Communication Technology Laboratory Wireless Communications Group Prof. Dr. A. Wittneben ETH Zurich, ETF, Sternwartstrasse 7, 8092 Zurich Tel 41 44 632 36 11 Fax 41 44 632 12 09 Fachpraktikum Digitale Modulation Versuch KT 35 Stand: 27. August 2015 00 01 10 11 Die theoretischen Fragen in Kapitel 4,5,6 und 7 müssen vor dem Praktikum gelöst werden. Die praktischen Aufgaben von den Kapiteln 4,5,6 und 7 werden während des Praktikums gelöst. Ausgabe: Herbst 2015
Transcript
Communication Technology LaboratoryWireless Communications Group
Prof. Dr. A. Wittneben
ETH Zurich, ETF, Sternwartstrasse 7, 8092 Zurich
Tel 41 44 632 36 11 Fax 41 44 632 12 09
FachpraktikumDigitale Modulation
Versuch KT 35
Stand:27.A
ugust
2015
00
01
10
11
Die theoretischen Fragen in Kapitel 4,5,6 und 7 müssen vor dem Praktikum gelöst
werden. Die praktischen Aufgaben von den Kapiteln 4,5,6 und 7 werden während des
Sowohl bei der leitungsgebundenen als auch bei der drahtlosen Übertragung wird die Informationmehr und mehr in Form von digitalen Signalen übermittelt. Während die zu übertragenden Datenund Messwerte meist schon in digitaler Form vorliegen, muss für die digitale Sprachübertragungzuerst eine Digitalisierung der Quellensignale erfolgen.Die digitale Modulation unterscheidet sich von der analogen Modulation dadurch, dass die Parame-ter des Trägersignals nicht analog variiert werden, sondern dass sie nur diskrete Werte annehmen.Der Empfänger hat damit zum voraus Kenntnis über die endliche Zahl der möglichen Signalzu-stände. Überschreiten die während der Übertragung entstehenden Verzerrungen und Störungendes Nachrichtensignals ein gewisses Ausmass nicht, kann der Empfänger dennoch auf das korrek-te, gesendete Signal zurückschliessen. Die Störfestigkeit der Übertragung lässt sich auf diese Weiseerheblich steigern.
Kapitel 2
Digitale Übertragungssysteme
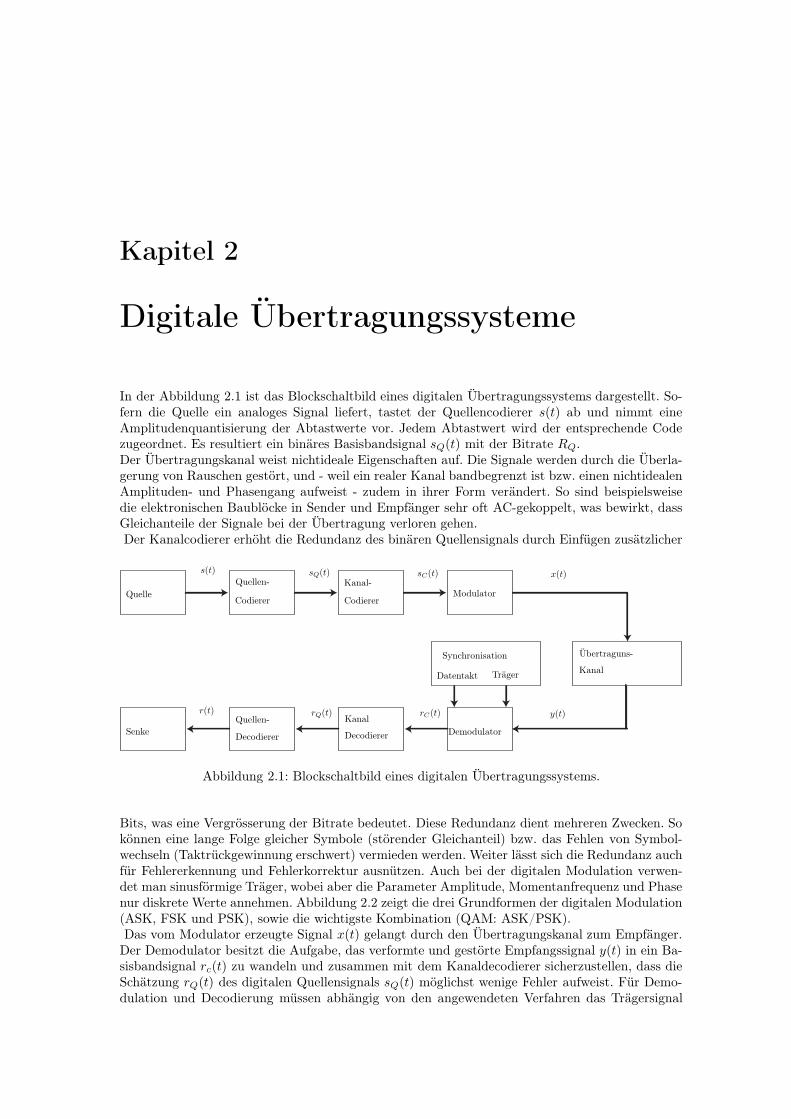
In der Abbildung 2.1 ist das Blockschaltbild eines digitalen Übertragungssystems dargestellt. So-fern die Quelle ein analoges Signal liefert, tastet der Quellencodierer s(t) ab und nimmt eineAmplitudenquantisierung der Abtastwerte vor. Jedem Abtastwert wird der entsprechende Codezugeordnet. Es resultiert ein binäres Basisbandsignal sQ(t) mit der Bitrate RQ.Der Übertragungskanal weist nichtideale Eigenschaften auf. Die Signale werden durch die Überla-gerung von Rauschen gestört, und - weil ein realer Kanal bandbegrenzt ist bzw. einen nichtidealenAmplituden- und Phasengang aufweist - zudem in ihrer Form verändert. So sind beispielsweisedie elektronischen Baublöcke in Sender und Empfänger sehr oft AC-gekoppelt, was bewirkt, dassGleichanteile der Signale bei der Übertragung verloren gehen.Der Kanalcodierer erhöht die Redundanz des binären Quellensignals durch Einfügen zusätzlicher
QuelleQuellen-
Codierer
Kanal-
CodiererModulator
Synchronisation Übertraguns-
Kanal
DemodulatorKanal
Decodierer
Quellen-
DecodiererSenke
Datentakt Träger
s(t) sQ(t) sC(t) x(t)
y(t)rC(t)rQ(t)r(t)
Abbildung 2.1: Blockschaltbild eines digitalen Übertragungssystems.
