscilla- tions of the first system are synchronized by periodic oscilla- tions of the van der Pol oscillator. For c 2 = cn, r, synchroniza- tion is broken, and beats, ie, quasi-periodic oscillations, arise. Their domain of existence is a small part of the range of the parameter c 2. As c 2 increases further, the first system begins to oscillate chaotically and, in its turn, to impose their frequencies on the van der Pol oscillator and thereby to force it to oscillate chaotically too. The power spectra o f both sys- tems and the cross correlation function for c2 = 3 are given in Fig 10. We note that the maximum of the correlation func- tion is located at r = 0. As c 2 increases more, the width and locations o f the peaks in the spectra o f both systems ap-
0 0.1 0.2 0.3 0.4 0.5 0,6 f
0
0.5
-0.~
SU ( ~
(a)
0.1 0.2 0.5 0.,4 0.5 0.6 f
(b)
1. Bzu (r)
^ ^ A A A A ^ A . . . . ^ v v V'V V v vvzv, -
(c) Fig 10. Power spectra of the oscillations of two coupled generators: (a) a generator with an inertial excitation and (b) a van der Pol generator, and (c) their cross-correlation function.
Appl Mech Rev vol 48, no 11, part 1, November 1995
proach each other, whereas the maximum of the cross corre- lation function increases.
I f the frequency of the autonomous van tier Pol oscillator is located outside of the synchronization regions of the first generator for c 2 = 0, then the chaotization of the van der Pol oscillator occurs even for small c 2. When c 2 increases fur- ther, the width of the spectrum of the van der Pol oscillator increases to the width of the spectrum of the autonomous chaotic generator, ie, the synchronization of periodic oscilla- tions of the van der Pol oscillator by chaotic oscillations of the first system occurs.
5.3 Interaction between two chaotic systems
The interaction between two chaotic self-oscillatory systems, identical or different, was studied by Landa and Perrninov (1985). As an example, consider the two identical systems, described by equations
where28=O.75, k=20, b= 17.5, m = 7 = a = l = d = I. i f there is no coupling (C = 0) and the initial condit ions for both systems differ, then the oscillations o f the systems are not correlated. When the coupling factor C increases, the os- cillations of both systems become more and more correlated, ie. synchronization arises.
Similar results have been obtained for two different cha- otic systems described by equations
3 ~
0.5 I f
(a)
1 I _ _
o 0.5 ~ ~"
(b) Fig 11. The power spectra of oscillations of partial systems described by (21). (a) Without coupling the spectra are different in width and location of peaks. (b) As C increases, the spectra become similar in width and the peaks become close in frequency.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
Appl Mech Rev vol 48, no 11, part 1, November 1995 Blekhman et al: Synchronization and chaotization 743
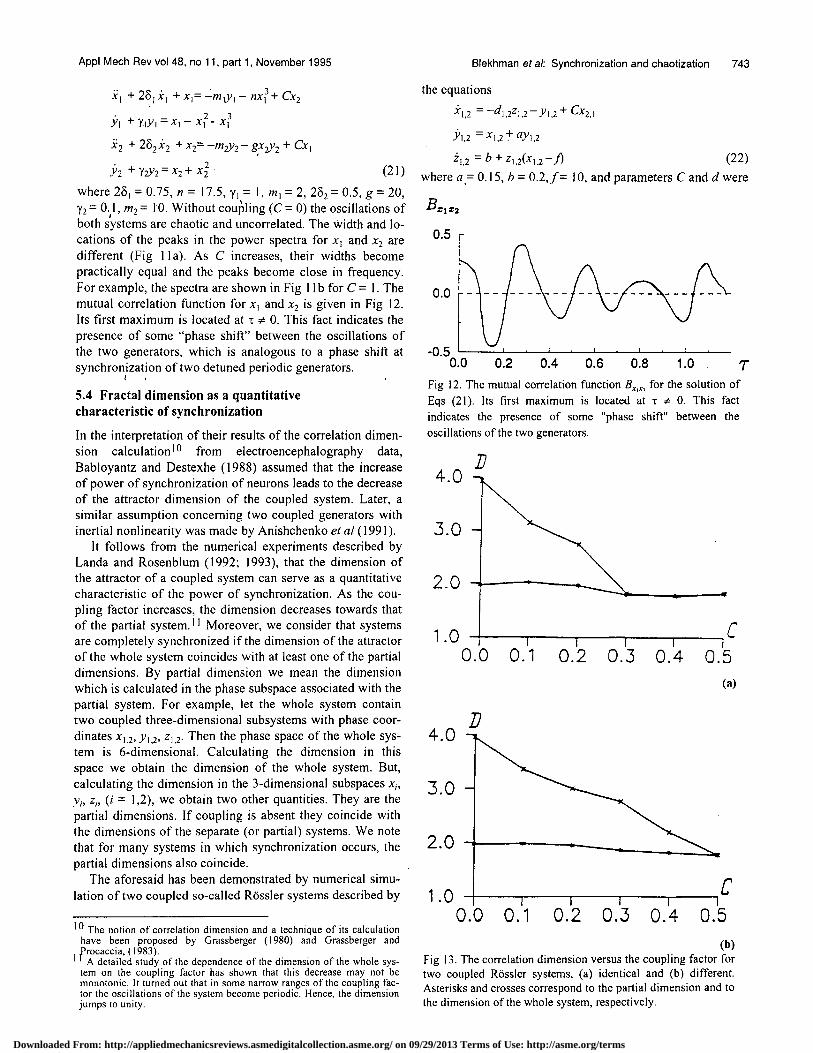
£1 + 28121 + x l = - 2 m t y l - nxl 3 + Cx2
S"I + YIYl = Xl - x t - x ?
-~2 + 28222 + x2= -m2y2 - g x y 2 + Cxl
Y2 + Yzv2 = x2 + x22' (21)
where 28] = 0.75, n = 17.5, 7t = 1, m I = 2, 282= 0.5, g = 20, ~2 = 0'91, m2 = 10. Without COUl~ling (C = 0) the oscillations o f both systems are chaotic and uncorrelated. The Width and lo- cations o f the peaks in the power spectra for x z and x2 are different (Fig l la). As C increases, their widths become practically' equal and the peaks become close in frequency. For example, the spectra are shown in Fig 1 lb for C = 1. The mutual correlation function for x t and x 2 is given in Fig 12. Its first maximum is located at ~ ~ 0. This fact indicates the presence o f some "phase shift" between the oscillations o f the two generators, which is analogous to a phase shift at synchronization o f two detuned periodic generators.
i
5.4 Fractal dimension as a quantitative characteristic of synchronization
In the interpretation o f their results of the correlation dimen- sion calculationl° from electroencephalography data, Babloyantz and Destexhe (1988) assumed that the increase o f power o f synchronization o f neurons leads to the decrease o f the attractor dimension of the coupled system. Later, a similar assumption concerning two coupled generators with inertial nonlinearity was made by Anishchenko et al (1991).
