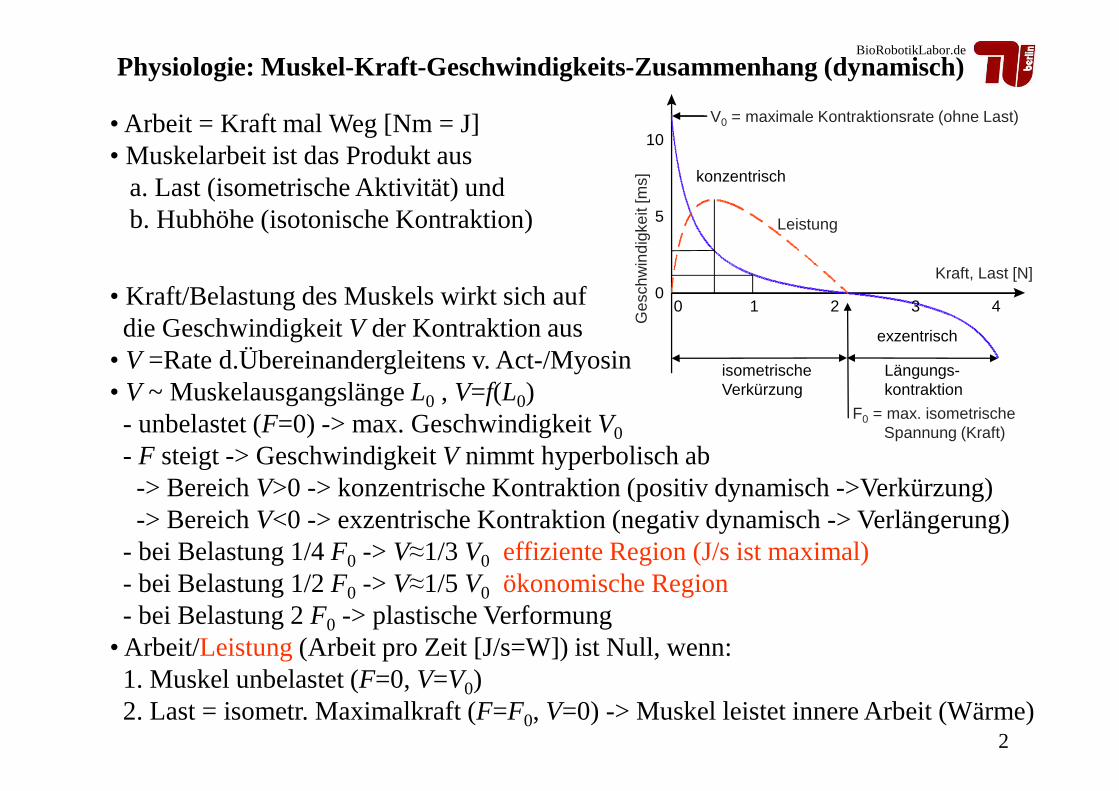
• Kraft/Belastung des Muskels wirkt sich auf die Geschwindigkeit V der Kontraktion aus
• V =Rate d.Übereinandergleitens v. Act-/Myosin• V ~ Muskelausgangslänge L0 , V=f(L0)- unbelastet (F=0) -> max. Geschwindigkeit V0
- F steigt -> Geschwindigkeit V nimmt hyperbolisch ab-> Bereich V>0 -> konzentrische Kontraktion (positiv dynamisch ->Verkürzung)-> Bereich V<0 -> exzentrische Kontraktion (negativ dynamisch -> Verlängerung)
- bei Belastung 1/4 F0 -> V≈1/3 V0 effiziente Region (J/s ist maximal)- bei Belastung 1/2 F0 -> V≈1/5 V0 ökonomische Region- bei Belastung 2 F0 -> plastische Verformung
• Arbeit/Leistung(Arbeit pro Zeit [J/s=W]) ist Null, wenn:1. Muskel unbelastet (F=0, V=V0)2. Last = isometr. Maximalkraft (F=F0, V=0) -> Muskel leistet innere Arbeit (Wärme)
Kraft, Last [N]
F0 = max. isometrischeSpannung (Kraft)
V0 = maximale Kontraktionsrate (ohne Last)
Leistung
0 1 2 3 4
10
5
0
Ges
chw
indi
gkei
t [m
s]
isometrischeVerkürzung
Längungs-kontraktion
exzentrisch
konzentrisch
• Arbeit = Kraft mal Weg [Nm = J]• Muskelarbeit ist das Produkt aus
a. Last (isometrische Aktivität) undb. Hubhöhe (isotonische Kontraktion)
BioRobotikLabor.de
3
Physiologie: Hauptsensortypen – Abstraktion
Golgi-Sehnenorgan, aus Grays Anatomie, 1918
• Funktion der GA: - bei Erhöhung der Muskelspannung -> Anspannung der Sehne-> Nervenfaserenden in der Sehne komprimieren-> Aktionspotential wird ausgelöst -> über Nervenfasern ins Rückenmark/Vorderhorn
• Golgi-Sehnenorgane (GA):- Sinnesorgan der Tiefensensibilität- zur Messung/Regelung Muskelspannung/-Kraft [N]- am Übergang zwischen Muskel und Sehne- zuständig für die Wahrnehmung von Körper-bewegungen/-lage im Raum bzw. Lage/Stellung einzelner Körperteile zueinander= Propriozeption (lat. proprius ‚eigen‘ , recipere ‚aufnehmen‘)
BioRobotikLabor.de
4
Physiologie: Hauptsensortypen – Abstraktion
kontrahierbar,(Gamma-Faser)
dehnbar,(sensible 1a Faser)
kontrahierbar,(Gamma-Faser)• Aufbau:
- 5 bis 10 Muskelfasern mit Länge 1 bis 3mm- je mehr Muskelspindeln, desto feiner könnendie Bewegungen abgestimmt werden
- Beinstrecker (Oberschenkel) hat 500 bis 1000 Muskelspindeln, die bis zu 10mm lang sind
