Differentialgeometrie 3.1 Jürgen Roth
Inhaltsverzeichnis
Differentialgeometrie
1 Euklidische Geometrie
2 Kurventheorie
3 Klassische Flächentheorie
4 Innere Geometrie von Flächen
5 Geometrie und Topologie
Differentialgeometrie 3.2 Jürgen Roth
Kapitel 3:
Klassische Flächentheorie
Differentialgeometrie
http://www.juergen-roth.de ► Lehre ► Differentialgeometrie
Differentialgeometrie 3.3 Jürgen Roth
Inhaltsverzeichnis
Kapitel 3: Klassische Flächentheorie
3.0 Partielle Ableitungen und Differenzierbarkeit
3.1 Reguläre Flächen
3.2 Die Tangentialebene
3.3 Die erste Fundamentalform
3.4 Normalenfelder und Orientierbarkeit
3.5 Die zweite Fundamentalform
3.6 Krümmung
3.7 Flächeninhalt und Integration auf Flächen
3.8 Einige Klassen von Flächen
3.8.1 Regelflächen
3.8.2 Minimalflächen
3.8.3 Drehflächen
3.8.4 Röhrenflächen
Differentialgeometrie 3.4 Jürgen Roth
3.0 Partielle Ableitungen
und Differenzierbarkeit
Kapitel 3: Klassische Flächentheorie
Differentialgeometrie 3.5 Jürgen Roth
Richtungsableitung
Bemerkung 3.0.1
Teilaspekte der Differenzierbarkeit von Funktionen 𝑓:ℝ𝑛 → ℝ
lassen sich mit den Mitteln analysieren, die aus der Analysis einer
Variablen zur Verfügung stehen.
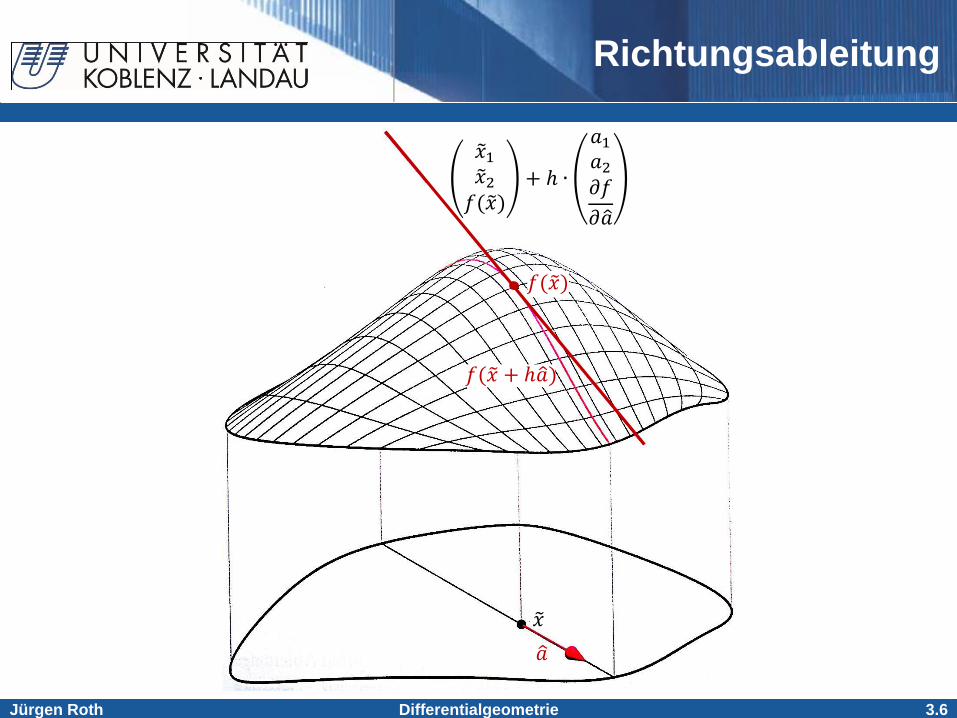
Man wählt dazu eine Richtung 𝑎 und definiert eine Funktion 𝑔(): 𝑔:ℝ → ℝ, ↦ 𝑔 = 𝑓(𝑥 1 + ∙ 𝑎1, … , 𝑥 𝑛 + ∙ 𝑎𝑛)
Die Funktion 𝑔() kann, wenn sie differenzierbar ist, nach dem
Argument abgeleitet werden.
Diese Richtungsableitung kann als Grenzwert geschrieben
werden: 𝜕𝑓
𝜕𝑎 ≔ lim
→0
𝑓 𝑥 1 + ∙ 𝑎1, … , 𝑥 𝑛 + ∙ 𝑎𝑛 − 𝑓(𝑥 1, … , 𝑥 𝑛)
Diese Größe lässt sich einfach graphisch deuten: Die Funktion 𝑓
bildet die Gerade 𝑥 + ℝ ∙ 𝑎 auf eine Kurve auf der Hyperfläche ab.
Diese Kurve ist der Graph einer Funktion ℝ → ℝ, an die man wie
gewohnt eine Tangente legen kann.
Differentialgeometrie 3.6 Jürgen Roth
Richtungsableitung
𝑥 1𝑥 2
𝑓(𝑥 )+ ∙
𝑎1
𝑎2
𝜕𝑓
𝜕𝑎
𝑓(𝑥 )
𝑓(𝑥 + 𝑎 )
𝑥
𝑎
Differentialgeometrie 3.7 Jürgen Roth
Partielle Ableitung
Bemerkung 3.0.2
Besonders praktisch sind die Ableitungen in Richtung der
Koordinatenachsen, die deshalb einen eigenen Namen haben.
Definition 3.0.3
Die partielle Ableitung einer Funktion 𝑓:ℝ𝑛 → ℝ nach einer
Variablen 𝑥𝑘 im Punkt 𝑥 = 𝑥 1, … , 𝑥 𝑛𝑇 ist:
𝑓𝑥𝑘𝑥 ≡
𝜕𝑓
𝜕𝑥𝑘 𝑥
≔𝜕𝑓
𝜕𝑒𝑘 𝑥
= lim→0
𝑓 𝑥 + ∙ 𝑒𝑘 − 𝑓(𝑥 )
Bemerkung 3.0.4: Berechnung der partiellen Ableitung
Die partielle Ableitung 𝑓𝑥𝑘≡
𝜕𝑓
𝜕𝑥𝑘 der Funktion 𝑓:ℝ𝑛 → ℝ nach der
Variablen 𝑥𝑘 berechnet man, indem man alle anderen Variablen
konstant hält und 𝑓 nach 𝑥𝑘 „normal“, also als Funktion ℝ → ℝ
ableitet.
Differentialgeometrie 3.8 Jürgen Roth
Partielle Ableitung
Beispiel 3.0.5
:ℝ3 → ℝ, 𝑥, 𝑦, 𝑧 𝑇 ↦ 𝑥, 𝑦, 𝑧 𝑇 = sin3(𝑥𝑦𝑧)
𝜕
𝜕𝑥= 3𝑦𝑧 ∙ sin2 𝑥𝑦𝑧 ∙ cos(𝑥𝑦𝑧)
𝜕
𝜕𝑦= 3𝑥𝑧 ∙ sin2 𝑥𝑦𝑧 ∙ cos(𝑥𝑦𝑧)
𝜕
𝜕𝑧= 3𝑥𝑦 ∙ sin2 𝑥𝑦𝑧 ∙ cos(𝑥𝑦𝑧)
Beispiel 3.0.7
𝑓:ℝ3 → ℝ, 𝑥, 𝑦, 𝑧 𝑇 ↦ 𝑓 𝑥, 𝑦, 𝑧 𝑇 = 𝑥2 + 𝑒𝑦𝑧
𝑓𝑥 =𝜕𝑓
𝜕𝑥= 2𝑥
𝑓𝑦 =𝜕𝑓
𝜕𝑦= 𝑧 ∙ 𝑒𝑦𝑧
𝑓𝑧 =𝜕𝑓
𝜕𝑧= 𝑦 ∙ 𝑒𝑦𝑧
Bemerkung 3.0.6
Natürlich kann man auch
partielle Ableitungen höherer
Ordnung bilden.
Eine partielle Ableitung zweiter
Ordnung ist etwa:
𝑓𝑥𝑦 ≔𝜕
𝜕𝑦
𝜕𝑓
𝜕𝑥=
𝜕2𝑓
𝜕𝑥𝜕𝑦
𝑓𝑥𝑥 =𝜕2𝑓
𝜕𝑥2 = 2
𝑓𝑦𝑥 =𝜕2𝑓
𝜕𝑦𝜕𝑥= 0
𝑓𝑧𝑥 =𝜕2𝑓
𝜕𝑧𝜕𝑥= 0
𝑓𝑥𝑦 =𝜕2𝑓
𝜕𝑥𝜕𝑦= 0
𝑓𝑦𝑦 =𝜕2𝑓
𝜕𝑦2 = 𝑧2 ∙ 𝑒𝑦𝑧 𝑓𝑦𝑧 =𝜕2𝑓
𝜕𝑦𝜕𝑧
= 𝑒𝑦𝑧 + 𝑦𝑧 ∙ 𝑒𝑦𝑧
𝑓𝑥𝑧 =𝜕2𝑓
𝜕𝑥𝜕𝑧= 0
𝑓𝑧𝑦 =𝜕2𝑓
𝜕𝑧𝜕𝑦
= 𝑒𝑦𝑧 + 𝑦𝑧 ∙ 𝑒𝑦𝑧 𝑓𝑧𝑧 =𝜕2𝑓
𝜕𝑧2 = 𝑦2 ∙ 𝑒𝑦𝑧
Differentialgeometrie 3.9 Jürgen Roth
Satz von Schwarz
Satz 3.0.8: Satz von Schwarz
Ist eine Funktion 𝑓:ℝ𝑛 → ℝ in einer Umgebung 𝑈 von 𝑥 mindestens 𝑝-mal
partiell differenzierbar und sind alle 𝑝-ten partiellen Ableitungen in 𝑈 stetig,
dann ist in 𝑥 die Differentationsreihenfolge in allen 𝑞-ten partiellen
Ableitungen mit 𝑞 ≤ 𝑝 unerheblich.
Bemerkung 3.0.9: Kurz: 𝑓 ∈ 𝐶𝑝(𝑈) ⇒
Definition 3.0.10
Eine Funktion 𝑓:ℝ𝑛 → ℝ ist dann im Punkt 𝑥 = 𝑥 1, … , 𝑥 𝑛𝑇
differenzierbar, wenn es einen Vektor 𝑎 gibt, sodass man sie in der Form 𝑓 𝑥 = 𝑓 𝑥1, … , 𝑥𝑛
𝑇 = 𝑓 𝑥 + 𝑎 ∙ 𝑥 − 𝑥 + 𝑅(𝑥)
schreiben kann und der Fehler 𝑅(𝑥) von
höherer als erster Ordnung verschwindet:
Die Funktion 𝑓 heißt differenzierbar in 𝐵 ⊆ ℝ𝑛, wenn sie in jedem Punkt
𝑝 ∈ 𝐵 differenzierbar ist.
Alle partiellen Ableitungen bis zur
p−ten Ordnung sind vertauschbar.
lim𝑥→𝑥
𝑅(𝑥)
𝑥−𝑥 = 0
Differentialgeometrie 3.10 Jürgen Roth
Gradient
Definition 3.0.11
Der Gradient einer im Punkt 𝑝
partiell differenzierbaren Funktion
𝑓:ℝ𝑛 → ℝ ist der Vektor der
partiellen Ableitungen in diesem
Punkt:
Bemerkung 3.0.12
Oft kann man den Gradienten allgemein, also ohne Bezug auf
einen bestimmten Punkt berechnen. Dann lässt man die
Kennzeichnung 𝑝 weg und schreibt einfach grad 𝑓.
Das zu grad alternative Zeichen 𝛻 wird „Nabla“ gesprochen.
Mit dem Gradient lässt sich die lineare Approximation
differenzierbarer Funktionen 𝑓 schreiben als:
𝑓 𝑥 = 𝑓 𝑝 + grad 𝑓 𝑝
∙ 𝑥 − 𝑝 + 𝑅(𝑥)
𝛻𝑓 𝑝
≡ grad 𝑓 𝑝
≔
𝜕𝑓
𝜕𝑥1 𝑝
⋮𝜕𝑓
𝜕𝑥𝑛 𝑝
Differentialgeometrie 3.11 Jürgen Roth
Gradient
Beispiel 3.0.13
𝑓:ℝ3 → ℝ, 𝑥, 𝑦, 𝑧 𝑇 ↦ 𝑓 𝑥, 𝑦, 𝑧 𝑇 = 𝑥2 ∙ 𝑒𝑦∙sin(𝑧)
𝑓𝑥 𝑥, 𝑦, 𝑧 𝑇 = 2𝑥 ∙ 𝑒𝑦∙sin(𝑧)
𝑓𝑦 𝑥, 𝑦, 𝑧 𝑇 = 𝑥2 ∙ sin(𝑧) ∙ 𝑒𝑦∙sin(𝑧)
𝑓𝑧 𝑥, 𝑦, 𝑧 𝑇 = 𝑥2𝑦 ∙ cos(𝑧) ∙ 𝑒𝑦∙sin(𝑧)
grad 𝑓 =
𝜕𝑓
𝜕𝑥𝜕𝑓
𝜕𝑦
𝜕𝑓
𝜕𝑧
=
2𝑥 ∙ 𝑒𝑦∙sin(𝑧)
𝑥2 ∙ sin(𝑧) ∙ 𝑒𝑦∙sin(𝑧)
𝑥2𝑦 ∙ cos(𝑧) ∙ 𝑒𝑦∙sin(𝑧)
Bemerkung 3.0.14: Eigenschaften des Gradienten
Für eine differenzierbare Funktion 𝑓:ℝ𝑛 → ℝ gilt für die
Richtungsableitung in eine beliebige Richtung 𝑎 :
𝜕𝑓
𝜕𝑎 𝑝
= 𝑎 ∙ grad 𝑓 𝑝 (*)
Differentialgeometrie 3.12 Jürgen Roth
Gradient
Bemerkung 3.0.14: Eigenschaften des Gradienten (Fortsetzung 1)
Aus (*) folgt mit der Cachy-Schwarz‘schen Ungleichung:
𝜕𝑓
𝜕𝑎 𝑝
≤ 𝑎 ∙ grad 𝑓 𝑝 = grad 𝑓 𝑝
da 𝑎 ein Einheitsvektor ist.
Der Betrag der Änderung von 𝑓 kann also nie größer sein als
die Norm des Gradienten.
Anders formuliert gilt also: Die Norm des Gradienten gibt das
Ausmaß der maximalen Änderung von 𝑓 im Punkt 𝑝 an.
Für eine differenzierbare Funktion 𝑓:ℝ𝑛 → ℝ mit grad 𝑓 ≠ 0 gibt
der Vektor 𝑒 ≔grad 𝑓
grad 𝑓 die Richtung des steilsten Anstiegs von 𝑓
an.
Entsprechend gibt −𝑒 die Richtung des steilsten Abfalls an.
Die Richtungsableitung wird also maximal, wenn man in
Richtung des Gradienten ableitet.
Differentialgeometrie 3.13 Jürgen Roth
Gradient
Bemerkung 3.0.14: Eigenschaften des Gradienten (Fortsetzung 2)
Der Gradient erfüllt als linearer Differenzialoperator die Produkt
und Kettenregel. Für Funktionen 𝑓, 𝑔:ℝ𝑛 → ℝ und Zahlen 𝛼, 𝛽 ∈ ℝ
gilt:
grad 𝛼 ∙ 𝑓 + 𝛽 ∙ 𝑔 = 𝛼 ∙ grad 𝑓 + 𝛽 ∙ grad 𝑔
grad 𝑓 ∙ 𝑔 = 𝑔 ∙ grad 𝑓 + 𝑓 ∙ grad 𝑔
Für 𝑔 ≠ 0 gilt weiter:
grad 𝑓
𝑔=
1
𝑔2∙ 𝑔 ∙ grad 𝑓 − 𝑓 ∙ grad 𝑔
Für jede (affin) lineare Funktion gilt
𝑓 𝑥 = 𝑓 𝑝 + grad 𝑓 𝑝
∙ 𝑥 − 𝑝
d. h. 𝑅 𝑥 ≡ 0.
Differentialgeometrie 3.14 Jürgen Roth
Jakobi-Matrix
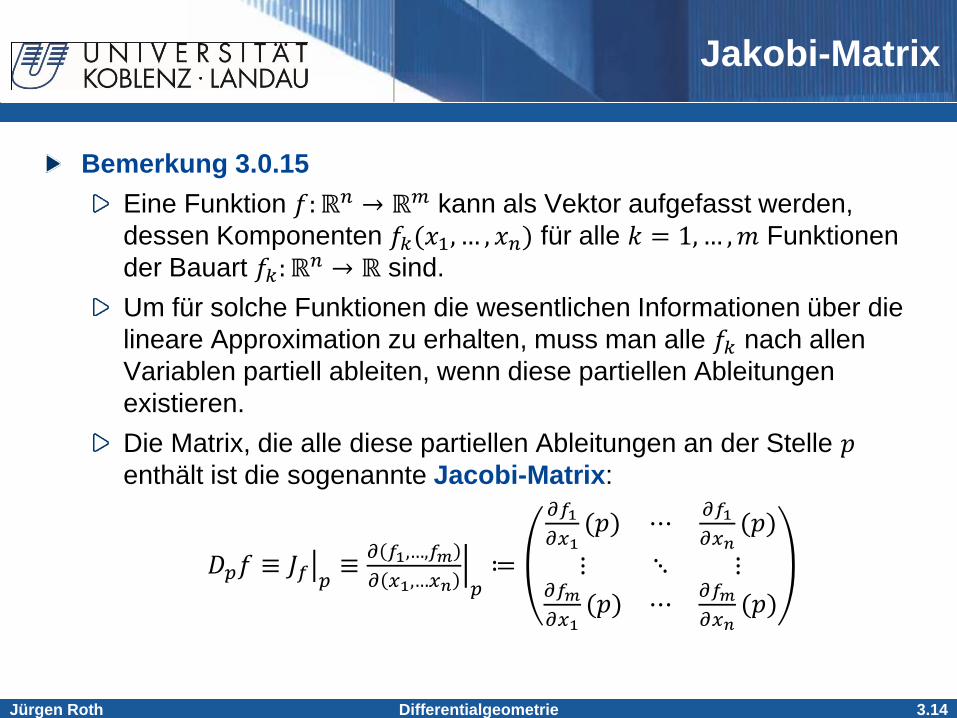
Bemerkung 3.0.15
Eine Funktion 𝑓:ℝ𝑛 → ℝ𝑚 kann als Vektor aufgefasst werden,
dessen Komponenten 𝑓𝑘(𝑥1, … , 𝑥𝑛) für alle 𝑘 = 1,… ,𝑚 Funktionen
der Bauart 𝑓𝑘: ℝ𝑛 → ℝ sind.
Um für solche Funktionen die wesentlichen Informationen über die
lineare Approximation zu erhalten, muss man alle 𝑓𝑘 nach allen
Variablen partiell ableiten, wenn diese partiellen Ableitungen
existieren.
Die Matrix, die alle diese partiellen Ableitungen an der Stelle 𝑝
enthält ist die sogenannte Jacobi-Matrix:
𝐷𝑝𝑓 ≡ 𝐽𝑓 𝑝
≡𝜕 𝑓1,…,𝑓𝑚
𝜕 𝑥1,…𝑥𝑛 𝑝
≔
𝜕𝑓1
𝜕𝑥1(𝑝) ⋯
𝜕𝑓1
𝜕𝑥𝑛(𝑝)
⋮ ⋱ ⋮𝜕𝑓𝑚
𝜕𝑥1(𝑝) ⋯
𝜕𝑓𝑚
𝜕𝑥𝑛(𝑝)
Differentialgeometrie 3.15 Jürgen Roth
Jacobi-Matrix
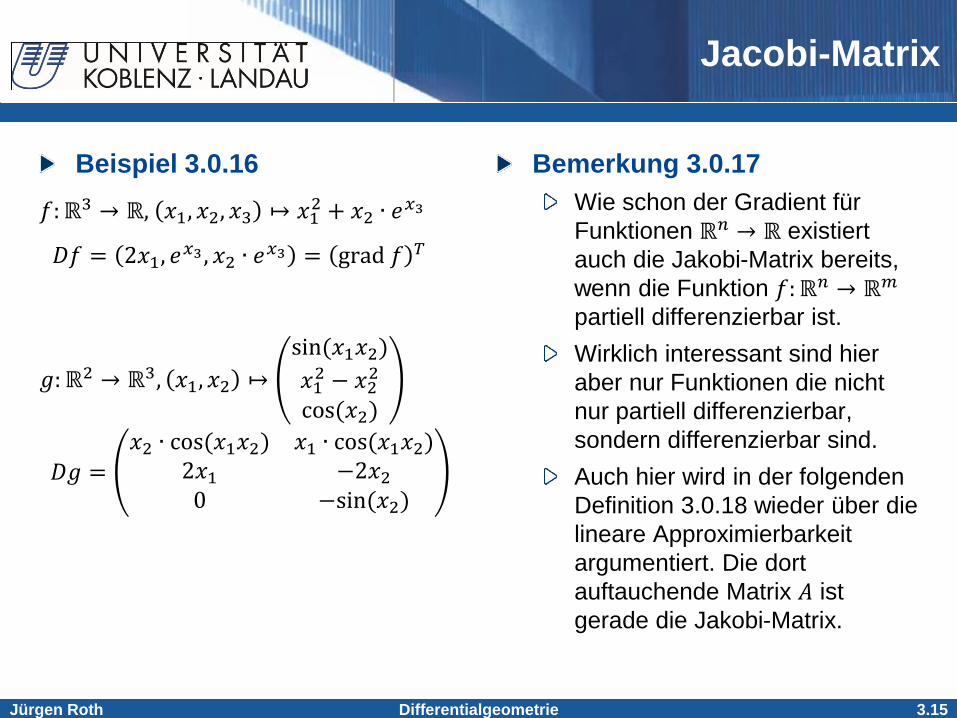
Beispiel 3.0.16
𝑓:ℝ3 → ℝ, 𝑥1, 𝑥2, 𝑥3 ↦ 𝑥12 + 𝑥2 ∙ 𝑒𝑥3
𝐷𝑓 = 2𝑥1, 𝑒𝑥3 , 𝑥2 ∙ 𝑒𝑥3 = grad 𝑓 𝑇
𝑔:ℝ2 → ℝ3, 𝑥1, 𝑥2 ↦
sin (𝑥1𝑥2)
𝑥12 − 𝑥2
2
cos (𝑥2)
𝐷𝑔 =
𝑥2 ∙ cos (𝑥1𝑥2) 𝑥1 ∙ cos (𝑥1𝑥2)2𝑥1 −2𝑥2
0 −sin (𝑥2)
Bemerkung 3.0.17
Wie schon der Gradient für
Funktionen ℝ𝑛 → ℝ existiert
auch die Jakobi-Matrix bereits,
wenn die Funktion 𝑓:ℝ𝑛 → ℝ𝑚
partiell differenzierbar ist.
Wirklich interessant sind hier
aber nur Funktionen die nicht
nur partiell differenzierbar,
sondern differenzierbar sind.
Auch hier wird in der folgenden
Definition 3.0.18 wieder über die
lineare Approximierbarkeit
argumentiert. Die dort
auftauchende Matrix 𝐴 ist
gerade die Jakobi-Matrix.
Differentialgeometrie 3.16 Jürgen Roth
Differenzierbarkeit von
Funktionen 𝒇:ℝ𝒏 → ℝ𝒎
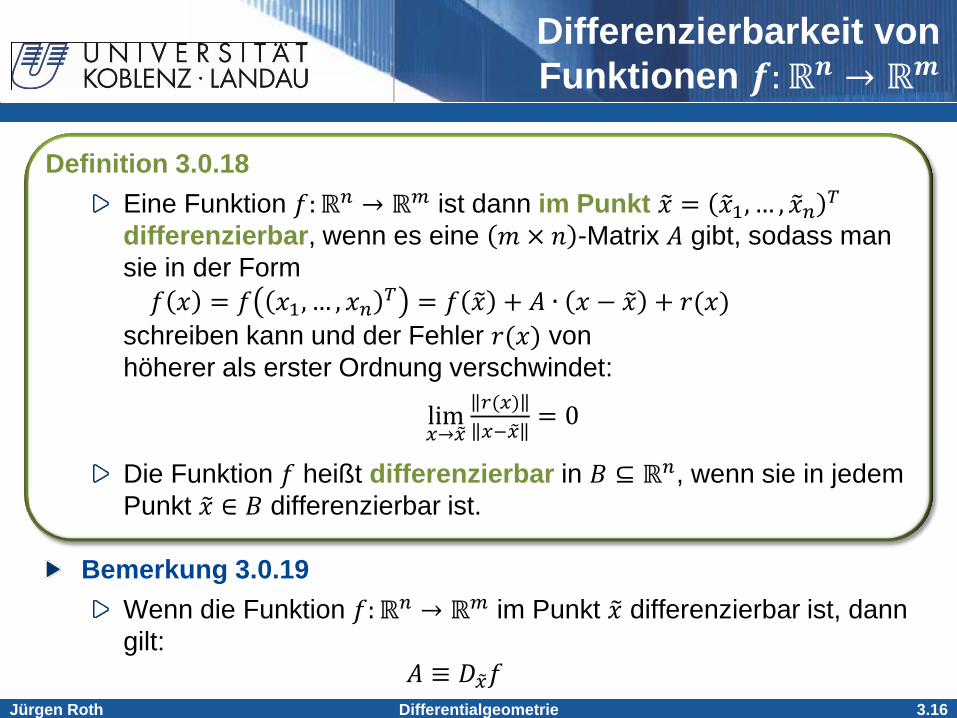
Definition 3.0.18
Eine Funktion 𝑓:ℝ𝑛 → ℝ𝑚 ist dann im Punkt 𝑥 = 𝑥 1, … , 𝑥 𝑛𝑇
differenzierbar, wenn es eine 𝑚 × 𝑛 -Matrix 𝐴 gibt, sodass man
sie in der Form 𝑓 𝑥 = 𝑓 𝑥1, … , 𝑥𝑛
𝑇 = 𝑓 𝑥 + 𝐴 ∙ 𝑥 − 𝑥 + 𝑟(𝑥)
schreiben kann und der Fehler 𝑟(𝑥) von
höherer als erster Ordnung verschwindet:
lim𝑥→𝑥
𝑟(𝑥)
𝑥−𝑥 = 0
Die Funktion 𝑓 heißt differenzierbar in 𝐵 ⊆ ℝ𝑛, wenn sie in jedem
Punkt 𝑥 ∈ 𝐵 differenzierbar ist.
Bemerkung 3.0.19
Wenn die Funktion 𝑓:ℝ𝑛 → ℝ𝑚 im Punkt 𝑥 differenzierbar ist, dann
gilt:
𝐴 ≡ 𝐷𝑥 𝑓
Differentialgeometrie 3.17 Jürgen Roth
3.1 Reguläre Flächen
Kapitel 3: Klassische Flächentheorie
Differentialgeometrie 3.18 Jürgen Roth
Flächen im ℝ𝟑
Bemerkung 3.1.1
Flächen im dreidimensionalen Raum sind zweidimensionale
Objekte, d. h. die Punkte auf einer Fläche können durch zwei
unabhängige reelle Parameter beschrieben werden.
Die folgende Definition einer regulären Fläche ist lokal. Im
Gegensatz zu Kurven, die immer als Ganzes parametrisiert
wurden, wird bei Flächen nur verlangt, dass jeweils kleine Stücke
der Fläche durch eine Parametrisierung beschrieben werden
können.