It follows from the numerical experiments described by Landa and Rosenblum (1992; 1993 ), that the dimension of the attractor of a coupled system can serve as a quantitative characteristic of the power of synchronization. As the cou- pling factor increases, the dimension decreases towards that o f the partial system.I 1 Moreover, we consider that systems are completely synchronized if the dimension of the attractor o f the whole system coincides with at least one o f the partial dimensions. By partial dimension we mean the dimension which is calculated in the phase subspace associated with the partial system. For example, let the whole system contain two coupled three-dimensional subsystems with phase coor- dinates x~,2, Y~,2, z~.2. Then the phase space of the whole sys- tem is 6-dimensional. Calculating the dimension in this space we obtain the dimension of the whole system. But, calculating the dimension in the 3-dimensional subspaces xi, yi, z~, (i = 1,2), we obtain two other quantities. They are the partial dimensions. If coupling is absent they coincide with the dimensions o f the separate (or partial) systems. We note that for many systems in which synchronization occurs, the partial dimensions also coincide.
The aforesaid has been demonstrated by numerical simu- lation o f two coupled so-called R6sster systems described by
10 The notion of correlation dimension and a technique of its calculation have been proposed by Grassberger (1980) and Grassberger and tProcaccia, (1983).
1 "A detailed study of the dependence of the dimension of the whole sys- tem on the coupling factor has shown that this decrease may not be monotonic. It turned out that in some narrow ranges of the coupling fac- tor the oscillations of the system become periodic. Hence, the dimension jumps to unity.
the equations
2t.2 = -dl.2zl.2 - Y,.2 + Cx2.]
.Yl.2 = xt,2 .+ aY1,2
zI,2 = b + zt,z(xT.2 - f i (22)
where a = O. 15, b = 0.2,.f= 1 O, and parameters C and d were
Fig 12. The mutual correlation function Bx,x: for the solution of Eqs (21). Its first maximum is located at T ¢ 0. This fact indicates the presence of some "phase shift" between the oscillations of the two generators.
4-.0
,.3.0
2 .0
g 1 . 0 I l I t 1
0.0 0.1 0 .2 0.3 0 .4 0.5 (a)
D 4 . 0 -
2 .0
C 1.0 l J l i
0 .0 0.1 0 .2 0.3 0 .4 0.5
(b) Fig 13. The correlation dimension versus the coupling factor for two coupled R6ssler systems, (a) identical and (b) different. Asterisks and crosses correspond to the partial dimension and to the dimension of the whole system, respectively.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
744 Blekhman et al: Synchronization and chaotization
varied. For d~ = d 2 = d the systems are identical and their partial dimensions are equal. In this case the dependencies of the correlation dimension D of the whole system and partial dimension Dp on the coupling factor C are given in Fig 13a for d = 1. We see that the dimension of the whole system be- comes equal to the partial dimension from a certain critical value of the coupling factor onwards. Like the synchroniza- tion of chaotic systems by an external force, the mutual syn- chronization of chaotic systems is also of a threshold charac- ter, in contrast to synchronization of periodic ones.
If the parameters of partial systems are slightly different the synchronization can also take place, but for a stronger
5P 4
.
C 1 i I ~ 1 ' 1 ' ' l z I ~ I ¢ ' I
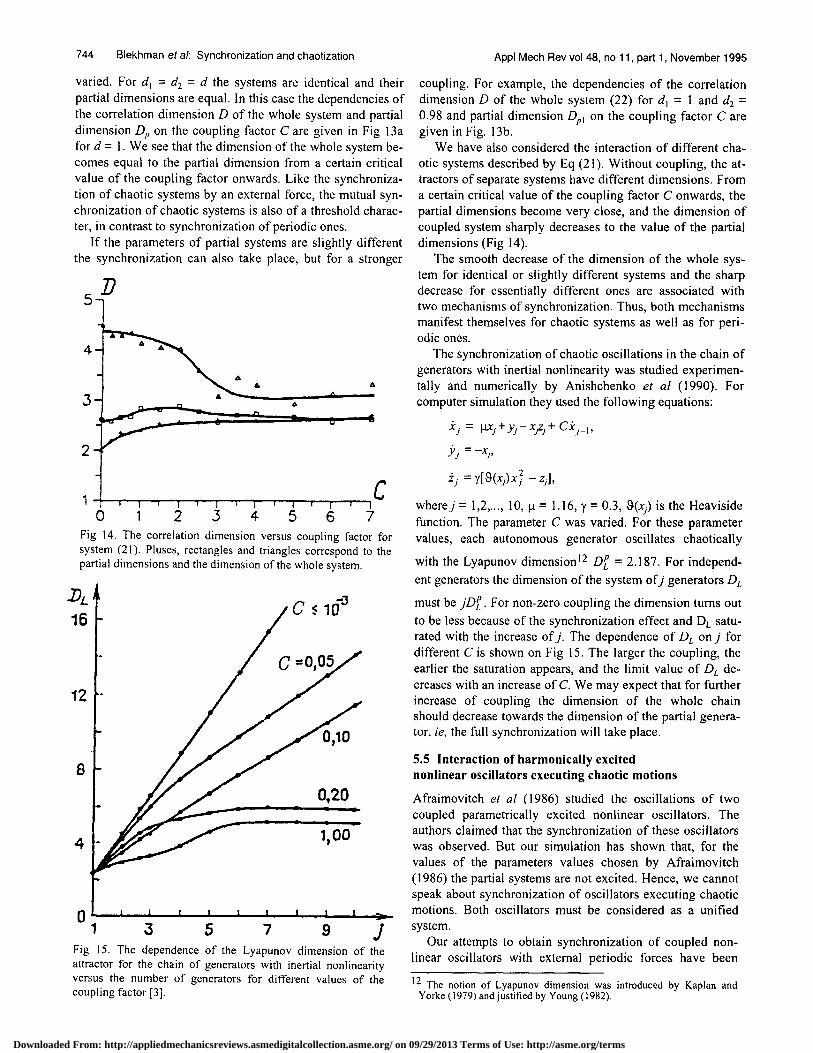
0 1 2 ,3 4. 5 6 7 Fig ]4. The correlation dimension versus coupling factor for system (21). Pluses, rectangles and triangles correspond to the partial dimensions and the dimension of the whole system.
16
12
8
4.
0 L 1
C., i t [
C =0,0~
10
0,20
1,00
z 5 7 s j Fig 15. The dependence of the Lyapunov dimension of the attractor for the chain of generators with inertial nonlinearity versus the number of generators for different values of the coupling factor [3].
Appl Mech Rev vol 48, no 11, part 1, November 1995
coupling. For example, the dependencies of the correlation dimension D of the whole system (22) for dj = 1 and d2 = 0.98 and partial dimension Dp~ on the coupling factor C are given in Fig. 13b.
We have also considered the interaction of different cha- otic systems described by Eq (21). Without coupling, the at- tractors of separate systems have different dimensions. From a certain critical value of the coupling factor C onwards, the partial dimensions become very close, and the dimension of coupled system sharply decreases to the value of the partial dimensions (Fig 14).
The smooth decrease of the dimension of the whole sys- tem for identical or slightly different systems and the sharp decrease for essentially different ones are associated with two mechanisms of synchronization. Thus, both mechanisms manifest themselves for chaotic systems as well as for peri- odic ones.
