Page 1
Lineare Algebra
ThemengebieteI Vektoren, MatrizenI Eigenwerte und EigenvektorenI Invertieren von MatrizenI Lösen linearer Gleichungssysteme
I Numerisches lösen von DGL
∆f (x) = g(x) (1)
nachdem ∆ diskretisiert wurdeI Lösen von Integralgleichungen
f (x) = g(x) +
1∫0
k(x , y)f (y)dy (2)
I Lineare Fits
Page 2
VektornormSei X ein komplexer bzw. reeller Raum, und |.| eine lineareAbbildung von
|.| : X → C(R)
mitI |x | ≥ 0 (Positivität)I |x | = 0↔ x = 0 (Definitheit)I |α · x | = |α| · |x | ∀x ∈ X , ∀α ∈ C (Homogenität)I |x + y | ≤ |x |+ |y | ∀x , y ∈ X (Dreiecksungleichung)
so nennt man |.| eine Norm.Beispiel:
|x |1 =n∑
i=1
|xi | (Betragsssummennorm) (3)
|x |2 =
√√√√ n∑i=i
x2i (Euklidische Norm) (4)
Page 3
SkalarproduktSeien x,y ∈ Cn(Rn) dann ist
x · y =n∑
i=1
x∗i yi im komplexen (5)
x · y =n∑
i=1
xiyi im rellen (6)
das Skalarprodukt der beiden Vektoren.In R3 gilt
x · y = |x||y| cos∠(x,y) (7)
Oder in Matrixschreibweise
〈x |y〉 =n∑
i=1
x∗1iyi1 (8)
Page 4
Darstellung von Vektoren und Matrizen
Typischerweise werden Vektoren und Matrizen als Listen bzw.verschachtelte Listen dargestellt
I Python:a=[[1,2],[2,0]]
I C (z.B. GSL):m->data[0*m->tda+0]=1.;gsl_matrix_set(m,0,1,2.);gsl_matrix_set(m,1,0,2.);gsl_matrix_set(m,1,1,0.);
I Mathematica:a={ { 1,2},{2,0} }
Page 5
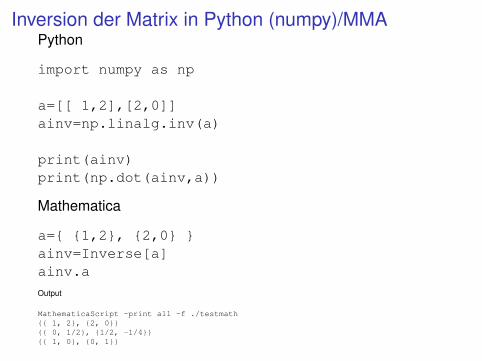
Inversion der Matrix in Python (numpy)/MMAPython
import numpy as np
a=[[ 1,2],[2,0]]ainv=np.linalg.inv(a)
print(ainv)print(np.dot(ainv,a))
Mathematica
a={ {1,2}, {2,0} }ainv=Inverse[a]ainv.a
Output
MathematicaScript -print all -f ./testmath{{ 1, 2}, {2, 0}}{{ 0, 1/2}, {1/2, -1/4}}{{ 1, 0}, {0, 1}}
Page 6
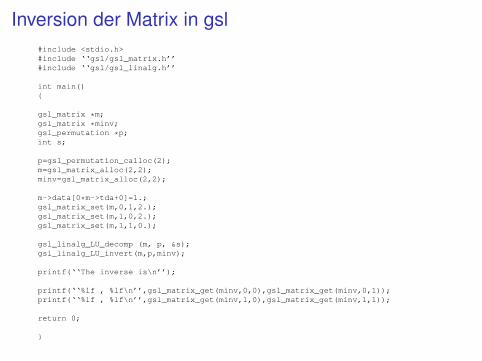
Inversion der Matrix in gsl#include <stdio.h>#include ‘‘gsl/gsl_matrix.h’’#include ‘‘gsl/gsl_linalg.h’’
int main(){
gsl_matrix *m;gsl_matrix *minv;gsl_permutation *p;int s;
p=gsl_permutation_calloc(2);m=gsl_matrix_alloc(2,2);minv=gsl_matrix_alloc(2,2);
m->data[0*m->tda+0]=1.;gsl_matrix_set(m,0,1,2.);gsl_matrix_set(m,1,0,2.);gsl_matrix_set(m,1,1,0.);
gsl_linalg_LU_decomp (m, p, &s);gsl_linalg_LU_invert(m,p,minv);
printf(‘‘The inverse is\n’’);
printf(‘‘%lf , %lf\n’’,gsl_matrix_get(minv,0,0),gsl_matrix_get(minv,0,1));printf(‘‘%lf , %lf\n’’,gsl_matrix_get(minv,1,0),gsl_matrix_get(minv,1,1));
return 0;
}
Page 7
Vektoren und Matrizen in der Physik
Praktisch werden in der Physik ständig Vektoren und Matrizengebraucht:
I Mechanik (Kräftevektoren)I Geometrische OptikI Quantenmechanik
Einige Definitionen sind hierbei gebräuchlich, insbesonderehinsichtlich Darstellung von Matrizen über ihre Einträge.
