Entscheidungsbaum-Lernen Perzeptron-Lernen Einf¨ uhrung in die Angewandte Informatik IV: Ged¨ achtnis und Lernen Ute Schmid Fakult¨ at WIAI, Otto-Friedrich Universit¨ at Bamberg Angewandte Informatik/Kognitive Systeme Letzte ¨ Anderung 6. Mai 2014 Ute Schmid Einf¨ uhrung in die Angewandte Informatik
Transcript
Entscheidungsbaum-LernenPerzeptron-Lernen
Einfuhrung in die Angewandte InformatikIV: Gedachtnis und Lernen
Ute Schmid
Fakultat WIAI, Otto-Friedrich Universitat Bamberg
Angewandte Informatik/Kognitive Systeme
Letzte Anderung 6. Mai 2014
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Erinnerung: Kognitive Systeme
Intelligente Computer- oder Roboterprogramme
Wissensreprasentation und -verarbeitung basiert auf ahnlichenPrinzipien wie menschliche Kognition
Berucksichtigung psychologischer Theorien und empirischerBefunde
Intelligente Systeme basieren nicht auf einfachenReiz-Reaktions-Schaltungen sondern erlauben flexible undadaptive Informationsverarbeitung
ProblemlosenLernen
Ute Schmid Einfuhrung in die Angewandte Informatik
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
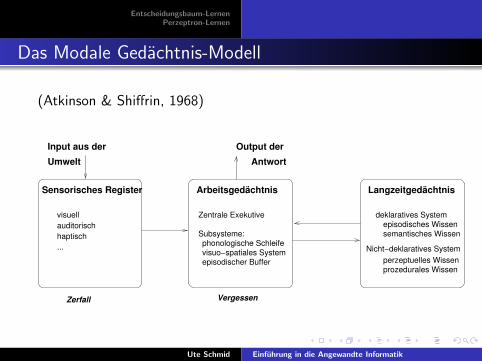
Sensorisches Register
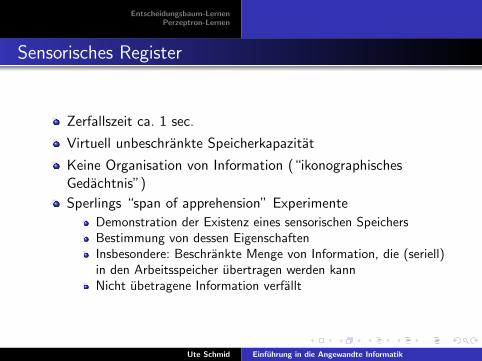
Zerfallszeit ca. 1 sec.
Virtuell unbeschrankte Speicherkapazitat
Keine Organisation von Information (“ikonographischesGedachtnis”)
Sperlings “span of apprehension” Experimente
Demonstration der Existenz eines sensorischen SpeichersBestimmung von dessen EigenschaftenInsbesondere: Beschrankte Menge von Information, die (seriell)in den Arbeitsspeicher ubertragen werden kannNicht ubetragene Information verfallt
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Sperling Experimente
(1) Tachistokopische Darbietung von 12 Buchstaben (3 Zeilena 4)
Bericht, dass 12 Buchstaben gesehen wurdengenannt werden konnten nur 3-4 bevor die Gedachtnisspurverblasste
(2) Zusatzlich Ton, der auf die relevante Zeile verweist (hoch,mittel, tief)
Variation der Zeitspanne zwischen Buchstabendarbietung undHinweisreizBei 0 sec. Verzogerung: alle 4 Buchstaben der Reihe genannt;bei Verzogerung (onset) von 1 sec. verschlechtert sich Recallauf 1-2 Buchstaben
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Arbeitsgedachtnis
Fruher auch “Kurzzeitspeicher”; Arbeits-Gedachtnis betontdie aktive, aufgabenbezogene Funktion
Akustische oder visuelle Organisation
Speicherzeit: 20-30 sec.
