31
Bedienungsanleitung V2.4.3 23.04.2018 MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 1 von 31 MPO – 700
| Date post: | 21-Jun-2019 |
| Category: |
Documents |
| Upload: | doankhuong |
| View: | 217 times |
| Download: | 0 times |

Bedienungsanleitung
V2.4.3
23.04.2018
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 1 von 31
MPO – 700
Inhalt
1 Einleitung..........................................................................................................31.1 Allgemeine Informationen.......................................................................................31.2 Anwendungsgebiete...............................................................................................31.3 Zu diesem Dokument.............................................................................................3
2 Hinweise zum Betrieb.......................................................................................42.1 Produktbeschreibung.............................................................................................42.2 Bestimmungsgemäße Verwendung........................................................................42.3 Vom Kunden zu erbringende Arbeiten....................................................................42.4 Unzulässige Verwendung.......................................................................................52.5 Einsatzumgebung...................................................................................................52.6 Sachkundiges Personal..........................................................................................6
3 Sicherheitshinweise..........................................................................................73.1 Einweisung.............................................................................................................73.2 Sicherheitssystem..................................................................................................73.3 Aufenthalt im Gefahrenbereich...............................................................................83.4 Gefahrenstellen......................................................................................................93.5 Inbetriebnahme......................................................................................................93.6 Veränderungen am System....................................................................................93.7 Zu erwartende Fehlbedienung..............................................................................10
4 Transport.........................................................................................................124.1 Verpackung..........................................................................................................124.2 Langstrecken........................................................................................................134.3 Kurze und kürzeste Strecken...............................................................................13
5 Installation.......................................................................................................145.1 Ladegerät.............................................................................................................145.2 Automatische Ladestation....................................................................................14
6 Inbetriebnahme...............................................................................................166.1 Bedienelemente...................................................................................................166.2 Vorbereitungen.....................................................................................................176.3 Einschalten und Testen........................................................................................176.4 Sicherheitssystem................................................................................................18
7 Komponenten-Diagramm................................................................................20
8 Technische Daten...........................................................................................218.1 Mechanische Eigenschaften.................................................................................218.2 Elektrische Kennwerte und sonstige Daten..........................................................228.3 Kommunikation mit internen Komponenten..........................................................238.4 Verwendete Stecker.............................................................................................24
9 Das LC-Display...............................................................................................259.1 Hauptansicht........................................................................................................259.2 Info-Ansicht..........................................................................................................26
10 Wartung........................................................................................................2710.1 Allgemeine Wartungshinweise............................................................................2710.2 Fahr-Dreh-Module..............................................................................................2710.3 Sicherungen.......................................................................................................2810.4 Batteriewechsel..................................................................................................2810.5 Laden der Batterie..............................................................................................28
11 Entsorgung....................................................................................................3011.1 Demontage.........................................................................................................3011.2 Recycling............................................................................................................30
12 Rechtliche Anmerkungen..............................................................................31
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 2 von 31
1 Einleitung
1.1 Allgemeine Informationen
Mobile Roboterplattformen sind auch unter der Bezeichnung automatisch gesteuerte Fahrzeuge bekannt. Diese Systeme sind in der Lage, sich frei in ihrer Umgebung zu bewegen, ohne dass die gewünschte Route durch eingelassene Führungsdrähte, aufgemalte optische Markierungen oder sonstige auf dem Boden oder in der Umgebung angebrachte Landmarken definiert werden muss.
Anstelle von Modifikationen der Umgebung werden die anzufahrenden Stationen und die sie verbindenden Pfade per Software festgelegt. Die Steuerungssoftware der mobilen Plattform erstellt schnell und komfortabel eine einfache 2D-Karte der Umgebung. In dieser Karte werden dann mit dem Joystick und ein paar Mausklicks alle denkbaren Fahrstrecken definiert. Dann ist die Steuerungssoftware in der Lage:
die Plattform auf vordefinierten Pfaden zu bewegen,
eigenständig Pfade zum Ziel auszuwählen oder neu zu planen,
Hindernissen auf der Fahrroute auszuweichen und
programmierte Abläufe innerhalb der Karte auszuführen.
1.2 Anwendungsgebiete
Mobile autonome Roboter sind bestens geeignet für den vielfältigen Einsatz in den unterschiedlichsten Anwendungsbereichen:
Autonomer Transport in industriellen Produktionsbetrieben, z. B. bei der Fabrik-, Labor- oder Reinraumautomatisierung und in der Krankenhauslogistik
Überwachung und Bewachung von Gebäuden und Anlagen
Automatische Messdatenaufnahme auf ausgedehnten Flächen und invordefiniertem Raster (Temperatur, Gaskonzentrationen, Schallpegel, …)
Einsatz in lebensgefährlichen Bereichen, wie der Entschärfung von Gefahrgut oder in Gebieten mit hoher Strahlung
1.3 Zu diesem Dokument
Diese Dokument beschreibt die grundlegende Bedienung des omnidirektionalen Roboters MPO-700. Es ist als Einführung zum Einrichten der Hardware und als Nachschlagewerk zur Fehlerbehebung gedacht.
Der MPO-700 wird ohne Steuerungssoftware geliefert. Ohne ein vom Kunden gestelltes leistungsfähiges Softwarepaket kann der Roboter nicht betrieben werden. Die eigentliche Verwendung des Roboters wird deshalb in diesem Dokument nicht behandelt.
Das Warndreieck markiert Abschnitte, die die Gefahr von Verletzungen, Schäden oder beidem betreffen. Bitte lesen Sie diese Abschnitte mit besonderer Sorgfalt!
Das Verbotssymbol markiert Handlungen und Anwendungsfälle, für die das System nicht zugelassen ist und die nicht erlaubt sind.
Die Glühbirne markierte Abschnitte, die bekannte Probleme, Missverständnisse und Fehler behandeln und soll bei der Fehlerbeseitigung helfen.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 3 von 31
2 Hinweise zum Betrieb
2.1 Produktbeschreibung
Der MPO-700 (und alle darauf aufbauenden Varianten und Modelle) ist ein autonomes Roboterfahrzeug für eine Vielzahl von Einsatzzwecken.
Er besitzt vier Neobotix Fahr-Dreh-Module, die Bewegungen in jede Richtung sowie die Drehung des Fahrzeugs zu jeder Zeit ermöglichen. Die Messdaten von ein oder zwei 2D-Laserscannern können zur Lokalisierung, Navigation und Kollisionsvermeidung genutzt werden. Außerdem übernehmen die Scanner zusätzlich die Überwachung von bis zu vier virtuellen Schutzfeldern um den Roboter herum. Sobald ein Objekt im aktuellen Schutzfeld detektiert wird, wird der Roboter sofort in den Not-Halt-Zustand versetzt.
Damit ist der MPO-700 in der Lage, seine exakte Position innerhalb der Einsatzumgebung festzustellen, Pfade zu beliebigen Zielen zu planen und Personen oder anderen dynamischen Hindernissen selbstständig und sicher auszuweichen.
Auf und am Roboter können verschiedenste zusätzliche Komponenten und Systeme befestigt werden, die an die Stromversorgung der Roboterplattform angeschlossen und vom Bordrechner kontrolliert oder gesteuert werden können.
Bitte beachten Sie, dass der MPO-700 ohne Steuerungssoftware geliefert wird.
Bei Auslieferung ist ein Linux-Betriebssystem inklusive aller benötigten Treiber installiert. Für erste Tests wurde außerdem kostenlos eine verwendbare Version des freien „Robot Operating System“ (ROS) installiert und eingerichtet. Die open-source Software ROS besteht aus verschiedenen Modulen, die von großen Teilen der weltweiten Robotik-Entwickler ständig weiterentwickelt werden und weitestgehend frei verfügbar sind. Aus diesem Grund kann Neobotix leider die Verwendbarkeit der verfügbaren Software-Module für bestimmte Anwendungen nicht garantieren. Ebenso wenig kann Neobotix tiefer gehende Unterstützung bei der Arbeit mit ROS anbieten.
2.2 Bestimmungsgemäße Verwendung
Der MPO-700 wurde für den Einsatz in der Servicerobotik-Forschung konzipiert. Er kann dort für verschiedenste Experimente und Tests zum Beispiel in den Bereichen autonome Fahrzeuge, mobile Manipulation oder Fabrikautomatisierung eingesetzt werden.
Abhängig von der vorgesehenen Anwendung kann der MPO-700 alleine, zusammen mit weiteren Roboterfahrzeugen und in Kombination mit stationären Systemen betrieben werden. Zusätzlich kann die Roboterplattform um die für die jeweilige Anwendung benötigten Anbauten erweitert werden. So können zum Beispiel eine Ladefläche, ein Roboterarm oder spezielle Sensoren integriert werden.
Der MPO-700 ist primär für den Einsatz in Labors, Versuchshallen und vergleichbar geschützten Umgebungen vorgesehen. Von einem Einsatz im Außenbereich, insbesondere bei Regen, Nebel oder Schnee, wird ausdrücklich abgeraten.
2.3 Vom Kunden zu erbringende Arbeiten
Beim MPO-700 handelt es sich um einen sehr komplexen Roboter, dessen späterer Einsatz bei der Entwicklung nicht im Detail vorauszusehen war. Abgesehen von allen eventuell für spätere Forschungsarbeiten und Experimente notwendigen Modifikationen sind deshalb auch einige grundlegende Arbeiten erforderlich, damit der Roboter sicher eingesetzt werden kann.
Es muss durch den Kunden eine Risikobeurteilung des einsatzbereiten Gesamtsystems durchgeführt werden und die für einen sicheren Betrieb erforderlichen Maßnahmen müssen ermittelt werden.
Alle für den sicheren Betrieb erforderlichen Maßnahmen müssen vom Kunden entsprechend dem Ergebnis der Risikobeurteilung vorgenommen werden. Die
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 4 von 31
Verantwortung für den sicheren Betrieb liegt allein beim Kunden.
Die Steuerungssoftware des Roboters muss vom Kunden bereitgestellt und eingerichtet werden. Der sichere Betrieb des Roboters hängt stark von der erfolgreichen und zuverlässigen Funktion der Steuerung ab. Deshalb ist es notwendig, Geschwindigkeit und Arbeitsraum des Roboters auf sichere Bereiche zu begrenzen und jederzeit für eine exakte Koordination aller Antriebsachsen zu sorgen.
Verschiedene Sicherheitsmaßnahmen können für die Arbeitssicherheit des Roboters notwendig sein. Die folgende Liste gibt einen kurzen Überblick über mögliche Maßnahmen und erhebt keinen Anspruch auf Vollständigkeit.
Im Einzelfall können zusätzliche Maßnahmen nötig sein, um einen sicheren Betrieb zu garantieren!
Die Laserscanner müssen entsprechend der jeweiligen Anwendung konfiguriert werden.
Taktile Sensorleisten und Bumper können montiert werden.
Geschwindigkeit, Leistung und Arbeitsraum des Roboters können begrenzt werden.
Verkleidungen und Abschirmungen können an der Plattform montiert werden.
2.4 Unzulässige Verwendung
Der MPO-700 darf nicht zur Personenbeförderung eingesetzt werden. Weder dürfen Personen auf dem Roboter selbst mitfahren, noch darf der MPO-700 genutzt werden, um andere Fahrzeuge oder Anhänger mit darauf fahrenden Personen zu bewegen.
Der MPO-700 darf nicht in öffentlich zugänglichen Bereichen betrieben werden und besitzt keine Zulassung für diese Art des Betriebs.
Der MPO-700 darf zu keiner Zeit ohne Aufsicht durch einen sachkundigen Bediener in der Nähe von Gästen, Passanten oder anderen nicht-sachkundigen Personen betrieben werden.
Der Roboter darf nicht in Bereichen betrieben werden, in denen die Gefahr eines Sturzes über Treppenabgänge, Ladeplattformen oder ähnliches besteht. Dies kann zu schweren Verletzungen bis hin zum Tod führen!
2.5 Einsatzumgebung
Die Einsatzumgebung des MPO-700 muss regengeschützt sein und einen ausreichend festen und sauberen Untergrund besitzen. Außerdem muss der Boden, der vom Roboter befahren werden soll, eben und waagerecht sein.
Der Roboter besitzt keinerlei Möglichkeit, Treppenabgänge oder andere Absturzstellen zu erkennen. Bei einem Verlust der Lokalisierung oder einer fehlerhaften Programmierung besteht deshalb die Möglichkeit, dass der Roboter abstürzt.
Prüfen und sichern Sie vor dem Einsatz des Roboters unbedingt alle erreichbaren Absturzstellen, um Verletzungen und Schäden zu verhindern.