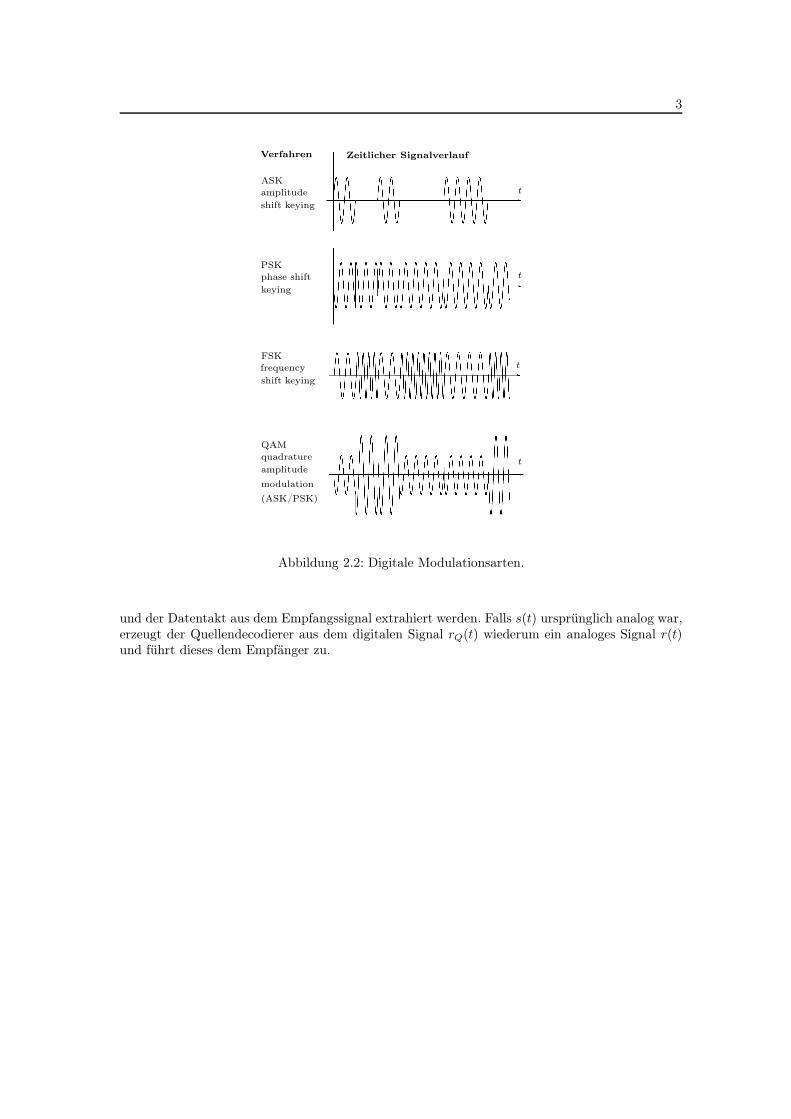
Bits, was eine Vergrösserung der Bitrate bedeutet. Diese Redundanz dient mehreren Zwecken. Sokönnen eine lange Folge gleicher Symbole (störender Gleichanteil) bzw. das Fehlen von Symbol-wechseln (Taktrückgewinnung erschwert) vermieden werden. Weiter lässt sich die Redundanz auchfür Fehlererkennung und Fehlerkorrektur ausnützen. Auch bei der digitalen Modulation verwen-det man sinusförmige Träger, wobei aber die Parameter Amplitude, Momentanfrequenz und Phasenur diskrete Werte annehmen. Abbildung 2.2 zeigt die drei Grundformen der digitalen Modulation(ASK, FSK und PSK), sowie die wichtigste Kombination (QAM: ASK/PSK).Das vom Modulator erzeugte Signal x(t) gelangt durch den Übertragungskanal zum Empfänger.
Der Demodulator besitzt die Aufgabe, das verformte und gestörte Empfangssignal y(t) in ein Ba-sisbandsignal rc(t) zu wandeln und zusammen mit dem Kanaldecodierer sicherzustellen, dass dieSchätzung rQ(t) des digitalen Quellensignals sQ(t) möglichst wenige Fehler aufweist. Für Demo-dulation und Decodierung müssen abhängig von den angewendeten Verfahren das Trägersignal
3
Verfahren Zeitlicher Signalverlauf
ASK
amplitude
shift keying
PSK
phase shift
keying
FSK
frequency
shift keying
QAM
quadrature
amplitude
modulation
(ASK/PSK)
t
t
t
t
Abbildung 2.2: Digitale Modulationsarten.
und der Datentakt aus dem Empfangssignal extrahiert werden. Falls s(t) ursprünglich analog war,erzeugt der Quellendecodierer aus dem digitalen Signal rQ(t) wiederum ein analoges Signal r(t)und führt dieses dem Empfänger zu.
Kapitel 3
Das Versuchssystem
Mit Hilfe des Versuchssystems für digitale Datenübertragung “DCS 297” sollen die Funktionswei-se der digitalen Übertragungsverfahren untersucht und die Resultate der theoretischen Aufgabenüberprüft werden.
Das Versuchssystem besteht aus mehreren Baublöcken, mit welchen sich verschiedene digitaleÜbertragungsverfahren demonstrieren lassen.
(1)
(1)
(2)
(3)
(4)
(5)
(6)
(7)
(8)
(9)
(10)
(11)
(12)
(13)
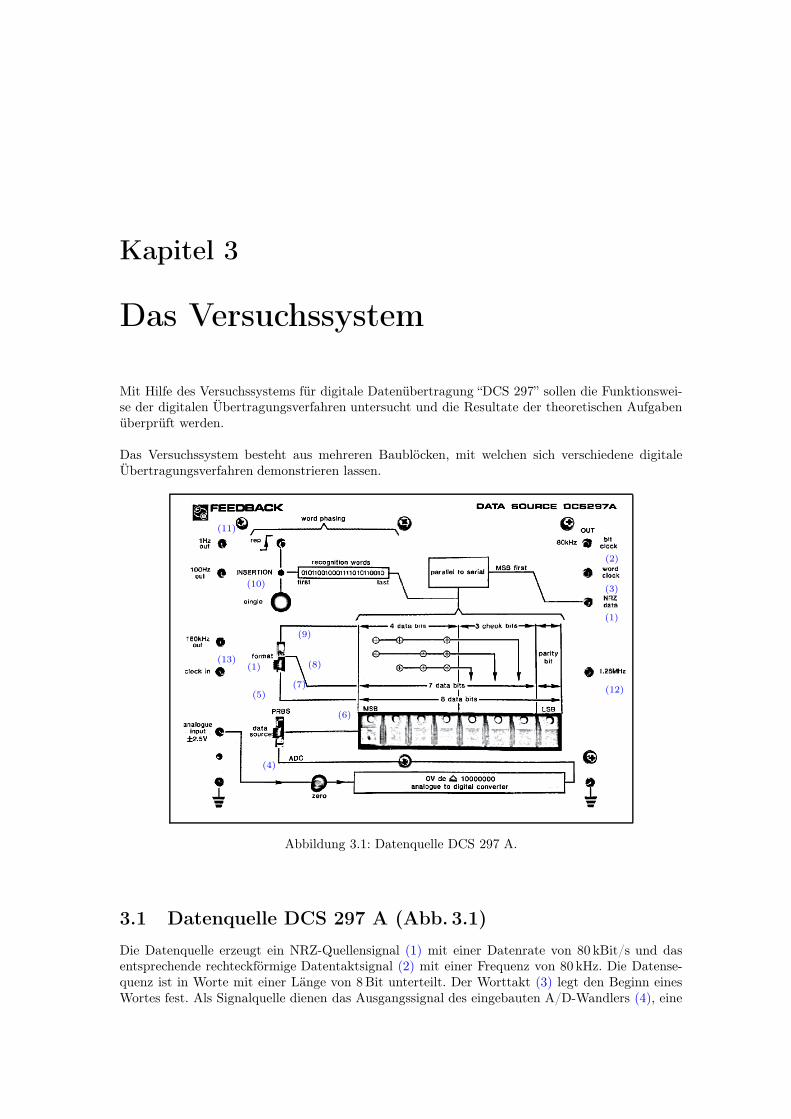
Abbildung 3.1: Datenquelle DCS 297 A.
