Mond, Mars und Asteroiden – die Erkundung mit robotischen Mitteln Dr. Bernd Schäfer Koordinator Planetare Robotische Exploration Robotik und Mechatronik Zentrum DLR - Deutsches Zentrum für Luft- und Raumfahrt e.V. Oberpfaffenhofen, 82234 Weßling
Transcript
Mond, Mars und Asteroiden –die Erkundung mit robotischen Mitteln
Dr. Bernd Schäfer
Koordinator Planetare Robotische ExplorationRobotik und Mechatronik Zentrum
DLR - Deutsches Zentrum für Luft- und Raumfahrt e.V.Oberpfaffenhofen, 82234 Weßling
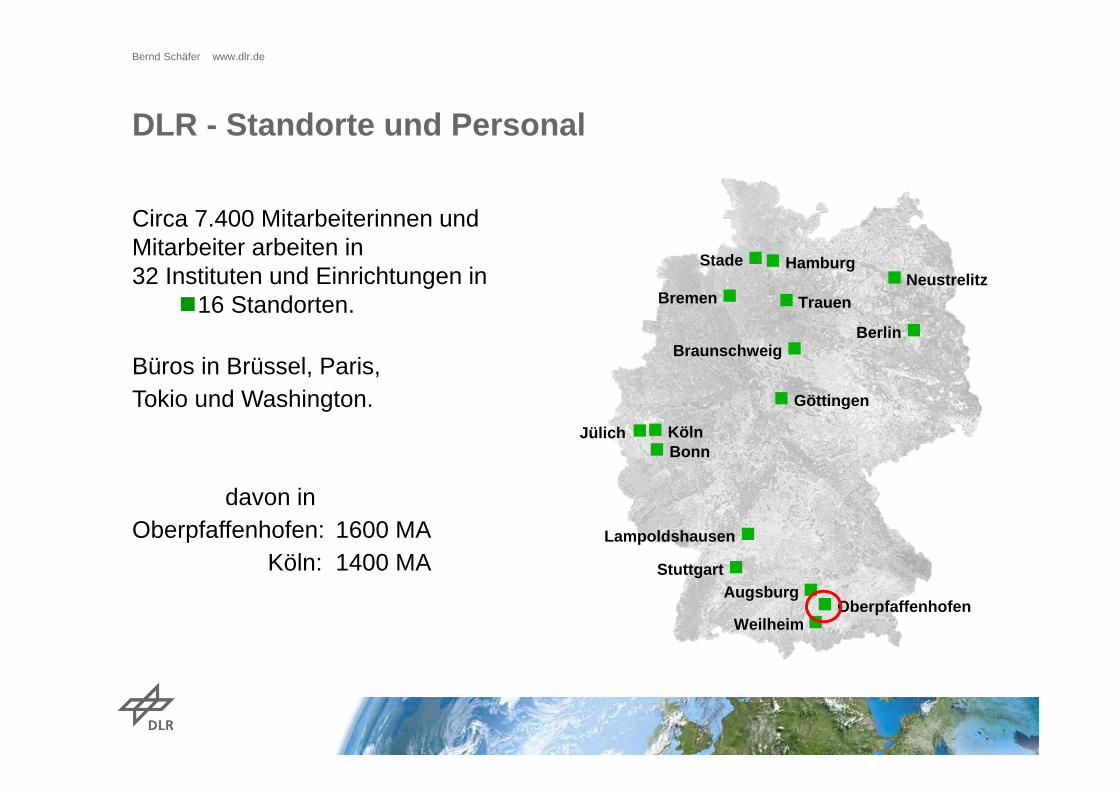
DLR - Standorte und Personal
Circa 7.400 Mitarbeiterinnen und Mitarbeiter arbeiten in 32 Instituten und Einrichtungen in
16 Standorten.
Büros in Brüssel, Paris, Tokio und Washington.
davon inOberpfaffenhofen: 1600 MA
Köln: 1400 MA
Köln
Oberpfaffenhofen
Braunschweig
Göttingen
Berlin
Bonn
Neustrelitz
Weilheim
Bremen Trauen
Lampoldshausen
Hamburg
Stuttgart
Stade
Augsburg
Jülich
Bernd Schäfer www.dlr.de
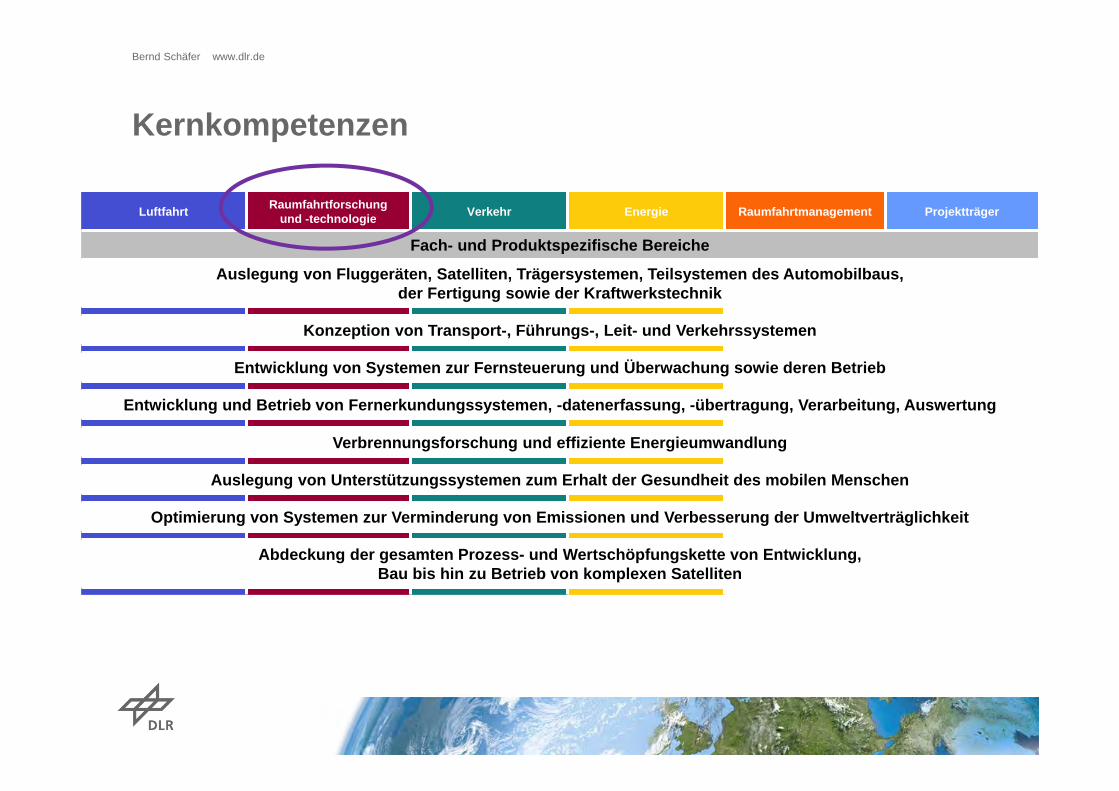
Kernkompetenzen
Luftfahrt Raumfahrtforschung und -technologie Verkehr Energie Raumfahrtmanagement Projektträger
Fach- und Produktspezifische Bereiche
Auslegung von Fluggeräten, Satelliten, Trägersystemen, Teilsystemen des Automobilbaus, der Fertigung sowie der Kraftwerkstechnik
Konzeption von Transport-, Führungs-, Leit- und Verkehrssystemen
Entwicklung von Systemen zur Fernsteuerung und Überwachung sowie deren Betrieb
Entwicklung und Betrieb von Fernerkundungssystemen, -datenerfassung, -übertragung, Verarbeitung, Auswertung
Verbrennungsforschung und effiziente Energieumwandlung
Auslegung von Unterstützungssystemen zum Erhalt der Gesundheit des mobilen Menschen
Optimierung von Systemen zur Verminderung von Emissionen und Verbesserung der Umweltverträglichkeit
Abdeckung der gesamten Prozess- und Wertschöpfungskette von Entwicklung, Bau bis hin zu Betrieb von komplexen Satelliten
Bernd Schäfer www.dlr.de
• Erfolg in der programmorientierten Förderung• Mehrwert aus der Unterstützung der Helmholtz-Gemeinschaft• Mitgestalten des Organisationsentwicklungsprozesses
