15
Rolf Fischer Elektrische Maschinen 16., aktualisierte Auflage
Fisc
her
Elek
tris
che
Mas
chin
en
Rolf Fischer
Elektrische Maschinen
Dieses Lehrbuch richtet sich an Studierende der Ingenieurwissenschaften sowie in der Praxis tätige Ingenieure. Im Mittelpunkt stehen Aufbau, Wirkungsweise undBetriebsverhalten von elektrischen Maschinen und Transformatoren.
Bei der Behandlung von verschiedenen Motortypen wird die Darstellung derVerfahren zur Drehzahlsteuerung ausführlich behandelt. Hierbei geht es vor allemum den Betrieb von Drehstrom- und Asynchronmaschinen mit frequenzvariablerSpannung. Es werden die jeweils engen Verbindungen zur Leistungselektronikgezeigt und die wichtigsten Stromrichterschaltungen mit ihren speziellenBetriebsbedingungen für die Maschine beschrieben.
Vielen wichtigen Themenbereichen sind eigene Abschnitte gewidmet. So geht das Lehrbuch auf die Kleinmaschinen der verschiedenen Bauarten, Servoantriebemit dauermagneterregten Gleichstrom- und Synchronstrommaschinen sowieSchrittmotoren näher ein.
Der Veranschaulichung des Lernstoffs dienen zahlreiche durchgerechneteBeispiele passend zu den einzelnen Themengebieten. Darüber hinaus sind imAnhang des Buches die Rechengänge zu den Ergebnissen der in den Abschnittengestellten Aufgaben dargestellt.
Die 16. Auflage enthält zahlreiche Aktualisierungen und wurde um weitereThemen ergänzt. Das Buch kann vorlesungsbegleitend eingesetzt werden, dientaber auch als praktisches Nachschlagewerk.
www.hanser-fachbuch.de
€ 29,99 [D] | € 30,90 [A]
ISBN 978-3-446-43813-2
Rolf Fischer
Elektrische Maschinen
16., aktualisierte Auflage
Fischer Elektrische Maschinen
Bleiben Sie auf dem Laufenden!
Hanser Newsletter informieren Sie regel mäßig über neue Bücher und Termine aus den ver-schiedenen Bereichen der Technik. Profitieren Sie auch von Gewinnspielen und exklusiven Leseproben. Gleich anmelden unterwww.hanser-fachbuch.de/newsletter

Rolf Fischer
Elektrische Maschinen
16., aktualisierte Auflage
Mit 448 Bildern, 74 Beispielen, 61 Aufgaben und Lösungen
Autor: Prof. Dr.-Ing. Rolf Fischer Hochschule Esslingen Bibliografische Information der Deutschen Nationalbibliothek Die Deutsche Nationalbibliothek verzeichnet diese Publikation in der Deutschen Nationalbibliografie; detaillierte bibliografische Daten sind im Internet über http://dnb.d-nb.de abrufbar. ISBN: 978-3-446-43813-2 E-Book-ISBN: 978-3-446-43767-8 Dieses Werk ist urheberrechtlich geschützt. Alle Rechte, auch die der Übersetzung, des Nachdruckes und der Vervielfältigung des Buches, oder Teilen daraus, vorbehalten. Kein Teil des Werkes darf ohne schriftliche Genehmigung des Verlages in irgendeiner Form (Fotokopie, Mikrofilm oder ein anderes Verfahren), auch nicht für Zwecke der Unterrichtsgestaltung – mit Ausnahme der in den §§ 53, 54 URG genannten Sonderfälle –, reproduziert oder unter Verwendung elektronischer Systeme verarbeitet, vervielfältigt oder verbreitet werden.
© 2013 Carl Hanser Verlag München Internet: http://www.hanser-fachbuch.de
Lektorat: Mirja Werner, M.A. Herstellung: Dipl.-Ing. Franziska Kaufmann Satz: druckhaus Köthen GmbH Coverconcept: Marc Müller-Bremer, www.rebranding.de, München Coverrealisierung: Stephan Rönigk Druck und Bindung: Friedrich Pustet KG, Regensburg Printed in Germany
Vorwort
Das vorliegende Buch befasst sich mit Aufbau, Wirkungsweise und Betriebsverhaltender elektrischen Maschinen und Transformatoren. Der Maschinenentwurf wird schonaus Platzgründen nicht behandelt. Dieses nur einen kleineren Leserkreis interessierendeFachgebiet, das heute eng mit der EDV verbunden ist, wäre in einem eigenen Buch dar-zustellen. Eine Ausnahme wird bei der Auslegung von Dauermagnetkreisen gemacht,da diese Technik auch das Betriebsverhalten der so erregten Maschine beeinflusst undwachsende Bedeutung erlangt. Um dem Leser jedoch Anhaltspunkte für die möglichenspezifischen Belastungen in den Maschinenteilen zu geben, werden der Begriff der Aus-nutzungsziffer erläutert und, wo immer sinnvoll, Richtwerte für typische Kenngrößenangegeben.