3.1 Datenquelle DCS 297 A (Abb. 3.1)
Die Datenquelle erzeugt ein NRZ-Quellensignal (1) mit einer Datenrate von 80 kBit/s und dasentsprechende rechteckförmige Datentaktsignal (2) mit einer Frequenz von 80 kHz. Die Datense-quenz ist in Worte mit einer Länge von 8 Bit unterteilt. Der Worttakt (3) legt den Beginn einesWortes fest. Als Signalquelle dienen das Ausgangssignal des eingebauten A/D-Wandlers (4), eine
3.2. LEITUNGSCODIERER DCS 297 B 5
(1)
(2)
(3)
(4)
(5)
(6)
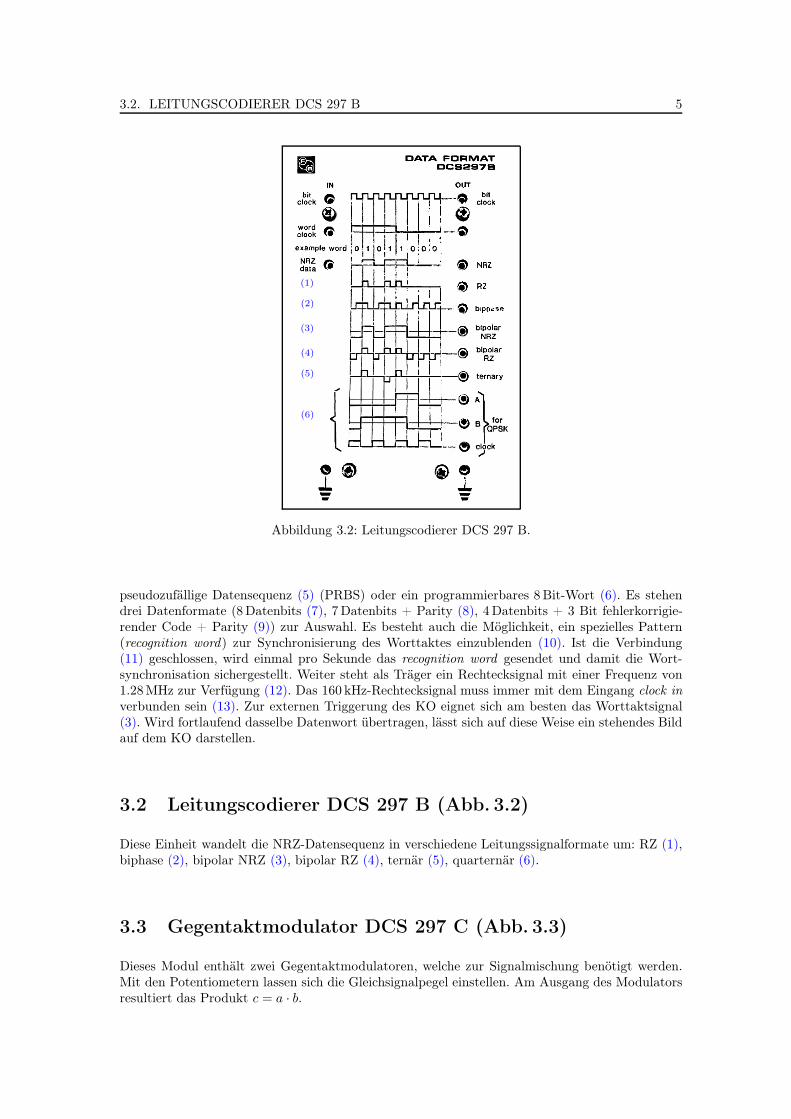
Abbildung 3.2: Leitungscodierer DCS 297 B.
pseudozufällige Datensequenz (5) (PRBS) oder ein programmierbares 8 Bit-Wort (6). Es stehendrei Datenformate (8 Datenbits (7), 7 Datenbits + Parity (8), 4 Datenbits + 3 Bit fehlerkorrigie-render Code + Parity (9)) zur Auswahl. Es besteht auch die Möglichkeit, ein spezielles Pattern(recognition word) zur Synchronisierung des Worttaktes einzublenden (10). Ist die Verbindung(11) geschlossen, wird einmal pro Sekunde das recognition word gesendet und damit die Wort-synchronisation sichergestellt. Weiter steht als Träger ein Rechtecksignal mit einer Frequenz von1.28 MHz zur Verfügung (12). Das 160 kHz-Rechtecksignal muss immer mit dem Eingang clock in
verbunden sein (13). Zur externen Triggerung des KO eignet sich am besten das Worttaktsignal(3). Wird fortlaufend dasselbe Datenwort übertragen, lässt sich auf diese Weise ein stehendes Bildauf dem KO darstellen.
3.2 Leitungscodierer DCS 297 B (Abb. 3.2)
Diese Einheit wandelt die NRZ-Datensequenz in verschiedene Leitungssignalformate um: RZ (1),biphase (2), bipolar NRZ (3), bipolar RZ (4), ternär (5), quarternär (6).
3.3 Gegentaktmodulator DCS 297 C (Abb. 3.3)
Dieses Modul enthält zwei Gegentaktmodulatoren, welche zur Signalmischung benötigt werden.Mit den Potentiometern lassen sich die Gleichsignalpegel einstellen. Am Ausgang des Modulatorsresultiert das Produkt c = a · b.
6 KAPITEL 3. DAS VERSUCHSSYSTEM
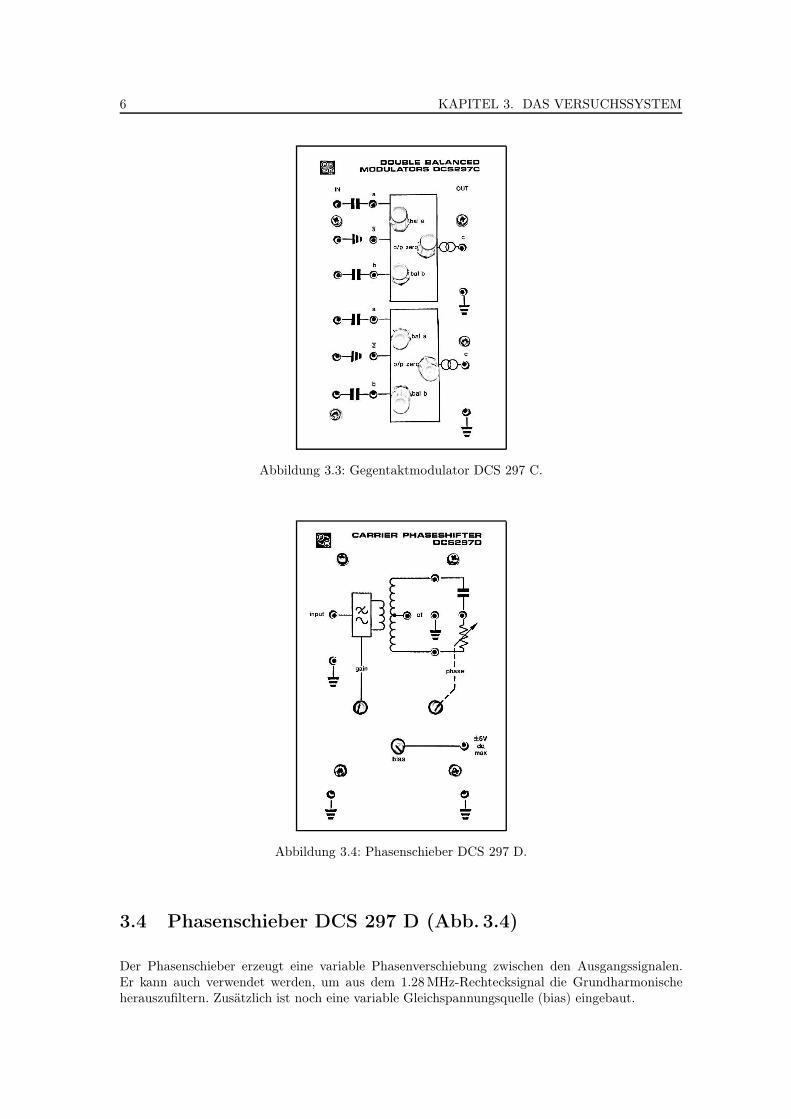
Abbildung 3.3: Gegentaktmodulator DCS 297 C.
Abbildung 3.4: Phasenschieber DCS 297 D.
3.4 Phasenschieber DCS 297 D (Abb. 3.4)
Der Phasenschieber erzeugt eine variable Phasenverschiebung zwischen den Ausgangssignalen.Er kann auch verwendet werden, um aus dem 1.28 MHz-Rechtecksignal die Grundharmonischeherauszufiltern. Zusätzlich ist noch eine variable Gleichspannungsquelle (bias) eingebaut.
3.5. SPANNUNGSGESTEUERTER OSZILLATOR DCS 297 E 7
Abbildung 3.5: Spannungsgeteuerter Oszillator DCS 297 E.
(1)
(2)
(3)
(4)
Abbildung 3.6: Datentaktregenerator DCS 297 F.
3.5 Spannungsgesteuerter Oszillator DCS 297 E (Abb. 3.5)
Dieses Modul besteht aus einem spannungsgesteuerten Oszillator mit einer Grundfrequenz von1.28 MHz. Es kann die Grundfrequenz mit 0 (1) oder 90 (2) Phasenlage sowie die doppelte
8 KAPITEL 3. DAS VERSUCHSSYSTEM
Grundfrequenz (3) abgegriffen werden.
3.6 Datentaktregenerator DCS 297 F (Abb. 3.6)
Der Datentaktregenerator enthält einem Dioden-Detektor (1), zwei Schwellwertdetektoren (2),einen spannungsgesteuerten Rechteckgenerator (3) mit 40 kHz-, 80 kHz-und 160 kHz-Ausgang so-wie die notwendigen Baublöcke (4) für einen phase-locked loop zur Datentaktrückgewinnung.Hinweis: Bei den Übungen ist es hilfreich die Signale an den Eingängen der Schwellwertdetektorenmittels Oszilloskop zu überprüfen.