Differentialgeometrie 3.19 Jürgen Roth
Reguläre Fläche
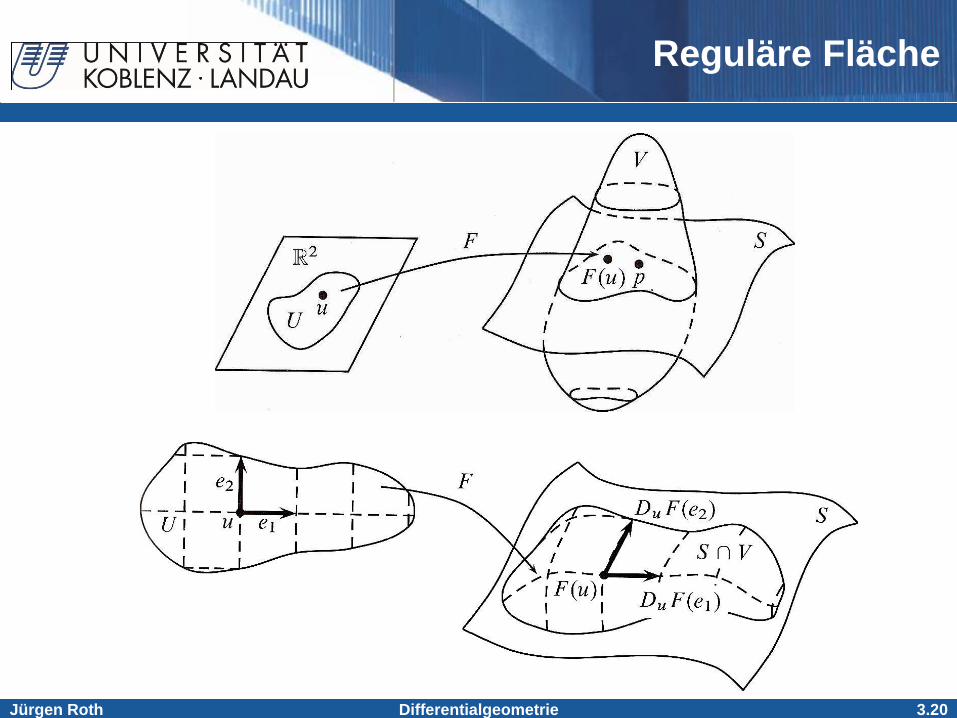
Definition 3.1.2
𝑆 ⊂ ℝ3 heißt reguläre Fläche, wenn es zu jedem Punkt 𝑝 ∈ 𝑆 eine
offene Umgebung 𝑉 ⊂ ℝ3 von 𝑝, sowie eine offene Teilmenge
𝑈 ⊂ ℝ2 und eine glatte Abbildung 𝐹:𝑈 → ℝ3 gibt, so dass gilt:
(1) 𝐹 𝑈 = 𝑆 ∩ 𝑉 und 𝐹:𝑈 → 𝑆 ∩ 𝑉 ist ein Homöomorphismus
(d.h. 𝐹 ist bijektiv und sowohl 𝐹 als auch die
zugehörige Umkehrabbildung 𝐹−1 sind stetig).
(2) Die Jacobi-Matrix 𝐷𝑢𝐹 hat für jeden Punkt 𝑢 ∈ 𝑈
den Rang 2.
Bemerkung 3.1.3
Bedingung (1) bedeutet, dass die Punkte auf der Fläche 𝑆, die nahe bei 𝑝
liegen, die also auch in 𝑉 sind, über die Abbildung 𝐹 durch zwei Parame-
ter beschrieben werden, nämlich die Koordinaten der Punkte aus 𝑈 ⊂ ℝ2.
Bedingung (2) sorgt dafür, dass die beiden Parameter auch wirklich linear
unabhängig sind.
Differentialgeometrie 3.20 Jürgen Roth
Reguläre Fläche
Differentialgeometrie 3.21 Jürgen Roth
Lokale Parametrisierung
Definition 3.1.4
Die Abbildung 𝐹:𝑈 → 𝑆 ∩ 𝑉 aus Definition 3.1.2 bzw. das Tripel
𝑈, 𝐹, 𝑉 heißt lokale Parametrisierung von 𝑆 um 𝑝.
Die Menge 𝑆 ∩ 𝑉 heißt Koordinatenumgebung von 𝑝.
Die Komponenten 𝑢1 und 𝑢2 von 𝑢 = 𝑢1, 𝑢2 𝑇 heißen dann auch
Koordinaten des Punktes 𝐹 𝑢 ∈ 𝑆 bzgl. der Parametrisierung 𝐹.
Beispiel 3.1.5: Affine Ebene
Einfache Beispiele regulärer Flächen sind die affinen Ebenen. Die
affine Ebene durch den Punkt 𝑝 ∈ ℝ3, aufgespannt durch die linear
unabhängigen Vektoren 𝑋, 𝑌 ∈ ℝ3, ist folgende Menge:
𝑆 = 𝑝 + 𝑢1 ∙ 𝑋 + 𝑢2 ∙ 𝑌 𝑢1, 𝑢2 ∈ ℝ
Man kommt hier mit einer einzigen Parametrisierung für den
ganzen ℝ3 aus. Man kann nämlich setzen: 𝑉 ≔ ℝ3, 𝑈 ≔ ℝ2 und 𝐹:𝑈 → ℝ3, 𝑢1, 𝑢2 ↦ 𝑝 + 𝑢1 ∙ 𝑋 + 𝑢2 ∙ 𝑌
Differentialgeometrie 3.22 Jürgen Roth
𝑥
𝑓 𝑥, 𝑦 = 𝑥 ∙ 𝑦
𝑦
𝑧
Beispiel: Funktionsgraphen
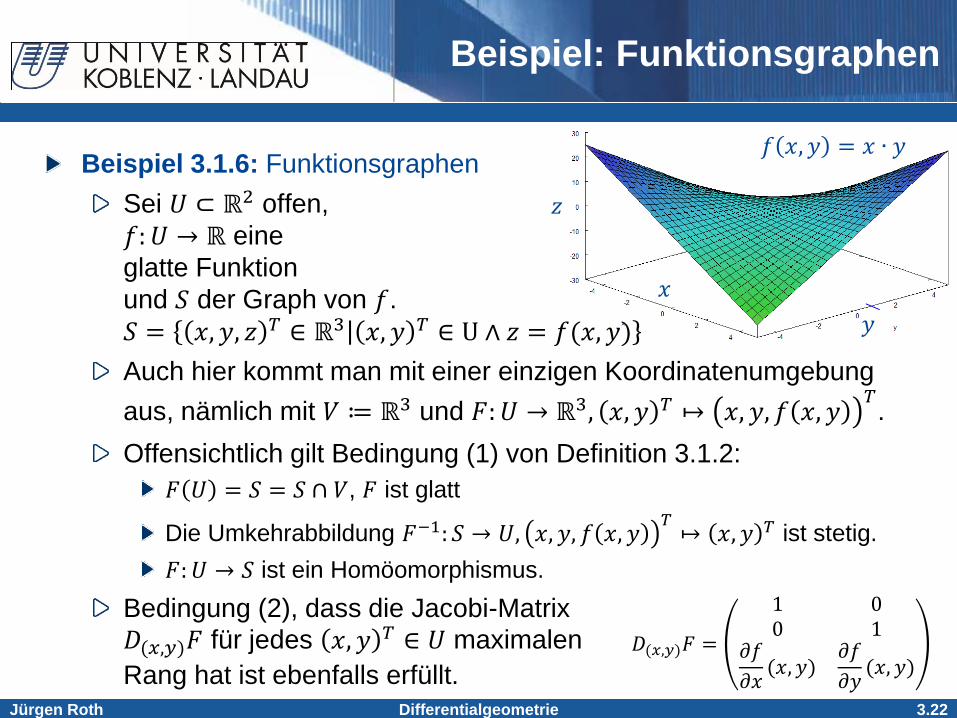
Beispiel 3.1.6: Funktionsgraphen
Sei 𝑈 ⊂ ℝ2 offen,
𝑓: 𝑈 → ℝ eine
glatte Funktion
und 𝑆 der Graph von 𝑓.
𝑆 = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥, 𝑦 𝑇 ∈ U ∧ 𝑧 = 𝑓(𝑥, 𝑦)
Auch hier kommt man mit einer einzigen Koordinatenumgebung
aus, nämlich mit 𝑉 ≔ ℝ3 und 𝐹:𝑈 → ℝ3, 𝑥, 𝑦 𝑇 ↦ 𝑥, 𝑦, 𝑓 𝑥, 𝑦𝑇.
Offensichtlich gilt Bedingung (1) von Definition 3.1.2:
𝐹 𝑈 = 𝑆 = 𝑆 ∩ 𝑉, 𝐹 ist glatt
Die Umkehrabbildung 𝐹−1: 𝑆 → 𝑈, 𝑥, 𝑦, 𝑓 𝑥, 𝑦𝑇
↦ 𝑥, 𝑦 𝑇 ist stetig.
𝐹:𝑈 → 𝑆 ist ein Homöomorphismus.
Bedingung (2), dass die Jacobi-Matrix
𝐷(𝑥,𝑦)𝐹 für jedes 𝑥, 𝑦 𝑇 ∈ 𝑈 maximalen
Rang hat ist ebenfalls erfüllt.
𝐷(𝑥,𝑦)𝐹 =
1 00 1
𝜕𝑓
𝜕𝑥(𝑥, 𝑦)
𝜕𝑓
𝜕𝑦(𝑥, 𝑦)
Differentialgeometrie 3.23 Jürgen Roth
Beispiel: Sphäre
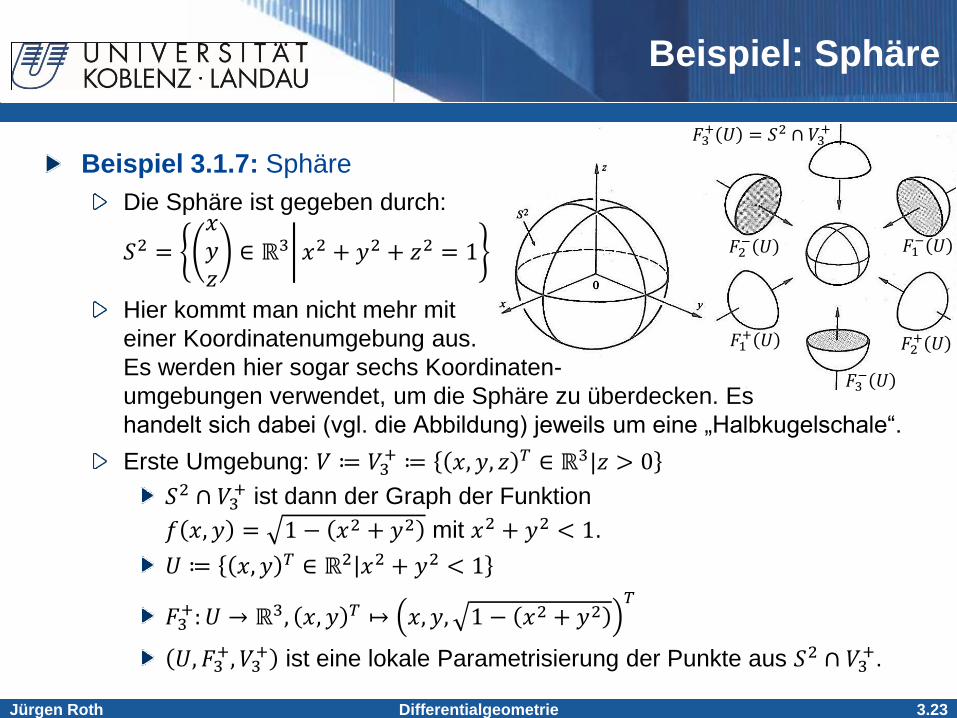
Beispiel 3.1.7: Sphäre
Die Sphäre ist gegeben durch:
𝑆2 =𝑥𝑦𝑧
∈ ℝ3 𝑥2 + 𝑦2 + 𝑧2 = 1
Hier kommt man nicht mehr mit
einer Koordinatenumgebung aus.
Es werden hier sogar sechs Koordinaten-
umgebungen verwendet, um die Sphäre zu überdecken. Es
handelt sich dabei (vgl. die Abbildung) jeweils um eine „Halbkugelschale“.
Erste Umgebung: 𝑉 ≔ 𝑉3+ ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑧 > 0
𝑆2 ∩ 𝑉3+ ist dann der Graph der Funktion
𝑓 𝑥, 𝑦 = 1 − 𝑥2 + 𝑦2 mit 𝑥2 + 𝑦2 < 1.
𝑈 ≔ 𝑥, 𝑦 𝑇 ∈ ℝ2 𝑥2 + 𝑦2 < 1
𝐹3+: 𝑈 → ℝ3, 𝑥, 𝑦 𝑇 ↦ 𝑥, 𝑦, 1 − 𝑥2 + 𝑦2
𝑇
𝑈, 𝐹3+, 𝑉3
+ ist eine lokale Parametrisierung der Punkte aus 𝑆2 ∩ 𝑉3+.
𝐹3+ 𝑈 = 𝑆2 ∩ 𝑉3
+
𝐹3− 𝑈
𝐹1− 𝑈
𝐹1+ 𝑈 𝐹2
+ 𝑈
𝐹2− 𝑈
Differentialgeometrie 3.24 Jürgen Roth
Beispiel: Sphäre
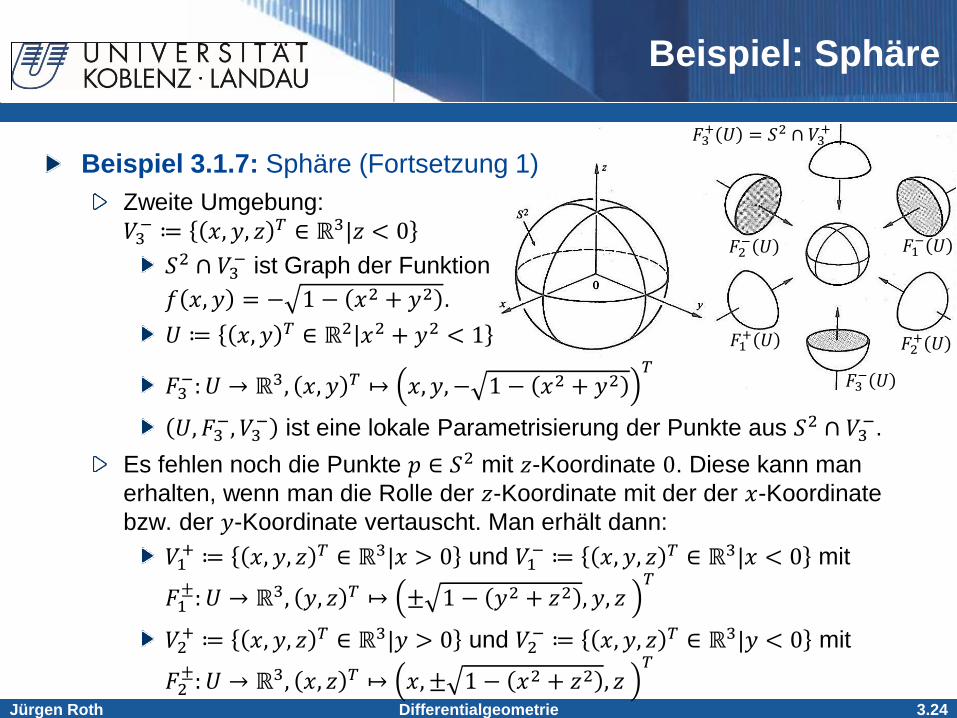
Beispiel 3.1.7: Sphäre (Fortsetzung 1)
Zweite Umgebung:
𝑉3− ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑧 < 0
𝑆2 ∩ 𝑉3− ist Graph der Funktion
𝑓 𝑥, 𝑦 = − 1 − 𝑥2 + 𝑦2 .
𝑈 ≔ 𝑥, 𝑦 𝑇 ∈ ℝ2 𝑥2 + 𝑦2 < 1
𝐹3−: 𝑈 → ℝ3, 𝑥, 𝑦 𝑇 ↦ 𝑥, 𝑦, − 1 − 𝑥2 + 𝑦2
𝑇
𝑈, 𝐹3−, 𝑉3
− ist eine lokale Parametrisierung der Punkte aus 𝑆2 ∩ 𝑉3−.
Es fehlen noch die Punkte 𝑝 ∈ 𝑆2 mit 𝑧-Koordinate 0. Diese kann man
erhalten, wenn man die Rolle der 𝑧-Koordinate mit der der 𝑥-Koordinate
bzw. der 𝑦-Koordinate vertauscht. Man erhält dann:
𝑉1+ ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥 > 0 und 𝑉1
− ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥 < 0 mit
𝐹1±: 𝑈 → ℝ3, 𝑦, 𝑧 𝑇 ↦ ± 1 − 𝑦2 + 𝑧2 , 𝑦, 𝑧
𝑇
𝑉2+ ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑦 > 0 und 𝑉2
− ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑦 < 0 mit
𝐹2±: 𝑈 → ℝ3, 𝑥, 𝑧 𝑇 ↦ 𝑥,± 1 − 𝑥2 + 𝑧2 , 𝑧
𝑇
𝐹3+ 𝑈 = 𝑆2 ∩ 𝑉3
+
𝐹3− 𝑈
𝐹1− 𝑈
𝐹1+ 𝑈 𝐹2
+ 𝑈
𝐹2− 𝑈
Differentialgeometrie 3.25 Jürgen Roth
Beispiel: Sphäre
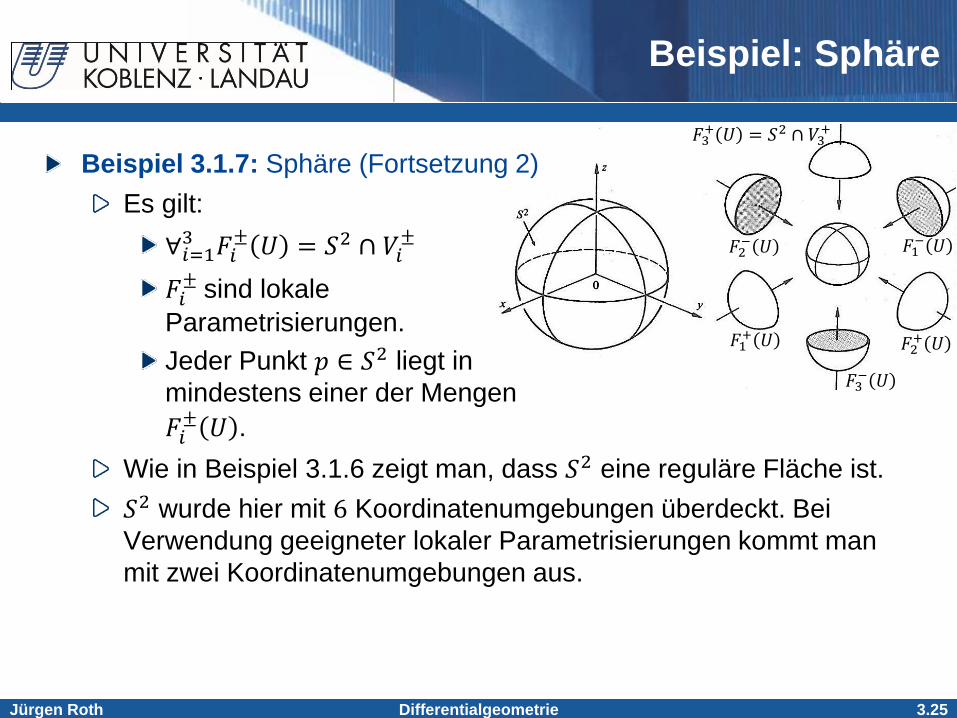
Beispiel 3.1.7: Sphäre (Fortsetzung 2)
Es gilt:
∀𝑖=13 𝐹𝑖
± 𝑈 = 𝑆2 ∩ 𝑉𝑖±
𝐹𝑖± sind lokale
Parametrisierungen.
Jeder Punkt 𝑝 ∈ 𝑆2 liegt in
mindestens einer der Mengen
𝐹𝑖± 𝑈 .
Wie in Beispiel 3.1.6 zeigt man, dass 𝑆2 eine reguläre Fläche ist.
𝑆2 wurde hier mit 6 Koordinatenumgebungen überdeckt. Bei
Verwendung geeigneter lokaler Parametrisierungen kommt man
mit zwei Koordinatenumgebungen aus.
𝐹3+ 𝑈 = 𝑆2 ∩ 𝑉3
+
𝐹3− 𝑈
𝐹1− 𝑈
𝐹1+ 𝑈 𝐹2
+ 𝑈
𝐹2− 𝑈
Differentialgeometrie 3.26 Jürgen Roth
Beispiel: Sphäre
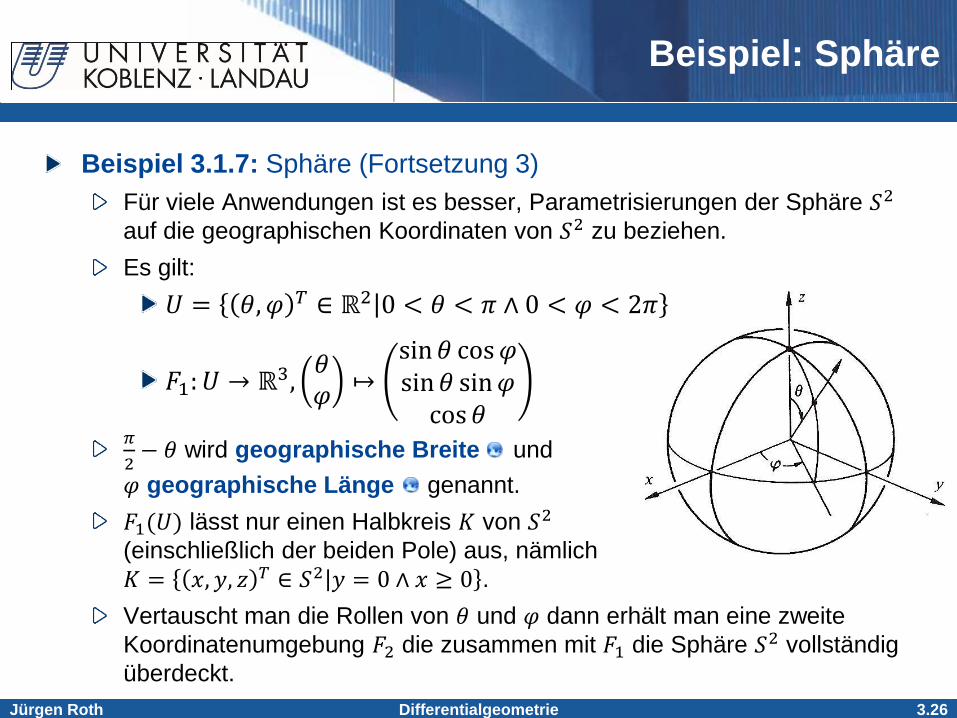
Beispiel 3.1.7: Sphäre (Fortsetzung 3)
Für viele Anwendungen ist es besser, Parametrisierungen der Sphäre 𝑆2
auf die geographischen Koordinaten von 𝑆2 zu beziehen.
Es gilt:
𝑈 = 𝜃, 𝜑 𝑇 ∈ ℝ2 0 < 𝜃 < 𝜋 ∧ 0 < 𝜑 < 2𝜋
𝐹1: 𝑈 → ℝ3,𝜃𝜑
↦sin𝜃 cos𝜑sin 𝜃 sin𝜑
cos 𝜃
𝜋
2− 𝜃 wird geographische Breite und
𝜑 geographische Länge genannt.
𝐹1(𝑈) lässt nur einen Halbkreis 𝐾 von 𝑆2
(einschließlich der beiden Pole) aus, nämlich
𝐾 = 𝑥, 𝑦, 𝑧 𝑇 ∈ 𝑆2 𝑦 = 0 ∧ 𝑥 ≥ 0 .
Vertauscht man die Rollen von 𝜃 und 𝜑 dann erhält man eine zweite
Koordinatenumgebung 𝐹2 die zusammen mit 𝐹1 die Sphäre 𝑆2 vollständig
überdeckt.
Differentialgeometrie 3.27 Jürgen Roth
Regularitätskriterium
für Flächen
Bemerkung 3.1.8
Das Finden von lokalen Parametrisierungen kann sehr mühsam
sein. Es ist deshalb hilfreich, wenn man für die Entscheidung, ob
eine Teilmenge 𝑆 ⊂ ℝ3 eine reguläre Fläche ist, weitere Kriterien
zur Verfügung hat.
Oft ist die Menge 𝑆 wie folgt über eine implizite Gleichung definiert
𝑆 ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑓 𝑥, 𝑦, 𝑧 = 0 . Das Kriterium in Satz 3.1.9
besagt: Wenn der Gradient von 𝑓 für keinen Punkt von 𝑆 gleich
Null ist, dann ist 𝑆 eine reguläre Fläche.
Satz 3.1.9: Regularitätskriterium für Flächen
Es sei 𝑉 ⊂ ℝ3 offen, 𝑓: 𝑉 → ℝ eine glatte Funktion und
𝑆 ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ 𝑉 𝑓 𝑥, 𝑦, 𝑧 = 0 . Wenn gilt
∀𝑝∈𝑆 grad 𝑓 𝑝 ≠ 0,0,0 𝑇
dann ist 𝑆 eine reguläre Fläche.
Differentialgeometrie 3.28 Jürgen Roth
Regularitätskriterium
für Flächen
Beispiel 3.1.10: Ellipsoid
𝑆 ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥2
𝑎2 +𝑦2
𝑏2 +𝑧2
𝑐2 = 1
mit 𝑎, 𝑏, 𝑐 ∈ ℝ\*0+ ist ein Ellipsoid.
Mit 𝑉 ≔ ℝ3 und 𝑓:ℝ3 → ℝ,
𝑥, 𝑦, 𝑧 𝑇 ↦𝑥2
𝑎2 +𝑦2
𝑏2 +𝑧2
𝑐2 − 1
lässt sich 𝑆 schreiben als
𝑆 ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑓 𝑥, 𝑦, 𝑧 = 0 .
Um das Regularitätskriterium aus Satz 3.1.9 anwenden zu können,
muss der Gradient bestimmt werden:
grad 𝑓(𝑥, 𝑦, 𝑧) =2𝑥
𝑎2,2𝑦
𝑏2,2𝑧
𝑐2
𝑇
Der Gradient nimmt nur im Punkt 𝑝0 = 0,0,0 𝑇 den Wert Null an.
Da 𝑝0 ∉ 𝑆 (wegen 𝑓 0,0,0 ≠ 0), ist 𝑆 eine reguläre Fläche.
Differentialgeometrie 3.29 Jürgen Roth
Regularitätskriterium
für Flächen
Bemerkung 3.1.11
Wenn 𝑆 in der Form 𝑆 ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑓 𝑥, 𝑦, 𝑧 = 0 gegeben
ist, dann ist ∀𝑝∈𝑆 grad 𝑓 𝑝 ≠ 0,0,0 𝑇 eine hinreichende aber
keine notwendige Bedingung dafür, dass 𝑆 regulär ist.
Man kann die Sphäre z. B. auch als Nullstellengebilde der
Funktion 𝑓 𝑥, 𝑦, 𝑧 = 𝑥2 + 𝑦2 + 𝑧2 − 1 2 schreiben:
𝑆2 = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥2 + 𝑦2 + 𝑧2 − 1 2 = 0
Für den Gradienten von 𝑓 gilt:
grad 𝑓 𝑥, 𝑦, 𝑧 = 2 ∙ 𝑥2 + 𝑦2 + 𝑧2 − 1 ∙2𝑥2𝑦2𝑧
Hier nimmt grad 𝑓 sogar für alle 𝑝 ∈ 𝑆 den Wert 0,0,0 𝑇 an.