• Allgemeine Kennzeichnung der Signalrichtung1. Efferent (lat. effere ‚hinaustragen, hinausführen‘)
- neurophysiologisch die Nervenzellen, die aus einem bestimmten Bereich Signale fort- bzw. wegleiten
2. Afferent (lat. affere ‚hintragen, zuführen‘)- die Nervenzellen denen aus einem bestimmten Bereich Signale zufließen
• Muskelspindel (SpA):- Sinnesorgan in den Muskeln- zur Messung des Dehnungszustandes der Skelett-muskulatur: Länge [m], Geschwindigkeit [m/s]
- PD-Sensoren (Prop.- und Differentialeigenschaft)- Schützen Muskel auch vor Überdehnung~ bei plötzlicher Dehnung lösen sie den s.g.
Dehnungsreflexaus (z.B. Patellasehnenreflex)
BioRobotikLabor.de
5
Physiologie: Regelkreis – Abstraktion
• α- und γ-Motoneurone sind mit motorischenZentren des Gehirns verbunden
• Signalweg:- vom Zentralnervensystem, ZNS - über α- und γ-Motoneurone, α/γ-MN- zu den kontraktilen Elemente
~ Muskelfaser, M~ Enden der Muskelspindel, MS
• Steuerung:-> Muskelkontraktionen können gesteuert werden:
-> bei komplexen Bewegungsabläufen (z.B. Gehen) ändert das Gehirn die Sollwerte für verschiedeneMuskelgruppen entsprechend dem Bewegungs-Programm
kontrahierbar,(Gamma-Faser)
dehnbar,(sensible 1a Faser)
kontrahierbar,(Gamma-Faser)
BioRobotikLabor.de
6
Physiologie: Regelkreis – Abstraktion
• Muskelspindeln sind die zentralen Elemente eines komplexen Steuer- und Regelsystems
• Bedeutungen:1. Schutz vor Überdehnung des Muskels durch
den Dehnungsreflex2. Einstellung und Aufrechterhaltung einer
konstanten Muskelspannung (Tonus)3. -> Aufrechterhaltung einer bestimmten Gelenk-
und Körperstellung: Längenkontrollsystem4. Feindosierung von Bewegungen durch Zu-/Ab-
schalten von Muskelfasern (Servomechanismus):Empfindlichkeitsregulierung
kontrahierbar,(Gamma-Faser)
dehnbar,(sensible 1a Faser)
kontrahierbar,(Gamma-Faser)
BioRobotikLabor.de
7
Physiologie: Regelkreis – Abstraktion
Regelschleife:1. Sollwertgeber für die Muskellänge LM sind die
motorischen Zentren des Gehirns (=Führungsgöße)2. Sollwert wird als Aktivität der γ-Fasern an das
Regelglied Muskelspindel MSp weitergegeben3. Vergleich von Ist- (LMS) u. Sollwert (LM) geschieht
im Faserabschnitt der MSp (=Messglied)- Mitte der MSp ist gedehnt: Istwert < Sollwert