The synchronization of chaotic oscillations in the chain of generators with inertial nonlinearity was studied experimen- tally and numerically by Anishchenko et a! (1990). For computer simulation they used the following equations:
Xj = I.tXj+ y j - -XjZj+ C.~j_i,
pj =-xj,
ej = ~,[~(xj)=~ - zj],
wherej = 1,2,..., 10, p = 1.16, 7 = 0.3, 9(x j ) is the Heaviside function. The parameter C was varied. For these parameter values, each autonomous generator oscillates chaotically
with the Lyapunov dimension 12 D~ = 2.187. For independ-
ent generators the dimension of the system o f j generators D L
must be ' p j D L . For non-zero coupling the dimension turns out
to be less because of the synchronization effect and D L satu- rated with the increase o f j . The dependence of D L on j for different C is shown on Fig 15. The larger the coupling, the earlier the saturation appears, and the limit value of D L de- creases with an increase of C. We may expect that for further increase of coupling the dimension of the whole chain should decrease towards the dimension of the partial genera- tor, ie, the full synchronization will take place.
5.5 Interaction of harmonically excited nonlinear oscillators executing chaotic motions
Afraimovitch et al (1986) studied the oscillations of two coupled parametrically excited nonlinear oscillators. The authors claimed that the synchronization of these oscillators was observed. But our simulation has shown that, for the values of the parameters values chosen by Afraimovitch (1986) the partial systems are not excited. Hence, we cannot speak about synchronization of oscillators executing chaotic motions. Both oscillators must be considered as a unified system.
Our attempts to obtain synchronization of coupled non- linear oscillators with external periodic forces have been
12 The notion of Lyapunov dimension was introduced by Kaplan and Yorke (1979) and justified by Young (1982).
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
Appl Mech Rev vol 48, no 11, part 1, November 1995
failures. As an example we considered two driven coupled Duffing oscillators described by equations
Y + ~ + ~ 2 x + x 3 = B c o s c o t + C ~
y + ~)) + ~)2y +y3 = B sin cot + CYc, (23)
where c~ = 0.2, B = 50, o~ = 1.58955, f2 = 1. For these values o f the parameters the oscillations are chaotic. The dependen- cies o f dimensions D and Dp on the coupling factor C are given in Fig 16 and show that there is no tendency to syn- chronization. The dimension o f the whole system is less than the sum of the partial dimensions, even for C = 0, because these osci l la~ons have one common coordinate t.
4.0
3.0
2.0
1.0 i I i C
I
-0 .25 0.00 0.25
Fig 16. The partial dimension and the dimension of the whole system for coupled harmonically driven Duffing oscillators versus the coupling factor. The values of the dimensions do not practically depend on the coupling factor. This fact indicates the absence of synchronization.
V / / / I / Z
Fig 17. A general scheme of a system with mechanical vibroexciters. The exciters are placed on bodies B1,...,B,,. They can be both active self-rotatory, ie, unbalanced rotors 1 or crank-rod mechanisms 4 driven by asynchronous motors, and passive, ie, rollers 2 inserted into sleeves or rings 3 on fixed axes.
Blekhman et al: Synchronization and chaotization 745
6 S Y N C H R O N I Z A T I O N O F R O T A T O R Y M O T I O N S . I N T E G R A L C R I T E R I A O F S T A B I L I T Y O F S Y N C H R O N O U S M O T I O N S
6.1 Discovery and applications of the phenomenon of self-synchronization for mechanical vibroexciters
The phenomenon o f self-synchronization o f unbalanced ro- tors is based on the fact that two or more rotors placed on a common movable base and excited by independent asyn- chronous motors rotate with equal or multiple frequencies and with certain phase differences. It can take place even i f the rotors are not linked kinematically or electrically. It is es- sential that this conformity o f rotor motions occurs in spite of the difference between the partial angular velocities. 13 The quest for synchronous rotation is so strong that even i f one or several motors are switched off the synchronization is not broken, ie, the rotors which are not excited can continue to move for an indefinitely long time. The energy supporting their motion is transmitted from the motors, still switched on, through the vibrating base.
The observation of this effect by Pliss and Abramovitch (1948) gave impetus to the investigation o f this phenome- non. During prolonged testing o f vibromachines with two vibroexciters, that is unbalanced rotors, driven by two asyn- chronous electric motors a wire feeding one o f the motors was broken. This open-circuit was detected only after several hours, because the machine continued operating normally. The physical explanation and mathematical description o f this fact was given by Blekhman (1953).
Later these investigations were continued and extended mainly by Russian scientists. The review and presentation o f main results on the subject are given in Blekhman, (1971; 1981). The first patent on the simplest concrete devices with self-synchronizing rotors was granted in 1950, though the first application was made in Sweden as far back as 1946.
A rather general system with mechanical vibroexciters is presented in Fig 17. The exciters are placed on bodies Bi, .... B,. They can be both active self-rotatory, ie, unbalanced ro- tors 1, or crank-rod mechanisms 4 driven by asynchronous motors, and passive, ie, rollers 2 inserted into sleeves or rings 3 on fixed axes. The active exciters and the bodies B~,..., B,, can be connected to each other and to a fixed base by springs and damping elements and by some kinematic
links. The main problem of synchronization o f vibroexciters is
the determination of the existence of condit ions for synchro- nous motions, ie, motions for which all vibroexciters revolve with equal or multiple angular velocities in spite o f different partial velocities. 14 The solution o f this problem requires the investigation o f a nonlinear k + v degree-of-freedom system, where k is the number o f exciters and v is the total number of degrees of freedom of bodies Bi ..... B,,.
6.2 Systems with almost uniform rotations
Systems with mechanical exciters, or unbalanced rotors, driven by asynchronous motors may be considered a particu-
13 By nartial we mean the angular velocities of rotors placed on fixed base. 14 ~ The partial velocities of rollers and rings are equal to zero.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
746 Blekhman et al: Synchronization and chaotization
lar example o f more general systems, which we call systems with almost uniform rotations. These are systems character- ized by generalized coordinates ~ , (s = 1 ..... k) and u~(r = 1 ..... v ) and described by equations of the form
where I,, K~ and co are positive constants, ~,. = +1, n~ are
integral positive numbers, ~t > 0 is a small parameter, the E,r
- - d O O m, ~,,,. are the Euler operators, L is the Lagrangian
function, and the Q,,~ are generalized non-conservative forces. Functions L, Q,,., and do,. may depend on both the generalized coordinates and velocities o f the system and time t. The functions are 2r~-periodic on q~.,. and 2rdco-periodic on
t. These functions Q,r and ~,. may also depend on ta. The
functions ~,. are determined from the condition o f identity o f Eq (24) and the initial Lagrange equations o f second order for the coordinates q~,.. We call the coordinates q~.~ and u, rota- tory and oscillatory coordinates respectively. The generating equations obtained from Eq (24) for la = 0 admit the family o f solutions
0 cp.,. = ~(n,.oot + as) (26)
depending on arbitrary parameters oh,..., et a. We assume that the generating equations obtained from Eq (25) by substitu- tion o f thesolution (26) for any cz, admit asymptotically sta- ble 2re/co -periodic solutions u°,.