Trotzdem ist die Sphäre 𝑆2 eine reguläre Fläche, die
beschreibende Funktion 𝑓 war nur ungeschickt gewählt.
Differentialgeometrie 3.30 Jürgen Roth
Regularitätskriterium
für Flächen
Aufgaben 3.1.12
Zeigen Sie: Wenn 𝑆 ⊂ ℝ3 eine reguläre Fläche und 𝑊 ⊂ ℝ3 offen
ist, dann ist auch 𝑊 ∩ 𝑆 eine reguläre Fläche.
Die Eigenschaft „reguläre Fläche“ ist eine lokale Eigenschaft.
Zu zeigen ist also: Wenn es für jeden Punkt 𝑝 ∈ 𝑆 ⊂ ℝ3 in ℝ3 eine
offenen Umgebung 𝑉 von 𝑝 gibt, so dass 𝑉 ∩ 𝑆 eine reguläre
Fläche ist, dann ist auch 𝑆 selbst eine reguläre Fläche.
Lösungshinweise: Bär (2010, S. 299), Aufgaben 3.2 und 3.3
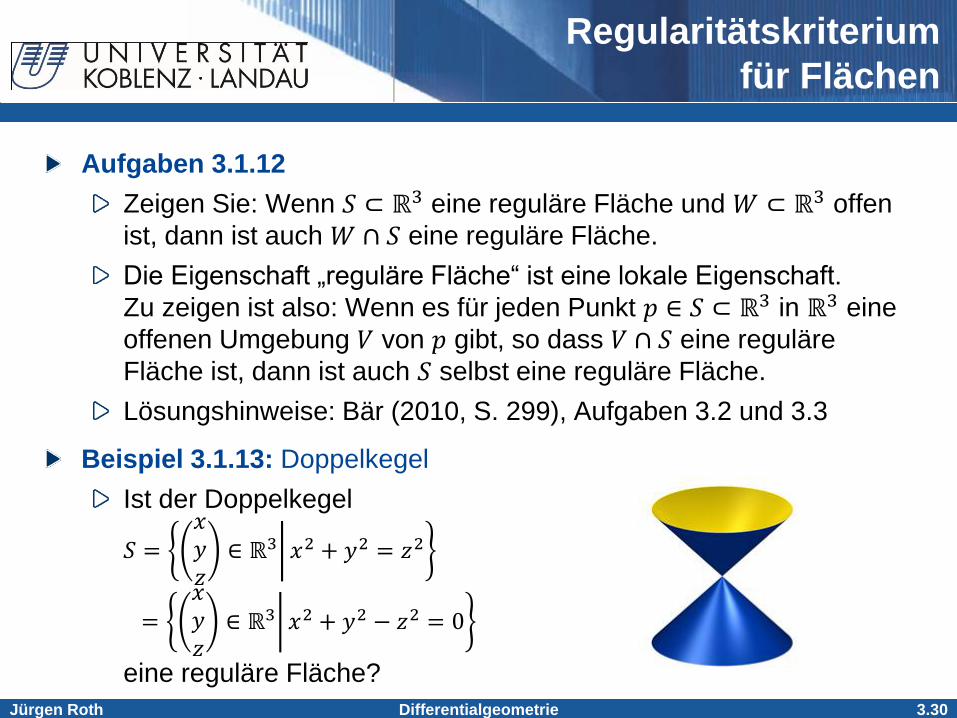
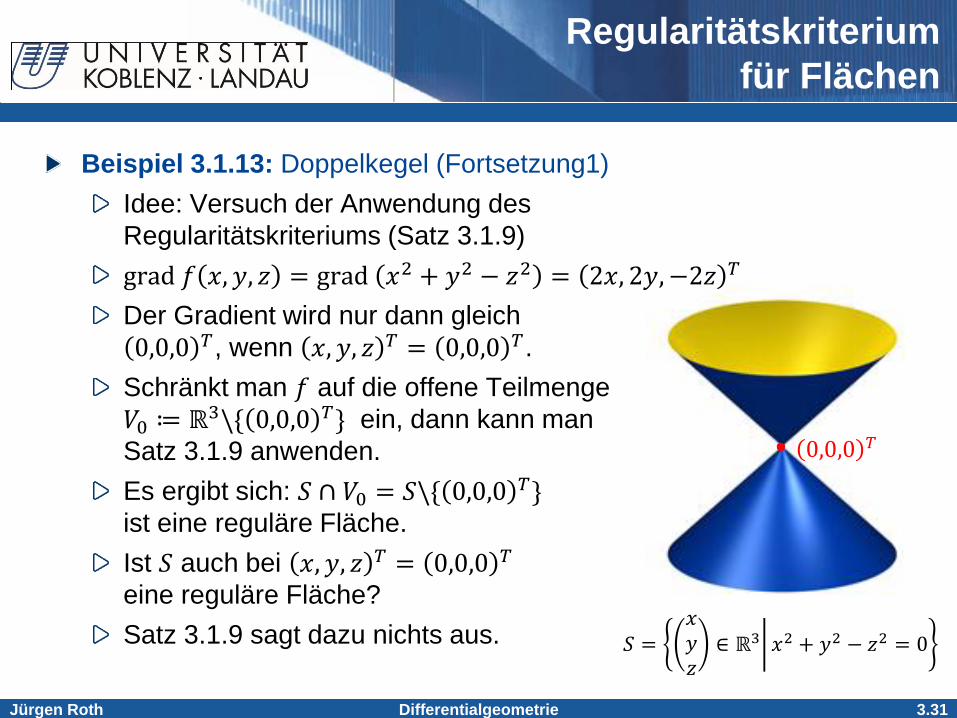
Beispiel 3.1.13: Doppelkegel
Ist der Doppelkegel
𝑆 =𝑥𝑦𝑧
∈ ℝ3 𝑥2 + 𝑦2 = 𝑧2
=𝑥𝑦𝑧
∈ ℝ3 𝑥2 + 𝑦2 − 𝑧2 = 0
eine reguläre Fläche?
Differentialgeometrie 3.31 Jürgen Roth
Regularitätskriterium
für Flächen
Beispiel 3.1.13: Doppelkegel (Fortsetzung1)
Idee: Versuch der Anwendung des
Regularitätskriteriums (Satz 3.1.9)
grad 𝑓 𝑥, 𝑦, 𝑧 = grad 𝑥2 + 𝑦2 − 𝑧2 = 2𝑥, 2𝑦,−2𝑧 𝑇
Der Gradient wird nur dann gleich
0,0,0 𝑇, wenn 𝑥, 𝑦, 𝑧 𝑇 = 0,0,0 𝑇.
Schränkt man 𝑓 auf die offene Teilmenge
𝑉0 ≔ ℝ3\* 0,0,0 𝑇+ ein, dann kann man
Satz 3.1.9 anwenden.
Es ergibt sich: 𝑆 ∩ 𝑉0 = 𝑆\* 0,0,0 𝑇+ ist eine reguläre Fläche.
Ist 𝑆 auch bei 𝑥, 𝑦, 𝑧 𝑇 = 0,0,0 𝑇
eine reguläre Fläche?
Satz 3.1.9 sagt dazu nichts aus. 𝑆 =𝑥𝑦𝑧
∈ ℝ3 𝑥2 + 𝑦2 − 𝑧2 = 0
0,0,0 𝑇
Differentialgeometrie 3.32 Jürgen Roth
Regularitätskriterium
für Flächen
Beispiel 3.1.13: Doppelkegel (Fortsetzung2)
Annahme: 𝑆 ist eine reguläre Fläche.
Dann gibt es eine lokale Parametrisierung um 𝑝 = 0,0,0 𝑇, d. h. eine
offene Teilmenge 𝑉 ⊂ ℝ3, eine offene Teilmenge 𝑈 ⊂ ℝ2 sowie eine
glatte Abbildung 𝐹:𝑈 → V mit 𝐹 𝑈 = 𝑆 ∩ 𝑉 und 𝐹:𝑈 → 𝑆 ∩ V ist ein
Homöomorphismus.
𝑢0 ≔ 𝐹−1 0,0,0 𝑇 ∈ 𝑈
Da 𝑈 eine offene Umgebung von 𝑢0 ist, existiert
eine offene Kreisscheibe 𝑈′ ⊂ 𝑈 mit Mittelpunkt 𝑢0.
Weil 𝐹:𝑈 → 𝑆 ∩ V ein Homöomorphismus ist,
ist 𝐹(𝑈′) eine offene Teilmenge von 𝑆 ∩ V.
Damit gibt es eine offene Menge 𝑉′ ⊂ 𝑉 ⊂ ℝ3 mit 𝐹 𝑈′ = 𝑆 ∩ 𝑉′.
Da 𝑉′ eine offene Umgebung von 0,0,0 𝑇 ist, sind alle Vektoren, mit
ausreichend kleiner Länge in 𝑉′ enthalten. Insbesondere liegen auch
Punkte 𝑝1 = 𝑥1, 𝑦1, 𝑧1𝑇 mit 𝑧1 > 0 und 𝑝2 = 𝑥2, 𝑦2, 𝑧2
𝑇 mit 𝑧2 < 0 in
𝑆 ∩ 𝑉′.
Differentialgeometrie 3.33 Jürgen Roth
Regularitätskriterium
für Flächen
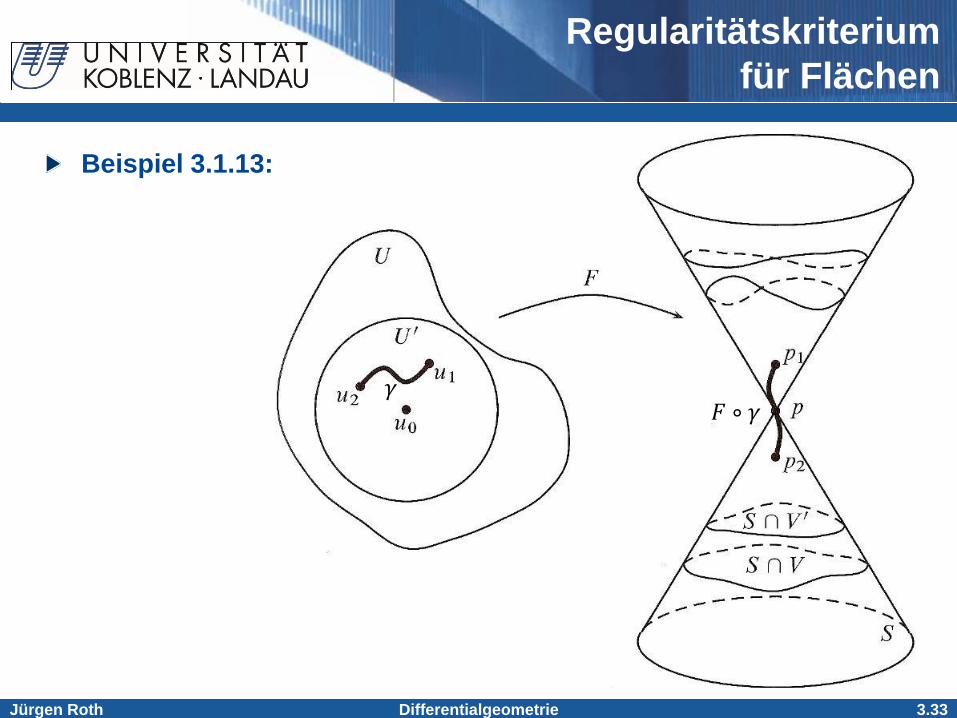
Beispiel 3.1.13: Doppelkegel (Fortsetzung 3)
𝐹 ∘ 𝛾 𝛾
Differentialgeometrie 3.34 Jürgen Roth
Regularitätskriterium
für Flächen
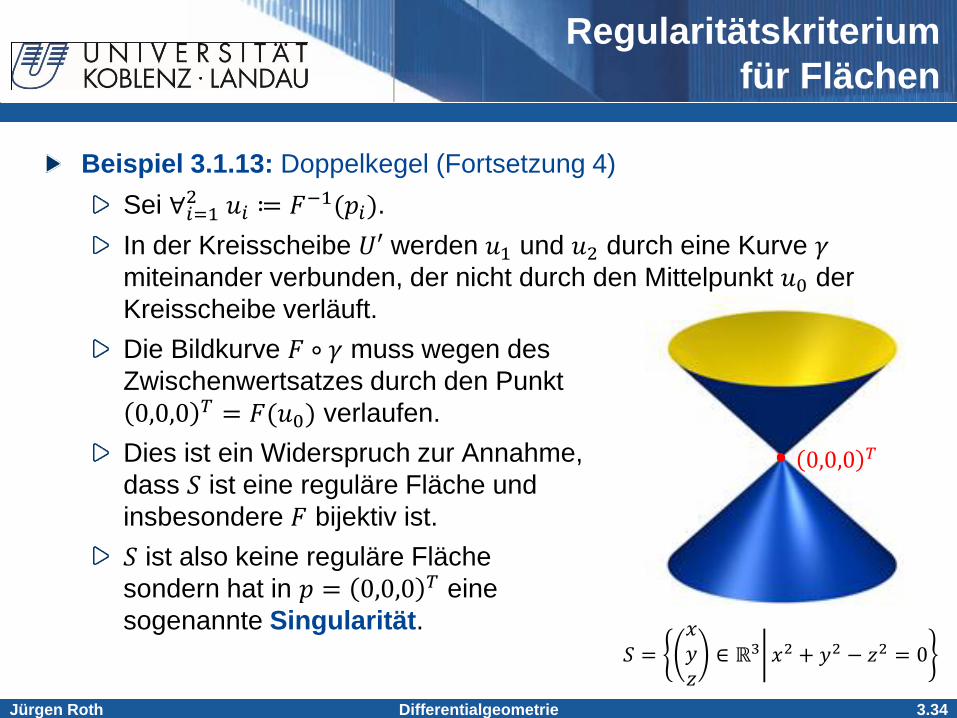
Beispiel 3.1.13: Doppelkegel (Fortsetzung 4)
Sei ∀𝑖=12 𝑢𝑖 ≔ 𝐹−1(𝑝𝑖).
In der Kreisscheibe 𝑈′ werden 𝑢1 und 𝑢2 durch eine Kurve 𝛾
miteinander verbunden, der nicht durch den Mittelpunkt 𝑢0 der
Kreisscheibe verläuft.
Die Bildkurve 𝐹 ∘ 𝛾 muss wegen des
Zwischenwertsatzes durch den Punkt
0,0,0 𝑇 = 𝐹(𝑢0) verlaufen.
Dies ist ein Widerspruch zur Annahme,
dass 𝑆 ist eine reguläre Fläche und
insbesondere 𝐹 bijektiv ist.
𝑆 ist also keine reguläre Fläche
sondern hat in 𝑝 = 0,0,0 𝑇 eine
sogenannte Singularität.
𝑆 =𝑥𝑦𝑧
∈ ℝ3 𝑥2 + 𝑦2 − 𝑧2 = 0
0,0,0 𝑇
Differentialgeometrie 3.35 Jürgen Roth
Glatte Abbildungen
Bemerkung 3.1.14
Im Folgenden wird die Differenzierbarkeit von Abbildungen untersucht,
deren Definitions- und/oder Wertebereich in einer regulären Fläche liegen.
„Glatt“ bedeutet immer „unendlich oft differenzierbar“.
Satz 3.1.15
Wenn
𝑆 ⊂ ℝ3 eine reguläre Fläche,
(𝑈, 𝐹, 𝑉) eine lokale Parametrisierung von 𝑆,
𝑊 ⊂ ℝ𝑛 eine offenen Menge und
𝜑:𝑊 → ℝ3 eine Abbildung mit 𝜑 𝑊 ⊂ 𝑆 ∩ 𝑉
ist, dann gilt:
𝜑 ist genau dann eine glatte Abbildung,
wenn 𝐹−1 ∘ 𝜑:𝑊 → 𝑈 ⊂ ℝ2 glatt ist. Beweis: Vgl.
Bär (2010), S. 100f
Differentialgeometrie 3.36 Jürgen Roth
Glatte Abbildungen
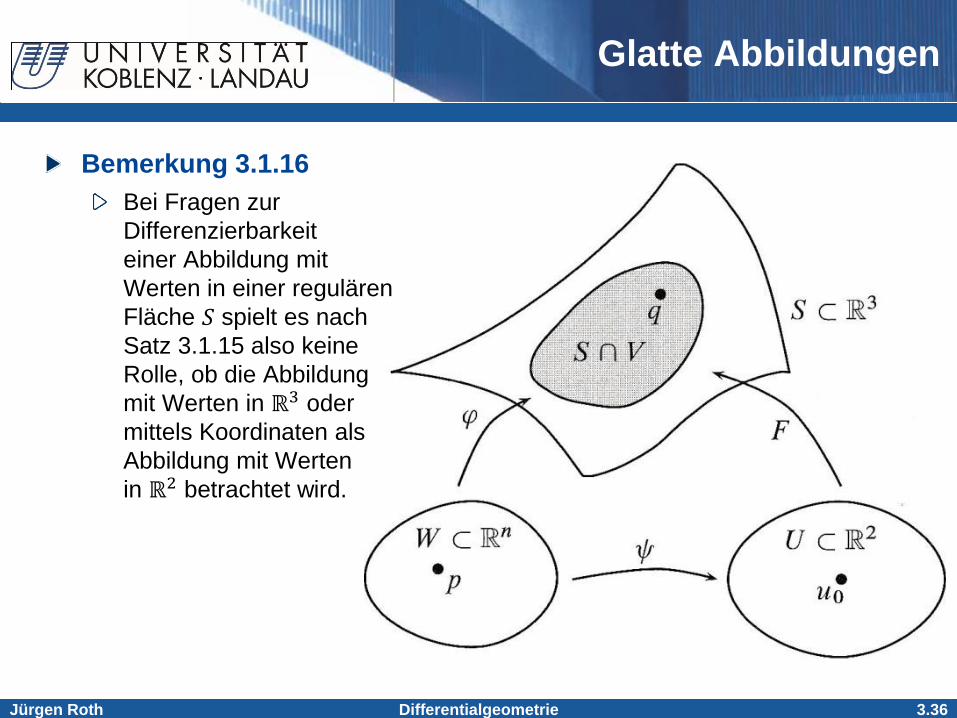
Bemerkung 3.1.16
Bei Fragen zur
Differenzierbarkeit
einer Abbildung mit
Werten in einer regulären
Fläche 𝑆 spielt es nach
Satz 3.1.15 also keine
Rolle, ob die Abbildung
mit Werten in ℝ3 oder
mittels Koordinaten als
Abbildung mit Werten
in ℝ2 betrachtet wird.
Differentialgeometrie 3.37 Jürgen Roth
Glatte Abbildungen
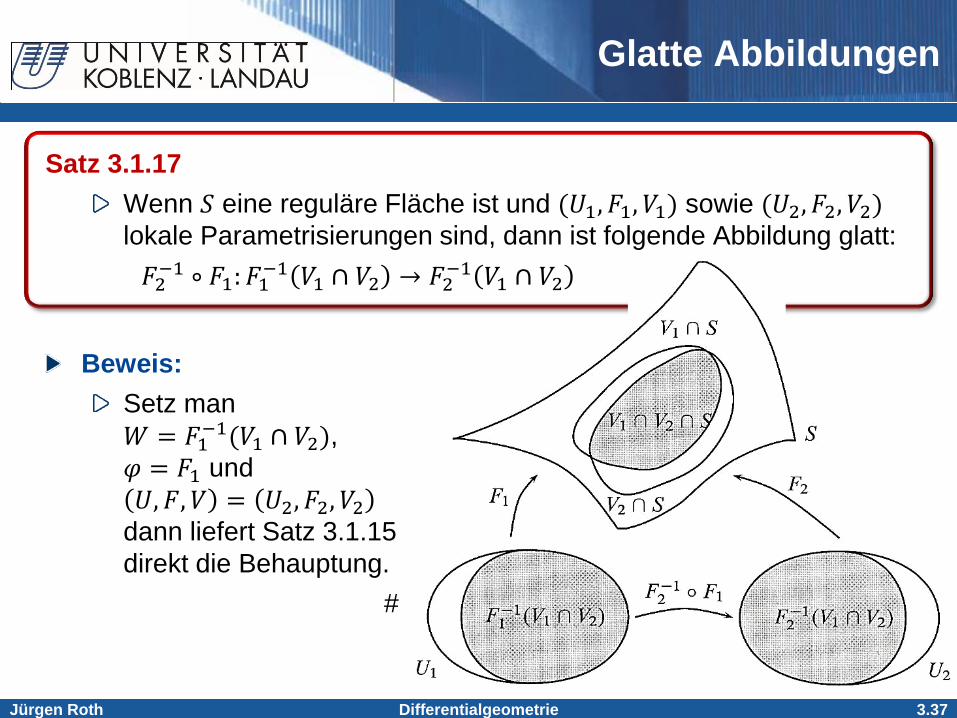
Satz 3.1.17
Wenn 𝑆 eine reguläre Fläche ist und (𝑈1, 𝐹1, 𝑉1) sowie (𝑈2, 𝐹2, 𝑉2) lokale Parametrisierungen sind, dann ist folgende Abbildung glatt:
𝐹2−1 ∘ 𝐹1: 𝐹1
−1 𝑉1 ∩ 𝑉2 → 𝐹2−1 𝑉1 ∩ 𝑉2
Beweis:
Setz man
𝑊 = 𝐹1−1(𝑉1 ∩ 𝑉2),
𝜑 = 𝐹1 und
𝑈, 𝐹, 𝑉 = 𝑈2, 𝐹2, 𝑉2
dann liefert Satz 3.1.15
direkt die Behauptung.
#
Differentialgeometrie 3.38 Jürgen Roth
Glatte Abbildungen
Beispiel 3.1.18
Wir betrachten eine solche Parametertransformation im Fall der
Sphäre 𝑆 = 𝑆2. Wie in Beispiel 3.1.7 ist:
𝐹1 = 𝐹1+: 𝑈 → ℝ3, 𝑦, 𝑧 𝑇 ↦ 1 − 𝑦2 + 𝑧2 , 𝑦, 𝑧
𝑇
𝐹2 = 𝐹2−: 𝑈 → ℝ3, 𝑥, 𝑧 𝑇 ↦ 𝑥, − 1 − 𝑥2 + 𝑧2 , 𝑧
𝑇
Dann ist 𝑉1 ∩ 𝑉2 = 𝑉1+ ∩ 𝑉2
− = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥 > 0 ∧ 𝑦 < 0
und damit 𝐹1−1 𝑉1 ∩ 𝑉2 = 𝑦, 𝑧 𝑇 ∈ ℝ2 𝑦2 + 𝑧2 < 1 ∧ 𝑦 < 0
sowie 𝐹2−1 𝑉1 ∩ 𝑉2 = 𝑥, 𝑧 𝑇 ∈ ℝ2 𝑥2 + 𝑧2 < 1 ∧ 𝑥 > 0 .
Für 𝐹2−1 ∘ 𝐹1 ergibt sich:
𝐹2−1 𝐹1 𝑦, 𝑧 = 𝐹2
−1 1 − 𝑦2 − 𝑧2, 𝑦, 𝑧 = 1 − 𝑦2 − 𝑧2
𝑧
Dies ist eine glatte Abbildung.
Differentialgeometrie 3.39 Jürgen Roth
Differenzierbarkeit von
Abbildungen 𝑓 mit 𝔻𝒇 ⊂ 𝑺
Satz 3.1.19
Sei 𝑆 ⊂ ℝ3 eine reguläre Fläche, 𝑝 ∈ S und 𝑓: 𝑆 → ℝ𝑛 eine Abbildung.
Dann sind folgende Aussagen äquivalent:
(1) Es gibt eine offene Umgebung 𝑉 von 𝑝 in ℝ3 und eine
Fortsetzung 𝑓 von 𝑓 𝑆∩𝑉 auf 𝑉, die um 𝑝 glatt ist.
(2) Es gibt eine lokale Parametrisierung 𝑈, 𝐹, 𝑉 mit 𝑝 ∈ 𝑉, so dass
𝑓 ∘ 𝐹: 𝑈 → ℝ𝑛 um 𝐹−1(𝑝) glatt ist.
(3) Für alle lokalen Parametrisierungen (𝑈, 𝐹, 𝑉) mit 𝑝 ∈ 𝑉 ist
𝑓 ∘ 𝐹: 𝑈 → ℝ𝑛 um 𝐹−1(𝑝) glatt.
Definition 3.1.20
Gelten die äquivalenten Bedingungen (1) bis (3) aus Satz 3.1.19,
dann heißt 𝑓 glatt nahe 𝒑.
Differentialgeometrie 3.40 Jürgen Roth
Diff‘barkeit von Abbildungen 𝑓
mit 𝔻𝒇 ⊂ 𝑺𝟏 ∧ 𝕎𝒇 ⊂ 𝑺𝟐
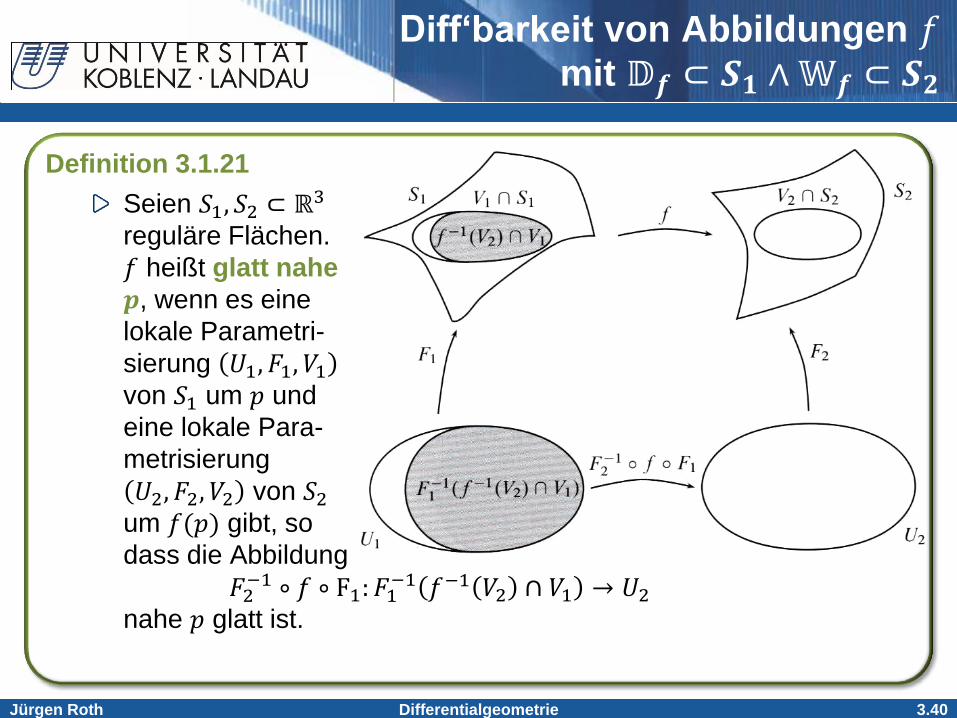
Definition 3.1.21
Seien 𝑆1, 𝑆2 ⊂ ℝ3
reguläre Flächen.
𝑓 heißt glatt nahe
𝒑, wenn es eine
lokale Parametri-
sierung 𝑈1, 𝐹1, 𝑉1
von 𝑆1 um 𝑝 und
eine lokale Para-
metrisierung
𝑈2, 𝐹2, 𝑉2 von 𝑆2
um 𝑓(𝑝) gibt, so
dass die Abbildung
𝐹2−1 ∘ 𝑓 ∘ F1: 𝐹1
−1 𝑓−1 𝑉2 ∩ 𝑉1 → 𝑈2
nahe 𝑝 glatt ist.