Stoffauswahl und Umfang wurden nach dem Gesichtspunkt festgelegt, ein vorlesungs-begleitendes Buch für das Studium der elektrischen Maschinen während der Ingenieur-ausbildung anzubieten. Daneben soll es aber auch dem in der Praxis stehenden Inge-nieur bei der Auffrischung und Vertiefung seiner Fachkenntnisse von Nutzen sein.Vorausgesetzt sind die Höhere Mathematik der ersten Semester, die komplexe Rech-nung und die allgemeinen Grundlagen der Elektrotechnik.
Auf die Behandlung so spezieller Maschinentypen wie z. B. Repulsionsmotoren oderdie Drehstrom-Kommutatormaschinen, die keine Bedeutung mehr besitzen, wird ver-zichtet. Dagegen erhalten die Kleinmaschinen der verschiedenen Bauarten, die wie z. B.Universalmotoren in sehr großen Stückzahlen pro Jahr gefertigt werden, in den jeweili-gen Hauptkapiteln eigene Abschnitte. Das Gleiche gilt für besondere Bauformen wiedie Linearmotoren oder den Turbogenerator großer Leistung.
Besonderer Wert ist auf die Darstellung der Methoden zur Drehzahlsteuerung gelegt,wobei hier eingehend die Verbindungen zur Leistungselektronik gezeigt und die dabeiauftretenden Maschinenprobleme behandelt werden.
Zur Kennzeichnung der Größen sind in der Regel die Formelzeichen nach DIN 1304Teil 1 und Teil 7 verwendet; eine Liste aller Zeichen mit ihrer Bedeutung ist im Anhangenthalten. Bezugspfeile werden bei allen Anschlüssen nach dem Verbraucherpfeil-system gesetzt. Ein ausführliches Literaturverzeichnis ermöglicht bei vielen Teilgebieteneinen ersten Zugang zu weiterführenden, speziellen Veröffentlichungen.
Rolf Fischer
Vorwort zur 16. Auflage
Der Verfasser sieht den Umfang des Lehrbuchs Elektrische Maschinen inzwischen alsweitgehend abgeschlossen an. Es bleibt aber – wie schon bei früheren Auflagen – im-mer das Bestreben, neue Techniken und aktuelle Fragestellungen aufzunehmen, wasden Seitenumfang dann doch etwas erweitert. In diesem Sinne sind daher in die neueAuflage folgende Themen aufgenommen:
Abschnitt 1.2.2Entwicklungen auf dem Gebiet der Elektrobleche
Abschnitt 3.1.3Auslegung von Transformatoren für erhöhte Frequenz.Energieeinsparung bei Verteilertransformatoren durch amorphe Eisenkerne.
Abschnitt 5.3.3Anlaufwärme bei Käfigläufermotoren auch mit Drehstromsteller.
Der Verfasser hofft, dass die Elektrischen Maschinen für die Kollegen an den Hoch-schulen, den Praktikern in Industrie und Gewerbe sowie natürlich den Studierendender verschiedenen Ingenieurwissenschaften weiterhin eine verlässliche Hilfe bieten.
Alle Hinweise und Anregungen werden von jeder Seite sehr dankbar angenommen undnach Möglichkeit integriert. Bei meinem Fachnachfolger Prof. Dr.-Ing. E. Nolle ist die-se wertvolle Unterstützung schon dankbare Tradition.
Die beste Zusammenarbeit mit dem Carl Hanser Verlag, jetzt vertreten durch den Fach-buchverlag Leipzig, währt nun schon über vier Jahrzehnte mit natürlich wechselndenMitarbeitern. Diesmal gilt mein Dank für die Betreuung Frau M.Werner M.A. (Lekto-rat) und wieder Frau Dipl.-Ing. F. Kaufmann (Herstellung).