Page 8
MatrizenDarstellung einer Matrix über Einträge (Koordinatenform)
An×m = aij mit i ≤ n ,j ≤ m (9)
In dieser Schreibweise ist das Produkt zweier Matrizen:
A · B =∑
j
aijbjm = aijbjm = cim (10)
Damit sind auch die beim Skalarprodukt eingegführten brasund kets
〈x |i = x1i (Zeilenvektor) (11)|y〉i = yi1 (Spaltenvektor) (12)
Man lässt häufig die Summenzeichen weg und meint das übergleiche Indices summiert wird ≡ EinsteinscheSummenkonvention.
Page 9
Einige Operationen mit Matrizen:
I Transposition
AT = (aij)T = aji
(A · B)T = (aijbjm)T = bmjaji = BT · AT (13)
I Adjungierte
(AT )∗ = A† =(
(aTij )∗)
= a∗ji (14)
I Spur
Tr(A) = aii (15)
I Determinante
detA = εi1...ina1i1 . . . anin (16)
Page 10
I ε ist der Levi-Civita-Tensor mit den Eigenschaften
εijk ... =
+1 falls (i , j , k , . . . ) gerade Permutation−1 falls (i , j , k , . . . ) ungerade Permutation0 wenn mindesten zwei Indices gleich sind
(17)
I Häufig auch Kreuzprodukt zweier Vektoren inMatrixschreibweise
(~a× ~b)i = εijkajbk (18)
Hier das Bsp.
~a · (~a× ~b) = aiεijkajbk = −εjikaiajbk = 0 (19)
Page 11
Besondere Matrizen, z.B.I Hermitesch (Symmetrisch)
A† = A (20)
(aij)† = a∗ji = aij (21)
I Unitär (Orthogonal)
A† = A−1 (22)
Weshalb sind diese beiden Eigenschaften so besonders?I Hermitesch⇒ reelle Eigenwerte (physik. Observable)I Unitär⇒ Normerhaltende Transformationen
(Basiswechsel), alle EW liegen auf Einheitskreis
Page 12
Zeige beide Eigenschaften in HilbertraumHermitesch (sei A Eigenzustand zu O mit Eigenwert a), d.h.
O|A〉 = a|A〉
Zunächst versteht sich in bra-ket-Schreibweise
O|A〉† =(
OijAj1
)†=(
A∗1jO∗ji
)= 〈A|O† (23)
〈A|O|A〉 = a〈A|A〉〈A|O|A〉 = 〈A|O†|A〉∗ = 〈A|O|A〉∗
= a∗〈A|A〉⇒ a = a∗ (24)
Page 13
Zeige beide Eigenschaften in Hilbertraum
Operator U ist unitär.
〈A|A〉 = 〈A|U†U︸︷︷︸1
|A〉
=(〈A|U†
)︸ ︷︷ ︸
u∗〈A|
(U|A〉
)︸ ︷︷ ︸
u|A〉
= u∗u〈A|A〉⇒ u∗u = 1 (25)
Eigenwerte haben Norm 1⇒ u = eiφ
Häufige Frage: Finde eine unitäre Transformation, sodass eineMatrix Diagonalform annimmt (z.B. Hauptachsentrafo)
Page 14
Eigenwerte und EigenvektorenI Eigenwertgleichung für Operator O mit EV Ai und EW ni
OAi = niAi (26)
I Bestimmung über charakteristisches Polynom
det(O − λI) = 0 (27)
Nullstellen sind die Eigenwerte.I Trafo
UOU† = O (28)
wobei U zeilenweise EV sind
U =
A1,1 A1,2 . . . A1,n...
