VDI-Berichte Nr. 1980, 2007 83 Standardisierung gehobener Regelungsfunktionen als Messstellen-Typen Standardization of Advanced Process Control Functions in Form of DCS-Templates Dr.-Ing. B-M. Pfeiffer, Siemens AG, Karlsruhe Kurzfassung Ein Messstellen-Typ (Template) in einem Prozessleitsystem ist eine standardisierte Vorlage zur Erstellung von Signalflussplänen, die bei der Automatisierung einer Anlage mehrfach vorkommen. Die Signalflusspläne (CFC: Continuous Function Chart) für viele Messstellen ähnlicher Art werden also durch Bildung von Instanzen eines Messstellen-Typs per Knopf- druck erzeugt und müssen anschließend nur noch parametriert und mit konkreten Mess- und Stellwerten verbunden werden. Parametrierung und Verschaltung können mit Hilfe einer Im- port-Datei automatisiert werden. Mit der Advanced Process Library von Simatic PCS7 wird erstmals versucht, das Konzept der Messstellen-Typen auf gehobene Regelungsfunktionen (Advanced Process Control) auszudehnen, z.B. für PID Gain-Scheduling, ablösende Rege- lung (Override-Control), Smith-Prädiktor Regelung für Totzeitstrecken, dynamische Störgrö- ßenaufschaltung (Lead-Lag Feedforward Control), Fuzzy Control und modellbasierte Prädik- tivregelung. Abstract A DCS-Template is used to generate continuous function charts that are needed in large numbers of instances for the automation of one plant. Chart instances are automatically sup- plied with parameter values and signal names from an import file. In the Advanced Process Library of Simatic PCS7, this concept is extended to advanced process control functions for the first time, e.g. PID Gain-Scheduling, override control, Smith-predictor for deadtime proc- esses, lead-lag feedforward control, fuzzy control and model-based predictive control (MPC). 1. Einführung Anhand von Beispielen für Messstellen-Typen (Templates) in einem Prozessleitsystem wird deutlich, welche Art von Funktionen darin zusammengefasst sind. Ein Messstellen-Typ für
Transcript
VDI-Berichte Nr. 1980, 2007 83
Standardisierung gehobener Regelungsfunktionen als Messstellen-Typen Standardization of Advanced Process Control Functions in Form of DCS-Templates Dr.-Ing. B-M. Pfeiffer, Siemens AG, Karlsruhe Kurzfassung
Ein Messstellen-Typ (Template) in einem Prozessleitsystem ist eine standardisierte Vorlage
zur Erstellung von Signalflussplänen, die bei der Automatisierung einer Anlage mehrfach
vorkommen. Die Signalflusspläne (CFC: Continuous Function Chart) für viele Messstellen
ähnlicher Art werden also durch Bildung von Instanzen eines Messstellen-Typs per Knopf-
druck erzeugt und müssen anschließend nur noch parametriert und mit konkreten Mess- und
Stellwerten verbunden werden. Parametrierung und Verschaltung können mit Hilfe einer Im-
port-Datei automatisiert werden. Mit der Advanced Process Library von Simatic PCS7 wird
erstmals versucht, das Konzept der Messstellen-Typen auf gehobene Regelungsfunktionen
(Advanced Process Control) auszudehnen, z.B. für PID Gain-Scheduling, ablösende Rege-
lung (Override-Control), Smith-Prädiktor Regelung für Totzeitstrecken, dynamische Störgrö-
ßenaufschaltung (Lead-Lag Feedforward Control), Fuzzy Control und modellbasierte Prädik-
tivregelung.
Abstract A DCS-Template is used to generate continuous function charts that are needed in large
numbers of instances for the automation of one plant. Chart instances are automatically sup-
plied with parameter values and signal names from an import file. In the Advanced Process
Library of Simatic PCS7, this concept is extended to advanced process control functions for
the first time, e.g. PID Gain-Scheduling, override control, Smith-predictor for deadtime proc-
esses, lead-lag feedforward control, fuzzy control and model-based predictive control (MPC).
1. Einführung Anhand von Beispielen für Messstellen-Typen (Templates) in einem Prozessleitsystem wird
deutlich, welche Art von Funktionen darin zusammengefasst sind. Ein Messstellen-Typ für
VDI-Berichte Nr. 1980, 2007 84
alle Durchfluss-Regelkreise einer Anlage kann folgende Funktionen (Funktionsbausteine)
enthalten: Analogeingabe-Funktion für Regelgröße und Stellungsrückmeldung, PID-Regler,
Analogausgabe-Funktion für die Stellgröße, Sicherheitslogik für Messwertausfall, Regelkreis-
Überwachung (Control Performance Monitoring) sowie eine primitive Prozess-Simulation
(Verzögerungsglied erster Ordnung) für Testzwecke.