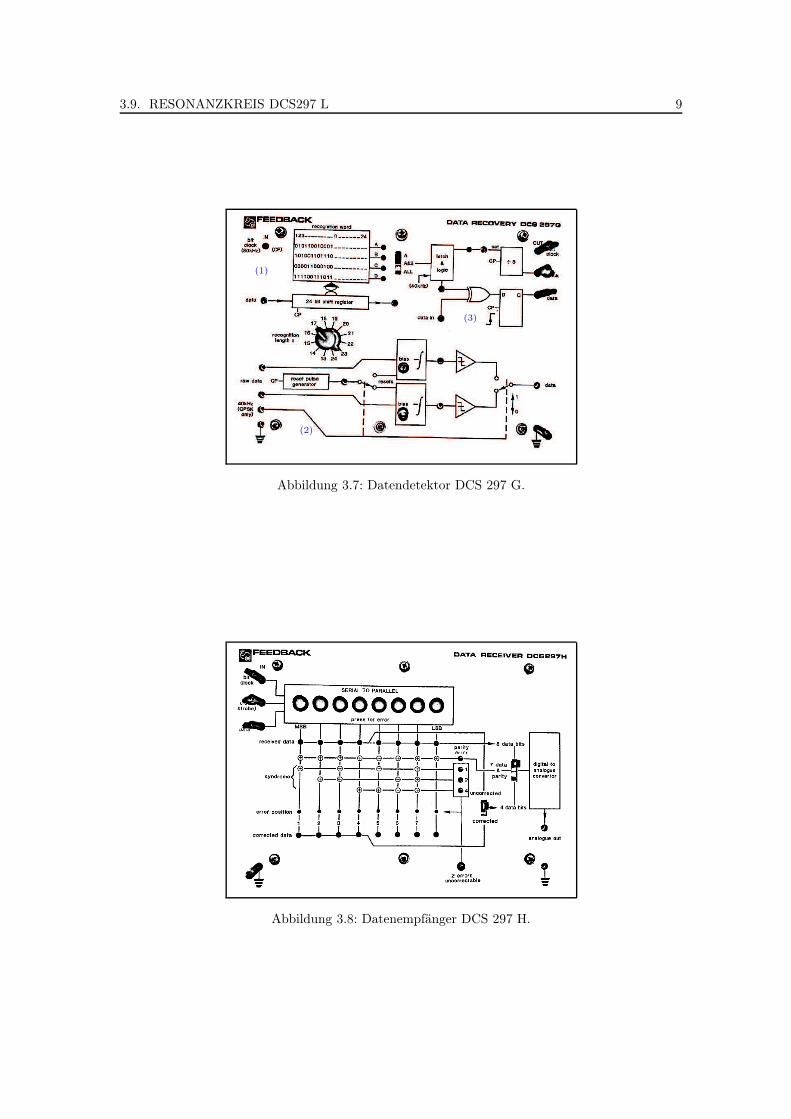
3.7 Datendetektor DCS 297 G (Abb. 3.7)
In dieser Einheit sind zwei integrate and dump-Detektoren (1), die Wortsynchronisation (2) unddie Abtastschaltung (3) zusammengefasst.
3.8 Datenempfänger DCS 297 H (Abb. 3.8)
Der Datenempfänger stellt die übertragenen Datenworte dar (1) und detektiert (2,3) oder kor-rigiert (4) je nach gewähltem Datenformat die während der Übertragung aufgetretenen Fehler.Zusätzlich verfügt die Einheit noch über einen D/A-Wandler (5). Mit diesem Modul lässt sichdie Zuverlässigkeit der Übertragung abschätzen. Zu diesem Zweck wird die Verbindung (11) vonder Datenquelle DCS 297 A (Fig. 3.1) unterbrochen. Als Datenformat eignen sich entweder 7Datenbits + Parity oder 4 Datenbits + 3 Bit fehlerkorrigierender Code + Parity. Zu Beginn derMessung ist das “recognition word” (10) (Fig. 3.1) einzublenden, um das Übertragungssystem zusynchronisieren. Auf Grund der Fehleranzeigen (2) und (3), welche beim Auftreten eines Parity-Fehlers beziehungsweise beim Auftreten von zwei oder mehr Bitfehlern pro codiertem Datenwortansprechen, kann die Zuverlässigkeit der Übertragung kontrolliert werden.
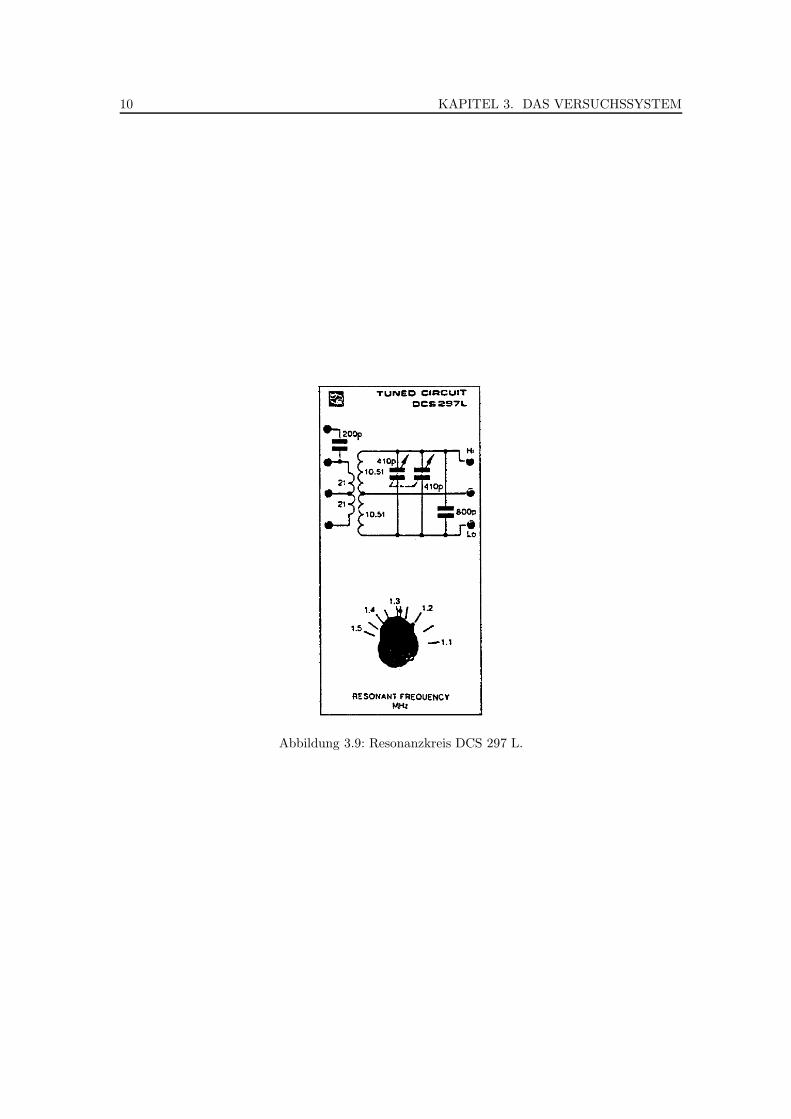
3.9 Resonanzkreis DCS297 L (Abb. 3.9)
Dieser Baublock enthält einen abstimmbaren Resonanzkreis. Er kann als Filter oder als Frequenz-Diskriminator eingesetzt werden.
3.9. RESONANZKREIS DCS297 L 9
(1)
(2)
(3)
Abbildung 3.7: Datendetektor DCS 297 G.
Abbildung 3.8: Datenempfänger DCS 297 H.
10 KAPITEL 3. DAS VERSUCHSSYSTEM
Abbildung 3.9: Resonanzkreis DCS 297 L.