Durch Wiederholung (phonological loop) kann Information imArbeitsgedachtnis bleiben
Beschrankte SpeicherkapazitatFlaschenhals des Gedachtnisprozesses (Miller: 7 plus/minus 2chunks)
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Langzeitgedachtnis
Ohne neurologische Erkrankung oder Verletzungen: im Prinzippermanente Speicherung
Virtuell unbeschrankte Gedachtniskapazitat
Semantische/chronologische Organisation
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Semantisches Gedachtnis
Allgemeines (generisches) Wissen (kulturabhangig) uber dieBedeutung von Konzepten, ihre Eigenschaften (Attribute) undBeziehungen
Apfel sind rot, Ein Hund ist ein Saugetier, Vogel legen Eier
Im Gegensatz zu episodischem/fallbasierten Wissen uberkonkrete Erfahrungen (mit kontextueller Information: Zeit,Ort)
Mein Hund Lassie ist 7 Jahre alt, Mein Bruder lebt in London
Ute Schmid Einfuhrung in die Angewandte Informatik
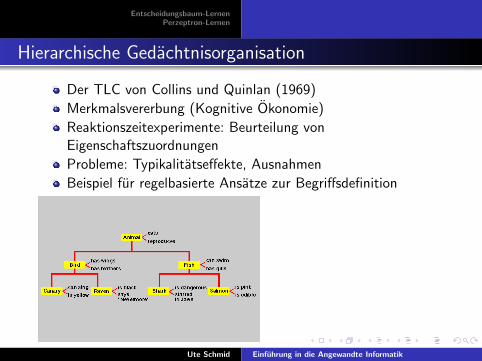
Beispiel fur regelbasierte Ansatze zur Begriffsdefinition
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Intelligente Systeme
Wissensbasierte Systeme
Wissen und Regeln durch Menschen modelliertAllgemeine Mechanismen: Ziehen von Schlussen,Ahnlichkeitsvergleich, ...
Lernende Systeme
Wissen und Regeln werden aus Beispielen erworbenLernalgorithmen
If an expert system – brilliantly designed, engineered andimplemented – cannot learn not to repeat its mistakes, it is not asintelligent as a worm or a sea anemone or a kitten.
(O. Selfridge)
Je flexibler und anpassungsfahiger ein Organismus, desto we-niger verfugt er uber ein fest vorgegebenes Verhaltensinventarund desto mehr muss (lebenslang) gelernt werden!
Ute Schmid Einfuhrung in die Angewandte Informatik
Konzepte: “Hund”, “Primzahl”, “Vorbereitung fur gutenPrufungserfolg”Klassen allgemein: Hunderassen, Zustande einer chemischenAnlageIdentifikation relevanter Merkmalskombinationen zurVorhersage der Zugehorigkeit eines Objekts zu einer Klasse
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Arten des Lernens
Auswendiglernen
Vokabeln, geschichtliche/geographische Fakten
Frage der guten Gedachtnisorganisation fur effizienten Abruf inverschiedenen Kontexten
Lernen von Klassifikationregeln
Konzepte: “Hund”, “Primzahl”, “Vorbereitung fur gutenPrufungserfolg”Klassen allgemein: Hunderassen, Zustande einer chemischenAnlageIdentifikation relevanter Merkmalskombinationen zurVorhersage der Zugehorigkeit eines Objekts zu einer Klasse
Ute Schmid Einfuhrung in die Angewandte Informatik
Konzepte: “Hund”, “Primzahl”, “Vorbereitung fur gutenPrufungserfolg”Klassen allgemein: Hunderassen, Zustande einer chemischenAnlageIdentifikation relevanter Merkmalskombinationen zurVorhersage der Zugehorigkeit eines Objekts zu einer Klasse
Ute Schmid Einfuhrung in die Angewandte Informatik
Konzepte: “Hund”, “Primzahl”, “Vorbereitung fur gutenPrufungserfolg”Klassen allgemein: Hunderassen, Zustande einer chemischenAnlageIdentifikation relevanter Merkmalskombinationen zurVorhersage der Zugehorigkeit eines Objekts zu einer Klasse
Ute Schmid Einfuhrung in die Angewandte Informatik
Klassen allgemein: Hunderassen, Zustande einer chemischenAnlageIdentifikation relevanter Merkmalskombinationen zurVorhersage der Zugehorigkeit eines Objekts zu einer Klasse
Ute Schmid Einfuhrung in die Angewandte Informatik
Konzepte: “Hund”, “Primzahl”, “Vorbereitung fur gutenPrufungserfolg”Klassen allgemein: Hunderassen, Zustande einer chemischenAnlageIdentifikation relevanter Merkmalskombinationen zurVorhersage der Zugehorigkeit eines Objekts zu einer Klasse
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Arten des Lernens cont.