4. Dehnung wird in Aktivität der Ia-Nervenfaserncodiert und vom ZNS als Stellwert über die α-MNan die Muskelfasern (rück)übertragen
5. Die auf eine α-MN Aktivität ausgelöste Muskel-kontraktion wirkt als Stellgröße so lange, bis MSpsoweit verkürzt ist, dass Fasermitte ungedehnt ist
• Störgröße ist jede Dehnung des Muskels:- Lageveränderung des Körpers,- Schlag auf die Sehne oder - Kontraktion des Antagonisten
dehnbar,(sensible 1a Faser)
kontrahierbar,(Gamma-Faser)
BioRobotikLabor.de
8
Physiologie: Dehnungsreflex – Abstraktion
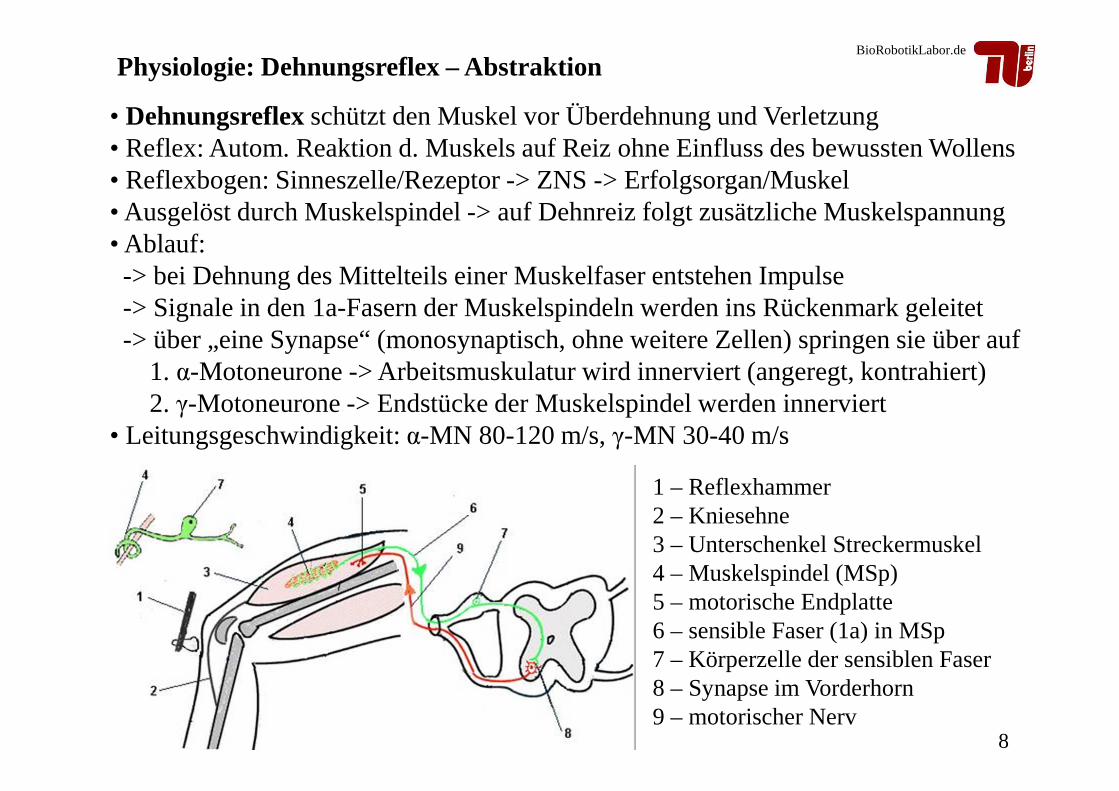
• Dehnungsreflexschützt den Muskel vor Überdehnung und Verletzung• Reflex: Autom. Reaktion d. Muskels auf Reiz ohne Einfluss des bewussten Wollens• Reflexbogen: Sinneszelle/Rezeptor -> ZNS -> Erfolgsorgan/Muskel• Ausgelöst durch Muskelspindel -> auf Dehnreiz folgt zusätzliche Muskelspannung• Ablauf:-> bei Dehnung des Mittelteils einer Muskelfaser entstehen Impulse-> Signale in den 1a-Fasern der Muskelspindeln werden ins Rückenmark geleitet-> über „eine Synapse“ (monosynaptisch, ohne weitere Zellen) springen sie über auf
1. α-Motoneurone -> Arbeitsmuskulatur wird innerviert (angeregt, kontrahiert)2. γ-Motoneurone -> Endstücke der Muskelspindel werden innerviert
• Leitungsgeschwindigkeit: α-MN 80-120 m/s, γ-MN 30-40 m/s
1 – Reflexhammer2 – Kniesehne3 – Unterschenkel Streckermuskel4 – Muskelspindel (MSp)5 – motorische Endplatte6 – sensible Faser (1a) in MSp7 – Körperzelle der sensiblen Faser8 – Synapse im Vorderhorn9 – motorischer Nerv
BioRobotikLabor.de
9
Physiologie: γ-Spindelschleife – Abstraktion
• Längenkontrollsystem= Muskellänge über γ-Spindelschleife steuerbar- Aktivierung der γ-Motoneurone durch ZNS:-> Enden der MSp-fasern kontrahieren-> Mitte der MSp wird gedehnt-> Ia-Fasern der MSp erzeugen Aktionspotential-> werden ins Hinterhorn des Rückenmarks geleitet -> auf α-Motoneurone übertragen-> Skelettmuskelfasern M kontrahieren-> Muskelspindel (auch Mittelteil) entspannt sich… solange, bis Ia-Faser keine Dehnung wahrnimmt
kontrahierbar,(Gamma-Faser)
dehnbar,(sensible 1a Faser)
kontrahierbar,(Gamma-Faser)
• Empfindlichkeitsregulierung= Einstellung/Verstimmung der Muskelspindel- erfolgt unbewusst vom ZNS über γ-Motoneuronedes efferenten Systems in Zusammenarbeit mit dem afferenten Teil der Muskelspindel
