Verteidigung zur Diplomarbeit Fakultät Informatik, Institut für Technische Informatik, Professur für VLSI Entwurfssysteme, Diagnostik und Architektur Dresden, 12.12.13 Simon Willeke [email protected]3D-Punktkorrelation auf Basis von 2D-Bildern auf einer FPGA-Plattform
Transcript
Verteidigung zur Diplomarbeit
Fakultät Informatik, Institut für Technische Informatik, Professur für VLSI Entwurfssysteme, Diagnostik und Architektur
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 18 von 34
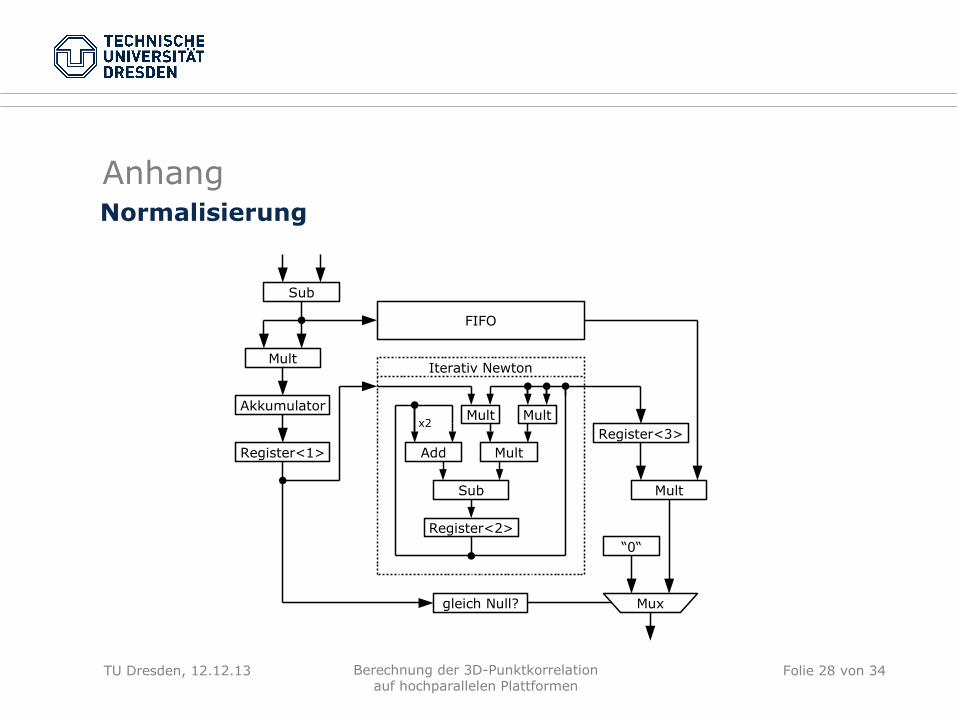
Normalisierung
• DRAM Ausgabe liefert 8 Bursts je 6 Pixel
• Parallele Festkomma-Arithmetik Pipelines je Pixel• Mittelwert: Akkumulation und
Konstantenmultiplikation• Inverse Quadratwurzel: iteratives Newton
Verfahren
• Normalisierte Grauwerte weiter zum Zeilencache
3 FPGA Entwurf
nx, y , s=(gx , y ,s−gx , y)
√∑s=1
N
(gx , y, s−gx , y )2
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 19 von 34
Punktsuche und Zeilencache
• Suche homologe Punktpaare mit maximaler Korrelation
• Einfach in Hardware, aber:• hohe Zugriffsparallelität erforderlich
48 Worte je Takt• Speicherorganisation schlecht auf BlockRAM abbildbar
3 FPGA Entwurf
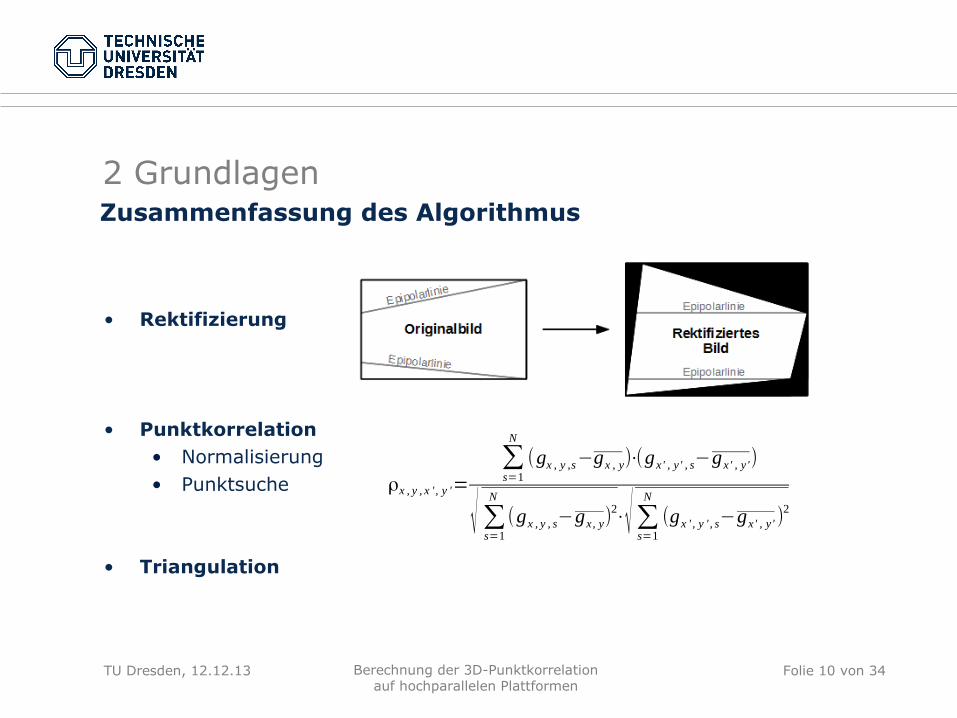
ρx , y , x ' , y '=∑s=1
N
(nx , y , s⋅nx ' , y' , s)
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 20 von 34
Punktsuche und Zeilencache
• Suche homologe Punktpaare mit maximaler Korrelation• Zur Erinnerung:
• Einfach in Hardware, aber:• hohe Zugriffsparallelität erforderlich
48 Worte je Takt• Speicherorganisation schlecht auf BlockRAM abbildbar: Schreibvorgang
3 FPGA Entwurf
ρx , y , x ' , y '=∑s=1
N
(nx , y , s⋅nx ' , y' , s)
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 21 von 34
Punktsuche und Zeilencache
• Suche homologe Punktpaare mit maximaler Korrelation• Zur Erinnerung:
• Einfach in Hardware, aber:• hohe Zugriffsparallelität erforderlich
48 Worte je Takt• Speicherorganisation schlecht auf BlockRAM abbildbar: Lesevorgang
3 FPGA Entwurf
ρx , y , x ' , y '=∑s=1
N
(nx , y , s⋅nx ' , y' , s)
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 22 von 34
• 11 Rekonstruktionen je Sekunde erreichbar• Vergleich Software: 2 Rekonstruktionen• Mit PCIe bis zu 34 Rekonstruktionen
• Ethernet stellt Flaschenhals dar• Teilmodule gut parallelisierbar