Esslingen, Frühjahr 2013 Rolf Fischer
Inhaltsverzeichnis
1 Allgemeine Grundlagen elektrischer Maschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.1 Prinzipien elektrischer Maschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.1.1 Vorgaben im Elektromaschinenbau . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 111.1.2 Energiewandlung und Bezugspfeile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.1.3 Bauarten und Gliederung elektrischer Maschinen . . . . . . . . . . . . . . . . . . . . . . . . . . 151.1.4 Leistung und Bauvolumen elektrischer Maschinen . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.2 Der magnetische Kreis elektrischer Maschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.2.1 Aufbau magnetischer Kreise. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 191.2.2 Elektrobleche und Eisenverluste. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 211.2.3 Spannungen und Kräfte im Magnetfeld. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 251.2.4 Der magnetische Kreis mit Dauermagneten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
2 Gleichstrommaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.1 Aufbau und Bauteile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.1.1 Prinzipieller Aufbau. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 332.1.2 Bauteile einer Gleichstrommaschine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 362.1.3 Ankerwicklungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 382.1.4 Dauermagneterregte Kleinmaschinen und Sonderbauformen . . . . . . . . . . . . . . . . . 45
2.2 Luftspaltfelder und Betriebsverhalten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482.2.1 Erregerfeld und Ankerrückwirkung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482.2.2 Spannungserzeugung und Drehmoment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 522.2.3 Stromwendung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 572.2.4 Wendepole und Kompensationswicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
2.3 Kennlinien und Steuerung von Gleichstrommaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . 652.3.1 Anschlussbezeichnungen und Schaltbilder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 652.3.2 Kennlinien von Gleichstrommaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 672.3.3 Verfahren zur Drehzahländerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 752.3.4 Dynamisches Verhalten von Gleichstrommaschinen . . . . . . . . . . . . . . . . . . . . . . . . 82
2.4 Stromrichterbetrieb von Gleichstrommaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 832.4.1 Netzgeführte Stromrichterantriebe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 832.4.2 Antriebe mit Gleichstromsteller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 872.4.3 Probleme der Stromrichterspeisung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 90
3 Transformatoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
3.1 Aufbau und Bauformen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1013.1.1 Eisenkerne von Wechsel- und Drehstromtransformatoren. . . . . . . . . . . . . . . . . . . . 1013.1.2 Wicklungen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1043.1.3 Wachstumsgesetze und Kühlung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
3.2 Betriebsverhalten von Einphasentransformatoren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1133.2.1 Spannungsgleichungen und Ersatzschaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1133.2.2 Leerlauf und Magnetisierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117

3.2.3 Verhalten bei Belastung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1223.2.4 Kurzschluss des Transformators . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1253.2.5 Transformatorgeräusche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 129
3.3 Betriebsverhalten von Drehstromtransformatoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
3.3.1 Schaltzeichen und Schaltgruppen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1303.3.2 Schaltgruppen bei unsymmetrischer Belastung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1323.3.3 Direkter Parallelbetrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 136
3.4 Sondertransformatoren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 138
3.4.1 Änderung der Übersetzung und der Strangzahl . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1383.4.2 Kleintransformatoren und Messwandler . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1393.4.3 Spartransformatoren und Drosselspulen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 140
4 Allgemeine Grundlagen der Drehstrommaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
4.1 Drehstromwicklungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 146
4.1.1 Ausführungsformen einer Drehstromwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1464.1.2 Wicklungsfaktoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 149
4.2 Umlaufende Magnetfelder. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 155
4.2.1 Durchflutung und Feld eines Wicklungsstranges . . . . . . . . . . . . . . . . . . . . . . . . . . . 1554.2.2 Drehfelder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1584.2.3 Blindwiderstände einer Drehstromwicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1654.2.4 Spannungserzeugung und Drehmoment. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 167
4.3 Symmetrische Komponenten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 169
4.3.1 Drehstromsystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1694.3.2 Zweiphasensystem . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172
5 Asynchronmaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
5.1 Aufbau und Wirkungsweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 175
5.1.1 Ständer und Läufer der Asynchronmaschine. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1755.1.2 Asynchrones Drehmoment und Frequenzumformung . . . . . . . . . . . . . . . . . . . . . . . 1775.1.3 Drehtransformatoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181
5.2 Darstellung der Betriebseigenschaften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 184
5.2.1 Spannungsgleichungen und Ersatzschaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1845.2.2 Einzelleistungen und Drehmomente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1865.2.3 Stromortskurve . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1925.2.4 Betriebsbereiche und Kennlinien . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2025.2.5 Drehmomente und Kräfte der Oberfelder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 204