Differentialgeometrie 3.41 Jürgen Roth
Diff‘barkeit von Abbildungen 𝑓
mit 𝔻𝒇 ⊂ 𝑺𝟏 ∧ 𝕎𝒇 ⊂ 𝑺𝟐
Bemerkung 3.1.22
Eine Abbildung zwischen zwei regulären Flächen wird also glatt
genannt, wenn sie ausgedrückt in geeigneten Koordinaten glatt ist.
Da nach Satz 3.1.17 Parametertransformationen immer glatt (𝐶∞)
sind, ist eine solche Abbildung unabhängig von den gewählten
Koordinaten glatt.
Sind neben 𝑈𝑖 , 𝐹𝑖 , 𝑉𝑖 auch (𝑈 𝑖, 𝐹 𝑖 , 𝑉 𝑖) lokale Parametrisierungen
von 𝑆𝑖, dann ist mit 𝐹2−1 ∘ 𝑓 ∘ 𝐹1 auch
𝐹 2−1 ∘ 𝑓 ∘ 𝐹 1 = 𝐹 2
−1 ∘ 𝐹2
𝐶∞
∘ 𝐹2−1 ∘ 𝑓 ∘ 𝐹1
𝐶∞
∘ 𝐹1−1 ∘ 𝐹 1
𝐶∞
eine glatte Abbildung.
Diese Bemerkung ist sehr hilfreich, weil sie bedeutet, dass man
die Differenzierbarkeit einer Abbildung 𝑓 in möglichst geschickt
gewählten Koordinaten überprüfen kann.
Differentialgeometrie 3.42 Jürgen Roth
Diffeomorphismus
Definition 3.1.23
Die Abbildung 𝑓: 𝑆1 → S2 einer regulären Fläche 𝑆1 ⊂ ℝ3 auf eine
reguläre Fläche 𝑆2 ⊂ ℝ3 heißt Diffeomorphismus, wenn 𝑓 bijektiv
ist und sowohl 𝑓 als auch 𝑓−1 glatt sind.
Existiert ein solcher Diffeomorphismus 𝑓: 𝑆1 → S2, dann heißen die
regulären Flächen 𝑆1 und 𝑆2 diffeomorph.
Beispiel 3.1.24
Das Ellipsoid 𝑆1 = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥2
𝑎2 +𝑦2
𝑏2 +𝑧2
𝑐2 = 1 mit 𝑎, 𝑏, 𝑐 > 0
und die Sphäre 𝑆2 = 𝑆2 = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥2 + 𝑦2 + 𝑧2 = 1 sind
diffeomorph.
Als Diffeomorphismus lässt sich z. B. folgende Abbildung
verwenden.
𝑓: 𝑆1 → 𝑆2, 𝑥, 𝑦, 𝑧 𝑇 ↦𝑥
𝑎,𝑦
𝑏,𝑧
𝑐
𝑇
Differentialgeometrie 3.43 Jürgen Roth
Diffeomorphismus
Beispiel 3.1.24
𝑆1 = 𝑥, 𝑦, 𝜑(𝑥, 𝑦) 𝑇 ∈ ℝ3 𝑥, 𝑦 𝑇 ∈ 𝑈 ⊂ ℝ2 ist
der Graph einer glatten Funktion 𝜑:𝑈 → ℝ.
𝑆2 = 𝑈 × 0 ⊂ ℝ3 ist das Ebenenstück 𝑈
aufgefasst als Fläche im ℝ3.
𝑆1 und 𝑆2 sind diffeomorph über folgenden Diffeomorphismus:
𝑓: 𝑆1 → S2,𝑥𝑦𝑧
↦𝑥𝑦0
𝑓−1: 𝑆2 → 𝑆1,𝑥𝑦0
↦
𝑥𝑦
𝜑(𝑥, 𝑦)
Differentialgeometrie 3.44 Jürgen Roth
3.2 Die Tangentialebene
Kapitel 3: Klassische Flächentheorie
Differentialgeometrie 3.45 Jürgen Roth
Reguläre Flächen durch
Ebenen annähern
Bemerkung 3.2.1
Die einfachsten regulären Flächen sind die Ebenen,
wie auch die einfachsten Kurven die Geraden sind.
Im Folgenden sollen zum Teil komplizierte reguläre
Flächen durch Ebenen angenähert werden.
Für eine glatte Abbildung 𝐹:𝑈 → ℝ𝑚 einer offenen
Teilmenge 𝑈 des ℝ𝑛 in den ℝ𝑚 ist die Abbildung
ℝ𝑛 → ℝ𝑚, 𝑥 ↦ 𝐹 𝑝 + 𝐷𝑝𝐹(𝑥 − 𝑝)
die erste (die affin-lineare) Näherung von 𝐹 im Punkt 𝑝.
Was ist das geometrische Äquivalent zu 𝐷𝑝𝐹 für
eine reguläre Fläche?
Differentialgeometrie 3.46 Jürgen Roth
Tangentialebene
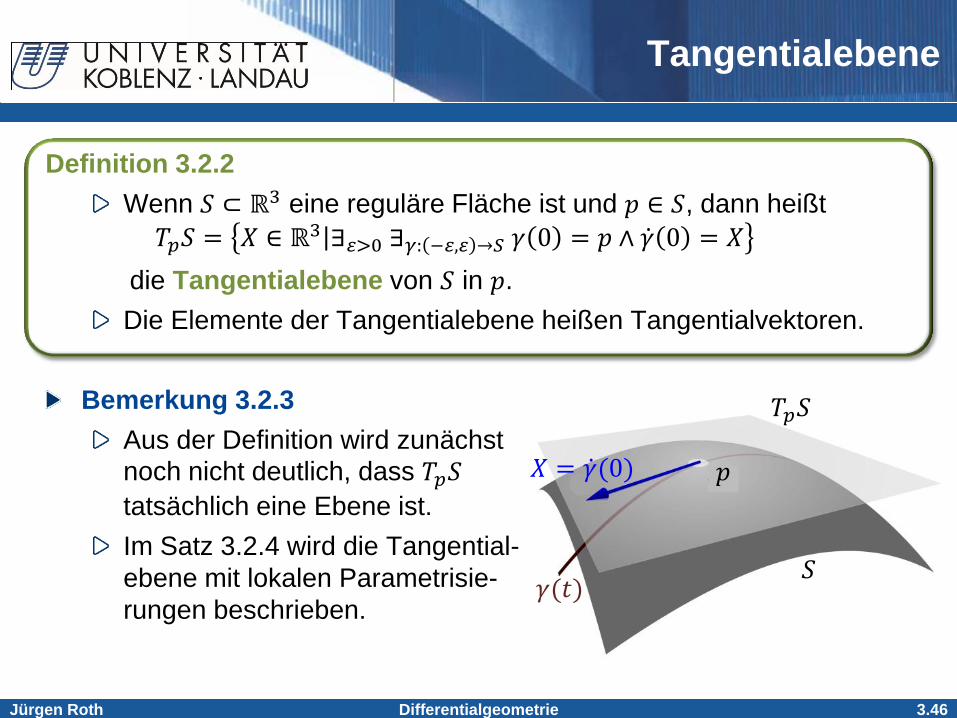
Definition 3.2.2
Wenn 𝑆 ⊂ ℝ3 eine reguläre Fläche ist und 𝑝 ∈ 𝑆, dann heißt
𝑇𝑝𝑆 = 𝑋 ∈ ℝ3 ∃𝜀>0 ∃𝛾: −𝜀,𝜀 →𝑆 𝛾 0 = 𝑝 ∧ 𝛾 0 = 𝑋
die Tangentialebene von 𝑆 in 𝑝.
Die Elemente der Tangentialebene heißen Tangentialvektoren.
Bemerkung 3.2.3
Aus der Definition wird zunächst
noch nicht deutlich, dass 𝑇𝑝𝑆
tatsächlich eine Ebene ist.
Im Satz 3.2.4 wird die Tangential-
ebene mit lokalen Parametrisie-
rungen beschrieben.
𝑇𝑝𝑆
𝑝 𝑋 = 𝛾 (0)
𝛾(𝑡) 𝑆
Differentialgeometrie 3.47 Jürgen Roth
Tangentialebene beschrieben
über lokale Parametrisierung
Satz 3.2.4
Wenn 𝑆 ⊂ ℝ3 eine reguläre Fläche, 𝑝 ∈ 𝑆 und (𝑈, 𝐹, 𝑉) eine lokale
Parametrisierung von 𝑆 um 𝑝 ist, dann gilt mit 𝑢0 ≔ 𝐹−1 𝑝 ∈ 𝑈:
𝑇𝑝𝑆 = Bild 𝐷𝑢0𝐹 = 𝐷𝑢0
𝐹(ℝ2)
Beweis
a) Zu zeigen: 𝑇𝑝𝑆 ⊃ Bild 𝐷𝑢0𝐹
Sei 𝑋 ∈ Bild 𝐷𝑢0𝐹 , dann gilt ∃𝑌∈ℝ2 𝑋 = 𝐷𝑢0
𝐹(𝑌)
Sei 𝛾 𝑡 ≔ 𝐹(𝑢0 + 𝑡 ∙ 𝑌), dann gilt ∃𝜀>0 ∀ 𝑡 <𝜀 𝑢0 + 𝑡 ∙ 𝑌 ∈ 𝑈
𝛾 ist also auf (−휀, 휀) definiert.
Es folgt: 𝛾 0 = 𝐹 𝑢0 = 𝐹 𝐹−1(𝑝) = 𝑝
und 𝛾 0 =𝑑
𝑑𝑡𝐹 𝑢0 + 𝑡 ∙ 𝑌
𝑡=0= 𝐷𝑢0
𝐹 𝑌 = 𝑋
Also ist 𝑋 ∈ 𝑇𝑝𝑆.
Differentialgeometrie 3.48 Jürgen Roth
Tangentialebene beschrieben
über lokale Parametrisierung
Beweis zu Satz 3.2.4 (Fortsetzung)
b) Zu zeigen: 𝑇𝑝𝑆 ⊂ Bild 𝐷𝑢0𝐹
Sei 𝑋 ∈ 𝑇𝑝𝑆, dann gilt ∃𝛾: −𝜀,𝜀 →𝑆, glatt 𝛾 0 = 𝑝 ∧ 𝛾 0 = 𝑋
Nachdem man 휀 evtl. verkleinert hat, verläuft 𝛾 ganz in 𝑉.
Nach Satz 3.1.15 ist
𝜑 ≔ 𝐹−1 ∘ 𝛾: −휀, 휀 → 𝑈
eine glatte (ebene) parametrisierte Kurve.
Mit 𝑌 ≔ 𝜑 0 ∈ ℝ2 gilt dann:
𝐷𝑢0𝐹 𝑌 =
𝑑
𝑑𝑡𝐹 ∘ 𝜑
𝑡=0=
𝑑
𝑑𝑡𝐹 ∘ 𝐹−1 ∘ 𝛾
𝑡=0=
𝑑𝛾
𝑑𝑡 𝑡=0
= 𝑋
Also ist 𝑋 ∈ Bild 𝐷𝑢0𝐹 . #
Satz 3.2.5
𝑇𝑝𝑆 ⊂ ℝ3 bildet einen zweidimensionalen Untervektorraum des ℝ3.
Differentialgeometrie 3.49 Jürgen Roth
Tangentialebene
Beweis zu Satz 3.2.5
Die Behauptung folgt direkt aus 𝑇𝑝𝑆 = Bild 𝐷𝑢0𝐹 = 𝐷𝑢0
𝐹(ℝ2)
(Satz 3.2.4) und Rang 𝐷𝑢0𝐹 = 2 (Definition 3.1.2 (2)). #
Bemerkung 3.2.5a Wenn eine reguläre Fläche 𝑆 wie in Satz 3.1.9 als Nullstellenmenge
einer glatten Funktion 𝑓: 𝑉 → ℝ mit 𝑉 ⊂ ℝ3 offen gegeben ist, also
𝑆 ≔ 𝑥, 𝑦, 𝑧 𝑇 ∈ 𝑉 𝑓 𝑥, 𝑦, 𝑧 = 0 , dann kann die Tangentialebene 𝑇𝑝𝑆 von
𝑆 in einem Punkt 𝑝 auch mit Hilfe dieser Funktion 𝑓 bestimmt werden.
Satz 3.2.5b
Sei 𝑉 ⊂ ℝ3 offen, 𝑓: 𝑉 → ℝ eine glatte Funktion und
𝑆 = 𝑓−1 0 ⊂ ℝ3 eine reguläre Fläche. Wenn gilt
∀𝑝∈𝑆 grad 𝑓 𝑝 ≠ 0,
dann steht für 𝑝 ∈ 𝑆 der Gradient von 𝑓 senkrecht
auf der Tangentialebene.
𝑇𝑝𝑆 = grad 𝑓 𝑝 ⊥
Differentialgeometrie 3.50 Jürgen Roth
Tangentialebene
Beweis zu Satz 3.2.5b
Sei 𝑋 ∈ 𝑇𝑝𝑆 und 𝛾 eine glatte parametrisierte Kurve 𝛾: −휀, 휀 → 𝑆 mit
𝛾 0 = 𝑝 und 𝛾 0 = 𝑋. Da 𝛾 in 𝑆 verläuft, gilt:
∀𝑡∈ −𝜀,𝜀 𝑓 ∘ 𝛾 𝑡 = 0
Differenzieren nach 𝑡 liefert:
0 =𝑑
𝑑𝑡𝑓 ∘ 𝛾
𝑡=0
= grad 𝑓 𝛾 0 , 𝛾 (0) = grad 𝑓 𝛾 0 , 𝑋
Da für alle 𝑋 ∈ 𝑇𝑝𝑆 das Skalarprodukt von grad 𝑓 𝛾 0 und 𝑋 gleich Null
ist, stehen alle Vektoren 𝑋 ∈ 𝑇𝑝𝑆 senkrecht auf grad 𝑓 𝑝 , es gilt also
𝑇𝑝𝑆 ⊂ grad 𝑓 𝑝 ⊥.
Da sowohl 𝑇𝑝𝑆 als auch grad 𝑓 𝑝 ⊥
Untervektorräume des ℝ3 sind und
beide die Dimension 2 haben, folgt:
𝑇𝑝𝑆 = grad 𝑓 𝑝 ⊥
Die Tangentialebene 𝑇𝑝𝑆 im Punkt 𝑝 an die reguläre Fläche 𝑆 ist also das
orthogonale Komplement des Gradienten von 𝑓 an der Stelle 𝑝. #
Definition:
Für einen Untervektorraum 𝑉 ⊂ ℝ𝑛
ist das orthogonale Komplement
𝑉⊥ definiert durch:
𝑉⊥ ≔ 𝑥 ∈ ℝ𝑛 ∀𝑦∈𝑉 𝑥, 𝑦 = 0
Differentialgeometrie 3.51 Jürgen Roth
𝑺𝟐
𝒑
𝑻𝒑𝑺𝟐
Tangentialebene
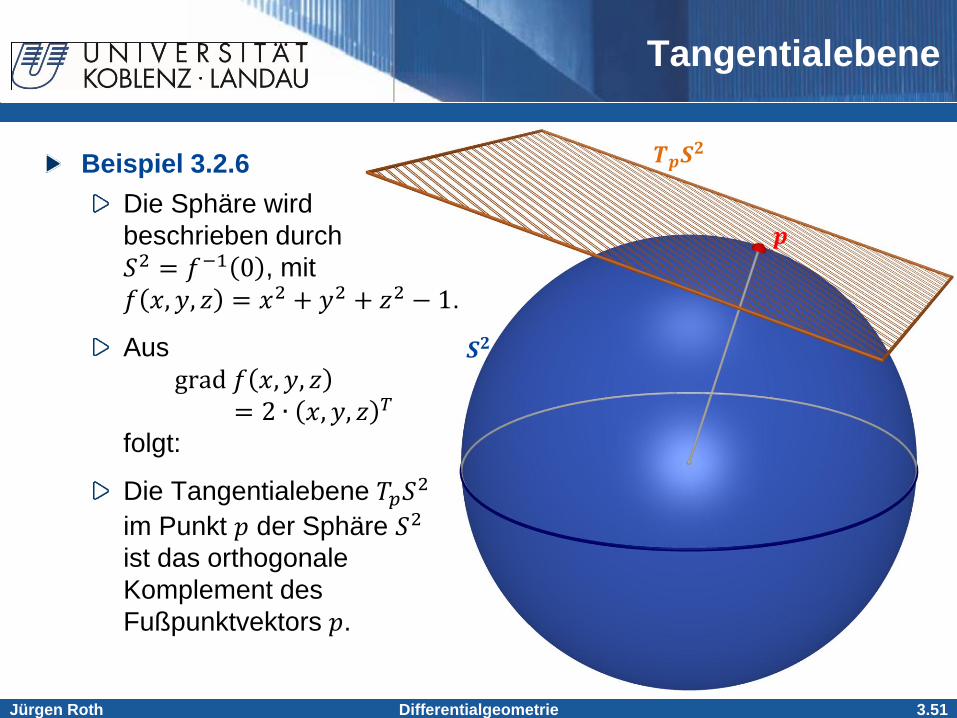
Beispiel 3.2.6
Die Sphäre wird
beschrieben durch
𝑆2 = 𝑓−1 0 , mit
𝑓 𝑥, 𝑦, 𝑧 = 𝑥2 + 𝑦2 + 𝑧2 − 1.
Aus
grad 𝑓 𝑥, 𝑦, 𝑧 = 2 ∙ 𝑥, 𝑦, 𝑧 𝑇
folgt:
Die Tangentialebene 𝑇𝑝𝑆2
im Punkt 𝑝 der Sphäre 𝑆2
ist das orthogonale
Komplement des
Fußpunktvektors 𝑝.
Differentialgeometrie 3.52 Jürgen Roth
Differential 𝒅𝒑𝒇
Bemerkung 3.2.7
Die linearen Approximationen
von glatten Abbildungen die auf offenen Teilmengen
des ℝ𝑛 definiert sind und
von regulären Flächen über ihre Tangentialebenen
lassen sich kombinieren zum Konzept linearer Approximationen
von glatten Abbildungen, die auf regulären Flächen definiert sind.
Die letzte lineare Approximation wird Differential genannt.
Definition 3.2.8
Seien 𝑆1, 𝑆2 ⊂ ℝ3 reguläre Flächen, 𝑓: 𝑆1 → 𝑆2 eine glatte
Abbildung, 𝑝 ∈ 𝑆1 und 𝛾: −휀, 휀 → 𝑆1 eine glatte parametrisierte
Kurve mit 𝛾 0 = 𝑝 und 𝛾 0 = 𝑋, dann heißt die Abbildung
𝑑𝑝𝑓: 𝑇𝑝𝑆1 → 𝑇𝑓 𝑝 𝑆2, 𝑋 ↦ 𝑑𝑝𝑓 𝑋 ≔𝑑
𝑑𝑡𝑓 ∘ 𝛾
𝑡=0∈ 𝑇𝑓 𝑝 𝑆2
das Differential 𝒅𝒑𝒇 von 𝑓 in 𝑝.
Differentialgeometrie 3.53 Jürgen Roth
Differential 𝒅𝒑𝒇
Satz 3.2.9
Das Differential 𝑑𝑝𝑓 ist wohldefiniert, d. h. 𝑑𝑝𝑓(𝑋) hängt nicht
von der speziellen Wahl der Kurve 𝛾 sondern nur von 𝑋 ab.
Das Differential 𝑑𝑝𝑓 ist linear.
Beweis
Zunächst wir 𝑑𝑝𝑓 mit Hilfe von lokalen Parametrisierungen ausgedrückt.
(𝑈1, 𝐹1, 𝑉1) ist eine lokale Parametrisierung von 𝑆1 um 𝑝 und
(𝑈2, 𝐹2, 𝑉2) ist eine lokale Parametrisierung von 𝑆2 um 𝑓(𝑝).
Ggf. nach Verkleinerung von 𝑈1 und 𝑉1 gilt: 𝑓 𝑆 ∩ 𝑉1 ⊂ 𝑉2
Wir definieren:
𝑓 ≔ 𝐹2−1 ∘ 𝑓 ∘ 𝐹1: 𝑈1 → 𝑈2
𝑢0 ≔ 𝐹1−1 𝑝 ∈ 𝑈1
𝛾: −휀, 휀 → 𝑆1 ist glatte param. Kurve mit 𝛾 0 = 𝑝 und 𝛾 0 = 𝑋
𝑢 ≔ 𝐹1−1 ∘ 𝛾: −휀, 휀 → 𝑈1
Differentialgeometrie 3.54 Jürgen Roth
Differential 𝒅𝒑𝒇
Beweis zu Satz 3.2.9 (Fortsetzung)
𝐷𝑢0𝐹1 𝑢 0 =
𝑑
𝑑𝑡𝐹1 ∘ 𝑢
𝑡=0
=𝑑
𝑑𝑡𝐹1 ∘ 𝐹1
−1 ∘ 𝛾 𝑡=0
= 𝛾 0 = 𝑋
Nun kann 𝑑𝑝𝑓 𝑋 berechnet werden:
𝑑𝑝𝑓 𝑋 =𝑑
𝑑𝑡𝑓 ∘ 𝛾
𝑡=0
=𝑑
𝑑𝑡𝐹2 ∘ 𝑓 ∘ 𝑢
𝑡=0
= 𝐷𝑢0(𝐹2 ∘ 𝑓 )(𝑢 0 ) = 𝐷𝑢0
𝐹2 ∘ 𝑓 ∘ 𝐷𝑢0𝐹1
−1(𝑋)
Da der letzte Ausdruck die Kurve 𝛾 nicht mehr enthält, sondern nur
noch 𝑋, ist die Definition unabhängig von der speziellen Wahl von 𝛾.
Weil 𝑑𝑝𝑓 als Verkettung zweier linearer Abbildungen 𝐷𝑢0𝐹2 ∘ 𝑓
und 𝐷𝑢0𝐹1
−1 darstellbar ist, ist die Abbildung 𝑑𝑝𝑓 selbst linear. #
𝑓 ≔ 𝐹2−1 ∘ 𝑓 ∘ 𝐹1: 𝑈1 → 𝑈2
𝑢0 ≔ 𝐹1−1 𝑝 ∈ 𝑈1
𝛾: −휀, 휀 → 𝑆1 ist glatte param.
Kurve mit 𝛾 0 = 𝑝 und 𝛾 0 = 𝑋
𝑢 ≔ 𝐹1−1 ∘ 𝛾: −휀, 휀 → 𝑈1
=𝑑
𝑑𝑡𝑓 ∘ 𝐹1 ∘ 𝑢
𝑡=0
Differentialgeometrie 3.55 Jürgen Roth
Differential 𝒅𝒑𝒇
Bemerkung 3.2.10
Im Beweis zu Satz 3.2.9 wurde
gezeigt, dass das Differential 𝑑𝑝𝑓
mit Hilfe der lokalen Parametrisie-
rungen (𝑈1, 𝐹1, 𝑉1) und 𝑈2, 𝐹2, 𝑉2
durch die Jacobi-Matrix 𝐷𝑢0𝑓
beschrieben werden kann.
Beispiel 3.2.11
𝐴:ℝ3 → ℝ3 ist eine orthogonale lineare Abbildung, d. h. 𝐴 ∈ 𝑂(3).
𝑓: 𝑆2 → 𝑆2, 𝑓 ≔ 𝐴 𝑆2
𝛾: −휀, 휀 → 𝑆2 glatte param. Kurve mit 𝛾 0 = 𝑝 ∧ 𝛾 0 = 𝑋 ∈ 𝑇𝑝𝑆2.
Wegen der Linearität gilt:
𝑑𝑝𝑓 𝑋 ≔𝑑
𝑑𝑡𝑓 ∘ 𝛾
𝑡=0=
𝑑
𝑑𝑡𝐴 ∘ 𝛾
𝑡=0= 𝐴 ∘
𝑑
𝑑𝑡𝛾
𝑡=0= 𝐴 𝛾 0 = 𝐴 𝑋
Also gilt: 𝑑𝑝𝑓 𝑋 = 𝐴 𝑇𝑝𝑆2: 𝑇𝑝𝑆2 → 𝑇𝐴𝑝𝑆2
Differentialgeometrie 3.56 Jürgen Roth
Differential 𝒅𝒑𝒇
Bemerkung 3.2.12
Man kann auch für glatte Abbildungen 𝑓: 𝑆 → ℝ𝑛 (𝑆 ist eine
reguläre Fläche; 𝑝 ∈ 𝑆) das Differential wie folgt definieren:
𝑑𝑝𝑓: 𝑇𝑝𝑆 → ℝ𝑛, 𝑋 ↦ 𝑑𝑝𝑓 𝑋 ≔𝑑
𝑑𝑡𝑓 ∘ 𝛾
𝑡=0
Dabei ist 𝛾: −휀, 휀 → 𝑆 glatte parametrisierte Kurve mit 𝛾 0 = 𝑝
und 𝛾 0 = 𝑋.
Ist der Definitionsbereich eine offene Teilmenge 𝑈 ⊂ ℝ𝑛 und
nimmt 𝑓: 𝑈 → 𝑆 ihre Werte in einer regulären Fläche 𝑆 an, dann
definiert man für 𝑝 ∈ 𝑈 das Differential wie folgt:
𝑑𝑝𝑓:ℝ𝑛 → 𝑇𝑓 𝑝 𝑆 ⊂ ℝ3, 𝑋 ↦ 𝑑𝑝𝑓 𝑋 ≔ 𝐷𝑝𝑓(𝑋)
Man kann zeigen, dass 𝐷𝑝𝑓(𝑋) im Unterraum 𝑇𝑓 𝑝 𝑆 liegt.
In beiden genannten Fällen ist die lineare Abbildung 𝑑𝑝𝑓
wohldefiniert.
Differentialgeometrie 3.57 Jürgen Roth
3.3 Die erste
Fundamentalform
Kapitel 3: Klassische Flächentheorie
Differentialgeometrie 3.58 Jürgen Roth
Erste Fundamentalform
Bemerkung 3.3.1
Um auf einer regulären Fläche 𝑆 ⊂ ℝ3 z. B.
Längen von Kurven die in 𝑆 verlaufen und
Winkel zwischen zwei Tangentialvektoren an die Fläche
messen können, benötigt man ein Skalarprodukt.
Da die Tangentialebene für jeden Punkt 𝑝 ∈ 𝑆 ein zweidimensionaler
Untervektorraum des ℝ3 ist, kann man das Standardskalarprodukt ∙,∙
des ℝ3 einfach auf 𝑇𝑝𝑆 einschränken um das euklidische Skalarprodukt
auf 𝑇𝑝𝑆 zu erhalten.
Definition 3.3.2
Die Abbildung, die jedem Punkt 𝑝 ∈ 𝑆 diese Einschränkung
𝑔𝑝 ≔ ∙,∙ 𝑇𝑝𝑆×𝑇𝑝𝑆 des Standardskalarprodukts zuordnet, heißt
erste Fundamentalform von 𝑆.
Mit 𝑋, 𝑌 ∈ 𝑇𝑝𝑆 schreibt man für die erste Fundamentalform auch:
𝐼𝑝 𝑋, 𝑌 = 𝑔𝑝 𝑋, 𝑌 = 𝑋, 𝑌
Differentialgeometrie 3.59 Jürgen Roth
Erste Fundamentalform
Bemerkung 3.3.3
Aus der linearen Algebra ist bekannt, dass nach der Wahl einer Basis
𝑏1, … , 𝑏𝑛 eines Vektorraums, jedes euklidische Skalarprodukt ∙,∙ auf
diesem Vektorraum durch eine positiv-definite symmetrische Matrix
𝑔𝑖𝑗 𝑖,𝑗=1,…𝑛 dargestellt werden kann.