Mitwirkung in der Helmholtz-Gemeinschaft
Bernd Schäfer www.dlr.de
DLR Forschungsbereich Raumfahrtforschung und -technologie
• Erforschung des Weltraums• Forschung unter Schwerelosigkeit• Erdbeobachtung• Kommunikation & Navigation• Raumtransport• Technik für Raumfahrtsysteme
Bernd Schäfer www.dlr.de
DLR Raumfahrtforschung und -technologie –Erforschung des WeltraumsFokus:• Erforschung des Sonnensystems• Suche nach extrasolaren Planeten Highlights:• Mars Express: hochauflösende
Vermessung der Mars-Oberfläche• Venus Express: Atmosphärenforschung
der Venus• Cassini – Erkundung von Saturn und
seiner Monde• COROT – Suche nach extrasolaren
Planeten• Dawn: NASA Asteroiden-Mission • Rosetta: ESA Kometen-LandemissionPerspektive:• “Mission to Mars” – ExoMars• Beteiligung an Mondmissionen (national,
europäisch oder international)
Bernd Schäfer www.dlr.de
Bernd Schäfer www.dlr.de
Himmelskörper in unserem Sonnensystem
Große Objekte
Monde (Auswahl)
Bernd Schäfer www.dlr.de
NASA Mars Science Laboratory (MSL): ‘Curiosity‘Bernd Schäfer www.dlr.de
Movie
Bernd Schäfer www.dlr.de
Bernd Schäfer www.dlr.de
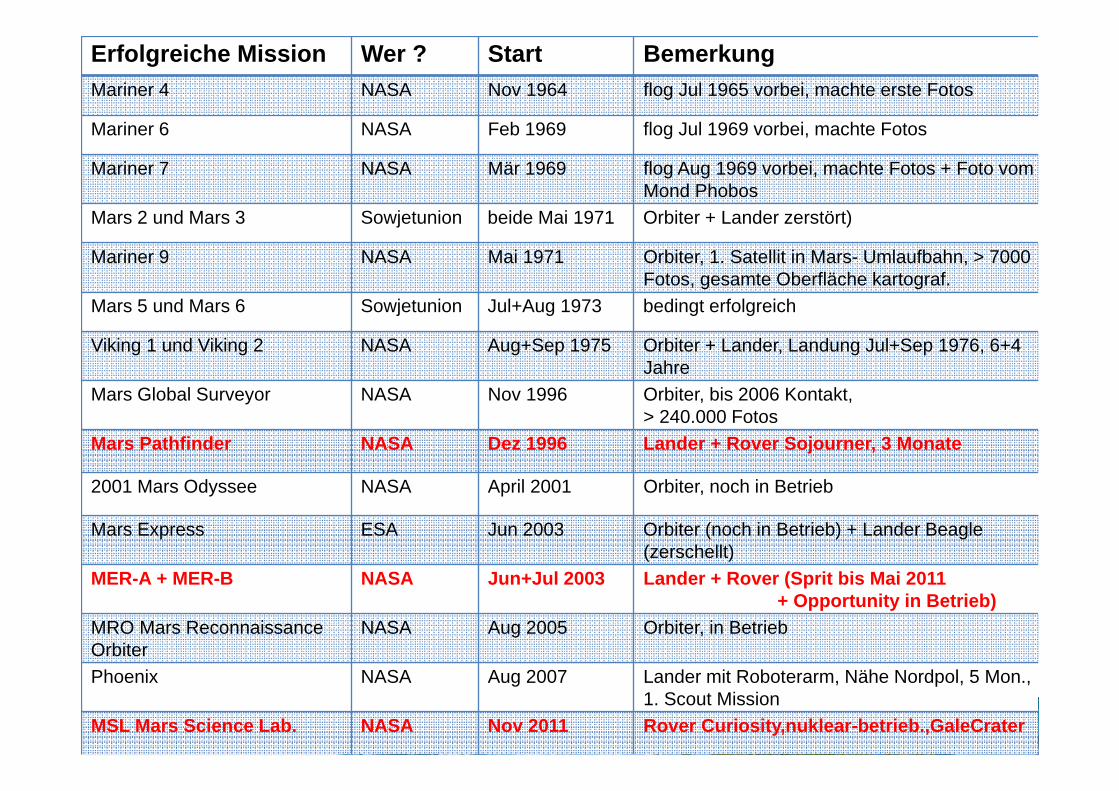
Bernd Schäfer www.dlr.de Robotische Marsexploration • 24 Oktober 2013 • VDE/VDI Ulm Folie 12Erfolgreiche Mission Wer ? Start BemerkungMariner 4 NASA Nov 1964 flog Jul 1965 vorbei, machte erste Fotos
Mariner 6 NASA Feb 1969 flog Jul 1969 vorbei, machte Fotos
Mariner 7 NASA Mär 1969 flog Aug 1969 vorbei, machte Fotos + Foto vom Mond Phobos
Mars 2 und Mars 3 Sowjetunion beide Mai 1971 Orbiter + Lander zerstört)
Mariner 9 NASA Mai 1971 Orbiter, 1. Satellit in Mars- Umlaufbahn, > 7000 Fotos, gesamte Oberfläche kartograf.
Mars 5 und Mars 6 Sowjetunion Jul+Aug 1973 bedingt erfolgreich
Viking 1 und Viking 2 NASA Aug+Sep 1975 Orbiter + Lander, Landung Jul+Sep 1976, 6+4 Jahre
Mars Global Surveyor NASA Nov 1996 Orbiter, bis 2006 Kontakt, > 240.000 Fotos
Mars Pathfinder NASA Dez 1996 Lander + Rover Sojourner, 3 Monate
2001 Mars Odyssee NASA April 2001 Orbiter, noch in Betrieb
Mars Express ESA Jun 2003 Orbiter (noch in Betrieb) + Lander Beagle (zerschellt)
