Deckblatt Dezentrales Drehzahlsteuern eines Antriebes über USS-Protokoll mit S7-1200, SINAMICS G110/ G120/ S110 und KTP600 Configuration Example x11 Dezember 2009 Applikationen & Tools Answers for industry.
Transcript
Deckblatt
Dezentrales Drehzahlsteuern eines Antriebes über USS-Protokoll mit S7-1200, SINAMICS G110/ G120/ S110 und KTP600
Configuration Example x11 Dezember 2009
Applikationen & Tools
Answers for industry.
2 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Industry Automation und Drives Technologies Service & Support Portal
Dieser Beitrag stammt aus dem Internet Serviceportal der Siemens AG, Industry Automation und Drives Technologies. Durch den folgenden Link gelangen Sie direkt zur Downloadseite dieses Dokuments.
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 3
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Automatisierungsaufgabe
1s
2 Automatisierungslösung
3 Konfiguration
4Codeelemente SIMATIC CE-X11 - Dezentrales
Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
5Historie
6Anhang
Gewährleistung und Haftung
4 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Gewährleistung und Haftung Hinweis Die Applikationsbeispiele sind unverbindlich und erheben keinen Anspruch auf
Vollständigkeit hinsichtlich Konfiguration und Ausstattung sowie jeglicher Eventualitäten. Die Applikationsbeispiele stellen keine kundenspezifischen Lösungen dar, sondern sollen lediglich Hilfestellung bieten bei typischen Auf-gabenstellungen. Sie sind für den sachgemäßen Betrieb der beschriebenen Produkte selbst verantwortlich. Diese Applikationsbeispiele entheben Sie nicht der Verpflichtung zu sicherem Umgang bei Anwendung, Installation, Betrieb und Wartung. Durch Nutzung dieser Applikationsbeispiele erkennen Sie an, dass wir über die beschriebene Haftungsregelung hinaus nicht für etwaige Schäden haftbar gemacht werden können. Wir behalten uns das Recht vor, Änderungen an diesen Applikationsbeispielen jederzeit ohne Ankündigung durchzuführen. Bei Abweichungen zwischen den Vorschlägen in diesem Applikationsbeispiel und anderen Siemens Publikationen, wie z.B. Katalogen, hat der Inhalt der anderen Dokumentation Vorrang.
Für die in diesem Dokument enthaltenen Informationen übernehmen wir keine Gewähr.
Unsere Haftung, gleich aus welchem Rechtsgrund, für durch die Verwendung der in diesem Applikationsbeispiel beschriebenen Beispiele, Hinweise, Programme, Projektierungs- und Leistungsdaten usw. verursachte Schäden ist ausgeschlossen, soweit nicht z.B. nach dem Produkthaftungsgesetz in Fällen des Vorsatzes, der groben Fahrlässigkeit, wegen der Verletzung des Lebens, des Körpers oder der Gesundheit, wegen einer Übernahme der Garantie für die Beschaffenheit einer Sache, wegen des arglistigen Verschweigens eines Mangels oder wegen Verletzung wesentlicher Vertragspflichten zwingend gehaftet wird. Der Schadens-ersatz wegen Verletzung wesentlicher Vertragspflichten ist jedoch auf den vertragstypischen, vorhersehbaren Schaden begrenzt, soweit nicht Vorsatz oder grobe Fahrlässigkeit vorliegt oder wegen der Verletzung des Lebens, des Körpers oder der Gesundheit zwingend gehaftet wird. Eine Änderung der Beweislast zu Ihrem Nachteil ist hiermit nicht verbunden.
Weitergabe oder Vervielfältigung dieser Applikationsbeispiele oder Auszüge daraus sind nicht gestattet, soweit nicht ausdrücklich von Siemens Industry Sector zugestanden.
Inhaltsverzeichnis
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 5
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Inhaltsverzeichnis Gewährleistung und Haftung...................................................................................... 4 1 Automatisierungsaufgabe ................................................................................ 6
2 Automatisierungslösung .................................................................................. 9 2.1 Verdrahtungsplan ................................................................................. 9 2.2 Adressieren von Antrieben und Abschließen eines RS485-Busses mit
USS Protokoll ..................................................................................... 11 2.3 Aufbau des USS-Protokolls................................................................ 12 2.4 Kommunikation mit den Antrieben ..................................................... 14
3 Konfiguration ................................................................................................... 21 3.1 Hardware monierten und verdrahten ................................................. 21 3.2 S7-1200 mit PG/PC verbinden........................................................... 22 3.3 Projekt in die S7-1200 CPU1211C laden........................................... 23 3.4 Projekt in das SIMATIC Panel KTP600 laden.................................... 24 3.5 PC-Runtime anstelle des Panels verwenden..................................... 25 3.6 RS 485 Bus mit Abschlusswiderständen abschließen....................... 26 3.7 Parametrieren des Frequenzumrichters............................................. 26 3.7.1 SINAMICS G110/G120 ...................................................................... 26 3.7.2 SINAMICS S110................................................................................. 29 3.8 Bedienung der Applikation über HMI ................................................. 34 3.8.1 Bedeutung der Softkeys..................................................................... 34 3.8.2 Einschaltsperre deaktivieren und Antrieb freigeben .......................... 34 3.8.3 Sollwert und Richtung vorgeben ........................................................ 35 3.8.4 Freigabe entziehen, Motor stoppen ................................................... 36 3.8.5 Fehlermeldungen anzeigen, Fehler erzeugen ................................... 36 3.8.6 Parameter lesen/schreiben ................................................................ 38
6 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
1 Automatisierungsaufgabe
1.1 Applikative Automatisierungsaufgabe
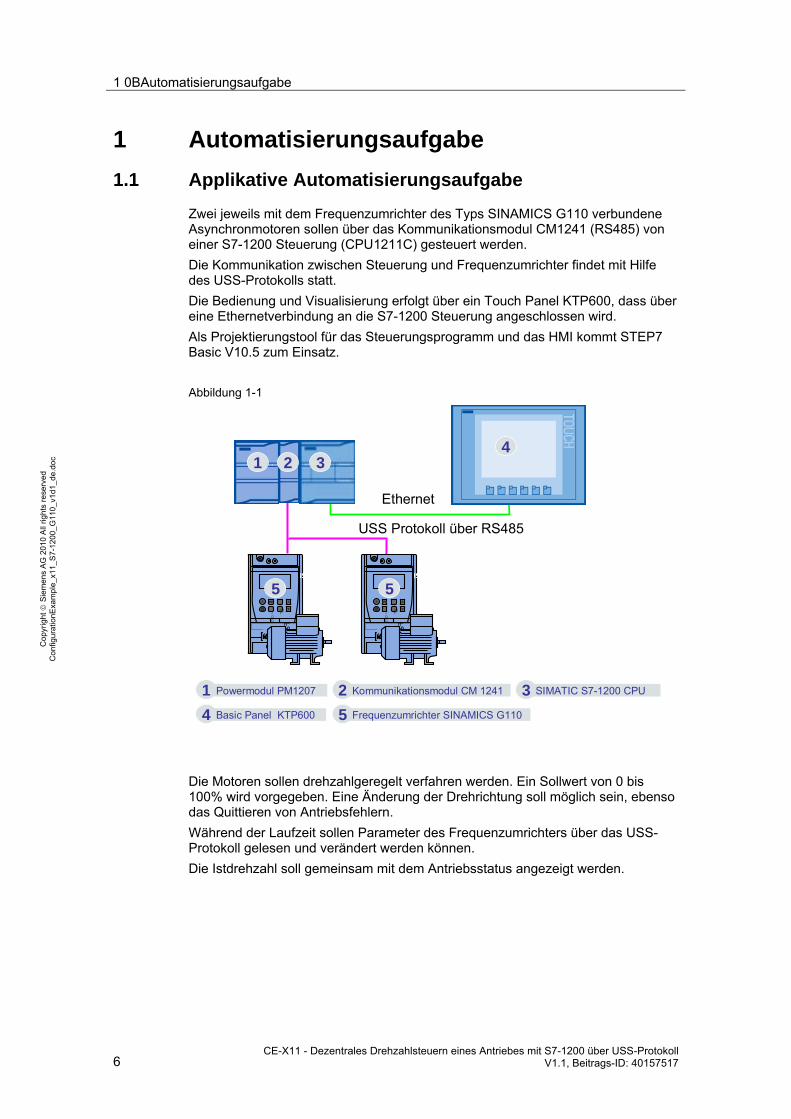
Zwei jeweils mit dem Frequenzumrichter des Typs SINAMICS G110 verbundene Asynchronmotoren sollen über das Kommunikationsmodul CM1241 (RS485) von einer S7-1200 Steuerung (CPU1211C) gesteuert werden.
Die Kommunikation zwischen Steuerung und Frequenzumrichter findet mit Hilfe des USS-Protokolls statt.
Die Bedienung und Visualisierung erfolgt über ein Touch Panel KTP600, dass über eine Ethernetverbindung an die S7-1200 Steuerung angeschlossen wird.
Als Projektierungstool für das Steuerungsprogramm und das HMI kommt STEP7 Basic V10.5 zum Einsatz.
Abbildung 1-1
1 Powermodul PM1207 2 Kommunikationsmodul CM 1241 3 SIMATIC S7-1200 CPU
Die Motoren sollen drehzahlgeregelt verfahren werden. Ein Sollwert von 0 bis 100% wird vorgegeben. Eine Änderung der Drehrichtung soll möglich sein, ebenso das Quittieren von Antriebsfehlern.
Während der Laufzeit sollen Parameter des Frequenzumrichters über das USS-Protokoll gelesen und verändert werden können.
Die Istdrehzahl soll gemeinsam mit dem Antriebsstatus angezeigt werden.
1 0BAutomatisierungsaufgabe
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 7
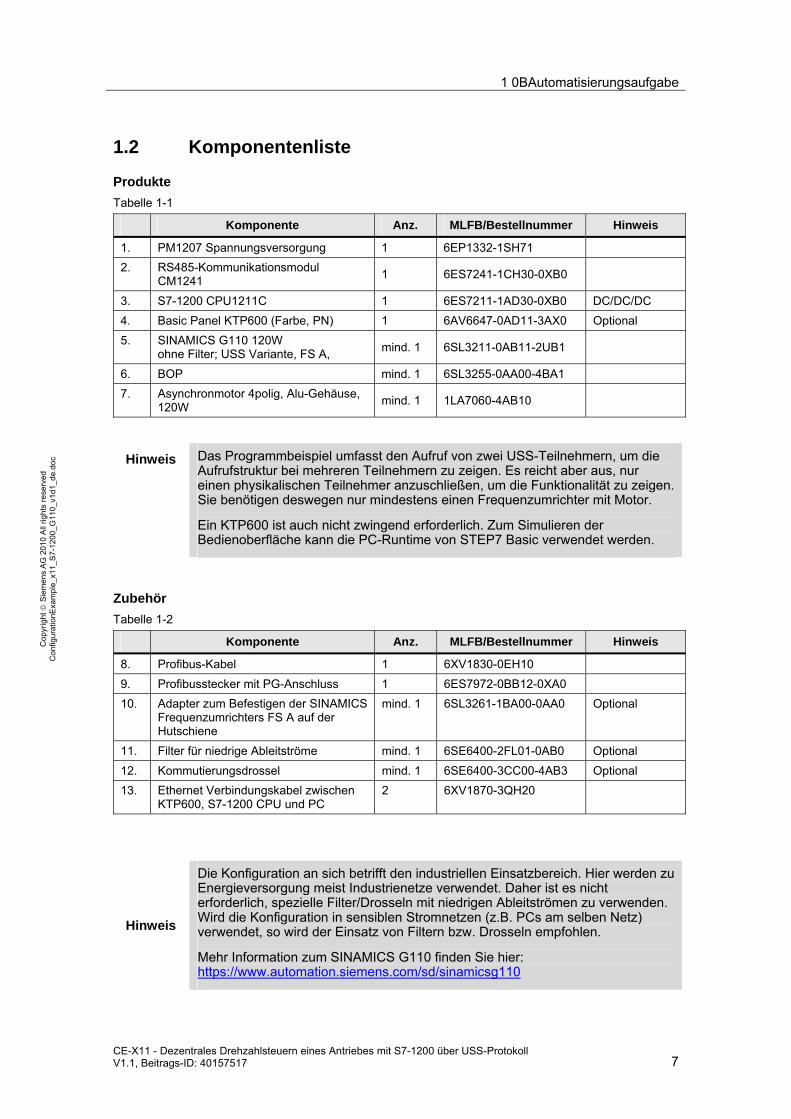
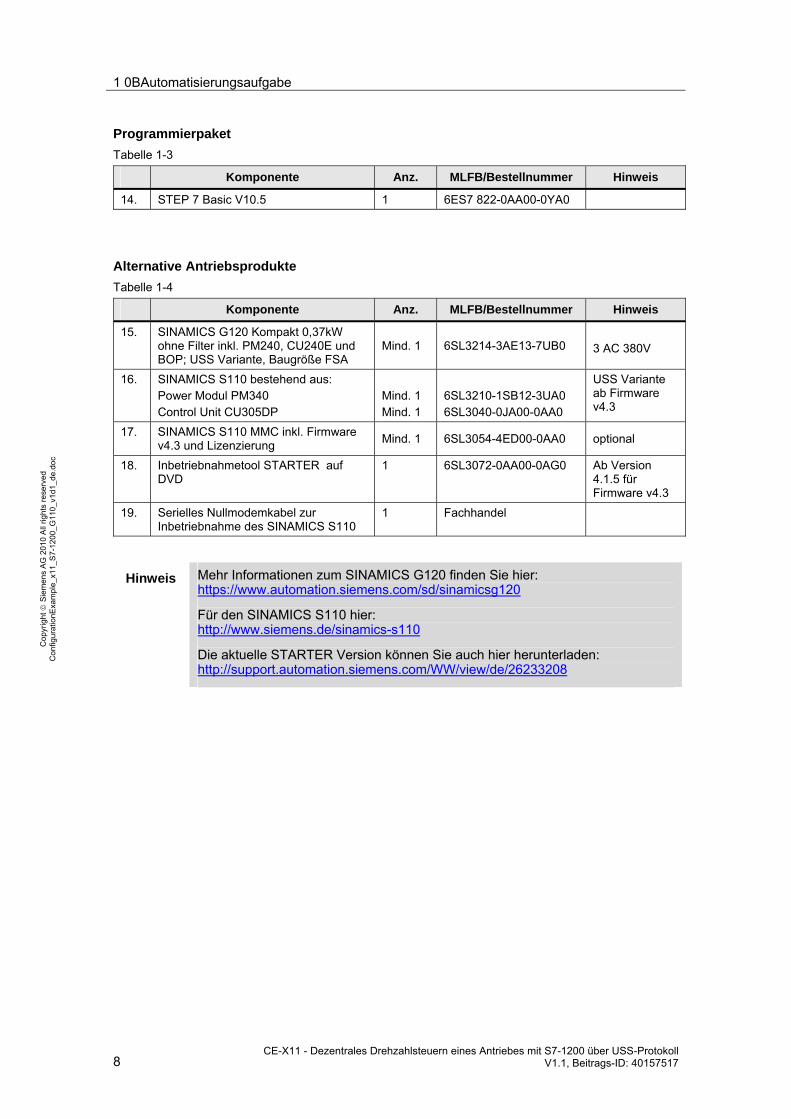
5. SINAMICS G110 120W ohne Filter; USS Variante, FS A,
mind. 1 6SL3211-0AB11-2UB1
6. BOP mind. 1 6SL3255-0AA00-4BA1
7. Asynchronmotor 4polig, Alu-Gehäuse, 120W
mind. 1 1LA7060-4AB10
Hinweis Das Programmbeispiel umfasst den Aufruf von zwei USS-Teilnehmern, um die Aufrufstruktur bei mehreren Teilnehmern zu zeigen. Es reicht aber aus, nur einen physikalischen Teilnehmer anzuschließen, um die Funktionalität zu zeigen. Sie benötigen deswegen nur mindestens einen Frequenzumrichter mit Motor.
Ein KTP600 ist auch nicht zwingend erforderlich. Zum Simulieren der Bedienoberfläche kann die PC-Runtime von STEP7 Basic verwendet werden.
Zubehör
Tabelle 1-2
Komponente Anz. MLFB/Bestellnummer Hinweis
8. Profibus-Kabel 1 6XV1830-0EH10
9. Profibusstecker mit PG-Anschluss 1 6ES7972-0BB12-0XA0
10. Adapter zum Befestigen der SINAMICS Frequenzumrichters FS A auf der Hutschiene
mind. 1 6SL3261-1BA00-0AA0 Optional
11. Filter für niedrige Ableitströme mind. 1 6SE6400-2FL01-0AB0 Optional
13. Ethernet Verbindungskabel zwischen KTP600, S7-1200 CPU und PC
2 6XV1870-3QH20
Hinweis
Die Konfiguration an sich betrifft den industriellen Einsatzbereich. Hier werden zu Energieversorgung meist Industrienetze verwendet. Daher ist es nicht erforderlich, spezielle Filter/Drosseln mit niedrigen Ableitströmen zu verwenden. Wird die Konfiguration in sensiblen Stromnetzen (z.B. PCs am selben Netz) verwendet, so wird der Einsatz von Filtern bzw. Drosseln empfohlen.