Die Einträge der Matrix sind die Skalarprodukte der Basisvektoren:
∀𝑖,𝑗=1,…,𝑛 𝑔𝑖𝑗 = 𝑏𝑖 , 𝑏𝑗
Wenn die Vektoren bzgl. der Basis die Darstellung 𝑋 = 𝑥𝑖𝑏𝑖𝑛𝑖=1 und
𝑌 = 𝑦𝑗𝑏𝑗𝑛𝑗=1 besitzen, dann gilt:
𝑋, 𝑌 = 𝑥𝑖𝑏𝑖
𝑛
𝑖=1
, 𝑦𝑗𝑏𝑗
𝑛
𝑗=1
= 𝑥𝑖𝑦𝑗
𝑛
𝑗=1
𝑛
𝑖=1
𝑏𝑖 , 𝑏𝑗 = 𝑥𝑖𝑦𝑗
𝑛
𝑗=1
𝑛
𝑖=1
𝑔𝑖𝑗
Mit 𝑋 = 𝑥1, … , 𝑥𝑛𝑇 und 𝑌 = 𝑦1, … , 𝑦𝑛
𝑇 ergibt sich:
𝑋, 𝑌 = 𝑥𝑖𝑔𝑖𝑗𝑦𝑗
𝑛
𝑗=1
𝑛
𝑖=1
= 𝑥1, … , 𝑥𝑛
𝑔11 ⋯ 𝑔1𝑛
⋮ ⋱ ⋮𝑔𝑛1 ⋯ 𝑔𝑛𝑛
𝑦1
⋮𝑦𝑛
∈ ℝ
Differentialgeometrie 3.60 Jürgen Roth
Erste Fundamentalform
Bemerkung 3.3.3 (Fortsetzung)
Nach der Wahl einer Basis des Vektorraums 𝑇𝑝𝑆 kann das Skalarprodukt
𝑔𝑝 auf 𝑇𝑝𝑆 durch eine positiv-definite symmetrische Matrix 𝐺 dargestellt
werden.
Eine Basis von 𝑇𝑝𝑆 erhält man in der Regel durch eine lokale
Parametrisierung 𝑈, 𝐹, 𝑉 von 𝑆 um 𝑝.
Sind 𝑒1, 𝑒2 die Standardbasisvektoren des ℝ2, dann wird eine Basis von
𝑇𝑝𝑆 von 𝐷𝑢𝐹 𝑒1 =𝜕𝐹
𝜕𝑢1 (𝑢) und 𝐷𝑢𝐹 𝑒2 =𝜕𝐹
𝜕𝑢2 (𝑢), mit 𝑢 = 𝐹−1(𝑝) gebildet.
Bzgl. dieser Basis ist die Matrixdarstellung von 𝑔𝑝 gegeben durch:
𝑔𝑖𝑗 𝑢 ≔ 𝑔𝑝 𝐷𝑢𝐹 𝑒𝑖 , 𝐷𝑢𝐹 𝑒𝑗 =𝜕𝐹
𝜕𝑢𝑖𝑢 ,
𝜕𝐹
𝜕𝑢𝑗(𝑢)
Die 2 × 2-Matrix 𝑔𝑖𝑗 𝑢𝑖,𝑗=1,2
=𝑔11(𝑢) 𝑔12(𝑢)𝑔21(𝑢) 𝑔22(𝑢)
ist also symmetrisch
und positiv definit. Offensichtlich hängen die Matrixeinträge 𝑔𝑖𝑗 glatt von 𝑢
ab, d. h. 𝑔𝑖𝑗: 𝑈 → ℝ ist für jedes 𝑖 und 𝑗 eine glatte Funktion.
∀𝑋∈𝑇𝑝𝑆 𝑋𝑇𝐺𝑋 > 0 𝐺𝑇 = 𝐺
Differentialgeometrie 3.61 Jürgen Roth
Erste Fundamentalform
Beispiel 3.3.4: Ebene
Eine Ebene 𝑆 ⊂ ℝ3 kann durch eine affin-lineare Parametrisierung
mit 𝑝0, 𝑋, 𝑌 ∈ ℝ3 beschrieben werden:
𝐹:ℝ2 → ℝ3, 𝑢1, 𝑢2 ↦ 𝐹 𝑢1, 𝑢2 = 𝑝0 + 𝑢1 ∙ 𝑋 + 𝑢2 ∙ 𝑌
𝑆 ist hier also die von den Vektoren 𝑋 und 𝑌 aufgespannte Ebene
durch den Punkt 𝑝0.
Für die erste Fundamentalform ergibt sich bzgl. dieser
Parametrisierung:
𝑔11 𝑢1, 𝑢2 =𝜕𝐹
𝜕𝑢1 𝑢1, 𝑢2 ,𝜕𝐹
𝜕𝑢1 𝑢1, 𝑢2 = 𝑋, 𝑋
𝑔12 𝑢1, 𝑢2 =𝜕𝐹
𝜕𝑢1 𝑢1, 𝑢2 ,𝜕𝐹
𝜕𝑢2 𝑢1, 𝑢2 = 𝑋, 𝑌
𝑔21 𝑢1, 𝑢2 =𝜕𝐹
𝜕𝑢2 𝑢1, 𝑢2 ,𝜕𝐹
𝜕𝑢1 𝑢1, 𝑢2 = 𝑌, 𝑋
𝑔22 𝑢1, 𝑢2 =𝜕𝐹
𝜕𝑢2 𝑢1, 𝑢2 ,𝜕𝐹
𝜕𝑢2 𝑢1, 𝑢2 = 𝑌, 𝑌
=
Differentialgeometrie 3.62 Jürgen Roth
Erste Fundamentalform
Beispiel 3.3.4: Ebene (Fortsetzung 1)
Wenn 𝑆 die 𝑥-𝑦-Ebene ist und (𝑢1, 𝑢2) kartesische Koordinaten
sind, d. h. 𝑝0 = 0, 𝑋 = 𝑒1 und 𝑌 = 𝑒2, dann wird die erste
Fundamentalform durch folgende Matrix beschrieben:
𝑔𝑖𝑗 𝑢𝑖𝑗
=1 00 1
Die Funktionen 𝑔𝑖𝑗: ℝ2 → ℝ sind in diesem Beispiel konstant.
Benutzt man jedoch eine andere lokale Parametrisierung für
dieselbe Fläche, dann ist das in der Regel nicht mehr so.
Zur Illustration wird die 𝑥-𝑦-Ebene im ℝ3 mit Polarkoordinaten
parametrisiert. Die Polarkoordinaten 𝑢 1, 𝑢 2 = (𝑟, 𝜑) liefern
folgende lokale Parametrisierung:
𝐹 : 0,∞ × 0,2𝜋 → ℝ3, 𝑟, 𝜑 ↦ 𝐹 𝑟, 𝜑 = 𝑟 ∙ cos𝜑 , 𝑟 ∙ sin𝜑 , 0 𝑇
Daraus lässt sich die erste Fundamentalform berechnen:
Differentialgeometrie 3.63 Jürgen Roth
Erste Fundamentalform
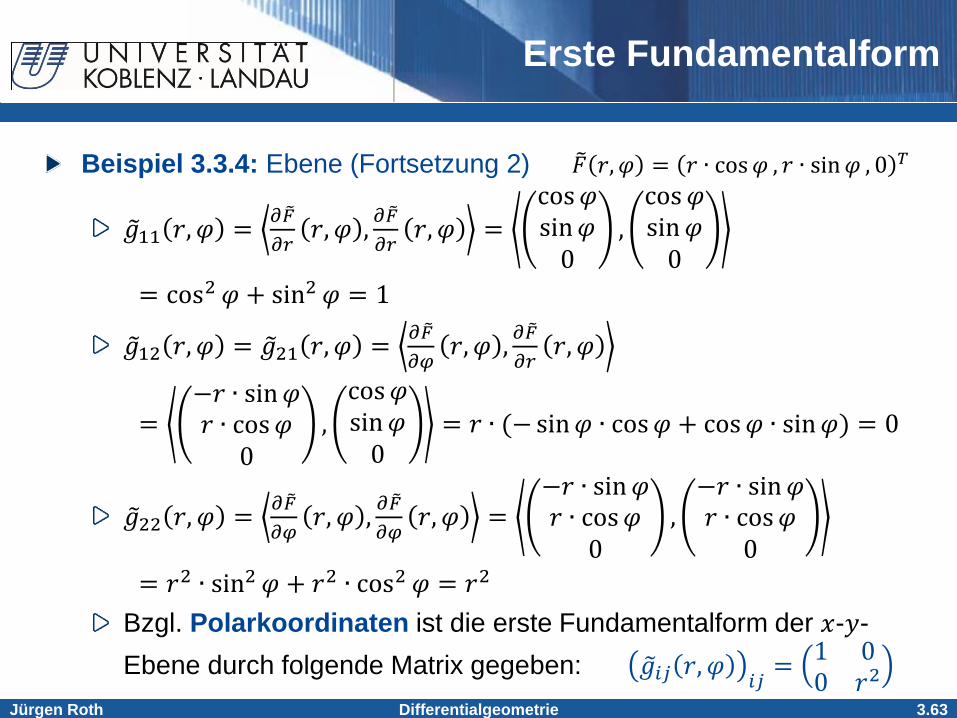
Beispiel 3.3.4: Ebene (Fortsetzung 2) 𝐹 𝑟, 𝜑 = 𝑟 ∙ cos𝜑 , 𝑟 ∙ sin𝜑 , 0 𝑇
𝑔 11 𝑟, 𝜑 =𝜕𝐹
𝜕𝑟𝑟, 𝜑 ,
𝜕𝐹
𝜕𝑟𝑟, 𝜑 =
cos𝜑sin𝜑
0,
cos𝜑sin𝜑
0
= cos2 𝜑 + sin2 𝜑 = 1
𝑔 12 𝑟, 𝜑 = 𝑔 21 𝑟, 𝜑 =𝜕𝐹
𝜕𝜑𝑟, 𝜑 ,
𝜕𝐹
𝜕𝑟𝑟, 𝜑
=−𝑟 ∙ sin𝜑𝑟 ∙ cos𝜑
0,
cos𝜑sin𝜑
0= 𝑟 ∙ (− sin𝜑 ∙ cos𝜑 + cos𝜑 ∙ sin𝜑) = 0
𝑔 22 𝑟, 𝜑 =𝜕𝐹
𝜕𝜑𝑟, 𝜑 ,
𝜕𝐹
𝜕𝜑𝑟, 𝜑 =
−𝑟 ∙ sin𝜑𝑟 ∙ cos𝜑
0,
−𝑟 ∙ sin𝜑𝑟 ∙ cos𝜑
0
= 𝑟2 ∙ sin2 𝜑 + 𝑟2 ∙ cos2 𝜑 = 𝑟2
Bzgl. Polarkoordinaten ist die erste Fundamentalform der 𝑥-𝑦-
Ebene durch folgende Matrix gegeben: 𝑔 𝑖𝑗 𝑟, 𝜑𝑖𝑗
=1 00 𝑟2
Differentialgeometrie 3.64 Jürgen Roth
Erste Fundamentalform
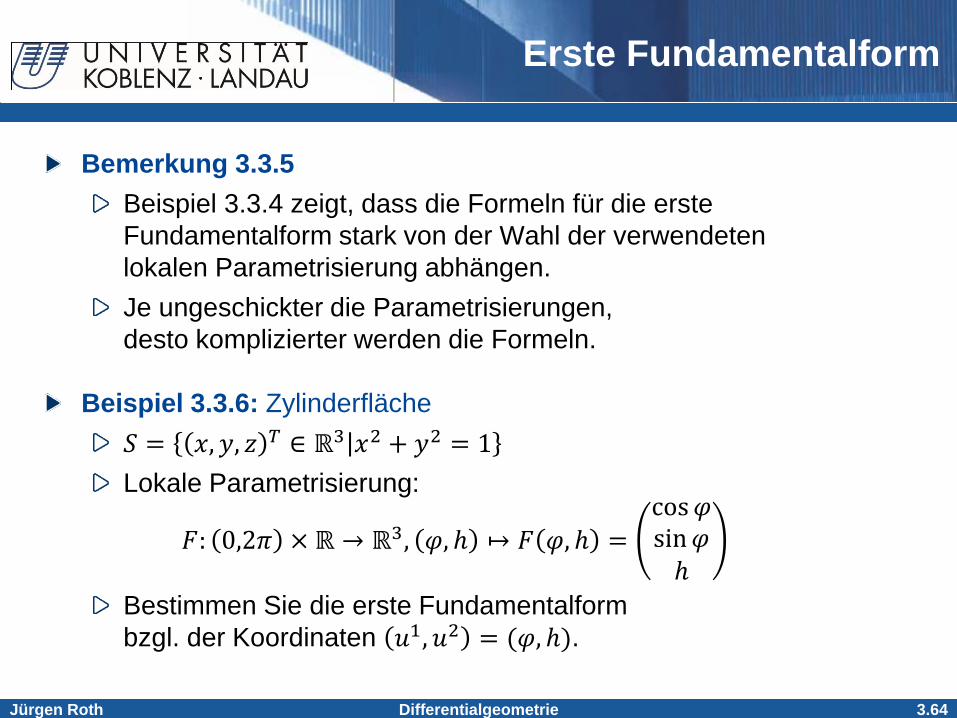
Bemerkung 3.3.5
Beispiel 3.3.4 zeigt, dass die Formeln für die erste
Fundamentalform stark von der Wahl der verwendeten
lokalen Parametrisierung abhängen.
Je ungeschickter die Parametrisierungen,
desto komplizierter werden die Formeln.
Beispiel 3.3.6: Zylinderfläche
𝑆 = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥2 + 𝑦2 = 1
Lokale Parametrisierung:
𝐹: 0,2𝜋 × ℝ → ℝ3, 𝜑, ↦ 𝐹 𝜑, =
cos𝜑sin𝜑
Bestimmen Sie die erste Fundamentalform
bzgl. der Koordinaten 𝑢1, 𝑢2 = (𝜑, ).
Differentialgeometrie 3.65 Jürgen Roth
Erste Fundamentalform
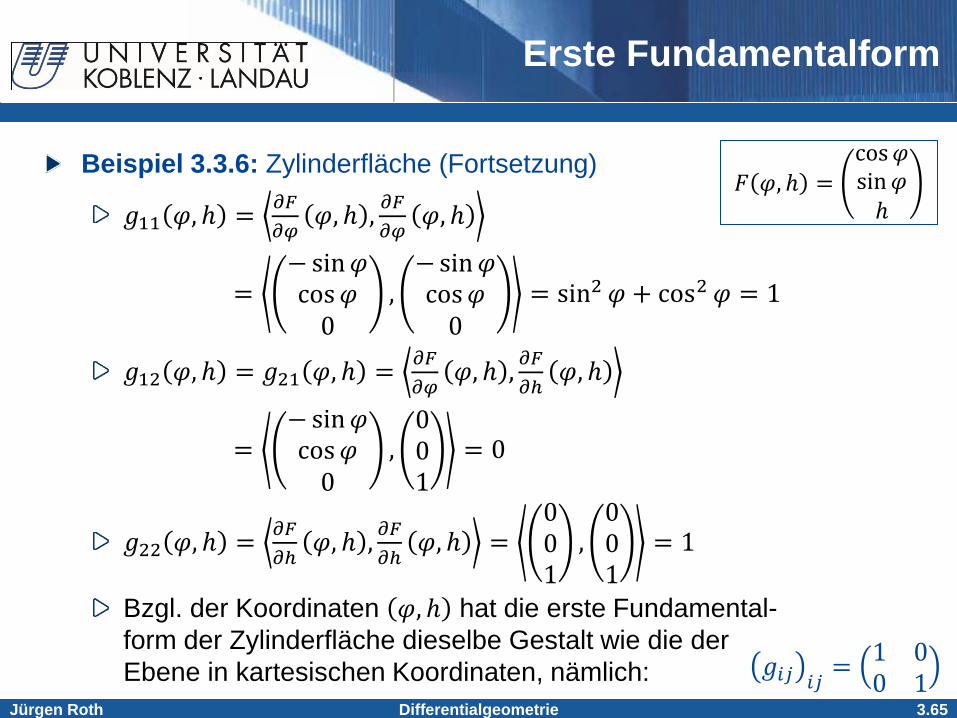
Beispiel 3.3.6: Zylinderfläche (Fortsetzung)
𝑔11 𝜑, =𝜕𝐹
𝜕𝜑𝜑, ,
𝜕𝐹
𝜕𝜑𝜑,
=−sin𝜑cos𝜑
0,
− sin𝜑cos𝜑
0= sin2 𝜑 + cos2 𝜑 = 1
𝑔12 𝜑, = 𝑔21 𝜑, =𝜕𝐹
𝜕𝜑𝜑, ,
𝜕𝐹
𝜕𝜑,
=−sin𝜑cos𝜑
0,
001
= 0
𝑔22 𝜑, =𝜕𝐹
𝜕𝜑, ,
𝜕𝐹
𝜕𝜑, =
001
,001
= 1
Bzgl. der Koordinaten 𝜑, hat die erste Fundamental-
form der Zylinderfläche dieselbe Gestalt wie die der
Ebene in kartesischen Koordinaten, nämlich:
𝐹 𝜑, =
cos𝜑sin𝜑
𝑔𝑖𝑗 𝑖𝑗=
1 00 1
Differentialgeometrie 3.66 Jürgen Roth
Erste Fundamentalform
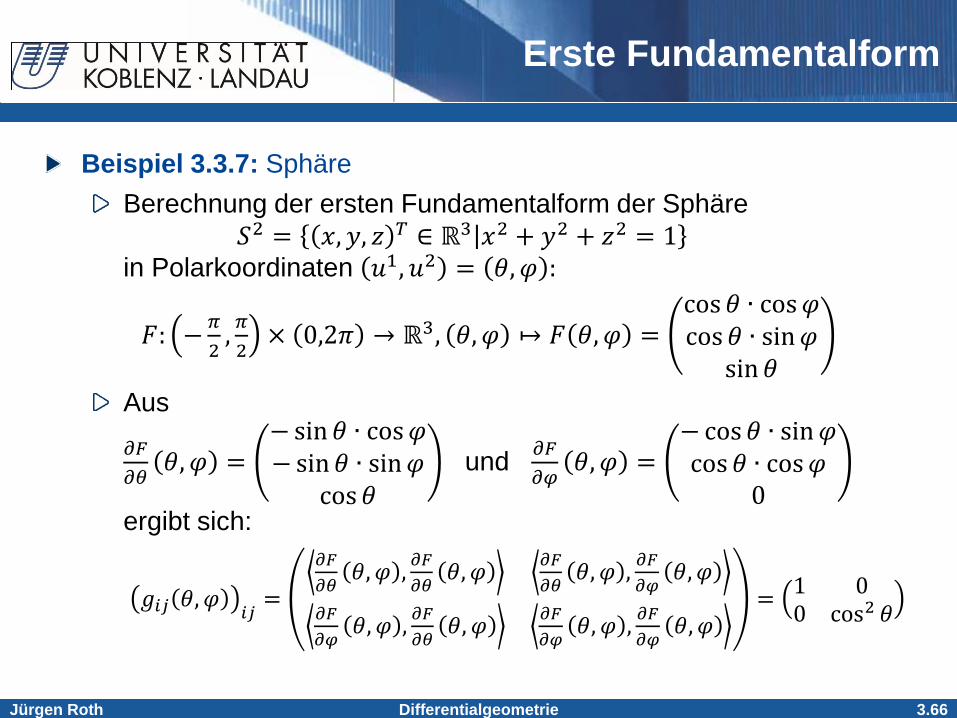
Beispiel 3.3.7: Sphäre
Berechnung der ersten Fundamentalform der Sphäre
𝑆2 = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥2 + 𝑦2 + 𝑧2 = 1
in Polarkoordinaten 𝑢1, 𝑢2 = 𝜃, 𝜑 :
𝐹: −𝜋
2,𝜋
2× 0,2𝜋 → ℝ3, 𝜃, 𝜑 ↦ 𝐹 𝜃, 𝜑 =
cos 𝜃 ∙ cos𝜑cos 𝜃 ∙ sin𝜑
sin 𝜃
Aus
𝜕𝐹
𝜕𝜃𝜃, 𝜑 =
− sin 𝜃 ∙ cos𝜑− sin 𝜃 ∙ sin𝜑
cos 𝜃
und 𝜕𝐹
𝜕𝜑𝜃, 𝜑 =
− cos 𝜃 ∙ sin𝜑cos 𝜃 ∙ cos𝜑
0
ergibt sich:
𝑔𝑖𝑗 𝜃, 𝜑𝑖𝑗
=
𝜕𝐹
𝜕𝜃𝜃, 𝜑 ,
𝜕𝐹
𝜕𝜃𝜃, 𝜑
𝜕𝐹
𝜕𝜃𝜃, 𝜑 ,
𝜕𝐹
𝜕𝜑𝜃, 𝜑
𝜕𝐹
𝜕𝜑𝜃, 𝜑 ,
𝜕𝐹
𝜕𝜃𝜃, 𝜑
𝜕𝐹
𝜕𝜑𝜃, 𝜑 ,
𝜕𝐹
𝜕𝜑𝜃, 𝜑
=1 00 cos2 𝜃
Differentialgeometrie 3.67 Jürgen Roth
Erste Fundamentalform
Bemerkung 3.3.8: Änderung der lokalen Parametrisierung
Was passiert mit der ersten Fundamentalform wenn man
die lokale Parametrisierung der regulären Fläche 𝑆 ändert?
Neben 𝑈, 𝐹, 𝑉 sei 𝑈 , 𝐹 , 𝑉 eine weitere lokale Parametrisierung von 𝑆
und 𝑔 𝑖𝑗 𝑖𝑗 die zugehörige Matrix, die die erste Fundamentalform
beschreibt. Wenn 𝜑 ≔ 𝐹 −1 ∘ 𝐹 die Parametertransformation zwischen
diesen beiden Parametrisierungen beschreibt, dann ergibt sich mit Hilfe
der Kettenregel:
𝑔𝑖𝑗 𝑢 =𝜕𝐹
𝜕𝑢𝑖 𝑢 ,𝜕𝐹
𝜕𝑢𝑗 𝑢 = 𝐼𝜕𝐹
𝜕𝑢𝑖 𝑢 ,𝜕𝐹
𝜕𝑢𝑗 𝑢 = 𝐼𝜕(𝐹 ∘𝜑)
𝜕𝑢𝑖 𝑢 ,𝜕(𝐹 ∘𝜑)
𝜕𝑢𝑗 𝑢
= 𝐼 𝜕𝐹
𝜕𝑢 𝑘 𝜑 𝑢 ∙𝜕𝜑𝑘
𝜕𝑢𝑖 𝑢𝑘 , 𝜕𝐹
𝜕𝑢 𝑙 𝜑 𝑢 ∙𝜕𝜑𝑙
𝜕𝑢𝑖 𝑢𝑙
= 𝜕𝜑𝑘
𝜕𝑢𝑖 𝑢𝑘𝑙𝜕𝜑𝑙
𝜕𝑢𝑖 𝑢 ∙ 𝐼𝜕𝐹
𝜕𝑢 𝑘 𝜑 𝑢 ,𝜕𝐹
𝜕𝑢 𝑙 𝜑 𝑢
= 𝜕𝜑𝑘
𝜕𝑢𝑖 𝑢𝑘𝑙𝜕𝜑𝑙
𝜕𝑢𝑖 𝑢 ∙ 𝑔 𝑘𝑙(𝜑 𝑢 )
In Matrizenschreibweise ergibt sich: 𝑔𝑖𝑗 𝑢𝑖𝑗
= 𝐷𝑢𝜑 𝑇 ∙ 𝑔 𝑘𝑙 𝜑 𝑢𝑘𝑙
∙ 𝐷𝑢𝜑
Differentialgeometrie 3.68 Jürgen Roth
Erste Fundamentalform
Aufgabe 3.3.9
Berechnen Sie die erste Fundamentalform der Sphäre bzgl. der
lokalen Parametrisierung (𝑈, 𝐹3+, 𝑉3
+) (vgl. Beispiel 3.1.7) mit
𝐹3+ 𝑥, 𝑦 = 𝑥, 𝑦, 1 − 𝑥2 + 𝑦2
𝑇.
Aufgabe 3.3.10
Berechnen Sie die erste Fundamentalform eines
Funktionsgraphen der glatten Funktion 𝑓: 𝑈 ⊂ ℝ2 → ℝ bzgl. der
Parametrisierung 𝐹:𝑈 ⊂ ℝ2 → ℝ3, 𝑥, 𝑦 𝑇 ↦ 𝑥, 𝑦, 𝑓 𝑥, 𝑦𝑇.
Aufgabe 3.3.11
Berechnen Sie die erste Fundamentalform des Kegels
𝑆 = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑥2 + 𝑦2 = 𝑧2 ∧ 𝑧 > 0
bzgl. folgender Parametrisierung:
𝐹: 0,2𝜋 × 0,∞ → ℝ3, 𝐹 𝜑, 𝑟 = 𝑟 ∙cos𝜑sin𝜑
1
Lösungshinweise:
Bär (2010, S. 299)
Differentialgeometrie 3.69 Jürgen Roth
3.4 Normalenfelder und
Orientierbarkeit
Kapitel 3: Klassische Flächentheorie
Differentialgeometrie 3.70 Jürgen Roth
Normalenfeld
Definition 3.4.1
Ein Normalenfeld 𝑁 auf einer regulären Fläche 𝑆 ⊂ ℝ3
ist eine Abbildung 𝑁: 𝑆 → ℝ3 mit folgender Eigenschaft:
∀𝑝∈𝑆 𝑁 𝑝 ⊥ 𝑇𝑝𝑆 ⇔ ∀𝑝∈𝑆 ∀𝑋∈𝑇𝑝𝑆 𝑁 𝑝 , 𝑋 = 0
Ein Normalenfeld auf 𝑆 heißt Einheitsnormalenfeld,
wenn zusätzlich gilt:
∀𝑝∈𝑆 𝑁(𝑝) = 1
Bemerkung 3.4.2
Mit 𝑁 ist auch −𝑁 ein (Einheits-)Normalenfeld auf 𝑆.
Stetige Einheitsnormalenfelder kann, muss es aber
auf einer regulären Fläche nicht geben.
Beispiel 3.4.3: Ebene
Für die 𝑥-𝑦-Ebene 𝑆 = 𝑥, 𝑦, 0 𝑇 ∈ ℝ3 𝑥, 𝑦 ∈ ℝ
ist 𝑁 𝑥, 𝑦, 0 = 0,0,1 𝑇 ein konstantes Einheits-
normalenfeld auf S.