MER-A + MER-B NASA Jun+Jul 2003 Lander + Rover (Sprit bis Mai 2011+ Opportunity in Betrieb)
MRO Mars ReconnaissanceOrbiter
NASA Aug 2005 Orbiter, in Betrieb
Phoenix NASA Aug 2007 Lander mit Roboterarm, Nähe Nordpol, 5 Mon., 1. Scout Mission
MSL Mars Science Lab. NASA Nov 2011 Rover Curiosity,nuklear-betrieb.,GaleCrater
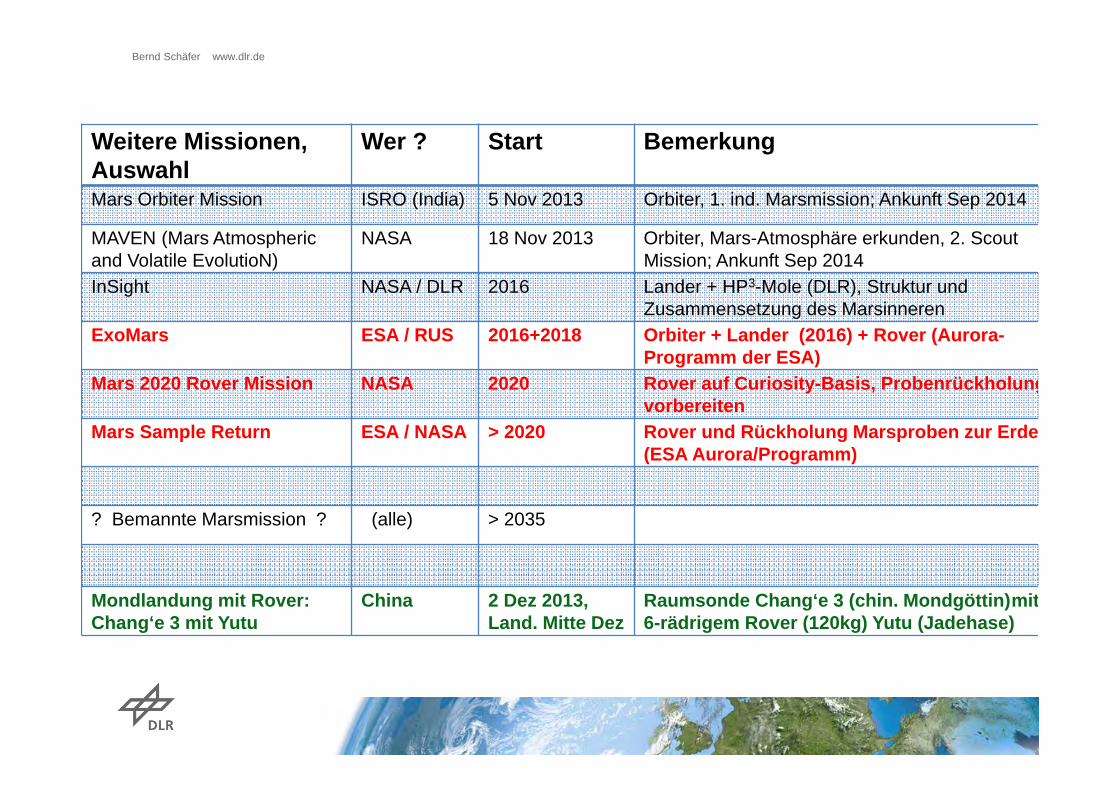
Weitere Missionen, Auswahl
Wer ? Start Bemerkung
Mars Orbiter Mission ISRO (India) 5 Nov 2013 Orbiter, 1. ind. Marsmission; Ankunft Sep 2014
MAVEN (Mars Atmosphericand Volatile EvolutioN)
NASA 18 Nov 2013 Orbiter, Mars-Atmosphäre erkunden, 2. Scout Mission; Ankunft Sep 2014
InSight NASA / DLR 2016 Lander + HP3-Mole (DLR), Struktur und Zusammensetzung des Marsinneren
ExoMars ESA / RUS 2016+2018 Orbiter + Lander (2016) + Rover (Aurora-Programm der ESA)
Mars 2020 Rover Mission NASA 2020 Rover auf Curiosity-Basis, Probenrückholungvorbereiten
Mars Sample Return ESA / NASA > 2020 Rover und Rückholung Marsproben zur Erde (ESA Aurora/Programm)
Erde Mond MarsGroße Halbachse 1 AE (150 Mio km) 384 000 km 1,524 AEUmlaufzeit Sonne(siderisch)
365 Tage 687 Tage = 22,6 Erdmonate
Rotation 23 h 56 min 4,1 s 27,32 Tage 24 h 37 min 22 sFallbeschleunigung 9,81 m/s2 = 1 g 0,165 g (~ 1/6 g) 0,376 g (~ 1/3 g)Temperatur oC(min/mittel/max)
-89 / +15 / +58 -160 … +130 -133 / -55 / +27
DruckAtmosphäre
1,014 barN2 78% + O2 21%
0keine
6 mbarCO2 95%
Bernd Schäfer www.dlr.de
Mars Express (ESA): Dez 2003: Orbiter (300km / 11.000 km, i=86o)
Explorations-Technologien für Mond, Mars oder andere Himmelskörper in unserem
Sonnensystem:
DLR’s Robotik und Mechatronik Zentrumist mit Herz und Seele dabei.
Bernd Schäfer www.dlr.de
DLR RMCRobotik und Mechatronik Zentrum
Technologische Entwicklungen -wie wir beitragen zur Exploration
Bernd Schäfer www.dlr.de
ManipulationPositioning and deployment of scientificinstruments on planetary surface;Acquisition, transport and handover of soilsamples, for processing on rover;Set‐up and assembly of modules Build a base station;Inspection
MobilitätNot only wheels: also legs, legs + wheels, hybrids, …