Steigungen, Kanten, Stufen und Unebenheiten können zu erheblichen Problemen beim Fahren und bei der Lokalisierung führen. Unter Umständen kann es passieren, dass der Roboter seine Position nicht mehr korrekt bestimmen kann und deshalb unnötige oder problematische Pfade plant beziehungsweise sein Ziel nicht mehr erreichen kann.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 5 von 31
Regen oder starkes Spritzwasser können unter Umständen in den Roboter eindringen und zu Schäden führen. Schmutz und Flüssigkeiten auf der Fahrfläche können nicht nur zu Schlupf und damit zu Problemen mit der Lokalisierung und Navigation führen, sondern reduzieren auch die Lebensdauer der Antriebskomponenten.
2.6 Sachkundiges Personal
Dieses Produkt darf nur von sachkundigem Personal umgebaut, in Betrieb genommen und betrieben werden. Sachkundig ist, wer
aufgrund seiner fachlichen Ausbildung und Erfahrung ausreichende Kenntnisse auf den für die jeweilige Arbeit erforderlichen Gebieten der Mechatronik und Robotik hat
und
vom Betreiber der Maschine in der Bedienung und den gültigen Sicherheitsrichtlinien unterwiesen wurde
und
mit den einschlägigen staatlichen Arbeitsschutzvorschriften, Unfallverhütungs-vorschriften, Richtlinien und allgemein anerkannten Regeln der Technik (z. B. DIN-Normen, VDE-Bestimmungen, technische Regeln) so weit vertraut ist, dass er den arbeitssicheren Zustand des Roboters beurteilen kann
und
Zugriff auf diese Unterlagen und hat und diese gelesen hat.
Als nicht-sachkundig gelten im allgemeinen, aber nicht ausschließlich:
nicht mit dem Roboter vertraute Praktikanten oder Mitarbeiter,
Besucher und Gäste,
alle Mitarbeiter anderer Abteilungen des Unternehmens oder der Einrichtung, in der der Roboter betrieben wird.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 6 von 31
3 Sicherheitshinweise
Der autonome, omnidirektionale Roboter MPO-700 ist ein hochkomplexes Robotersystem, das nicht nur verschiedenste Aufgaben zuverlässig übernehmen kann, sondern auch in der Lage ist, sehr variabel auf seine Umgebung zu reagieren. Unter Umständen kann es dabei zu Situationen kommen, in denen das Verhalten des Roboters für Unbeteiligte oder nicht eingewiesene Personen überraschend oder nicht unmittelbar nachvollziehbar erscheint.
Es ist daher unbedingt erforderlich, dass alle der folgenden Sicherheitshinweise jederzeit eingehalten werden. Nur dann ist ein sicherer und effizienter Betrieb des Systems möglich.
3.1 Einweisung
Machen Sie immer sich selbst und alle betroffenen Personen (Werker, Programmierer, Besucher, etc.) ausführlich mit dem Roboter, seiner Bedienung und seinem Verhalten vertraut, bevor Sie die Arbeit aufnehmen oder den Roboter autonom arbeiten lassen.
Aufgrund der Komplexität des Robotersystems ist eine Schulung vor der Inbetriebnahme unabdingbar. Das vorliegende Dokument soll als Nachschlagewerk bei Problemen dienen, die die Hardware betreffen und schnell diagnostiziert und behoben werden können. Alle weiteren Probleme, Fehler und Stolpersteine können am besten durch eine ausführliche Schulung der Programmierer und eine gründliche Einweisung der Bediener vermieden werden.
3.2 Sicherheitssystem
Der mobile Roboter verfügt standardmäßig über mehrere Sicherheitsvorkehrungen und kann bei Bedarf um zusätzliche Funktionen erweitert werden. Vor der Inbetriebnahme ist unbedingt zu prüfen, ob der gewünschte Sicherheitsstandard mittels der realisierten Maßnahmen am Roboter selbst und in seiner Arbeitsumgebung erreicht wird.
Einige Sicherheitsfunktionen, vor allem die Laserscanner, können bei Auslieferung stark eingeschränkt oder sogar abgeschaltet sein, um den Transport zum Einsatzort zu ermöglichen oder zu erleichtern. Sie müssen gegebenenfalls vor Ort von einem sachkundigen Techniker eingerichtet und getestet werden, ehe das System vollständig in Betrieb genommen werden darf!
Not-Halt-TastenWird eine der Not-Halt-Tasten gedrückt, werden sofort sämtliche Antriebe von der Versorgungsspannung getrennt und die Sicherheitsbremsen der Motoren fallen ein. Dies geschieht rein hardwareseitig und kann nicht per Software übergangen oder außer Kraft gesetzt werden. Damit ist maximale Sicherheit gewährleistet.
Funk-Not-Halt-System Das optionale Funk-Not-Halt-System bietet die Möglichkeit, den Roboter aus der Entfernung in den Not-Halt-Zustand zu versetzen, ohne dass sich der Bediener dabei im potentiell gefährlichen Arbeitsraum des Roboters befinden muss. Standardmäßig wird die einfachste Systemkonfiguration installiert. Abhängig von den jeweiligen Anforderungen, können aber auch komplexere Funktionen realisiert werden.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 7 von 31
LaserscannerMit dem Laserscanner S300 besteht die Möglichkeit, benutzerdefinierte Schutzfelder um den Roboter herum zu definieren, die entsprechend der aktuellen Situation von der anwendungsspezifischen Steuerung aktiviert werden können. Die Verantwortung für die korrekte Zuordnung der Felder zum aktuellen Zustand liegt immer beim Anwenderprogramm.
Sobald eine Person oder ein Hindernis in dem zu diesem Zeitpunkt aktiven Schutzfeld identifiziert wird, löst dies unmittelbar einen Not-Halt aus. Wenn das Schutzfeld wieder frei ist, wird der Not-Halt automatisch zurückgesetzt. Eine manuelle Freigabe ist nicht erforderlich.
Obwohl das Überwachen der Schutzfelder per Software erfolgt, ist der Scanner als Sicherheitsgerät der Klasse SIL2 zugelassen und erreicht Performance Level d. Er ersetzt die Schaumstoffschaltleisten, die früher für den Einsatz autonomer Fahrzeuge in öffentlichen Bereichen vorgeschrieben waren.
SonderfunktionenFalls der Einsatz fremder Software auf der Roboterplattform oder dem Leitrechner erforderlich ist, kann dieser Software bei Bedarf gestattet werden, einen Not-Halt auszulösen und wieder freizugeben.
Außerdem sind hardwareseitige Eingriffe in den Not-Halt-Kreis, etwa über Funk-Schalter oder ähnliches, möglich.
Wenden Sie sich bitte an Neobotix, wenn Sie Sonderfunktionen realisieren möchten!
3.3 Aufenthalt im Gefahrenbereich
Unmittelbare UmgebungDer Aufenthalt in der unmittelbaren Umgebung des Roboters ist generell zu vermeiden, solange sich das System nicht im vollen Not-Halt-Zustand befindet.
Insbesondere das Mitfahren auf dem Roboter und das Beklettern sind zu keiner Zeit zulässig.
Nähere UmgebungBeim Aufenthalt in der Nähe des Roboters ist erhöhte Aufmerksamkeit und Vorsicht geboten. Die Schutzeinrichtungen sind vor dem Betrieb so einzustellen, dass mögliche Gefahren rechtzeitig erkannt und Verletzungen oder Kollisionen verhindert werden können.
Sollten aufgrund der Anforderungen des Einsatzfalles Einschränkungen am Sicherheitssystem vorgenommen werden, so ist gegebenenfalls auch der Aufenthalt in der näheren Umgebung des Roboters zu vermeiden. In solchen Fällen ist der Betreiber des Robotersystems für die Aufrechterhaltung der Betriebssicherheit allein verantwortlich.
Weitere UmgebungSofern die Sicherheitsfunktionen des Roboters entsprechend ausgelegt sind, ist der Aufenthalt von Personen und Fahrzeugen in der weiteren Umgebung des Roboters problemlos möglich. Bitte lassen Sie sich bei Bedarf von Neobotix entsprechend beraten.
Alle betroffenen Personen sollten jedoch eine ausführliche Einweisung in das Verhalten und die potentiellen Gefahren des Robotersystems erhalten und müssen sich dementsprechend verhalten.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 8 von 31
3.4 Gefahrenstellen
Lithium-Ionen-BatterieDie optionale Lithium-Ionen-Batterie erfordert ein höheres Maß an Aufmerksamkeit und Verständnis, als die Standardbatterie auf Blei-Basis.
Die Lithium-Ionen-Batterie muss vor physischen Schäden, Überhitzung und Überströmen geschützt werden. Aufgrund ihrer chemischen Zusammensetzung besitzen Lithium-Ionen-Batterien immer ein gewisses Brandrisiko bei schweren Schäden, starker Überhitzung oder massivem Überladen.
Bitte wenden Sie sich umgehend an Neobotix, falls Sie irgendeine Änderung an der Batterie bemerken oder Fragen oder Zweifel hinsichtlich der Batterie oder ihrer Handhabung haben.
Fahr-Dreh-ModuleDie vier Fahr-Dreh-Module des MPO-700 sind gegen Verschmutzung und Feuchtigkeit geschützt und im Stillstand berührsicher. Trotzdem kann es zu Verletzungen oder Beschädigungen kommen, wenn Körperteile oder Gegenstände während des Betriebes mit den Antriebseinheiten in Kontakt kommen. Zum Beispiel können Hände oder Füße in den Zwischenraum zwischen Antriebsrad und Gehäuse gezogen werden oder sie werden vom Roboter überrollt.
Bei Arbeiten an oder mit dem Roboter ist deshalb stets Vorsicht geboten. Es wird empfohlen, geeignete Verkleidungsteile für die Fahr-Dreh-Module zu konstruieren und anzubringen.
Verkabelung und ElektronikDie Großteil der Verkabelung der MPO-700 und die meisten elektrischen Komponenten sind nur durch die äußeren Aluminiumplatten geschützt, um den Zugang und die Möglichkeiten des Umbaus und der Integration in ein größeres Robotersystem zu erleichtern.
Arbeiten an den elektrischen und elektronischen Komponenten dürfen nur von entsprechend ausgebildetem Personal durchgeführt werden. Dabei ist mit großer Vorsicht vorzugehen, um Kurzschlüsse, Überlastungen und andere Fehler zu vermeiden.
3.5 Inbetriebnahme
Nach der Installation sowie nach Veränderungen an der Einsatzumgebung oder den Arbeitsabläufen ist eine überwachte Inbetriebnahme des gesamten Systems unter Berücksichtigung aller vorgesehenen Prozessschritte durchzuführen. Erst nach einem uneingeschränkt erfolgreichen Testlauf darf der automatische Betrieb aufgenommen werden.
Ebenso wird nach Reparaturen, Wartungsarbeiten und sonstigen Veränderungen ein überwachter Testlauf dringend empfohlen. Dies betrifft unter anderem geänderte Bewegungsbahnen und Zielpositionen, Parameter, Umgebungsbedingungen und übergeordnete Steuerungen.
Neobotix haftet in keiner Form für Verletzungen oder Schäden, die durch vor dem automatischen Betrieb feststellbare und / oder vermeidbare Fehler jeglicher Art verursacht werden.
3.6 Veränderungen am System
Mechanische, elektrische und softwaretechnische Arbeiten und Veränderungen dürfen nur nach Absprache mit Neobotix und nach der notwendigen Einweisung bzw. Schulung erfolgen.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 9 von 31
Sollen ein oder mehrere Roboter mehrmals oder sogar serienmäßig modifiziert werden, so ist in Absprache mit Neobotix sicherzustellen, dass alle an diesen Arbeiten beteiligten Personen die dafür notwendigen Kenntnisse besitzen. Modifizierte Roboter sind vor der Wiederinbetriebnahme auf ihre Funktionsfähigkeit und insbesondere auf die uneingeschränkte Einhaltung der Betriebssicherheit zu überprüfen.
Bei eigenmächtigen oder unsachgemäßen Veränderungen am Robotersystem erlöschen alle Garantien. Gefahr und Verantwortung für den weiteren Betrieb gehen vollständig auf denjenigen über, der die Veränderungen angeordnet bzw. durchgeführt hat.
3.7 Zu erwartende Fehlbedienung
PersonenbeförderungAus zahlreichen Gründen ist die Beförderung von Personen auf oder durch den MPO-700 mit Gefahren verbunden und generell verboten.
Die Neobotix GmbH übernimmt keinerlei Haftung für Verletzungen und / oder Schäden die durch vom MPO-700 beförderte Personen verursacht werden.
SchutzfelderDie Schutzfelder der Laserscanner müssen vom Betreiber des Roboters vor jeder Inbetriebnahme in einem neuen Arbeitsumfeld oder in einer neuen Anwendung entsprechend konfiguriert und getestet werden. Falls mehrere unterschiedliche Schutzfelder verwendet werden sollen, so ist allein der Betreiber dafür verantwortlich, dass zu jedem Zeitpunkt das passende, sichere Schutzfeld aktiviert wird.
Falsch eingestellte oder fehlerhaft aktivierte Schutzfelder resultieren in einem unsicheren und unter Umständen sogar gefährlichen Betrieb des Roboters.