Mehr Information zum SINAMICS G110 finden Sie hier: https://www.automation.siemens.com/sd/sinamicsg110
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 9
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
2 Automatisierungslösung
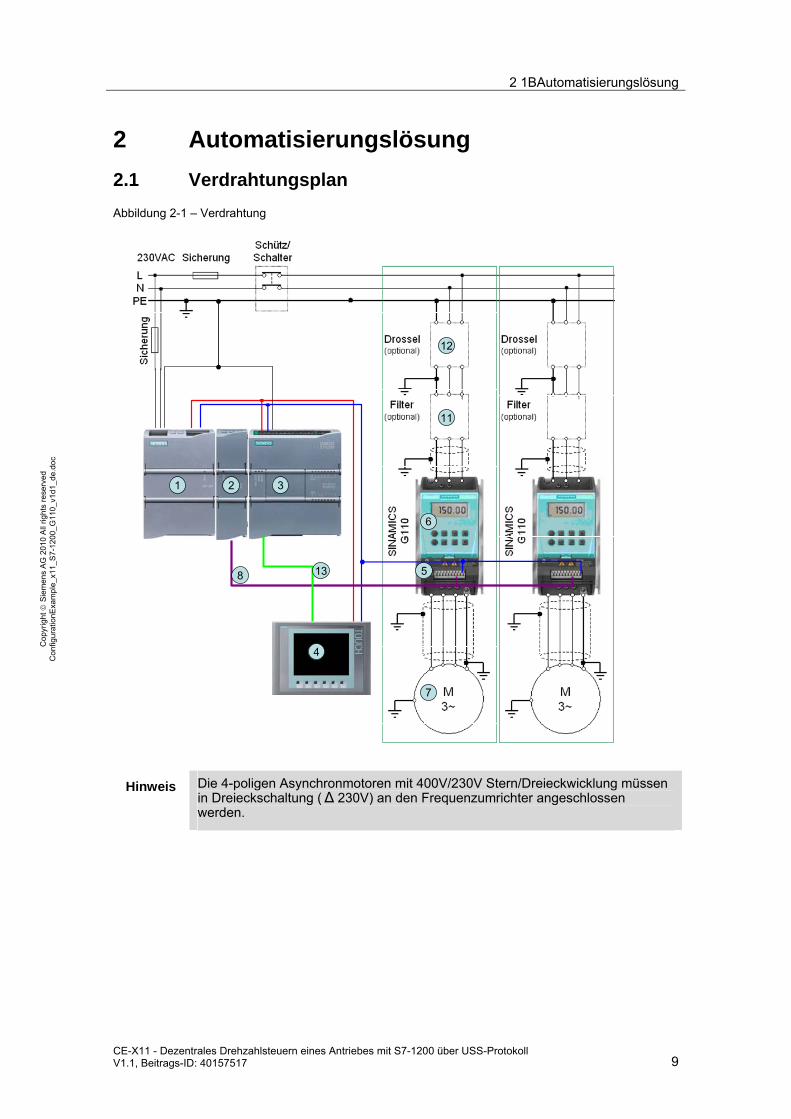
2.1 Verdrahtungsplan
Abbildung 2-1 – Verdrahtung
321
4
5
6
7
8
11
12
13
Hinweis Die 4-poligen Asynchronmotoren mit 400V/230V Stern/Dreieckwicklung müssen in Dreieckschaltung (Δ 230V) an den Frequenzumrichter angeschlossen werden.
2 1BAutomatisierungslösung
10 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
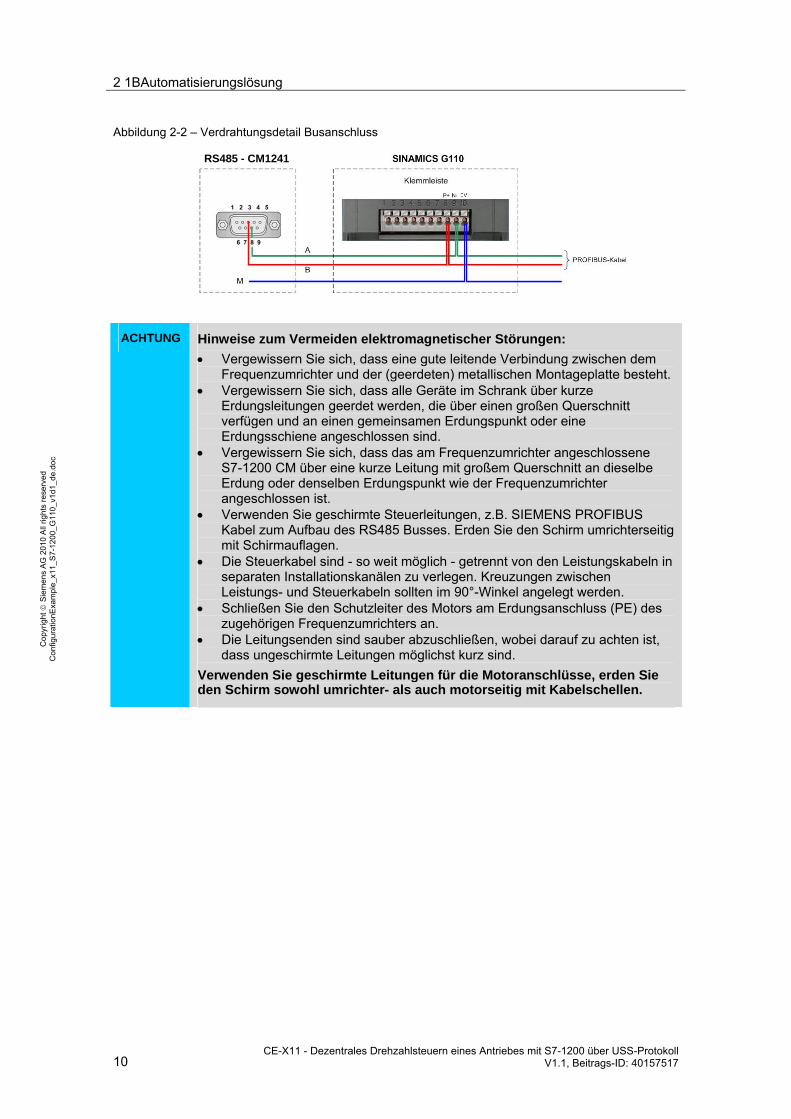
Abbildung 2-2 – Verdrahtungsdetail Busanschluss
RS485 - CM1241
ACHTUNG Hinweise zum Vermeiden elektromagnetischer Störungen:
Vergewissern Sie sich, dass eine gute leitende Verbindung zwischen dem Frequenzumrichter und der (geerdeten) metallischen Montageplatte besteht.
Vergewissern Sie sich, dass alle Geräte im Schrank über kurze Erdungsleitungen geerdet werden, die über einen großen Querschnitt verfügen und an einen gemeinsamen Erdungspunkt oder eine Erdungsschiene angeschlossen sind.
Vergewissern Sie sich, dass das am Frequenzumrichter angeschlossene S7-1200 CM über eine kurze Leitung mit großem Querschnitt an dieselbe Erdung oder denselben Erdungspunkt wie der Frequenzumrichter angeschlossen ist.
Verwenden Sie geschirmte Steuerleitungen, z.B. SIEMENS PROFIBUS Kabel zum Aufbau des RS485 Busses. Erden Sie den Schirm umrichterseitig mit Schirmauflagen.
Die Steuerkabel sind - so weit möglich - getrennt von den Leistungskabeln in separaten Installationskanälen zu verlegen. Kreuzungen zwischen Leistungs- und Steuerkabeln sollten im 90°-Winkel angelegt werden.
Schließen Sie den Schutzleiter des Motors am Erdungsanschluss (PE) des zugehörigen Frequenzumrichters an.
Die Leitungsenden sind sauber abzuschließen, wobei darauf zu achten ist, dass ungeschirmte Leitungen möglichst kurz sind.
Verwenden Sie geschirmte Leitungen für die Motoranschlüsse, erden Sie den Schirm sowohl umrichter- als auch motorseitig mit Kabelschellen.
2 1BAutomatisierungslösung
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 11
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
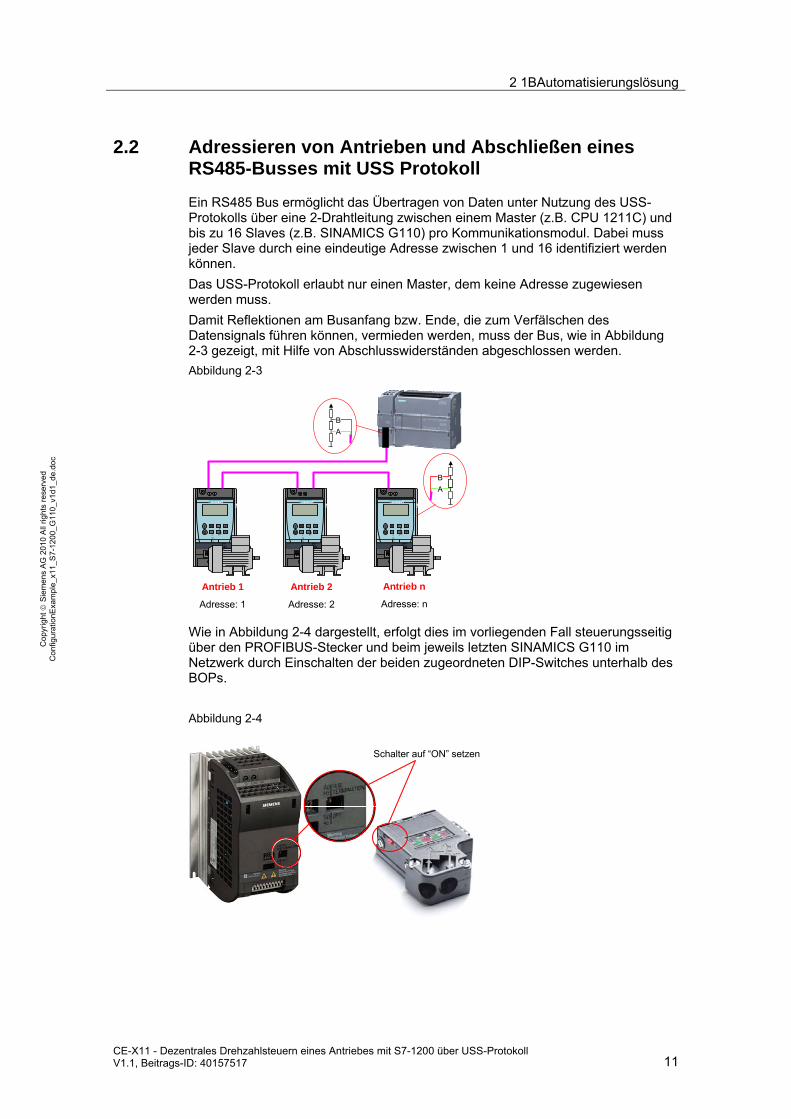
2.2 Adressieren von Antrieben und Abschließen eines RS485-Busses mit USS Protokoll
Ein RS485 Bus ermöglicht das Übertragen von Daten unter Nutzung des USS-Protokolls über eine 2-Drahtleitung zwischen einem Master (z.B. CPU 1211C) und bis zu 16 Slaves (z.B. SINAMICS G110) pro Kommunikationsmodul. Dabei muss jeder Slave durch eine eindeutige Adresse zwischen 1 und 16 identifiziert werden können.
Das USS-Protokoll erlaubt nur einen Master, dem keine Adresse zugewiesen werden muss.
Damit Reflektionen am Busanfang bzw. Ende, die zum Verfälschen des Datensignals führen können, vermieden werden, muss der Bus, wie in Abbildung 2-3 gezeigt, mit Hilfe von Abschlusswiderständen abgeschlossen werden.
Abbildung 2-3
s
60
BUS
Hz
50
OFF
Hz
12345678910
ON
1 2 3
P
FM
JOG
s
s
60
BUS
Hz
50
OFF
Hz
12345678910
ON
1 2 3
P
FM
JOG
s
s
60
BUS
Hz
50
OFF
Hz
12345678910
ON
1 2 3
P
FM
JOG
s
B
A
B
A
Antrieb 1 Antrieb nAntrieb 2
Adresse: 1 Adresse: nAdresse: 2
Wie in Abbildung 2-4 dargestellt, erfolgt dies im vorliegenden Fall steuerungsseitig über den PROFIBUS-Stecker und beim jeweils letzten SINAMICS G110 im Netzwerk durch Einschalten der beiden zugeordneten DIP-Switches unterhalb des BOPs.
Abbildung 2-4
Schalter auf “ON” setzen
2 1BAutomatisierungslösung
12 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
2.3 Aufbau des USS-Protokolls
Das USS-Protokoll wurde entwickelt, um auf einem RS485-Bus Prozessdaten zwischen einer zentralen Steuerung und Busteilnehmern (im folgenden Antrieb genannt) auszutauschen. Jeder Antrieb wird dabei durch eine einmalige Busadresse identifiziert.
Auch wenn der PROFIBUS dieselbe physikalische RS485-Technologie nutzt, unterscheidet sich das PROFIBUS- und USS-Protokoll erheblich.
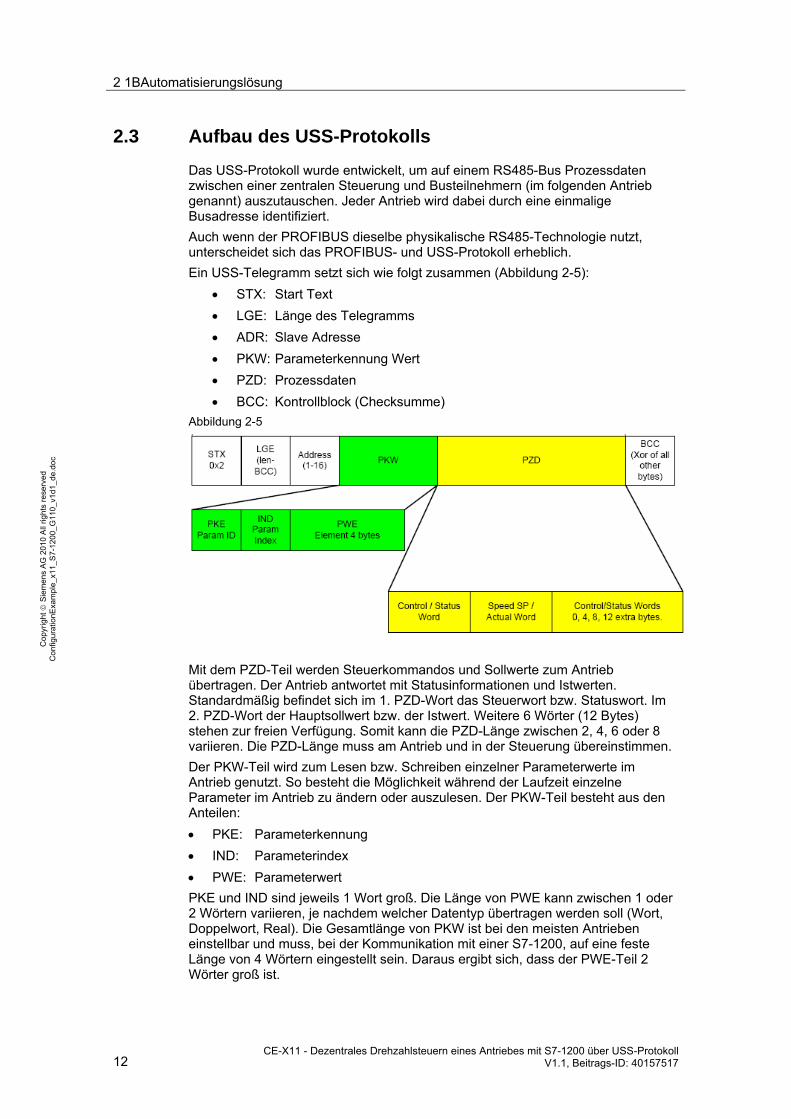
Ein USS-Telegramm setzt sich wie folgt zusammen (Abbildung 2-5):
STX: Start Text
LGE: Länge des Telegramms
ADR: Slave Adresse
PKW: Parameterkennung Wert
PZD: Prozessdaten
BCC: Kontrollblock (Checksumme)
Abbildung 2-5
Mit dem PZD-Teil werden Steuerkommandos und Sollwerte zum Antrieb übertragen. Der Antrieb antwortet mit Statusinformationen und Istwerten. Standardmäßig befindet sich im 1. PZD-Wort das Steuerwort bzw. Statuswort. Im 2. PZD-Wort der Hauptsollwert bzw. der Istwert. Weitere 6 Wörter (12 Bytes) stehen zur freien Verfügung. Somit kann die PZD-Länge zwischen 2, 4, 6 oder 8 variieren. Die PZD-Länge muss am Antrieb und in der Steuerung übereinstimmen.