5.3 Steuerung von Drehstrom-Asynchronmaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 212
5.3.1 Verfahren zur Drehzahländerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2125.3.2 Ersatzschaltung und Betrieb mit frequenzvariabler Spannung . . . . . . . . . . . . . . . . 2195.3.3 Anlass- und Bremsverfahren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2285.3.4 Unsymmetrische Betriebszustände . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2375.3.5 Dynamisches Verhalten von Asynchronmaschinen . . . . . . . . . . . . . . . . . . . . . . . . . 242
8 Inhaltsverzeichnis
5.4 Stromrichterbetrieb von Asynchronmaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 245
5.4.1 Spannungsänderung mit Drehstromstellern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2455.4.2 Untersynchrone Stromrichterkaskade. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2495.4.3 Einsatz von Frequenzumrichtern . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2545.4.4 Motorrückwirkung bei Umrichterbetrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 260
5.5 Spezielle Bauformen und Betriebsarten der Asynchronmaschine. . . . . . . . . . . . . . . . . . . 262
5.5.1 Stromverdrängungs- und Doppelstabläufer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2625.5.2 Linearmotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2655.5.3 Asynchrongeneratoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2695.5.4 Die elektrische Welle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2715.5.5 Doppeltgespeiste Schleifringläufermotoren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2725.5.6 Energiesparmotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 274
5.6 Einphasige Asynchronmaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 279
5.6.1 Einphasenmotoren ohne Hilfswicklung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2795.6.2 Einphasenmotoren mit Kondensatorhilfswicklung . . . . . . . . . . . . . . . . . . . . . . . . . . 2815.6.3 Einphasenmotoren mit Widerstandshilfswicklung . . . . . . . . . . . . . . . . . . . . . . . . . . 2865.6.4 Der Drehstrommotor am Wechselstromnetz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2885.6.5 Spaltpolmotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 292
6 Synchronmaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295
6.1 Aufbau von Synchronmaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 295
6.1.1 Bauformen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2956.1.2 Erregersysteme . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2996.1.3 Synchronmaschinen mit Dauermagneterregung . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3036.1.4 Synchronmaschinen mit Zahnspulenwicklungen . . . . . . . . . . . . . . . . . . . . . . . . . . . 306
6.2 Betriebsverhalten der Vollpolmaschine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 308
6.2.1 Erregerfeld und Ankerrückwirkung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3086.2.2 Zeigerdiagramm und Ersatzschaltung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3126.2.3 Synchronmaschinen im Alleinbetrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3136.2.4 Synchronmaschinen im Netzbetrieb. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3216.2.5 Besonderheiten der Schenkelpolmaschine. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 327
6.3 Verhalten der Synchronmaschine im nichtstationären Betrieb . . . . . . . . . . . . . . . . . . . . . 334
6.3.1 Drehzahlsteuerung und Stromrichterbetrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3346.3.2 Pendelungen und unsymmetrische Belastung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3386.3.3 Die Synchronmaschine in Zweiachsendarstellung . . . . . . . . . . . . . . . . . . . . . . . . . . 3416.3.4 Stoßkurzschluss . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 345
6.4 Spezielle Bauarten von Synchronmaschinen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 349
6.4.1 Turbogeneratoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3496.4.2 Die Einphasen-Synchronmaschine . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3526.4.3 Betriebsverhalten dauermagneterregter Synchronmotoren. . . . . . . . . . . . . . . . . . . . 3526.4.4 Synchrone Langstator-Linearmotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3576.4.5 Transversalflussmotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 359
6.5 Synchrone Kleinmaschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363
6.5.1 Reluktanzmotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3636.5.2 Hysteresemotoren. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3666.5.3 Schrittmotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 368
Inhaltsverzeichnis 9
7 Stromwendermaschinen für Wechsel- und Drehstrom . . . . . . . . . . . . . . . . . . . . . . . . . 373
7.1 Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373
7.2 Universalmotoren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 375
7.2.1 Aufbau und Einsatz . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3757.2.2 Ersatzschaltung und Zeigerdiagramm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3767.2.3 Verfahren der Drehzahländerung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3797.2.4 Stromwendung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 380
8 Betriebsbedingungen elektrischer Maschinen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 384
8.1 Elektrotechnische Normung und Vorschriften . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3848.2 Bauformen und Schutzarten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3878.3 Explosionsgeschützte Ausführungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3908.4 Verluste, Erwärmung und Kühlung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3938.5 Betriebsarten und Leistungsschildangaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 399
9 Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405
Schrifttum. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 405
Formelzeichen und Einheiten. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 412
Berechnung der Aufgaben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416
Sachwortverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 421
10 Inhaltsverzeichnis
1 Allgemeine Grundlagen elektrischer Maschinen
1.1 Prinzipien elektrischer Maschinen
1.1.1 Vorgaben im Elektromaschinenbau
Bedeutung und Vorgaben. Elektrische Maschinen sind in der Ausführung als
– Generatoren die Grundlage fast der gesamten Erzeugung elektrischer Energie inWärme-, Wasser- und Windkraftanlagen eines Landes.