UmgebungsbedingungenBei der Auswahl und Vorbereitung der Umgebung ist darauf zu achten, dass sowohl die Lokalisierung als auch die Bewegungssteuerung zuverlässig arbeiten können. Der MPO-700 wurde nur für den Einsatz in Gebäuden entwickelt. Außeneinsätze können zu erhöhtem Verschleiß und zu Schäden am Roboter führen.
Eine verlässliche Lokalisierung erfordert gut sichtbare, eindeutige Landmarken und eine exakte, gut zu verarbeitende Umgebungskarte. In der Bedienungsanleitung zu der verwendeten Steuerungssoftware finden Sie nähere Informationen zu diesem Thema. Bitte wenden Sie sich im Zweifel an Neobotix.
Für die Bewegungssteuerung ist ein ebener Untergrund erforderlich, auf dem es nicht zu Schlupf kommt. Verunreinigungen wie Staub, Sand, Öl oder Wasser können dazu führen, dass einige der Räder durchdrehen und der Roboter sich unkontrolliert bewegt. Außerdem kann es zum Verlust der Lokalisierung kommen, wodurch der Roboter eventuell seinen zugewiesenen Pfad verlässt und verbotene oder gefährliche Bereiche durchfährt.
Der Roboter darf nicht in Bereichen betrieben werden, in denen die Gefahr eines Sturzes über Treppenabgänge, Ladeplattformen oder ähnliches besteht.
Mechanische ÜberlastDie angegebene maximale Zuladung darf nicht überschritten werden. Eine Überladung des Roboters kann zu einer verringerten Lebensdauer der Antriebseinheiten und zu Schäden am Roboter führen. Außerdem kann dadurch das Fahrverhalten beeinträchtigt werden, so dass vorgegebene Pfade nicht mehr eingehalten werden oder der Roboter unerwünschte Bewegungen ausführt.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 10 von 31
Elektrische ÜberlastDie Bordstromversorgung darf nicht überlastet werden. In extremen Fällen könnte es sonst zu Überhitzung, Beschädigung der elektrischen Leiter und zu Kurzschlüssen kommen.
Bitte wenden Sie sich an Neobotix, bevor Sie Umbauten der Elektrik des Roboters vornehmen.
Laden der BatterieDie optionale Lithium-Ionen-Batterie sollte nur mit dem mitgelieferten Netzteil und nur entsprechend den Hinweisen im Kapitel „Wartung – Laden der Batterie – Die Lihium-Ionen-Batterie“ erfolgen.
Wird die Lithium-Ionen-Batterie mit einer anderen Stromquelle oder auf eine andere Weise geladen, kann es zu Schäden oder sogar zum Brand kommen.
ModifikationenVor dem Beginn jeglicher Umbauten muss der Roboter ausgeschaltet und von allen Spannungsquellen getrennt werden. Bei Arbeiten an einem unter Spannung stehenden oder sogar eingeschalteten Roboter besteht die Gefahr eines elektrischen Schlages und die Möglichkeit, die Elektrik und / oder Elektronik zu beschädigen.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 11 von 31
4 Transport
4.1 Verpackung
Der mobile Roboter MPO-700 wird in einer stabilen Holzkiste geliefert, die auch für spätere Transporte verwendet werden kann. Falls die ursprüngliche Kiste nicht mehr verwendet werden kann, zum Beispiel wegen Aufbauten und Erweiterungen, empfiehlt es sich, eine neue, entsprechend dimensionierte Kiste aufzubauen.
Generell ist darauf zu achten, dass der Kistenboden ausreichend stabil ist und auch ungleichmäßigen Belastungen, etwa beim Transport mit Hubwagen oder Gabelstapler, standhält. Außerdem muss der Roboter immer mit einer ausreichenden Menge von geeignetem Puffermaterial gegen ein mögliches Verrutschen gesichert werden. Um das Eindringen von Staub und Schmutz in den Roboter zu verhindern, sollte der MPO-700 vor dem Transport in Plastikfolie oder Luftpolsterfolie eingewickelt werden.
Abhängig vom verwendeten Puffermaterial kann es sinnvoll sein, den Schlüsselschalter abzuziehen und separat zu transportiert, um Schäden am Schloss zu vermeiden. Im Kapitel „Hardwarebeschreibung - Bedienelemente“ finden Sie weitere Informationen zu diesem Thema.
Es wird dringend empfohlen, die Batterie vor dem Transport aus dem Roboter zu entnehmen. Dadurch werden übermäßige Belastungen der Batteriewanne und der tragenden Teile vermieden und Schäden verhindert. Falls die Batterie nicht ohne weiteres herausgenommen werden kann, zum Beispiel aufgrund der Außenhülle des Roboters, sollte sie mit Holzbalken oder anderen geeigneten Teilen abgestützt und fixiert werden.
Auspacken des RobotersWird der Roboter in der Originalkiste transportiert, sollte nur deren Deckel entfernt werden. Anschließend können die eventuell beiliegenden Zusatzkomponenten und das Puffermaterial herausgenommen werden.
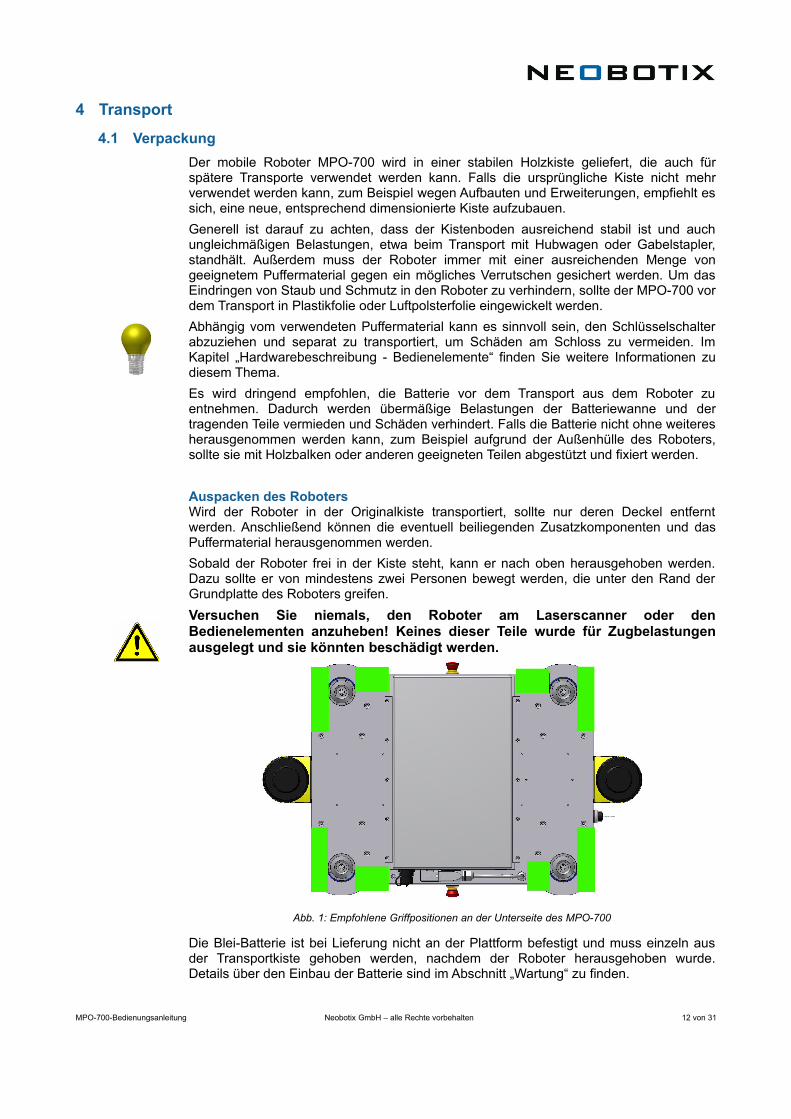
Sobald der Roboter frei in der Kiste steht, kann er nach oben herausgehoben werden. Dazu sollte er von mindestens zwei Personen bewegt werden, die unter den Rand der Grundplatte des Roboters greifen.
Versuchen Sie niemals, den Roboter am Laserscanner oder den Bedienelementen anzuheben! Keines dieser Teile wurde für Zugbelastungen ausgelegt und sie könnten beschädigt werden.
Abb. 1: Empfohlene Griffpositionen an der Unterseite des MPO-700
Die Blei-Batterie ist bei Lieferung nicht an der Plattform befestigt und muss einzeln aus der Transportkiste gehoben werden, nachdem der Roboter herausgehoben wurde. Details über den Einbau der Batterie sind im Abschnitt „Wartung“ zu finden.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 12 von 31
4.2 Langstrecken
Bei entsprechender Verpackung gibt es keine besonderen Anforderungen an den Transport des MPO-700. Lediglich wenn der Roboter für längere Zeit sehr tiefen Temperaturen (unter -10°C) ausgesetzt war sollte er sich vor dem Einschalten auf normale Raumtemperatur erwärmen. Dadurch können Schäden an der Elektronik und den Laserscannern vermieden werden.
Transport mit Blei-BatterieSofern der Schlüssel entfernt wurden, besteht keine Gefahr, dass sich der Roboter selbst einschaltet oder die Batterien während des Transports entladen werden.
Vor einem Transport per Luftfracht ist es jedoch sinnvoll, die Batterien vom Bordnetz zu trennen und damit jedes Risiko auszuschließen. Die Batterien selbst sind auslaufsicher gekapselt und für den Transport per Luftfracht zugelassen.
Transport mit Lithium-Ionen-BatterieAufgrund der Sicherheitsbestimmungen muss die Lithium-Ionen-Batterie separat in einem speziellen Container transportiert werden, damit auch bei möglichen Unfällen ein ausreichendes Sicherheitsniveau gewährleistet ist.
Beim Transport der Lithium-Ionen-Batterie sind die Gefahrgutbestimmungen für Gefahrgut Klasse 9 einzuhalten.
4.3 Kurze und kürzeste Strecken
Für kurze Strecken kann der MPO-700 auch ohne Kiste im Koffer- oder Laderaum eines PKW transportiert werden. Achten Sie jedoch immer auf eine ausreichende Sicherung und fahren Sie den Roboter nicht durch Außenbereiche. Wenn der MPO-700 in einem PKW transportiert wird, sollte in jedem Fall die Batterie herausgenommen werden, um die Transportsicherheit zu erhöhen und die entstehenden Schlag- und Stoßbelastungen zu reduzieren.
Falls der Roboter über unebenen oder schmutzigen Untergrund bewegt werden muss, etwa über einen Parkplatz, sollte er dazu nach Möglichkeit auf ein Rollbrett oder einen Rollwagen gehoben werden.
Lassen Sie den Roboter beim Transport mittels Rollbrett oder Rollwagen niemals ungesichert und / oder unbeaufsichtigt. Vermeiden Sie Gefälle und alle Unebenheiten, an denen die Räder des Untersatzes blockieren könnten.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 13 von 31
5 Installation
5.1 Ladegerät
Das Batterieladegerät benötigt einen normalen 230V/50Hz-Stromanschluss.
Das Gerät muss in einer trockenen Umgebung mit ausreichender Kühlmöglichkeit aufgestellt werden. Decken Sie das Ladegerät nicht ab und vermeiden Sie direktes Sonnenlicht. Falls die Plattform über die automatische Ladestation aufgeladen werden soll, verbinden sie deren Versorgungskabel mit dem Ausgang des Ladegerätes und verschrauben Sie die Stecker sorgfältig.
Die Plattform kann manuell aufgeladen werden, indem der Stecker des Batterieladegerätes in die Ladebuchse (siehe Kapitel „Bedienelemente“) gesteckt und festgeschraubt wird. Die Buchse ist durch eine Schutzkappe gesichert, die leicht von Hand abgeschraubt werden kann.
Das Aufladen erfolgt vollautomatisch, sobald die Verbindung hergestellt und das Ladegerät an das Stromnetz angeschlossen wurde. Für den Ladevorgang ist es prinzipiell ohne Bedeutung, ob der Roboter ein- oder ausgeschaltet ist, lediglich die Dauer des Ladevorgangs ändert sich. Mit laufender Bordelektronik dauert ein vollständiges Aufladen je nach Auslastung des Bordcomputers teilweise merklich länger.
Das Ladegerät besitzt einen Überspannungsschutz und kann problemlos auch länger (zum Beispiel über Nacht) angeschlossen bleiben. Unter Umständen kann es jedoch nötig sein, das Ladegerät ungefähr einmal täglich aus- und wieder einzuschalten, falls der Roboter während des Ladens für längere Zeit (zum Beispiel zum Programmieren) eingeschaltet bleibt.
Trennen Sie immer zuerst das Ladegerät vom Stromnetz oder schalten Sie es ab bevor Sie die Verbindung zum Roboter lösen, um Lichtbögen und Verschleiß der Kontakte zu vermeiden!
5.2 Automatische Ladestation
Vorbereitungen für automatisches LadenDie automatische Ladestation ist ausgesprochen robust und lässt sich sehr leicht aufbauen und in das Programm des Roboters einbinden.