Der PKW-Teil wird zum Lesen bzw. Schreiben einzelner Parameterwerte im Antrieb genutzt. So besteht die Möglichkeit während der Laufzeit einzelne Parameter im Antrieb zu ändern oder auszulesen. Der PKW-Teil besteht aus den Anteilen:
PKE: Parameterkennung
IND: Parameterindex
PWE: Parameterwert
PKE und IND sind jeweils 1 Wort groß. Die Länge von PWE kann zwischen 1 oder 2 Wörtern variieren, je nachdem welcher Datentyp übertragen werden soll (Wort, Doppelwort, Real). Die Gesamtlänge von PKW ist bei den meisten Antrieben einstellbar und muss, bei der Kommunikation mit einer S7-1200, auf eine feste Länge von 4 Wörtern eingestellt sein. Daraus ergibt sich, dass der PWE-Teil 2 Wörter groß ist.
2 1BAutomatisierungslösung
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 13
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Hinweis Weitere Informationen über das USS-Protokoll finden Sie unter folgendem Link:
14 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
2.4 Kommunikation mit den Antrieben
Das Kommunizieren der S7-1200 Steuerung über das Kommunikationsmodul mit den Antrieben erfolgt durch das Einbinden einer, im Lieferumfang von STEP7 Basic enthaltenen, Bibliothek.
Kommunizieren mit USS_PORT
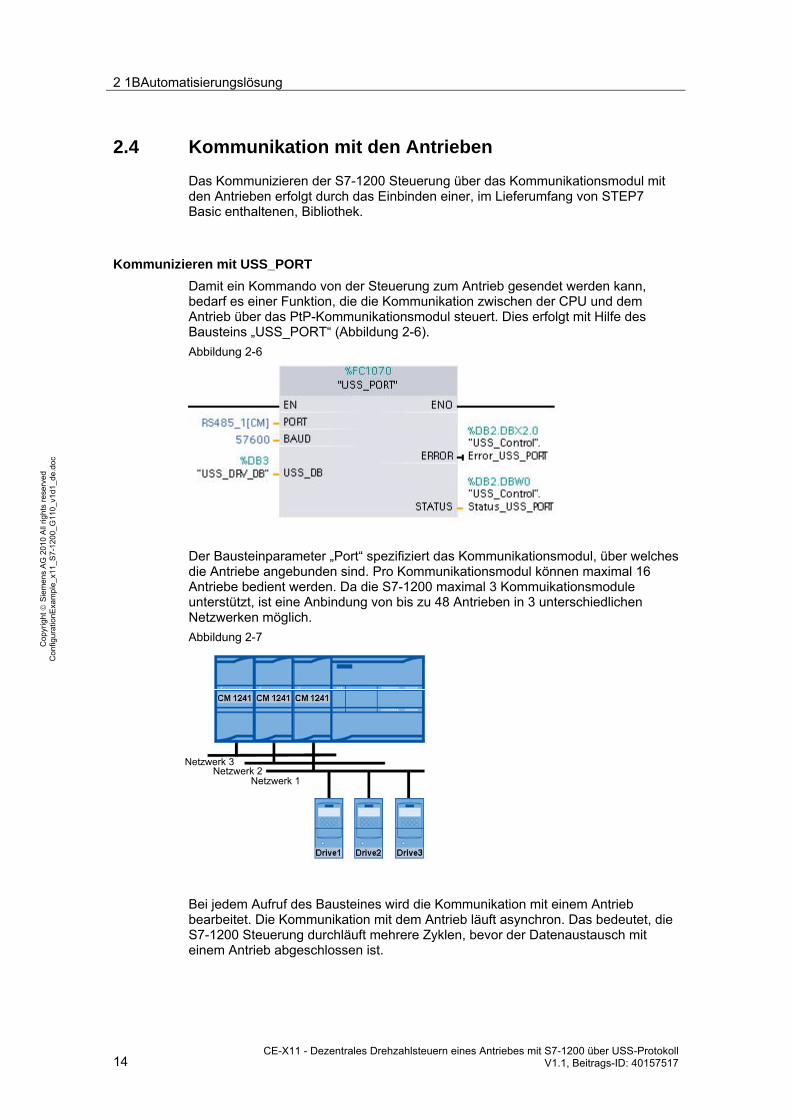
Damit ein Kommando von der Steuerung zum Antrieb gesendet werden kann, bedarf es einer Funktion, die die Kommunikation zwischen der CPU und dem Antrieb über das PtP-Kommunikationsmodul steuert. Dies erfolgt mit Hilfe des Bausteins „USS_PORT“ (Abbildung 2-6).
Abbildung 2-6
Der Bausteinparameter „Port“ spezifiziert das Kommunikationsmodul, über welches die Antriebe angebunden sind. Pro Kommunikationsmodul können maximal 16 Antriebe bedient werden. Da die S7-1200 maximal 3 Kommuikationsmodule unterstützt, ist eine Anbindung von bis zu 48 Antrieben in 3 unterschiedlichen Netzwerken möglich.
Abbildung 2-7
Netzwerk 3Netzwerk 2
Netzwerk 1
Bei jedem Aufruf des Bausteines wird die Kommunikation mit einem Antrieb bearbeitet. Die Kommunikation mit dem Antrieb läuft asynchron. Das bedeutet, die S7-1200 Steuerung durchläuft mehrere Zyklen, bevor der Datenaustausch mit einem Antrieb abgeschlossen ist.
2 1BAutomatisierungslösung
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 15
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Deswegen wird der Baustein „USS_PORT“ üblicherweise aus einem Verzögerungsalarm-OB im definierten Intervall aufgerufen. Das Aufrufintervall entspricht der Zeit, die für eine Transaktion mit einem Antrieb erforderlich ist.
Der Baustein kann auch zyklisch aufgerufen werden, dass allerdings nicht die Anzahl der Transaktionen erhöht. Kommt es zu einem Aufruf während der Baustein noch aktiv ist, wird der Aufruf ignoriert. Bei einer hohen Zykluszeit verlängert sich das Intervall zwischen den Aufrufen und es kann zu Kommunikationsabbrüchen kommen.
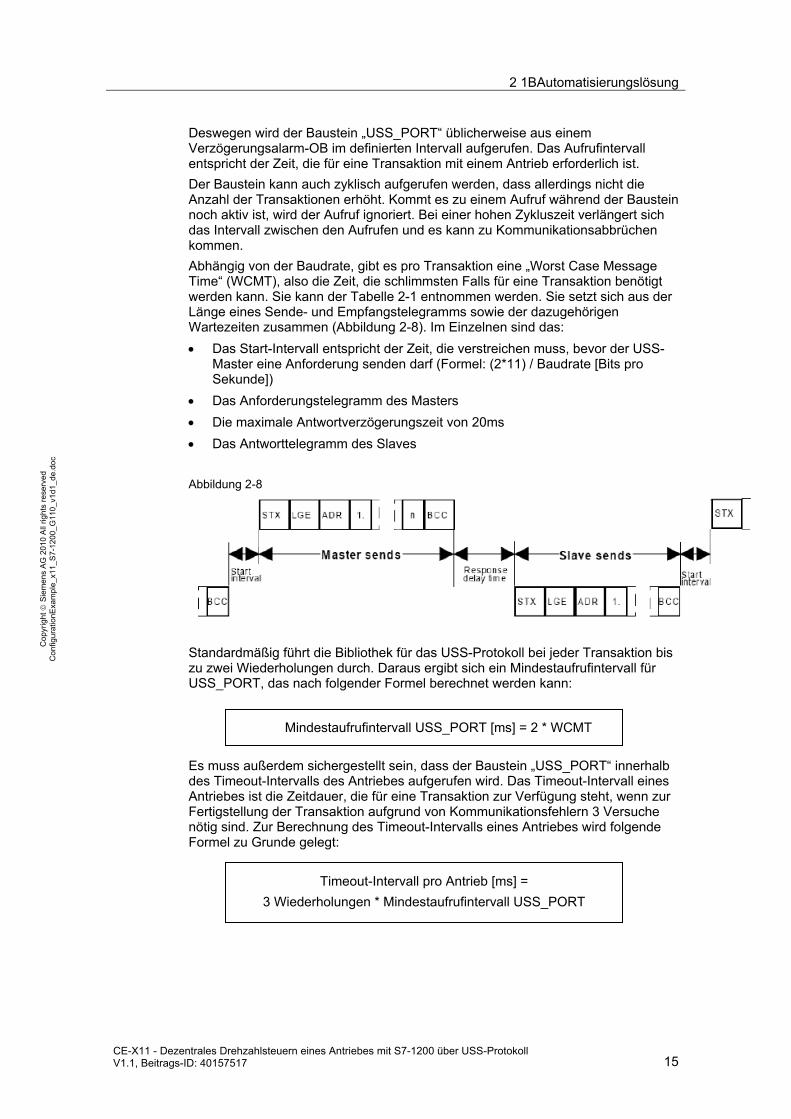
Abhängig von der Baudrate, gibt es pro Transaktion eine „Worst Case Message Time“ (WCMT), also die Zeit, die schlimmsten Falls für eine Transaktion benötigt werden kann. Sie kann der Tabelle 2-1 entnommen werden. Sie setzt sich aus der Länge eines Sende- und Empfangstelegramms sowie der dazugehörigen Wartezeiten zusammen (Abbildung 2-8). Im Einzelnen sind das:
Das Start-Intervall entspricht der Zeit, die verstreichen muss, bevor der USS-Master eine Anforderung senden darf (Formel: (2*11) / Baudrate [Bits pro Sekunde])
Das Anforderungstelegramm des Masters
Die maximale Antwortverzögerungszeit von 20ms
Das Antworttelegramm des Slaves
Abbildung 2-8
Standardmäßig führt die Bibliothek für das USS-Protokoll bei jeder Transaktion bis zu zwei Wiederholungen durch. Daraus ergibt sich ein Mindestaufrufintervall für USS_PORT, das nach folgender Formel berechnet werden kann:
Mindestaufrufintervall USS_PORT [ms] = 2 * WCMT
Es muss außerdem sichergestellt sein, dass der Baustein „USS_PORT“ innerhalb des Timeout-Intervalls des Antriebes aufgerufen wird. Das Timeout-Intervall eines Antriebes ist die Zeitdauer, die für eine Transaktion zur Verfügung steht, wenn zur Fertigstellung der Transaktion aufgrund von Kommunikationsfehlern 3 Versuche nötig sind. Zur Berechnung des Timeout-Intervalls eines Antriebes wird folgende Formel zu Grunde gelegt:
16 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
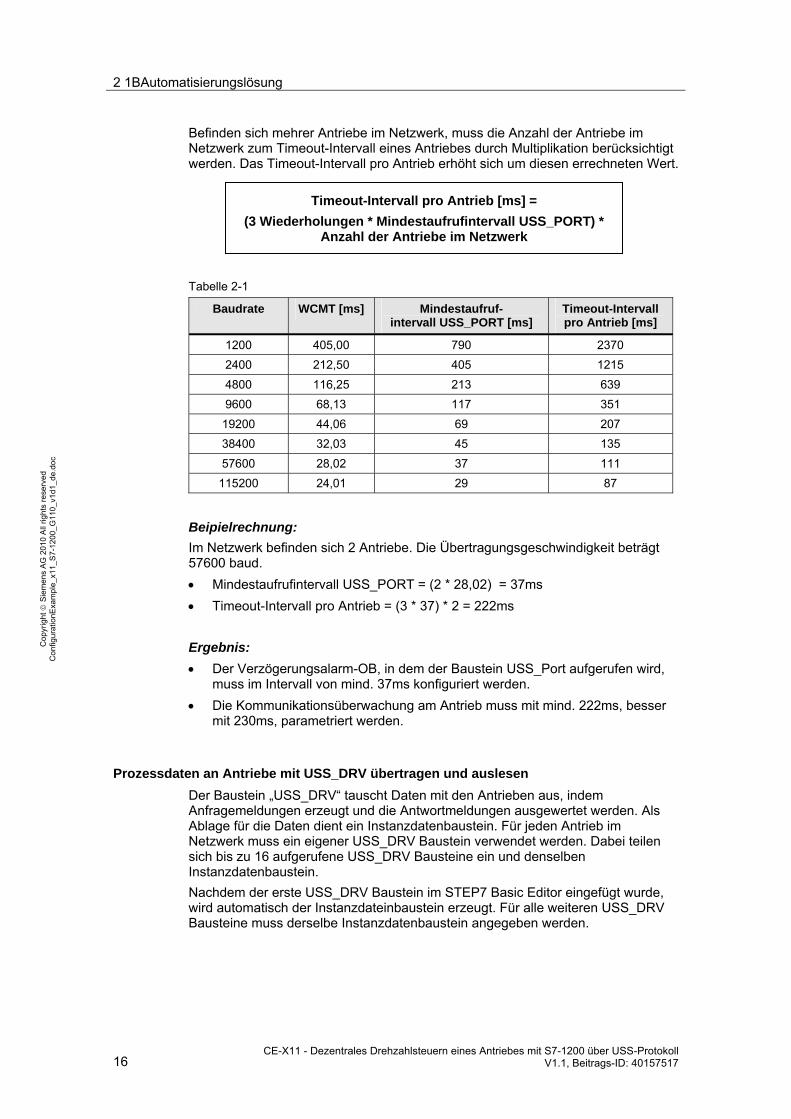
Befinden sich mehrer Antriebe im Netzwerk, muss die Anzahl der Antriebe im Netzwerk zum Timeout-Intervall eines Antriebes durch Multiplikation berücksichtigt werden. Das Timeout-Intervall pro Antrieb erhöht sich um diesen errechneten Wert.
Timeout-Intervall pro Antrieb [ms] =
(3 Wiederholungen * Mindestaufrufintervall USS_PORT) * Anzahl der Antriebe im Netzwerk
Ergebnis: Der Verzögerungsalarm-OB, in dem der Baustein USS_Port aufgerufen wird,
muss im Intervall von mind. 37ms konfiguriert werden.
Die Kommunikationsüberwachung am Antrieb muss mit mind. 222ms, besser mit 230ms, parametriert werden.
Prozessdaten an Antriebe mit USS_DRV übertragen und auslesen
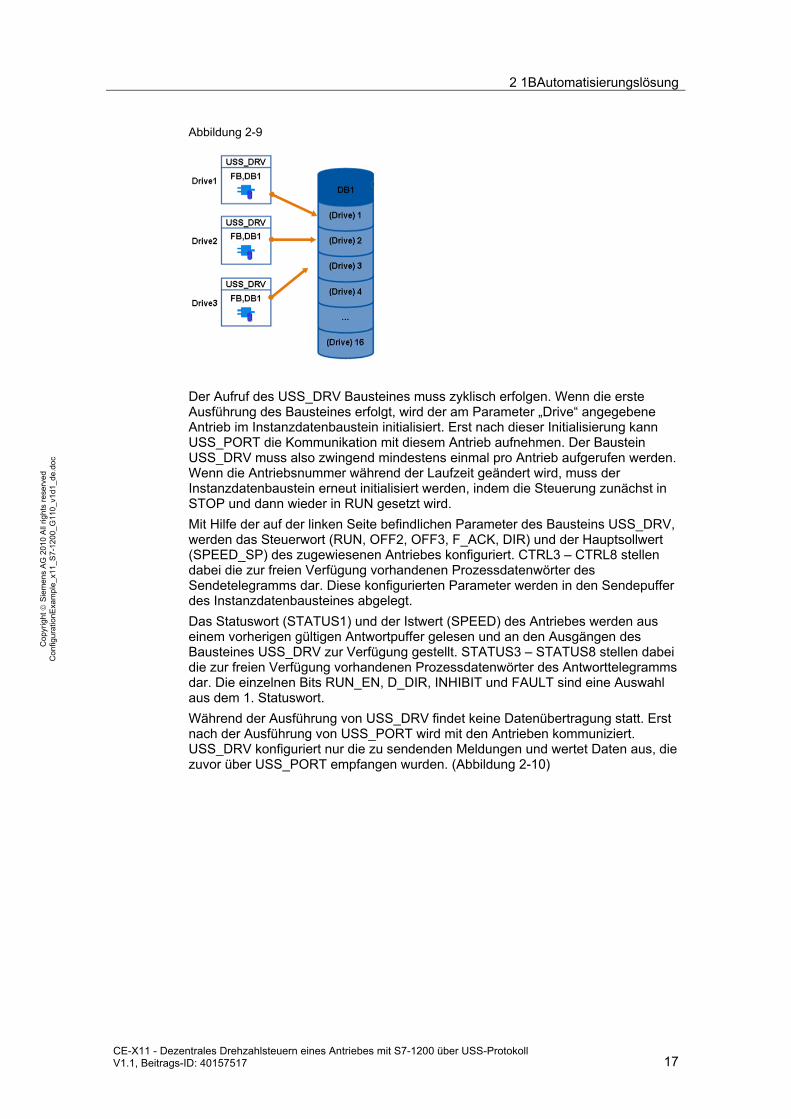
Der Baustein „USS_DRV“ tauscht Daten mit den Antrieben aus, indem Anfragemeldungen erzeugt und die Antwortmeldungen ausgewertet werden. Als Ablage für die Daten dient ein Instanzdatenbaustein. Für jeden Antrieb im Netzwerk muss ein eigener USS_DRV Baustein verwendet werden. Dabei teilen sich bis zu 16 aufgerufene USS_DRV Bausteine ein und denselben Instanzdatenbaustein.