The following assumption obtained by the Poincar6- Lyapunov small parameter method is valid for the described system (Blekhman, 1971; 1981). The solutions of Eq (24), (25) corresponding to synchronous motions having the form
q),. = ~,.(n.,.cot + or.,. + ~t,.(t,l.t )),
u,. = u°(t) + v,.(t,~t), (27)
where ~.,. and v r are 2rdo) -periodic functions of t which equal zero for la = O, can exist only for certain values o f cq ..... cz k. These values satisfy the equation
where Q~,. like Q,,r are generalized non-conservative forces; s = 1,..., k. 15
The existence and stability o f solutions (27) correspond- ing to each solution o f Eq (28) can be determined from a k-th order algebraic equation
( 08. _ ] det ~. 8o~ j 6 rjK) = O, ( s , j = 1,..., k) (29)
Appl Mech Rev vol 48, no 11, part 1, November 1995
If all roots of this equation have negative real parts then the respective solution is asymptotically stable. If there is at least one root with a positive real part then the solution is un- stable. The case of a root with zero real part requires addi- tional investigation.
6.3 Integral criterion of stability, or extreme properties, of synchronous motions
Let us introduce the averaged Lagrangian
A = . . . . . = ( [ t ] ) (30)
and suppose that there exists a function B --~B(al ..... eta), which is the potential of the averaged non-conservative forces, such that
([ 0"r° ]/ 0. 0o, J/ ~ s r = I
Then the above assumption may be formulated in the following form (Blekhman and Lavrov, 1960; Blekhman, 1960; Blekhman and Malakhova, 1990): for sufficiently small ~ a single asymptotically stable solution (27) corresponds to each point of robust minimum 16 for the function
D = D(a I ..... ak) = - (A + B). (32)
This solution turns into a gerierating one if ~ = 0. The absence of a minimum, which is detected in the same way as its availability, means that the solution is unstable. In other cases, additional studies have to be made.
The assumption formulated above was called an extreme property, or integral criterion, o f synchronous motion stability. This sign can be considered as an analog of classical Lagrange-Dirichlet theorem on the stability o f equilibrium states of conservative systems. The function D plays the role of potential energy and therefore was named the potential function.
We now make some additional remarks: 1) When we are interested in the self-synchronization
problem, the systems are autonomous, and the functions p, and D depend only on the differences an - ak ..... etk_n - c~k In this case, Eq (29) always has a zero root. This root has no influence on stability, and the integral sign of stability corresponds to minima over pointed differences. Using this criterion, we obtain the condition for asymptotic orbital stability.
2) If 0B << ~A or B = const, we can set
D -- -A. (33)
3)Let the Lagrange function o f the system can be written in the form
L = L* + Lea+ LCm, (34)
15 Square brackets denote computation of the inner expression by substitu- ting the generating solutions into this expression. Angular brackets mean time averaging operation over period T= 2rdco.
16 By "robust minimum" we mean the strict extremum of a function detected by the analysis of terms of second order in the expansion of this function in the neighborhood of a stationary point.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
Appl Mech Rev vol 48, no 11, part 1, November 1995
where k v k
v : . . . . . . . . . .
s=l r=l s=l v v v v
r=l ]=1 r= l j = l
L (z') = V((0, ..... +, ,q~, ..... ,~),
(35)
where a,: i and b a are constants, and %,.[~ and F~ are periodic functions of ~.~. with the period 2ft. Let a lso [Q,,] = 0, ie, non-conservative forces associated with the coordinates Ur are not available in the generating approximation. Therefore, the systems under consideration are quasilinear and quasi- conservative. Then the following relations are valid:
0A.~ = 0 ' OA 8(A(H) - A(')), (36)
0% ~3a,. 0%
where
and the potential funct ion can be wri t ten as
D = A (1)- A (")- B (38)
The functions L,, U z), and L(m are called the Lagrangians of the synchronizing objects and of systems of carrying and supported connections between the objects respectively (Nagaev, 1965). It is particularly remarkable that A") and ACre appear in Eq (38) with opposite signs.
6.4 Generalizations of integral criteria
The extremal properties have also been established for several other classes of systems and their motions: for synchronous motions of loosely interacting quasiconser- vative objects (Nagaev, 1965), for quasilinear oscillators and canonical systems (Valeev and Ganiev, 1969), and for systems with quasicyclic coordinates (Khodjaev, 1969). We note that both oscillatory and rotatory motions are possible in the pointed systems. For all these systems an expression for the potential function D was found. The review of obtained results and their applications is given by (Blekhman and Malakhova, 1990). Here we present results for the system of loosely interacting quasiconservative objects. Under the assumption that the value of os = sign edco),
where e.,. (co) = oo -I d*, .,' 7 ~ , O% is the frequency of an isolated
conservative s-th object, and h,(¢o,) is a constant associated with the energy ofs-th object, which is independent of s, the potential function D was obtained in (Nagaev, 1965). It is
D = - ( A + B)o (39)
where o = ~.,.. The sign of D is determined by the sign of the anisochronism characterized by e~. Depending on this sign, Nagaev could differentiate between hard and soft
Blekhman et al: Synchronization and chaotization 747
anisochronous objects. For hard anisochronous objects e~. > 0. A rotor is an example of such a system. For soft anisochronous objects, eg, for point masses revolving around a fixed center due to a gravity force, e~ < 0. If e.,. = ~ then the objects are isochronous. Linear oscillators with 0% independent on h.,. are such objects.
For systems with quasilinear carrying connections the expression (39) can be represented as
D = _ ( A ( Z ) - A(ZO - B ) a (40)
This expression is valid under sufficiently general assumptions on the character of the supported connections. In the expression (40) as well as in (38) Aq) and ACre are the averaged Lagrangians of the systems of carrying and sup- ported connections calculated in the generating approxima- tion. We note that for the problem of synchronization of quasiconservative objects the stability conditions expressed by the integral criterion are only robustly necessary. It means that the absence of a minimum of function D determined via analysis of second order terms in the expansion of D about the stationary point indicates the instability of the considered motion.
6.5 External synchronization, or capture, of unbalanced rotors motions
Previously, we have considered the problems of mutual (inner) synchronization in systems with almost uniform rota- tions. However, as in the case of self-oscillatory systems, some of these problems may be formulated as problems of external synchronization, or capture, by external action with some given frequency co.
In particular, the problem Of exciting and sustaining the running of an unbalanced rotor by a given vibration of its axis is of great practical importance (see Fig 18). Under the action of a vibration at some frequency co, such a rotor can
run stably with a mean frequency (~) = + p _Woo, wherep and q
are positive integers. The simplest regime when p = q is of great interest. For this regime there are the largest regions of existence and of stability in the parameter space and of at- traction in the phase space. Moreover, in this case the trans- fer of energy from the source of the vibration to the unbal- anced rotor can be very large. In practical systems it can be 1000 kW and more.
Fig 18. An unbalanced rotor
@ with a vibrating axis.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
748 Blekhman et al: Synchronizalion and chaolization Appl Mech Rev vol 48, no 11, part 1, November 1995
The condition for vibrationally sustaining the running of an unbalanced rotor was obtained by Bogolubov (1950) for the case of plane harmonic vibration and by Blekhman (1954) for the case of an elliptic vibration of the axis. Later this problem was studied by many authors. A short review of these investigations and important applications is given in (Blekhman, 1971; 1981). More recently, chaotic regimes of rotor motion were found [Batalova et al (1982), Batalova and Beljakova (1989), and Bukhalova (1989)].