Localisation und Navigation, Autonomie und Perzeption:DTM / DEM: 3D‐Mapping of environment based on stereo cameras, accomodatedon rover and on orbiterVisual odometry SGM algorithm(Semi‐Global Matching)
Robotics based HRSC planetaryprocessing based on innovative
SGM image processing
Bernd Schäfer www.dlr.de
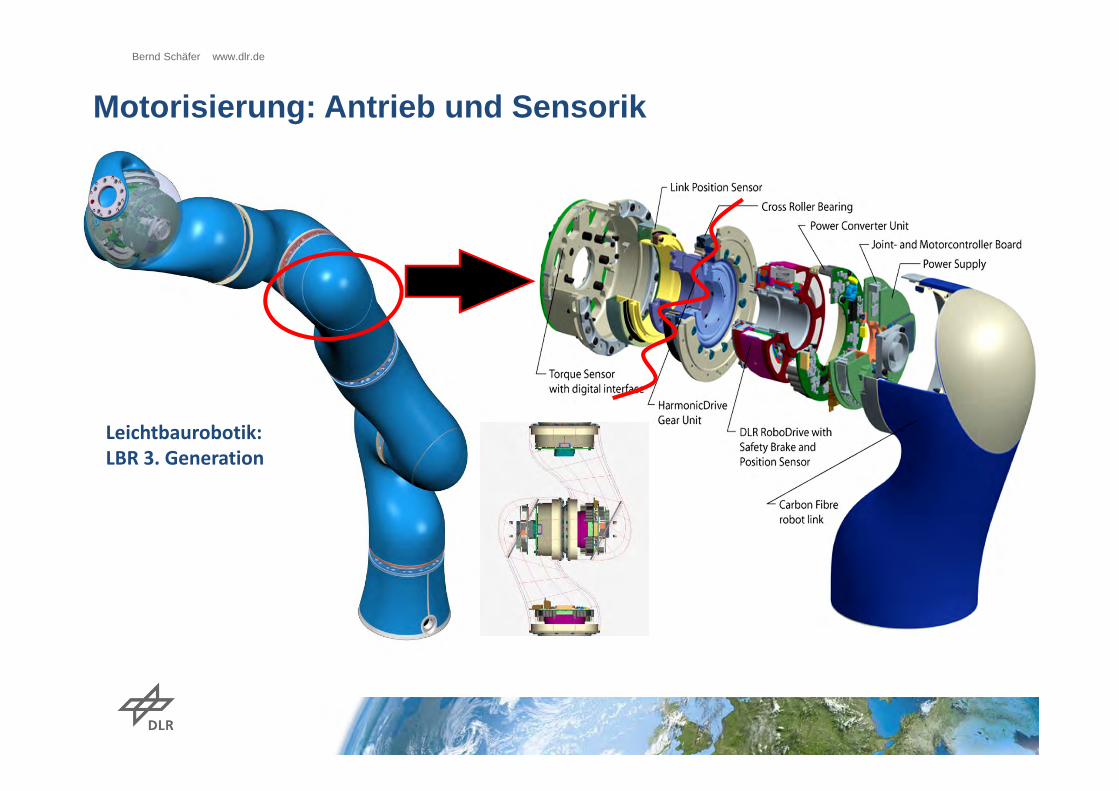
Leichtbaurobotik:LBR 3. Generation
Motorisierung: Antrieb und Sensorik
Bernd Schäfer www.dlr.de
DLR / SAH / HIT - 2007/08DEXHAND – Raumfahrt qualifizierbare geschickte (Dextrous) Hand (ESA)
Bernd Schäfer www.dlr.de Robotische Marsexploration • 24 Oktober 2013 • VDE/VDI Ulm Folie 22Hände für die Servicerobotik – 4 und 5 Finger
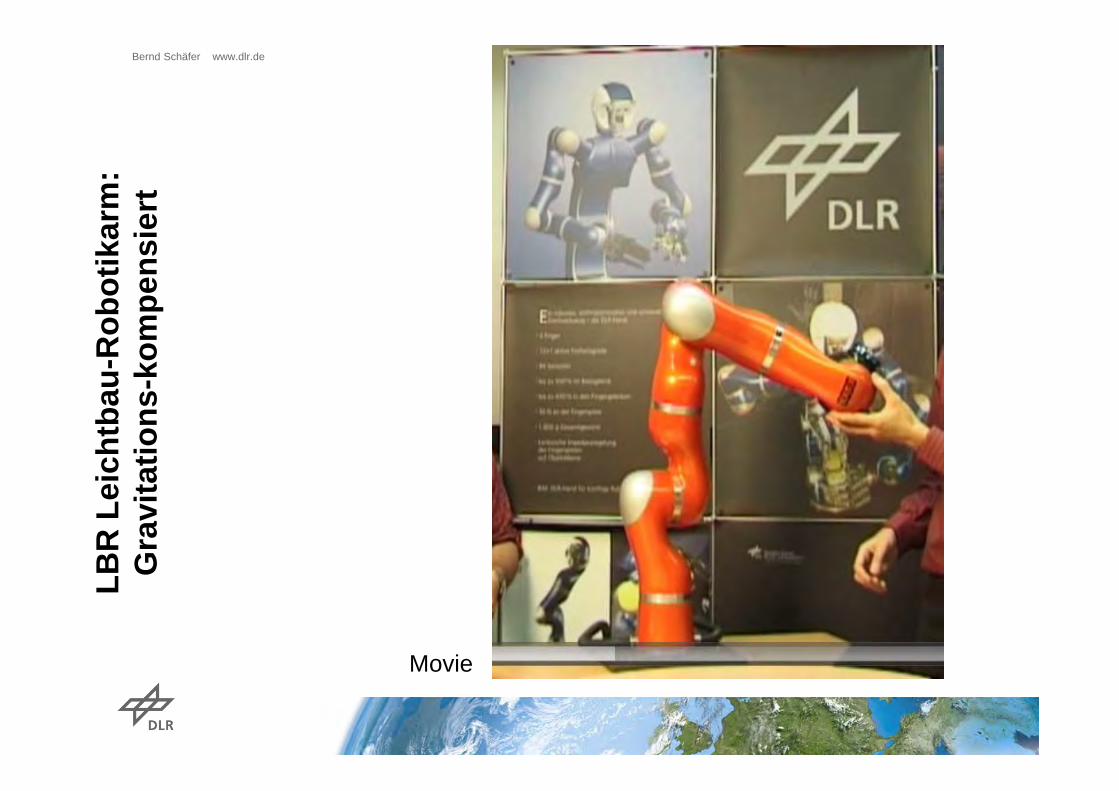
LBR
Lei
chtb
au-R
obot
ikar
m:
Gra
vita
tions
-kom
pens
iert
Bernd Schäfer www.dlr.de
Movie
ROKVISS 2005 – 2011 auf der Internat. Raumstation ISS
Rollin‘ Justin –Humanoid auf Rädern(komplexes System –51 Freiheitsgrade)
Bernd Schäfer www.dlr.de
Rollin‘ JustinRo
llin‐Justin‐Kinem
aticCh
ain‐Circle
Bernd Schäfer www.dlr.de
Movie
Bernd Schäfer www.dlr.de
Nicht nur Räder: auch Beine der DLR Krabbler
Movie
Autonome Navigation basierend auf Stereobilddaten - Prozessierung
Bernd Schäfer www.dlr.de
Movie
Autonome Navigation: 2,5D-Kartierung (Mapping) und Selbstlokalisation
Bernd Schäfer www.dlr.de
Bernd Schäfer www.dlr.de
The new 2018 Mission doesn’t start from scratch: 2005 to mid 09: Single mission,
Carrier Module + Descent Module + Rover 2009 autumn: Split into missions within cooperation with NASA:
2016 mission: TGO and EDM 2018 mission: European Rover as companion of the US MAX‐C Rover
2010 Nov: Successful System PDR for the 2016 and 2018 missions Rover 2011 spring: Merge of the Rovers into a single big NASA‐ESA Rover 2012 Jan: US cooperation on the Rover, TGO PL and LV no longer supported 2012 spring: Seeking for cooperation with Roscosmos
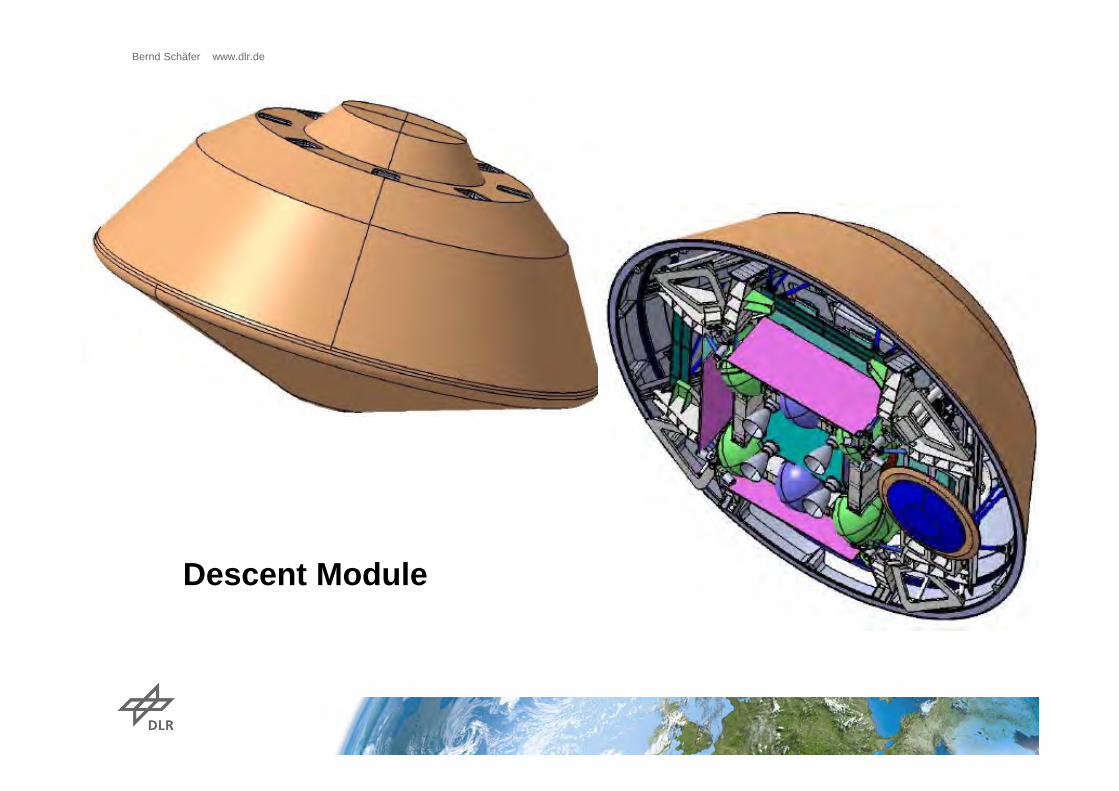
ExoMars descent into Mars atmosphere and touch down by retro-rockets
Bernd Schäfer www.dlr.de
Descent Module
Bernd Schäfer www.dlr.de