Nachdem der erste USS_DRV Baustein im STEP7 Basic Editor eingefügt wurde, wird automatisch der Instanzdateinbaustein erzeugt. Für alle weiteren USS_DRV Bausteine muss derselbe Instanzdatenbaustein angegeben werden.
2 1BAutomatisierungslösung
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 17
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Abbildung 2-9
Der Aufruf des USS_DRV Bausteines muss zyklisch erfolgen. Wenn die erste Ausführung des Bausteines erfolgt, wird der am Parameter „Drive“ angegebene Antrieb im Instanzdatenbaustein initialisiert. Erst nach dieser Initialisierung kann USS_PORT die Kommunikation mit diesem Antrieb aufnehmen. Der Baustein USS_DRV muss also zwingend mindestens einmal pro Antrieb aufgerufen werden. Wenn die Antriebsnummer während der Laufzeit geändert wird, muss der Instanzdatenbaustein erneut initialisiert werden, indem die Steuerung zunächst in STOP und dann wieder in RUN gesetzt wird.
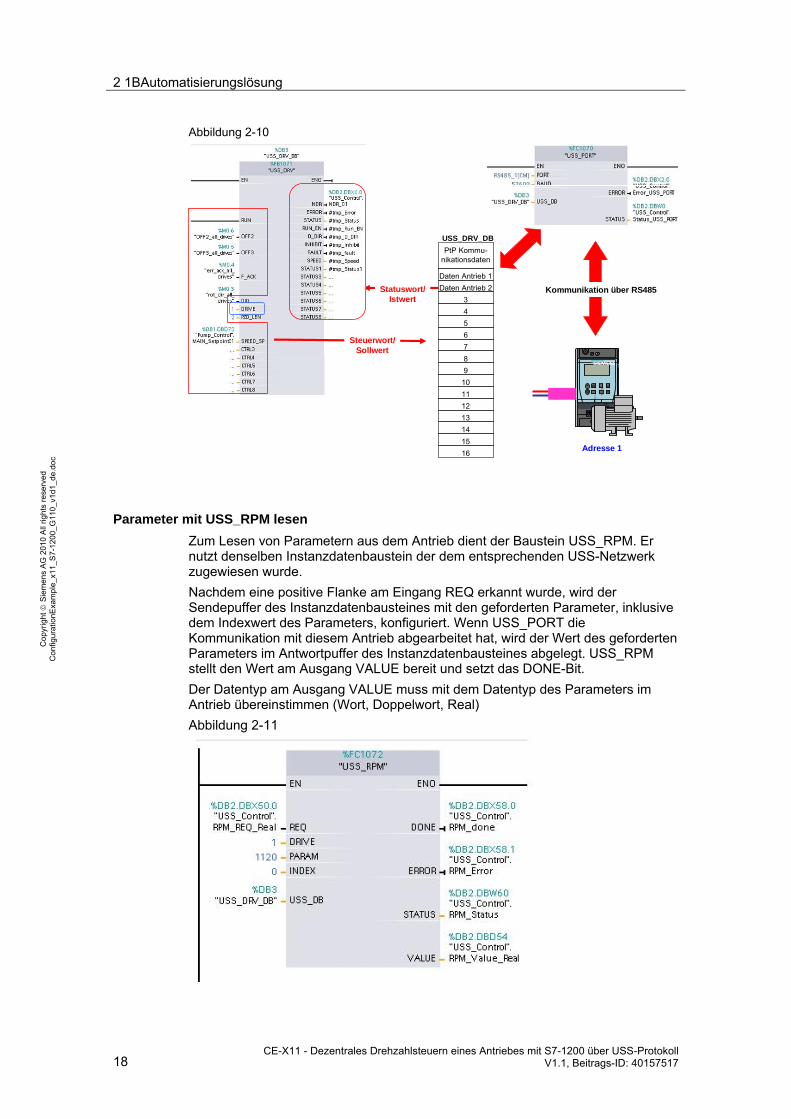
Mit Hilfe der auf der linken Seite befindlichen Parameter des Bausteins USS_DRV, werden das Steuerwort (RUN, OFF2, OFF3, F_ACK, DIR) und der Hauptsollwert (SPEED_SP) des zugewiesenen Antriebes konfiguriert. CTRL3 – CTRL8 stellen dabei die zur freien Verfügung vorhandenen Prozessdatenwörter des Sendetelegramms dar. Diese konfigurierten Parameter werden in den Sendepuffer des Instanzdatenbausteines abgelegt.
Das Statuswort (STATUS1) und der Istwert (SPEED) des Antriebes werden aus einem vorherigen gültigen Antwortpuffer gelesen und an den Ausgängen des Bausteines USS_DRV zur Verfügung gestellt. STATUS3 – STATUS8 stellen dabei die zur freien Verfügung vorhandenen Prozessdatenwörter des Antworttelegramms dar. Die einzelnen Bits RUN_EN, D_DIR, INHIBIT und FAULT sind eine Auswahl aus dem 1. Statuswort.
Während der Ausführung von USS_DRV findet keine Datenübertragung statt. Erst nach der Ausführung von USS_PORT wird mit den Antrieben kommuniziert. USS_DRV konfiguriert nur die zu sendenden Meldungen und wertet Daten aus, die zuvor über USS_PORT empfangen wurden. (Abbildung 2-10)
2 1BAutomatisierungslösung
18 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Abbildung 2-10
Statuswort/Istwert
Steuerwort/Sollwert
s
60
BUS
Hz5
0
OFF
Hz
12345678910
ON
1 2 3
P
FM
JOG
s
PtP Kommu-nikationsdaten
Daten Antrieb 1
Daten Antrieb 2
Adresse 1
3
4
5
6
7
8
9
10
11
12
13
14
15
16
USS_DRV_DB
Kommunikation über RS485
Parameter mit USS_RPM lesen
Zum Lesen von Parametern aus dem Antrieb dient der Baustein USS_RPM. Er nutzt denselben Instanzdatenbaustein der dem entsprechenden USS-Netzwerk zugewiesen wurde.
Nachdem eine positive Flanke am Eingang REQ erkannt wurde, wird der Sendepuffer des Instanzdatenbausteines mit den geforderten Parameter, inklusive dem Indexwert des Parameters, konfiguriert. Wenn USS_PORT die Kommunikation mit diesem Antrieb abgearbeitet hat, wird der Wert des geforderten Parameters im Antwortpuffer des Instanzdatenbausteines abgelegt. USS_RPM stellt den Wert am Ausgang VALUE bereit und setzt das DONE-Bit.
Der Datentyp am Ausgang VALUE muss mit dem Datentyp des Parameters im Antrieb übereinstimmen (Wort, Doppelwort, Real)
Abbildung 2-11
2 1BAutomatisierungslösung
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 19
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
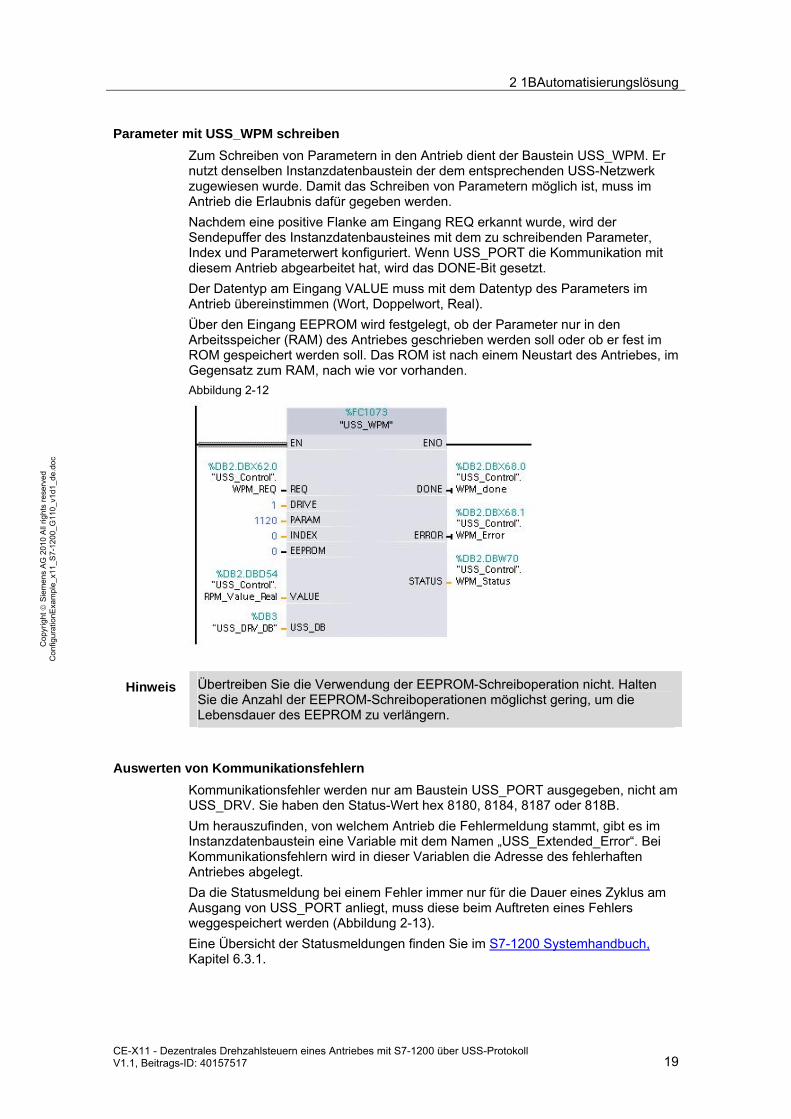
Parameter mit USS_WPM schreiben
Zum Schreiben von Parametern in den Antrieb dient der Baustein USS_WPM. Er nutzt denselben Instanzdatenbaustein der dem entsprechenden USS-Netzwerk zugewiesen wurde. Damit das Schreiben von Parametern möglich ist, muss im Antrieb die Erlaubnis dafür gegeben werden.
Nachdem eine positive Flanke am Eingang REQ erkannt wurde, wird der Sendepuffer des Instanzdatenbausteines mit dem zu schreibenden Parameter, Index und Parameterwert konfiguriert. Wenn USS_PORT die Kommunikation mit diesem Antrieb abgearbeitet hat, wird das DONE-Bit gesetzt.
Der Datentyp am Eingang VALUE muss mit dem Datentyp des Parameters im Antrieb übereinstimmen (Wort, Doppelwort, Real).
Über den Eingang EEPROM wird festgelegt, ob der Parameter nur in den Arbeitsspeicher (RAM) des Antriebes geschrieben werden soll oder ob er fest im ROM gespeichert werden soll. Das ROM ist nach einem Neustart des Antriebes, im Gegensatz zum RAM, nach wie vor vorhanden.
Abbildung 2-12
Hinweis Übertreiben Sie die Verwendung der EEPROM-Schreiboperation nicht. Halten Sie die Anzahl der EEPROM-Schreiboperationen möglichst gering, um die Lebensdauer des EEPROM zu verlängern.
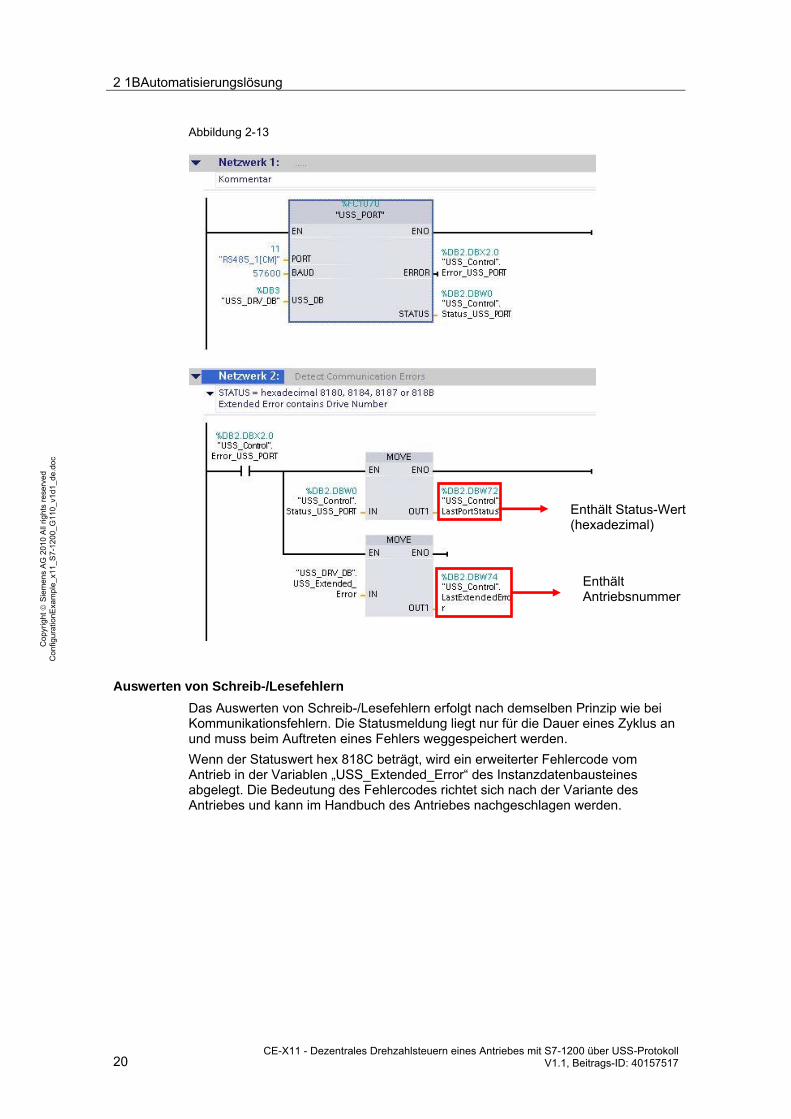
Auswerten von Kommunikationsfehlern
Kommunikationsfehler werden nur am Baustein USS_PORT ausgegeben, nicht am USS_DRV. Sie haben den Status-Wert hex 8180, 8184, 8187 oder 818B.
Um herauszufinden, von welchem Antrieb die Fehlermeldung stammt, gibt es im Instanzdatenbaustein eine Variable mit dem Namen „USS_Extended_Error“. Bei Kommunikationsfehlern wird in dieser Variablen die Adresse des fehlerhaften Antriebes abgelegt.
Da die Statusmeldung bei einem Fehler immer nur für die Dauer eines Zyklus am Ausgang von USS_PORT anliegt, muss diese beim Auftreten eines Fehlers weggespeichert werden (Abbildung 2-13).
Eine Übersicht der Statusmeldungen finden Sie im S7-1200 Systemhandbuch, Kapitel 6.3.1.
20 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Abbildung 2-13
Enthält Status-Wert (hexadezimal)
Enthält Antriebsnummer
Auswerten von Schreib-/Lesefehlern
Das Auswerten von Schreib-/Lesefehlern erfolgt nach demselben Prinzip wie bei Kommunikationsfehlern. Die Statusmeldung liegt nur für die Dauer eines Zyklus an und muss beim Auftreten eines Fehlers weggespeichert werden.
Wenn der Statuswert hex 818C beträgt, wird ein erweiterter Fehlercode vom Antrieb in der Variablen „USS_Extended_Error“ des Instanzdatenbausteines abgelegt. Die Bedeutung des Fehlercodes richtet sich nach der Variante des Antriebes und kann im Handbuch des Antriebes nachgeschlagen werden.
3 2BKonfiguration
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 21
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
3 Konfiguration
3.1 Hardware monierten und verdrahten
Tabelle 3-1
Nr. Aktion Anmerkung/Bild
1. Montieren Sie
die Sicherung
das Netzteil PM 1207
die S7-1200 CPU 1211C
das CM1241
und die Frequenzumrichter auf eine Hutschiene.
2. Montieren Sie die Motoren auf eine geeignete Vorrichtung.
3. Verbinden Sie die Steuerung mit der DC 24V Versorgungsspannung des PM 1207
Siehe Abbildung 2-1
4. Verbinden Sie die Frequenzumrichter mit den Motoren.
Siehe Abbildung 2-1
5. Verbinden Sie das PROFIBUS-Kabel mit dem S7-1200 CM1241 und den Frequenzumrichtern
Siehe Abbildung 2-2
6. Verbinden Sie alle Erdungsanschlüsse mit Erde.
Hinweis An dieser Stelle wird davon ausgegangen, dass die notwendige Software auf Ihrem Rechner installiert ist und Sie im grundlegenden Umgang mit der Software vertraut sind.