• Weitere Beschleunigung durch größere FPGAs möglich
• Verfeinerung der Punktzuordnung (Subpixelrefinement)• schlecht für FPGA geeignet• in Software sehr effizient
5 Ergebnisse
Software Virtex6 mit Ethernet
Virtex6 mit PCIe (geschätzt)
Virtex7 (geschätzt)
0
20
40
60
80
100
120
140
160
1,98
11,34
34,68
139,47
Rekonstruktionen je Sekunde
Hz
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 23 von 34
Quellen
[1] S. Willeke. Untersuchung der Berechnung der 3D-Punktkorrelation auf hochparallelen Plattformen. Großer Beleg, Technische Universität Dresden, Fakultät Informatik, Institut für Technische Informatik, November 2012.
[2] P. Albrecht et al. (1998): „Improvement of the Spatial Resolution of an optical 3-D measurement Procedure“, IEEE Transactions on Instrumentation and Measurement, Vol. 47. No. 1, February 1998.
[4] T. Luhmann. Nahbereichsphotogrammetrie. Grundlagen, Methoden und Anwendun-gen. Herbert Wichmann Verlag, Heidelberg, 2003.
[5] M. Schaffer, M. Grosse, R. Kowarschik. High-speed pattern projection for three-dimensional shape measurement using laser speckles. Applied Optics, 49(18): S 3622–3629, Juni 2010.
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 24 von 34
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 25 von 34
AnhangRektifizierung
Proje
ktiv
e Tra
nsf
orm
atio
n
Interpolation
Interpolation
Interpolation
Interpolation
Interpolation
Bildcache
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 26 von 34
AnhangRektifizierung
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen
Folie 27 von 34
Normalisierung
Anhang
DRAM Output
1010 10 1010
MAC
10 10 10
Register
Normali-sierung
Zeilencache
MAC
Register
MAC
Register
MAC
Register
MAC
Register
MAC
Register
MAC
Register
MAC
Register
FIFO
Normali-sierung
Normali-sierung
Normali-sierung
Normali-sierung
Normali-sierung
Normali-sierung
Normali-sierung
TU Dresden, 12.12.13 Berechnung der 3D-Punktkorrelationauf hochparallelen Plattformen




















![FESTSCHRIFT - UZH852f11ee-4472-428d-8d8d...9q> ü>, q2:6 Ffr c 'iy Sc) \) ta ra ad h ^ r{] r\ tr o r E an tr N o hI) * o E o o C) rl] o\ o\ \o tr o o ä0:ad k F o r U) N-o o](https://static.unterlagen.site/doc/80x56/609b8aceca27ab0ac43714f6/festschrift-uzh-852f11ee-4472-428d-8d8d-9q-q26-ffr-c-iy-sc-.jpg)