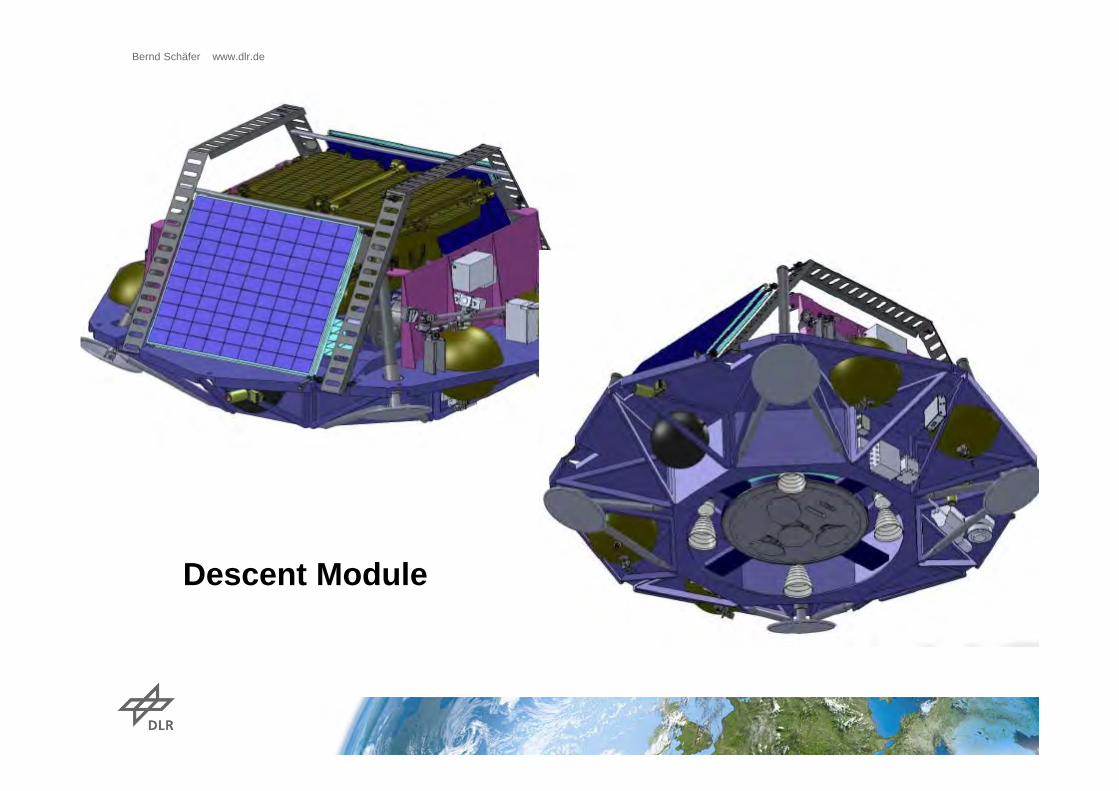
Descent Module
Bernd Schäfer www.dlr.de
RoverMasse: 310 kgPower: 300 WLebensdauer: 218 sols ~ 7 MonateLandekoordinaten: 5°S bis 25°NFahrdauer, -geschw.: bis 100 m/sol und 40 m/h
Bernd Schäfer www.dlr.de
Bernd Schäfer www.dlr.de
Verifikation der Simulationen imPEL - Planetares Explorations-Labfür Fahrdynamik etc. durch Testen in entsprechenden Testanlagen mitrealitätsnahen Mond-, Marsböden(sog. ‘soil simulants’)
Bernd Schäfer www.dlr.de Robotische Marsexploration • 24 Oktober 2013 • VDE/VDI Ulm Folie 38ExoMars Rover: ‘Testen in DLR‘s Laborumgebung PEL‘
Bernd Schäfer www.dlr.de
ExoMars Rover: ‘Testen in DLR‘s Laborumgebung‘
Movie
ExoMars Rover: ‘Deployment and Wheel Walking‘ ModusBernd Schäfer www.dlr.de
Movie
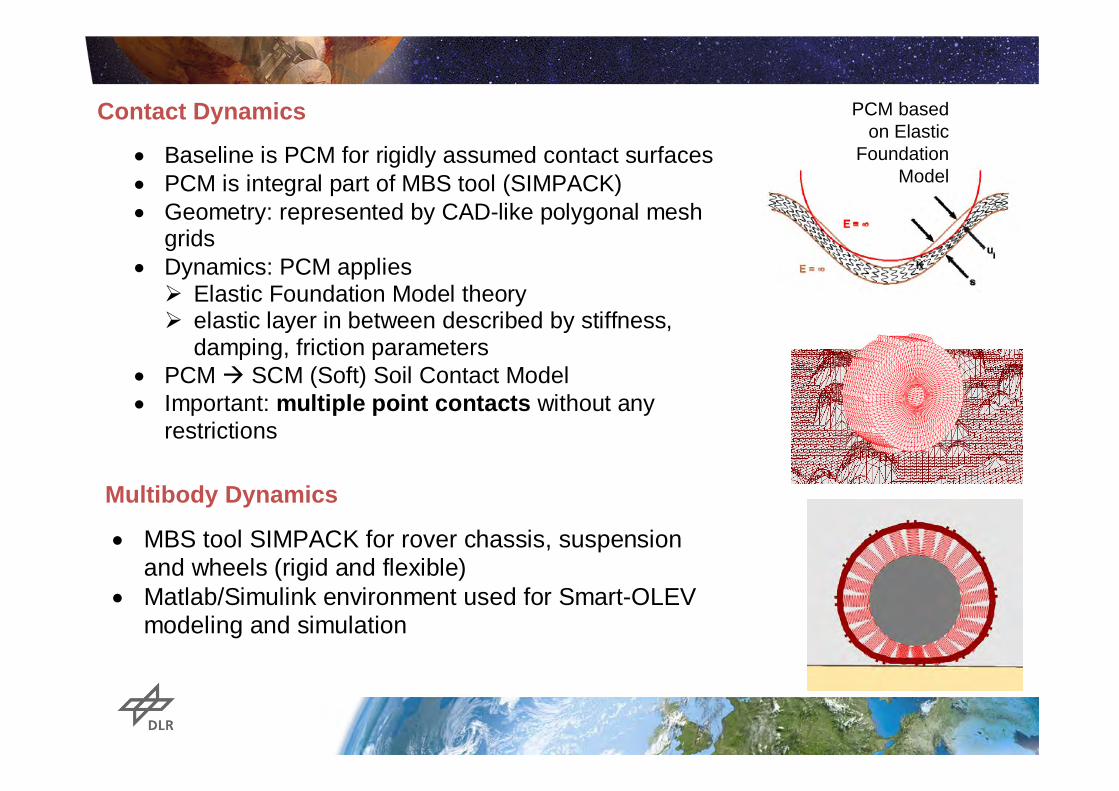
Modellierung und Simulation wichtiger Fahr-Effekte auf weichemund hartem Boden: ‘bulldozing + multipass’ + allg. Böden
Bernd Schäfer www.dlr.de
4 Movies
Bekker: Rad-Boden WW
nckp k zb
tanp c
Determination of the 5 Bekker (Wong) soil parameters via Bevameter(Bekker values) testing
Modelling and Simulation:MBS Topology ‐ Kinematic Chain
(1) Nationale Mondmission: MPE Mobiles Payload Element ~ 15 kg Rover
verstaute Konfiguration
Bernd Schäfer www.dlr.de
Movie
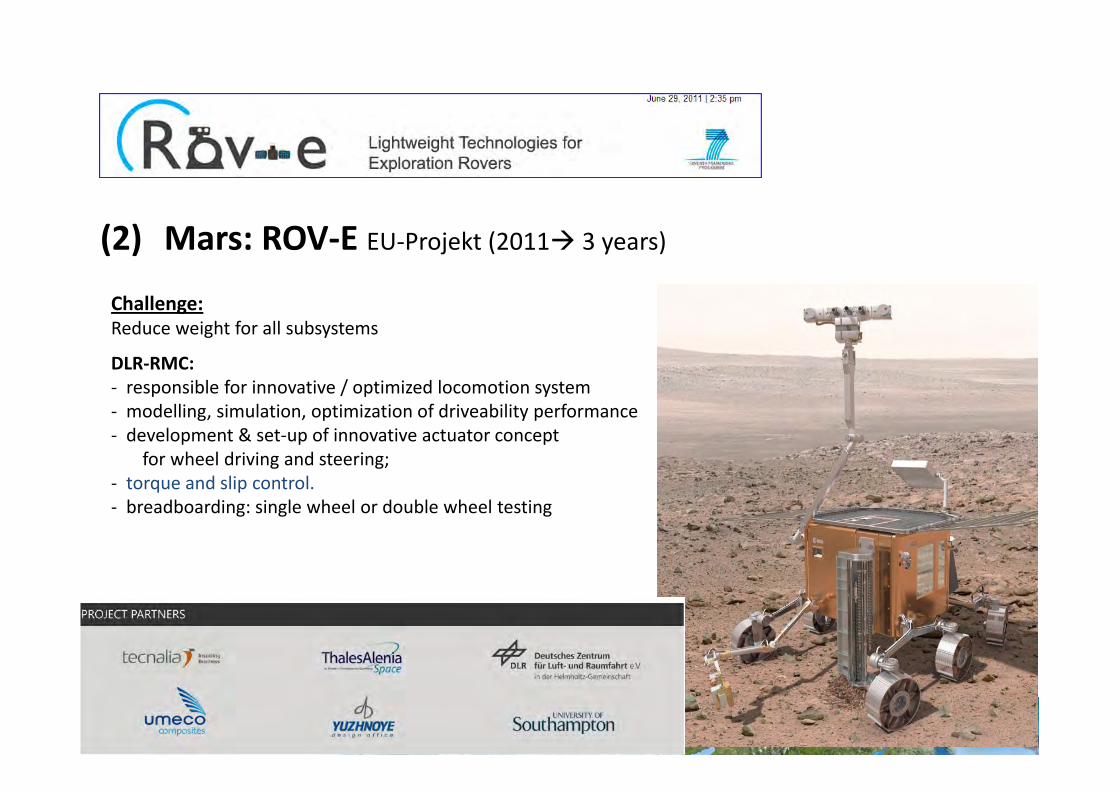
(2) Mars: ROV‐E EU‐Projekt (2011 3 years)
Challenge:Reduce weight for all subsystems
DLR‐RMC: ‐ responsible for innovative / optimized locomotion system‐ modelling, simulation, optimization of driveability performance‐ development & set‐up of innovative actuator concept
for wheel driving and steering; ‐ torque and slip control.‐ breadboarding: single wheel or double wheel testing
Provide mobility by1. self-uprighting & 2. hopping over
planetary surface
Zero-g flight testingin Feb 2012:Parabola flights byNoveSpace Bordeaux
(3) MASCOT ‐ Mobile Asteroid Surface Scout Mission (German payload on 2014/15 Hayabusa‐2 Japanese mission)
Very low gravity: 10‐5 g
Movie
MASCOT
First design approach: 2 excentric massesExzenter+ 1 motor, controlled
New design: only 1 excentric mass + motor, contr.