Ein Messstellen-Typ für alle Kaskaden-Regelkreise einer Anlage enthält neben zwei PID-
Reglern incl. AnalogFunktionn, Sicherheits- und Überwachungsfunktionen auch die logi-
schen Verknüpfungen, die erforderlich sind, um die stoßfreie Umschaltung zwischen ver-
schiedenen Betriebsarten sowie den Nachführbetrieb des Führungsreglers bei Auftrennen
der Kaskade am Folgeregler zu organisieren.
Weitere regelungstechnisch orientierte Templates sind z.B. Verhältnisregelung, Split-Range-
Viele gleichartige Regelkreise nach diesem Grundmuster können mit Hilfe einer Importdatei
erzeugt werden, in der Parameterwerte und Signalnamen als MS-Excel-Tabelle vorliegen.
Falls bei einigen speziellen Regelkreis-Instanzen Schwierigkeiten wegen nichtlinearen Pro-
zessverhaltens auftreten, werden diese Instanzen entsprechend der Vorlage des Gain-
Scheduling-Templates mit einem zusätzlichen Funktionsbaustein zur Parametersteuerung
erweitert. Nach derselben Vorgehensweise können einzelne Regelkreis-Instanzen mit Erwei-
terungen zur Kompensation von messbaren Störungen („lead-lag feedforward“) oder zur
Kompensation von Totzeiten (Smith-Prädiktor) erweitert werden. Die Vorlagen dazu finden
sich bei den entsprechenden Simulations-Templates.
Es ist für den Anwender sogar möglich, in einer projektspezifischen Bibliothek eigene Mess-