Kapitel 4
Basisbandübertragungssystem
In Basisbandübertragungssystemen entfällt die Modulation eines Trägersignals mit dem zu über-tragenden binären Signal sC(t). Als Sendesignal x(t) dient direkt das codierte Signal sC(t):
x(t) = sC(t) =
∞∑
n=−∞
ang(t− nT ), an ∈ 0, 1 (4.1)
Dabei bezeichnen an das zu übertragende Symbol und T = 1/RC die Symboldauer. In diesemVersuch wird davon ausgegangen, dass die Pulse einen rechteckförmigen Verlauf aufweisen:
g(t) =
1 für |t| ≤ T/2,
0 sonst.(4.2)
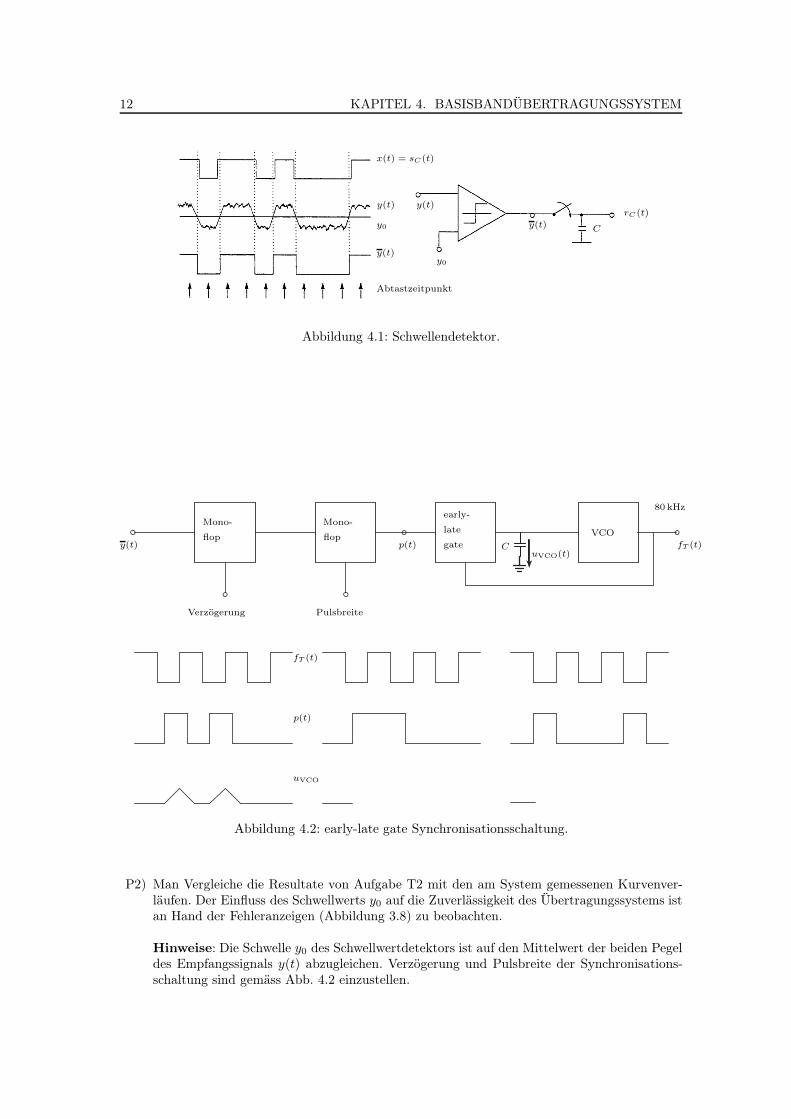
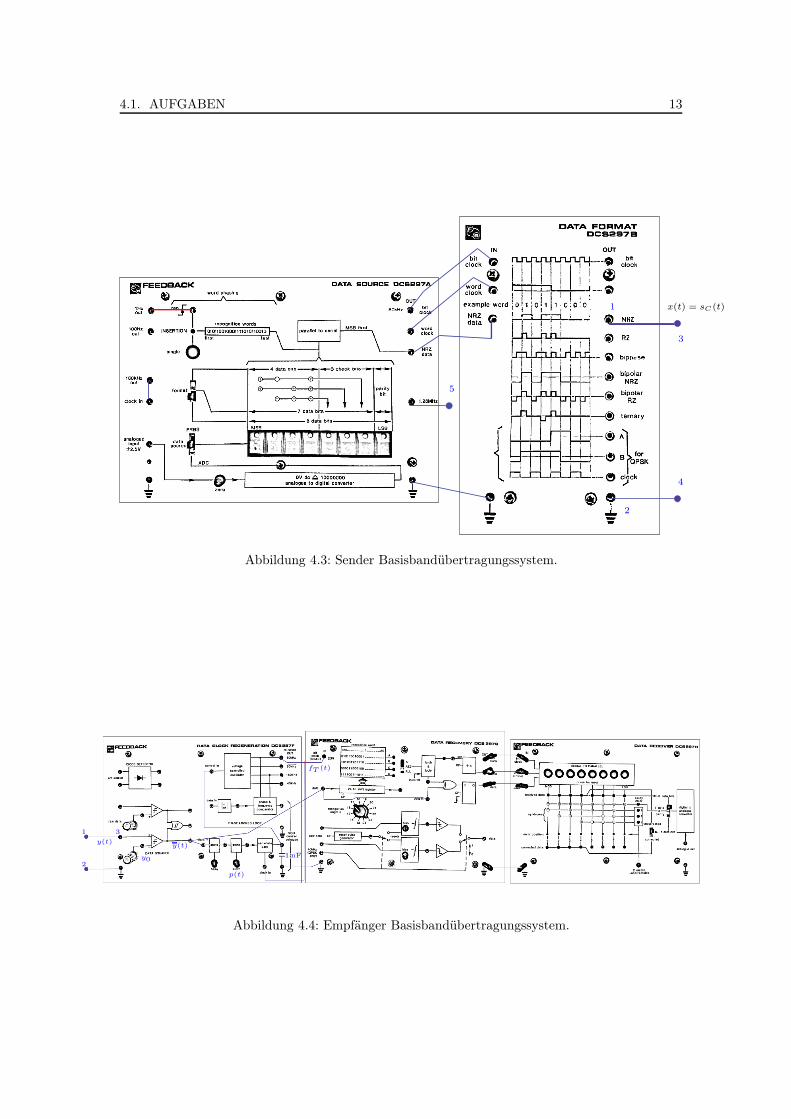
Die Basisbandübertragung ist vorwiegend auf leitungsgebundene Systeme beschränkt. Der Basis-bandempfänger vergleicht das gestörte Empfangssignal y(t) mit einem Schwellwert y0 und tastetdas Differenzsignal ab (Abb. 4.1). Zur Bestimmung der Abtastzeitpunkte muss der Datentaktaus dem empfangenen Signal extrahiert werden. Eine mögliche Lösung für dieses Problem ist dieearly-late gate-Synchronisationsschaltung (Abb. 4.2). Der spannungsgesteuerte Oszillator (VCO)erzeugt ein 80 kHz-Taktsignal fT (t). Dieses Rechtecksignal muss bezüglich Frequenz und Phaseauf den Sendetakt abgestimmt werden. Die beiden Monoflops erzeugen aus dem Signal y(t) diePulsfolge p(t). Verzögerung und Pulsbreite sind so einzustellen, dass die resultierende Pulsbreitemit der Bitdauer übereinstimmt. Das early-late gate entspricht einer spannungsgesteuerten Strom-quelle. Die Pulsfolge p(t) legt fest, ob ein Strom fliesst, und das Taktsignal fT (t) bestimmt dieStromrichtung. Je nach relativer Lage der Pulsfolge p(t) und des Taktsignals fT (t) verändert sichdie Spannung uVCO(t) über der Kapazität. Diese Spannung dient als Regelgrösse für den VCO.Der PLL (phase-locked loop) bewirkt, dass die Spannung über der Kapazität auf einen konstan-ten Wert einregelt und damit Frequenz und Phase des Signals fT (t) dem Sendetakt nachgeführtwerden.Die Abbildungen 4.3 und 4.4 zeigen das Verdrahtungsschema des binären Basisbandübertragungs-systems mit Schwellwertdetektor und Taktrückgewinnung. Zur Wortsynchronisation ist das reco-
gnition word zu übertragen.
4.1 Aufgaben
T1) Die Signalverläufe in Abbildung 4.2 sind zu vervollständigen.
T2) Für den Fall einer fortlaufenden Übertragung des Datenwortes 1011010 ist der Verlauf derSignale sC(t), x(t), y(t), y(t), p(t), uVCO(t), fT (t), rC(t) aufzuzeichnen.
P1) Das Basisbandübertragungssystem gemäss den Abbildungen 4.3 und 4.4 ist aufzubauen.