Conventional concept: two arms (2 paddles) controlled
(Mars) Interior Exploration using Seismic = Investigations, Geodesy and
Heat Transport
‐ Phoenix mission lander ‐ Launch: March 8 ‐March 27, 2016‐ Landing: September 20, 2016‐ Surface operations: 720 days‐ End of Mission: September 18, 2018
Goal: understanding the processes that shaped the rocky planets of the inner solar system
(4)
DLR payload contribution(lead by DLR Inst. PF, Berlin): HP3 Mole ‐ Heat Flow and PhysicalProperties Package
Movie
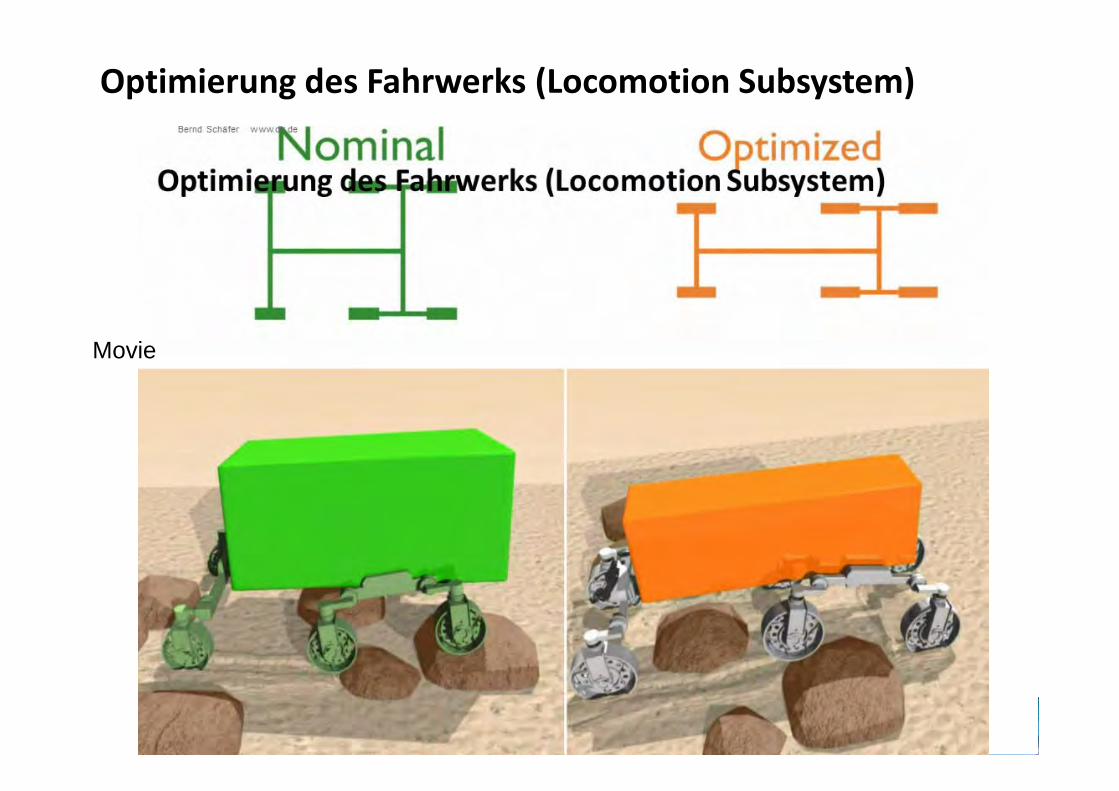
Große Bodenfreiheit durch hohe Schwerpunktlage
Mobilität: Neuartige Fortbewegungskonzepte - z.B. Beine + Räder
Niedrige Bodenfreiheit und hohe Stabilitätdurch tiefe Schwerpunktlage, dadurch gutes Fortkommen in sehr unebenem Gelände
Bernd Schäfer www.dlr.de
Mögliches Explorations-Szenarium, z.B. auf dem Mond: ‘arbeitende Vehikel‘, Energie- und Kommunikations-Stationen, Docking- und Interface-Vorrichtungen, Autonomie weitestgehend
Bernd Schäfer www.dlr.de
Bernd Schäfer www.dlr.de
Visionäre kooperative Unternehmungen - national
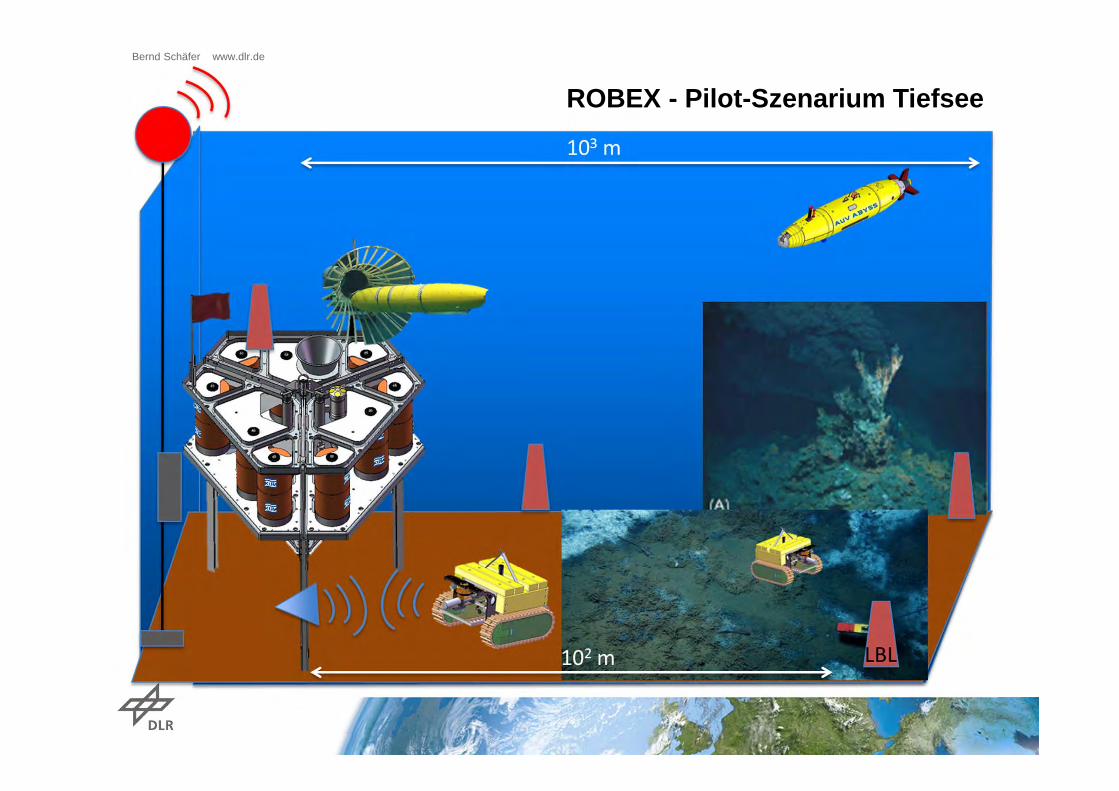
ROBEX - Pilot-Szenarium Tiefsee
Bernd Schäfer www.dlr.de
Crawler (Kettenantrieb)Tiefsee
Bernd Schäfer www.dlr.de
Bernd Schäfer www.dlr.de
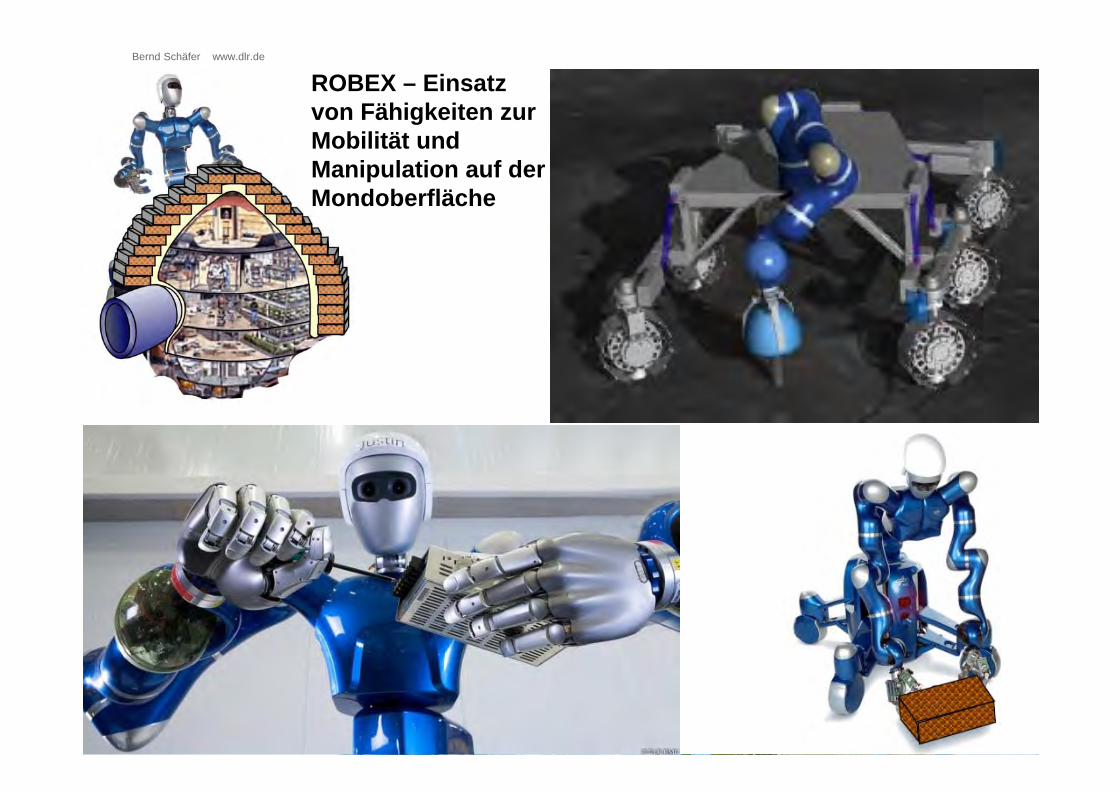
ROBEX – Einsatz von Fähigkeiten zur Mobilität und Manipulation auf der Mondoberfläche