stellentypen zu definieren, falls er beispielsweise viele gleichartige Regelkreise mit Smith-
Prädiktor erzeugen will.
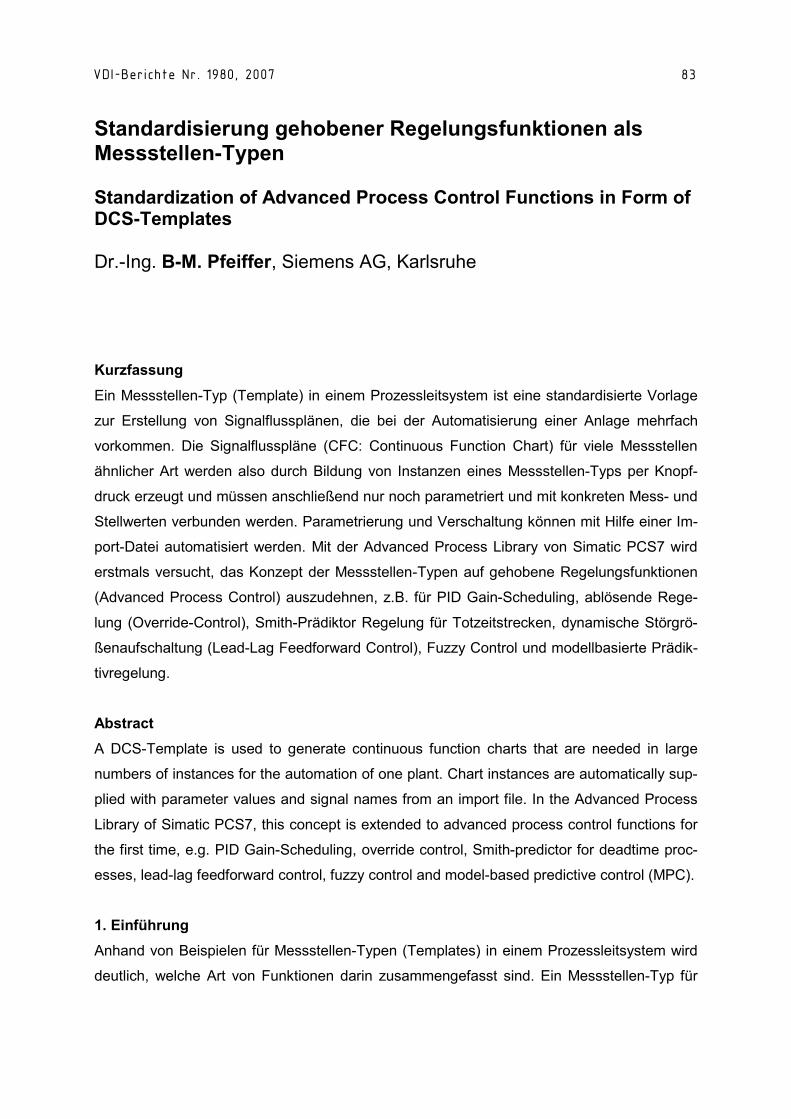
VDI-Berichte Nr. 1980, 2007 87
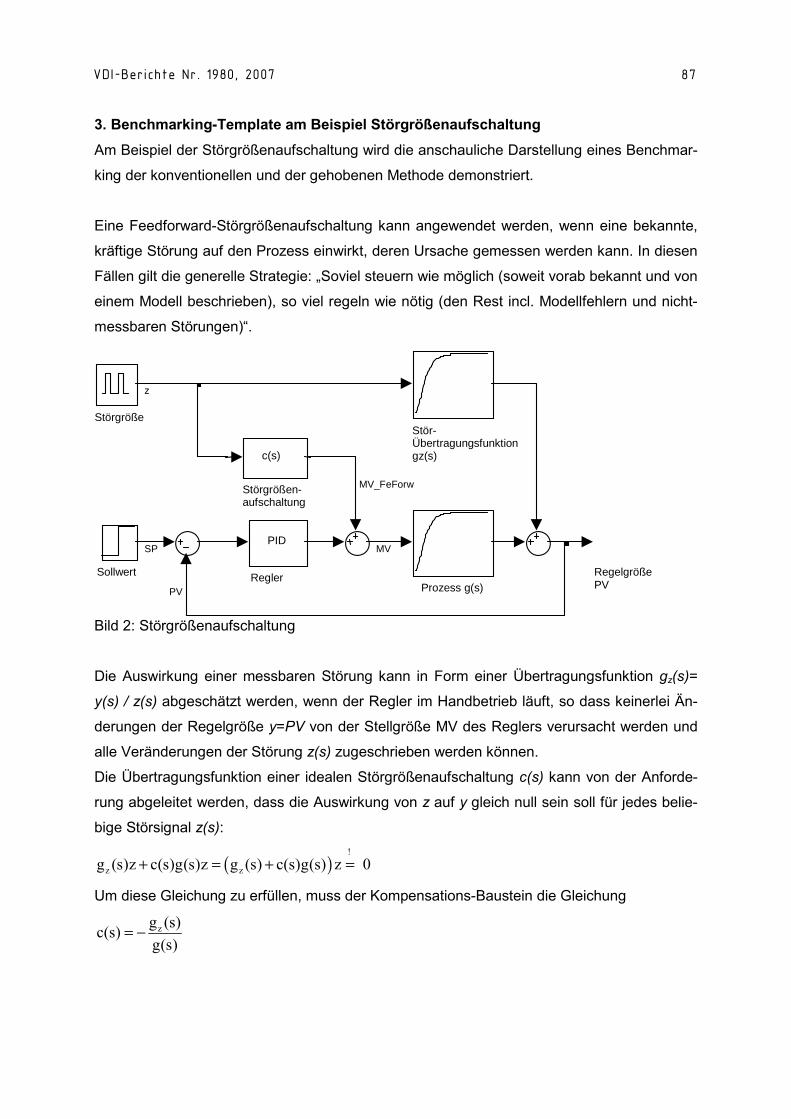
3. Benchmarking-Template am Beispiel Störgrößenaufschaltung
Am Beispiel der Störgrößenaufschaltung wird die anschauliche Darstellung eines Benchmar-
king der konventionellen und der gehobenen Methode demonstriert.
Eine Feedforward-Störgrößenaufschaltung kann angewendet werden, wenn eine bekannte,
kräftige Störung auf den Prozess einwirkt, deren Ursache gemessen werden kann. In diesen
Fällen gilt die generelle Strategie: „Soviel steuern wie möglich (soweit vorab bekannt und von
einem Modell beschrieben), so viel regeln wie nötig (den Rest incl. Modellfehlern und nicht-
messbaren Störungen)“.
Störgröße c(s)
Störgrößen-aufschaltung
Stör-Übertragungsfunktiongz(s)
Prozess g(s)Sollwert Regelgröße
PV
PID Regler
MV
PV
SP
MV_FeForw
z
Bild 2: Störgrößenaufschaltung
Die Auswirkung einer messbaren Störung kann in Form einer Übertragungsfunktion gz(s)=
y(s) / z(s) abgeschätzt werden, wenn der Regler im Handbetrieb läuft, so dass keinerlei Än-
derungen der Regelgröße y=PV von der Stellgröße MV des Reglers verursacht werden und
alle Veränderungen der Störung z(s) zugeschrieben werden können.