Um ein schnelles und problemloses Andocken zu ermöglichen, ist ein gewisser Freiraum rund um die Ladestation nötig. Wählen Sie einen Platz, der leicht vom Roboter angefahren werden kann und in dem weder der ladende Roboter noch die Station selbst jemanden behindern können. Zum Anschluss des Ladegerätes muss zudem eine Steckdose in der Nähe vorhanden sein.
Bitte beachten Sie bei der Wahl des Standortes die folgenden Punkte:
Um die Ladekontakte auf die richtige Höhe zu bringen, muss die Unterkante der Trägerplatte der Ladestation direkt auf dem Boden aufsitzen.
Die Ladestation muss an einer stabilen Wand befestigt werden. Bitte wenden Sie sich an Neobotix, falls Sie eine freistehende Station benötigen.
Die Ladestation muss mittig am Ende einer mindesten 1,0m breiten, freien Anfahrstrecke montiert werden.
Bei Verwendung von mehreren Ladestationen sollte ein Raster von ebenfalls mindestens 1,0m eingehalten werden.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 14 von 31
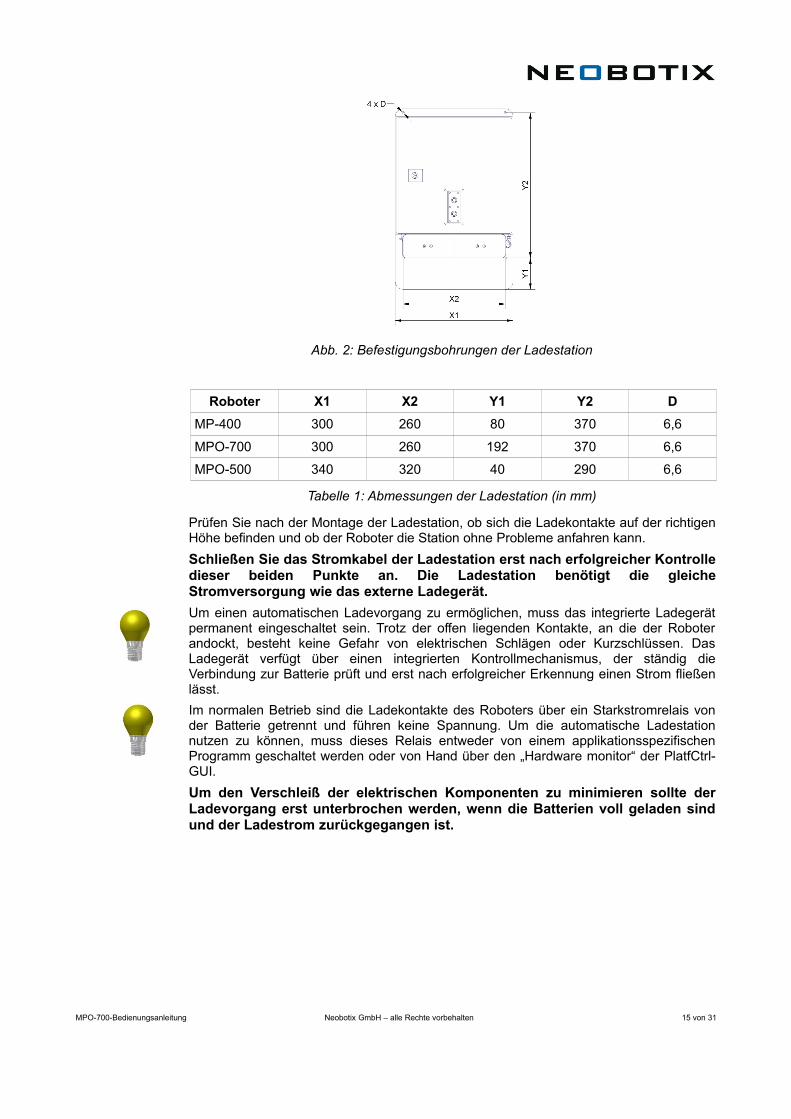
Abb. 2: Befestigungsbohrungen der Ladestation
Roboter X1 X2 Y1 Y2 D
MP-400 300 260 80 370 6,6
MPO-700 300 260 192 370 6,6
MPO-500 340 320 40 290 6,6
Tabelle 1: Abmessungen der Ladestation (in mm)
Prüfen Sie nach der Montage der Ladestation, ob sich die Ladekontakte auf der richtigen Höhe befinden und ob der Roboter die Station ohne Probleme anfahren kann.
Schließen Sie das Stromkabel der Ladestation erst nach erfolgreicher Kontrolle dieser beiden Punkte an. Die Ladestation benötigt die gleiche Stromversorgung wie das externe Ladegerät.
Um einen automatischen Ladevorgang zu ermöglichen, muss das integrierte Ladegerät permanent eingeschaltet sein. Trotz der offen liegenden Kontakte, an die der Roboter andockt, besteht keine Gefahr von elektrischen Schlägen oder Kurzschlüssen. Das Ladegerät verfügt über einen integrierten Kontrollmechanismus, der ständig die Verbindung zur Batterie prüft und erst nach erfolgreicher Erkennung einen Strom fließen lässt.
Im normalen Betrieb sind die Ladekontakte des Roboters über ein Starkstromrelais von der Batterie getrennt und führen keine Spannung. Um die automatische Ladestation nutzen zu können, muss dieses Relais entweder von einem applikationsspezifischen Programm geschaltet werden oder von Hand über den „Hardware monitor“ der PlatfCtrl-GUI.
Um den Verschleiß der elektrischen Komponenten zu minimieren sollte der Ladevorgang erst unterbrochen werden, wenn die Batterien voll geladen sind und der Ladestrom zurückgegangen ist.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 15 von 31
6 Inbetriebnahme
6.1 Bedienelemente
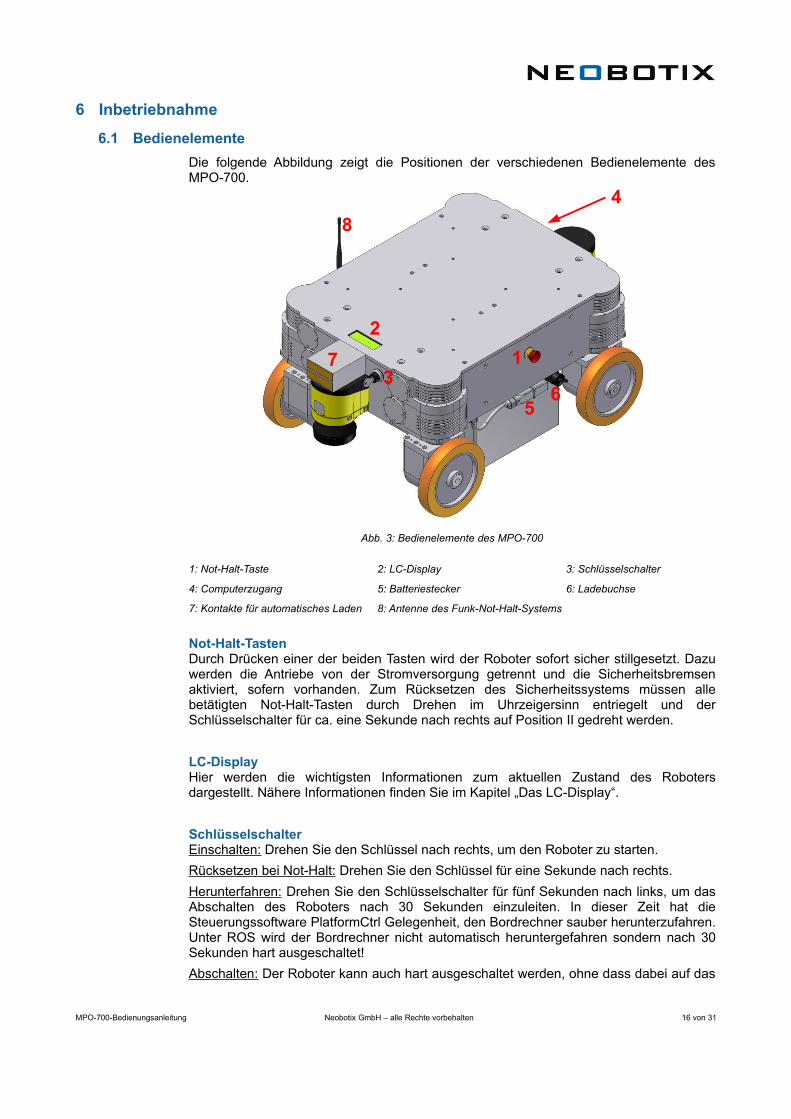
Die folgende Abbildung zeigt die Positionen der verschiedenen Bedienelemente des MPO-700.
Abb. 3: Bedienelemente des MPO-700
1: Not-Halt-Taste 2: LC-Display 3: Schlüsselschalter
4: Computerzugang 5: Batteriestecker 6: Ladebuchse
7: Kontakte für automatisches Laden 8: Antenne des Funk-Not-Halt-Systems
Not-Halt-TastenDurch Drücken einer der beiden Tasten wird der Roboter sofort sicher stillgesetzt. Dazu werden die Antriebe von der Stromversorgung getrennt und die Sicherheitsbremsen aktiviert, sofern vorhanden. Zum Rücksetzen des Sicherheitssystems müssen alle betätigten Not-Halt-Tasten durch Drehen im Uhrzeigersinn entriegelt und der Schlüsselschalter für ca. eine Sekunde nach rechts auf Position II gedreht werden.
LC-DisplayHier werden die wichtigsten Informationen zum aktuellen Zustand des Roboters dargestellt. Nähere Informationen finden Sie im Kapitel „Das LC-Display“.
SchlüsselschalterEinschalten: Drehen Sie den Schlüssel nach rechts, um den Roboter zu starten.
Rücksetzen bei Not-Halt: Drehen Sie den Schlüssel für eine Sekunde nach rechts.
Herunterfahren: Drehen Sie den Schlüsselschalter für fünf Sekunden nach links, um das Abschalten des Roboters nach 30 Sekunden einzuleiten. In dieser Zeit hat die Steuerungssoftware PlatformCtrl Gelegenheit, den Bordrechner sauber herunterzufahren. Unter ROS wird der Bordrechner nicht automatisch heruntergefahren sondern nach 30 Sekunden hart ausgeschaltet!
Abschalten: Der Roboter kann auch hart ausgeschaltet werden, ohne dass dabei auf das
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 16 von 31
1
2
3
4
56
7
8
saubere Herunterfahren des Bordrechners gewartet wird. Dazu muss der Schlüsselschalter erneut nach links gedreht und dort drei Sekunden gehalten werden.
Wird der Rechner auf einem anderen Weg, zum Beispiel über die GUI oder per Fernzugriff, heruntergefahren, so schaltet sich der Roboter anschließend automatisch ab.
ComputerzugangAlle Anschlüsse des Standard-Bordrechners sind von außen zu erreichen.
BatteriesteckerNeben den Hochstromkontakten zur Versorgung des Roboters führt dieser Stecker, falls der Roboter für die Lithium-Ionen-Batterie vorbereitet wurde, zusätzlich noch einen CAN-Bus, über den auf die interne Überwachungselektronik der Lithium-Ionen-Batterie zugegriffen werden kann, sowie zwei Signalkontakte mit denen diese Batterie aktiviert werden kann.
LadebuchseHier kann das Batterieladegerät angeschlossen werden. Nähere Informationen finden Sie im Kapitel „Wartung – Laden der Batterie“.
LadekontakteWenn der MPO-700 für die Verwendung der automatischen Ladestation vorbereitet wurde, können diese Kontakte durch ein Starkstromrelais mit der Batterie verbunden werden.
6.2 Vorbereitungen
Nachdem der MPO-700, wie im Kapitel „Transport“ beschrieben, aus der Transportkiste gehoben wurde, sollte er von Resten des Puffermaterials und von Staub gereinigt werden. Insbesondere die runden schwarzen Optikhauben der Laserscanner müssen sauber sein, da der Roboter sonst nicht verwendet werden kann.
Um den Roboter von Hand zu verschieben, müssen alle vier Fahr-Dreh-Module in die gewünschte Bewegungsrichtung ausgerichtet werden. Der Roboter lässt sich dann zumindest über kurze Distanzen verschieben. Dies ist jedoch nur bei Robotern ohne Bremsen möglich.
Fassen Sie nicht an die Abdeckungen der Laserscanner oder die Not-Halt-Tasten, um den Roboter zu bewegen!
Vor dem ersten Einschalten muss die separat transportierte Batterie eingesetzt werden, wie im Kapitel „Wartung – Batteriewechsel“ beschrieben. Es ist ratsam, die Batterie nach jedem längeren Transport erst über Nacht vollständig aufzuladen, bevor der Roboter eingeschaltet wird.