– Motoren ein entscheidendes Betriebsmittel aller Produktion in Industrie und Gewerbesowie Bestandteil vieler Konsumgüter.
Der Zentralverband Elektrotechnik- und Elektronikindustrie e.V. (ZVEI) gibt für dasJahr 2005 ein Produktionsvolumen für das gesamte Gebiet der elektrischen Antriebs-technik im Wert von ca. 6,8 Milliarden Euro an. Darin sind die verschiedenen Bereichemit den folgenden Anteilen beteiligt.
36,8% – Kleinmotoren26,6% – Drehstrommotoren19,3% – Antriebsstromrichter15,8% – Sonstige Motoren, Zubehör1,5% – Gleichstrommaschinen
Nimmt man die Kraftwerkstechnik hinzu, so entsteht vom winzigen Schrittmotor ineiner Quarzuhr mit einer Leistung von ca. 10 lW bis zu den größten Drehstromgene-ratoren von über 1000 MW eine geschlossene Leistungsreihe von 14 Zehnerpotenzen.Dazwischen liegen mit Stückzahlen von meist mehreren Millionen pro Jahr die Klein-maschinen der verschiedenen Bauarten, wie z. B. die dauermagneterregten Gleich-strom-Hilfsantriebe im Kfz oder die Universalmotoren in Elektrowerkzeugen oderHausgeräten. Industrieantriebe werden heute fast immer als Drehstrommotoren listen-mäßig bis etwa 1000 kW angeboten, darüber hinaus fertigt man Sondermotoren bisca. 30 MW. Auch bei Generatoren reicht die Fertigung von Millionen Lichtmaschinenpro Jahr über autarke, transportable Stromversorgungsanlagen (Notstromaggregate) abeinigen kVA, über Generatoren für Windrotoren, Blockheizkraftwerke und Staustufenin Flüssen bis in den MVA-Bereich und zu Großmaschinen für Wasser- und Wärme-kraftwerke.
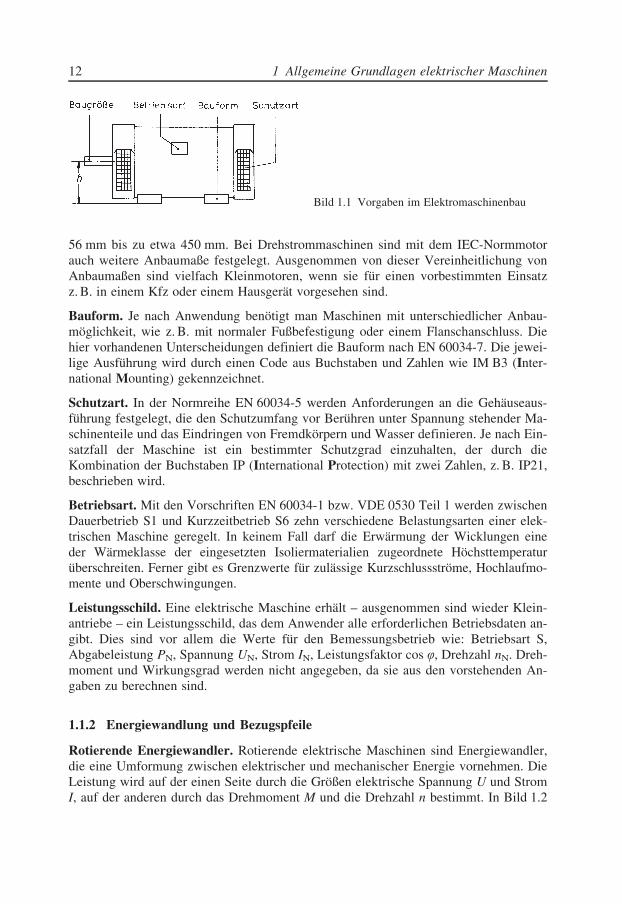
Beim Bau von elektrischen Maschinen muss der Entwickler eine Vielzahl von Normenund Vorschriften beachten. Sie betreffen die zulässige Ausnutzung der verwendetenMaterialien, einzelne Betriebsdaten und vor allem auch die äußere Gestaltung. DieseVorgaben sind heute fast alle Inhalt von Europanormen EN und werden in Kapitel 8 zu-mindest in den Grundzügen aufgeführt. In Bild 1.1 sind die wichtigsten Vorgaben imBezug zur Maschine dargestellt.