Die Übertragungsfunktion einer idealen Störgrößenaufschaltung c(s) kann von der Anforde-
rung abgeleitet werden, dass die Auswirkung von z auf y gleich null sein soll für jedes belie-
bige Störsignal z(s):
( )!
z zg (s)z c(s)g(s)z g (s) c(s)g(s) z 0+ = + =
Um diese Gleichung zu erfüllen, muss der Kompensations-Baustein die Gleichung
zg (s)c(s)g(s)
= −
VDI-Berichte Nr. 1980, 2007 88
so gut wie möglich approximieren. Dafür muss die Störübertragungsfunktion gz(s)=y(s)/z(s)
bekannt sein und die Übertragungsfunktion der Hauptstrecke g(s)= y(s)/u(s), u=MV invertiert
werden. Falls beide als Übertragungsfunktionen erster Ordnung mit Totzeit modelliert wer-
den
θsS est
ksg −
+=
11)( und zs
z
zSz e
stk
sg θ−
+=
11)(
und zθθ < gilt, muss das resultierende Kompensationsglied daher exakt die Übertragungs-
funktion
zS z s ( )1
S 1 z
k 1 t sc(s) ek 1 t s
− θ − θ+= −+
darstellen.
z(s) MV_FeForw
PT1
DT1
Tt P
Bild 3: Template für Lead-Lag-Glied
Die Lead-Lag-Übertragungsfunktion kann außerhalb des Reglers mit einer Kombination ele-
mentarer CFC-Bausteine gemäß Bild 3 als Parallelschaltung eines Differenzierers mit Ver-
zögerung und eines Verzögerungsglieds erster Ordnung (mit derselben Nenner-
Zeitkonstante und Verstärkung 1) erstellt werden. Dahinter werden noch ein Totzeitblock
sowie ein Verstärkungsfaktor in Reihe geschaltet.
VDI-Berichte Nr. 1980, 2007 89
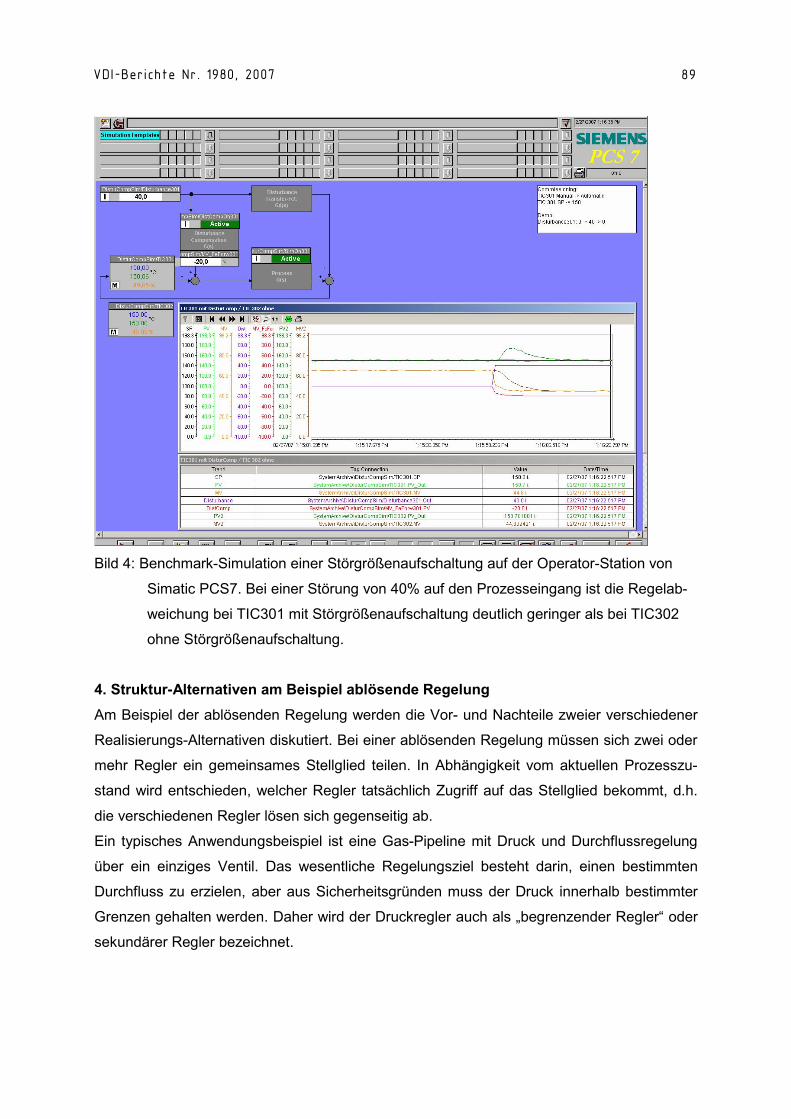
Bild 4: Benchmark-Simulation einer Störgrößenaufschaltung auf der Operator-Station von
Simatic PCS7. Bei einer Störung von 40% auf den Prozesseingang ist die Regelab-
weichung bei TIC301 mit Störgrößenaufschaltung deutlich geringer als bei TIC302
ohne Störgrößenaufschaltung.