!
WARNUNG
Bitte lesen Sie vor der Installation und Inbetriebnahme des Frequenzumrichters alle Sicherheits- und Warnhinweise in der Bedienungsanleitung des Frequenzumrichters sorgfältig durch, ebenso alle am Gerät angebrachten Warnschilder. Bitte achten Sie darauf, dass die Warnschilder in einem leserlichen Zustand gehalten und nicht entfernt werden.
3 2BKonfiguration
22 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
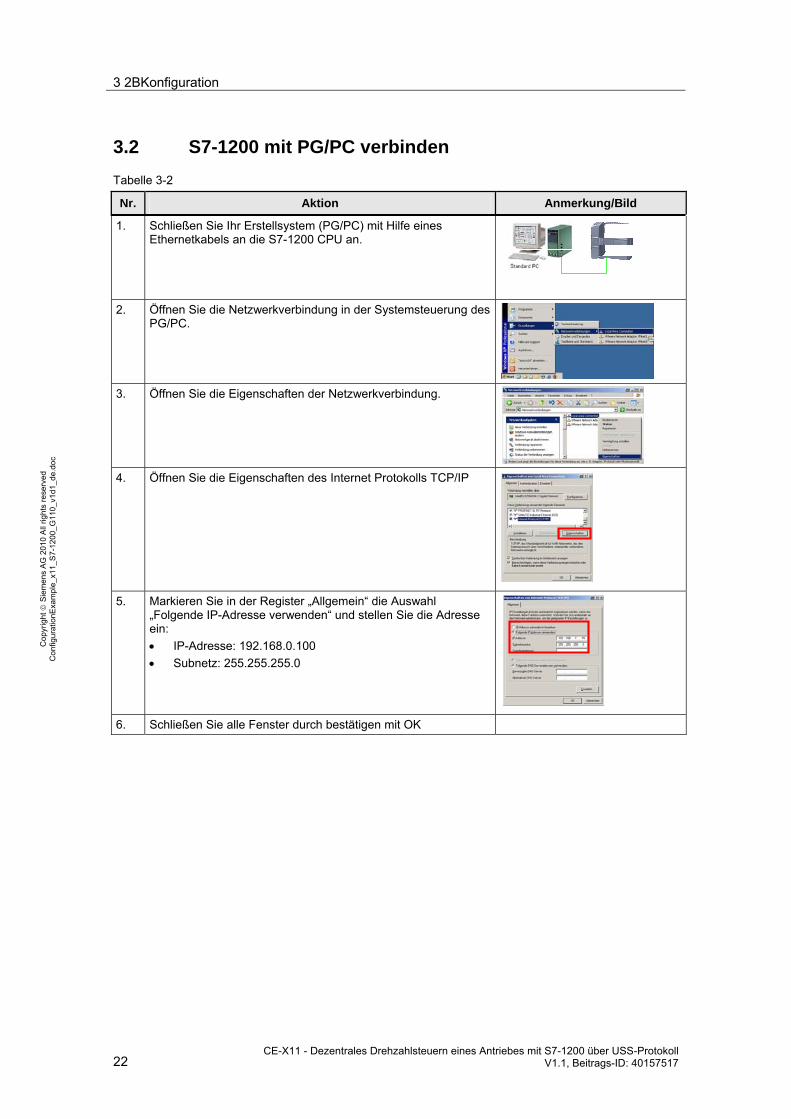
3.2 S7-1200 mit PG/PC verbinden
Tabelle 3-2
Nr. Aktion Anmerkung/Bild
1. Schließen Sie Ihr Erstellsystem (PG/PC) mit Hilfe eines Ethernetkabels an die S7-1200 CPU an.
2. Öffnen Sie die Netzwerkverbindung in der Systemsteuerung des PG/PC.
3. Öffnen Sie die Eigenschaften der Netzwerkverbindung.
4. Öffnen Sie die Eigenschaften des Internet Protokolls TCP/IP
5. Markieren Sie in der Register „Allgemein“ die Auswahl „Folgende IP-Adresse verwenden“ und stellen Sie die Adresse ein:
IP-Adresse: 192.168.0.100
Subnetz: 255.255.255.0
6. Schließen Sie alle Fenster durch bestätigen mit OK
3 2BKonfiguration
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 23
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
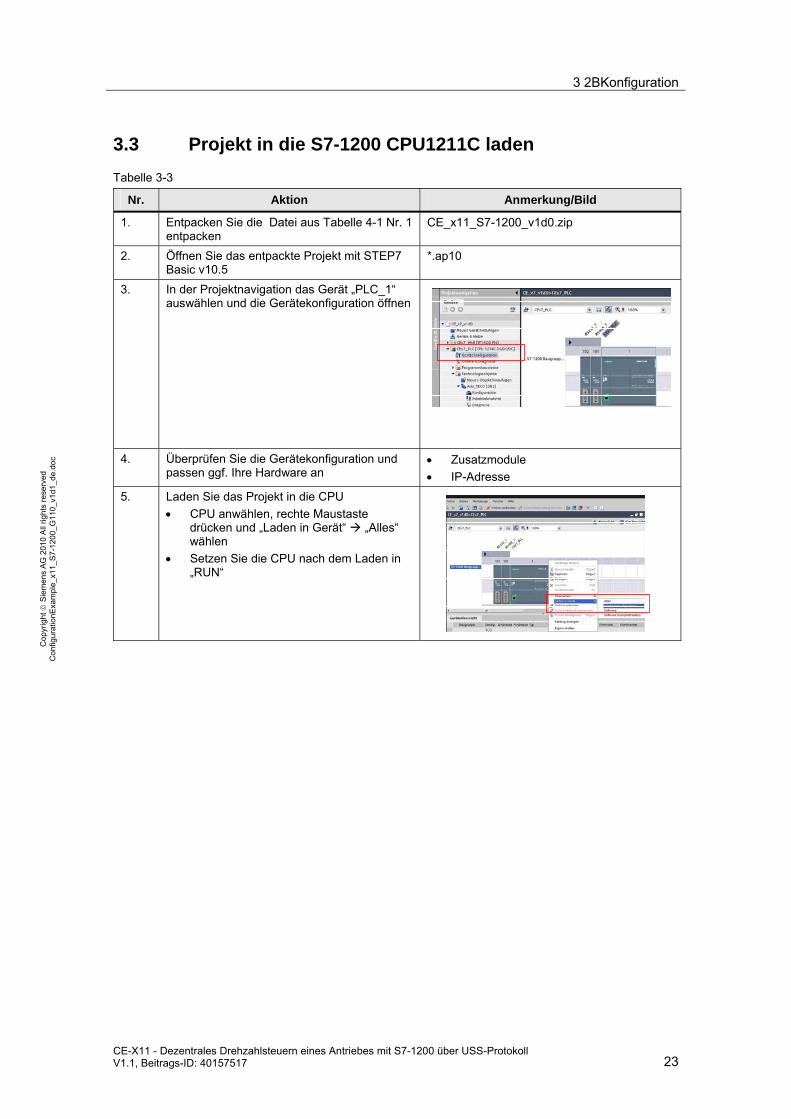
3.3 Projekt in die S7-1200 CPU1211C laden
Tabelle 3-3
Nr. Aktion Anmerkung/Bild
1. Entpacken Sie die Datei aus Tabelle 4-1 Nr. 1 entpacken
CE_x11_S7-1200_v1d0.zip
2. Öffnen Sie das entpackte Projekt mit STEP7 Basic v10.5
*.ap10
3. In der Projektnavigation das Gerät „PLC_1“ auswählen und die Gerätekonfiguration öffnen
4. Überprüfen Sie die Gerätekonfiguration und passen ggf. Ihre Hardware an
Zusatzmodule
IP-Adresse
5. Laden Sie das Projekt in die CPU
CPU anwählen, rechte Maustaste drücken und „Laden in Gerät“ „Alles“ wählen
Setzen Sie die CPU nach dem Laden in „RUN“
3 2BKonfiguration
24 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
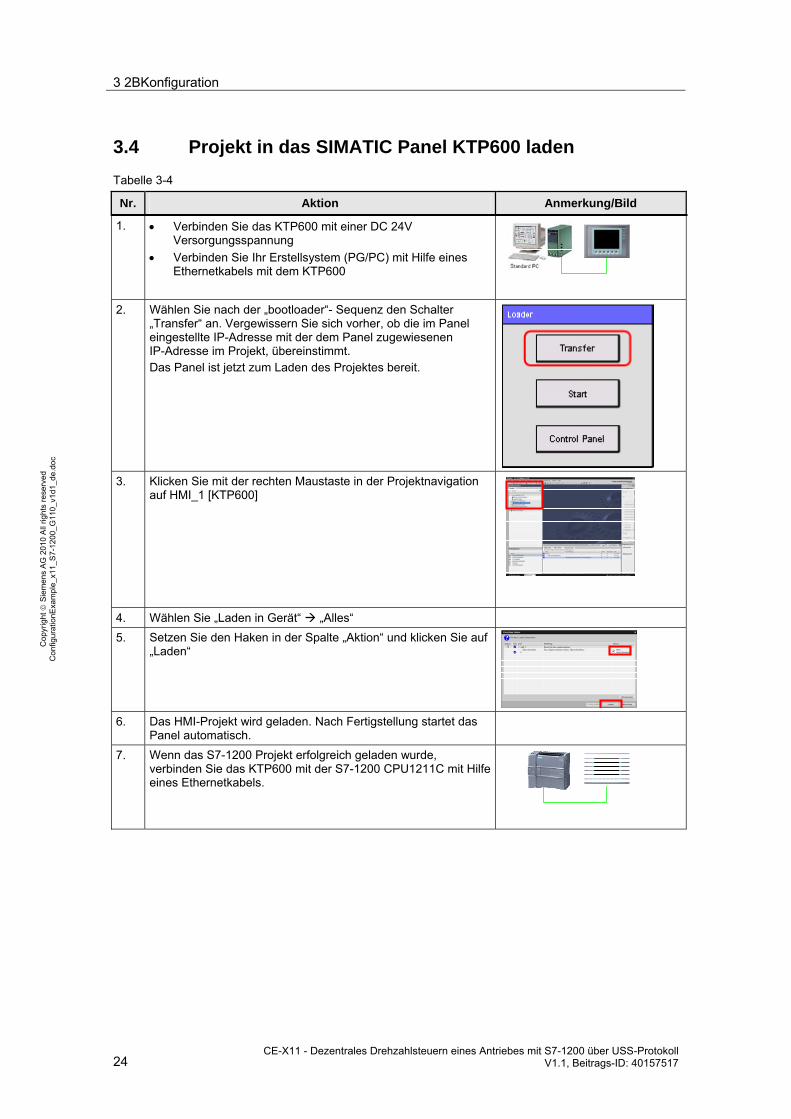
3.4 Projekt in das SIMATIC Panel KTP600 laden
Tabelle 3-4
Nr. Aktion Anmerkung/Bild
1. Verbinden Sie das KTP600 mit einer DC 24V Versorgungsspannung
Verbinden Sie Ihr Erstellsystem (PG/PC) mit Hilfe eines Ethernetkabels mit dem KTP600
2. Wählen Sie nach der „bootloader“- Sequenz den Schalter „Transfer“ an. Vergewissern Sie sich vorher, ob die im Panel eingestellte IP-Adresse mit der dem Panel zugewiesenen IP-Adresse im Projekt, übereinstimmt. Das Panel ist jetzt zum Laden des Projektes bereit.
3. Klicken Sie mit der rechten Maustaste in der Projektnavigation auf HMI_1 [KTP600]
4. Wählen Sie „Laden in Gerät“ „Alles“
5. Setzen Sie den Haken in der Spalte „Aktion“ und klicken Sie auf „Laden“
6. Das HMI-Projekt wird geladen. Nach Fertigstellung startet das Panel automatisch.
7. Wenn das S7-1200 Projekt erfolgreich geladen wurde, verbinden Sie das KTP600 mit der S7-1200 CPU1211C mit Hilfe eines Ethernetkabels.
3 2BKonfiguration
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 25
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
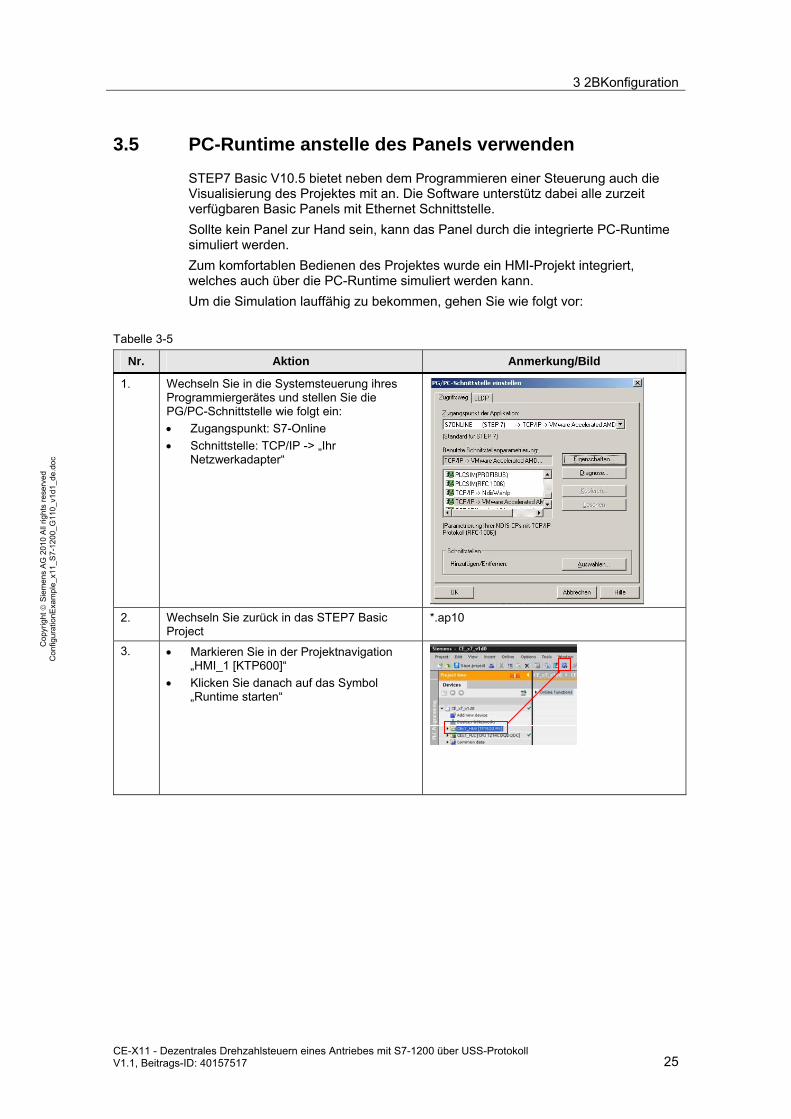
3.5 PC-Runtime anstelle des Panels verwenden
STEP7 Basic V10.5 bietet neben dem Programmieren einer Steuerung auch die Visualisierung des Projektes mit an. Die Software unterstütz dabei alle zurzeit verfügbaren Basic Panels mit Ethernet Schnittstelle.
Sollte kein Panel zur Hand sein, kann das Panel durch die integrierte PC-Runtime simuliert werden.
Zum komfortablen Bedienen des Projektes wurde ein HMI-Projekt integriert, welches auch über die PC-Runtime simuliert werden kann.