Bernd Schäfer www.dlr.de
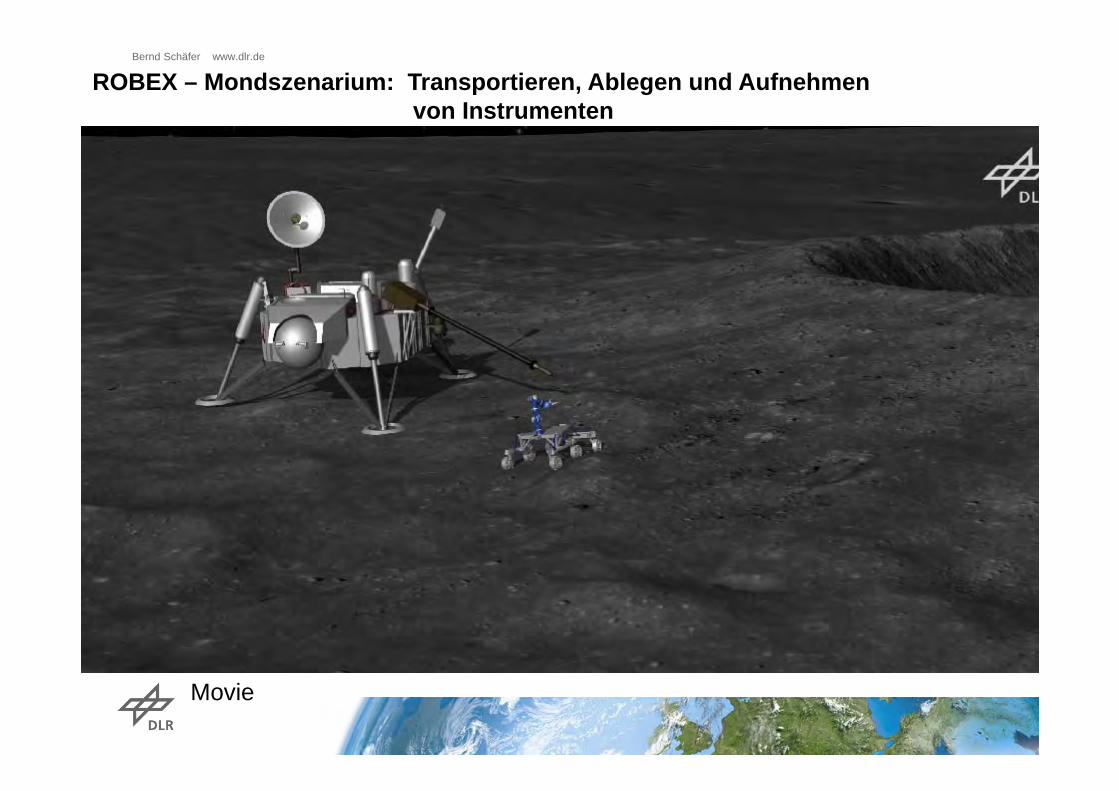
ROBEX – Mondszenarium: Transportieren, Ablegen und Aufnehmen von Instrumenten
Movie
Bernd Schäfer www.dlr.de
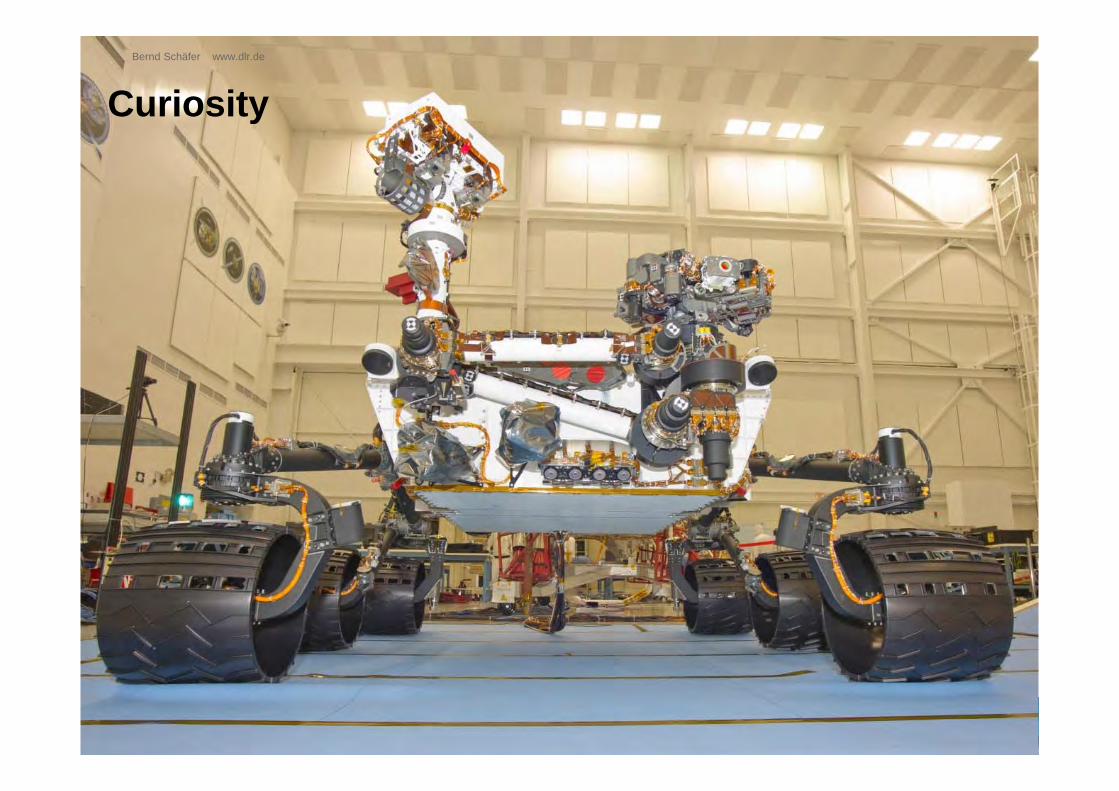
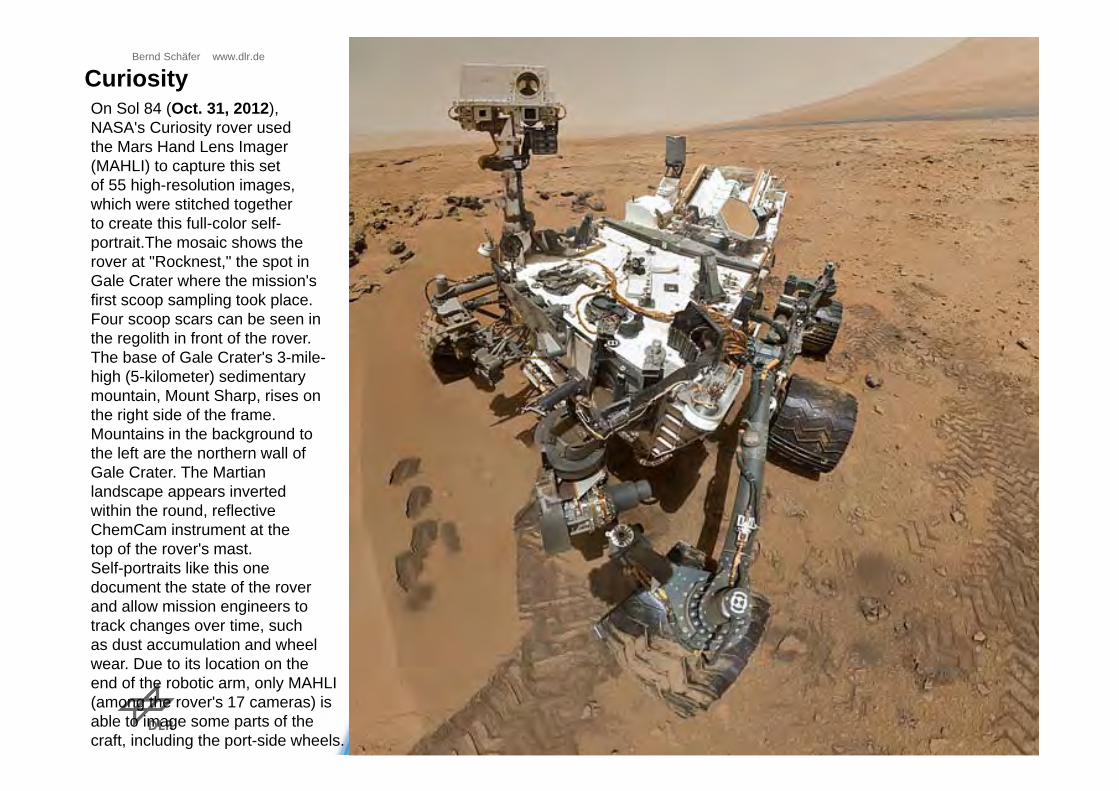
Curiosity
NASA: 1997 + 2004 + 2012(1) Mars Pathfinder Mission: Sojourner, Landung Juli 1997(2+3) MER = Mars Exploration Robot: Spirit & Opportunity, Landung Jan 2004(4) MSL Mars Science Laboratory: Curiosity, Landung 6 Aug 2012, Betrieb 2 Jahre
12 kg
180 kg
900 kg - RTG powered
Bernd Schäfer www.dlr.de
CuriosityOn Sol 84 (Oct. 31, 2012), NASA's Curiosity rover used the Mars Hand Lens Imager (MAHLI) to capture this set of 55 high-resolution images, which were stitched together to create this full-color self-portrait.The mosaic shows the rover at "Rocknest," the spot in Gale Crater where the mission's first scoop sampling took place. Four scoop scars can be seen in the regolith in front of the rover.The base of Gale Crater's 3-mile-high (5-kilometer) sedimentary mountain, Mount Sharp, rises on the right side of the frame. Mountains in the background to the left are the northern wall of Gale Crater. The Martian landscape appears inverted within the round, reflective ChemCam instrument at the top of the rover's mast.Self-portraits like this one document the state of the rover and allow mission engineers to