Auswendiglernen
Lernen von Klassifikationregeln
Lernen von Steuerregeln/Policies/Programmen
Motorische Steuerung (Stab balancieren, Ruckwarts einparken)Prozess-Steuerung (Klaranlage)Handlungsstrategien (Umformen von Gleichungen, Abfolge vonBeweisschritten, Handlungsfolge zur Installation einesRechners)Identifikation von Aktionsfolgen zur Erreichung eines Ziels
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Arten des Lernens cont.
Auswendiglernen
Lernen von Klassifikationregeln
Lernen von Steuerregeln/Policies/Programmen
Motorische Steuerung (Stab balancieren, Ruckwarts einparken)Prozess-Steuerung (Klaranlage)Handlungsstrategien (Umformen von Gleichungen, Abfolge vonBeweisschritten, Handlungsfolge zur Installation einesRechners)Identifikation von Aktionsfolgen zur Erreichung eines Ziels
Ute Schmid Einfuhrung in die Angewandte Informatik
Prozess-Steuerung (Klaranlage)Handlungsstrategien (Umformen von Gleichungen, Abfolge vonBeweisschritten, Handlungsfolge zur Installation einesRechners)Identifikation von Aktionsfolgen zur Erreichung eines Ziels
Ute Schmid Einfuhrung in die Angewandte Informatik
Handlungsstrategien (Umformen von Gleichungen, Abfolge vonBeweisschritten, Handlungsfolge zur Installation einesRechners)Identifikation von Aktionsfolgen zur Erreichung eines Ziels
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Arten des Lernens cont.
Auswendiglernen
Lernen von Klassifikationregeln
Lernen von Steuerregeln/Policies/Programmen
Motorische Steuerung (Stab balancieren, Ruckwarts einparken)Prozess-Steuerung (Klaranlage)Handlungsstrategien (Umformen von Gleichungen, Abfolge vonBeweisschritten, Handlungsfolge zur Installation einesRechners)
Identifikation von Aktionsfolgen zur Erreichung eines Ziels
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Arten des Lernens cont.
Auswendiglernen
Lernen von Klassifikationregeln
Lernen von Steuerregeln/Policies/Programmen
Motorische Steuerung (Stab balancieren, Ruckwarts einparken)Prozess-Steuerung (Klaranlage)Handlungsstrategien (Umformen von Gleichungen, Abfolge vonBeweisschritten, Handlungsfolge zur Installation einesRechners)Identifikation von Aktionsfolgen zur Erreichung eines Ziels
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Klassifikationslernen
Beispiel: Lernen eines Konzepts
Objekte der Welt sind (kulturspezifisch) in Konzepte gruppiert
Extensionale Beschreibung: (unendliche)Menge aller Exemplare �
����
�����
�����
�����
� � � � �� � � � �� � � � �� � � � �
Intensionale Beschreibung: endliche CharakterisierungKonzept Tisch ist die Menge aller Objekte, fur die gilt, dasssie 3 oder 4 Beine und eine Platte haben
Lernen: Konstruktion einer intensionalen Beschreibung aus ei-ner endlichen Teilmenge von Exemplaren (Trainingsbeispiele)
Lernen als Induktion
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Klassifikationslernen
Beispiel: Lernen eines Konzepts
Objekte der Welt sind (kulturspezifisch) in Konzepte gruppiert
Extensionale Beschreibung: (unendliche)Menge aller Exemplare �
����
�����
�����
�����
� � � � �� � � � �� � � � �� � � � �
Intensionale Beschreibung: endliche CharakterisierungKonzept Tisch ist die Menge aller Objekte, fur die gilt, dasssie 3 oder 4 Beine und eine Platte haben
Lernen: Konstruktion einer intensionalen Beschreibung aus ei-ner endlichen Teilmenge von Exemplaren (Trainingsbeispiele)
Lernen als Induktion
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Klassifikationslernen
Beispiel: Lernen eines Konzepts
Objekte der Welt sind (kulturspezifisch) in Konzepte gruppiert
Extensionale Beschreibung: (unendliche)Menge aller Exemplare �
����
�����
�����
�����
� � � � �� � � � �� � � � �� � � � �
Intensionale Beschreibung: endliche CharakterisierungKonzept Tisch ist die Menge aller Objekte, fur die gilt, dasssie 3 oder 4 Beine und eine Platte haben
Lernen: Konstruktion einer intensionalen Beschreibung aus ei-ner endlichen Teilmenge von Exemplaren (Trainingsbeispiele)
Lernen als Induktion
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Klassifikationslernen
Beispiel: Lernen eines Konzepts
Objekte der Welt sind (kulturspezifisch) in Konzepte gruppiert
Extensionale Beschreibung: (unendliche)Menge aller Exemplare �
����
�����
�����
�����
� � � � �� � � � �� � � � �� � � � �
Intensionale Beschreibung: endliche CharakterisierungKonzept Tisch ist die Menge aller Objekte, fur die gilt, dasssie 3 oder 4 Beine und eine Platte haben
Lernen: Konstruktion einer intensionalen Beschreibung aus ei-ner endlichen Teilmenge von Exemplaren (Trainingsbeispiele)
Lernen als Induktion
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Klassifikationslernen
Beispiel: Lernen eines Konzepts
Objekte der Welt sind (kulturspezifisch) in Konzepte gruppiert
Extensionale Beschreibung: (unendliche)Menge aller Exemplare �
����
�����
�����
�����
� � � � �� � � � �� � � � �� � � � �
Intensionale Beschreibung: endliche CharakterisierungKonzept Tisch ist die Menge aller Objekte, fur die gilt, dasssie 3 oder 4 Beine und eine Platte haben
Lernen: Konstruktion einer intensionalen Beschreibung aus ei-ner endlichen Teilmenge von Exemplaren (Trainingsbeispiele)
Lernen als Induktion
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Klassifikationslernen
Beispiel: Lernen eines Konzepts
Objekte der Welt sind (kulturspezifisch) in Konzepte gruppiert
Extensionale Beschreibung: (unendliche)Menge aller Exemplare �
����
�����
�����
�����
� � � � �� � � � �� � � � �� � � � �
Intensionale Beschreibung: endliche CharakterisierungKonzept Tisch ist die Menge aller Objekte, fur die gilt, dasssie 3 oder 4 Beine und eine Platte haben
Lernen: Konstruktion einer intensionalen Beschreibung aus ei-ner endlichen Teilmenge von Exemplaren (Trainingsbeispiele)
Lernen als Induktion
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Induktion versus Deduktion
Deduktion
Axiom Alle Menschen sind sterblich.
Fakt Sokrates ist ein Mensch.
Schluss Sokrates ist sterblich!
“Wissensextraktion”
Anwendung einer korrekten Schlussregelhier: modus ponensresultiert in einer korrekten Folgerung
Deduktion: Schließen von Allgemeinem auf Spezielles
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
Induktion versus Deduktion
Induktion
Hintergrundwissen Sokrates ist ein Mensch.
Beobachtung Sokrates ist sterblich.
Generalisierung Alle Menschen sind sterblich!
“Wissensgenerierung”
Aus Beobachtungen/Trainingsbeispielenwird eine allgemeinere Regel erzeugt,die hypothetischen Charakter hat
Induktion: Schließen vom Speziellen auf Allgemeines
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
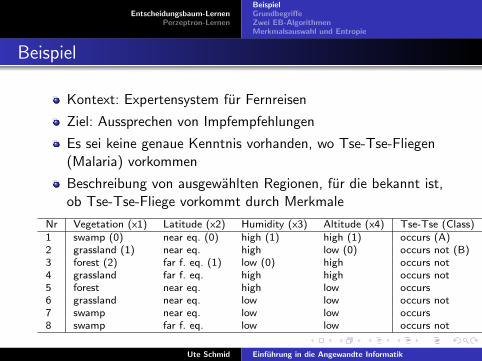
Beispiel
Kontext: Expertensystem fur Fernreisen
Ziel: Aussprechen von Impfempfehlungen
Es sei keine genaue Kenntnis vorhanden, wo Tse-Tse-Fliegen(Malaria) vorkommen
Beschreibung von ausgewahlten Regionen, fur die bekannt ist,ob Tse-Tse-Fliege vorkommt durch Merkmale
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
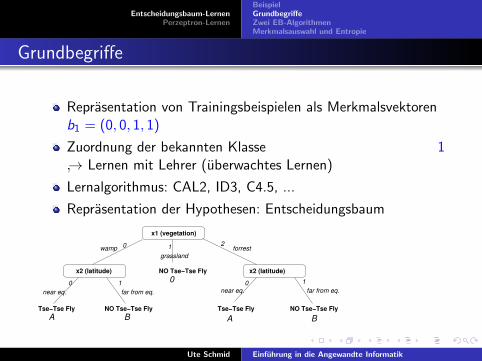
Grundbegriffe
Reprasentation von Trainingsbeispielen als Merkmalsvektorenb1 = (0, 0, 1, 1)
Zuordnung der bekannten Klasse 1↪→ Lernen mit Lehrer (uberwachtes Lernen)
Lernalgorithmus: CAL2, ID3, C4.5, ...