P2) Man Vergleiche die Resultate von Aufgabe T2 mit den am System gemessenen Kurvenver-läufen. Der Einfluss des Schwellwerts y0 auf die Zuverlässigkeit des Übertragungssystems istan Hand der Fehleranzeigen (Abbildung 3.8) zu beobachten.
Hinweise: Die Schwelle y0 des Schwellwertdetektors ist auf den Mittelwert der beiden Pegeldes Empfangssignals y(t) abzugleichen. Verzögerung und Pulsbreite der Synchronisations-schaltung sind gemäss Abb. 4.2 einzustellen.
Um die Signale dem Übertragungskanal anzupassen, die Mehrfachausnützung eines Kanals zuermöglichen oder die Störfestigkeit zu erhöhen, werden digitale Modulationsverfahren eingesetzt.In ASK-Systemen (amplitude shift keying) (Abb. 5.1 (a)) wird der Träger f(t) in Funktion desBasisbandsignals sC(t) ein- und ausgeschaltet. Der Gegentaktmodulator erzeugt das Sendesignalx(t) durch Multiplikation des Basisbandsignals sC(t) mit dem Trägersignal f(t):
x(t) = sc(t) · f(t) =
A · cos(ω0t) für (n− 1
2 ) ≤ t < T (n+ 12 ), an = 1
0 für (n− 12 ) ≤ t < T (n+ 1
2 ), an = 0(5.1)
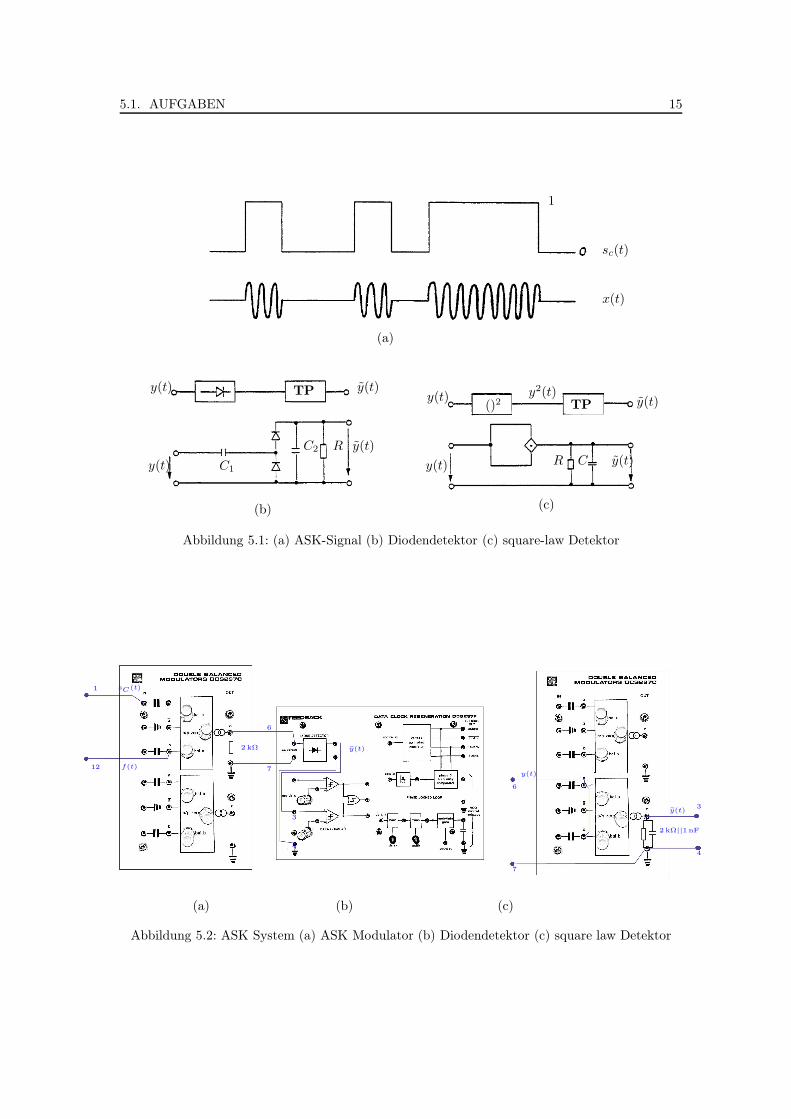
Die Demodulation des empfangenen Signals y(t) kann mit Hilfe eines Dioden- oder eines square-
law -Detektors erfolgen (Abb. 5.1 (b)). Im Dioden-Detektor wird das hochfrequente Signal y(t)gleichgerichtet, und anschliessend werden die hochfrequenten Anteile von einem Tiefpass heraus-gefiltert. Der square-law -Detektor (Abb. 5.1 (c)) quadriert das Signal y(t), bevor es gefiltert wird.Die Weiterverarbeitung des demodulierten Signals y(t) erfolgt analog zur Detektion von Basis-bandsignalen.
5.1 Aufgaben
T3) Das NRZ-Signal sC(t) mit dem Spektrum SC(ω) moduliere die Amplitude eines sinusför-migen Trägersignals f(t) = cos(ω0t). Man bestimme das Spektrum des modulierten SignalsX(ω).
T4) Für den Fall einer fortlaufenden Übertragung des Datenwortes 1011010 ist der Verlauf derSignale sC(t), x(t), y(t), y(t), y(t) sowohl für den Dioden- als auch den square-law Detektoraufzuzeichnen.
P3) Die beiden ASK-Systeme mit Dioden- und square-law Detektor sind gemäss Abbildung 5.2aufzubauen.
P4) Man vergleiche die Resultate von Aufgabe T4 mit den am Versuchssystem gemessenen Kur-venverläufen.
Hinweise: Die Gleichsignalpegel der Gegentaktmodulatoren (Abb. 5.2) sind an den Trimm-potentiometern so einzustellen, dass die Signale nicht begrenzt werden.
Abbildung 5.2: ASK System (a) ASK Modulator (b) Diodendetektor (c) square law Detektor
Kapitel 6
FSK-System
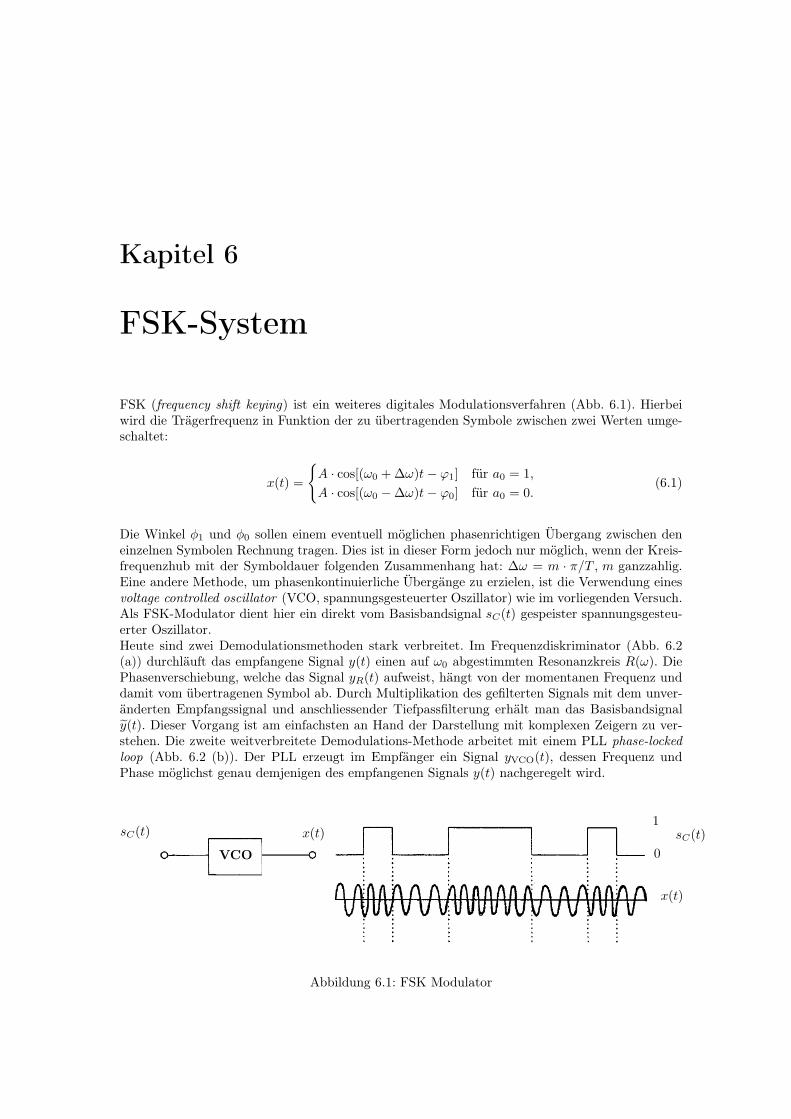