The condition for existence and stability of the main re- gime (p = q) o f a rotor running under a vibrational excitation of its axis along an elliptic trajectory with half-axes a and B was given by Blekhman ( 1971 ):
meo~2A > R(e0) (41)
Here m is the mass of the rotor, e is its eccentricity, R(e0) is the moment of the resisting forces, A is the so-called effec- tive amplitude of vibration defined by expression A = ½ (a + or*b), where ~* = 1 if the directions in which the rotor is run- ning and its axis is moving coincide and c~* = -1 otherwise.
Blekhman (1971; 1981) also considered the action of vi- bration on the unbalanced rotor of a motor. It was shown that the rotation with :frequency 0~0 (in the absence of vibration) may be for certain conditions captured by frequency o~ e 6%.
6.6 Several important applications
6. 6.1 Just!fication of tendency to synchronization for some n,pes of loosely coupled dynamical objects
By means of integral stability criterion, the tendency to syn- chronization was proven under sufficiently general assump- tions for several important classes of dynamical objects (Blekhman, 1971), including objects with quasiuniform rota- tions and quasiconservative objects. The procedure of proof is rather simple: functions A, A(a, and AcI/~ which are the main part o f the potential function D are periodic with re- spect to cq,..., ct k, (or cq - oct, . . . , elk_ ~ - ct k for autonomous systems). Therefore, under rather general assumptions the function D has minima. In other words, it can be shown that in the space of parameters cq,..., elk, (or cq - ctk, ... , ak-~ - Gtk) potential wells corresponding to stable synchronous mo- tions do exist. This general approach suggests that the exis- tance of often-encountered synchronisms (resonances) be- tween the rotation frequencies of celestial bodies is a natural phenomenon (also see below).
6. 6.2 Application to the theoo~ of mechanical exciters of vibration (unbalanced rotors)}
The system with mechanical vibroexciters described above practically anytime may be considered as the system with quasiuniform rotations described by differential Eqs (24), (25). Hence the results presented above can be applied to this system. In so doing, the rotatory generalized coordinates q0, are the angles of the rotor 's rotation, and the oscillatory coordinates u,. are coordinates of bodies B1 ..... B,. The form of the left sides of Eqs (28), (29) determining the phases of stable synchronous motions of rotors for a number of practically important systems, is given in the monographs by
Blekhman (1971; 1981). Different vibromachines and de- vices with self-synchronizing vibroexciters are also de- scribed there. The integral criterion of stability is a conven- ient tool for the study and calculation of such machines and devices.
Let us begin with the expression for potential function D in the case when there are only active vibroexciters (1 and 4) linked by supported connections and having equal partial angular velocities. We also assume that exciters are placed on a rigid body connected to a fixed base. Provided the mo- tion is non-resonant and the decrement may be neglected, the value of B in (38) equals zero. In this case A im also equals zero and
where [71/~] and [pI/)] are, respectively, kinetic and potential energies, which are calculated under the assumption that the
rotors run uniformly so that q~s = ~0 = as (cot + a s) and the
body executes steady vibration under the action of driving forces generated by exciters.
6. 6. 3 Generalization of the classical principle of se(f-balancing
As early as 1884, the Swedish engineer Laval found the phe- nomenon of self-balancing for an unbalanced disk on a flex- ible shaft. Due to this effect, the center o f gravity of the disk is positioned practically on the rotation axis. As a result, the forces acting on the shaft bearings become smaller. This ef- fect is observed if the frequency of rotation o f the disk e0 is higher than the frequency of free oscillations of this disk. Self-balancing is widely used in machines.
In the case when the expression (42) is valid, the gener- alization of self-balancing principle for systems with many rotors follows from the integral criterion o f stability. This generalization is as follows. For supercritieal frequencies 17 co, 7~n ~> p~/~ and
Therefore, only those phases of rotor motions are stable for which the rotor unbalancings compensate each other re- sulting in minimization of 7rl). In particular, if such a relation between phases is possible that 7t~ = 0, ie. the rigid body is stationary, then these phases are stable. This relation be- tween phases is said to be compensating.
A more detailed consideration of the expression (42) and an analysis of several examples allow us to formulate the fol- lowing generalized principle of self-balancing of rotors. For individual rotors or several synchronously rotating rotors in- volved in a unified oscillatory system and exciting its vibra- tion, the tendency for the vibration decay is detected if the frequencies of rotation are supercritical. On the contrary, for subcritical frequencies the oscillations of the body increase. For intermediate frequencies both effects are possible.
17The frequencies so which are higher than all the natural frequencies of the system are called supercrilical.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
Appl Mech Rev vol 48, no 11, part 1, November 1995 Blekhman e t a l : Synchronization and chaotization 749
The justification of the principle and various technical applications are contained in the works of Blekhman (1971; 1981).
6. 6. 4 Application to the problem on resonances, or synchronisms,.['or the motion o f celestial bodies
Many investigations, both classical and modern, are devoted to the problems on resonances (or synchronisms) in systems of many bodies. Below we will consider mainly the results following from the theory presented above.
In 1973, Ovenden et al (1974) formulated a heuristic principle of least interaction: satellite or planetary systems of N bodies interacting via gravitational pull will spend most of the time in the configuration with the minimal average force function of perturbations. This configuration will be reso- nant, ie, there will be certain resonance relations among the mean frequencies of revolution. The force function of per-
- N - - N mim] turbations is defined as Up = Z i = l Z / > i f - h 7 where the mi
are masses of the satellites, 9+/is the distance between them andf is the gravitation constant. The model calculations have shown that the resonance configuration provides minimal in- teraction.
This principle is closly related to the classical results of Poincar6 (1892, 1893, 1899). It follows that synchronous (resonant) mean motions of planets correspond to stationary points of averaged function Up calculated for unperturbed motion.
Blekhman (1981) has shown that from Eq (40) it follows that, stable with respect to initial differences of phases, syn- chronous motions correspond to minima of averaged interac- tion potential. Indeed, in this case the objects are softly ani- sochronous and expression (40) has the form
where 7~/) i s the kinetic energy of the central body and square brackets mean that respective values are calculated for unperturbed (Kepler) orbits.
Assuming that the mass of the central body is much greater than the masses m~,..., rnN and that dissipation is small, we obtain
D r ( U p ) . (45)
For the majority of the bodies of the solar system, the un- perturbed orbits have small eccentricities e+ and orbital planes have small relative inclinations J~i. For the analysis of possible resonances the function D can be expressed as a power series 18 in e,. and v,. = sinZ(Jj2). If only the zero order terms corresponding to circular orbits laying in the common plane are taken into account, then 1:1 resonances are possi- ble. These resonances correspond to revolutions with equal average angular velocities. If n-order terms are taken into account then the resonances of the kind l : (1 _+ n) and l : (l _+ (n + 1) can be determined. Obviously, with the increase of n, the resonant interactions of bodies become less and less cou-
18This expansion has been obtained by Veretinsky.
pied. Thus, the integer n can be referred to as the order of resonance (see also Poincar6's classification of periodic mo- tion).