Um die Simulation lauffähig zu bekommen, gehen Sie wie folgt vor:
Tabelle 3-5
Nr. Aktion Anmerkung/Bild
1. Wechseln Sie in die Systemsteuerung ihres Programmiergerätes und stellen Sie die PG/PC-Schnittstelle wie folgt ein:
Zugangspunkt: S7-Online
Schnittstelle: TCP/IP -> „Ihr Netzwerkadapter“
2. Wechseln Sie zurück in das STEP7 Basic Project
*.ap10
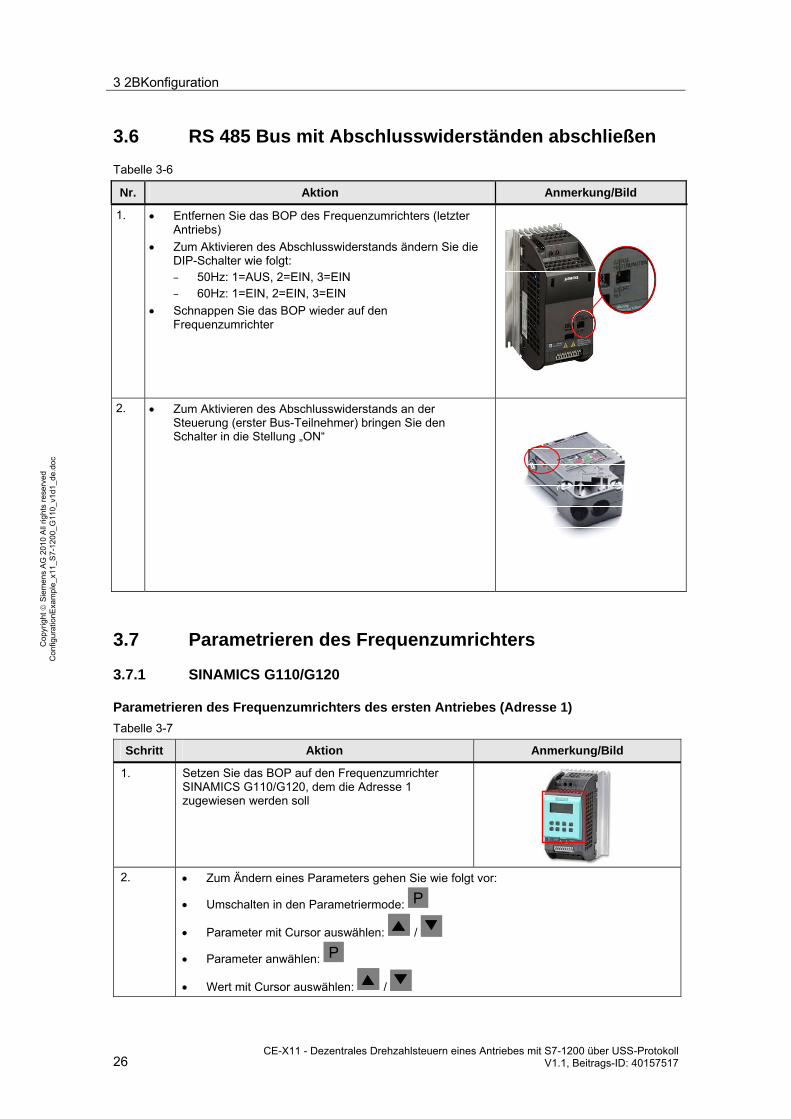
3. Markieren Sie in der Projektnavigation „HMI_1 [KTP600]“
Klicken Sie danach auf das Symbol „Runtime starten“
3 2BKonfiguration
26 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
3.6 RS 485 Bus mit Abschlusswiderständen abschließen
Tabelle 3-6
Nr. Aktion Anmerkung/Bild
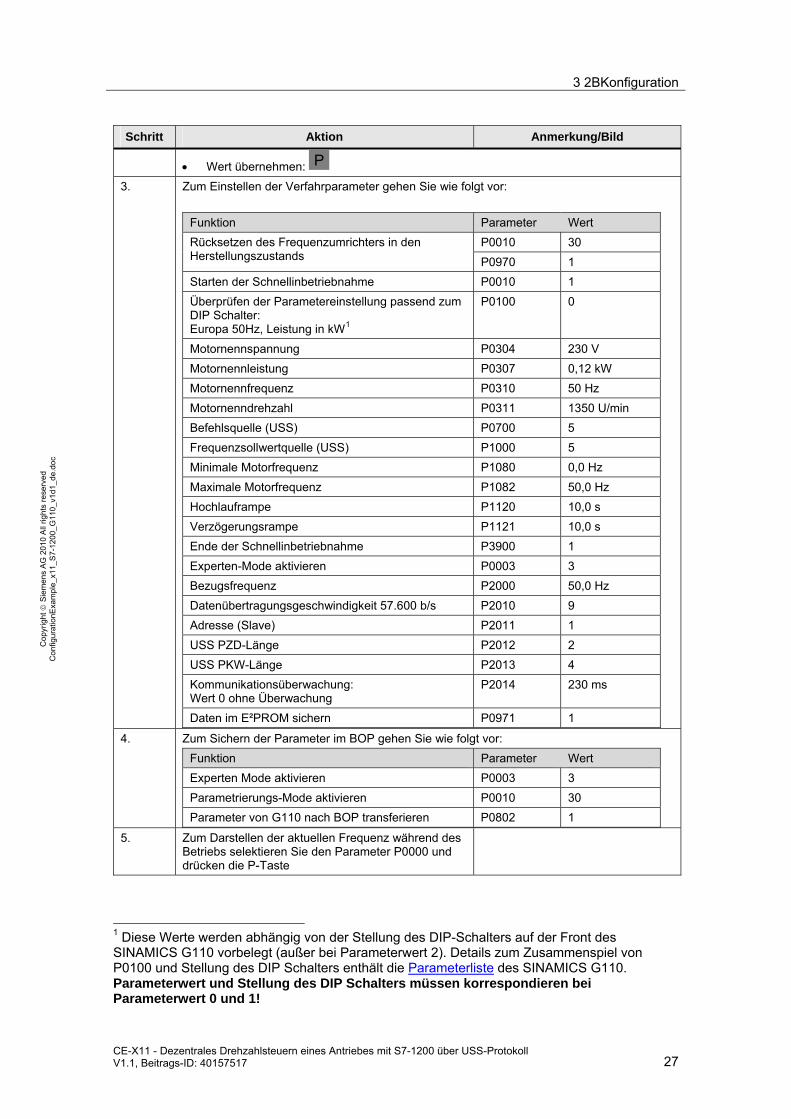
1. Entfernen Sie das BOP des Frequenzumrichters (letzter Antriebs)
Zum Aktivieren des Abschlusswiderstands ändern Sie die DIP-Schalter wie folgt: – 50Hz: 1=AUS, 2=EIN, 3=EIN – 60Hz: 1=EIN, 2=EIN, 3=EIN
Schnappen Sie das BOP wieder auf den Frequenzumrichter
2. Zum Aktivieren des Abschlusswiderstands an der Steuerung (erster Bus-Teilnehmer) bringen Sie den Schalter in die Stellung „ON“
3.7 Parametrieren des Frequenzumrichters
3.7.1 SINAMICS G110/G120
Parametrieren des Frequenzumrichters des ersten Antriebes (Adresse 1)
Tabelle 3-7
Schritt Aktion Anmerkung/Bild
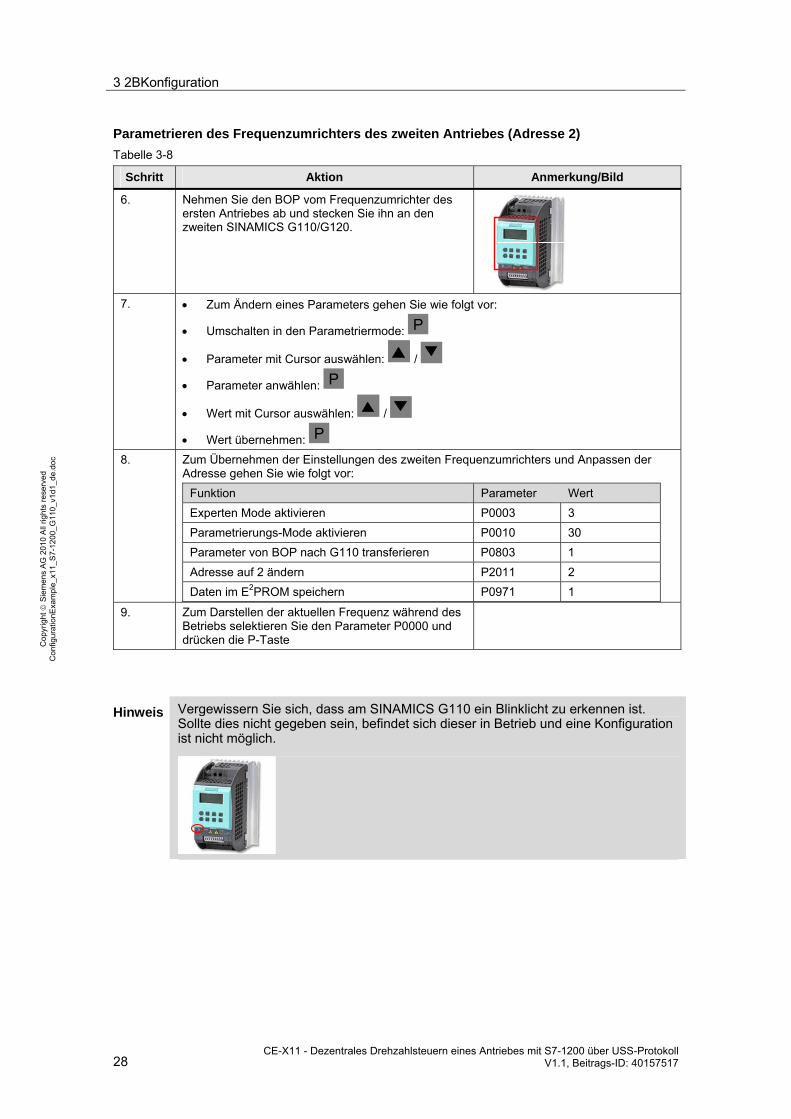
1. Setzen Sie das BOP auf den Frequenzumrichter SINAMICS G110/G120, dem die Adresse 1 zugewiesen werden soll
2. Zum Ändern eines Parameters gehen Sie wie folgt vor:
Umschalten in den Parametriermode:
Parameter mit Cursor auswählen: /
Parameter anwählen:
Wert mit Cursor auswählen: /
P
P
3 2BKonfiguration
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 27
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Schritt Aktion Anmerkung/Bild
Wert übernehmen:
3. Zum Einstellen der Verfahrparameter gehen Sie wie folgt vor:
Funktion Parameter Wert
P0010 30 Rücksetzen des Frequenzumrichters in den Herstellungszustands P0970 1
Starten der Schnellinbetriebnahme P0010 1
Überprüfen der Parametereinstellung passend zum DIP Schalter: Europa 50Hz, Leistung in kW1
Kommunikationsüberwachung: Wert 0 ohne Überwachung
P2014 230 ms
Daten im E²PROM sichern P0971 1 4. Zum Sichern der Parameter im BOP gehen Sie wie folgt vor:
Funktion Parameter Wert
Experten Mode aktivieren P0003 3
Parametrierungs-Mode aktivieren P0010 30
Parameter von G110 nach BOP transferieren P0802 1 5. Zum Darstellen der aktuellen Frequenz während des
Betriebs selektieren Sie den Parameter P0000 und drücken die P-Taste
P
1 Diese Werte werden abhängig von der Stellung des DIP-Schalters auf der Front des SINAMICS G110 vorbelegt (außer bei Parameterwert 2). Details zum Zusammenspiel von P0100 und Stellung des DIP Schalters enthält die Parameterliste des SINAMICS G110. Parameterwert und Stellung des DIP Schalters müssen korrespondieren bei Parameterwert 0 und 1!
28 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Parametrieren des Frequenzumrichters des zweiten Antriebes (Adresse 2)
Tabelle 3-8
Schritt Aktion Anmerkung/Bild
6. Nehmen Sie den BOP vom Frequenzumrichter des ersten Antriebes ab und stecken Sie ihn an den zweiten SINAMICS G110/G120.
7. Zum Ändern eines Parameters gehen Sie wie folgt vor:
Umschalten in den Parametriermode:
Parameter mit Cursor auswählen: /
Parameter anwählen:
Wert mit Cursor auswählen: /
Wert übernehmen:
8. Zum Übernehmen der Einstellungen des zweiten Frequenzumrichters und Anpassen der Adresse gehen Sie wie folgt vor:
Funktion Parameter Wert
Experten Mode aktivieren P0003 3
Parametrierungs-Mode aktivieren P0010 30
Parameter von BOP nach G110 transferieren P0803 1
Adresse auf 2 ändern P2011 2
Daten im E PROM speichern 2 P0971 1 9. Zum Darstellen der aktuellen Frequenz während des
Betriebs selektieren Sie den Parameter P0000 und drücken die P-Taste
P
P
P
Hinweis Vergewissern Sie sich, dass am SINAMICS G110 ein Blinklicht zu erkennen ist. Sollte dies nicht gegeben sein, befindet sich dieser in Betrieb und eine Konfiguration ist nicht möglich.
3 2BKonfiguration
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 29
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
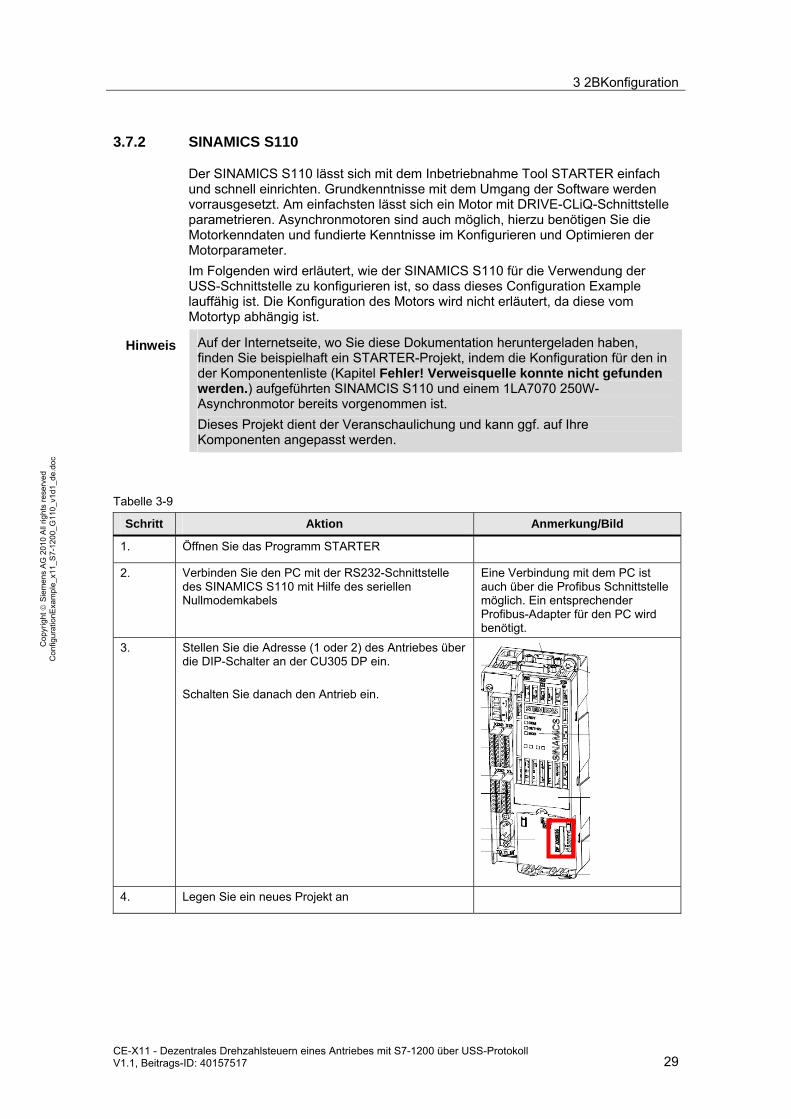
3.7.2 SINAMICS S110
Der SINAMICS S110 lässt sich mit dem Inbetriebnahme Tool STARTER einfach und schnell einrichten. Grundkenntnisse mit dem Umgang der Software werden vorrausgesetzt. Am einfachsten lässt sich ein Motor mit DRIVE-CLiQ-Schnittstelle parametrieren. Asynchronmotoren sind auch möglich, hierzu benötigen Sie die Motorkenndaten und fundierte Kenntnisse im Konfigurieren und Optimieren der Motorparameter.
Im Folgenden wird erläutert, wie der SINAMICS S110 für die Verwendung der USS-Schnittstelle zu konfigurieren ist, so dass dieses Configuration Example lauffähig ist. Die Konfiguration des Motors wird nicht erläutert, da diese vom Motortyp abhängig ist.
Hinweis Auf der Internetseite, wo Sie diese Dokumentation heruntergeladen haben, finden Sie beispielhaft ein STARTER-Projekt, indem die Konfiguration für den in der Komponentenliste (Kapitel Fehler! Verweisquelle konnte nicht gefunden werden.) aufgeführten SINAMCIS S110 und einem 1LA7070 250W-Asynchronmotor bereits vorgenommen ist.
Dieses Projekt dient der Veranschaulichung und kann ggf. auf Ihre Komponenten angepasst werden.
Tabelle 3-9
Schritt Aktion Anmerkung/Bild
1. Öffnen Sie das Programm STARTER
2. Verbinden Sie den PC mit der RS232-Schnittstelle des SINAMICS S110 mit Hilfe des seriellen Nullmodemkabels
Eine Verbindung mit dem PC ist auch über die Profibus Schnittstelle möglich. Ein entsprechender Profibus-Adapter für den PC wird benötigt.
3. Stellen Sie die Adresse (1 oder 2) des Antriebes über die DIP-Schalter an der CU305 DP ein. Schalten Sie danach den Antrieb ein.