Baugröße. Zur Vereinheitlichung von Anbaumaßen und damit einer allgemeinen Aus-tauschbarkeit werden vor allem die Industrieantriebe der Serienfertigung nur in abge-stuften Baugrößen gefertigt. Als Bezugswert gilt die Achshöhe h in Abstufungen von
56 mm bis zu etwa 450 mm. Bei Drehstrommaschinen sind mit dem IEC-Normmotorauch weitere Anbaumaße festgelegt. Ausgenommen von dieser Vereinheitlichung vonAnbaumaßen sind vielfach Kleinmotoren, wenn sie für einen vorbestimmten Einsatzz. B. in einem Kfz oder einem Hausgerät vorgesehen sind.
Bauform. Je nach Anwendung benötigt man Maschinen mit unterschiedlicher Anbau-möglichkeit, wie z. B. mit normaler Fußbefestigung oder einem Flanschanschluss. Diehier vorhandenen Unterscheidungen definiert die Bauform nach EN 60034-7. Die jewei-lige Ausführung wird durch einen Code aus Buchstaben und Zahlen wie IM B3 (Inter-national Mounting) gekennzeichnet.
Schutzart. In der Normreihe EN 60034-5 werden Anforderungen an die Gehäuseaus-führung festgelegt, die den Schutzumfang vor Berühren unter Spannung stehender Ma-schinenteile und das Eindringen von Fremdkörpern und Wasser definieren. Je nach Ein-satzfall der Maschine ist ein bestimmter Schutzgrad einzuhalten, der durch dieKombination der Buchstaben IP (International Protection) mit zwei Zahlen, z. B. IP21,beschrieben wird.
Betriebsart. Mit den Vorschriften EN 60034-1 bzw. VDE 0530 Teil 1 werden zwischenDauerbetrieb S1 und Kurzzeitbetrieb S6 zehn verschiedene Belastungsarten einer elek-trischen Maschine geregelt. In keinem Fall darf die Erwärmung der Wicklungen eineder Wärmeklasse der eingesetzten Isoliermaterialien zugeordnete Höchsttemperaturüberschreiten. Ferner gibt es Grenzwerte für zulässige Kurzschlussströme, Hochlaufmo-mente und Oberschwingungen.
Leistungsschild. Eine elektrische Maschine erhält – ausgenommen sind wieder Klein-antriebe – ein Leistungsschild, das dem Anwender alle erforderlichen Betriebsdaten an-gibt. Dies sind vor allem die Werte für den Bemessungsbetrieb wie: Betriebsart S,Abgabeleistung PN, Spannung UN, Strom IN, Leistungsfaktor cos u, Drehzahl nN. Dreh-moment und Wirkungsgrad werden nicht angegeben, da sie aus den vorstehenden An-gaben zu berechnen sind.