......
...An,1 An,1 . . . An,n
(29)
I Maximaler EW (betragsmässig) wird spektraler Radiusgenannt
ρ(A) = max{|λ||λ ∈ σ(A)} (30)
Page 15
Beispiel:
M =
(2 11 −2
)det(M − λI) = λ2 − 5 = 0
λ1,2 = ±√
5(M − λ1,2I)v1,2 = 0
v1 = (2−√
5,1)
v2 = (2 +√
5,1)
U =
(2−√
5 12 +√
5 1
)UMU† =
(−10
(−2 +
√5)
00 10
(2 +√
5) ) (31)
Page 16
MatrixzerlegungenI Für alle Matrizen A ∈ Cn×n existiert eine unitäre Matrix
U ∈ Cn×n derart, dass
M = UAU† (32)
eine rechte obere Dreiecksmatrix ist.I Sollte A hermitesch sein ist M diagonal.I Definiere die Koniditionszahl einer Matrix A
cond(A) = |A|a|A−1|a (33)
mit |A|a := sup|x |a=1
|Ax |a induzierte Matrixnorm. Je größer
diese Zahl, desto schlechter konvergieren iterative LöserI Schreibe Matrix A ∈ Rn×n um
UAV T = diag{σ1, . . . , σn} (34)
mit U und V orthogonale Matrizen und
0 < σ1 ≤ · · · ≤ σn (Singulärwerte) (35)
Page 17
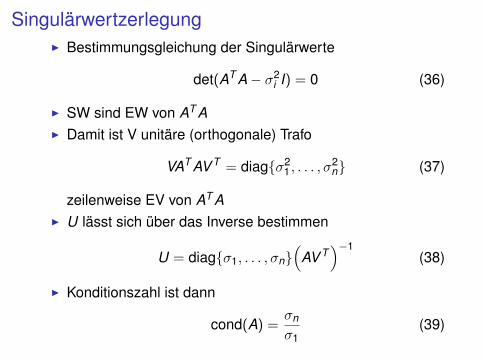
SingulärwertzerlegungI Bestimmungsgleichung der Singulärwerte
det(AT A− σ2i I) = 0 (36)
I SW sind EW von AT AI Damit ist V unitäre (orthogonale) Trafo
VAT AV T = diag{σ21, . . . , σ
2n} (37)
zeilenweise EV von AT AI U lässt sich über das Inverse bestimmen
U = diag{σ1, . . . , σn}(
AV T)−1
(38)
I Konditionszahl ist dann
cond(A) =σn
σ1(39)
Page 18
Singulärwertzerlegung hat viele AnwendungenI Einfache Bildung der inversen, da U und V unitär
(orthogonal sind) braucht nur noch die Kehrwerte derDiagonalmatrix
I Bestimmung der PseudoinversenI Lösung des LeastSquare-Problems
Es existieren noch weitere Zerlegungen (LR, QR, Choleskyusw.)
Page 19
Inversion von Matrizen
Generell gehen wir von quadratischen Matrizen aus.I Direkte Verfahren z.B. über Adjunkte, SVD oder andere
ZerlegungenI Iterative Verfahren (Splitting-Verfahren z.B. Jacobi)
Frage der Eindeutigkeit von Lösungen zu Ax = bI Inverse existiert wenn det(A) 6= 0
I...
A−1 =adj(A)
det(A)(40)
Page 20
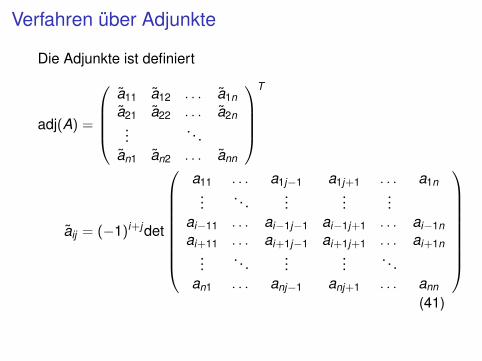
Verfahren über Adjunkte
Die Adjunkte ist definiert
adj(A) =
a11 a12 . . . a1na21 a22 . . . a2n
.... . .
an1 an2 . . . ann
T
aij = (−1)i+jdet
a11 . . . a1j−1 a1j+1 . . . a1n...