4. Struktur-Alternativen am Beispiel ablösende Regelung Am Beispiel der ablösenden Regelung werden die Vor- und Nachteile zweier verschiedener
Realisierungs-Alternativen diskutiert. Bei einer ablösenden Regelung müssen sich zwei oder
mehr Regler ein gemeinsames Stellglied teilen. In Abhängigkeit vom aktuellen Prozesszu-
stand wird entschieden, welcher Regler tatsächlich Zugriff auf das Stellglied bekommt, d.h.
die verschiedenen Regler lösen sich gegenseitig ab.
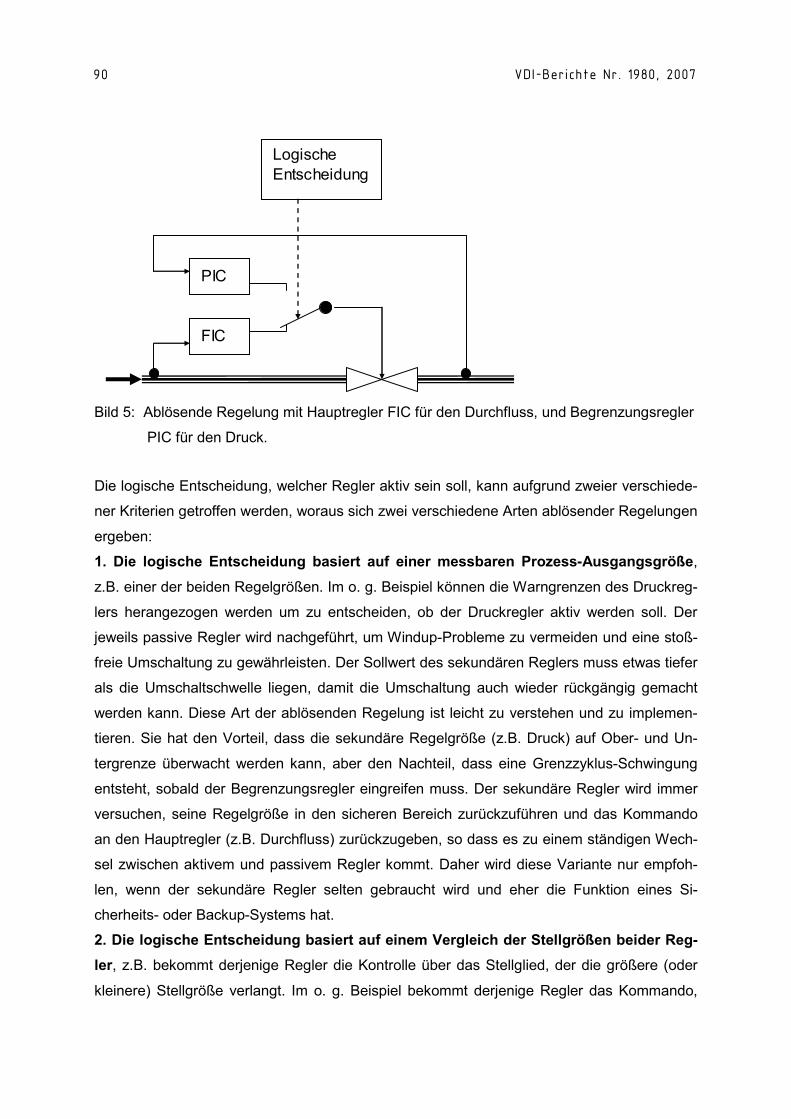
Ein typisches Anwendungsbeispiel ist eine Gas-Pipeline mit Druck und Durchflussregelung
über ein einziges Ventil. Das wesentliche Regelungsziel besteht darin, einen bestimmten
Durchfluss zu erzielen, aber aus Sicherheitsgründen muss der Druck innerhalb bestimmter
Grenzen gehalten werden. Daher wird der Druckregler auch als „begrenzender Regler“ oder
sekundärer Regler bezeichnet.
VDI-Berichte Nr. 1980, 2007 90
PIC
FIC
Logische Entscheidung
Bild 5: Ablösende Regelung mit Hauptregler FIC für den Durchfluss, und Begrenzungsregler
PIC für den Druck.
Die logische Entscheidung, welcher Regler aktiv sein soll, kann aufgrund zweier verschiede-
ner Kriterien getroffen werden, woraus sich zwei verschiedene Arten ablösender Regelungen
ergeben:
1. Die logische Entscheidung basiert auf einer messbaren Prozess-Ausgangsgröße,
z.B. einer der beiden Regelgrößen. Im o. g. Beispiel können die Warngrenzen des Druckreg-
lers herangezogen werden um zu entscheiden, ob der Druckregler aktiv werden soll. Der
jeweils passive Regler wird nachgeführt, um Windup-Probleme zu vermeiden und eine stoß-
freie Umschaltung zu gewährleisten. Der Sollwert des sekundären Reglers muss etwas tiefer
als die Umschaltschwelle liegen, damit die Umschaltung auch wieder rückgängig gemacht
werden kann. Diese Art der ablösenden Regelung ist leicht zu verstehen und zu implemen-
tieren. Sie hat den Vorteil, dass die sekundäre Regelgröße (z.B. Druck) auf Ober- und Un-
tergrenze überwacht werden kann, aber den Nachteil, dass eine Grenzzyklus-Schwingung
entsteht, sobald der Begrenzungsregler eingreifen muss. Der sekundäre Regler wird immer
versuchen, seine Regelgröße in den sicheren Bereich zurückzuführen und das Kommando
an den Hauptregler (z.B. Durchfluss) zurückzugeben, so dass es zu einem ständigen Wech-
sel zwischen aktivem und passivem Regler kommt. Daher wird diese Variante nur empfoh-
len, wenn der sekundäre Regler selten gebraucht wird und eher die Funktion eines Si-
cherheits- oder Backup-Systems hat.