1.1.2 Energiewandlung und Bezugspfeile
Rotierende Energiewandler. Rotierende elektrische Maschinen sind Energiewandler,die eine Umformung zwischen elektrischer und mechanischer Energie vornehmen. DieLeistung wird auf der einen Seite durch die Größen elektrische Spannung U und StromI, auf der anderen durch das Drehmoment M und die Drehzahl n bestimmt. In Bild 1.2
12 1 Allgemeine Grundlagen elektrischer Maschinen
Bild 1.1 Vorgaben im Elektromaschinenbau
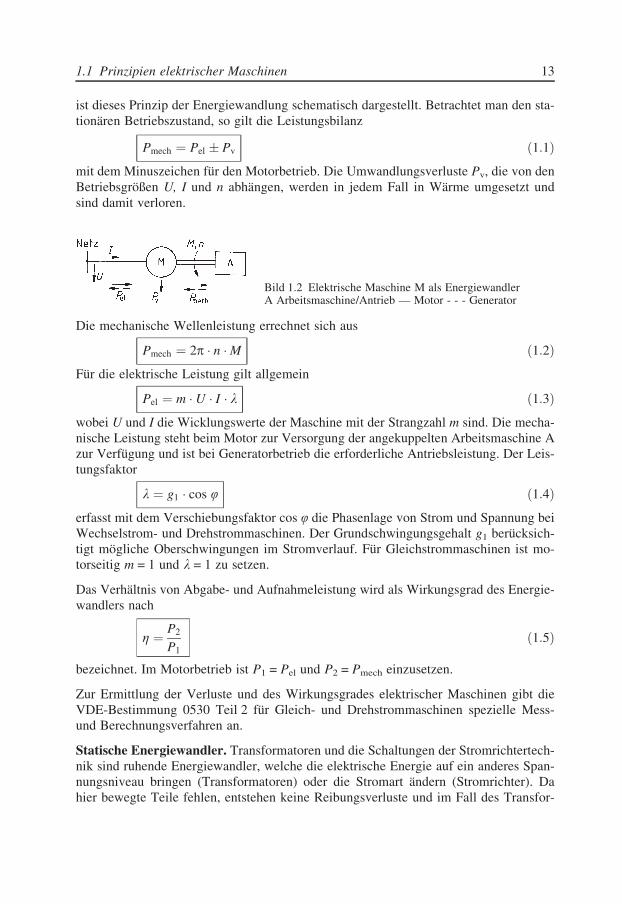
ist dieses Prinzip der Energiewandlung schematisch dargestellt. Betrachtet man den sta-tionären Betriebszustand, so gilt die Leistungsbilanz
Pmech ¼ Pel Pv ð1:1Þmit dem Minuszeichen für den Motorbetrieb. Die Umwandlungsverluste Pv, die von denBetriebsgrößen U, I und n abhängen, werden in jedem Fall in Wärme umgesetzt undsind damit verloren.
Die mechanische Wellenleistung errechnet sich aus
Pmech ¼ 2p n M ð1:2ÞFür die elektrische Leistung gilt allgemein
Pel ¼ m U I k ð1:3Þwobei U und I die Wicklungswerte der Maschine mit der Strangzahl m sind. Die mecha-nische Leistung steht beim Motor zur Versorgung der angekuppelten Arbeitsmaschine Azur Verfügung und ist bei Generatorbetrieb die erforderliche Antriebsleistung. Der Leis-tungsfaktor
k ¼ g1 cos u ð1:4Þerfasst mit dem Verschiebungsfaktor cos u die Phasenlage von Strom und Spannung beiWechselstrom- und Drehstrommaschinen. Der Grundschwingungsgehalt g1 berücksich-tigt mögliche Oberschwingungen im Stromverlauf. Für Gleichstrommaschinen ist mo-torseitig m = 1 und k = 1 zu setzen.
Das Verhältnis von Abgabe- und Aufnahmeleistung wird als Wirkungsgrad des Energie-wandlers nach
g ¼ P2P1
ð1:5Þ
bezeichnet. Im Motorbetrieb ist P1 = Pel und P2 = Pmech einzusetzen.
Zur Ermittlung der Verluste und des Wirkungsgrades elektrischer Maschinen gibt dieVDE-Bestimmung 0530 Teil 2 für Gleich- und Drehstrommaschinen spezielle Mess-und Berechnungsverfahren an.