Differentialgeometrie 3.71 Jürgen Roth
Normalenfeld
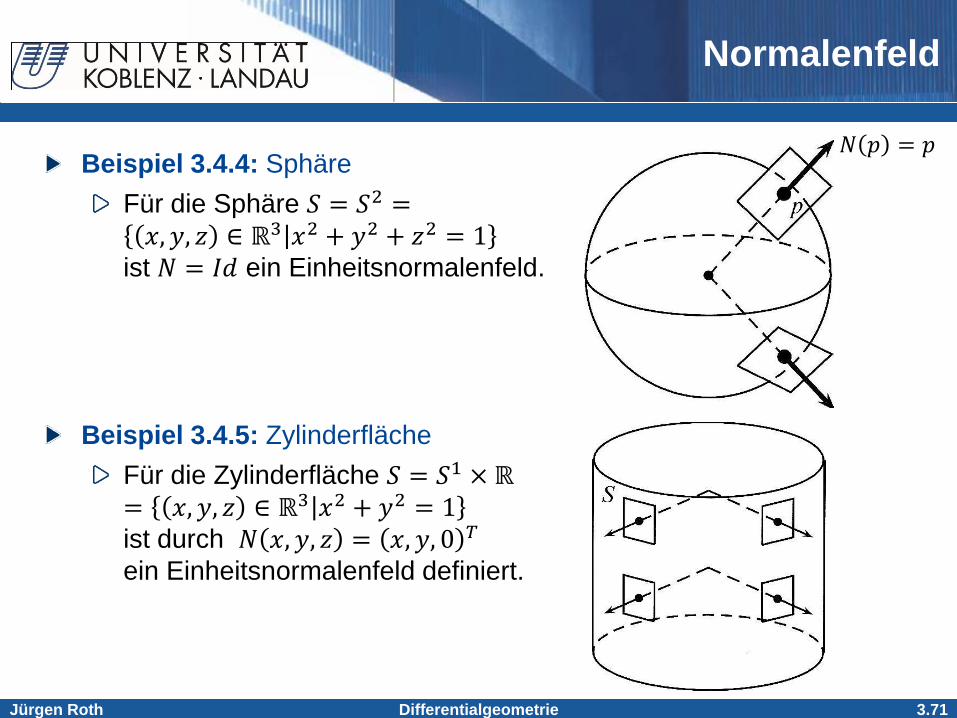
Beispiel 3.4.4: Sphäre
Für die Sphäre 𝑆 = 𝑆2 = 𝑥, 𝑦, 𝑧 ∈ ℝ3 𝑥2 + 𝑦2 + 𝑧2 = 1
ist 𝑁 = 𝐼𝑑 ein Einheitsnormalenfeld.
Beispiel 3.4.5: Zylinderfläche
Für die Zylinderfläche 𝑆 = 𝑆1 × ℝ = 𝑥, 𝑦, 𝑧 ∈ ℝ3 𝑥2 + 𝑦2 = 1
ist durch 𝑁 𝑥, 𝑦, 𝑧 = 𝑥, 𝑦, 0 𝑇
ein Einheitsnormalenfeld definiert.
𝑁 𝑝 = 𝑝
Differentialgeometrie 3.72 Jürgen Roth
Orientierbarkeit
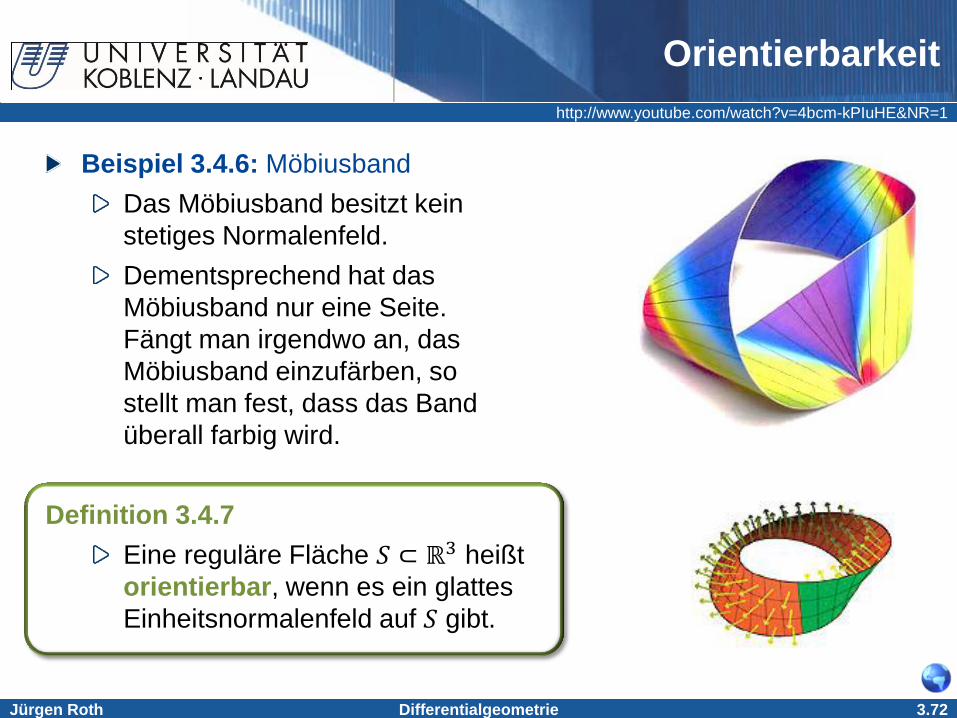
Beispiel 3.4.6: Möbiusband
Das Möbiusband besitzt kein
stetiges Normalenfeld.
Dementsprechend hat das
Möbiusband nur eine Seite.
Fängt man irgendwo an, das
Möbiusband einzufärben, so
stellt man fest, dass das Band
überall farbig wird.
Definition 3.4.7
Eine reguläre Fläche 𝑆 ⊂ ℝ3 heißt
orientierbar, wenn es ein glattes
Einheitsnormalenfeld auf 𝑆 gibt.
http://www.youtube.com/watch?v=4bcm-kPIuHE&NR=1
Differentialgeometrie 3.73 Jürgen Roth
Orientierbarkeit
Bemerkung 3.4.8
Die Ebene, die Sphäre und der Zylinder sind orientierbar,
während das Möbiusband nicht orientierbar ist.
Die wesentliche Bedingung in der Definition 3.4.7 der
Orientierbarkeit besteht darin, dass das Einheitsnormalenfeld
glatt ist.
Irgendein Einheitsnormalenfeld kann man immer finden.
Man muss nur in jedem Punkt 𝑝 einer regulären Fläche 𝑆
einen der beiden Einheitsnormalenvektoren zu 𝑇𝑝𝑆 ⊂ ℝ3
auswählen und ihn mit 𝑁(𝑝) bezeichnen.
In der Regel wird dieses 𝑁 aber nicht stetig, geschweige
denn glatt sein.
Man kann sogar die Bedingung glatt in der Definition durch
stetig ersetzen, ohne am Konzept der Orientierbarkeit etwas
zu verändern.
Differentialgeometrie 3.74 Jürgen Roth
Orientierbarkeit
Bemerkung 3.4.9
Für das Einheitsnormalenfeld 𝑁: 𝑆 → S2 ⊂ ℝ3 einer regulären
Fläche 𝑆 ⊂ ℝ2 gilt: 𝑁 ist genau dann stetig, wenn 𝑁 glatt ist.
Begründung:
Wenn 𝑈, 𝐹, 𝑉 eine lokale Parametrisierung von 𝑆 ist, dann ist
𝑁 ≔
𝜕𝐹
𝜕𝑥×
𝜕𝐹
𝜕𝑦
𝜕𝐹
𝜕𝑥×
𝜕𝐹
𝜕𝑦
ein glattes Einheitsnormalenfeld auf 𝑆 ∩ 𝑉.
Damit ist 𝑁 = 𝑓 ∙ 𝑁 mit einer Funktion 𝑓: 𝑆 ∩ V → *−1,1+.
Eine solche Funktion 𝑓 ist genau dann stetig, wenn sie lokal
konstant ist, also genau dann, wenn sie glatt ist.
Differentialgeometrie 3.75 Jürgen Roth
Orientierbarkeit
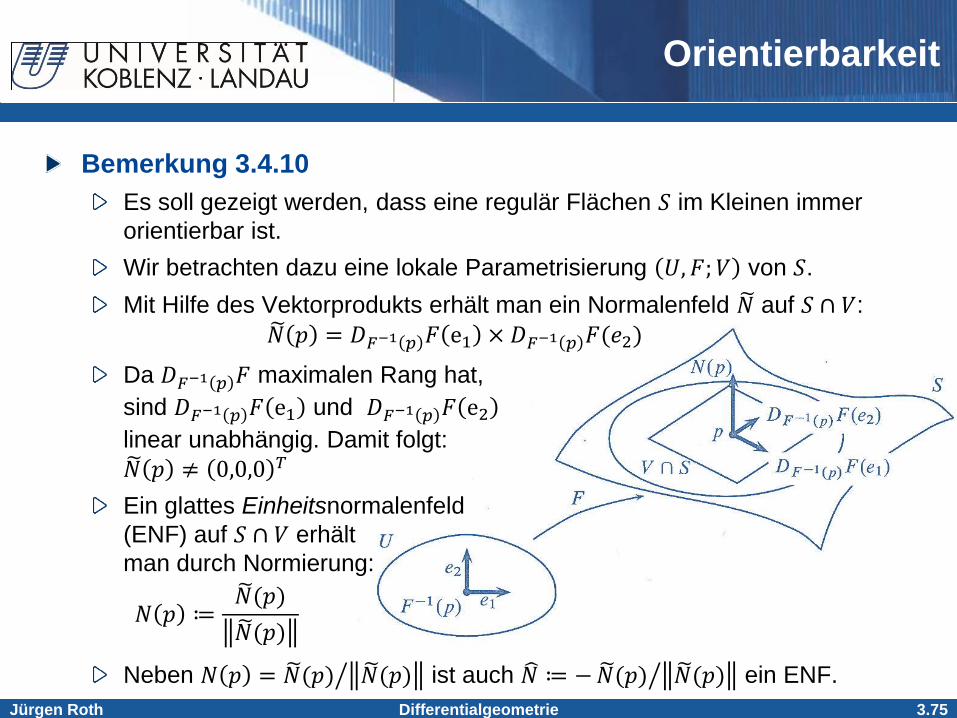
Bemerkung 3.4.10
Es soll gezeigt werden, dass eine regulär Flächen 𝑆 im Kleinen immer
orientierbar ist.
Wir betrachten dazu eine lokale Parametrisierung 𝑈, 𝐹; 𝑉 von 𝑆.
Mit Hilfe des Vektorprodukts erhält man ein Normalenfeld 𝑁 auf 𝑆 ∩ 𝑉:
𝑁 𝑝 = 𝐷𝐹−1 𝑝 𝐹 e1 × 𝐷𝐹−1 𝑝 𝐹(𝑒2)
Da 𝐷𝐹−1 𝑝 𝐹 maximalen Rang hat,
sind 𝐷𝐹−1 𝑝 𝐹 e1 und 𝐷𝐹−1 𝑝 𝐹 e2
linear unabhängig. Damit folgt:
𝑁 𝑝 ≠ 0,0,0 𝑇
Ein glattes Einheitsnormalenfeld
(ENF) auf 𝑆 ∩ 𝑉 erhält
man durch Normierung:
Neben 𝑁 𝑝 = 𝑁 (𝑝) 𝑁 (𝑝) ist auch 𝑁 ≔ −𝑁 (𝑝) 𝑁 (𝑝) ein ENF.
𝑁 𝑝 ≔𝑁 (𝑝)
𝑁 (𝑝)
Differentialgeometrie 3.76 Jürgen Roth
Orientierbarkeit
Bemerkung 3.4.10 (Fortsetzung 1)
Führt man diese Konstruktion des Einheitsnormalenfeldes für zwei lokale
Parametrisierungen 𝑈1, 𝐹1, 𝑉1 und 𝑈2, 𝐹2, 𝑉2 durch, dann können die
zugehörigen Einheitsnormalenvektoren 𝑁1 𝑝 und 𝑁2 𝑝 in einem Punkt
𝑝 ∈ 𝑆 ∩ 𝑉1 ∩ 𝑉2 entweder
übereinstimmen 𝑁1 𝑝 = 𝑁2 𝑝 oder
entgegengesetzt orientiert sein 𝑁1 𝑝 = −𝑁2 𝑝 .
Dieser Zusammenhang lässt sich über eine Bedingung an die zugehörige
Parametertransformation 𝜑 ≔ 𝐹2−1 ∘ 𝐹1 ausdrücken.
Wir betrachten 𝑝 ∈ 𝑆 ∩ 𝑉1 ∩ 𝑉2 sowie ∀𝑖=1,2 𝑢𝑖 ≔ 𝐹𝑖−1 𝑝 und für alle
𝑖 = 1,2 den zu 𝑈𝑖 , 𝐹𝑖 , 𝑉𝑖 gehörigen Einheitsnormalenvektor 𝑁𝑖(𝑝) in 𝑝.
Nach Konstruktion bilden (𝐷𝑢𝑖𝐹𝑖 𝑒1 , 𝐷𝑢𝑖
𝐹𝑖 𝑒2 , 𝑁𝑖 𝑝 ) für 𝑖 = 1,2 jeweils
eine positiv orientierte Basis des ℝ3.
𝑁1 𝑝 und 𝑁2 𝑝 stimmen also genau dann überein, wenn
𝐷𝑢1𝐹1 𝑒1 , 𝐷𝑢1
𝐹1 𝑒2 und 𝐷𝑢2𝐹2 𝑒1 , 𝐷𝑢2
𝐹2 𝑒2 auf 𝑇𝑝𝑆
gleich orientiert sind. Andernfalls gilt 𝑁1 𝑝 = −𝑁2 𝑝 .
Differentialgeometrie 3.77 Jürgen Roth
Orientierbarkeit
Bemerkung 3.4.10 (Fortsetzung 2)
Folglich gilt 𝑁1 𝑝 = 𝑁2 𝑝 genau dann, wenn 𝜑 in 𝑢1
orientierungserhaltend ist, d. h. wenn det 𝐷𝑢1𝜑 > 0.
Zusammenfassung:
𝑁1 𝑝 = 𝑁2 𝑝 ⇔ det 𝐷𝑢1𝜑 > 0
𝑁1 𝑝 = −𝑁2 𝑝 ⇔ det 𝐷𝑢1𝜑 < 0
Daraus folgt direkt:
Satz 3.4.11
Eine reguläre Fläche 𝑆 ⊂ ℝ3 ist genau dann orientierbar, wenn 𝑆
so durch lokale Parametrisierungen überdeckt werden kann, dass
für alle Parametertransformationen 𝜑 gilt:
det 𝐷𝜑 > 0
Differentialgeometrie 3.78 Jürgen Roth
3.5 Die zweite
Fundamentalform
Kapitel 3: Klassische Flächentheorie
Differentialgeometrie 3.79 Jürgen Roth
Weingarten-Abbildung
Bezeichnung 3.5.1
Das glatte Einheitsnormalenfeld 𝑁 einer orientierbaren regulären
Fläche 𝑆 ⊂ ℝ3 interpretiert als Abbildung 𝑁: 𝑆 → 𝑆2 zwischen
regulären Flächen wird auch Gauß-Abbildung genannt.
Bemerkung 3.5.2
𝑑𝑝𝑁:𝑇𝑝𝑆 → 𝑇𝑁 𝑝 𝑆2 ist das Differential von 𝑁: 𝑆 → 𝑆2 in 𝑝 ∈ S.
Wegen 𝑇𝑁 𝑝 𝑆2 = 𝑁 𝑝 ⊥ = 𝑇𝑝𝑆 ist
𝑑𝑝𝑁 ein Endomorphismus von 𝑇𝑝𝑆.
Definition 3.5.3
Wenn 𝑆 ⊂ ℝ3 eine reguläre Fläche mit einer durch das
Einheitsnormalenfeld 𝑁 gegebenen Orientierung ist, dann wird
folgender Endomorphismus Weingarten-Abbildung genannt:
𝑊𝑝: 𝑇𝑝𝑆 → 𝑇𝑝𝑆, 𝑋 ↦ 𝑊𝑝 𝑋 = −𝑑𝑝𝑁(𝑋)
Ein Endomorphismus ist eine
strukturerhaltende Abbildung 𝑓: 𝐴 → 𝐴
einer Struktur 𝐴 in sich selbst.
Differentialgeometrie 3.80 Jürgen Roth
Weingarten-Abbildung
Bemerkung 3.5.4
Das negative Vorzeichen in Definition 3.5.3 hat historische
Gründe.
Bei der Umkehrung der Orientierung, d. h. beim Ersetzen
von 𝑁 durch −𝑁, ändert auch die Weingarten-Abbildung 𝑊
ihr Vorzeichen.
Beispiel 3.5.5: Sphäre
Die zur Sphäre 𝑆 = 𝑆2 und ihrem äußeren Einheitsnormalenfeld
𝑁: 𝑆 → ℝ3, 𝑝 ↦ 𝑁 𝑝 = 𝑝 gehörige Weingarten-Abbildung ist:
𝑊𝑝 = −𝐼𝑑: 𝑇𝑝𝑆2 → 𝑇𝑝𝑆2, 𝑋 ↦ 𝑊𝑝 𝑋 = −𝑋
Beispiel 3.5.6: 𝑥-𝑦-Ebene
Die zur 𝑥-𝑦-Ebene 𝑆 = 𝑥, 𝑦, 0 𝑇 ∈ ℝ3 𝑥, 𝑦 ∈ ℝ und ihrem
Einheitsnormalenfeld 𝑁: 𝑆 → ℝ3, 𝑥, 𝑦, 𝑧 𝑇 ↦ 𝑁 𝑥, 𝑦, 𝑧 = 0,0,1 𝑇
gehörige Weingarten-Abbildung ist: 𝑊𝑝: 𝑇𝑝𝑆 → 𝑇𝑝𝑆, 𝑋 ↦ 𝑊𝑝 𝑋 = 0
Differentialgeometrie 3.81 Jürgen Roth
Weingarten-Abbildung
Beispiel 3.5.7: Zylinder
Wir betrachten den Zylinder 𝑆 = 𝑆1 × ℝ und das zugehörige
Einheitsnormalenfeld 𝑁 𝑥, 𝑦, 𝑧 = 𝑥, 𝑦, 0 𝑇.
In jedem Punkt 𝑝 = 𝑥, 𝑦, 𝑧 𝑇 ∈ 𝑆 wird die Tangentialebene 𝑇𝑝𝑆
durch die Vektoren −𝑦, 𝑥, 0 𝑇 und 0,0,1 𝑇 aufgespannt.
Zum Bestimmen von 𝑊𝑝( 0,0,1 𝑇) wird 𝛾 𝑡 ≔ 𝑝 + 𝑡 ∙ 𝑋 gewählt.
𝑊𝑝
001
= −𝑑𝑝𝑁001
= −𝑑
𝑑𝑡𝑁 ∘ 𝛾
𝑡=0 = −
𝑑
𝑑𝑡𝑁 ∘
𝑥𝑦𝑧
+ 𝑡 ∙001
𝑡=0
= −𝑑
𝑑𝑡𝑁
𝑥𝑦
𝑧 + 𝑡
𝑡=0
= −𝑑
𝑑𝑡
𝑥𝑦0
𝑡=0
=000
𝑡=0
=000
Differentialgeometrie 3.82 Jürgen Roth
Weingarten-Abbildung
Beispiel 3.5.7: Zylinder (Fortsetzung)
Zum Bestimmen von 𝑊𝑝( −𝑦, 𝑥, 0 𝑇) wird 𝑡0 ∈ ℝ so gewählt,
dass cos 𝑡0 , sin 𝑡0 = (𝑥, 𝑦).
Dann gilt für 𝛾 𝑡 ≔ cos 𝑡 + 𝑡0 , sin 𝑡 + 𝑡0 , 𝑧 𝑇:
𝛾 0 = 𝑥, 𝑦, 𝑧 𝑇 = 𝑝 ∧ 𝛾 0 = −sin 𝑡0 , cos 𝑡0 , 0 𝑇 und damit:
In der Basis −𝑦, 𝑥, 0 𝑇 und 0,0,1 𝑇 hat 𝑊𝑝 die Matrixdarstellung
−1 00 0
.
𝑊𝑝
−𝑦𝑥0
= −𝑑𝑝𝑁−𝑦𝑥0
= −𝑑
𝑑𝑡𝑁 ∘ 𝛾
𝑡=0 = −
𝑑
𝑑𝑡𝑁
cos 𝑡 + 𝑡0sin 𝑡 + 𝑡0
𝑧
𝑡=0
= −𝑑
𝑑𝑡
cos 𝑡 + 𝑡0sin 𝑡 + 𝑡0
0
𝑡=0
= −−sin 𝑡 + 𝑡0cos 𝑡 + 𝑡0
0
𝑡=0
=sin(𝑡0)
−cos (𝑡0)0
𝑡=0
= −−𝑦𝑥0
Differentialgeometrie 3.83 Jürgen Roth
𝑾𝒑 ist selbstadjungiert bzgl. 𝑰𝒑
Satz 3.5.8
Für eine orientierbare reguläre Fläche 𝑆 ⊂ ℝ3 mit Weingarten-
Abbildung 𝑊𝑝: 𝑇𝑝𝑆 → 𝑇𝑝𝑆 und 𝑝 ∈ 𝑆 gilt:
𝑊𝑝 ist selbstadjungiert, bzgl. der ersten Fundamentalform 𝐼𝑝, d. h.
𝐼𝑝 𝑋,𝑊𝑝(𝑌) = 𝐼𝑝 𝑊𝑝 𝑋 , 𝑌
Beweis
𝑁 ist das Einheitsnormalenfeld von 𝑆, das zur
Weingarten-Abbildung 𝑊𝑝 = −𝑑𝑝𝑁 führt,
(𝑈, 𝐹, 𝑉) eine lokale Parametrisierung um 𝑝,
𝑢 ≔ 𝐹−1(𝑝) ,
𝑋1 ≔ 𝐷𝑢𝐹 𝑒1 =𝜕𝐹
𝜕𝑢1 𝑢 ∧ 𝑋2 ≔ 𝐷𝑢𝐹 𝑒2 =𝜕𝐹
𝜕𝑢2 𝑢 die zugehörigen
Basisvektoren von 𝑇𝑝𝑆.
Wegen ∀𝑝∈𝑆 𝑁(𝑝) ⊥ 𝑇𝑝𝑆 gilt: 𝜕𝐹
𝜕𝑢𝑖 𝑢 + 𝑡 ∙ 𝑒𝑗 , 𝑁 𝐹 𝑢 + 𝑡 ∙ 𝑒𝑗 ≡ 0 (*)
Differentialgeometrie 3.84 Jürgen Roth
𝑾𝒑 ist selbstadjungiert bzgl. 𝑰𝒑
Beweis zu Satz 3.5.8 (Fortsetzung)
Differentiation der Gleichung (*) liefert:
0 =𝑑
𝑑𝑡
𝜕𝐹
𝜕𝑢𝑖 𝑢 + 𝑡 ∙ 𝑒𝑗 , 𝑁 𝐹 𝑢 + 𝑡 ∙ 𝑒𝑗 𝑡=0
Also gilt:
Nach dem Satz von Schwarz (3.0.8) folgt:
Für die Basisvektoren 𝑋1 und 𝑋2 von 𝑇𝑝𝑆 gilt also:
Wegen der Bilinearität von 𝐼 und der Linearität von 𝑊𝑝folgt daraus direkt:
=𝑑
𝑑𝑡
𝜕𝐹
𝜕𝑢𝑖 𝑢 + 𝑡 ∙ 𝑒𝑗 𝑡=0
, 𝑁(𝑝) +𝜕𝐹
𝜕𝑢𝑖 𝑢 , 𝑑𝑝𝑁 ∘ 𝐷𝑢𝐹(𝑒𝑗)
=𝜕2𝐹
𝜕𝑢𝑗𝜕𝑢𝑖 𝑢 , 𝑁(𝑝) + 𝑋𝑖 , −𝑊𝑝(𝑋𝑗)
𝐼𝑝 𝑋𝑖 ,𝑊𝑝 𝑋𝑗 = 𝑋𝑖 ,𝑊𝑝(𝑋𝑗) =𝜕2𝐹
𝜕𝑢𝑗𝜕𝑢𝑖 𝑢 , 𝑁(𝑝)
𝐼𝑝 𝑋𝑖 ,𝑊𝑝 𝑋𝑗 =𝜕2𝐹
𝜕𝑢𝑗𝜕𝑢𝑖𝑢 , 𝑁(𝑝) =
𝜕2𝐹
𝜕𝑢𝑖𝜕𝑢𝑗𝑢 , 𝑁(𝑝) = 𝐼𝑝 𝑋𝑗 ,𝑊𝑝 𝑋𝑖
𝐼𝑝 𝑋𝑖 ,𝑊𝑝 𝑋𝑗 = 𝐼𝑝 𝑋𝑗 ,𝑊𝑝 𝑋𝑖 = 𝐼𝑝 𝑊𝑝 𝑋𝑖 , 𝑋𝑗
∀𝑋,𝑌∈𝑇𝑝𝑆 𝐼𝑝 𝑋,𝑊𝑝 𝑌 = 𝐼𝑝 𝑊𝑝 𝑋 , 𝑌 , also ist 𝑊𝑝 selbstadjungiert bzgl. 𝐼. #
(**)
Differentialgeometrie 3.85 Jürgen Roth
Zweite Fundamentalform
Definition 3.5.9
Die zur Weingarten-Abbildung 𝑊𝑝 gehörige Bilinearform heißt
zweite Fundamentalform der regulären Fläche 𝑆 im Punkt 𝑝:
𝐼𝐼𝑝 𝑋, 𝑌 = 𝐼𝑝 𝑊𝑝 𝑋 , 𝑌 mit 𝑋, 𝑌 ∈ 𝑇𝑝𝑆
Bemerkung 3.5.10
Häufig wird der Fußpunkt 𝑝 in der Schreibweise weggelassen und
an Stelle von 𝐼𝐼𝑝 einfach 𝐼𝐼 und statt 𝑊𝑝 einfach 𝑊 geschrieben.
Bemerkung 3.5.11: Ausdruck in lokalen Koordinaten
Seien 𝑆 ⊂ ℝ3, 𝑝 ∈ 𝑆, (𝑈, 𝐹, 𝑉) eine lokale Parametrisierung von 𝑆
um 𝑝 und 𝑢 ≔ 𝐹−1(𝑝).
In der Basis 𝐷𝑢𝐹 𝑒1 =𝜕𝐹
𝜕𝑢1 (𝑢) und 𝐷𝑢𝐹 𝑒2 =𝜕𝐹
𝜕𝑢2 (𝑢) wird die erste
Fundamentalform durch die symmetrische Matrix 𝑔𝑖𝑗 𝑢𝑖,𝑗=1,2
beschrieben mit:
𝑔𝑖𝑗 𝑢 =𝜕𝐹
𝜕𝑢𝑖 𝑢 ,𝜕𝐹
𝜕𝑢𝑗 𝑢 = 𝐼𝑝 𝐷𝑢𝐹 𝑒𝑖 , 𝐷𝑢𝐹(𝑒𝑗)
Differentialgeometrie 3.86 Jürgen Roth
Zweite Fundamentalform
Bemerkung 3.5.11: Ausdruck in lokalen Koordinaten (Fortsetzung 1)
Nun wird definiert:
𝑖𝑗 𝑢𝑖,𝑗=1,2
ist die symmetrische Matrix, die die zweite
Fundamentalform in den oben angegebenen Koordinaten beschreibt.