Falls mehrere mobile Roboter im selben Arbeitsraum eingesetzt werden, sollten sie über kabelgebundene Joysticks gesteuert werden, um eine eindeutige Zuordnung zu garantieren. In diesem Fall muss die mitgelieferte Fernsteuerung in eine USB-Buchse des Bordrechners eingesteckt werden.
6.3 Einschalten und Testen
Stecken Sie den Schlüssel in den Schlüsselschalter und drehen Sie ihn im Uhrzeigersinn, um die Plattform anzulassen.
Setzen Sie gegebenenfalls die Batterien in den kabellosen Joystick ein und warten Sie, bis die Plattform die Steuerungssoftware geladen und die Initialisierung abgeschlossen hat. Sobald der Roboter hochgefahren ist, wird „Robot ready“ auf dem LCD angezeigt
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 17 von 31
und der Roboter ist einsatzbereit.
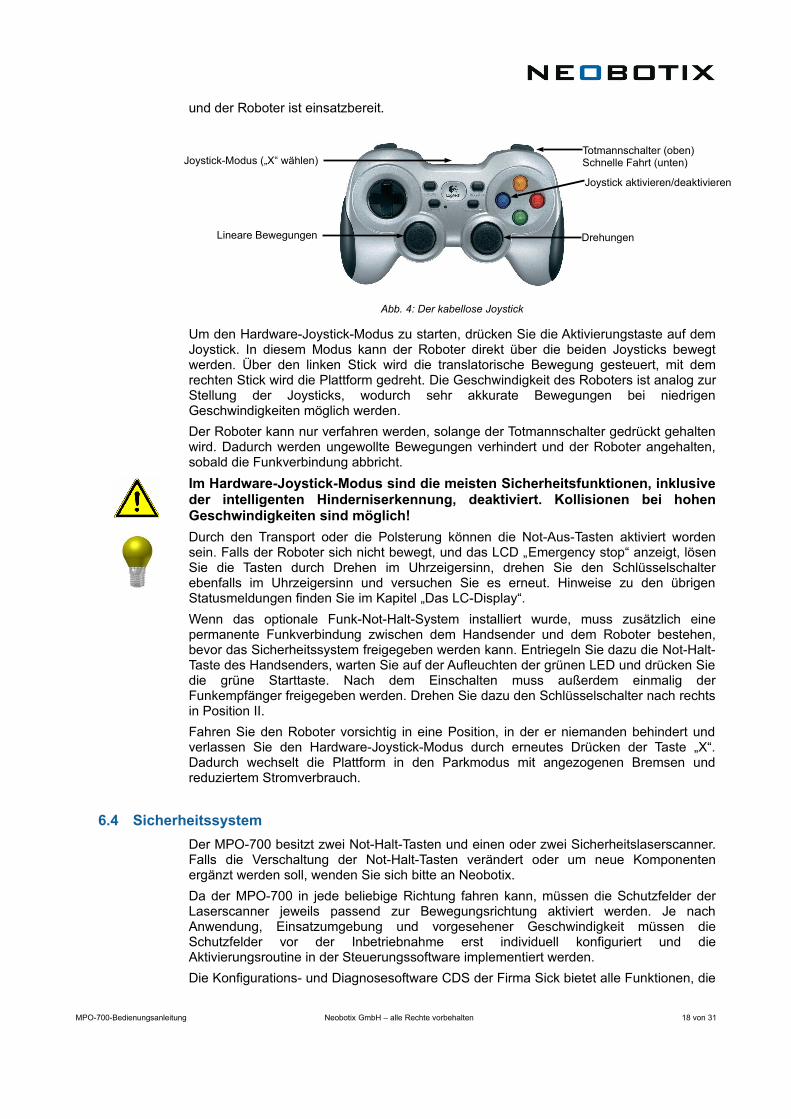
Abb. 4: Der kabellose Joystick
Um den Hardware-Joystick-Modus zu starten, drücken Sie die Aktivierungstaste auf dem Joystick. In diesem Modus kann der Roboter direkt über die beiden Joysticks bewegt werden. Über den linken Stick wird die translatorische Bewegung gesteuert, mit dem rechten Stick wird die Plattform gedreht. Die Geschwindigkeit des Roboters ist analog zur Stellung der Joysticks, wodurch sehr akkurate Bewegungen bei niedrigen Geschwindigkeiten möglich werden.
Der Roboter kann nur verfahren werden, solange der Totmannschalter gedrückt gehalten wird. Dadurch werden ungewollte Bewegungen verhindert und der Roboter angehalten, sobald die Funkverbindung abbricht.
Im Hardware-Joystick-Modus sind die meisten Sicherheitsfunktionen, inklusive der intelligenten Hinderniserkennung, deaktiviert. Kollisionen bei hohen Geschwindigkeiten sind möglich!
Durch den Transport oder die Polsterung können die Not-Aus-Tasten aktiviert worden sein. Falls der Roboter sich nicht bewegt, und das LCD „Emergency stop“ anzeigt, lösen Sie die Tasten durch Drehen im Uhrzeigersinn, drehen Sie den Schlüsselschalter ebenfalls im Uhrzeigersinn und versuchen Sie es erneut. Hinweise zu den übrigen Statusmeldungen finden Sie im Kapitel „Das LC-Display“.
Wenn das optionale Funk-Not-Halt-System installiert wurde, muss zusätzlich eine permanente Funkverbindung zwischen dem Handsender und dem Roboter bestehen, bevor das Sicherheitssystem freigegeben werden kann. Entriegeln Sie dazu die Not-Halt-Taste des Handsenders, warten Sie auf der Aufleuchten der grünen LED und drücken Sie die grüne Starttaste. Nach dem Einschalten muss außerdem einmalig der Funkempfänger freigegeben werden. Drehen Sie dazu den Schlüsselschalter nach rechts in Position II.
Fahren Sie den Roboter vorsichtig in eine Position, in der er niemanden behindert und verlassen Sie den Hardware-Joystick-Modus durch erneutes Drücken der Taste „X“. Dadurch wechselt die Plattform in den Parkmodus mit angezogenen Bremsen und reduziertem Stromverbrauch.
6.4 Sicherheitssystem
Der MPO-700 besitzt zwei Not-Halt-Tasten und einen oder zwei Sicherheitslaserscanner. Falls die Verschaltung der Not-Halt-Tasten verändert oder um neue Komponenten ergänzt werden soll, wenden Sie sich bitte an Neobotix.
Da der MPO-700 in jede beliebige Richtung fahren kann, müssen die Schutzfelder der Laserscanner jeweils passend zur Bewegungsrichtung aktiviert werden. Je nach Anwendung, Einsatzumgebung und vorgesehener Geschwindigkeit müssen die Schutzfelder vor der Inbetriebnahme erst individuell konfiguriert und die Aktivierungsroutine in der Steuerungssoftware implementiert werden.
Die Konfigurations- und Diagnosesoftware CDS der Firma Sick bietet alle Funktionen, die
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 18 von 31
Lineare Bewegungen Drehungen
Joystick aktivieren/deaktivieren
Totmannschalter (oben)Schnelle Fahrt (unten)Joystick-Modus („X“ wählen)
zum schnellen und komfortablen Einrichten der Schutzfelder notwendig sind. Über das dem Roboter beiliegende Konfigurationskabel können die Scanner an die serielle Schnittstelle eines beliebigen Rechners angeschlossen und eingerichtet werden.
In der Standardversion werden die Steuereingänge A und B des vorderen Laserscanners antivalent beschaltet und über zwei Signalrelais auf der Hauptplatine des Roboters angesprochen. Wenn zwei Laserscanner installiert sind, kommunizieren sie über eine sichere Verbindung miteinander und tauschen Statusinformationen aus, so dass bei einer Änderung der Steuersignale automatisch die Schutzfelder beider Scanner geändert werden. Mit Hilfe der CDS können der jeweils aktuelle Zustand der Steuereingänge und die dadurch ausgewählten Schutzfelder angezeigt werden.
Das Sick-Standardpasswort ist SICKSAFE.
Bei Auslieferung ist lediglich ein Schutzfeld definiert, das unabhängig vom Zustand der Eingänge immer aktiv ist. Dieses Schutzfeld ist bewusst sehr eng um den Roboter gelegt und sollte nur für Tests und erste, überwachte Fahrversuche verwendet werden, da es Kollisionen nicht bei allen Geschwindigkeiten und unter allen Umständen verhindern kann.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 19 von 31
7 Komponenten-Diagramm
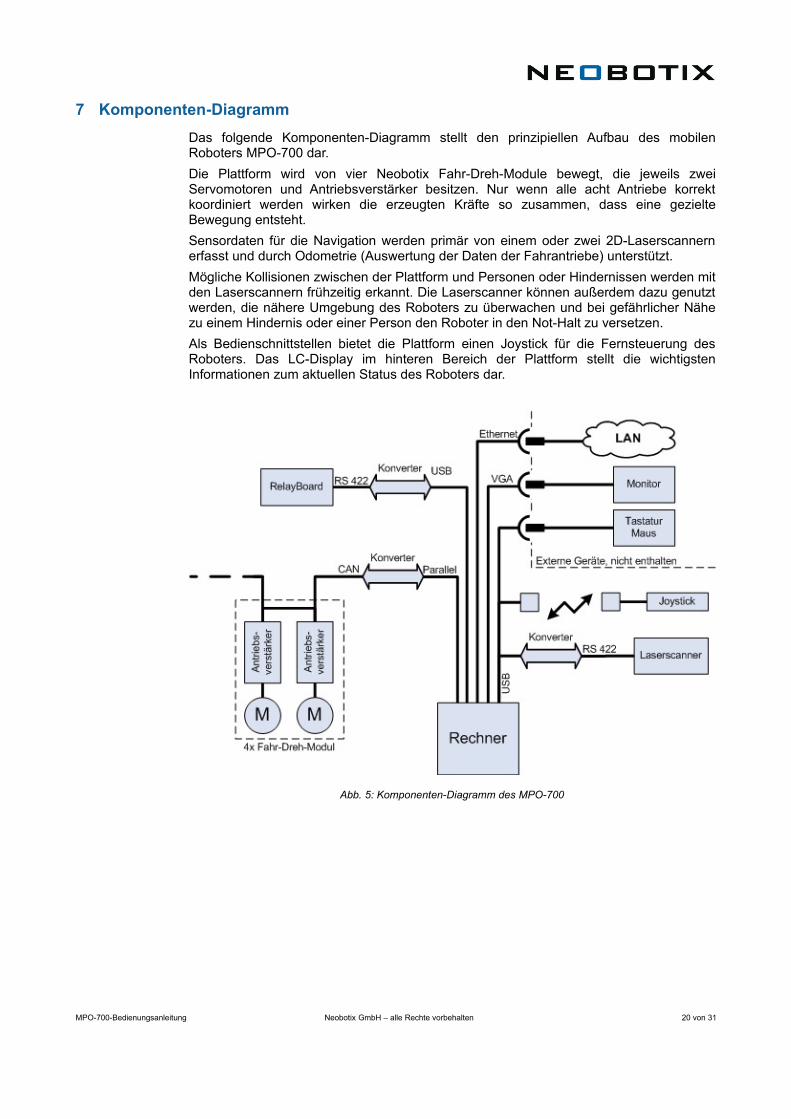
Das folgende Komponenten-Diagramm stellt den prinzipiellen Aufbau des mobilen Roboters MPO-700 dar.
Die Plattform wird von vier Neobotix Fahr-Dreh-Module bewegt, die jeweils zwei Servomotoren und Antriebsverstärker besitzen. Nur wenn alle acht Antriebe korrekt koordiniert werden wirken die erzeugten Kräfte so zusammen, dass eine gezielte Bewegung entsteht.
Sensordaten für die Navigation werden primär von einem oder zwei 2D-Laserscannern erfasst und durch Odometrie (Auswertung der Daten der Fahrantriebe) unterstützt.
Mögliche Kollisionen zwischen der Plattform und Personen oder Hindernissen werden mit den Laserscannern frühzeitig erkannt. Die Laserscanner können außerdem dazu genutzt werden, die nähere Umgebung des Roboters zu überwachen und bei gefährlicher Nähe zu einem Hindernis oder einer Person den Roboter in den Not-Halt zu versetzen.
Als Bedienschnittstellen bietet die Plattform einen Joystick für die Fernsteuerung des Roboters. Das LC-Display im hinteren Bereich der Plattform stellt die wichtigsten Informationen zum aktuellen Status des Roboters dar.