4. Legen Sie ein neues Projekt an
3 2BKonfiguration
30 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
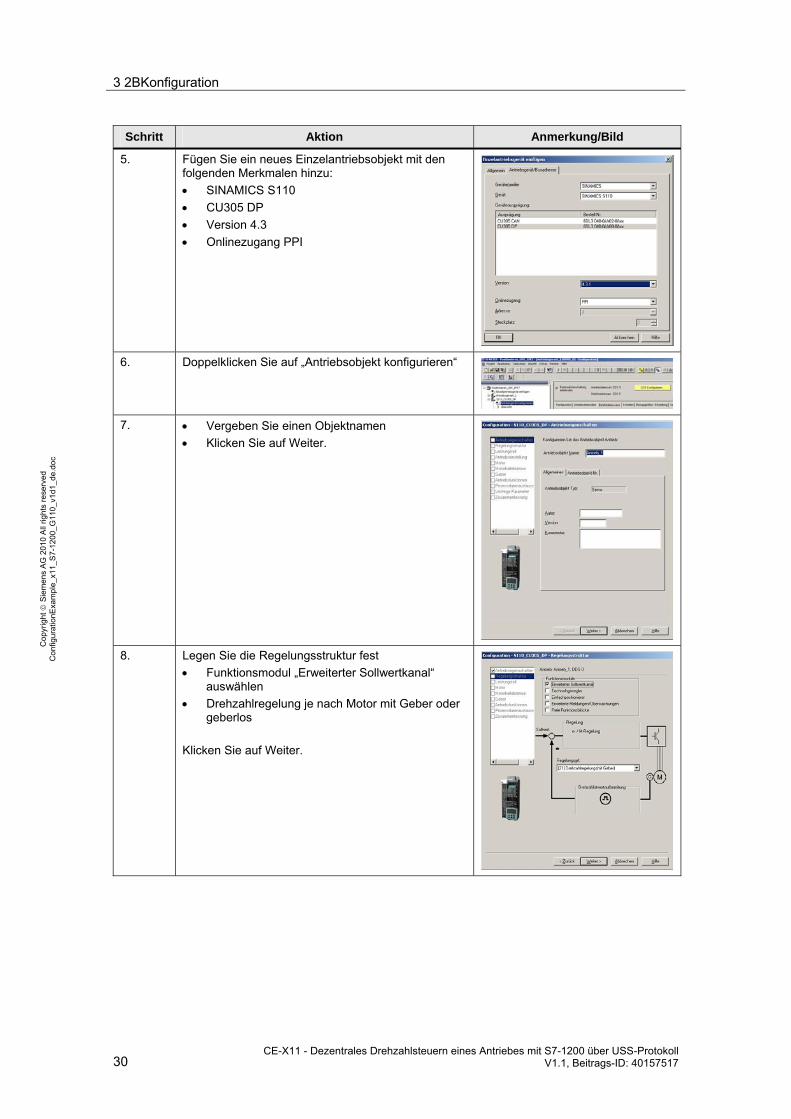
Schritt Aktion Anmerkung/Bild
5. Fügen Sie ein neues Einzelantriebsobjekt mit den folgenden Merkmalen hinzu:
SINAMICS S110
CU305 DP
Version 4.3
Onlinezugang PPI
6. Doppelklicken Sie auf „Antriebsobjekt konfigurieren“
Drehzahlregelung je nach Motor mit Geber oder geberlos
Klicken Sie auf Weiter.
3 2BKonfiguration
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 31
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
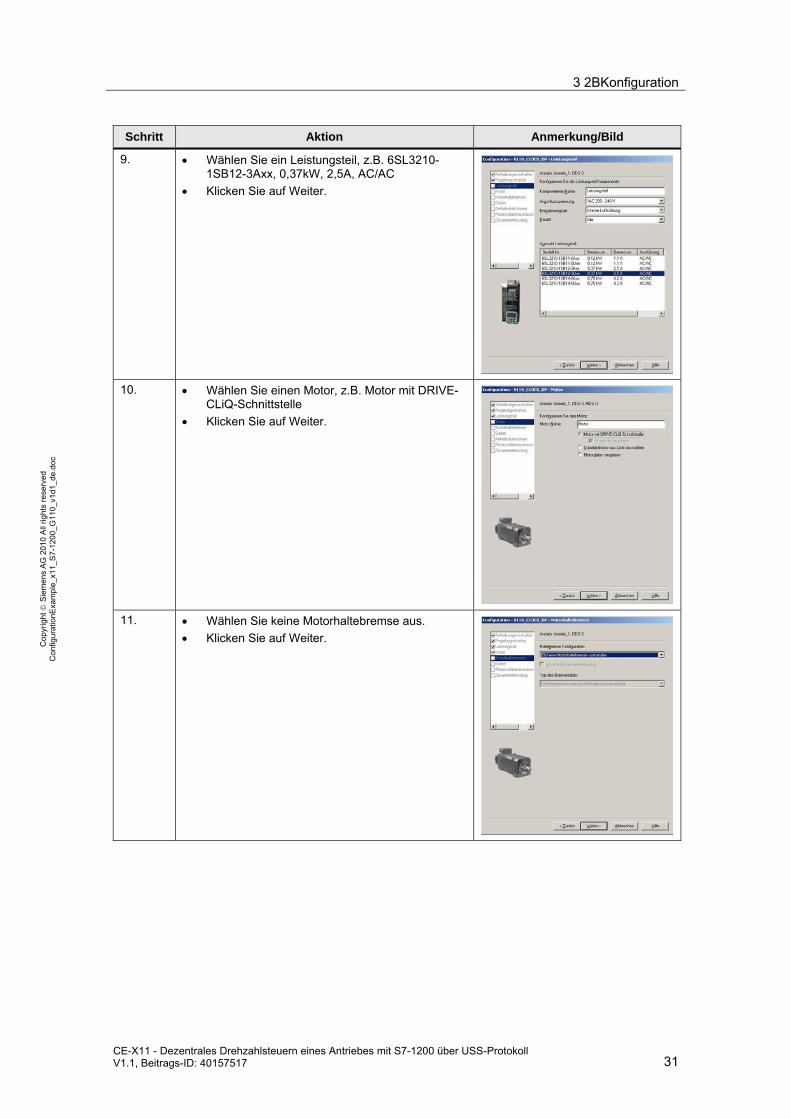
Schritt Aktion Anmerkung/Bild
9. Wählen Sie ein Leistungsteil, z.B. 6SL3210-1SB12-3Axx, 0,37kW, 2,5A, AC/AC
Klicken Sie auf Weiter.
10. Wählen Sie einen Motor, z.B. Motor mit DRIVE-CLiQ-Schnittstelle
Klicken Sie auf Weiter.
11. Wählen Sie keine Motorhaltebremse aus.
Klicken Sie auf Weiter.
3 2BKonfiguration
32 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
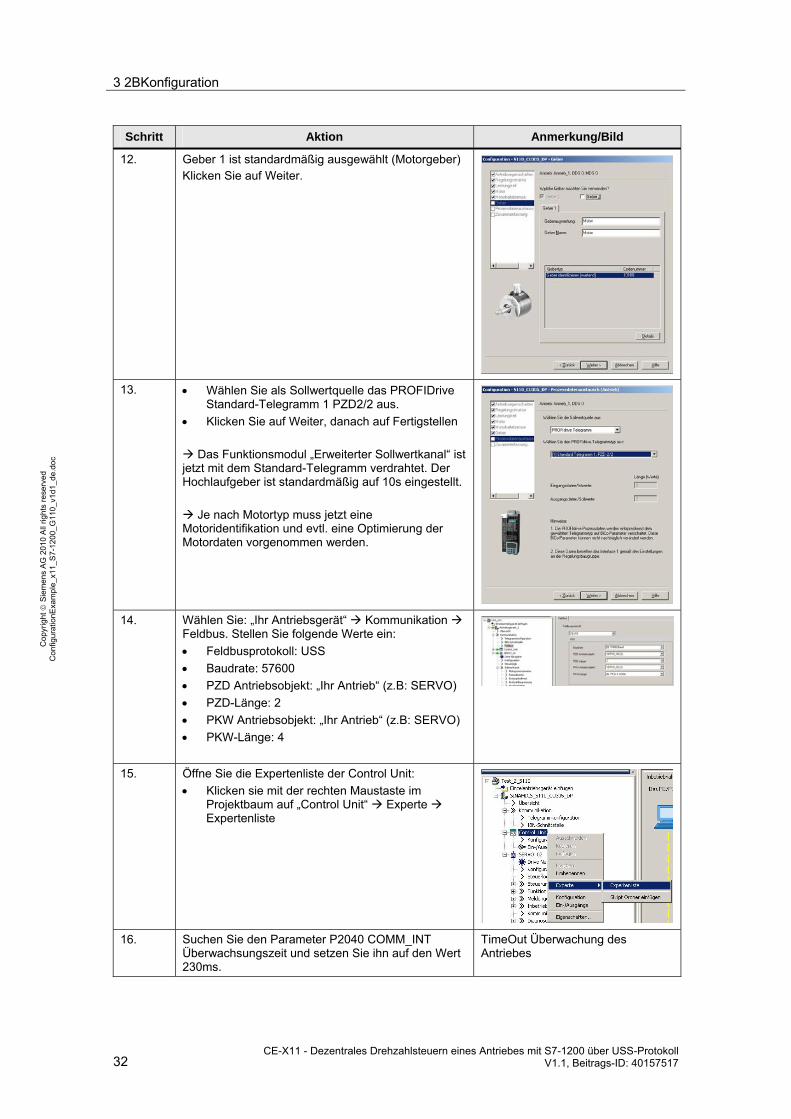
Schritt Aktion Anmerkung/Bild
12. Geber 1 ist standardmäßig ausgewählt (Motorgeber) Klicken Sie auf Weiter.
13. Wählen Sie als Sollwertquelle das PROFIDrive Standard-Telegramm 1 PZD2/2 aus.
Klicken Sie auf Weiter, danach auf Fertigstellen Das Funktionsmodul „Erweiterter Sollwertkanal“ ist jetzt mit dem Standard-Telegramm verdrahtet. Der Hochlaufgeber ist standardmäßig auf 10s eingestellt. Je nach Motortyp muss jetzt eine Motoridentifikation und evtl. eine Optimierung der Motordaten vorgenommen werden.
Klicken sie mit der rechten Maustaste im Projektbaum auf „Control Unit“ Experte Expertenliste
16. Suchen Sie den Parameter P2040 COMM_INT Überwachsungszeit und setzen Sie ihn auf den Wert 230ms.
TimeOut Überwachung des Antriebes
3 2BKonfiguration
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 33
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Schritt Aktion Anmerkung/Bild
17. Verbinden Sie sich mit dem Zielsystem
18. Laden Sie ihr Projekt in das Zielsystem und wählen Sie „von RAM nach ROM kopieren“ aus
3 2BKonfiguration
34 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
3.8 Bedienung der Applikation über HMI
3.8.1 Bedeutung der Softkeys
Tabelle 3-10
Schritt Aktion Anmerkung/Bild
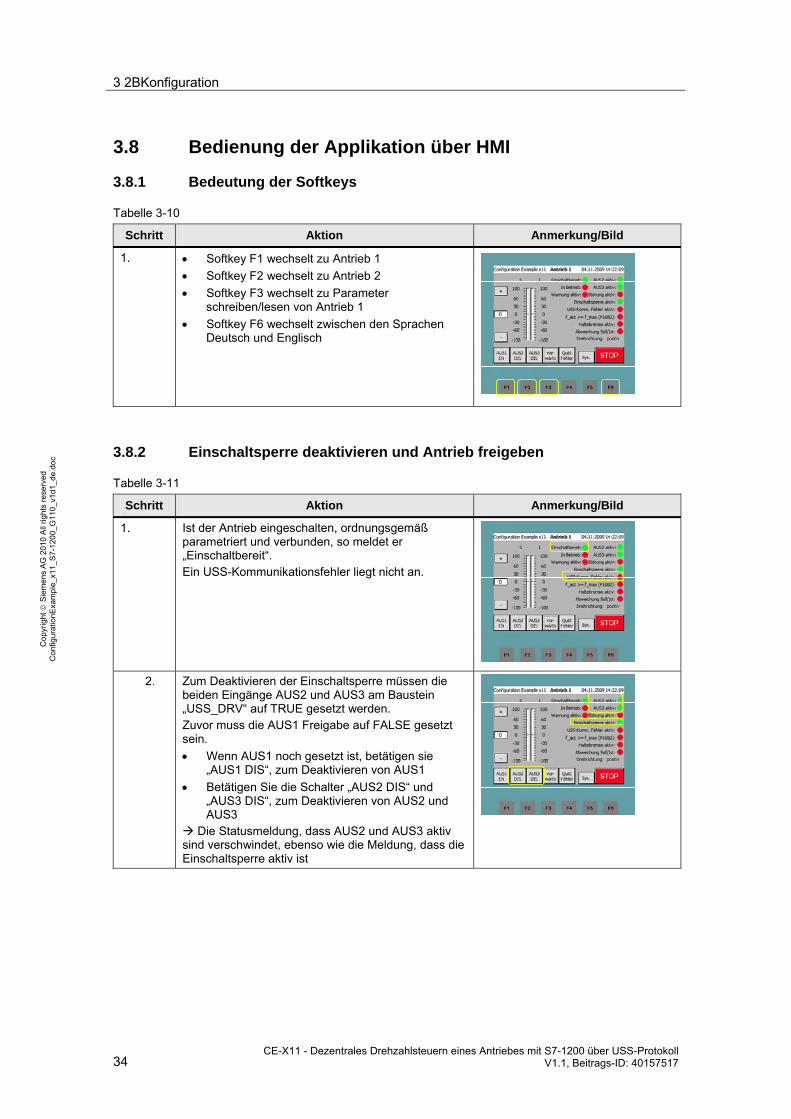
1. Softkey F1 wechselt zu Antrieb 1
Softkey F2 wechselt zu Antrieb 2
Softkey F3 wechselt zu Parameter schreiben/lesen von Antrieb 1
Softkey F6 wechselt zwischen den Sprachen Deutsch und Englisch
3.8.2 Einschaltsperre deaktivieren und Antrieb freigeben
Tabelle 3-11
Schritt Aktion Anmerkung/Bild
1. Ist der Antrieb eingeschalten, ordnungsgemäß parametriert und verbunden, so meldet er „Einschaltbereit“. Ein USS-Kommunikationsfehler liegt nicht an.
2. Zum Deaktivieren der Einschaltsperre müssen die beiden Eingänge AUS2 und AUS3 am Baustein „USS_DRV“ auf TRUE gesetzt werden. Zuvor muss die AUS1 Freigabe auf FALSE gesetzt sein.
Wenn AUS1 noch gesetzt ist, betätigen sie „AUS1 DIS“, zum Deaktivieren von AUS1
Betätigen Sie die Schalter „AUS2 DIS“ und „AUS3 DIS“, zum Deaktivieren von AUS2 und AUS3
Die Statusmeldung, dass AUS2 und AUS3 aktiv sind verschwindet, ebenso wie die Meldung, dass die Einschaltsperre aktiv ist
3 2BKonfiguration
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 35
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Schritt Aktion Anmerkung/Bild