Reprasentation der Hypothesen: Entscheidungsbaum
x1 (vegetation)
NO Tse−Tse Fly
0 1 2
NO Tse−Tse FlyNO Tse−Tse Fly Tse−Tse FlyTse−Tse Fly
0 1far from eq.near eq.
0 10x2 (latitude) x2 (latitude)
A B A B
forrestgrassland
wamp
near eq. far from eq.
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
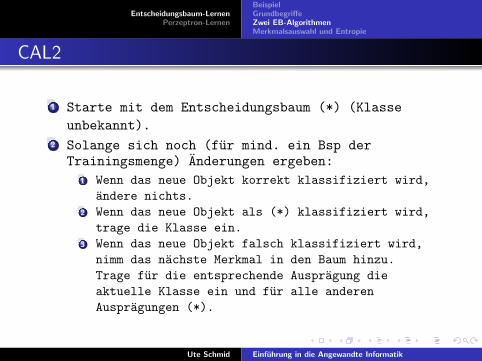
CAL2
1 Starte mit dem Entscheidungsbaum (*) (Klasse
unbekannt).
2 Solange sich noch (fur mind. ein Bsp derTrainingsmenge) Anderungen ergeben:
1 Wenn das neue Objekt korrekt klassifiziert wird,
andere nichts.
2 Wenn das neue Objekt als (*) klassifiziert wird,
trage die Klasse ein.
3 Wenn das neue Objekt falsch klassifiziert wird,
nimm das nachste Merkmal in den Baum hinzu.
Trage fur die entsprechende Auspragung die
aktuelle Klasse ein und fur alle anderen
Auspragungen (*).
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
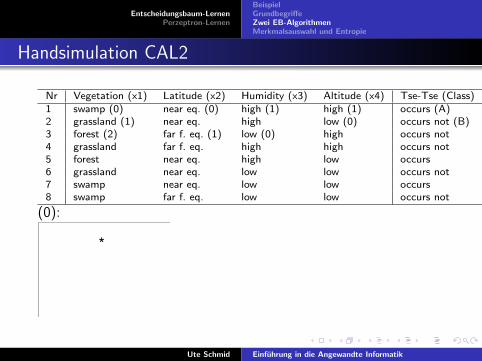
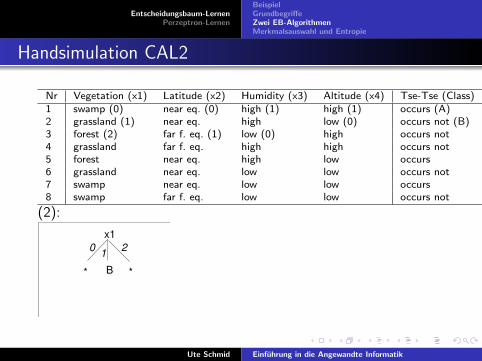
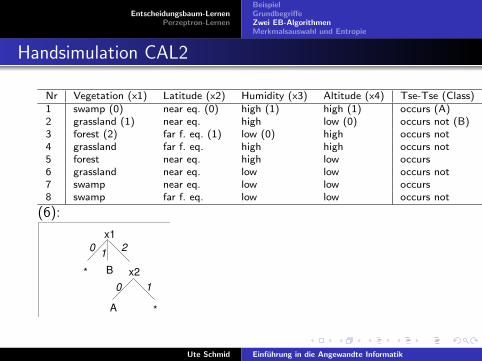
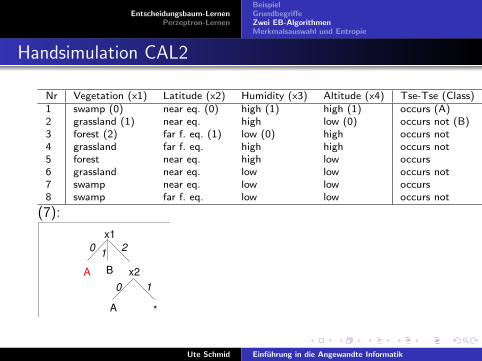
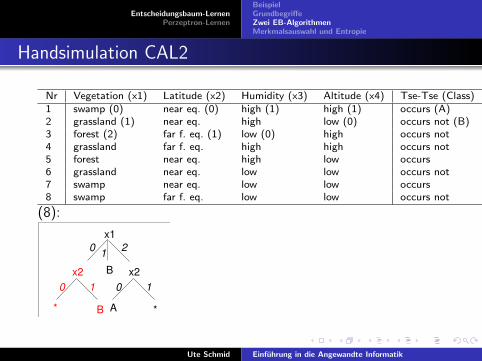
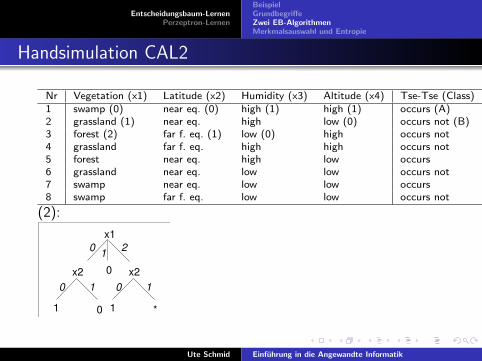
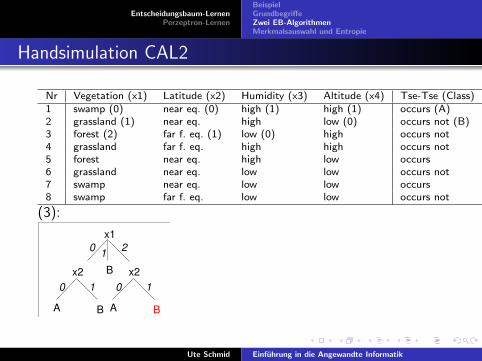
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(0):
*
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
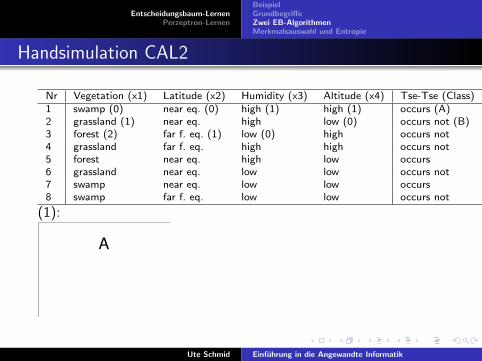
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(1):
A
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(2):
x1
* *
0 21
B