Die Matrixkoeffizienten für die Weingarten-Abbildung werden mit 𝑤𝑖𝑗
bezeichnet und wie folgt definiert:
Die Matrixkoeffizienten der Weingartenabbildung und der zweiten
Fundamentalform lassen sich wie folgt auseinander berechnen:
𝑖𝑗 𝑢 ≔ 𝐼𝐼𝑝 𝐷𝑢𝐹 𝑒𝑖 , 𝐷𝑢𝐹(𝑒𝑗)
= 𝐼𝑝 𝑊𝑝 𝐷𝑢𝐹 𝑒𝑖 , 𝐷𝑢𝐹(𝑒𝑗) = (∗∗)
𝜕2𝐹
𝜕𝑢𝑗𝜕𝑢𝑖 𝑢 , 𝑁 𝑝 , 𝑖, 𝑗 = 1,2
𝑊𝑝 𝐷𝑢𝐹 𝑒𝑖 =: 𝑤𝑖𝑗(𝑢)2
𝑗=1 𝐷𝑢𝐹(𝑒𝑗)
𝑖𝑗 𝑢 ≔ 𝐼𝐼 𝐷𝑢𝐹 𝑒𝑖 , 𝐷𝑢𝐹 𝑒𝑗 = 𝐼 𝑊 𝐷𝑢𝐹 𝑒𝑖 , 𝐷𝑢𝐹(𝑒𝑗)
= 𝐼 𝑤𝑖𝑘(𝑢)2
𝑘=1 𝐷𝑢𝐹(𝑒𝑘), 𝐷𝑢𝐹(𝑒𝑗)
= 𝑤𝑖𝑘(𝑢)2
𝑘=1 𝐼 𝐷𝑢𝐹(𝑒𝑘), 𝐷𝑢𝐹(𝑒𝑗) = 𝑤𝑖𝑘 𝑢 𝑔𝑘𝑗 𝑢2
𝑘=1
Differentialgeometrie 3.87 Jürgen Roth
Zweite Fundamentalform
Bemerkung 3.5.11: Ausdruck in lokalen Koordinaten (Fortsetzung 2)
Die Matrix 𝑖𝑗 𝑢𝑖,𝑗
entsteht also durch Matrixmultiplikation
aus den Matrizen 𝑤𝑖𝑘 𝑢
𝑖,𝑘 und 𝑔𝑘𝑗 𝑢
𝑘,𝑗.
Da die Matrix 𝑔𝑘𝑗 𝑢𝑘,𝑗
positiv definit und folglich insbesondere
invertierbar ist, lässt sich die Gleichung nach 𝑤𝑖𝑘 𝑢
𝑖,𝑘 auflösen.
Wenn 𝑔𝑖𝑗 𝑢𝑖,𝑗
die zu 𝑔𝑖𝑗 𝑢𝑖,𝑗
inverse Matrix ist, wenn also gilt:
𝑔𝑖𝑗 𝑢𝑖𝑗
=1
𝑔11 𝑢 𝑔22 𝑢 −𝑔12 𝑢 2
𝑔22(𝑢) −𝑔12(𝑢)−𝑔21(𝑢) 𝑔11(𝑢)
Dann folgt direkt:
𝑖𝑘 𝑢 𝑔𝑘𝑗 𝑢 = 𝑤𝑖𝑗(𝑢)
2
𝑘=1
Differentialgeometrie 3.88 Jürgen Roth
3.6 Krümmung
Kapitel 3: Klassische Flächentheorie
Differentialgeometrie 3.89 Jürgen Roth
Krümmung von Kurven
in regulären Flächen
Bemerkung 3.6.1
In diesem Abschnitt geht es um verschiedene Konzepte zum
wichtigen Begriff der Krümmung von regulären Flächen.
Zunächst geht es um die Normalkrümmung, die über die
Krümmung von in der regulären Fläche verlaufenden
parametrisierten Kurven erklärt wird.
Wir betrachten eine orientierbare reguläre Fläche 𝑆 ⊂ ℝ3, mit
glattem Einheitsnormalenfeld 𝑁, einen Punkt 𝑝 ∈ 𝑆 und eine nach
Bogenlänge parametrisierte Kurve 𝛾: −휀, 휀 → 𝑆.
Als Raumkurve im ℝ3 hat 𝛾 in 0 die Krümmung 𝜅 0 ≔ 𝛾 (0) ,
die für 𝜅 0 ≠ 0 durch 𝛾 0 = 𝜅 0 ∙ 𝑛 0 gegeben ist, wobei
𝑛(0) ≔ 𝛾 (0) 𝛾 (0) der Normalenvektor von 𝛾 ist.
Diese Krümmung wird nun in zwei Teile aufgespalten, nämlich
einen Teil der auf die Krümmung von 𝛾 innerhalb von 𝑆 zurückgeht
und einen Teil, der die Krümmung von 𝑆 im ℝ3 beschreibt.
Differentialgeometrie 3.90 Jürgen Roth
Krümmung von Kurven
in regulären Flächen
Bemerkung 3.6.1 (Fortsetzung)
Aus diesem Grund wird 𝑛(0) in einen Anteil tangential zu 𝑆 und
eine Anteil senkrecht zu 𝑆 zerlegt.
𝑛 0 = 𝑛 0 𝑡𝑎𝑛𝑔 + 𝑛 0 𝑠𝑒𝑛𝑘
Dabei ist
𝑛 0 𝑠𝑒𝑛𝑘 = 𝑛 0 ,𝑁(𝑝) ∙ 𝑁 𝑝 .
Daraus folgt:
𝛾 0 = 𝜅 0 ∙ 𝑛 0 = 𝜅 0 ∙ 𝑛 0 𝑡𝑎𝑛𝑔 + 𝜅 0 ∙ 𝑛 0 , 𝑁(𝑝) ∙ 𝑁 𝑝
Der tangentiale Anteil, der angibt, wie sich 𝛾 innerhalb von 𝑆
krümmt, führt zur geodätischen Krümmung von 𝛾 in 𝑆, die
später (Differentialgeometrie II) thematisiert wird.
Im Augenblick interessiert die Krümmung von 𝑆 im ℝ3. Dazu
definieren wir die Normalenkrümmung 𝜿𝒏𝒐𝒓 einer orientierbaren
regulären Fläche.
Differentialgeometrie 3.91 Jürgen Roth
Normalenkrümmung 𝜿𝒏𝒐𝒓
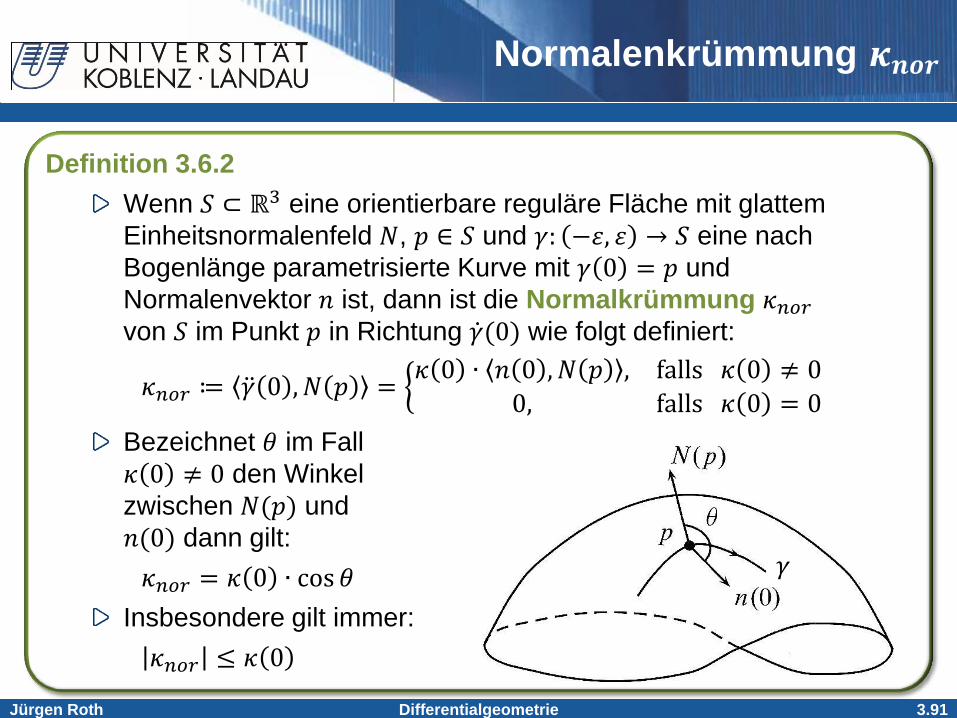
Definition 3.6.2
Wenn 𝑆 ⊂ ℝ3 eine orientierbare reguläre Fläche mit glattem
Einheitsnormalenfeld 𝑁, 𝑝 ∈ 𝑆 und 𝛾: −휀, 휀 → 𝑆 eine nach
Bogenlänge parametrisierte Kurve mit 𝛾 0 = 𝑝 und
Normalenvektor 𝑛 ist, dann ist die Normalkrümmung 𝜅𝑛𝑜𝑟 von 𝑆 im Punkt 𝑝 in Richtung 𝛾 (0) wie folgt definiert:
𝜅𝑛𝑜𝑟 ≔ 𝛾 0 , 𝑁 𝑝 = 𝜅 0 ∙ 𝑛 0 , 𝑁 𝑝 , falls 𝜅 0 ≠ 0
0, falls 𝜅 0 = 0
Bezeichnet 𝜃 im Fall
𝜅 0 ≠ 0 den Winkel
zwischen 𝑁(𝑝) und
𝑛(0) dann gilt:
𝜅𝑛𝑜𝑟 = 𝜅 0 ∙ cos 𝜃
Insbesondere gilt immer:
𝜅𝑛𝑜𝑟 ≤ 𝜅 0
𝛾
Differentialgeometrie 3.92 Jürgen Roth
Normalenkrümmung 𝜿𝒏𝒐𝒓
Satz 3.6.2: Satz von Meusnier
Wenn 𝑆 ⊂ ℝ3 eine orientierbare reguläre Fläche mit Einheitsnormalenfeld
𝑁 und zweiter Fundamentalform 𝐼𝐼 ist, 𝑝 ∈ 𝑆 und 𝛾: −휀, 휀 → 𝑆 eine nach
Bogenlänge parametrisierte Kurve mit 𝛾 0 = 𝑝 ist, dann gilt für die
Normalenkrümmung 𝜅𝑛𝑜𝑟 von 𝛾:
𝜅𝑛𝑜𝑟 = 𝐼𝐼 𝛾 0 , 𝛾 0
Insbesondere haben alle nach Bogenlänge parametrisierten
Kurven in 𝑆 durch 𝑝 mit demselben Tangentialvektor dieselbe
Normalkrümmung. 𝜅𝑛𝑜𝑟 ist also unabhängig von der Wahl der Kurve 𝛾.
Beweis
Da 𝛾 in 𝑆 verläuft, gilt ∀𝑡∈ −𝜀,𝜀 𝑁 𝛾 𝑡 , 𝛾 (𝑡) = 0
Differentiation dieser Gleichung liefert:
0 =𝑑
𝑑𝑡𝑁 𝛾 𝑡 , 𝛾 (𝑡)
𝑡=0 =
𝑑
𝑑𝑡𝑁 𝛾 𝑡
𝑡=0, 𝛾 (0) + 𝑁 𝑝 , 𝛾 (0)
= 𝑑𝑝𝑁 𝛾 0 , 𝛾 (0) + 𝜅𝑛𝑜𝑟 = −𝑊𝑝 𝛾 0 , 𝛾 (0) + 𝜅𝑛𝑜𝑟
= −𝐼𝐼 𝛾 0 , 𝛾 0 + 𝜅𝑛𝑜𝑟 #
Differentialgeometrie 3.93 Jürgen Roth
Normalenkrümmung 𝜿𝒏𝒐𝒓
Bemerkung 3.6.3
Ein Orientierungswechsel der Kurve 𝛾 ändert den Wert der
Normalenkrümmung 𝜅𝑛𝑜𝑟 nicht, denn es gilt:
𝐼𝐼 −𝛾 0 , −𝛾 0 = 𝐼𝐼 𝛾 0 , 𝛾 0
Ein Orientierungswechsel der Fläche 𝑆, bei dem 𝑁 𝑝 durch
−𝑁(𝑝) ersetzt wird, führt dagegen zum Vorzeichenwechsel der
Normalenkrümmung 𝜅𝑛𝑜𝑟: 𝛾 0 , −𝑁(𝑝) = − 𝛾 0 , 𝑁(𝑝)
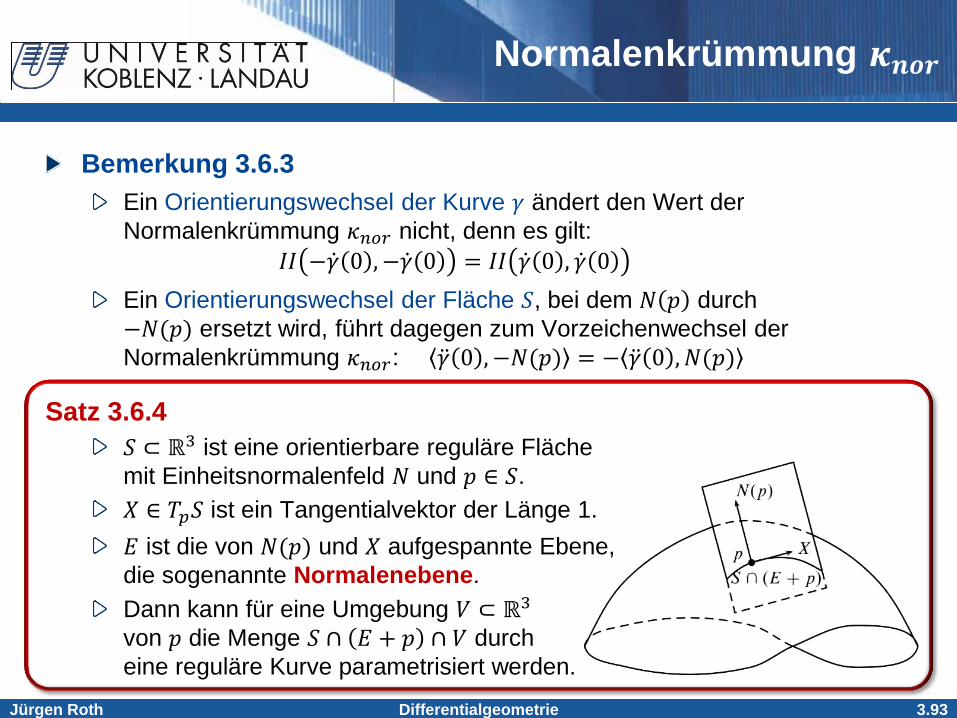
Satz 3.6.4
𝑆 ⊂ ℝ3 ist eine orientierbare reguläre Fläche
mit Einheitsnormalenfeld 𝑁 und 𝑝 ∈ 𝑆.
𝑋 ∈ 𝑇𝑝𝑆 ist ein Tangentialvektor der Länge 1.
𝐸 ist die von 𝑁(𝑝) und 𝑋 aufgespannte Ebene,
die sogenannte Normalenebene.
Dann kann für eine Umgebung 𝑉 ⊂ ℝ3
von 𝑝 die Menge 𝑆 ∩ 𝐸 + 𝑝 ∩ 𝑉 durch
eine reguläre Kurve parametrisiert werden.
Differentialgeometrie 3.94 Jürgen Roth
Normalenkrümmung 𝜿𝒏𝒐𝒓
Bemerkung 3.6.5
Nach dem Satz von Meusnier (Satz 3.6.2) kann zur Berechnung
der Normalkrümmung 𝜅𝑛𝑜𝑟 = 𝐼𝐼(𝑋, 𝑋) die nach Bogenlänge
parametrisierte Kurve 𝛾 verwenden, die 𝑆 ∩ 𝐸 + 𝑝 ∩ 𝑉 beschreibt.
Fasst man 𝛾 als ebene Kurve in der Ebene 𝐸 + 𝑝 ≅ ℝ2 auf, dann
ist der Kurvennormalenvektor
𝑛 0 = ±𝑁(𝑝)
und somit die Normalenkrümmung
𝜅𝑛𝑜𝑟 = 𝐼𝐼 𝑋, 𝑋 = 𝜅 0 ∙ 𝑛 0 , 𝑁(𝑝) = ±𝜅(0),
wobei 𝜅 die Krümmung von 𝛾 als ebene Kurve ist.
Dies erklärt die Bezeichnung Normalkrümmung.
Die Normalkrümmung ist die Krümmung der ebenen Kurve
𝑆 ∩ 𝐸 + 𝑝 ∩ 𝑉 in der Ebene 𝐸 aufgespannt durch 𝑋 und den
Normalenvektor.
Differentialgeometrie 3.95 Jürgen Roth
Normalenkrümmung 𝜿𝒏𝒐𝒓
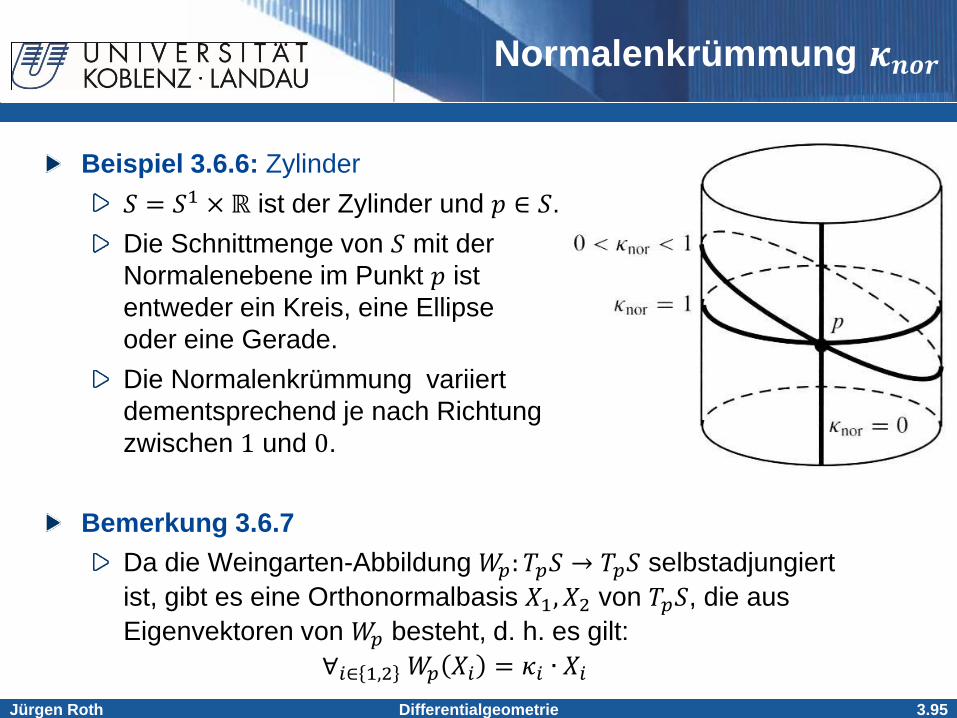
Beispiel 3.6.6: Zylinder
𝑆 = 𝑆1 × ℝ ist der Zylinder und 𝑝 ∈ 𝑆.
Die Schnittmenge von 𝑆 mit der
Normalenebene im Punkt 𝑝 ist
entweder ein Kreis, eine Ellipse
oder eine Gerade.
Die Normalenkrümmung variiert
dementsprechend je nach Richtung
zwischen 1 und 0.
Bemerkung 3.6.7
Da die Weingarten-Abbildung 𝑊𝑝: 𝑇𝑝𝑆 → 𝑇𝑝𝑆 selbstadjungiert
ist, gibt es eine Orthonormalbasis 𝑋1, 𝑋2 von 𝑇𝑝𝑆, die aus
Eigenvektoren von 𝑊𝑝 besteht, d. h. es gilt:
∀𝑖∈ 1,2 𝑊𝑝 𝑋𝑖 = 𝜅𝑖 ∙ 𝑋𝑖
Differentialgeometrie 3.96 Jürgen Roth
Hauptkrümmungen
Definition 3.6.8
Die Eigenwerte 𝜅1 und 𝜅2 der Weingarten-Abbildung
𝑊𝑝: 𝑇𝑝𝑆 → 𝑇𝑝𝑆 heißen Hauptkrümmungen von 𝑆 ⊂ ℝ3
im Punkt 𝑝.
Die zugehörigen Eigenvektoren ±𝑋1 und ±𝑋2 heißen
Hauptkrümmungsrichtungen.
Bemerkung 3.6.9
Im Folgenden soll in der Regel gelten: 𝜅1 ≤ 𝜅2
Jeder Einheitsvektor 𝑋 ∈ 𝑇𝑝𝑆 kann mit einem geeigneten 𝜑 ∈ ℝ
in der Orthonormalbasis 𝑋1, 𝑋2 wie folgt ausgedrückt werden:
𝑋 = cos 𝜑 ∙ 𝑋1 + sin 𝜑 ∙ 𝑋2
Durch Einsetzen in die zweite Fundamentalform ergibt sich die
Euler-Formel für die Normalkrümmung 𝜅𝑛𝑜𝑟 in Richtung 𝑋:
𝜅𝑛𝑜𝑟 = 𝐼𝐼 𝑋, 𝑋 = 𝐼 𝑊𝑝 𝑋 , 𝑋 = cos2 𝜑 ∙ 𝜅1 + sin2 𝜑 ∙ 𝜅2
Differentialgeometrie 3.97 Jürgen Roth
Eulerformel für die
Normalkrümmung 𝜅𝑛𝑜𝑟
Euler-Formel für die Normalkrümmung 𝜅𝑛𝑜𝑟 in Richtung 𝑋:
𝜅𝑛𝑜𝑟 = 𝐼𝐼 𝑋, 𝑋 = 𝐼 𝑊𝑝 𝑋 , 𝑋 = 𝑊𝑝 𝑋 , 𝑋
= 𝑊𝑝 cos 𝜑 ∙ 𝑋1 + sin 𝜑 ∙ 𝑋2 , cos 𝜑 ∙ 𝑋1 + sin 𝜑 ∙ 𝑋2
= cos 𝜑 ∙ 𝑊𝑝 𝑋1 + sin 𝜑 ∙ 𝑊𝑝 𝑋2 , cos 𝜑 ∙ 𝑋1 + sin 𝜑 ∙ 𝑋2
= cos 𝜑 ∙ 𝜅1 ∙ 𝑋1, cos 𝜑 ∙ 𝑋1 + sin 𝜑 ∙ 𝑋2
+ sin 𝜑 ∙ 𝜅2 ∙ 𝑋2, cos 𝜑 ∙ 𝑋1 + sin 𝜑 ∙ 𝑋2
= cos 𝜑 ∙ 𝜅1 ∙ 𝑋1, cos 𝜑 ∙ 𝑋1 + sin 𝜑 ∙ 𝑋2
+ sin 𝜑 ∙ 𝜅2 ∙ 𝑋2, cos 𝜑 ∙ 𝑋1 + sin 𝜑 ∙ 𝑋2
= cos2 𝜑 ∙ 𝜅1 ∙ 𝑋1, 𝑋1 + sin 𝜑 ∙ cos 𝜑 ∙ 𝜅1 ∙ 𝑋1, 𝑋2
+ sin 𝜑 ∙ cos 𝜑 ∙ 𝜅2 ∙ 𝑋2, 𝑋1 + sin2 𝜑 ∙ 𝜅2 ∙ 𝑋2, 𝑋2
= cos2 𝜑 ∙ 𝜅1 ∙ 1 + sin 𝜑 ∙ cos 𝜑 ∙ 𝜅1 ∙ 0
+ sin 𝜑 ∙ cos 𝜑 ∙ 𝜅2 ∙ 0 + sin2 𝜑 ∙ 𝜅2 ∙ 1
= cos2 𝜑 ∙ 𝜅1 + sin2 𝜑 ∙ 𝜅2
Differentialgeometrie 3.98 Jürgen Roth
Hauptkrümmungen
Bemerkung 3.6.9 (Fortsetzung)
Insbesondere sind 𝜅1 und 𝜅2 das Minimum und das Maximum aller
Normalkrümmungswerte von 𝑆 in 𝑝, wenn 𝑋 alle Richtungen
durchläuft, d. h. für alle Einheitsvektoren 𝑋 ∈ 𝑇𝑝𝑆.
Beispiel 3.6.10: 𝑥-𝑦-Ebene
𝑆 = ℝ2 × 0 ist die 𝑥-𝑦-Ebene im ℝ3. Es gilt:
∀𝑝∈𝑆∀𝑋∈𝑇𝑝𝑆 𝑊𝑝 𝑋 = −𝑑𝑝𝑁 𝑋 = −𝑑
𝑑𝑡𝑁 ∘ 𝛾
𝑡=0= −
𝑑
𝑑𝑡
001
=000
Daraus folgt:
0 =000
, 𝑋 = 𝑊𝑝 𝑋 ,𝑋 = cos2 𝜑 ∙ 𝜅1 + sin2 𝜑 ∙ 𝜅2
Also gilt: 𝜅1 = 0 und 𝜅2 = 0.
Folglich ist jede Richtung Hauptkrümmungsrichtung.
Differentialgeometrie 3.99 Jürgen Roth
Hauptkrümmungen
Beispiel 3.6.11: Sphäre
Für die Sphäre 𝑆 = 𝑆2 ist bzgl. des inneren Einheitsnormalenfelds
∀𝑝∈𝑆 𝑁 𝑝 = −𝑝
die Weingarten-Abbildung
∀𝑝∈𝑆∀𝑋∈𝑇𝑝𝑆 𝑊𝑝 𝑋 = −𝑑𝑝𝑁 𝑋 = −𝑑
𝑑𝑡𝑁 ∘ 𝛾(𝑡)
𝑡=0
= −𝑑
𝑑𝑡−𝛾 𝑡
𝑡=0= 𝛾 𝑡 𝑡=0 = 𝑋
die identische Abbildung.
Folglich gilt für jeden Einheitsvektor 𝑋 ∈ 𝑇𝑝𝑆:
1 = 𝑋, 𝑋 = 𝑊𝑝 𝑋 , 𝑋 = cos2 𝜑 ∙ 𝜅1 + sin2 𝜑 ∙ 𝜅2
Daraus folgt:
𝜅1 = 𝜅2 = 1
Damit ist jede Richtung 𝑋 ∈ 𝑇𝑝𝑆 Hauptkrümmungsrichtung.
Differentialgeometrie 3.100 Jürgen Roth
Hauptkrümmungen
Beispiel 3.6.12: Zylinder
Der Zylinder 𝑆 = 𝑆1 × ℝ besitzt bzgl.
des Punktes 𝑝 = 𝑥, 𝑦, 𝑧 𝑇 und
des inneren Einheitsnormalenfelds 𝑁 𝑥, 𝑦, 𝑧 𝑇 = − 𝑥, 𝑦, 0 𝑇
sowie der Basisvektoren 𝑋1 = −𝑦, 𝑥, 0 𝑇 und 𝑋2 = 0,0,1 𝑇
der Tangentialebene 𝑇𝑝𝑆
die Weingarten-Abbildung 𝑊𝑝 mit der Matrixdarstellung
(vgl. Beispiel 3.5.7)
1 00 0
.
Dies bedeutet, dass 𝑋1 und 𝑋2 die Hauptkrümmungsrichtungen
zu den Hauptkrümmungen 𝜅1 = 1 und 𝜅2 = 0 sind.
Differentialgeometrie 3.101 Jürgen Roth
Krümmungslinie
Definition 3.6.13
Wenn 𝑆 ⊂ ℝ3 eine reguläre Fläche und 𝛾: 𝐼 → 𝑆 eine nach
Bogenlänge parametrisierte Kurve ist, für die ∀𝑡∈𝐼 𝛾 (𝑡) eine
Hauptkrümmungsrichtung ist, dann heißt 𝛾 Krümmungslinie.