Abb. 5: Komponenten-Diagramm des MPO-700
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 20 von 31
8 Technische Daten
8.1 Mechanische Eigenschaften
Abmessungen
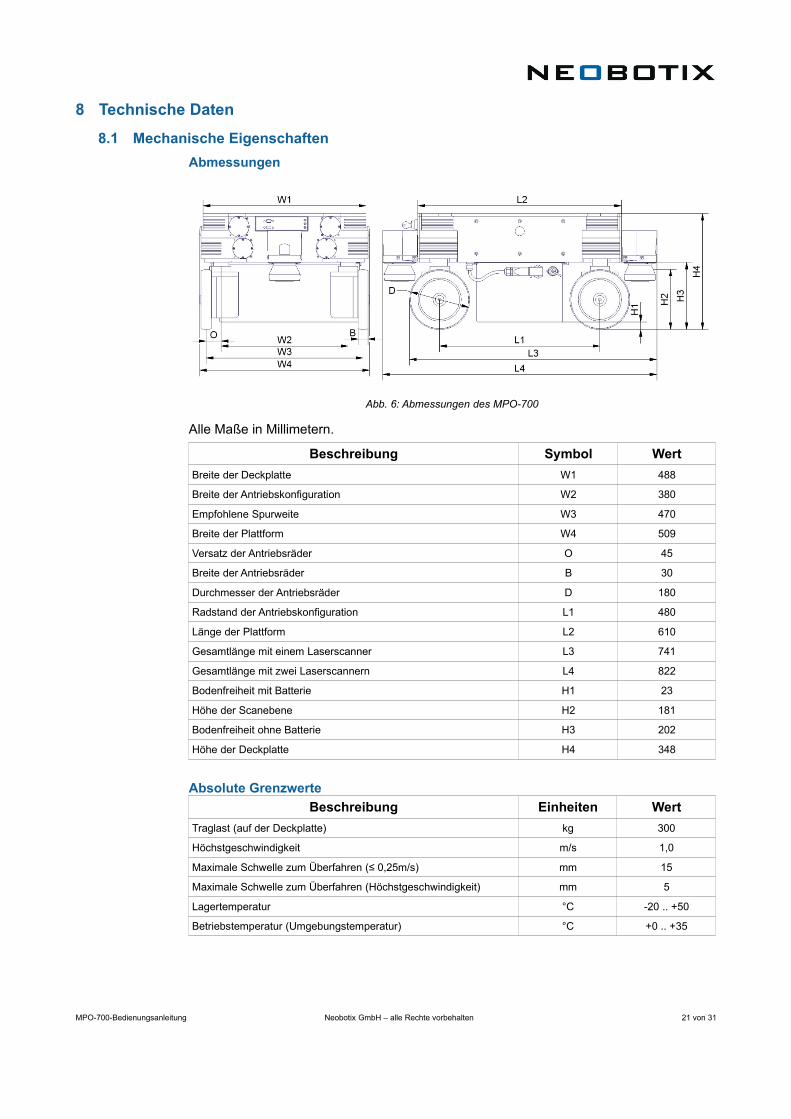
Abb. 6: Abmessungen des MPO-700
Alle Maße in Millimetern.
Beschreibung Symbol Wert
Breite der Deckplatte W1 488
Breite der Antriebskonfiguration W2 380
Empfohlene Spurweite W3 470
Breite der Plattform W4 509
Versatz der Antriebsräder O 45
Breite der Antriebsräder B 30
Durchmesser der Antriebsräder D 180
Radstand der Antriebskonfiguration L1 480
Länge der Plattform L2 610
Gesamtlänge mit einem Laserscanner L3 741
Gesamtlänge mit zwei Laserscannern L4 822
Bodenfreiheit mit Batterie H1 23
Höhe der Scanebene H2 181
Bodenfreiheit ohne Batterie H3 202
Höhe der Deckplatte H4 348
Absolute Grenzwerte
Beschreibung Einheiten Wert
Traglast (auf der Deckplatte) kg 300
Höchstgeschwindigkeit m/s 1,0
Maximale Schwelle zum Überfahren (≤ 0,25m/s) mm 15
Maximale Schwelle zum Überfahren (Höchstgeschwindigkeit) mm 5
Lagertemperatur °C -20 .. +50
Betriebstemperatur (Umgebungstemperatur) °C +0 .. +35
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 21 von 31
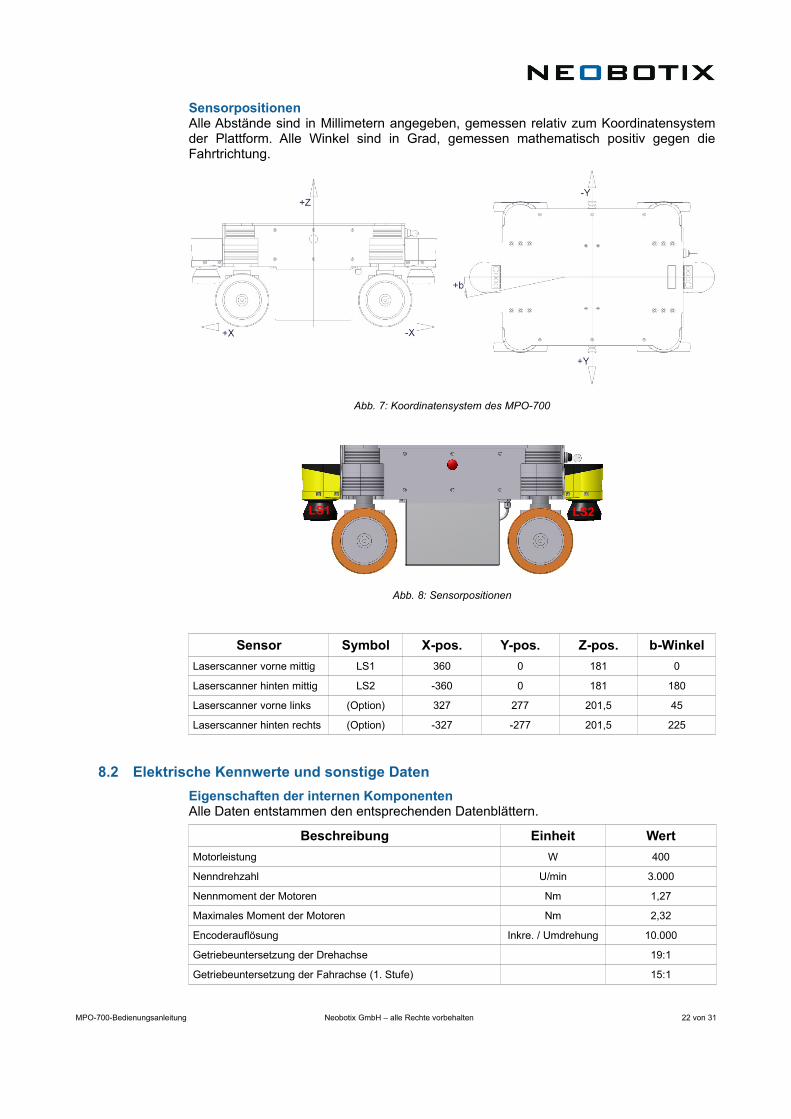
SensorpositionenAlle Abstände sind in Millimetern angegeben, gemessen relativ zum Koordinatensystem der Plattform. Alle Winkel sind in Grad, gemessen mathematisch positiv gegen die Fahrtrichtung.
Abb. 7: Koordinatensystem des MPO-700
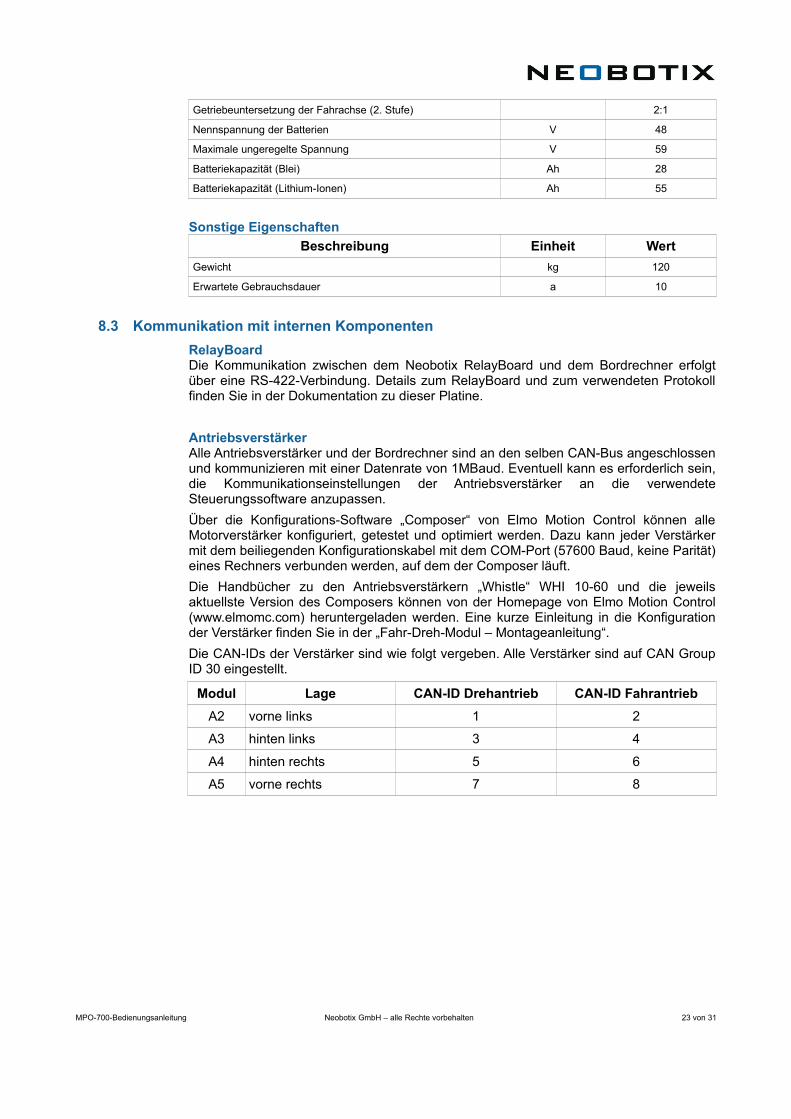
Abb. 8: Sensorpositionen
Sensor Symbol X-pos. Y-pos. Z-pos. b-Winkel
Laserscanner vorne mittig LS1 360 0 181 0
Laserscanner hinten mittig LS2 -360 0 181 180
Laserscanner vorne links (Option) 327 277 201,5 45
Laserscanner hinten rechts (Option) -327 -277 201,5 225
8.2 Elektrische Kennwerte und sonstige Daten
Eigenschaften der internen KomponentenAlle Daten entstammen den entsprechenden Datenblättern.
Beschreibung Einheit Wert
Motorleistung W 400
Nenndrehzahl U/min 3.000
Nennmoment der Motoren Nm 1,27
Maximales Moment der Motoren Nm 2,32
Encoderauflösung Inkre. / Umdrehung 10.000
Getriebeuntersetzung der Drehachse 19:1
Getriebeuntersetzung der Fahrachse (1. Stufe) 15:1
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 22 von 31
LS1 LS2
Getriebeuntersetzung der Fahrachse (2. Stufe) 2:1
Nennspannung der Batterien V 48
Maximale ungeregelte Spannung V 59
Batteriekapazität (Blei) Ah 28
Batteriekapazität (Lithium-Ionen) Ah 55
Sonstige Eigenschaften
Beschreibung Einheit Wert
Gewicht kg 120
Erwartete Gebrauchsdauer a 10
8.3 Kommunikation mit internen Komponenten
RelayBoardDie Kommunikation zwischen dem Neobotix RelayBoard und dem Bordrechner erfolgt über eine RS-422-Verbindung. Details zum RelayBoard und zum verwendeten Protokoll finden Sie in der Dokumentation zu dieser Platine.
AntriebsverstärkerAlle Antriebsverstärker und der Bordrechner sind an den selben CAN-Bus angeschlossen und kommunizieren mit einer Datenrate von 1MBaud. Eventuell kann es erforderlich sein, die Kommunikationseinstellungen der Antriebsverstärker an die verwendete Steuerungssoftware anzupassen.
Über die Konfigurations-Software „Composer“ von Elmo Motion Control können alle Motorverstärker konfiguriert, getestet und optimiert werden. Dazu kann jeder Verstärker mit dem beiliegenden Konfigurationskabel mit dem COM-Port (57600 Baud, keine Parität) eines Rechners verbunden werden, auf dem der Composer läuft.
Die Handbücher zu den Antriebsverstärkern „Whistle“ WHI 10-60 und die jeweils aktuellste Version des Composers können von der Homepage von Elmo Motion Control (www.elmomc.com) heruntergeladen werden. Eine kurze Einleitung in die Konfiguration der Verstärker finden Sie in der „Fahr-Dreh-Modul – Montageanleitung“.
Die CAN-IDs der Verstärker sind wie folgt vergeben. Alle Verstärker sind auf CAN Group ID 30 eingestellt.
Modul Lage CAN-ID Drehantrieb CAN-ID Fahrantrieb
A2 vorne links 1 2
A3 hinten links 3 4
A4 hinten rechts 5 6
A5 vorne rechts 7 8
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 23 von 31
8.4 Verwendete Stecker
TE Connectivity – HE14
Polzahl TE Connectivity Farnell RS Components
3-polig, 1-reihig 281838-3 429582 532-333
4-polig, 1-reihig 281838-4 429594 532-349
5-polig, 1-reihig 281838-5 429600 532-355
6-polig, 2-reihig 281839-3 429650 532-406
8-polig, 2-reihig 281839-4 429661 532-412
10-polig, 2-reihig 281839-5 429673 532-428
12-polig, 2-reihig 281839-6 429685 532-434
Crimpkontakte AWG 28-24 182734-2 429715 532-456
Tabelle 2: Steckverbinder HE14
Molex – Mini-Fit Jr.