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
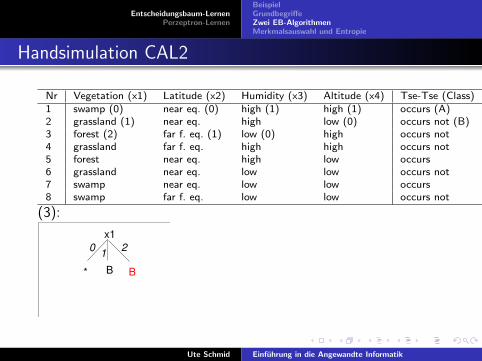
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(3):
x1
*
0 21
B B
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
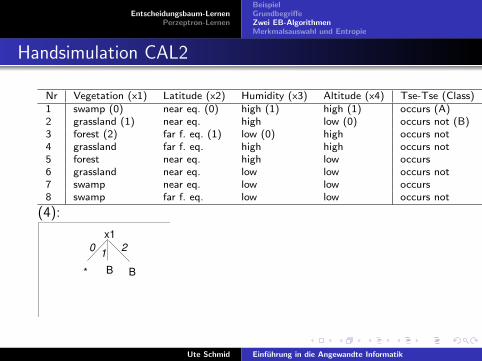
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(4):
x1
*
0 21
B B
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
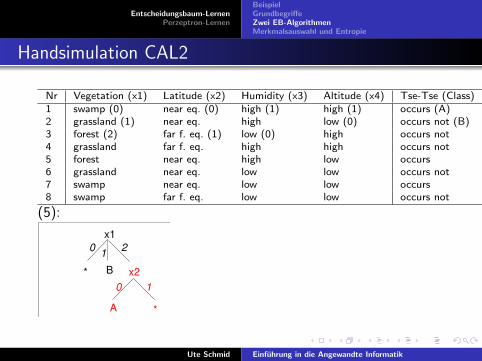
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(5):
x1
*
0 21
x2
*
0 1
B
A
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(6):
x1
*
0 21
x2
*
0 1
B
A
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(7):
x1
0 21
x2
*
0 1
A B
A
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(8):
x1
0 21
x2
*
0 1
*
x2
0 1
B
B A
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
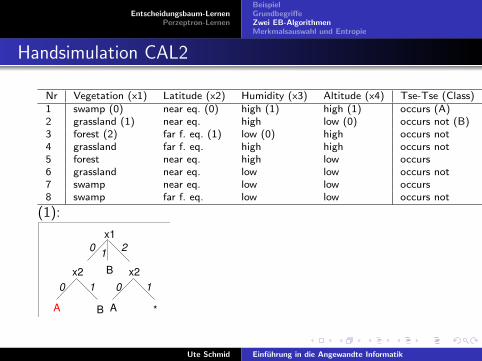
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(1):
x1
0 21
x2
*
0 1
x2
0 1
B
A B A
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(2):
x1
0
0 21
x2
*
0 1
1 0
x20 1
1
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Handsimulation CAL2
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
(3):
x1
0 21
x2
0 1
x2
0 1
B
A B A B
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Kommentare zu CAL2
Inkrementelles Lernverfahren
Termination: in einem Durchlauf durch alle Beispiele keineAnderungen mehr (fur disjunkte Klassen)
Entscheidungsbaum: Menge von Wenn-Dann RegelnWENN (x1 = 0 UND x2 = 0) ODER (x1 = 2 UND x2 = 0)DANN A SONST B