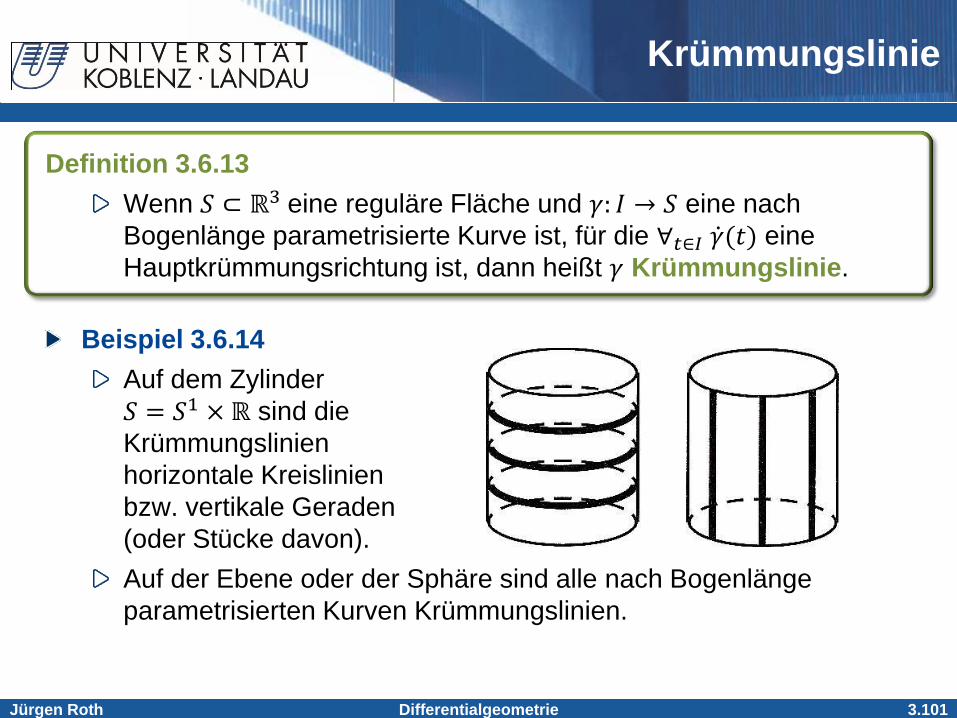
Beispiel 3.6.14
Auf dem Zylinder
𝑆 = 𝑆1 × ℝ sind die
Krümmungslinien
horizontale Kreislinien
bzw. vertikale Geraden
(oder Stücke davon).
Auf der Ebene oder der Sphäre sind alle nach Bogenlänge
parametrisierten Kurven Krümmungslinien.
Differentialgeometrie 3.102 Jürgen Roth
Nichtorientierbare
reguläre Flächen
Bemerkung 3.6.15
Kehrt man auf einer orientierbaren regulären Fläche die
Orientierung um, d. h. ersetzt man 𝑁(𝑝) durch −𝑁 𝑝 ,
dann geht 𝑊𝑝 in −𝑊𝑝 über
und 𝜅1 sowie 𝜅2 werden durch −𝜅1 und −𝜅2 ersetzt.
Die Eigenvektoren von 𝑊𝑝 und damit die
Hauptkrümmungsrichtungen bleiben dagegen erhalten.
Aus diesem Grund sind Hauptkrümmungsrichtungen und
Krümmungslinien auch auf nichtorientierbaren regulären
Flächen definiert.
Die Hauptkrümmungen sind auf nichtorientierbaren regulären
Flächen dagegen nur bis auf das Vorzeichen definiert.
Differentialgeometrie 3.103 Jürgen Roth
Satz von Rodriguez
Satz 3.6.16: Satz von Rodriguez
Wenn
𝑆 ⊂ ℝ3 eine orientierbare reguläre Fläche,
𝑁: 𝑆 → 𝑆2 die Gauß-Abbildung und
𝛾: 𝐼 → 𝑆 eine nach Bogenlänge parametrisierte Kurve ist,
dann ist 𝛾 genau dann Krümmungslinie auf 𝑆, wenn es eine
Funktion 𝜆: 𝐼 → ℝ gibt, mit
∀𝑡∈𝐼 𝑑
𝑑𝑡𝑁 𝛾 𝑡 = 𝜆 𝑡 ∙ 𝛾 𝑡
In diesem Fall ist −𝜆 𝑡 die entsprechende Hauptkrümmung.
Beweis
Übungsaufgabe
Lösungshinweis: Bär (2010, S. 300, 3.10)
Differentialgeometrie 3.104 Jürgen Roth
Gauß-Krümmung 𝑲 und
mittlere Krümmung 𝑯
Definition 3.6.17
𝑆 ⊂ ℝ3 ist eine reguläre Fläche, 𝑝 ∈ 𝑆 ein Punkt der Fläche,
und 𝜅1 sowie 𝜅2 sind die Hauptkrümmungen von 𝑆 in 𝑝.
Dann heißt
𝐾 𝑝 ≔ 𝜅1 ∙ 𝜅2 = det 𝑊𝑝
die Gauß-Krümmung 𝑲(𝒑) von 𝑆 in 𝑝 und
𝐻 𝑝 ≔𝜅1 + 𝜅2
2=
1
2∙ Spur(𝑊𝑝)
die mittlere Krümmung 𝑯(𝒑) von 𝑆 in 𝑝.
Bemerkung 3.6.18
Beide Krümmungsbegriffe stellen eine Mittelwertbildung der
Hauptkrümmungen 𝜅1 und 𝜅2 dar:
Die mittlere Krümmung 𝐻 ist das arithmetische Mittel,
die Gauß-Krümmung 𝐾 ist das Quadrat des geometrischen Mittels.
Differentialgeometrie 3.105 Jürgen Roth
Mittleres Krümmungsfeld 𝓗
Bemerkung 3.6.19
Wenn man auf einer orientierten regulären Fläche die Orientierung
umkehrt, dann wechseln die Hauptkrümmungen ihr Vorzeichen.
Also geht auch 𝐻 𝑝 in −𝐻 𝑝 über, aber 𝐾 𝑝 bleibt unverändert.
Somit ist die Gauß-Krümmung auch für nichtorientierbare Flächen
definiert, die mittlere Krümmung dagegen nur bis auf das
Vorzeichen.
Um eine Version der mittleren Krümmung zu erhalten, die sich bei
Orientierungswechseln nicht ändert und auch auf nichtorientierten
Flächen definiert ist, betrachtet man statt der reellwertigen
Funktion 𝐻 häufig das mittlere Krümmungsfeld 𝓗, das wie folgt
definiert ist:
ℋ ≔ 𝐻 ∙ 𝑁
Im Gegensatz zur mittleren Krümmung 𝐻 ist ℋ also keine
reellwertige Funktion sondern ein Normalenfeld auf der Fläche 𝑆.
Differentialgeometrie 3.106 Jürgen Roth
Elliptische, hyperbolische, parabo-
lische Punkte & Flachpunkte
Definition 3.6.20
Ein Punkt 𝑝 einer orientierten regulären Fläche 𝑆 ⊂ ℝ3 heißt
elliptischer Punkt, wenn 𝐾 𝑝 > 0,
hyperbolischer Punkt, wenn 𝐾 𝑝 < 0,
parabolischer Punkt, wenn 𝐾 𝑝 = 0 ∧ 𝑊𝑝 ≠ 0,
d. h. wenn eine der beiden Hauptkrümmungen
verschwindet, die andere aber nicht,
Flachpunkt, wenn 𝑊𝑝 = 0, d. h. 𝜅1 = 𝜅2 = 0.
Bemerkung 3.6.21
Die Begriffe elliptischer Punkt, hyperbolischer Punkt, parabolischer
Punkt und Flachpunkt sind auch auf nichtorientierbaren Flächen
erklärt, obwohl 𝑊𝑝 dort nur bis auf das Vorzeichen definiert ist.
Differentialgeometrie 3.107 Jürgen Roth
Beispiele
Beispiel 3.6.22: Ebene
Für die Ebene 𝑆 = ℝ2 × *0+ gilt: ∀𝑝∈𝑆 𝑊𝑝 = 0, also 𝜅1 = 𝜅2 = 0
Folglich sind alle Punkte der Ebene Flachpunkte.
Damit sind sowohl die Gauß-Krümmung 𝐾 = 𝜅1 ∙ 𝜅2 als auch
die mittlere Krümmung 𝐻 = 𝜅1+𝜅22
identisch gleich Null
Beispiel 3.6.23: Sphäre
Für die Sphäre 𝑆 = 𝑆2 mit der durch das innere Einheitsnormalenfeld
𝑁 𝑝 = −𝑝 gegebenen Orientierung gilt: ∀𝑝∈𝑆 𝑊𝑝 = 𝑖𝑑
Folglich gilt für die Vektoren 𝑋1, 𝑋2 der Orthonormalbasis von 𝑇𝑝𝑆:
𝜅1 ∙ 𝑋1 = 𝑊𝑝 𝑋1 = 𝑋1 ⇒ 𝜅1 = 1
𝜅2 ∙ 𝑋2 = 𝑊𝑝 𝑋2 = 𝑋2 ⇒ 𝜅2 = 1
Damit ist die Gauß-Krümmung 𝐾 = 𝜅1 ∙ 𝜅2 = 1 und
folglich sind alle Punkte der Sphäre elliptische Punkte.
Mittlere Krümmung: 𝐻 = 𝜅1+𝜅22
= 1
Mittleres Krümmungsfeld: ℋ 𝑝 = 𝐻 ∙ 𝑁 𝑝 = 1 ∙ −𝑝 = −𝑝
Differentialgeometrie 3.108 Jürgen Roth
Beispiele
Beispiel 3.6.24: Zylinder
Für den Zylinder 𝑆 = 𝑆1 × ℝ mit der durch das
innere Einheitsnormalenfeld
𝑁 𝑥, 𝑦, 𝑧 𝑇 = − 𝑥, 𝑦, 0 𝑇
gegebenen Orientierung wurden in Beispiel 3.6.12
folgende Hauptkrümmungen bestimmt:
𝜅1 = 1 ∧ 𝜅2 = 0
Damit ergibt sich:
Gauß-Krümmung (Wie bei der Ebene!) :
𝐾 = 𝜅1 ∙ 𝜅2 = 0
Mittlere Krümmung:
𝐻 =𝜅1 + 𝜅2
2=
1
2
Es sind also alle Punkte des Zylinders parabolische Punkte
Differentialgeometrie 3.109 Jürgen Roth
Das hyperbolische Paraboloid
(die Sattelfläche)
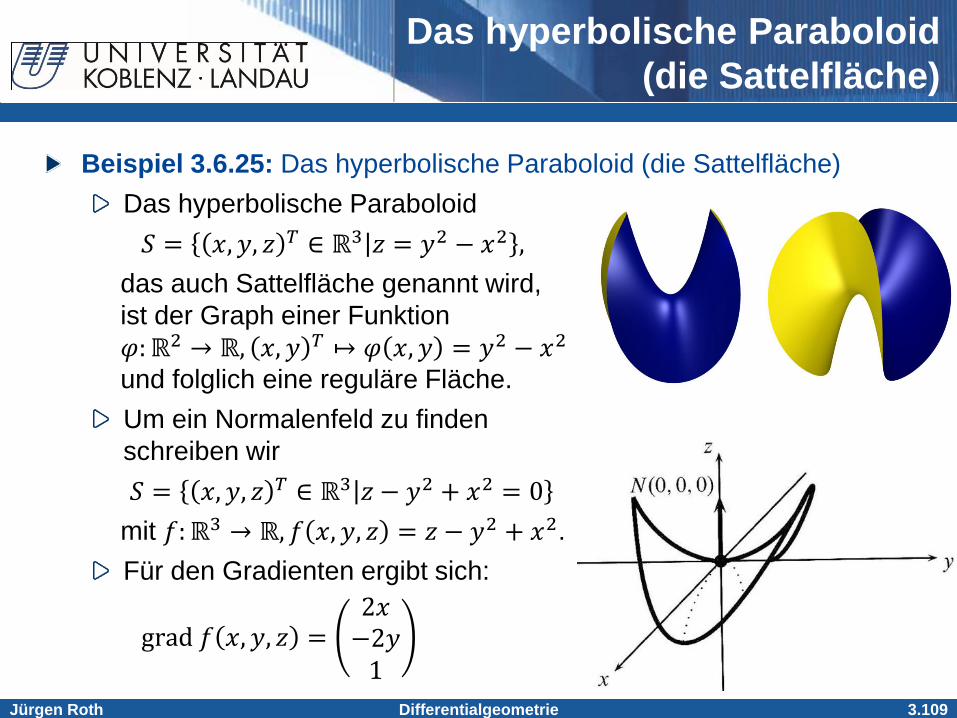
Beispiel 3.6.25: Das hyperbolische Paraboloid (die Sattelfläche)
Das hyperbolische Paraboloid
𝑆 = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑧 = 𝑦2 − 𝑥2 ,
das auch Sattelfläche genannt wird,
ist der Graph einer Funktion
𝜑:ℝ2 → ℝ, 𝑥, 𝑦 𝑇 ↦ 𝜑 𝑥, 𝑦 = 𝑦2 − 𝑥2
und folglich eine reguläre Fläche.
Um ein Normalenfeld zu finden
schreiben wir
𝑆 = 𝑥, 𝑦, 𝑧 𝑇 ∈ ℝ3 𝑧 − 𝑦2 + 𝑥2 = 0
mit 𝑓:ℝ3 → ℝ, 𝑓 𝑥, 𝑦, 𝑧 = 𝑧 − 𝑦2 + 𝑥2.
Für den Gradienten ergibt sich:
grad 𝑓 𝑥, 𝑦, 𝑧 =2𝑥
−2𝑦1
Differentialgeometrie 3.110 Jürgen Roth
Das hyperbolische Paraboloid
(die Sattelfläche)
Beispiel 3.6.25 (Fortsetzung 1)
Da der Gradient nach Satz 3.2.5b überall senkrecht auf 𝑆 steht,
erhält man ein Einheitsnormalenfeld und damit eine Orientierung
durch: 𝑁 𝑥, 𝑦, 𝑧 =grad 𝑓(𝑥,𝑦,𝑧)
grad 𝑓(𝑥,𝑦,𝑧)=
2𝑥,2𝑦,1 𝑇
4𝑥2+4𝑦2+1
Im Punkt 𝑥, 𝑦, 𝑧 𝑇 = 0,0,0 𝑇 =: 𝑝 ergibt sich: 𝑁 𝑝 = 0,0,1 𝑇
Bestimmung der Weingarten-Abbildung 𝑊𝑝 für den Punkt 𝑝:
Die Tangentialebene 𝑇𝑝𝑆 hat die Orthonormalbasis
𝑋1 = 1,0,0 𝑇 und 𝑋2 = 0,1,0 𝑇.
Die Kurve 𝛾:ℝ → 𝑆, 𝑡 ↦ 𝛾 𝑡 = 𝑡, 0, −𝑡2 𝑇 erfüllt die
Bedingungen 𝛾 0 = 0,0,0, 𝑇 = 𝑝 und 𝛾 0 = 1,0,0, 𝑇 = 𝑋1
Damit ergibt sich:
𝑊𝑝 𝑋1 = −𝑑𝑝𝑁 𝑋1 = −𝑑
𝑑𝑡𝑁 𝛾 𝑡
𝑡=0 = −
𝑑
𝑑𝑡𝑁 𝑡, 0, −𝑡2
𝑡=0
= −𝑑
𝑑𝑡
2𝑡,0,1 𝑇
4𝑡2+1 𝑡=0
= −𝑑
𝑑𝑡4𝑡2 + 1 −
1
2 ∙ 2𝑡, 0,1 𝑇 𝑡=0
Differentialgeometrie 3.111 Jürgen Roth
Das hyperbolische Paraboloid
(die Sattelfläche)
Beispiel 3.6.25 (Fortsetzung 2)
Bestimmung der Weingarten-Abbildung 𝑊𝑝 für den Punkt 𝑝:
Damit ergibt sich:
Daraus folgt: 𝑊𝑝 𝑋1 = −2 ∙ 𝑋1 und 𝜅1 = −2
Analog ergibt sich mit Hilfe der Kurve 𝛾 𝑡 = 0, 𝑡, 𝑡2 𝑇:
𝑊𝑝 𝑋2 = 2 ∙ 𝑋2 und 𝜅2 = 2
Also ist 𝑝 = 0,0,0 𝑇 ein hyperbolischer Punkt mit
𝐾 = 𝜅1 ∙ 𝜅2 = −2 ∙ 2 = −4 und 𝐻 =𝜅1+𝜅2
2= 0.
𝑊𝑝 𝑋1 = −𝑑
𝑑𝑡4𝑡2 + 1 −
1
2 ∙ 2𝑡, 0,1 𝑇 𝑡=0
= − −1
24𝑡2 + 1 −
3
2 ∙ 8𝑡 ∙ 2𝑡, 0,1 𝑇 + 4𝑡2 + 1 −1
2 ∙ 2,0,0 𝑇 𝑡=0
= −1−12 ∙ 2,0,0 𝑇
= − 2,0,0 𝑇
= −2 ∙ 1,0,0 𝑇
Differentialgeometrie 3.112 Jürgen Roth
Weiteres Programm
Bemerkung 3.6.26
Anhand von speziellen lokalen Parametrisierungen
von regulären Flächen lässt sich erkennen, dass
die zweite Fundamentalform näherungsweise angibt,
wie sich die Fläche in der Nähe eines Punktes von
der Tangentialebene entfernt.
Insbesondere ergibt sich, dass sich jede Fläche lokal
als Graph über der Tangentialebene angeben lässt.
Schließlich geht es um die Frage, was die Krümmungs-
eigenschaften über das lokale geometrische Verhalten
der Fläche aussagen.
Differentialgeometrie 3.113 Jürgen Roth
Abweichung einer Fläche
von der Tangentialebene
Satz 3.6.27
Voraussetzungen:
𝑆 ⊂ ℝ3 ist eine reguläre Fläche und 𝑝 ∈ 𝑆.
𝑋1, 𝑋2 bilden eine Orthonormalbasis von 𝑇𝑝𝑆.
𝑁 ist ein glattes Einheitsnormalenfeld auf 𝑆 das in einer
Umgebung des Punktes 𝑝 so definiert ist, dass gilt:
𝑋1, 𝑋2, 𝑁(𝑝) ist eine positiv orientierte Orthonormalbasis des ℝ3.
Dann gibt es eine lokale Parametrisierung 𝑈, 𝐹, 𝑉 von 𝑆 um 𝑝, mit:
0,0 𝑇 ∈ 𝑈 ∧ 𝐹 0,0 = 𝑝
∀𝑖,𝑗=12 𝑔𝑖𝑗 0,0 = 𝛿𝑖𝑗
∀𝑖,𝑗,𝑘=12
𝜕𝑔𝑖𝑗
𝜕𝑢𝑘 0,0 = 0
𝐹 𝑢 − 𝑝 = 𝑢1 ∙ 𝑋1 + 𝑢2 ∙ 𝑋2 +1
2 𝑖𝑗 0,02
𝑖,𝑗=1 𝑢𝑖𝑢𝑗 ∙ 𝑁 𝑝 + 𝑂 𝑢 3
Dabei sind (𝑔𝑖𝑗) und (𝑖𝑗) die lokalen Darstellungen der ersten bzw.
zweiten Fundamentalform bzgl. der lokalen Parametrisierung 𝑈, 𝐹, 𝑉 .
Beweis: Vgl.
Bär (2010, S.132ff)
Differentialgeometrie 3.114 Jürgen Roth
Reguläre Flächen
sind lokal Graphen
Satz 3.6.28
Jede reguläre Fläche 𝑆 kann lokal als Graph über ihrer
affinen Tangentialebne 𝑇𝑝𝑆 + 𝑝 aufgefasst werden.
Beweis
𝑆 ⊂ ℝ3 ist eine reguläre Fläche und 𝑝 ∈ 𝑆 ein Punkt dieser Fläche.
Zur Vereinfachung der Schreibweise wird die Fläche so im ℝ3
gedreht und verschoben, dass 𝑝 = 0,0,0 𝑇 und die Tangential-
ebene 𝑇𝑝𝑆 von den ersten beiden Einheitsvektoren 𝑒1 und 𝑒2
aufgespannt wird.
Dan gibt es nach dem Satz 3.6.27 eine lokale Parametrisierung
𝑈, 𝐹, 𝑉 von 𝑆 und 𝑝 der folgenden Form:
𝐹 𝑢1, 𝑢2 = 𝑢1, 𝑢2,1
2∙ 𝑖𝑗 0,0 𝑢𝑖𝑢𝑗2
𝑖,𝑗=1
𝑇+ 𝑂 𝑢 3
𝜋:ℝ3 → 𝑇𝑝𝑆 = ℝ2 × 0 ≅ ℝ2 ist die Orthogonalprojektion
auf die Tangentialebene.
Differentialgeometrie 3.115 Jürgen Roth
Reguläre Flächen
sind lokal Graphen
Beweis zu Satz 3.6.28 (Fortsetzung)
Wegen
𝜋 ∘ 𝐹 𝑢1, 𝑢2 = 𝑢1, 𝑢2 𝑇 + 𝑂 𝑢 3
gilt
𝐷 0,0 𝜋 ∘ 𝐹 =1 00 1
.
Also kann nach dem Umkehrsatz die Abbildung 𝜋 ∘ 𝐹 auf einer
evtl. kleineren Umgebung von 𝑝 umgekehrt werden, d. h. es gibt
eine glatte Abbildung
𝜑:𝑈 ⊂ 𝑇𝑝𝑆 → ℝ2
mit
𝜋 ∘ 𝐹 ∘ 𝜑 = 𝑖𝑑.
Dann gilt:
𝐹 𝜑 𝑣1, 𝑣2 = 𝑣1, 𝑣2, 𝐹 ∘ 𝜑 3 𝑣1, 𝑣2 𝑇
Dies bedeutet aber gerade, dass 𝑆 in der Nähe von 𝑝 genau der
Graph der 3. Komponentenfunktion von 𝐹 ∘ 𝜑 ist.
Differentialgeometrie 3.116 Jürgen Roth
Gauß-Krümmung
Bemerkung 3.6.29
Nach diesen Vorbereitungen kann die Gauß-Krümmung
geometrisch interpretiert werden.
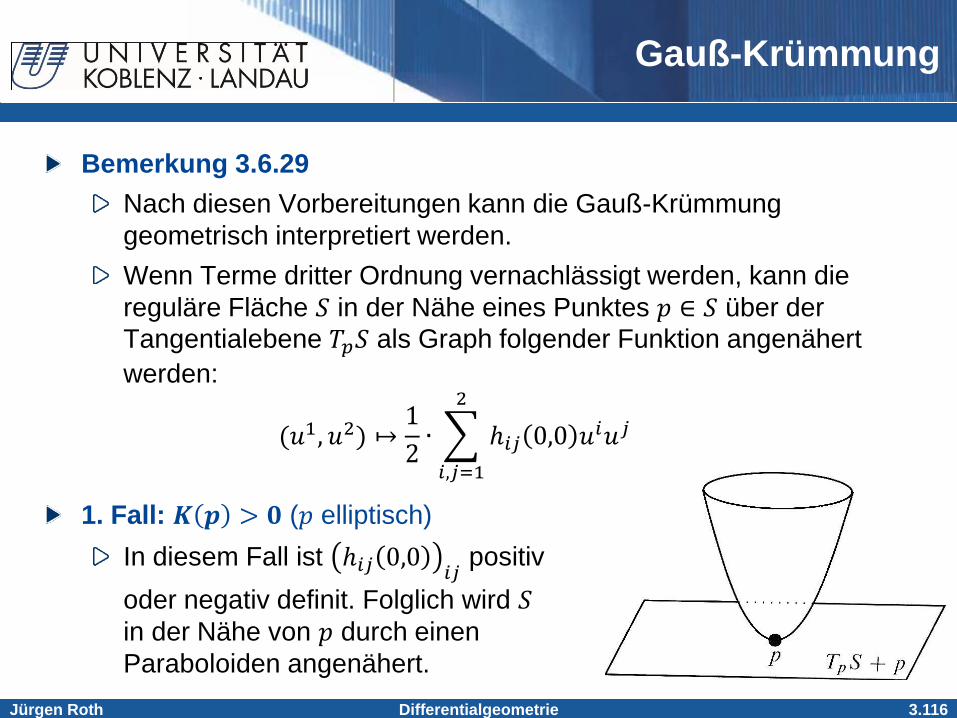
Wenn Terme dritter Ordnung vernachlässigt werden, kann die
reguläre Fläche 𝑆 in der Nähe eines Punktes 𝑝 ∈ 𝑆 über der
Tangentialebene 𝑇𝑝𝑆 als Graph folgender Funktion angenähert
werden:
(𝑢1, 𝑢2) ↦1
2∙ 𝑖𝑗 0,0 𝑢𝑖𝑢𝑗
2
𝑖,𝑗=1
1. Fall: 𝑲 𝒑 > 𝟎 (𝑝 elliptisch)
In diesem Fall ist 𝑖𝑗 0,0𝑖𝑗
positiv
oder negativ definit. Folglich wird 𝑆
in der Nähe von 𝑝 durch einen
Paraboloiden angenähert.
Differentialgeometrie 3.117 Jürgen Roth
Gauß-Krümmung
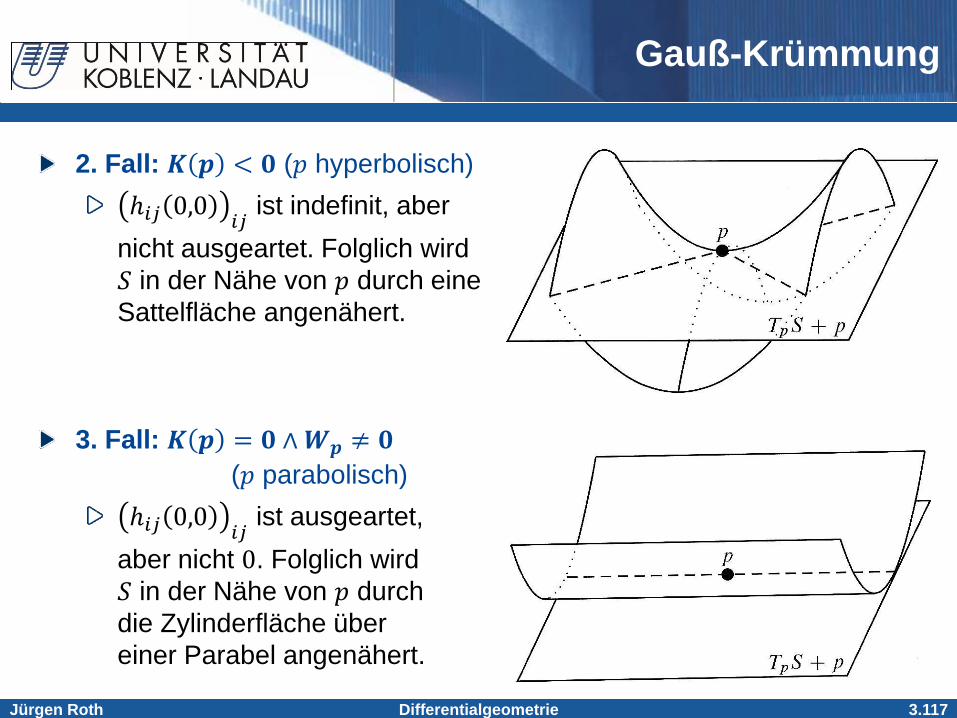
2. Fall: 𝑲 𝒑 < 𝟎 (𝑝 hyperbolisch)
𝑖𝑗 0,0𝑖𝑗
ist indefinit, aber
nicht ausgeartet. Folglich wird
𝑆 in der Nähe von 𝑝 durch eine
Sattelfläche angenähert.
3. Fall: 𝑲 𝒑 = 𝟎 ∧ 𝑾𝒑 ≠ 𝟎
(𝑝 parabolisch)
𝑖𝑗 0,0𝑖𝑗
ist ausgeartet,
aber nicht 0. Folglich wird
𝑆 in der Nähe von 𝑝 durch
die Zylinderfläche über
einer Parabel angenähert.
Differentialgeometrie 3.118 Jürgen Roth
Gauß-Krümmung
4. Fall: 𝑾𝒑 = 𝟎 (𝑝 ist Flachpunkt.)
∀𝑖,𝑗=12 𝑖𝑗 0,0
𝑖𝑗= 0
Folglich stimmt 𝑆 in der Nähe von 𝑝 bis auf Terme dritter Ordnung
mit ihrer Tangentialebene 𝑇𝑝𝑆 überein.