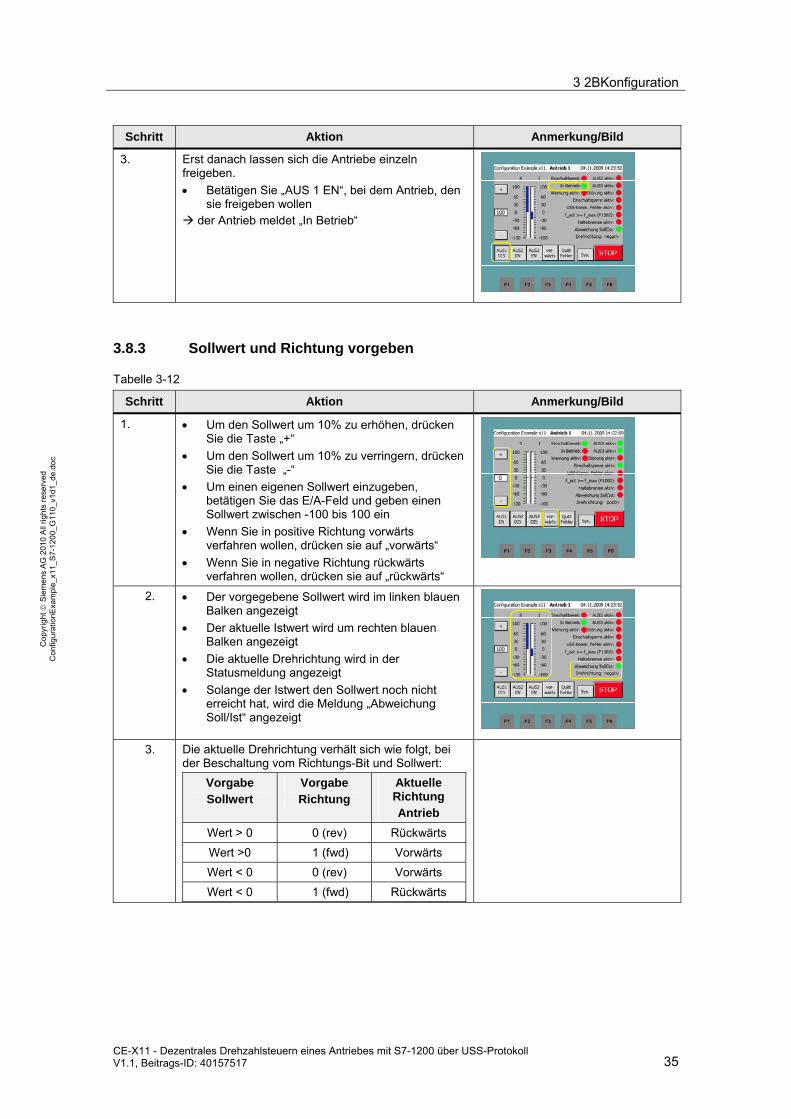
3. Erst danach lassen sich die Antriebe einzeln freigeben.
Betätigen Sie „AUS 1 EN“, bei dem Antrieb, den sie freigeben wollen
der Antrieb meldet „In Betrieb“
3.8.3 Sollwert und Richtung vorgeben
Tabelle 3-12
Schritt Aktion Anmerkung/Bild
1. Um den Sollwert um 10% zu erhöhen, drücken Sie die Taste „+“
Um den Sollwert um 10% zu verringern, drücken Sie die Taste „-“
Um einen eigenen Sollwert einzugeben, betätigen Sie das E/A-Feld und geben einen Sollwert zwischen -100 bis 100 ein
Wenn Sie in positive Richtung vorwärts verfahren wollen, drücken sie auf „vorwärts“
Wenn Sie in negative Richtung rückwärts verfahren wollen, drücken sie auf „rückwärts“
2. Der vorgegebene Sollwert wird im linken blauen Balken angezeigt
Der aktuelle Istwert wird um rechten blauen Balken angezeigt
Die aktuelle Drehrichtung wird in der Statusmeldung angezeigt
Solange der Istwert den Sollwert noch nicht erreicht hat, wird die Meldung „Abweichung Soll/Ist“ angezeigt
3. Die aktuelle Drehrichtung verhält sich wie folgt, bei der Beschaltung vom Richtungs-Bit und Sollwert:
Vorgabe Sollwert
Vorgabe Richtung
Aktuelle Richtung Antrieb
Wert > 0 0 (rev) Rückwärts
Wert >0 1 (fwd) Vorwärts
Wert < 0 0 (rev) Vorwärts
Wert < 0 1 (fwd) Rückwärts
3 2BKonfiguration
36 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
3.8.4 Freigabe entziehen, Motor stoppen
Tabelle 3-13
Schritt Aktion Anmerkung/Bild
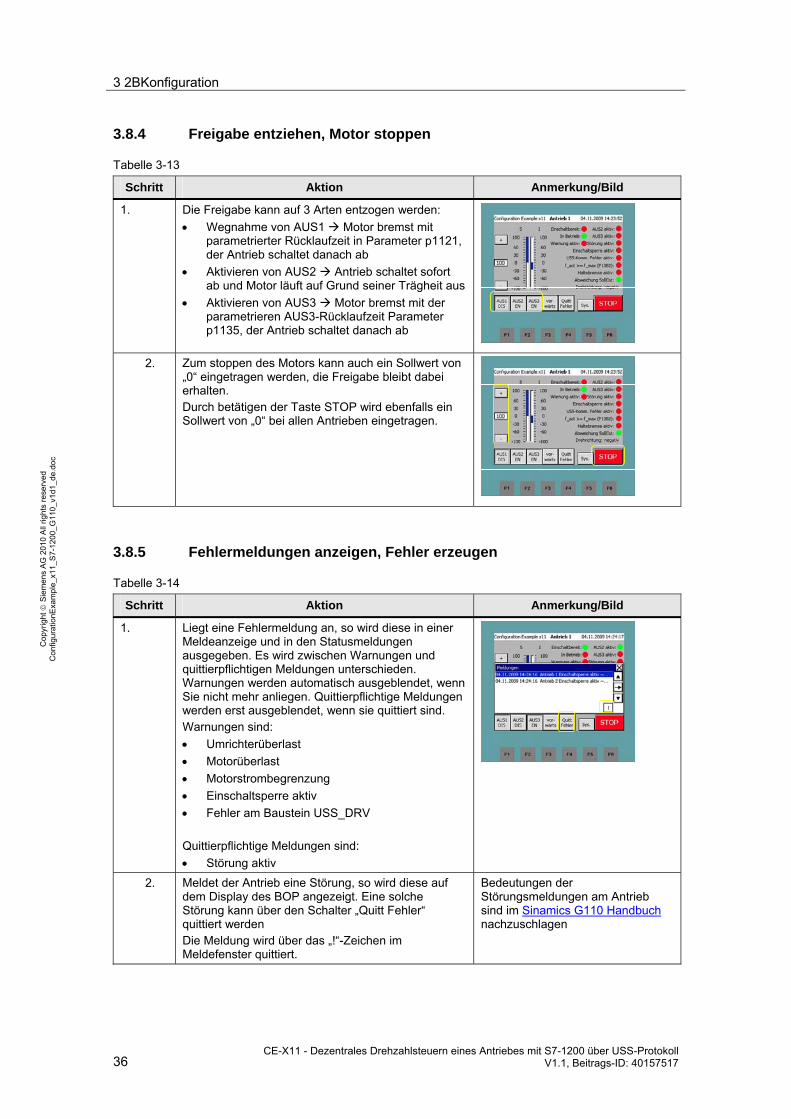
1. Die Freigabe kann auf 3 Arten entzogen werden:
Wegnahme von AUS1 Motor bremst mit parametrierter Rücklaufzeit in Parameter p1121, der Antrieb schaltet danach ab
Aktivieren von AUS2 Antrieb schaltet sofort ab und Motor läuft auf Grund seiner Trägheit aus
Aktivieren von AUS3 Motor bremst mit der parametrieren AUS3-Rücklaufzeit Parameter p1135, der Antrieb schaltet danach ab
2. Zum stoppen des Motors kann auch ein Sollwert von „0“ eingetragen werden, die Freigabe bleibt dabei erhalten. Durch betätigen der Taste STOP wird ebenfalls ein Sollwert von „0“ bei allen Antrieben eingetragen.
3.8.5 Fehlermeldungen anzeigen, Fehler erzeugen
Tabelle 3-14
Schritt Aktion Anmerkung/Bild
1. Liegt eine Fehlermeldung an, so wird diese in einer Meldeanzeige und in den Statusmeldungen ausgegeben. Es wird zwischen Warnungen und quittierpflichtigen Meldungen unterschieden. Warnungen werden automatisch ausgeblendet, wenn Sie nicht mehr anliegen. Quittierpflichtige Meldungen werden erst ausgeblendet, wenn sie quittiert sind. Warnungen sind:
Umrichterüberlast
Motorüberlast
Motorstrombegrenzung
Einschaltsperre aktiv
Fehler am Baustein USS_DRV Quittierpflichtige Meldungen sind:
Störung aktiv
2. Meldet der Antrieb eine Störung, so wird diese auf dem Display des BOP angezeigt. Eine solche Störung kann über den Schalter „Quitt Fehler“ quittiert werden Die Meldung wird über das „!“-Zeichen im Meldefenster quittiert.
Bedeutungen der Störungsmeldungen am Antrieb sind im Sinamics G110 Handbuch nachzuschlagen
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 37
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
Schritt Aktion Anmerkung/Bild
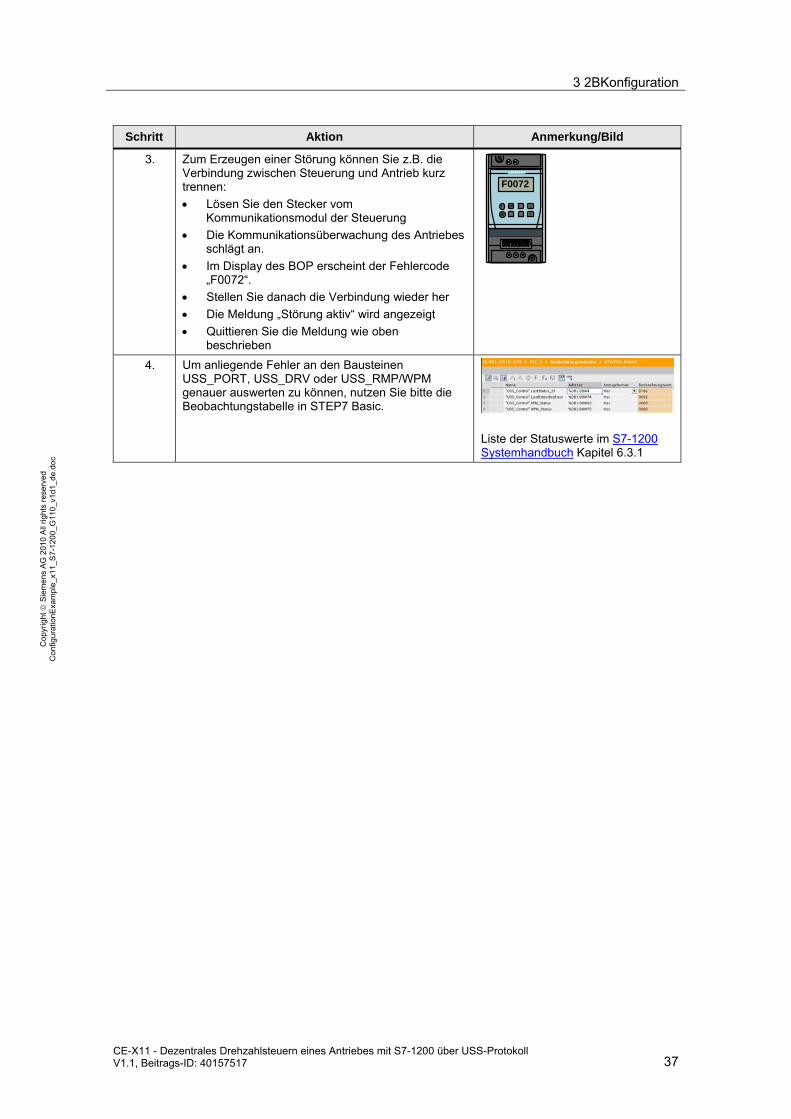
3. Zum Erzeugen einer Störung können Sie z.B. die Verbindung zwischen Steuerung und Antrieb kurz trennen:
Lösen Sie den Stecker vom Kommunikationsmodul der Steuerung
Die Kommunikationsüberwachung des Antriebes schlägt an.
Im Display des BOP erscheint der Fehlercode „F0072“.
Stellen Sie danach die Verbindung wieder her
Die Meldung „Störung aktiv“ wird angezeigt
Quittieren Sie die Meldung wie oben beschrieben
F0072s
6
BUS
0
OF
z1234567891
0
FM
s
6
U1234567891
s
F0072
4. Um anliegende Fehler an den Bausteinen USS_PORT, USS_DRV oder USS_RMP/WPM genauer auswerten zu können, nutzen Sie bitte die Beobachtungstabelle in STEP7 Basic.
Liste der Statuswerte im S7-1200 Systemhandbuch Kapitel 6.3.1
38 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
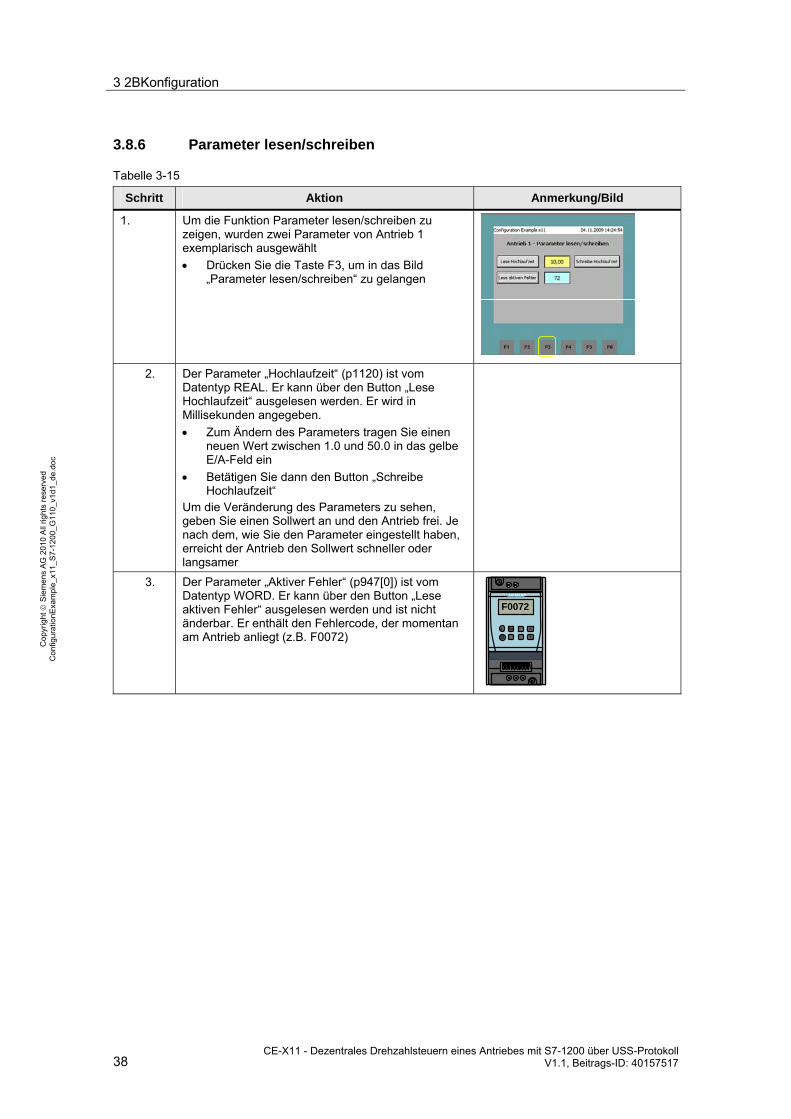
3.8.6 Parameter lesen/schreiben
Tabelle 3-15
Schritt Aktion Anmerkung/Bild
1. Um die Funktion Parameter lesen/schreiben zu zeigen, wurden zwei Parameter von Antrieb 1 exemplarisch ausgewählt
Drücken Sie die Taste F3, um in das Bild „Parameter lesen/schreiben“ zu gelangen
2. Der Parameter „Hochlaufzeit“ (p1120) ist vom Datentyp REAL. Er kann über den Button „Lese Hochlaufzeit“ ausgelesen werden. Er wird in Millisekunden angegeben.
Zum Ändern des Parameters tragen Sie einen neuen Wert zwischen 1.0 und 50.0 in das gelbe E/A-Feld ein
Betätigen Sie dann den Button „Schreibe Hochlaufzeit“
Um die Veränderung des Parameters zu sehen, geben Sie einen Sollwert an und den Antrieb frei. Je nach dem, wie Sie den Parameter eingestellt haben, erreicht der Antrieb den Sollwert schneller oder langsamer
3. Der Parameter „Aktiver Fehler“ (p947[0]) ist vom Datentyp WORD. Er kann über den Button „Lese aktiven Fehler“ ausgelesen werden und ist nicht änderbar. Er enthält den Fehlercode, der momentan am Antrieb anliegt (z.B. F0072)
F0072s
6
BUS
0
OF
z1234567891
0
FM
s
6
U1234567891
s
F0072
4 3BCodeelemente
CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll V1.1, Beitrags-ID: 40157517 39
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
4 Codeelemente
4.1 Vorbemerkung
Wir bieten Ihnen Softwarebeispiele mit Testcode und Testparametern als Download an. Die Softwarebeispiele unterstützen Sie bei den ersten Schritten und Tests mit dem Configuration Example.
Die Softwarebeispiele sind immer den im Configuration Example verwendeten Komponenten zugeordnet und zeigen deren prinzipielles Zusammenspiel. Sie stellen aber selbst keine realen Anwendungen im Sinne einer technologischen Problemlösung mit definierbaren Eigenschaften dar.
4.2 Download
Die Softwarebeispiele finden Sie auf der HTML-Seite, von welcher Sie dieses Dokument geladen haben.
Tabelle 4-1
Dateiname Inhalt
CE_x11_S7-1200_v1d0.zip STEP 7 Basic Projekt für S7-1200 CPU1211C und KTP600
CE_x11_STARTER_S110_v1d0.zip STARTER Projektbeispiel für SINAMICS S110
5 4BHistorie
40 CE-X11 - Dezentrales Drehzahlsteuern eines Antriebes mit S7-1200 über USS-Protokoll
V1.1, Beitrags-ID: 40157517
Co
pyr
igh
t
Sie
me
ns
AG
20
10
All
righ
ts r
ese
rve
d
Co
nfig
ura
tionE
xam
ple
_x1
1_S
7-1
20
0_G
110_
v1d
1_d
e.d
oc
5 Historie Tabelle 5-1
Version Datum Änderung
V1.0 04.12.2009 Erste Ausgabe
V1.1 19.01.2010 Änderungen an der SINAMICS S110 Inbetriebnahme