Funktioniert auch fur allgemeines Klassifikationslernen (mehrals 2 Klassen)
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
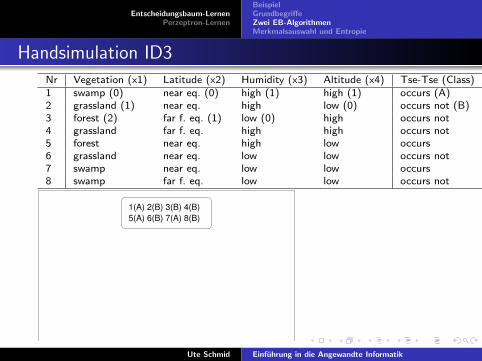
Handsimulation ID3
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
1(A) 2(B) 3(B) 4(B)
5(A) 6(B) 7(A) 8(B)
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
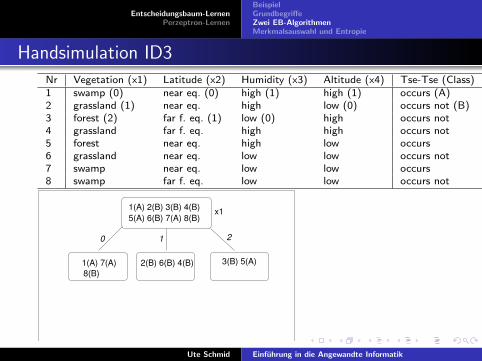
Handsimulation ID3
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
x1
10 2
1(A) 2(B) 3(B) 4(B)
5(A) 6(B) 7(A) 8(B)
1(A) 7(A)
8(B)
2(B) 6(B) 4(B) 3(B) 5(A)
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
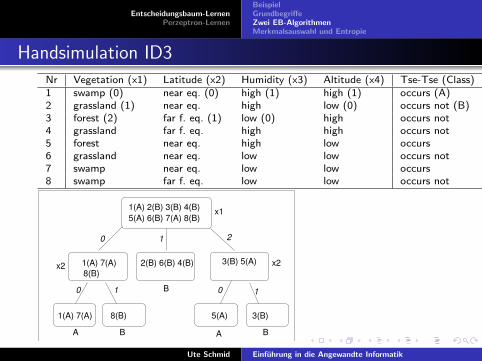
Handsimulation ID3
Nr Vegetation (x1) Latitude (x2) Humidity (x3) Altitude (x4) Tse-Tse (Class)1 swamp (0) near eq. (0) high (1) high (1) occurs (A)2 grassland (1) near eq. high low (0) occurs not (B)3 forest (2) far f. eq. (1) low (0) high occurs not4 grassland far f. eq. high high occurs not5 forest near eq. high low occurs6 grassland near eq. low low occurs not7 swamp near eq. low low occurs8 swamp far f. eq. low low occurs not
x1
10 2
x2 x2
0 1 10
1(A) 2(B) 3(B) 4(B)
5(A) 6(B) 7(A) 8(B)
1(A) 7(A)
8(B)
2(B) 6(B) 4(B) 3(B) 5(A)
B
1(A) 7(A) 8(B)
A B
5(A)
A
3(B)
B
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Kommentare zu ID3
Nicht-Inkrementelles (“Batch”) Lernverfahren
Alle Beispiele werden gemeinsam betrachtet und systematischbezuglich der (relevanten) Merkmale unterteilt.