Statische Energiewandler. Transformatoren und die Schaltungen der Stromrichtertech-nik sind ruhende Energiewandler, welche die elektrische Energie auf ein anderes Span-nungsniveau bringen (Transformatoren) oder die Stromart ändern (Stromrichter). Dahier bewegte Teile fehlen, entstehen keine Reibungsverluste und im Fall des Transfor-
1.1 Prinzipien elektrischer Maschinen 13
Bild 1.2 Elektrische Maschine M als EnergiewandlerA Arbeitsmaschine/Antrieb — Motor - - - Generator
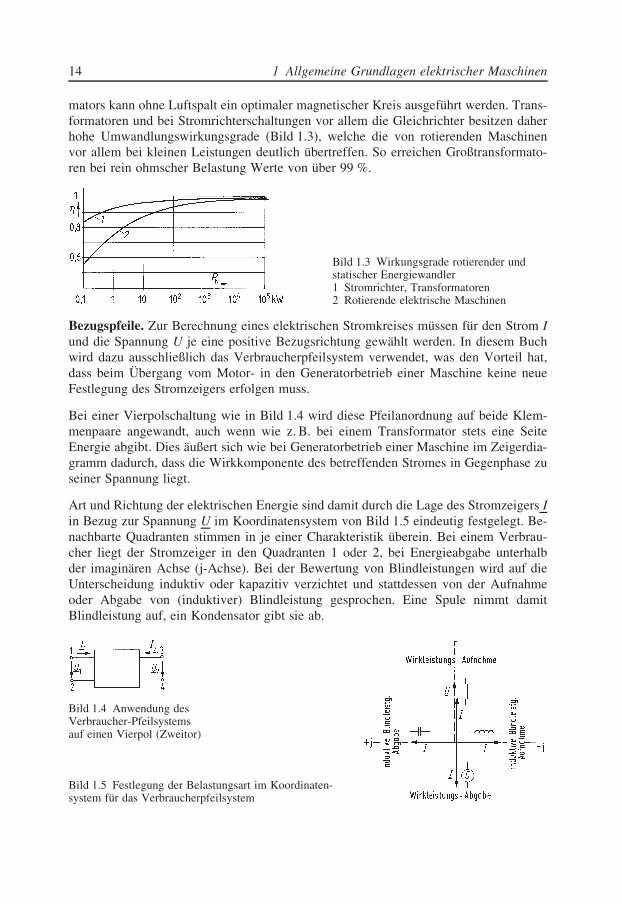
mators kann ohne Luftspalt ein optimaler magnetischer Kreis ausgeführt werden. Trans-formatoren und bei Stromrichterschaltungen vor allem die Gleichrichter besitzen daherhohe Umwandlungswirkungsgrade (Bild 1.3), welche die von rotierenden Maschinenvor allem bei kleinen Leistungen deutlich übertreffen. So erreichen Großtransformato-ren bei rein ohmscher Belastung Werte von über 99 %.
Bezugspfeile. Zur Berechnung eines elektrischen Stromkreises müssen für den Strom Iund die Spannung U je eine positive Bezugsrichtung gewählt werden. In diesem Buchwird dazu ausschließlich das Verbraucherpfeilsystem verwendet, was den Vorteil hat,dass beim Übergang vom Motor- in den Generatorbetrieb einer Maschine keine neueFestlegung des Stromzeigers erfolgen muss.
Bei einer Vierpolschaltung wie in Bild 1.4 wird diese Pfeilanordnung auf beide Klem-menpaare angewandt, auch wenn wie z. B. bei einem Transformator stets eine SeiteEnergie abgibt. Dies äußert sich wie bei Generatorbetrieb einer Maschine im Zeigerdia-gramm dadurch, dass die Wirkkomponente des betreffenden Stromes in Gegenphase zuseiner Spannung liegt.
Art und Richtung der elektrischen Energie sind damit durch die Lage des Stromzeigers Iin Bezug zur Spannung U im Koordinatensystem von Bild 1.5 eindeutig festgelegt. Be-nachbarte Quadranten stimmen in je einer Charakteristik überein. Bei einem Verbrau-cher liegt der Stromzeiger in den Quadranten 1 oder 2, bei Energieabgabe unterhalbder imaginären Achse (j-Achse). Bei der Bewertung von Blindleistungen wird auf dieUnterscheidung induktiv oder kapazitiv verzichtet und stattdessen von der Aufnahmeoder Abgabe von (induktiver) Blindleistung gesprochen. Eine Spule nimmt damitBlindleistung auf, ein Kondensator gibt sie ab.
14 1 Allgemeine Grundlagen elektrischer Maschinen
Bild 1.3 Wirkungsgrade rotierender undstatischer Energiewandler1 Stromrichter, Transformatoren2 Rotierende elektrische Maschinen
Bild 1.4 Anwendung desVerbraucher-Pfeilsystemsauf einen Vierpol (Zweitor)
Bild 1.5 Festlegung der Belastungsart im Koordinaten-system für das Verbraucherpfeilsystem

