FSK (frequency shift keying) ist ein weiteres digitales Modulationsverfahren (Abb. 6.1). Hierbeiwird die Trägerfrequenz in Funktion der zu übertragenden Symbole zwischen zwei Werten umge-schaltet:
x(t) =
A · cos[(ω0 +∆ω)t− ϕ1] für a0 = 1,
A · cos[(ω0 −∆ω)t− ϕ0] für a0 = 0.(6.1)
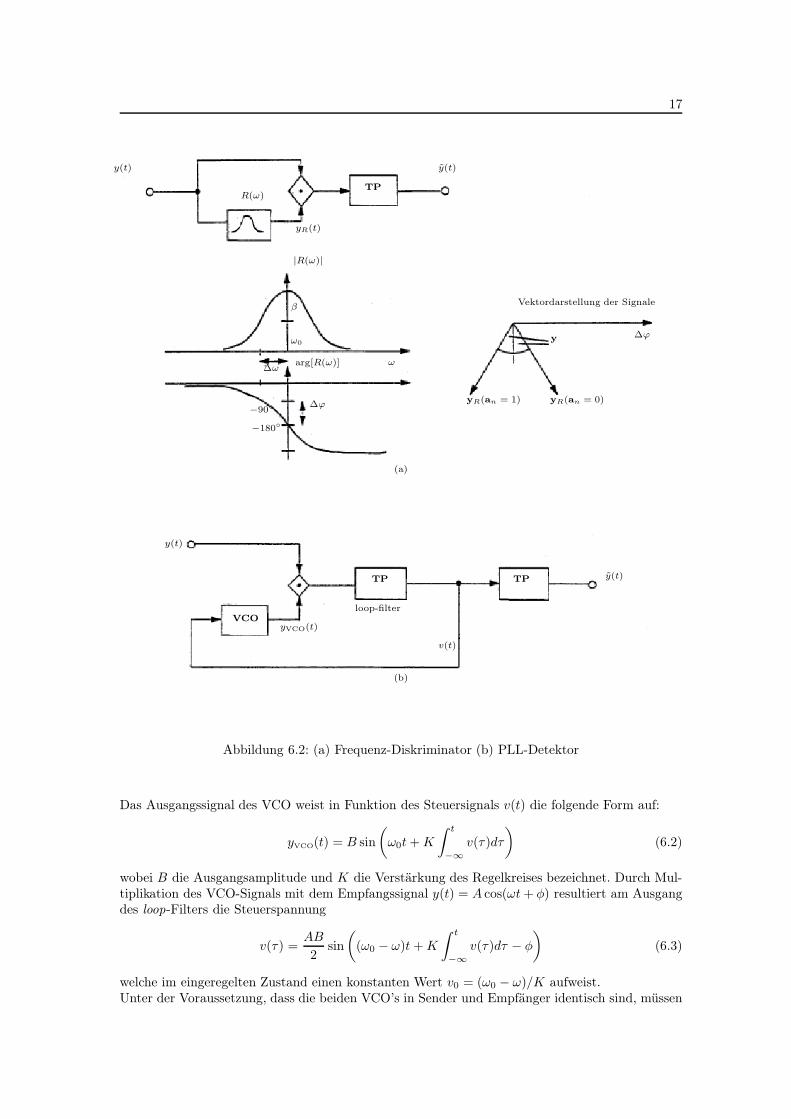
Die Winkel φ1 und φ0 sollen einem eventuell möglichen phasenrichtigen Übergang zwischen deneinzelnen Symbolen Rechnung tragen. Dies ist in dieser Form jedoch nur möglich, wenn der Kreis-frequenzhub mit der Symboldauer folgenden Zusammenhang hat: ∆ω = m · π/T , m ganzzahlig.Eine andere Methode, um phasenkontinuierliche Übergänge zu erzielen, ist die Verwendung einesvoltage controlled oscillator (VCO, spannungsgesteuerter Oszillator) wie im vorliegenden Versuch.Als FSK-Modulator dient hier ein direkt vom Basisbandsignal sC(t) gespeister spannungsgesteu-erter Oszillator.Heute sind zwei Demodulationsmethoden stark verbreitet. Im Frequenzdiskriminator (Abb. 6.2(a)) durchläuft das empfangene Signal y(t) einen auf ω0 abgestimmten Resonanzkreis R(ω). DiePhasenverschiebung, welche das Signal yR(t) aufweist, hängt von der momentanen Frequenz unddamit vom übertragenen Symbol ab. Durch Multiplikation des gefilterten Signals mit dem unver-änderten Empfangssignal und anschliessender Tiefpassfilterung erhält man das Basisbandsignaly(t). Dieser Vorgang ist am einfachsten an Hand der Darstellung mit komplexen Zeigern zu ver-stehen. Die zweite weitverbreitete Demodulations-Methode arbeitet mit einem PLL phase-locked
loop (Abb. 6.2 (b)). Der PLL erzeugt im Empfänger ein Signal yVCO(t), dessen Frequenz undPhase möglichst genau demjenigen des empfangenen Signals y(t) nachgeregelt wird.
Das Ausgangssignal des VCO weist in Funktion des Steuersignals v(t) die folgende Form auf:
yVCO(t) = B sin
(ω0t+K
∫ t
−∞
v(τ)dτ
)(6.2)
wobei B die Ausgangsamplitude und K die Verstärkung des Regelkreises bezeichnet. Durch Mul-tiplikation des VCO-Signals mit dem Empfangssignal y(t) = A cos(ωt+ φ) resultiert am Ausgangdes loop-Filters die Steuerspannung
v(τ) =AB
2sin
((ω0 − ω)t+K
∫ t
−∞
v(τ)dτ − φ
)(6.3)
welche im eingeregelten Zustand einen konstanten Wert v0 = (ω0 − ω)/K aufweist.Unter der Voraussetzung, dass die beiden VCO’s in Sender und Empfänger identisch sind, müssen
18 KAPITEL 6. FSK-SYSTEM
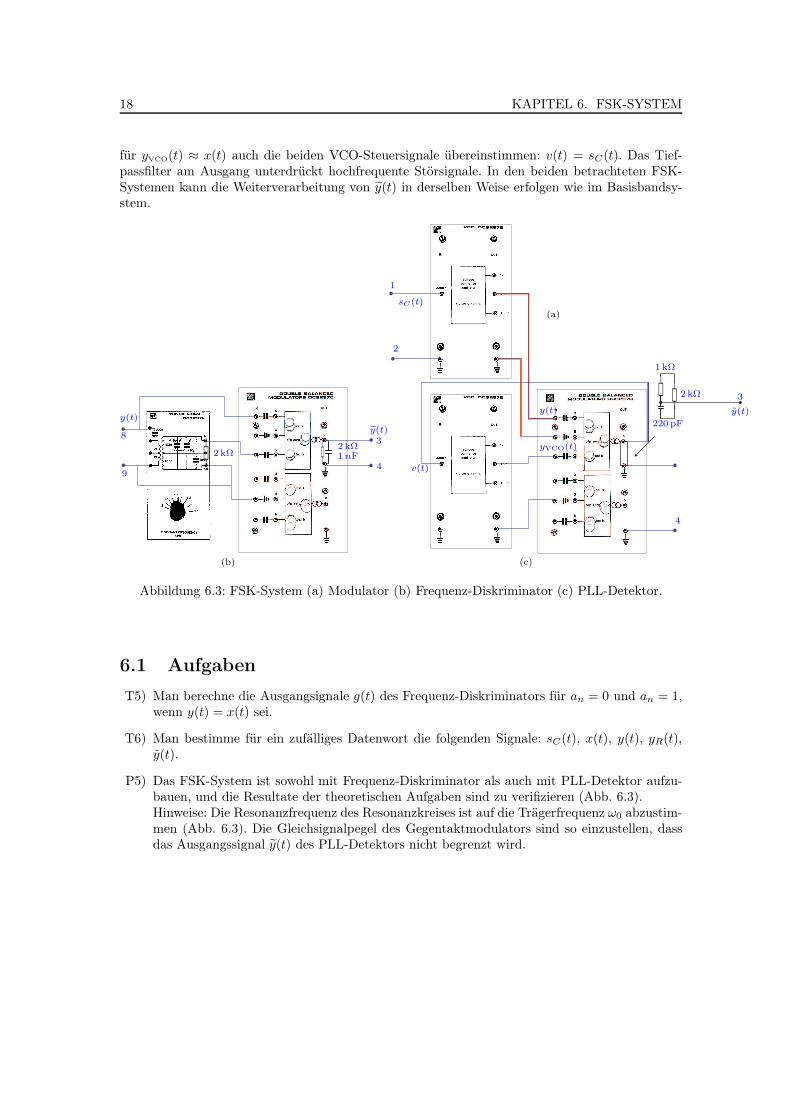
für yVCO(t) ≈ x(t) auch die beiden VCO-Steuersignale übereinstimmen: v(t) = sC(t). Das Tief-passfilter am Ausgang unterdrückt hochfrequente Störsignale. In den beiden betrachteten FSK-Systemen kann die Weiterverarbeitung von y(t) in derselben Weise erfolgen wie im Basisbandsy-stem.