- MSp ist einziger Rezeptor im Körper, der efferent versorgt wird (Regelkreis)- alle anderen Rezeptoren (z.B. GA) werden nur afferent versorgt
EEEE
EEEE
BioRobotikLabor.de
10
Physiologie: Regelkreise (Bionik: Abstraktion und Übertragung in die Technik)
kontrahierbar,(Gamma-Faser)
dehnbar,(sensible 1a Faser)
kontrahierbar,(Gamma-Faser)
Vier Regelkreiseim Muskel-Sehnen-Komplex:1. Statische MSp stabilisieren die Muskel-
Vorspannung durch Spannungsreflex=> ähnlich Sollwert-Regelung => z.B.: statische Lastverteilung
2. Kontraktion zieht MSp auseinander-> diese reagiert mit Dehnungsreflex=> ähnlich Folge-Regelung=> z.B.: Trajektorienverfolgung
3. Koaktivierung von Ago- und Antagonist erhöht den Tonus und so die Steifigkeit des Gelenkes=> ähnlich Steifigkeits-/Nachgiebigkeits-Regelung=> z.B.: Kraft-/Drehmoment Trajektorie
4. Muskelvorspannung führt zum Tunen der Kraftstärke der anschließenden Aktion=> ähnlich Vorspannungs-Regelung => z.B.: gepulste Trajektorie
BioRobotikLabor.de
11
Physiologie: Messtechnik(Bionik: Abstraktion und Übertragung in die Technik)• Muskelspindel (MSp) misst über Ia-Faser
- Dehnung ∆l/L0 und - Geschwindigkeit 1/L0·d∆l/dt
• Golgi-Sehnenorgan (GA) misst über Ib-Faser- Spannung F/A und - Rück m/A·da/dt
(Zug-/Druck-)Kraft F = m·a [N=kg·m/s2]• bei Dehnung metallischer Körper im elastischen Bereich gilt: F = k·∆l mit- k [N/m] Federkonstante und ∆l [m] Dehnungsweg- wichtig bei der Mensch-Technik-Interaktion: m·a = k·∆l
• Federkonstante k einer Muskelfaser ist abhängig von (k ≠ konstant):1. mechanische Eigenschaften: k ~ ∆l2. biologische Eigenschaften: k ~ elektrische Reizstärke Eel=U·I·∆t-> k = f(∆l, Eel)- willkürliche Reizstärke des ZNS -> keine gesetzmäßige Kraft-Dehnungs-Funktion- bei max. Spannung durch max. Reizenergie (Tetanus): k = f(∆l, Eel=Eel
max)
Kontraktionsgeschwindigkeit v [m/s]• v = f(vQuerbrücken) bzw. Freisetzung von ADP und Pi vom Myosinkopf
Mechanische Spannung, Belastung, Dehnungsspannung, stressσ (sigma) [N/m2]• interne Reaktion auf eine Deformation gegen den inneren Widerstand im Material,verursacht durch eine von außen angreifende Kraft