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Kommentare zu EB-Verfahren
Liefern symbolische (verbale) Regeln
Generalisierung: Nur Kombination relevanter Merkmalenicht: Tabelle der Trainingsbeispiele
EB: Klassifikation noch nie gesehener Objekte
Allgemein bei Lernverfahren: ermittelt werden Trainingsfehlerund Generalisierungsfehler (sollte moglichst gering sein)
Evaluation: Zuruckbehalten einer Teilmenge der Beispiele zumTesten
Lernen basiert auf zwei “inductive biases”
Language Bias: Ich kann nur Lernen, was ich in derHypothesensprache reprasentieren kannSearch Bias: Wie bewege ich mich im Hypothesenraum fort(hier von kleinen zu großeren EBs)
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Verkurzung von EBs
Merkmalsreihenfolge bestimmt Komplexitat des gelerntenBaums
Irrelevante Merkmale in hoheren Ebenen bleiben erhalten
Inkrementelles Lernen: Analyse des gelernten Baumes,Umstrukturierung und Loschen irrelevanter Merkmale(Beschneidung im Nachhinein)
Batch-Lernen: Merkmalsauswahl nachinformationstheoretischem Mass
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
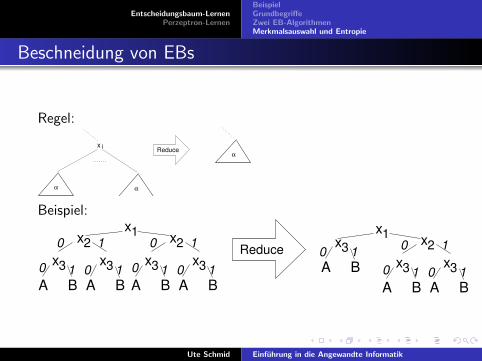
Beschneidung von EBs
Regel:
αα
αx i Reduce
Beispiel:
x1
Reduce
x1x
x x
0
0 3
2
31 0
1
1
x
x x
0
0 3
2
31 0
1
1
A B A B A B A B
x30 1x
x x
0
0 3
2
31 0
1
1A B
A B A B
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
Umstrukturierung von EBs
Regel:
α11 α1k α αl1 lk
xjxj
xi
α11
switch
α α αlk
xj
xi xi
l1 1k
Beispiel:
xj
x i ix
a11 21a a12 a22
j j
a a21
xi
x x
11a 12 a22
switch
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie
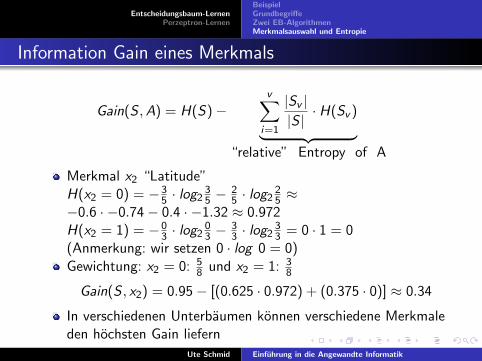
Information Gain
Informationstheoretisches Maß zur Auswahl des nachstenMerkmals
Welches Merkmal reduziert die Unsicherheit, um welcheKlasse es sich handeln konnte am meisten
Idee: Entropie des Gesamtsystems minus relative Entropieeines Merkmals
Merkmal mit hochstem Wert (mit geringster Entropie)auswahlen
Ute Schmid Einfuhrung in die Angewandte Informatik
Entscheidungsbaum-LernenPerzeptron-Lernen
BeispielGrundbegriffeZwei EB-AlgorithmenMerkmalsauswahl und Entropie