2. Die logische Entscheidung basiert auf einem Vergleich der Stellgrößen beider Reg-ler, z.B. bekommt derjenige Regler die Kontrolle über das Stellglied, der die größere (oder
kleinere) Stellgröße verlangt. Im o. g. Beispiel bekommt derjenige Regler das Kommando,
VDI-Berichte Nr. 1980, 2007 91
der das Ventil weiter öffnen möchte. Der Sollwert des sekundären Reglers definiert die
Schaltschwelle. Beide Regler laufen die ganze Zeit in Automatik. Um Windup-Probleme zu
vermeiden, müssen die Stellgrößenbegrenzungen in einer Überkreuz-Struktur nachgeführt
werden: Wenn die größere (kleinere) Stellgröße gewinnt, müssen die Unter- (Ober-)grenzen
aller Regler der aktuellen größten (kleinsten) Stellgröße in einem geringen Abstand z.B. 2%
des Stellbereichs unterhalb (oberhalb) nachgeführt werden. Dadurch kann dieses Schema
auch auf Anwendungen mit mehr als zwei Regelgrößen angewendet werden. Es gibt keine
Windup-Probleme an der Obergrenze, da die größte Stellgröße ohnehin das Kommando
übernimmt. Dieser Ansatz vermeidet die Grenzzyklus-Schwingung von Alternative 1, aber er
ist prinzipiell asymmetrisch, d.h. es kann entweder eine Ober- oder eine Untergrenze der
sekundären Regelgröße überwacht werden, nicht beides gleichzeitig. Diese Art der ablösen-
den Regelung wird in den meisten regelungstechnischen Lehrbüchern beschrieben, v.a. in
den USA, aber sie kann nur angewendet werden im Zusammenhang mit PID-Algorithmen,
die eine Online-Manipulation der Stellgrößenbegrenzungen erlauben (bei PCS7 ab V6.0).
5. Mehrgrößenregelung mit einem systemintegrierten schlanken Prädiktivregler Am Beispiel der modellbasierten Prädiktivregelung wird der Umgang mit einem schlanken,
nahtlos in das Prozessleitsystem eingebetteten MPC gezeigt. Sehr viele Anwendungen, bei
denen bisher der Einsatz eines Prädiktivreglers aus Kostengründen nicht in Erwägung gezo-
gen wurde, werden durch die Existenz eines Standard-MPC-Funktionsbausteins für eine
Mehrgrößenregelung zugänglich.
Beispiele:
• Temperaturregelung an Zweistoff-Destillationskolonnen. Da sich mit konventionellen
Mitteln nur entweder die Temperatur am Kopf oder am Sumpf der Kolonne regeln
lässt, gibt es viele verschiedene Varianten zur Regelung von Kolonnen über eine ein-
zige Temperatur. Durch den routinemäßigen Einsatz eines 2x2-MPC können alle Ko-
lonnen mit derselben standardisierten Automatisierungsstruktur ausgestattet werden:
Regelung von Kopf- und Sumpftemperatur über Rücklaufverhältnis und Heizdampf-
menge. Über Priorisierungen im Gütekriterium des Prädiktivreglers kann der Anwen-
der im Einzelfall vorgeben, welche Regelgröße ihm besonders wichtig ist.
• Regelung von Polymerisationsreaktoren: Regelgrößen Produkt-Viskosität (hochprior,
da qualitätsrelevant) und Füllstand (Regelzone, niederprior), Stellgrößen Reaktor-
Druck und Produkt-Abfluss.