Polzahl Molex Farnell RS Components
2-polig 39-01-2020 151866 484-1748
4-polig 39-01-2040 151867 484-1754
6-polig 39-01-2060 151868 484-1760
8-polig 39-01-2080 151869 484-1782
10-polig 39-01-2100 151870 484-1798
16-polig 39-01-2160 4138399 172-9011
Crimpkontakte AWG 24-18 39-00-0039 9732195 172-9134
Tabelle 3: Steckverbinder Mini-Fit Jr.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 24 von 31
9 Das LC-Display
Das Display zeigt ständig den aktuellen Status der Hardware. Dazu können zwei verschiedene Ansichten angezeigt werden.
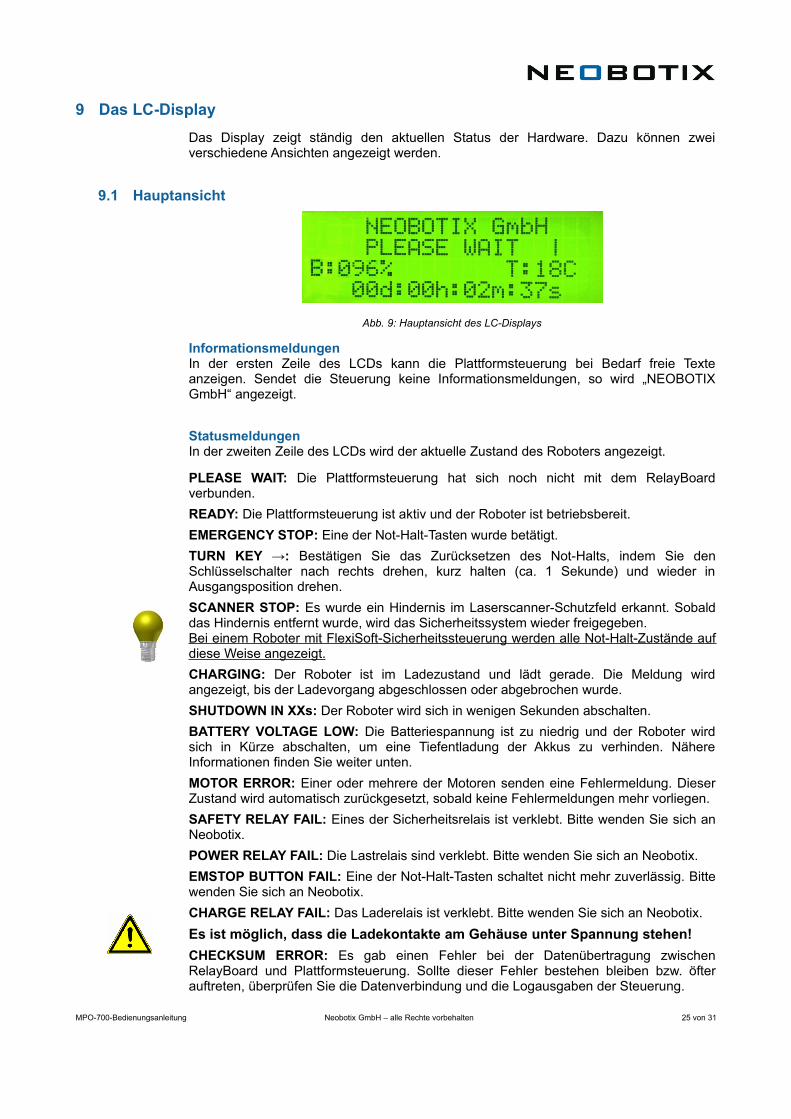
9.1 Hauptansicht
Abb. 9: Hauptansicht des LC-Displays
InformationsmeldungenIn der ersten Zeile des LCDs kann die Plattformsteuerung bei Bedarf freie Texte anzeigen. Sendet die Steuerung keine Informationsmeldungen, so wird „NEOBOTIX GmbH“ angezeigt.
StatusmeldungenIn der zweiten Zeile des LCDs wird der aktuelle Zustand des Roboters angezeigt.
PLEASE WAIT: Die Plattformsteuerung hat sich noch nicht mit dem RelayBoard verbunden.
READY: Die Plattformsteuerung ist aktiv und der Roboter ist betriebsbereit.
EMERGENCY STOP: Eine der Not-Halt-Tasten wurde betätigt.
TURN KEY →: Bestätigen Sie das Zurücksetzen des Not-Halts, indem Sie den Schlüsselschalter nach rechts drehen, kurz halten (ca. 1 Sekunde) und wieder in Ausgangsposition drehen.
SCANNER STOP: Es wurde ein Hindernis im Laserscanner-Schutzfeld erkannt. Sobald das Hindernis entfernt wurde, wird das Sicherheitssystem wieder freigegeben.Bei einem Roboter mit FlexiSoft-Sicherheitssteuerung werden alle Not-Halt-Zustände auf diese Weise angezeigt.
CHARGING: Der Roboter ist im Ladezustand und lädt gerade. Die Meldung wird angezeigt, bis der Ladevorgang abgeschlossen oder abgebrochen wurde.
SHUTDOWN IN XXs: Der Roboter wird sich in wenigen Sekunden abschalten.
BATTERY VOLTAGE LOW: Die Batteriespannung ist zu niedrig und der Roboter wird sich in Kürze abschalten, um eine Tiefentladung der Akkus zu verhinden. Nähere Informationen finden Sie weiter unten.
MOTOR ERROR: Einer oder mehrere der Motoren senden eine Fehlermeldung. Dieser Zustand wird automatisch zurückgesetzt, sobald keine Fehlermeldungen mehr vorliegen.
SAFETY RELAY FAIL: Eines der Sicherheitsrelais ist verklebt. Bitte wenden Sie sich an Neobotix.
POWER RELAY FAIL: Die Lastrelais sind verklebt. Bitte wenden Sie sich an Neobotix.
EMSTOP BUTTON FAIL: Eine der Not-Halt-Tasten schaltet nicht mehr zuverlässig. Bitte wenden Sie sich an Neobotix.
CHARGE RELAY FAIL: Das Laderelais ist verklebt. Bitte wenden Sie sich an Neobotix.
Es ist möglich, dass die Ladekontakte am Gehäuse unter Spannung stehen!
CHECKSUM ERROR: Es gab einen Fehler bei der Datenübertragung zwischen RelayBoard und Plattformsteuerung. Sollte dieser Fehler bestehen bleiben bzw. öfter auftreten, überprüfen Sie die Datenverbindung und die Logausgaben der Steuerung.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 25 von 31
Ladezustand
B:096%Zeigt den aktuellen Ladestand der Batterie an. Die auftretenden Spannungsbereiche sind wie folgt:
Nennspannung Schutzabschaltung Arbeitsbereich Ladevorgang
24V ≤ 22V 23V .. 25V 25V .. 29V
48V ≤ 44V 46V .. 52V 52V .. 58V
Tabelle 4: Spannungen verschiedener Batterien
Temperaturanzeige
T:20CHier wird die direkt am RelayBoard gemessene Temperatur angezeigt.
Laufzeitanzeige
00d:00h:02m:37sIn der letzten Zeile wird die bisherige Laufzeit des Roboters, in Tagen, Stunden, Minuten und Sekunden, seit dem letzten Einschalten angezeigt.
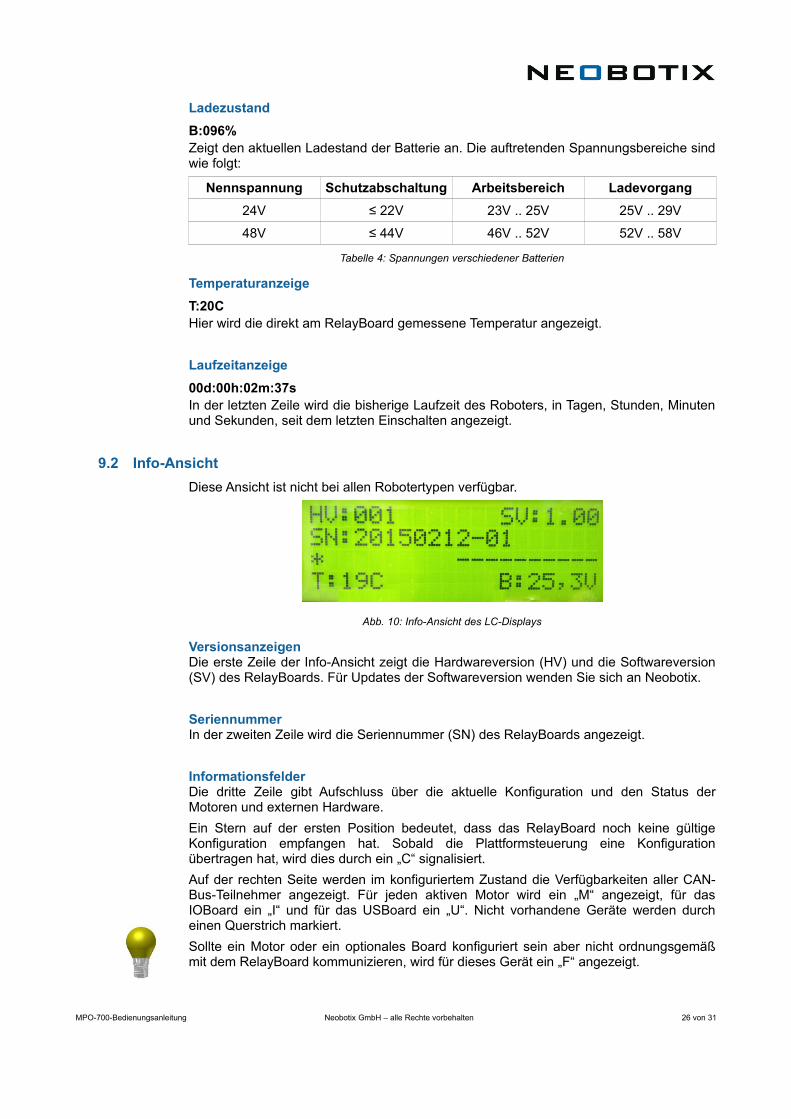
9.2 Info-Ansicht
Diese Ansicht ist nicht bei allen Robotertypen verfügbar.
Abb. 10: Info-Ansicht des LC-Displays
VersionsanzeigenDie erste Zeile der Info-Ansicht zeigt die Hardwareversion (HV) und die Softwareversion (SV) des RelayBoards. Für Updates der Softwareversion wenden Sie sich an Neobotix.
SeriennummerIn der zweiten Zeile wird die Seriennummer (SN) des RelayBoards angezeigt.
InformationsfelderDie dritte Zeile gibt Aufschluss über die aktuelle Konfiguration und den Status der Motoren und externen Hardware.
Ein Stern auf der ersten Position bedeutet, dass das RelayBoard noch keine gültige Konfiguration empfangen hat. Sobald die Plattformsteuerung eine Konfiguration übertragen hat, wird dies durch ein „C“ signalisiert.
Auf der rechten Seite werden im konfiguriertem Zustand die Verfügbarkeiten aller CAN-Bus-Teilnehmer angezeigt. Für jeden aktiven Motor wird ein „M“ angezeigt, für das IOBoard ein „I“ und für das USBoard ein „U“. Nicht vorhandene Geräte werden durch einen Querstrich markiert.
Sollte ein Motor oder ein optionales Board konfiguriert sein aber nicht ordnungsgemäß mit dem RelayBoard kommunizieren, wird für dieses Gerät ein „F“ angezeigt.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 26 von 31
10 Wartung
10.1 Allgemeine Wartungshinweise
Die Wartung des MPO-700 ist sehr einfach und schnell durchzuführen. So lange die Hinweise dieses Kapitels im Gedächtnis behalten und der Roboter entsprechend behandelt wird, sind keine größeren Arbeiten notwendig.
Bitte beachten Sie die folgenden Punkte:
Halten Sie den Roboter stets sauber. Staub und Schmutz können die bewegten Teile, insbesondere die Kugellager, beschädigen und die Lebensdauer herabsetzen. Metallspäne und metallische Objekte können im Inneren des Roboters zu Kurzschlüssen führen.
Prüfen Sie regelmäßig alle elektrischen Verbindungen, vor allem die Hochstromstecker, auf Zeichen von Verschleiß und auf gelöste Verbindungen.
Trennen und verbinden Sie keine Stecker unter Last. Schalten Sie den Roboter immer vollständig aus, ehe Sie die elektrischen Verbindungen verändern.