• Spannung als normalisierte Kraft dient zur Unterscheidung der Größe und nichtder Qualität von Materialien
• kann nicht direkt gemessen werden, sondern wird über eingebrachte Kraft ermittelt
Elastische Verformung bzw. Dehnung, strain ε (epsilon) [-]• Betrag der Deformation ∆l = (L-L0) bzw. auch (L-L0)/L oder L/L0
• Längenänderung folgt im elastischen Bereich dem Hooke‘schen Gesetz
Elastizitätsmodul, E-Modul, young‘s moduleE [N/m2]• Muskeln ≈ Gummibänder: ε↑ → σ↑• materialabhängige Konstante• Zusammenhang zw. Formänderung ε und der auf einer Fläche wirkenden Kraft σ
• gilt nur bei elastischer Deformation, reversibel, linear, Hooke‘sche Gerade
Elastizitätsmodul, E-Modul, young‘s moduleE [N/m2]• Fläche = physiologische Querschnitt (PCSA), = Schnittfläche aller betrachteten Muskeln
• geringste Dehnung bei Emax und σmax -> Dehnung εmin = 14% • größte Spannung bei Emin und εmax ->Spannung σmax = 170%
Steifigkeit, stiffness [N/mm2, N/mm, N …]• Fähigkeit eines Materials sich seiner Deformation zu widersetzen• Steifigkeiten bestehen immer aus Werkstoff- (E-Modul) und Geometriekomponente• Verschiedene relative Steifigkeiten:- Dehnsteifigkeit eines Muskels: EMuskel·APCSA~ FN/εlängs[N]- Biegesteifigkeit eines Knochens: EKnochen·I [N·mm2] (I–Flächenträgkeitsmoment)- Federsteifigkeit: k = F/∆l = E·A/L bei einheitlichem Querschnitt [N/mm]
• Muskelfaser sind im Prinzip einstellbare Federn, Steifigkeit ~ Aktivierungslevel• Nachgiebigkeit = 1/Steifigkeit [mm/N]
BioRobotikLabor.de
15
Stand der Technik robotischer Aktoren
Wilkie, 1976
Flu
idis
ch
e M
uskeln
(1
00
0 W
/kg
)
FerRobotics GmbH
Fluidische Muskeln, fluidic muscle:• ähnliches statische, dynamische Eigenschaften/Verhalten wie natürliche Muskeln• hohe gewichtsbezogene Leistung(leicht, kraftvoll), bis zu 300 (E-Motor bis zu 50)• kein stick-slip, keine Haltekräfte, hermetisch dicht, Reinraum geeignet, wartungsarm• inhärent/passiv nachgiebig, elastischfür Stoßeinwirkung (Kollision vs. Kontakt)• einstellbar/aktiv nachgiebig für Bewegung, sichere Mensch-Technik-Interaktion• Herausforderungen: Nachgiebigkeit, Druckluftversorgung, n.l. Beschreibungs-
funktion (Membran, Fluid), relativ neu am Markt, kaum Literatur bzw. Lehrbücher