T5) Man berechne die Ausgangsignale g(t) des Frequenz-Diskriminators für an = 0 und an = 1,wenn y(t) = x(t) sei.
T6) Man bestimme für ein zufälliges Datenwort die folgenden Signale: sC(t), x(t), y(t), yR(t),y(t).
P5) Das FSK-System ist sowohl mit Frequenz-Diskriminator als auch mit PLL-Detektor aufzu-bauen, und die Resultate der theoretischen Aufgaben sind zu verifizieren (Abb. 6.3).Hinweise: Die Resonanzfrequenz des Resonanzkreises ist auf die Trägerfrequenz ω0 abzustim-men (Abb. 6.3). Die Gleichsignalpegel des Gegentaktmodulators sind so einzustellen, dassdas Ausgangssignal y(t) des PLL-Detektors nicht begrenzt wird.
Kapitel 7
PSK-System
Bei der PSK-Modulation (phase shift keying) ist die zu übertragende Information in der Pha-se des Trägersignals enthalten. Die einfachste Art, ein binäres PSK-Signal zu erzeugen, ist dieMultiplikation eines sinusförmigen Trägers f(t) = cos(ω0t) mit einem bipolaren Basisbandsignal
x(t) = sC(t) =
∞∑
n=−∞
ang(t− nT ), an ∈ −1,+1 (7.1)
Die Modulation erfolgt wie beim ASK-System mit Hilfe eines Gegentaktmodulators:
x(t) = sC(t) · f(t) (7.2)
=
+A cos(ω0t), T (n− 1/2) ≤ t < T (n+ 1/2), an = +1
+A cos(ω0t− π) = −A cos(ω0t), T (n− 1/2) ≤ t < T (n+ 1/2), an = −1
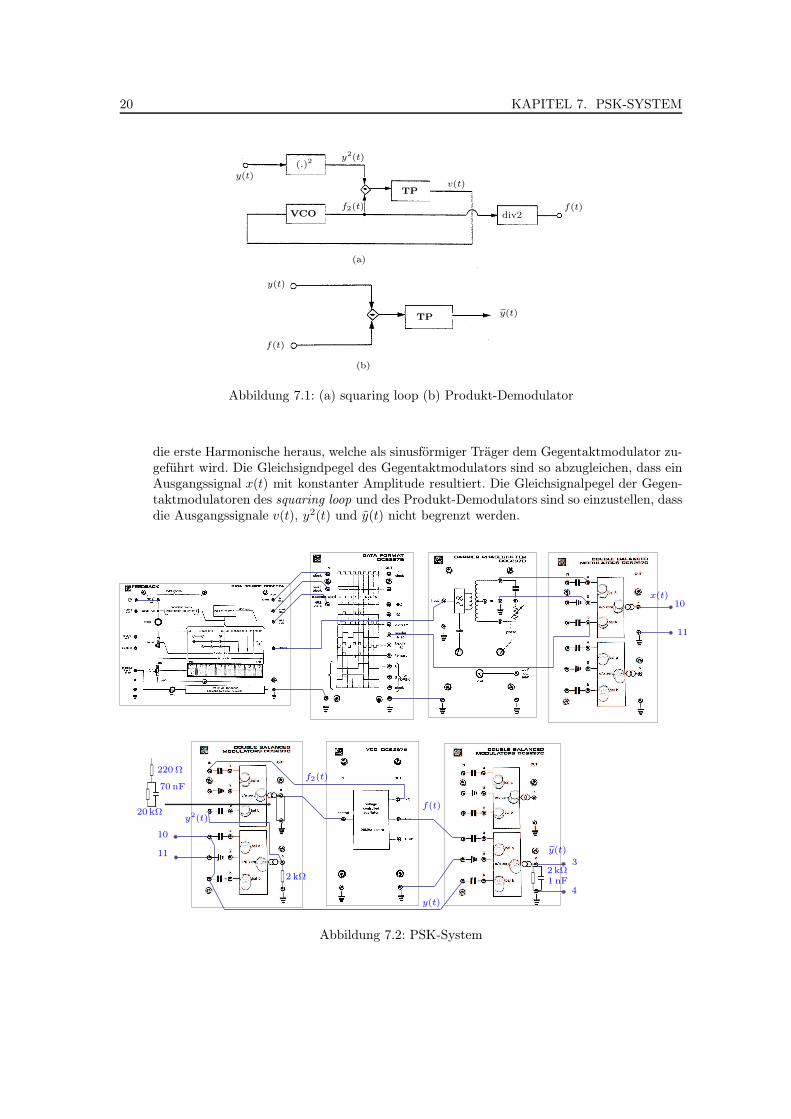
Ein Vorzeichenwechsel der Amplitude entspricht einer Phasenänderung um π. Man erkennt leichtdie enge Verwandschaft dieser PSK-Modulation mit ASK. Im Gegensatz zum ASK-System fehltaber bei PSK die Trägerkomponente im empfangenen Signal. Dies erfordert an Stelle der einfachenDemodulationsverfahren, welche in ASK-Systemen eingesetzt werden, eine synchrone Demodula-tion. Im Empfänger muss dazu ein Signal erzeugt werden, welches in Frequenz und Phase mit demTrägersignal des Senders übereinstimmt. Im squaring loop (Abb. 7.1 (a)) wird das empfangeneSignal y(t) quadriert. Das Signal y2(t) enthält eine Komponente bei der doppelten Trägerfre-quenz 2ω0, welche dem nachfolgenden PLL zugeführt wird. Nach Halbierung der Frequenz desPLL-Ausgangssignals entsteht das für die Demodulation benötigte Signal f(t) = cos(ω0t). DerProdukt-Demodulator (Abb. 7.1 (b)) multipliziert das empfangene Signal y(t) mit dem erzeugtenTrägersignal f(t). Am Ausgang des nachgeschalteten Tiefpass resultiert das gesuchte Basisband-signal y(t). Der Produkt-Demodulator kann auch zur Demodulation von ASK-Signalen eingesetztwerden.
7.1 Aufgaben
T7) Man bestimme für den squaring loop die Signale y2(t), f2(t), f(t) für y(t) = x(t).
T8) Man berechne das Ausgangssignal des Produkt-Demodulators vor und nach dem Tiefpass-Filter.
P6) Man baue das PSK-System auf (Abb. 7.2) und verifiziere die Resultate der theoretischenAufgaben.
Hinweise: Der Phasenschieber (Abb. 7.2) filtert aus dem rechteckförmigen Trägersignal
die erste Harmonische heraus, welche als sinusförmiger Träger dem Gegentaktmodulator zu-geführt wird. Die Gleichsigndpegel des Gegentaktmodulators sind so abzugleichen, dass einAusgangssignal x(t) mit konstanter Amplitude resultiert. Die Gleichsignalpegel der Gegen-taktmodulatoren des squaring loop und des Produkt-Demodulators sind so einzustellen, dassdie Ausgangssignale v(t), y2(t) und y(t) nicht begrenzt werden.