From the above reasoning, it is clear that most o f the resonances in the solar system have order of at most 2. Such resonances are called simple ones. it is natural to suppose that the hypothesis by Molchanov (1973) is valid only for the simple resonances. The extremal property of resonance motions allows one to test the hypothesis on the closeness of the planet or satellite system to resonance. For this test we can compute the value of function D for an observed motion and compare it to the corresponding minimal values of this function. It is also of interest to determine how the function D is varying in the process of its evolution.
it has been mentioned that the results offer a general theo- retic explanation of relatively frequent resonances in orbital motions of celestial bodies: this is the consequence of the tendencies to establish synchronisms. The hypothesis of the resonance nature of rings of the Uranus is connected with the understanding of this fact.
On general grounds about synchronisms in the solar sys- tem, a hypothesis on the resonant nature of the rings of Uranus has been put forward. According to this hypothesis, the positions of these rings are determined by resonant inter- actions of the kind 1:2, 2:3, and 3:4 with unknown satellites. These satellites were later discovered by "Voyager-2" (Gorkavy and Fridman, 1987).
The integral criterion of stability based on (40) cannot be used for problems of rotation - revolution resonances be- cause of the difference between characters of anisochronisms for revolutions and rotations of body (for the first case ~ = - 1 and for the second case ~ = 1). That is why we have spo- ken above about resonance in the revolutions of celestial bodies only. In the same time, the stability criterion proposed in the works of Beletsky and Shljakhtin (1976) and Beletsky (1981) does not contain the character of anisochronism. The numerical experiments of Beletsky and Shljakhtin (1976) are in agreement with this criterion.
7 CONCLUSIONS
In this review, we outlined the consideration of synchroniza- tion of systems executing periodic and chaotic motions, both oscillatory and rotatory, from a general point of view. It is shown that the synchronization phenomenon goes hand in hand with the chaotization phenomenon. We saw that reso- nantly interacting systems synchronize, as a rule, and non- resonant or strong interaction leads to chaotization of oscilla- tions in coupled systems.
From the results set forth in this review, we can conclude that in all considered cases the formulation of the main prob- lems of synchronization and some of the laws of this phe- nomenon have many common features. First of all, the no- tion of synchronization in itself is the same for all kinds of systems. Moreover, for a determination of synchronous re- gimes and an investigation of their stability, we can use the same methods. Although the notion of synchronization as the coincidence of appropriate functionals is the same for all
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
750 Blekhman et al: Synchronization and chaotization Appl Mech Rev vol 48, no 11, part 1, November 1995
systems, the choice of specific functionats depends on the type of motion. So, for periodic self-oscillatory systems, the fundamental frequencies serve as such functionals. In the case of rotating objects this role is played by the mean partial angular velocities. For synchronization of periodic systems, both rotatory and oscillatory, the synchronization threshold equals zero, whereas it is nonzero for chaotic systems.
Let us point to several essential differences observed at the synchronization of two kinds of systems.
1. For systems with rotatory motions the character of a synchronous regime essentially depends, as a rule, on the di-
rections of rotations, ie. on numbers ~ ' = _+1. For self-oscil-
latory systems the notion of direction of rotations is absent, but for certain types of systems the phase shift between dif- ferent dynamical variables may play such a role.
2. For systems with rotations the character of the stable synchronous motion essentially depends on the number of degrees of freedom of the coupling system. On the contrary, for self-oscillatory systems such dependence is probably ab- sent. Indeed, the behavior of two pendulum clocks hanging on a slender beam is qualitatively the same as if the pendula were connected directly by a weightless spring 19. On these grounds, in the examples considered above the coupling was taken to be linear and non-inertial.
3. Finally, at synchronization of rotatory motions the power transmitted from one object to the other can be con- siderably more than in the case of synchronization of oscil- lating mechanical objects. This fact predetermines the wide practical use of the phenomenon of self-synchronization of rotating bodies, whereas self-synchronization of oscillating mechanical objects is rarely used at this time.
Consideration of synchronization phenomena for self-os- cillatory and self-rotatory systems from a general standpoint may help to predict the existance of effects not known for the given type of system. For example, using the outlined re- sults concerning chaotization of self-oscillatory systems, we can expect that a similar effect must take place in self-rota- tory systems too. In the present review we have almost ig- nored this phenomenon, as well as synchronization in cha- otic rotatory motions, because the correspondiflg research is just beginning.
A very interesting question is, why can ~ome systems synchronize while others cannot? What is the cause of the different behavior of classical self-oscillatory systems and chaotically oscillating driven nonlinear oscillators? The an- swer is that there is a principal difference between these sys- tems, in spite of the fact that they satisfy formally the defini- tion of self-oscillatory systems (existence of the attractor, in- dependence of the oscillation spectrum on the spectrum of the source). Classical self-oscillatory systems are systems with feedback, which gives the possibility of adjusting to the frequency (or frequencies) in accord with the external action, whereas chaotic nonlinear oscillators have no feedback loop. Evidently, the tendency to synchronization of self-oscillatory and self-rotatory systems is caused exactly by the presence of this loop. (The systems with high-frequency energy
19 Such coupling may be called non-inertial.
sources like the electrical-mechanical system considered above also have the feedback loop and in the periodic regime can synchronize. The synchronization of such systems in the chaotic regime has not been studied yet.) Hence, although such systems cannot be distinguished from the mathematical point of view, because nonautonomous equations can be changed to autonomous ones by the appropriate substitution of variables, from the physical point of view they are differ- ent. This difference consists in the presence or absence of the feedback and shows itself in the tendency to synchroniza- tion.
The phenomena of synchronization of chaotic systems and chaotization of periodic systems by external periodic ac- tion may be used for controlling the characteristics of oscillations of the system, eg changing the dimension. Such control can be fruitful for a number of practical purposes in engineering and medicine.
APPENDIX A: FAST DETERMINATION OF ONE OF THE FREQUENCY REGIONS OF SYNCHRONIZATION
The calculation of the frequency J~ at which the system is very sensitive to the external action, is based on the following assumption: the dynamical system will resonantly react to the periodic force if the frequency of the force is close to the frequency f,,, at which the system oscillates most often (Rosenblum, 1993). According to such a definition, the frequency fm can be calculated with the use of the analytic signal approach.
The concept of an analytic signal was introduced by Gabor (1946). Let s(t) represent an arbitrary signal. The analytic signal is a complex function of time given by
~(t) = s(t) + j s . (t) = A(t)e j¢(*)
where the function SH(t) is related to s(t) by the Hilbert transform relation
s . (t) = =-' [oo dr J-oo l - - T
(46)
where the Cauchy principal value is used in the improper integral. The envelope (instantaneous magnitude) A(t) and instantaneous phase ¢(t) of the signal t~(t) may be defined by
sH(t) The A(t )=~[J( t )+s2( t ) and ~(t)= arctan s(t) "
instantaneous frequency ,~t) is the time derivative of the instantaneous phase
s 2(') d (sH(t) I hn(t)s(t)--SH(t)D(t)(47) f ( t ) : s2/,) +s Z t - T y - ) = A2(t)
From (46), the Hilbert transform s~t) of s(t) is the convolution of s(t) and l/nt. Hence, the Fourier transform Sn(/'oo ) of s~t) is the product of the Fourier transforms of s(t) and l/n t. For physically relevant frequencies co > 0, S,~,/o)
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
Appl Mech Rev vol 48, no 11, part 1, November 1995
= -jS(l'oo). This means that ideally sH(t ) may be obtained from s(t) by a filter whose amplitude response is unity, and whose phase response is a constant rd2 lag at all frequencies (Panter, 1965). Approximately, for discrete signals given within the bounded time interval, this can be done by a digital filter. The Hilbert transform of a signal can be obtained by calculating the convolution of the response function of the filter and the signal.