VDI-Berichte Nr. 1980, 2007 92
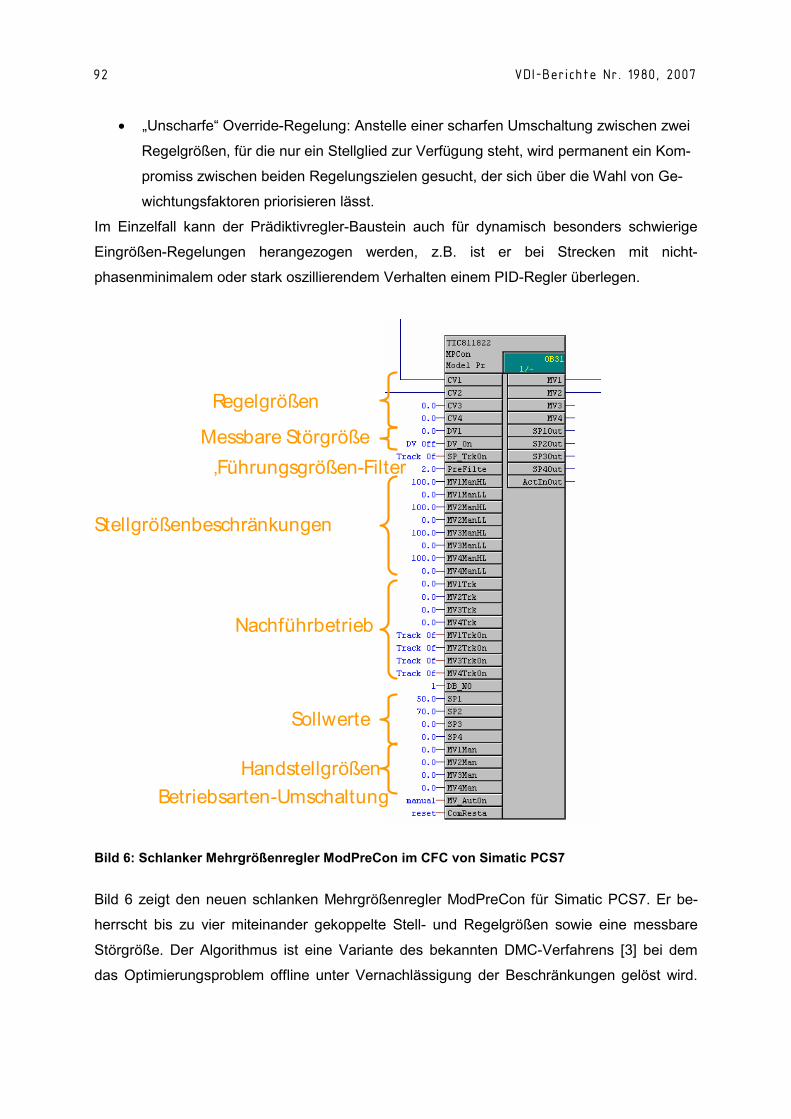
• „Unscharfe“ Override-Regelung: Anstelle einer scharfen Umschaltung zwischen zwei
Regelgrößen, für die nur ein Stellglied zur Verfügung steht, wird permanent ein Kom-
promiss zwischen beiden Regelungszielen gesucht, der sich über die Wahl von Ge-
wichtungsfaktoren priorisieren lässt.
Im Einzelfall kann der Prädiktivregler-Baustein auch für dynamisch besonders schwierige
Eingrößen-Regelungen herangezogen werden, z.B. ist er bei Strecken mit nicht-
phasenminimalem oder stark oszillierendem Verhalten einem PID-Regler überlegen.
Regelgrößen
Stellgrößenbeschränkungen
Nachführbetrieb
Sollwerte
Handstellgrößen
Messbare Störgröße‚Führungsgrößen-Filter
Betriebsarten-Umschaltung
Bild 6: Schlanker Mehrgrößenregler ModPreCon im CFC von Simatic PCS7
Bild 6 zeigt den neuen schlanken Mehrgrößenregler ModPreCon für Simatic PCS7. Er be-
herrscht bis zu vier miteinander gekoppelte Stell- und Regelgrößen sowie eine messbare
Störgröße. Der Algorithmus ist eine Variante des bekannten DMC-Verfahrens [3] bei dem
das Optimierungsproblem offline unter Vernachlässigung der Beschränkungen gelöst wird.
VDI-Berichte Nr. 1980, 2007 93
Der Funktionsbaustein selbst enthält die analytische Lösung des Optimierungsproblems.
Stellgrößenbegrenzungen (sowohl absolut als auch bezüglich der Gradienten) werden als
„hard constraints“ im Online-Algorithmus behandelt. Exakte Sollwerte oder Zielzonen für die
Regelgrößen werden als „soft constraints“ des Optimierungsproblems betrachtet. Neben in-
dividuell pro Regelkanal gewichteten zukünftigen Regelabweichungen werden auch zukünf-
tige Stellgrößenbewegungen mit kanalspezifischen Gewichten im Gütekriterium berücksich-
tigt, womit die Aggressivität des Regelverhaltens wie bei einem Zustandsregler angepasst
werden kann. Über einen Führungsgrößenfilter für zukünftige Sollwertverläufe lässt sich das
Führungsverhalten unabhängig vom Störverhalten gestalten (Regelstruktur mit 2 Freiheits-
graden, engl. 2 „DoF control“), und sogar online feinjustieren.