. . ....
......
ai−11 . . . ai−1j−1 ai−1j+1 . . . ai−1nai+11 . . . ai+1j−1 ai+1j+1 . . . ai+1n
.... . .
......
. . .an1 . . . anj−1 anj+1 . . . ann
(41)
Page 21
Python
import numpy as np
def adjunkte(a):b=np.zeros( (len(a),len(a)))for i in range(len(a)):
for j in range(len(a)):subdet=np.linalg.det(np.delete(np.delete(a,i,0),j,1))b[i,j]=(-1)**(i+j)*subdet
return np.transpose(b)
def inv(a):return adjunkte(a)/np.linalg.det(a)
Page 22
Über SVD
I Nutze aus, dass in der Zerlegung
USV T = A (42)
U und T unitär (orhtogonal) sind
A−1 =(
V T)−1
S−1U−1
= VS−1UT (43)
I Die inverse der Diagonalmatrix sind einfach die Kehrwertein der Diagonalen
Page 23
Splitting-VerfahrenZiel ist es eine Fixpunktiteration zu bekommen
xn+1 = F (xn) (44)
Wir lösen allgemein:
Ax = b (45)
I Iterationsverfahren ist geg. durch AbbildungF : Cn × Cn → Cn und heißt linear wenn
F (x,b) = Mx + Nb (46)
I x ∈ Cn bezeichnen wir als Fixpunkt der Abb.F : Cn × Cn → Cn, wenn
x = F (x,b) (47)
mit b ∈ Cn.I F heißt konsistent zur Matrix A, wenn
x = limn→∞
xn = limn→∞
F (xn−1,b) unabh. vom Startwert
Page 24
I Iterationsverfahren genau dann konvergent wenn
ρ(M) < 1 (48)
der Spektralradius der Iterationsmatrix < 1 ist.I Splitting-Methode
A = B + (A− B)
⇒ Ax = bBx = (B − A)x + b
→ x = B−1(B − A)︸ ︷︷ ︸M
x + B−1︸︷︷︸N
b (49)
I Lineares Iterationsverfahren
xn+1 = F (xn,b) = Mxn + Nb (50)
Page 25
Jacobi-Verfahren
I Wenn A nichtverschwindende Diagonalelemente aufweistaii 6= 0 benutze
D = diag{a11, . . . ,ann}M = D−1(D − A)
N = D−1
Iteration
x = D−1(D − A)x + D−1b (51)
I Wiederum Inversion der Diagonalmatrix ist sehr einfach.I Konvergenz wenn spektraler Radius von M < 1
Page 26
Weitere Verfahren
I Gauß-Seidel ≡ SplittingverfahrenI MehrgitteverfahrenI Projektive Verfahren (Krylov-Unterraum-Methoden)
Page 27
Nichtquadratische Matrizen
Was macht man bei Nichtquadratischen Matrizen A ∈ Rm×n?I Erzeuge quadratische Matrix
Ax = b
⇒ AT Ax = AT b
x =(
AT A)−1
AT︸ ︷︷ ︸P
b (52)
P ist pseudoinverseI Sollte AT A nicht invertierbar sein definiert man die
Pseudoinverse über die SVD bei der man die SW < εvernachlässigt.
Page 28
Least-Squares-Problem
I Beziehung zum Least-Squares-Problem
r = Ax − y (53)
definiert das Residuum, dann ist das Abstandsquadrat
|r |2 = rT r = (xT AT − yT )(Ax − y)
= xT AT Ax − xT AT y − yT Ax + yT y
= xT AT Ax − 2yT Ax + yT y (54)
I Finde das Minimum (1.Abl Null setzen)
∇|r |2 = 2AT Ax − 2yAT = 0
⇒ AT Ax = AT y (55)