Schalten Sie den Roboter immer komplett aus und trennen Sie ihn von der Batterie und allen anderen Stromquellen, bevor Sie mit Arbeiten am Roboter beginnen. Bei Arbeiten am unter Spannung stehenden Roboter besteht die Gefahr schwerer Verletzungen und / oder Schäden!
10.2 Fahr-Dreh-Module
Bitte beachten Sie die folgenden Hinweise, um die Leistungsfähigkeit der omnidirektionalen Plattform zu erhalten und ihre Lebensdauer zu maximieren:
Behandeln Sie die mobile Plattform immer sorgsam. Überladen Sie die Plattform nicht, setzen Sie sie nicht auf ungeeigneten Untergründen ein, lassen Sie die Plattform nicht fallen oder hart aufsetzen und fahren Sie keine Absätze oder Stufen hinunter.
Halten Sie sowohl die mechanischen als auch die elektrischen Bauteile sauber. Schmutz auf beweglichen Teilen, vor allem den Dichtungen der Kugellager, führt zu erhöhtem Verschleiß und einer verringerten Lebensdauer.
Eine fehlerhafte Steuerungssoftware oder eine unzureichende Ausrichtung und Synchronisation der Antriebe kann zu erheblichen Schäden führen.
Prüfen Sie die Fahr-Dreh-Module regelmäßig auf gleichmäßigen Lauf und ein konstantes, weiches Betriebsgeräusch.
Falls die Standardeinstellungen der Antriebe nicht den Anforderungen spezieller Anwendungen entsprechen, können sie individuell angepasst werden. Außerdem kann es vorkommen, dass sich das Fahrverhalten der Antriebe nach einiger Zeit ändert, wenn sich zum Beispiel die Getriebe durch besonders große Belastung übermäßig eingelaufen haben. Mit der Konfigurationssoftware Composer von Elmo Motion Control (www.elmomc.com) können die Einstellungen angepasst werden. Bitte kontaktieren Sie Neobotix, ehe Sie mit solchen Arbeiten an den Verstärkern beginnen.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 27 von 31
10.3 Sicherungen
Der mobile Roboter besitzt die folgenden Sicherungen:
ID Kreis Lage Typ Nennstrom Charakt.
F1 Batterieanschluss Neben Batterieanschl. Flachsich. 15A Standard
F2 48V-Verteilung Hutschiene Flachsich. 5A Standard
F1' 48V-Verteilung RelayBoard Feins. 5x20 3A träge
F3 Not-Halt-Tasten RelayBoard Feins. 5x20 2A flink
10.4 Batteriewechsel
Bevor die Batterie gewechselt werden kann, muss zuerst der Bordrechner heruntergefahren und der Roboter ausgeschaltet werden. Falls die Lithium-Ionen-Batterie verwendet wird, sollte sie anschließend ebenfalls deaktiviert werden.
Erst danach darf der Batteriestecker getrennt werden. Nun kann die Batterie langsam zur Seite aus den Tragschienen herausgeschoben werden.
Achten Sie darauf, dass die Batterie nicht nach unten fällt, sobald das Ende der Tragschienen erreicht ist.
Die neue Batterie kann dann mit den gleichen Schritten in umgekehrter Reihenfolge eingebaut werden. Achten Sie dabei darauf, dass die Lithium-Ionen-Batterie, falls sie verwendet wird, vor dem Einbau ausgeschaltet ist.
10.5 Laden der Batterie
Blei-BatterieDie Standardbatterie des MPO-700 besteht aus vier in Reihe geschalteten Blei-Akkus. Dieses Batteriepack kann mit dem mitgelieferten Batterieladegerät bequem und sicher geladen werden. Stecken Sie zuerst das Ladegerät an die seitliche Ladebuchse der Batterie an und schalten Sie erst danach das Ladegerät ein. Nachdem die Batterie voll geladen wurde, muss zuerst das Ladegerät ausgeschaltet werden und erst danach darf es von der Batterie getrennt werden.
Trennen bzw. verbinden Sie nie Ladegerät und Batterie, solange das Ladegerät eingeschaltet ist. Durch die entstehenden Lichtbögen kann es zu erheblichem Verschleiß an den Kontakten kommen. Außerdem könnten die Batterie oder elektrische Komponenten Schaden nehmen.
Bitte beachten Sie auch die Hinweise in der zu Ihrem jeweiligen Ladegerät gehörenden Dokumentation.
Die Batterie des MPO-700 verfügt über genug Kapazität für ca. fünf Stunden Betrieb.
Abhängig von Einsatzdauer und Alter nimmt die Kapazität jedoch mit der Zeit ab, bis sie (nach circa 1000 Ladezyklen bzw. etwa zwei Jahren) nicht mehr für den gewünschten Betrieb des Roboters ausreicht.
Um die Lebensdauer der Batterien zu maximieren, sollten einige Punkte beachtet werden:
– Schließen Sie den Roboter möglichst oft ans Ladegerät an.
– Vermeiden Sie ein Tiefentladen der Batterien oder das Erreichen der Unterspannungsabschaltung.
– Laden Sie den Roboter auch, wenn er einige Zeit nur im Stand-By betrieben wird (zum Beispiel während des Programmierens).
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 28 von 31
– Lassen Sie den Roboter nach Möglichkeit nicht länger mit entladenen Batterien stehen.
Blei-Akkus in AGM-Technik sind im Allgemeinen sehr gutmütig und deutlich ungefährlicher als beispielsweise Lithium-Ionen-Akkus. Trotzdem kann es durch Überalterung, Hitze oder falsche Behandlung zu Schäden kommen.
Prüfen Sie deshalb regelmäßig, spätestens einmal im Monat, den Zustand der Batterien! Folgende Anzeichen deuten auf Batterieschäden hin:
– Verformung oder Ausdehnung des Batteriekörpers
– Weiße oder bräunliche Flecken an den Batteriepolen oder anderen Metallteilen
– Hitzeentwicklung
– Starker Schwefelgeruch
– Flüssigkeit unter den Batterien
Sobald Sie Schäden an den Akkus bemerken, dürfen diese nicht weiter verwendet und keinesfalls geladen werden!
Bitte wenden Sie sich in einem solchen Fall umgehend an Neobotix.
Im Kapitel „Entsorgung“ finden Sie Informationen zum Recycling von Altbatterien.
Lithium-Ionen-BatterieBitte beachten Sie die folgenden Hinweise, um die Leistungsfähigkeit und Lebensdauer der Lithium-Ionen-Batterie zu erhalten:
Behandeln Sie die Batterie besonders pfleglich. Lassen Sie die Batterie nicht fallen und vermeiden Sie Hitze oder direktes Sonnenlicht.
Versuchen Sie, möglichst vollständige Lade-Entlade-Zyklen zu fahren. Dadurch bleibt die Kapazität des Akkus länger erhalten. Häufiges teilweises Wiederaufladen schadet auf lange Sicht den Zellen.
Trennen Sie die Batterie vom Roboter solange der Roboter nur stationär eingesetzt wird, etwa beim Programmieren, und verwenden Sie stattdessen das Netzteil als Energieversorgung. Dadurch können Mikroladezyklen vermieden werden.
Stellen Sie das mitgelieferter Netzteil zum Laden auf eine Spannung von 52V und einen maximalen Strom von 10A. Nutzen Sie am besten das gespeicherte Programm P1 und den Modus Preset, um sicherzugehen, dass die richtigen Einstellungen verwendet werden.
Trennen bzw. verbinden Sie nie Netzteil und Batterie, solange das Netzteil eingeschaltet ist. Durch die entstehenden Lichtbögen kommt es zu erheblichem Verschleiß an den Kontakten. Außerdem könnten die Batterie oder elektrische Komponenten Schaden nehmen.
Die Batterie ist voll geladen, sobald der Ladestrom unter 0,5A gesunken ist.
Die Batterie muss aktiviert werden, ehe sie geladen werden kann. Verwenden Sie entweder den Wippschalter an der Batterie selbst oder die entsprechenden Kontakte des Batteriesteckers, um die Batterie zu aktivieren. Die Steckerbelegung finden Sie im Elektroschaltplan des Roboters.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 29 von 31
11 Entsorgung
11.1 Demontage
Wenn der MPO-700 außer Dienst gestellt wird, sollte er zerlegt und seine Komponenten recycelt werden.
Bevor der Roboter zerlegt werden kann, müssen das Ladegerät und alle anderen Stromzuführungen vom Roboter getrennt und die Batterie entfernt werden.Anschließend sollte für mindestens 30 Minuten nicht am Roboter gearbeitet werden, damit sich eventuell noch vorhandene Spannungen entladen können.
Die Demontage des MPO-700 sollte nur durch qualifizierte Techniker erfolgen, vorzugsweise durch jemanden, der bereits mit dem Roboter gearbeitet hat und die technischen Details kennt. Dies garantiert:
Eine schnelle und problemlose Demontage
Eine geringere Gefahr von Verletzungen oder Schäden an Bauteilen, die weiterverwendet werden sollen
Eine ordnungsgemäße Trennung der Komponenten entsprechend ihrem Material und Recyclingverfahren
11.2 Recycling
Wiederverwendbare KomponentenViele der Komponenten im MPO-700 (z. B. die Motoren, die Antriebsverstärker und der Bordrechner) können vermutlich noch problemlos in anderen Systemen genutzt werden wenn der Roboter das Ende seiner Verwendung erreicht hat. Bitte prüfen Sie sorgfältig, welche Komponenten unmittelbar oder später weiterverwendet werden können und entfernen Sie diese Komponenten besonders sorgfältig.
Das Wiederverwenden von Komponenten schont nicht nur Ressourcen und hilft der Umwelt, sondern spart auch erhebliche Kosten.
Mechanische BauteileDer gesamte Innenrahmen und die Fahr-Dreh-Module des MPO-700 bestehen überwiegend aus Aluminiumteilen und Verbindungselementen aus Stahl. Nur die Schneckenräder bestehen aus einer Messinglegierung. Alle diese Materialien sollten vollständig getrennt an entsprechend zertifizierte Altmetallverwerter verkauft werden.
Elektrische KomponentenElektronikschrott und alte Kabel enthalten nicht nur wertvolle Rohstoffe, sondern stellen auch eine ernste Gefahr für die Umwelt dar.
Sie dürfen nicht als Restmüll behandelt werden, sondern müssen gemäß den gesetzlichen Vorschriften bei geeigneten Verwertungsbetrieben abgegeben oder verkauft werden.
BatterienIn der Standardbatterie des MPO-700 sind vier Blei-Vlies-Batterien (AGM) verbaut.
Diese Batterien dürfen ausschließlich bei den gesetzlich zugelassenen Annahmestellen abgegeben werden.
Falls keine qualifizierte Annahmestelle für die Lithium-Ionen-Batterie erreichbar ist, kann diese auch an den Hersteller zurückgegeben werden.
Die Lithium-Ionen-Batterie darf weder geöffnet noch zerlegt werden und muss als Gefahrgut der Klasse 9 behandelt und transportiert werden.
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 30 von 31
12 Rechtliche Anmerkungen
VersionsinformationDas vorliegende Dokument ist das Original.
HaftungDieses Dokument wurde mit größtmöglicher Sorgfalt verfasst und repräsentiert den Stand der Technik zum Zeitpunkt seiner Erstellung. Fehler und Irrtümer sind jedoch nicht auszuschließen. Bitte informieren Sie Neobotix, sollten Sie solche im Dokument bemerken.
Die Neobotix GmbH ist nicht haftbar für technische oder schriftliche Fehler in diesem Dokument und behält sich das Recht vor, Änderungen seines Inhalts vorzunehmen, ohne diese vorher anzukündigen.
Neobotix übernimmt keinerlei Garantie für die in diesem Dokument beschriebenen Produkteigenschaften. Insbesondere ergibt sich aus dem Inhalt kein Anspruch jedweder Art, weder auf Eigenschaften des Produkts noch auf seine Eignung für spezielle Anwendungsfälle.
Die Neobotix GmbH kann nicht für Schäden haftbar gemacht werden, die aus der unsachgemäßen Nutzung eines oder mehrerer der beschriebenen Produkte resultieren.
CE-KonformitätserklärungHiermit bestätigt Neobotix, dass das beschriebene Produkt die relevanten EU-Richtlinien erfüllt. Falls weitergehende Informationen erforderlich sind, wenden Sie sich bitte direkt an Neobotix.
Downloads und weitergehende InformationenWeitergehende Informationen, Datenblätter und Dokumentationen, auch von weiteren Neobotix-Produkten, finden Sie im Internet unter www.neobotix-roboter.de.
ImpressumNeobotix GmbH
Weipertstraße 8 – 10, 74076 Heilbronn
www.neobotix-roboter.de
Kontakt: Dipl.-Ing. Till May
Tel.: (+49) 7131 / 76 69-300
E-Mail: [email protected]
MPO-700-Bedienungsanleitung.odm, erstellt am 23. April 2018 in Heilbronn
MPO-700-Bedienungsanleitung Neobotix GmbH – alle Rechte vorbehalten 31 von 31

