In its turn, the frequency f,, can be obtained as the most probable value of instantaneous frequency f i t ) . It may be easily determined from the probability distribution offlt).
We have calculated the fro for the Lorenz system (15). The valuer,, = 0.74 obtained by us (Fig Al) is very close to the frequency .£. ~ 0.68 correSponding to synchronization by minimal amplitude force at its fundamental frequency (the period of synchronous oscillations equals that of the force), (Landa el al, 1989).
The frequency fm may not dominate or correspond to a spike in the power spectrum of the system (Fig A2).
REFERENCES
1. Afraimovitch V, Vefitchev N, and Rabinovitch M, (1986), Stochastic synchronization of oscillations in dissipative systems, Radiophys and Quantum Electron, 29(9), 795-803.
i
0.00 0.46 0.93
frequency Fig A1. The probabi l i ty dis t r ibut ion o f the instantaneous f requency for the x coordinate o f the solution o f the Lorentz equations.
,Z
~0,~ ~ 1,~ 1,~ 1,90 2Ag , ~ 3,48 3,~
frequency, Hz
Fig A2. The power spectrum S ~ of the x coordinate of the so- lution of the Lorenz equations. The most probable value of the instantaneous frequency is shown.
Blekhman et al: Synchronization and chaotization 751
2. Andronov A, Vitt A, and Khaykin S, (1966), Theory o[" Oscillations. Gostekhizdat, Moscow, 1937. (In Russian); English Translation: Pergamon Press, Oxford - NY Toronto.
3. Anishchenko V, (1990), Complicated Oscillations in Simple Systems, Nauka, Moscow, (In Russian).
4. Anishchenko V and Astakhov V ('1983), Bifurcations in autostochasic generator with regular external excitation, Sov Phys Tech - Phys, 28(1 I), 1326-1329.
5. Anishchenko V, Letchford T, and Safonova M, (1984), Stochasticity and the disruption of quasiperiodic motion due to doubling in a system of coupled generators, Radiophys and Quantum Electron, 27, 381-390.
6. Anishchenko V, Letchford T, and Safonova M, (1985), Synchro- nization effects and bifurcations of synchronous and quasiperiodical oscillations in nonautonomous generator, Radiophys and Quantum Eleco'on. 28(9), 766-776.
7. Anishchenko V, Vadivasova T, Postnov D, and Safonova M, (1991), (1991), Forced and mutual synchronization of chaos, Soy J Commun Tech Electron, 36(2), 23-34.
8. Appleton E, (1922), "Automatic synchronization of triode oscillator," Proc Cambridge Philos Soc (Math and Phys Sci), 21.
9. Babitzky V and Landa P, (1983), Self-excited vibrations in systems with inertial excitation, Sov Phys-Dokl, 27, 826-827.
10. Babitzky V and Landa P, (1984), Auto-oscillation systems with inertial self-excitation, ZAMM, 64, 329-339.
11. Babloyantz A and Destexhe A, (1986), Creutzfeld - Jacob disease in the hierarchy of chaotic attractors, In: M Markus, S MUller, and G Nicolis, editors, From Chemical to Biological, pp 307-316, Springer, New York.
12. Batalova Z and Beljakova G, (1988), Stability diagrams of the periodic motions of a pendulum with an oscillating axis, J Appl Math Mech, 52( 1 ), 41-48.
13. Batalova Z, Bukhalova N, and Neimark Y, (1982), "Bifurcations of the phase portrait for unbalanced rotor on the periodically vibrating base leading to chaotization of its motion," In: Y Neimark, editor, Dyn of Sys (NumerMethods ofDyn SystStudy), pp 112-126, Izd. GGU, Gorky, (In Russian).
14. Beletsky V, (1981), "Extremal properties of resonance motions," In: Stability o/" Motion, Analytical Mechanic's, Control o/" Motion, Nauka, (In Russian).
15. Beletsky V and Shljakhtin A, (1976), Extremal properties of resonant motion, Sov Phys-Dokl, 21 (12), 721-723.
16. Bezaeva L, Kaptsov L, and Landa P, (1986), Synchronization threshold as the criterium of stochasticity in the generator with inertial nonlinear- ity, Sov Phys-Tech Phys, 31(9), 1105-1107.
17. Bezaeva L, Kaptsov L, and Landa P, (1987), Study of chaotic modula- tion ingenerator with inertial nonlinearity at parametric external action, Sov J Commun Tech Electron, 32(8), 169-171.
18. Blekhman 1, (1953), Vibrator self-synchronization in some vibromachi- nes, lnzhenerny sbornik, 16, (In Russian).
19. Blekhman 1, (1954), Rotation of an unbalanced rotor due to harmonic oscillations of its axis, lzv Akademii Nauk SSSR. OTN, (8), (In Russian).
20. Blekhman 1, (1960), Justification of the integral criterion for stability of motion in the problem of autosynchronization vibrators, J Appl Math Mech, 24(6), 1665-1670.
21. Blekhman I, (1971), Synchronization of Dynamical Systems, Nauka, Moscow, (In Russian).
22. Blekhman 1, (1981, 1988), Synchronization in Science and Technology, Nauka, Moscow, (In Russian); English translation: 1988, ASME Press, New York.
23. Blekhman I and Lavrov B, (1960), On an integral criterion for stability of motion, J Appl Math Mech, 24(5), 1416-1421.
24. Blekhman 1 and Malakhova O, (1990), Extremal criteria of the stability of certain motions, J Appl Math Mech, 54(1 ).
25. Bogolubov N, (1950), "Perturbation theory in nonlinear mechanics," In: Collection of works of the lnstitut o f Construction Mechanic's o f AN UkrSSR, vol 14, pp-9, (In Russian).
26. Bukhalova N, (1989), "Investigation of Parametrically Excited Rotor Dynamics," PhD thesis, Gorky State Univ, Gorky, USSR, (In Russian).
27. Bumyalene S, Piragas K, and Cenis A, (1990), Investigation of the di- mensionality of a strange attractor and of the amplitude threshold of synchronization of chaotic self-excited oscillations of photocurrent in n-type ge(ni), Soy Phys-Semiconductors, 24, 945-948.
28. Cartwfight M and Littlewood J, (1945), On nonlinear differential equa- tions of the second order, I - Equation
jk- k(l _ y2 )jp + y = b~k cos(~t + a ) ,k large J London Math So,:.
Downloaded From: http://appliedmechanicsreviews.asmedigitalcollection.asme.org/ on 09/29/2013 Terms of Use: http://asme.org/terms
752 Blekhman et al: Synchronization and chaotization
29. Dmitriev A and Kislov V, (1982), Strange attractor in the non-autono- mous van der Pol equation, Radio Eng Electron Ph.vs, 27(12), 154-156.
30. Dmitriev A, Kislov V, and Spiro A, (1983), Chaotic oscillations in nonautonomous generator with a reactive nonlinearity, Radio Eng Electron Phys, 28(12), I 15-124.
3I. Dykman G, Landa P, and Neimark Y, (1992), Synchronizing the cha- otic oscillations by external force, Chaos, Solitons & FractaLv, 1(4), 339-353.
32. Gabor D, ( 1946), Theory of communication, J lEE London, 93(3), 429- 457
33. Gaponov-Grechov A, Rabinovitch M, and Starobinetz I, (1984), Dynamic model of the spatial development of turbulence, JETP Letters, 39(12), 688-69 I.
34. Gorkavy N and Fridman A, (1987), Vojager-2 discovered the predicted satellites of Uranus, proving that its rings result from resonances, Sov Astron Lett. 13(2), 96-99.
35. Grasman J, Nijmeijer H, and Veling E, (1984), Singular perturbations and a mapping on an interval for the forced van der Pol relaxation oscillator, Physica D, 13, 195-210.
36. Grassberger P, (198 I), On Hausdorff dimension of fractal attractors, (1981), Star Phys, 26, 173-179.
37. Grassberger P and Procaccia 1, (1983), Characterisation of strange at- tractors, Pl~vs Rev Lett, 50, 346-349.
38. Guckenheimer J. (1980), Symbolic dynamics and relaxation oscilla- tions, Physica D, I, 227.
39. Gurtovnik A and Neimark Y, (1974), Synchronization of dynamic sys- tems, J Appl Math Mech, 38, 749-758.
40. Herrmann J and Wilhelmi B, (1984). Laser.[i~r ultrakurze Lichtimpulse. Grundlagen und Anwendungen. Akademie-Verlag, Berlin.
4 I. Huygens C, ( 1673), Itoroloqium Oscilatorium. Parisiis, France. 42. Kalyanov E and Lebedev M, (1985), Stochastic oscillations in the sys-
tem of coupled generators with inertion, Sov J Commun Tech Electron, 30(2), 105-108.
43. Kaneko K. (1983), Doubling of torus, Progress 0I Theoretical Pl~vs, 63(6), 1806-1810.
44. Kaneko K, (1984), "Oscillation and doubling of toms," Progress q[" Theoretical Phys. 72(2), 202-215.
45. Kaplan J and Yorke J, (1979), Chaotic behavior of multidimensional difference equations Lect Notes in Math, 730, 204-227.
46. Kaptsov L, (1975), Appearance of spiked mode in nonautonomous generator with inertial non-linearity, Radio Eng Eleco'on Phys, 20(12), 45-49.
47. Khodzaev K, (1969), Integral criterion of stability for systems with quasicyclic coordinates and energy relations for oscillations of current- carrying conductors, J Appl Math Mech, 33( 1 ), 76-93.
48. Kurjatov V, Landa P, and Lariontsev E, (1968), Frequency responces of ring laser on vibrating ground, Radiophys Quantum Electron, !1(12), 1040-1046.
49. Kuznetsov Y, Landa P, Ol'khovoi A, and Perminov S, (1985), Relationship between the amplitude threshold of synchronization and the entropy in stochastic self-excited systems, Soy Phys Dokl, 30(3), 221-222.
50. Landa P, (1980), Se(/- Oscillations in Systems with Lumped Parameters.. Nauka, Moscow, (In Russian).
51. Landa P and Duboshinsky Y, (1989), Self-oscillatory systems with high-frequency energy sources, Soy Ph.vs Usp, 23(8), 723-731.
52. Landa P and Perminov S, (1985), Interaction of periodic and stochastic self-oscillations, Radiophys and Quantum Electron, 28(4), 284-287.
53. Landa P and Perminov S, (1987), Synchronization of chaotic oscilla- tions in the Mackay-Glass system, lzv VUZov. Radiofizika, 30(3), 437- 439, (In Russian).
54. Landa P, Rendel Y, and Sher V, (1989), Synchronization of oscillations in the Lorenz system, lzv VUZov. Radiofizika, 32, 1172-1174, (In Russian).
Appl Mech Rev vol 48, no 11, part 1, November 1995
55. Landa P and Rosenblum M, (1992), Synchronization of chaotic self-os- cillatory systems, Sov Phys Dokl, 37(5), 237-239.
56. Landa P and Rosenblum M, (I 993), Synchronization and chaotization of oscillations in coupled self-oscillating systems, Appl Mech Reviews. 46(7), 414-426.
57. Landa P and Tarankova N, (1975), Voltage-current characteristics of Josephson junctions, Radio Eng Electron Phys, 20(2), 82-87.
58. Landa P and Tarankova N, (1976), Synchronization of generator with modulated natural frequency, Radio Eng Electron Ph.vs, 21(2), 34-38.
59. Levi M, (1981), Qualitative analysis of the periodically forced relaxa- tion oscillation, Mem of Am Math Soc, 32,244.
60. Levinson N, (1949), Second order differential equation with singular solutions, Ann of Math, 50, 127-153.
61. Malakhov A, (1968), Fluctuations in Se(/~Oscillatory Systems. Nauka, Moscow, (In Russian).
62. Mandelshtam L and Papaleksi N, (1947), "On the n-th kind resonance phenomena," In Collected Works by LI Mandelshtam, vol 2, pp 13-20, lzd Akademii Nauk, Moscow, (In Russian).
63. Meacham L, (1938), Proc IRE, 26, 1278. 64. Molchanov A, (1973), "Resonance structures in the solar system," In
Modern Problems of Celestial Mechanics and Astrodynamics. Nauka, Moscow, (In Russian).
65. Nagaev R, (1965), General problem of synchronization in an almost conservative system, J Appl Math Mech, 29, 953-962.
66. Neimark Y and Landa P, (1987, 1992), Stochastic and Chaotic Oscillations. Nauka, Moscow, 1987. (In Russian), English translation: 1992, Kluwer Academic, Dordrecht, Netherlands.
67. Ovenden M, Feagin T, and Graft O, (1974), On the principle of least interaction action and the Laplacian satellites of Jupiter and Uranus, Celest Mech, 8, 455-471.
69. Parker T and Chua L, (1983), Computer-assisted study of forced relaxa- tion oscillations, IEEE Trans on Circuits and Syst, 30.
70. Pecora L and Carroll T, (1990), Synchronization in chaotic systems, Phys Rev Lett, 64(8), 821-824.
71. Pecora L, and Carroll T, (1991), Driving systems with chaotic signals, Phys Rev A, 44(4), 2374-2383.
72. Pliss D and Abramovitch I, (1948), "Devising a vibrational technique of dry separation of mineral resources," Technical report, "Mekhanobr" Inst, Leningrad, (In Russian).
73. Poincar~ H, Les methodes nouvelles de la mecanique celeste, Paris, 1892, 1893, 1899.
74. Rayleigh J, (1945) Theory o f Sound, Dover Publ. 75. Rosenblum M, (1993), Characteristic frequency of chaotic dynamical
system, Chaos, Solitons Fractals, 3(6), 617-626. 76. Stratonovitch R, (1961), Selected Problems on the Theory o f
Fluctuations in Radio Engineering. Sov Radio, Moscow, (In Russian). 77. Teodorchik K, (1945), Generators with inertial nonlinearity, DAN