Handhabung, Bedienung und Betriebsarten sind soweit wie möglich an den konventionellen
PID-Regler angelehnt, so dass auch weniger erfahrene Benutzer leicht damit zu Recht
kommen. Konfiguration und Inbetriebnahme können mit Hilfe eines dazu passenden Engi-
neering-Tools ohne regelungstechnische Spezialkenntnisse durchgeführt werden. Dazu wer-
den alle Eingangsgrößen des Prozesses dynamisch angeregt und die Messdaten mit dem
CFC-Trendkurvenschreiber aufgezeichnet. Das Konfigurationstool identifiziert daraus ein
mathematisches Prozessmodell und entwirft den prädiktiven Regler. Für jede der maximal
16+4 Teil-Übertragungsfunktionen wird dabei ein Modell vierter Ordnung mit Totzeit ge-
schätzt. Das Tool verwendet in gekapselter Form Algorithmen aus der Matlab System Identi-
fication Toolbox, erfordert aber keine Matlab-Lizenz und keine Matlab-Kenntnisse beim An-
wender.
Mehrere ModPreCon-Blöcke können kaskadiert oder über Störgrößenaufschaltungen mitein-
ander koordiniert werden, um auch Mehrgrößenprobleme mit mehr als vier Stell- und Regel-
größen zu lösen. Ebenso kann der ModPreCon-Baustein mit nachgelagerten Split-Range-
Bausteinen kombiniert werden, um beispielsweise Heiz- und Kühlstellgrößen anzusprechen.
Der Regelalgorithmus selbst basiert auf einem linearen, zeitinvarianten Prozessmodell. Bei
nichtlinearen Strecken kann er mit vor- oder nachgelagerten Polygonzügen zur Linearisie-
rung kombiniert werden. Außerdem kann er entsprechend dem in [4] beschriebenen Schema
entlang von Trajektorien geführt werden. Durch diese geschickte Kombination von (ggf.
nichtlinearer) Feedforward-Steuerung und Feedback-Regelung kleiner Abweichungen von
der Trajektorie werden auch Arbeitspunktwechsel an nichtlinearen Strecken beherrschbar.
6. Zusammenfassung Der Engineering-Aufwand bei der Projektierung von Regelkreisen wird signifikant reduziert
indem zahlreiche, strukturell gleichartige Instanzen von einer Musterlösung bzw. einem
VDI-Berichte Nr. 1980, 2007 94
Messstellentyp abgeleitet werden. Im Rahmen der Musterlösungen kann Erfahrungswissen
des Systemlieferanten an Kunden weitergegeben, und typische Fehler vermieden werden.
Mit der Advanced Process Library von Simatic PCS7 werden erstmals Musterlösungen für
gehobene Regelungsfunktionen (Advanced Process Control) in den serienmäßigen Liefer-
umfang der Bibliothek aufgenommen, z.B. für PID Gain-Scheduling, ablösende Regelung,
Smith-Prädiktor Regelung, dynamische Störgrößenaufschaltung und modellbasierte Prädik-
tivregelung. Durch den geringeren Einstandspreis einer systemintegrierten und musterlö-
sungsbasierten Implementierung werden zahlreiche Applikationen auch an kleinen und mitt-
leren Anlagen für Advanced-Control-Verfahren zugänglich, bei denen es aufgrund der Amor-
tisationszeiten nicht in Frage kommt, kostspielige APC-Softwarepakete von außen an das
Prozessleitsystem anzukoppeln.
Literatur [1] Dittmar, R., Pfeiffer, B-M.: Modellbasierte prädiktive Regelung in der industriellen
Praxis. at 12/2006.
[2] Dittmar, R., Pfeiffer, B-M.: Modellbasierte prädiktive Regelung - Eine Einführung für
Ingenieure. Oldenbourg Verlag, München, 2004.
[3] Cutler, C.R., Ramaker, B.L.: Dynamic matrix control – a computer control algorithm.
Proc. Joint American Control Conference, 1980, Paper WP5-B.
[4] Pfeiffer, B-M., Schneider, M.: Flachheitsbasierte Steuerstrategien für Batch-








![Breitingen Legende - tlubn.thueringen.de · Messstellen des GWL6 nach Datenerhebung LEG LMBV MIBRAG ThLG Wismut Digitalisiert (Beilage 24) Altlasten [TLUG - 11/01] Bericht 2007 Reyer](https://static.unterlagen.site/doc/80x56/5f6cf9fb454b101314456e0e/breitingen-legende-tlubn-messstellen-des-gwl6-nach-datenerhebung-leg-lmbv-mibrag.jpg)