track changes over time, such as dust accumulation and wheel wear. Due to its location on the end of the robotic arm, only MAHLI (among the rover's 17 cameras) is able to image some parts of the craft, including the port-side wheels.
Bernd Schäfer www.dlr.de
• Die “International Mars Exploration Working Group” (IMEWG) trafsich erstmals nach 2009 wieder am 26. Juni 2013 in London.
• Viele Agenturen bekräftigten das Interesse an einer Probenrückführungvom Mars.
• NASA plant mit der 2020-Mission bereits Proben für eine Rückführungaufzunehmen („Caching“).
• Die Agenturen beschlossen die Einrichtung einer technischenArbeitsgruppe zur Diskussion der MSR-Architektur sowie einerwissenschaftlichen Arbeitsgruppe zur Diskussion der wissenschaftlichenAspekte der Probenrückführung und –untersuchung.
• Mobilität + Autonomie: schneller, sicherer, autonomer größeres Gebiet erkunden in kürzerer Zeit
(Opportunity: ca 35 km in 9 Jahren)
Wo geht die Reise hin?
Bernd Schäfer www.dlr.de
ISECG - International Space Exploration Coordination GroupBernd Schäfer www.dlr.de
Mon
dM
ars
And
ere
Bernd Schäfer www.dlr.de
(Un-) Bemannte Missionen:
Moon Next
Asteroid Next (Asteroid Re-direction Mission)
Mars Probenrückkehr (robotisch, nach 2020 ?)
Mars bemannt ( nach 2035 ? )
Bernd Schäfer www.dlr.de
Bernd Schäfer www.dlr.de
Werbung für Abschlussarbeitsthemen im Bereich Robotik und Mechatronik: